

Journal of System Simulation ›› 2022, Vol. 34 ›› Issue (11): 2368-2376.doi: 10.16182/j.issn1004731x.joss.21-0538
• Modeling Theory and Methodology • Previous Articles Next Articles
Guangjian Tian( ), Jiyang Dai(), Jin Ying, Ning Wang
), Jiyang Dai(), Jin Ying, Ning Wang
Received:2021-06-09
Revised:2021-07-21
Online:2022-11-18
Published:2022-11-25
Contact:
Jiyang Dai
E-mail:2652433103@qq.com;djiyang@163.com
CLC Number:
Guangjian Tian, Jiyang Dai, Jin Ying, Ning Wang. Multi-UAV Trajectory Planning Based on Adaptive Segmented Potential Field Method[J]. Journal of System Simulation, 2022, 34(11): 2368-2376.
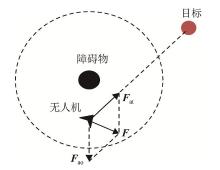
Fig. 1
Force analysis of traditional artificial potential field method
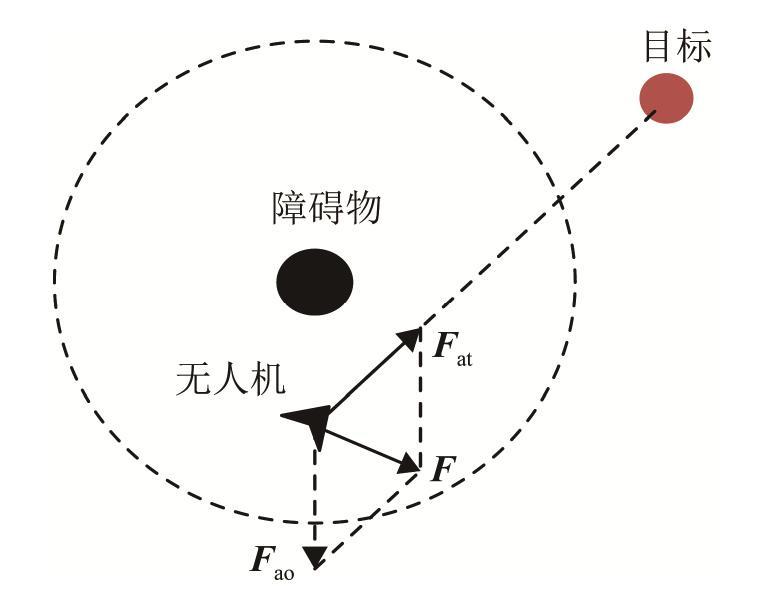
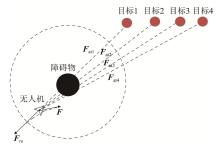
Fig. 2
Force analysis of the UAV guided by the compound attractive field to break through the local extreme value
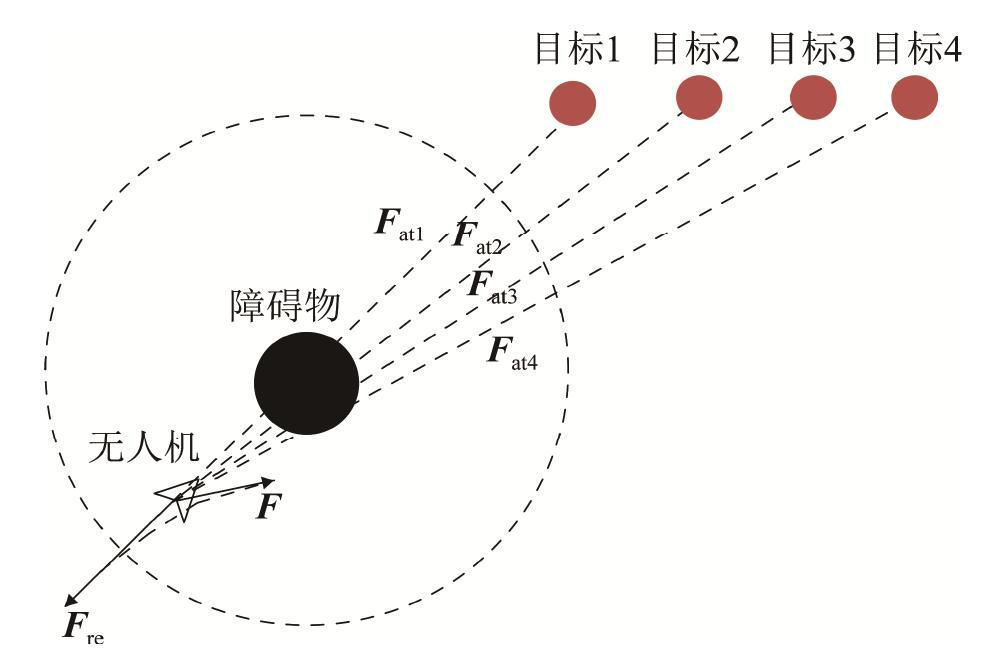
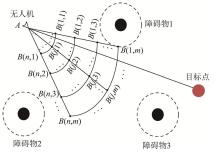
Fig. 3
Principle of layered potential field method
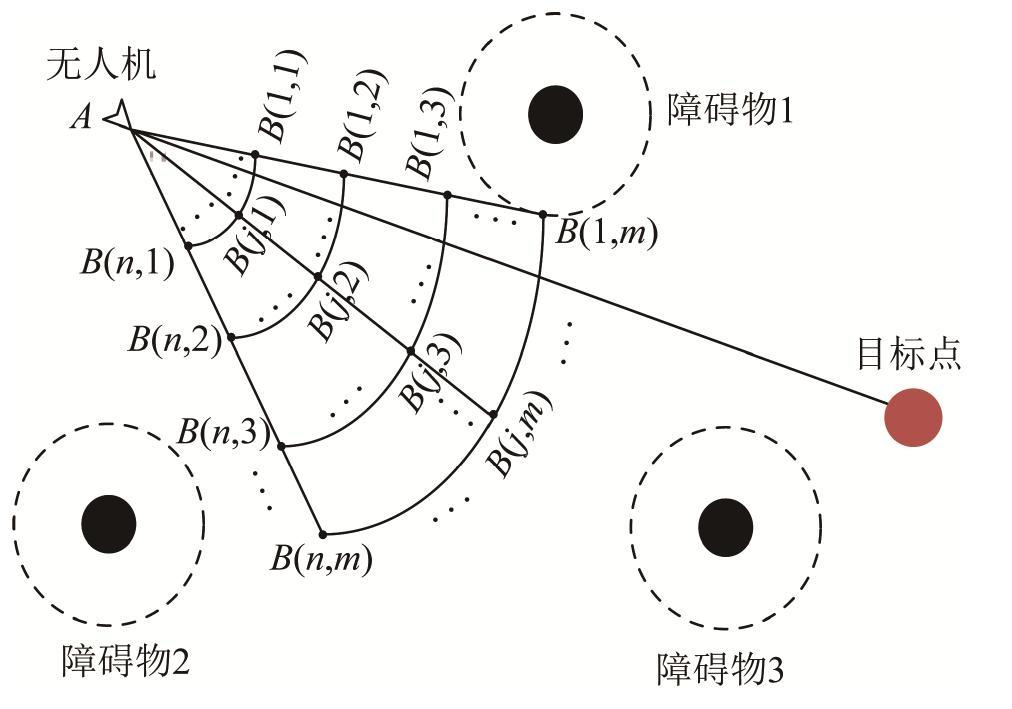
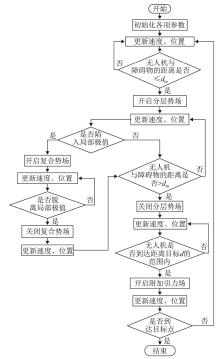
Fig. 4
Flow chart of adaptive segmented potential field algorithm
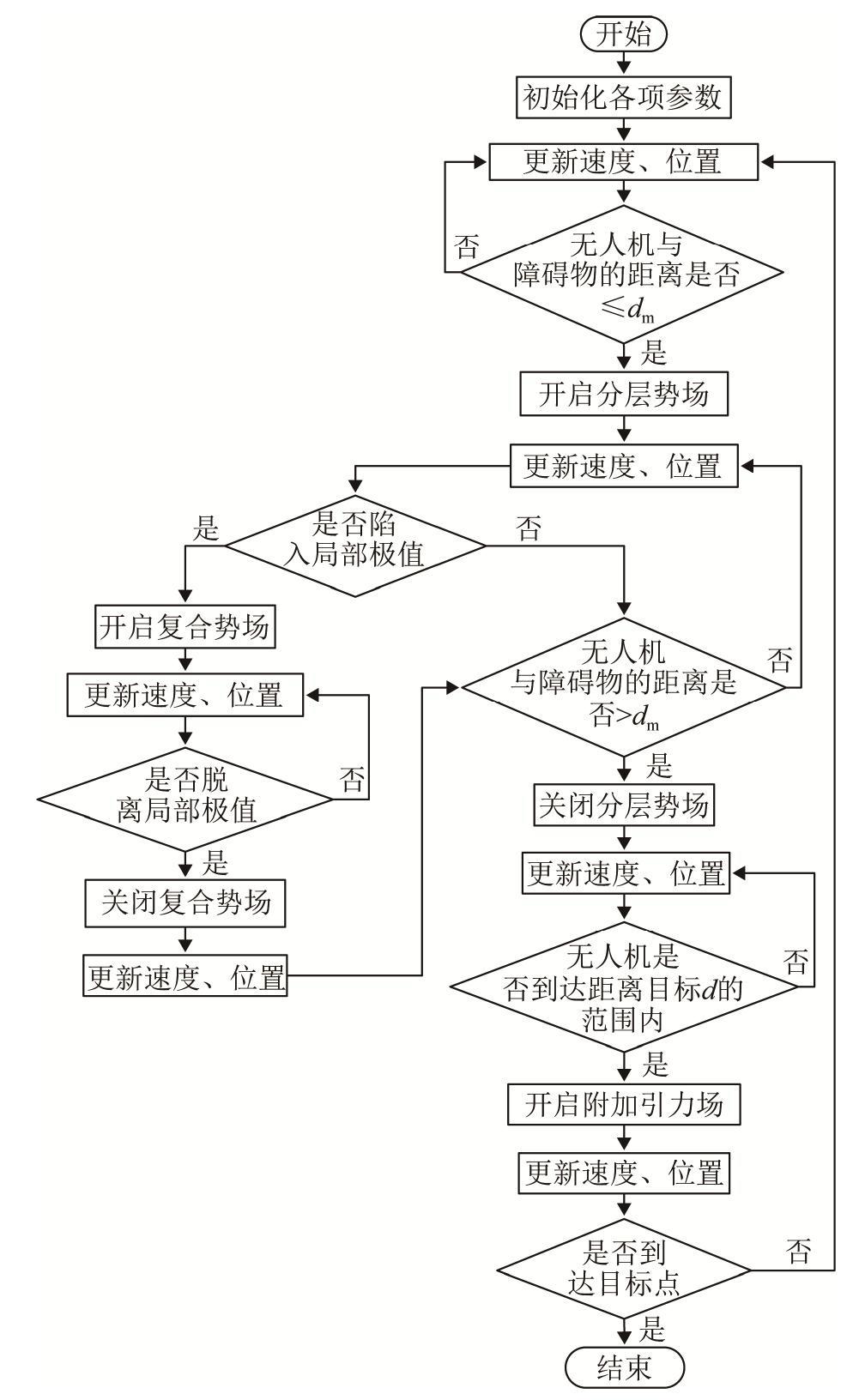
Table 1
Specific location of obstacles in simulation diagram
| 障碍物 | 编号 | 具体位置 |
|---|---|---|
| 山峰 | 1 | 400, 200, 0 |
| 2 | 200, 300, 0 | |
| 3 | 95, 300, 0 | |
| 恶劣天气 | 1 | 0, 500, 0 |
| 雷达 | 1 | 300, 450, 0 |
| 2 | 450, 400, 0 | |
| 3 | 340, 330, 0 | |
| 4 | 200, 180, 0 | |
| 5 | 450, 400, 0 | |
| 导弹 | 1 | 200, 200, 80 |
| 2 | 125, 125, 110 | |
| 3 | 300, 350, 90 | |
| 4 | 250, 250, 120 | |
| 5 | 200, 200, 75 | |
| 6 | 400, 350, 130 |
Fig. 5
Complex simulation environment
Table 2
Potential field function parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| α | 1.5 | γ | 10 |
| β | 0.1 | νmax | 5 |
| η | 2.0 | ε | 4 300 |
Table 3
UAV and target location information
| 无人机 | 目标 |
|---|---|
| (30, 30, 110) | (450, 450, 110) |
| (15, 21.397 0, 85.505 1) | (435, 441.339 7, 85.505 1) |
| (30, 47.320 5, 85.505 1) | (450, 467.320 5, 85.505 1) |
| (45, 21.339 7, 85.505 1) | (465, 441.339 7, 85.550 1) |
Table 4
Time and length of each planning method
| 方法 | 时间/s | 航线长度/km |
|---|---|---|
| 附加引力场和复合引力场算法 | 65.994 2 | 669.822 5 |
| 613.036 3 | ||
| 608.454 3 | ||
| 598.539 8 | ||
| 对比算法一 | 212.197 4 | 618.830 2 |
| 626.496 9 | ||
| 615.069 4 | ||
| 614.523 5 | ||
| 对比算法二 | 63.579 6 | 618.339 2 |
| 613.952 4 | ||
| 608.770 0 | ||
| 595.721 5 | ||
| 自适应分段势场算法 | 62.979 9 | 617.627 6 |
| 610.596 3 | ||
| 612.765 1 | ||
| 610.057 4 |
Fig. 6
Traditional artificial potential field algorithm
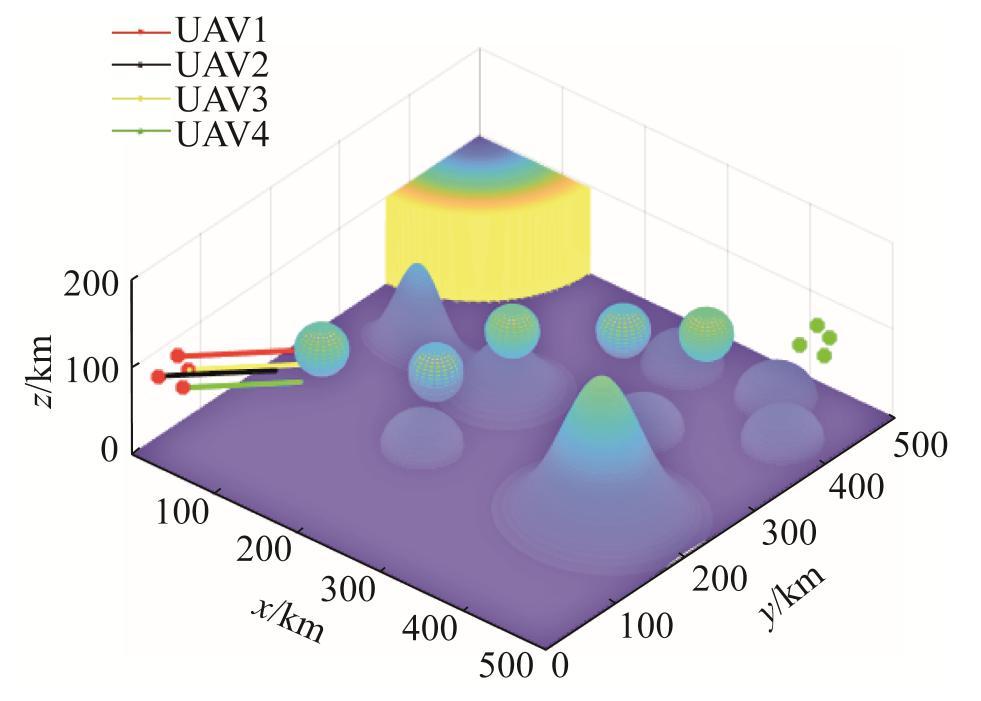
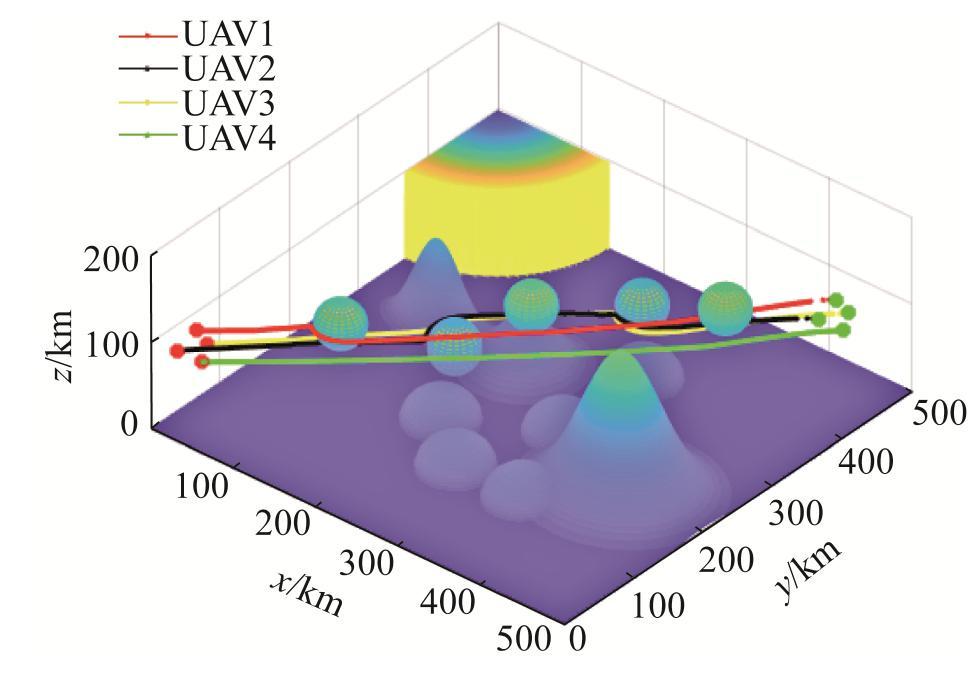
Fig. 10
Adaptive segmented potential field algorithm
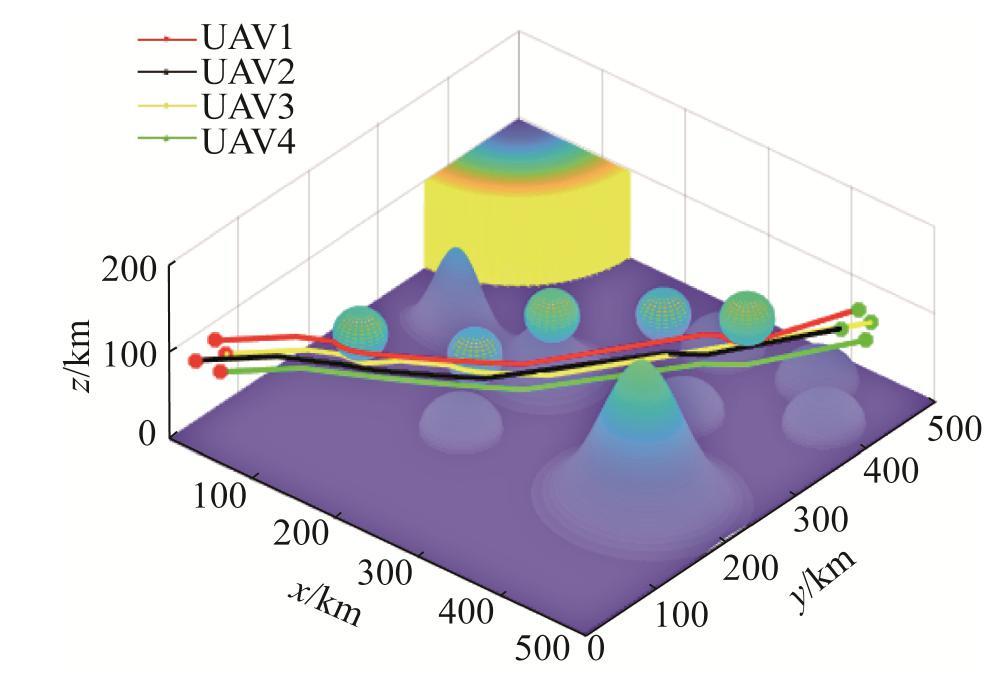
Fig. 7
Adding additional attractive field and compound attractive field
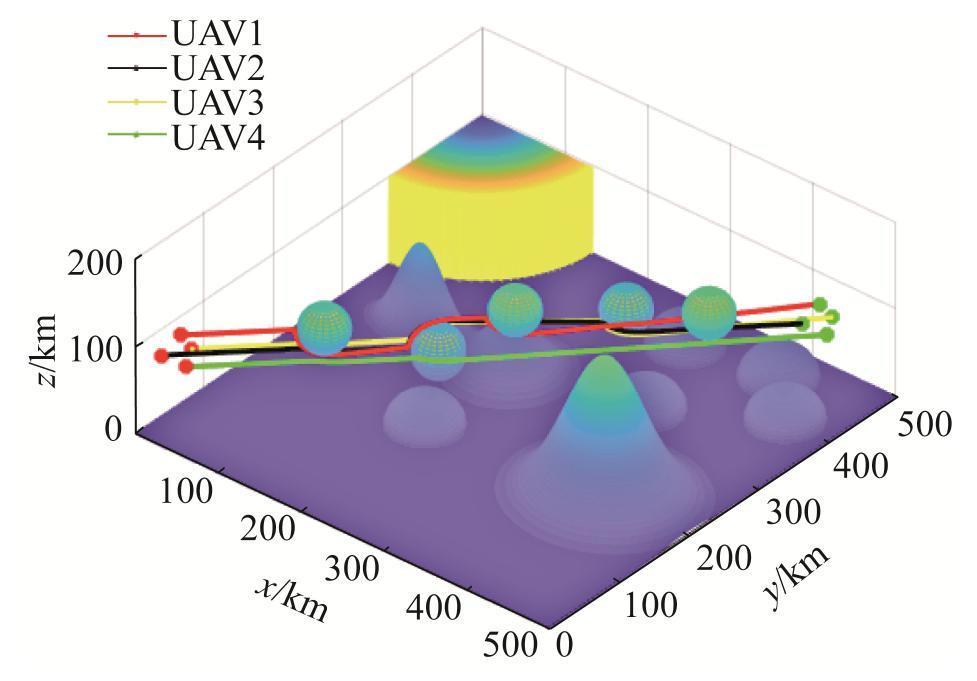
Fig. 8
Comparison algorithm one
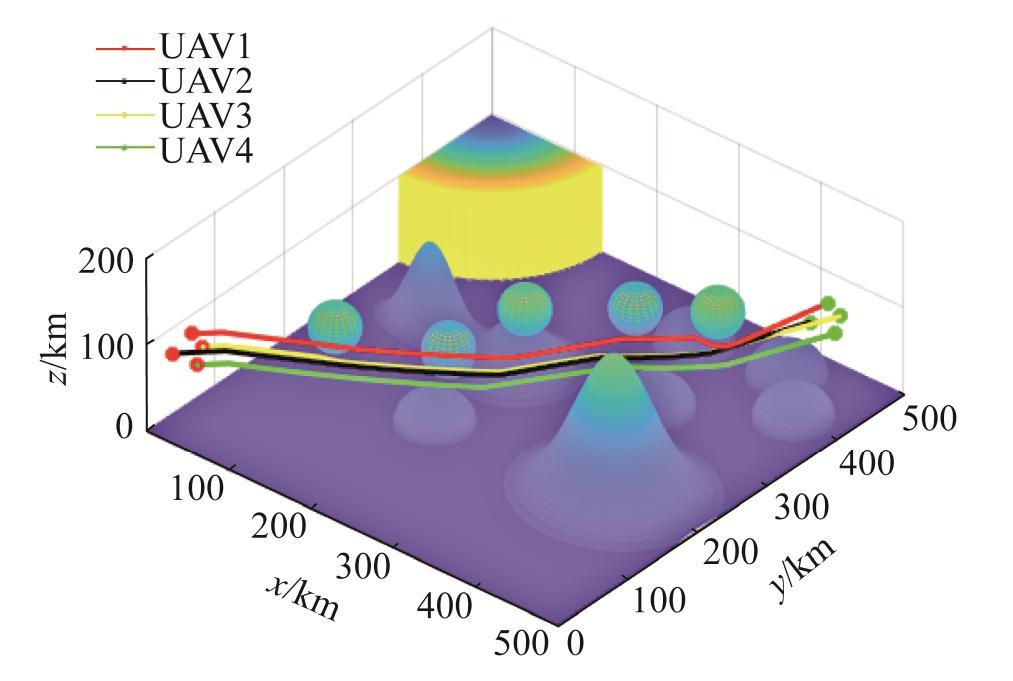
Fig. 9
Comparison algorithm two
| [1] | Liu Chenguang, Mao Qingzhou, Chu Xiumin, et al. An Improved A-Star Algorithm Considering Water Current, Traffic Separation and Berthing for Vessel Path Planning[J]. Applied Sciences (S0305-0548), 2019, 9(6): 1057. |
| [2] | Mohammed H, Romdhane L, Jaradat M A. RRT* N: An Efficient Approach to Path Planning in 3D for Static and Dynamic Environments[J]. Advanced Robotics (S0169-1864), 2021, 35(3/4): 168-180. |
| [3] | Zhou Q, Zhou Y. Wolf Colony Search Algorithm Based on Leader Strategy[J]. Application Research of Computers (S0305-0548), 2013, 30(9): 2629-2632. |
| [4] | Haghighi H, Sadati S H, Dehghan S M, et al. Hybrid Form of Particle Swarm Optimization and Genetic Algorithm for Optimal Path Planning in Coverage Mission by Cooperated Unmanned Aerial Vehicles[J]. Journal of Aerospace Technology and Management (S1984-9648), 2020, 12: 1169. |
| [5] | 朱大奇, 朱婷婷, 颜明重. 基于改进神经网络的多AUV全覆盖路径规划[J]. 系统仿真学报, 2020, 32(8): 1505-1514. |
| Zhu Daqi, Zhu Tingting, Yan Mingzhong. Multi-AUV Complete Coverage Path Planning Based on Improved Neural Network[J]. Jurnal of System Simulation, 2020, 32(8): 1505-1514. | |
| [6] | Zhang Honghan, Guo Yanyang, Xu Yajie, et al. Mission Planning Method of Multi-UUV Search Submarine Acoustic Beacon[J]. Chinese Journal of Ship Research (S1000-9604), 2020, 15(1): 1-9. |
| [7] | Biswas S, Anavatti S G, Garratt M A. Obstacle Avoidance for Multi-agent Path Planning Based on Vectorized Particle Swarm Optimization[M]. Springer, Cham: Intelligent and Evolutionary Systems, 2017: 61-74. |
| [8] | Sang H, You Y, Sun X, et al. The Hybrid Path Planning Algorithm Based on Improved A* and Artificial Potential Field for Unmanned Surface Vehicle Formations[J]. Ocean Engineering (S0029-8018), 2021, 223: 108709. |
| [9] | Fan X, Guo Y, Liu H, et al. Improved Artificial Potential Field Method Applied for AUV Path Planning[J]. Mathematical Problems in Engineering (S1024-123X), 2020(1): 1-21. |
| [10] | 林立雄, 何洪钦, 何炳蔚, 等. 基于改进人工势场模型的无人机局部避障方法[J]. 华中科技大学学报(自然科学版), 2021, 49(8): 86-91. |
| Lin Lixiong, He Hongqin, He Bingwei, et al. Local Obstacle Avoidance Method for Unmanned Aerial Vehicle Based on Improved Artificial Potential Field[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2021, 49(8): 86-91. | |
| [11] | 陈廷楠. 飞机飞行性能品质与控制[M]. 北京: 国防工业出版社, 2010: 21-27. |
| Chen Tingnan. Aircraft Flight Performance Quality and Control[M]. Beijing: National Defense Industry Press, 2010: 21-27. | |
| [12] | Khatib O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots[J]. International Joumal of Robotics Research (S0278-3649), 1986, 5(1): 90-98. |
| [13] | 张殿富, 刘福. 基于人工势场法的路径规划方法研究及展望[J]. 计算机工程与科学, 2013, 35(6): 88-95. |
| Zhang Dianfu, Liu Fu. Research and Development Trend of Path Planning Based on Artificial Field Method[J]. Computer Engineering & Science, 2013, 35(6): 88-95. | |
| [14] | 曲成刚, 曹喜滨, 张泽旭. 人工势场和虚拟领航者结合的多智能体编队[J]. 哈尔滨工业大学学报, 2014, 46(5): 1-5. |
| Qu Chenggang, Cao Xibin, Zhang Zexu. Multi-agent System Formation Integrating Virtual Leaders into Artificial Potentials[J]. Journal of Harbin institute of technology, 2014, 46(5): 1-5. | |
| [15] | 代冀阳, 王村松, 殷林飞, 等. 飞行器分层势场路径规划算法[J]. 控制理论与应用, 2015, 32(11): 1505-1510. |
| Dai Jiyang, Wang Cunsong, Yin Linfei, et al. Aircraft Layered Potential Field Path Planning Algorithm[J]. Control Theory and Applications, 2015, 32(11): 1505-1510. | |
| [16] | 王宁, 代冀阳, 应进, 等. 基于自适应扩展势场的多无人机航迹规划仿真[J]. 系统仿真学报, 2021, 33(9): 2147-2156. |
| Wang Ning, Dai Jiyang, Ying Jin, et al. Multi-UAV Trajectory Planning Simulation Based on Adaptive Extended Potential Field[J]. Journal of System Simulation, 2021, 33(9): 2147-2156. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [3] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [4] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [5] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| [6] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [7] | Wang Zhu, Zhang Zhenpeng, Zhang Mengtong, Xu Guangtong. Sequential Convex Programming Using Safe Flight Corridor for Trajectory Planning of UAVs [J]. Journal of System Simulation, 2025, 37(1): 134-144. |
| [8] | Xiao Peng, Xie Feng, Ni Haihong, Zhang Min, Tang Zhili, Li Ni. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning [J]. Journal of System Simulation, 2024, 36(5): 1141-1151. |
| [9] | Yu Xiang, Deng Qianrui, Duan Sirui, Jiang Chen. A Multi-UAV Collaborative Priority Coverage Search Algorithm [J]. Journal of System Simulation, 2024, 36(4): 991-1000. |
| [10] | Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance [J]. Journal of System Simulation, 2024, 36(3): 545-554. |
| [11] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [12] | Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(3): 782-794. |
| [13] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [14] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| [15] | Wang Man, Li Dapeng, Ding Lianghui, Zhu Tianlin. Formation Obstacle Avoidance Algorithm Based on Joint Virtual Sub-target and Boundary Force [J]. Journal of System Simulation, 2023, 35(9): 1918-1930. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
