

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (1): 134-144.doi: 10.16182/j.issn1004731x.joss.23-1026
• Papers • Previous Articles Next Articles
Wang Zhu1, Zhang Zhenpeng1, Zhang Mengtong1, Xu Guangtong2
Received:2023-08-18
Revised:2023-09-16
Online:2025-01-20
Published:2025-01-23
CLC Number:
Wang Zhu, Zhang Zhenpeng, Zhang Mengtong, Xu Guangtong. Sequential Convex Programming Using Safe Flight Corridor for Trajectory Planning of UAVs[J]. Journal of System Simulation, 2025, 37(1): 134-144.
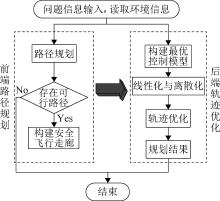
Fig. 1
Flowchart of hierarchical planning framework
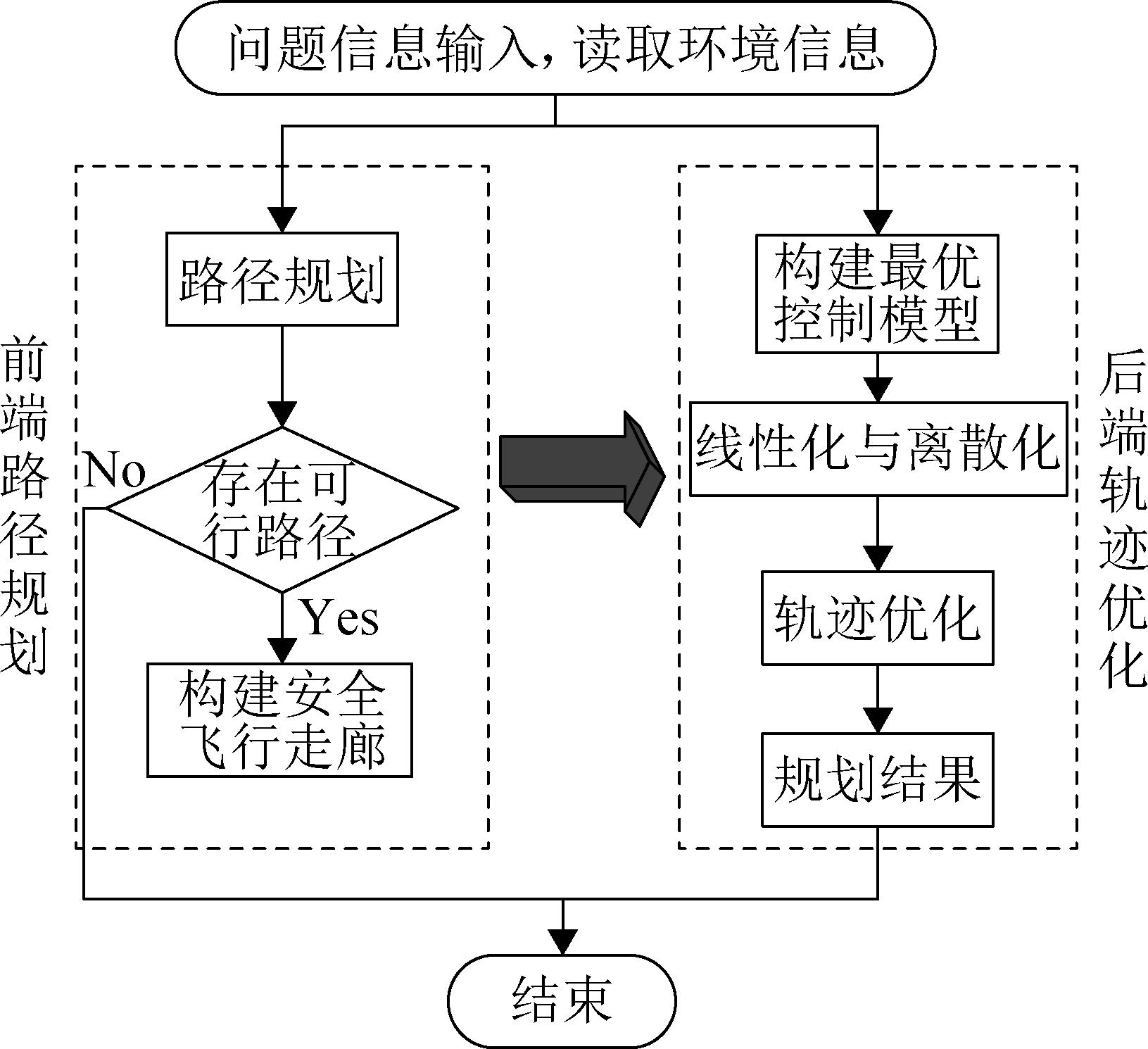
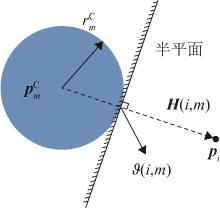
Fig. 2
Half plane decided by cylindrical obstacle
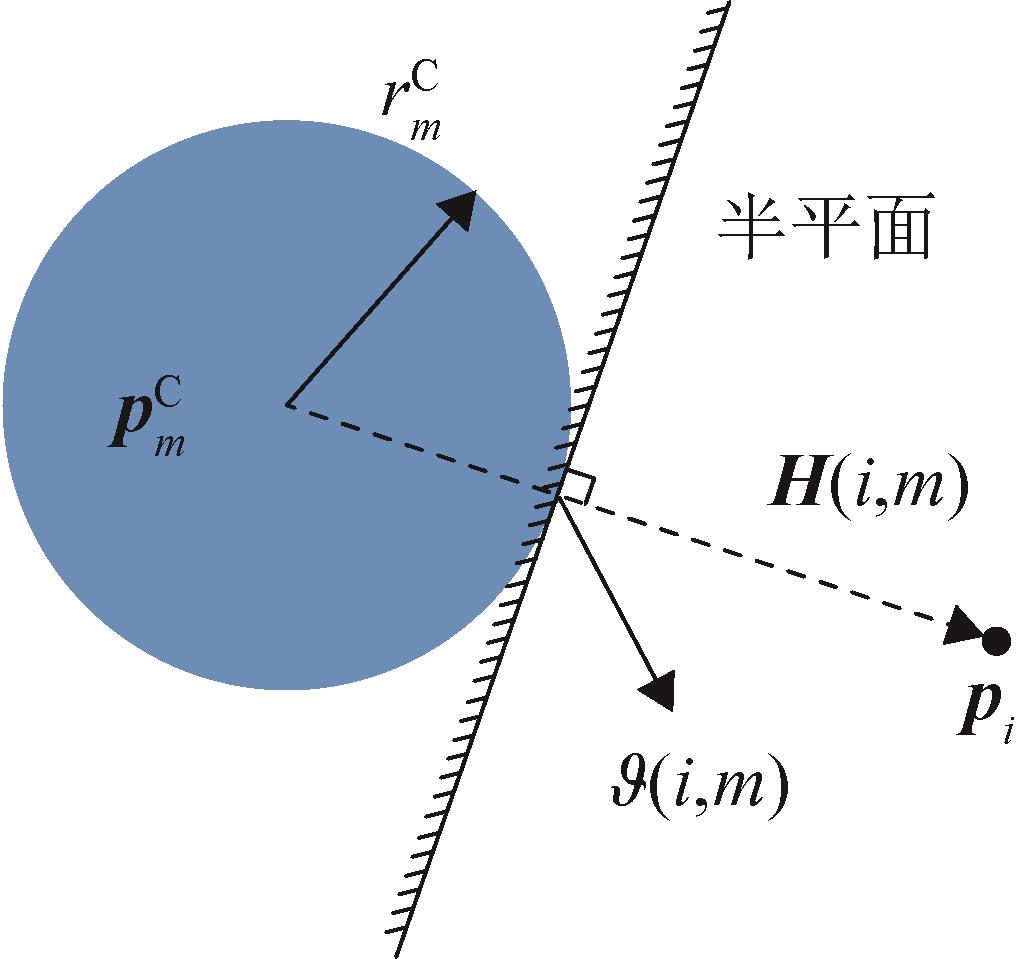
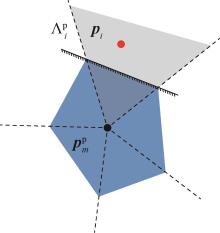
Fig. 3
Half plane decided by prismatic obstacle
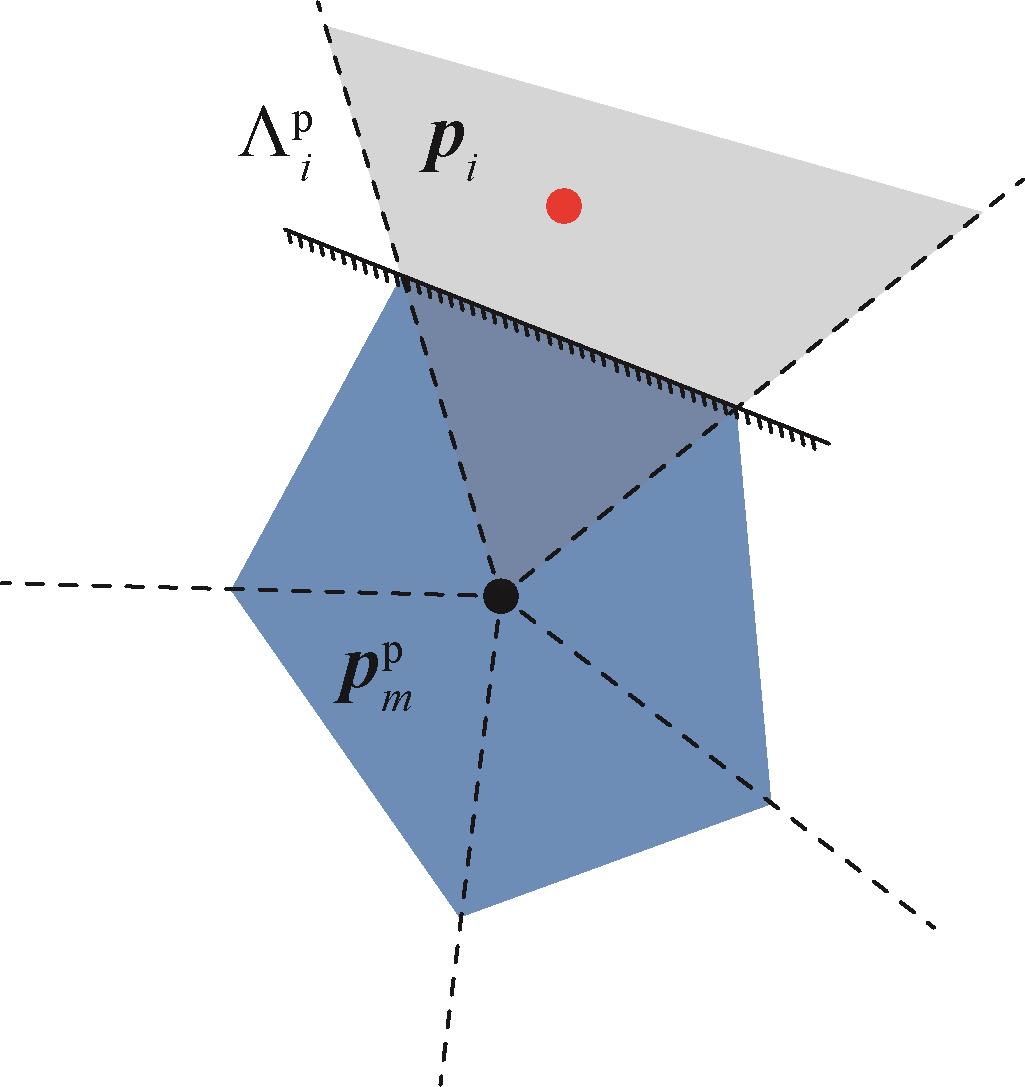
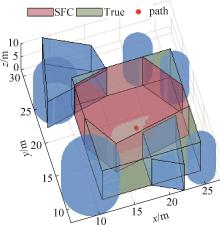
Fig. 4
Pologon safe region according to a waypoint
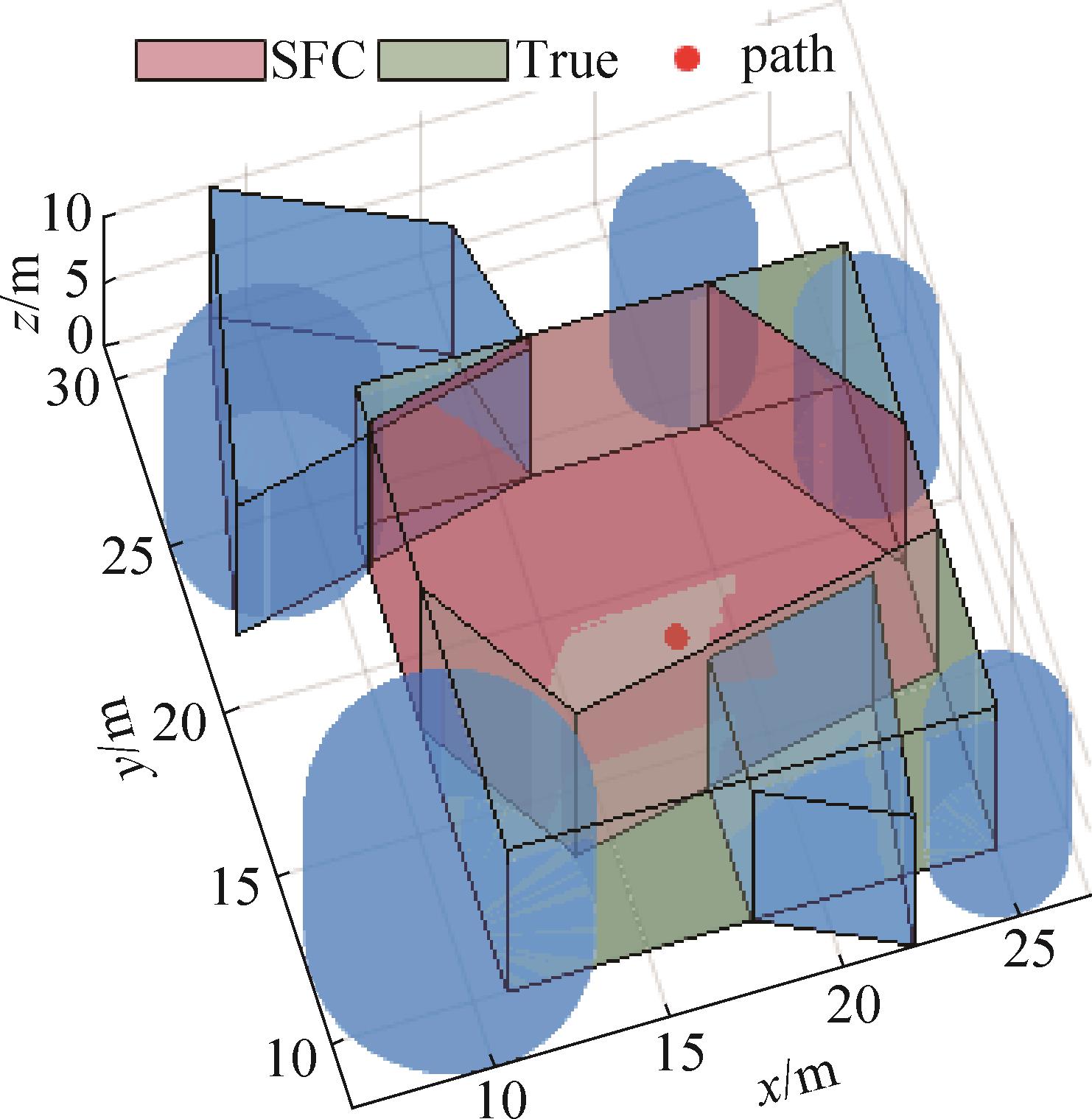
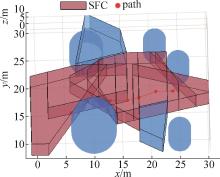
Fig. 5
SFC decided by obstacle-avoidance path
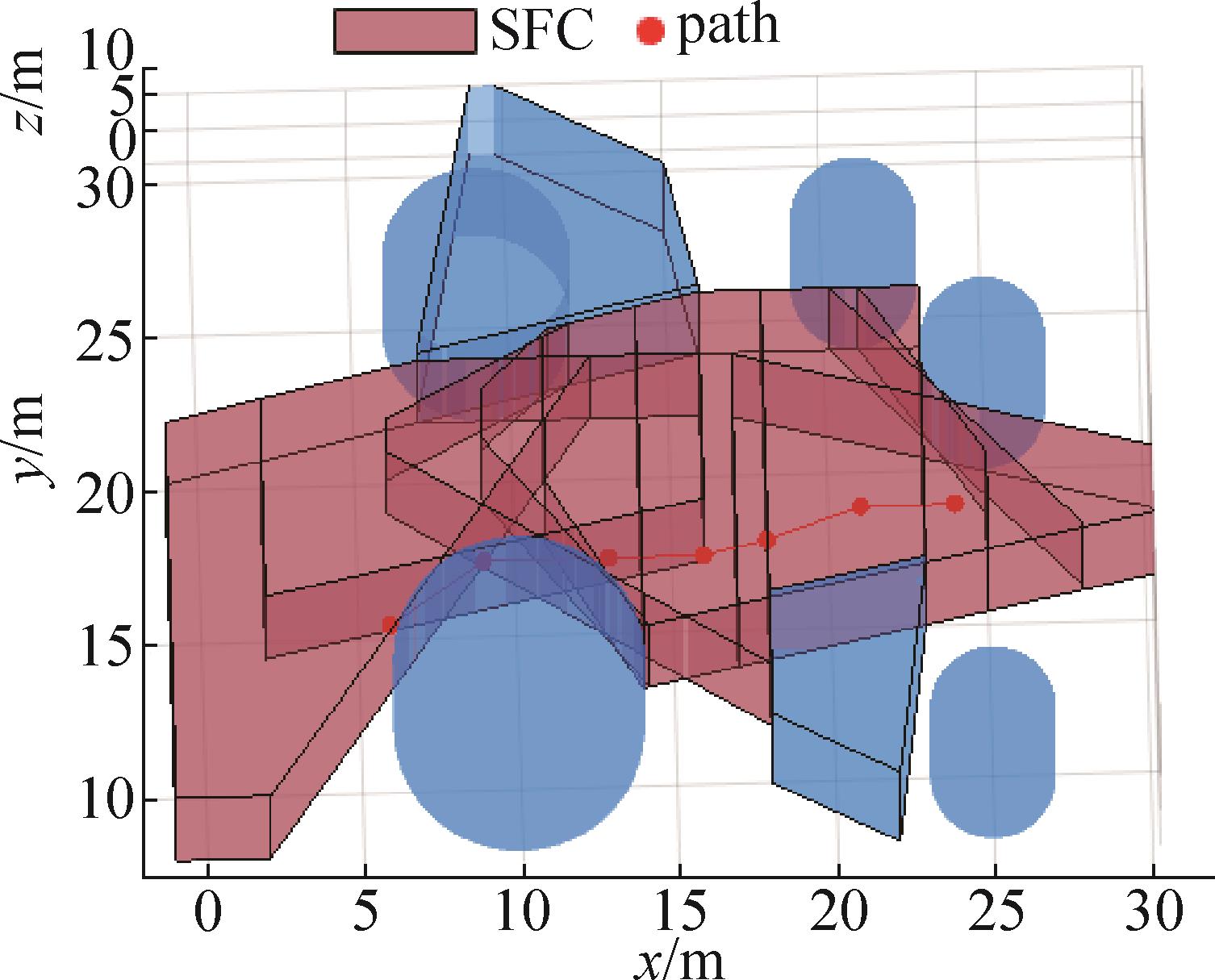
Fig. 6
Corridor constraint on discrete trajectory point(l=7)
Table 1
Simulation experimental parameters
| 参数名称 | 量值 |
|---|---|
| 初始状态/m | s0=[5,9,1,0,0,0] |
| 终端状态/m | sf=[87,92,8,0,0,0] |
| 状态量边界/m | smax=[+∞,+∞,+∞,20,20,20] smin=[-∞,-∞,-∞,-20,-20,-20] |
| 控制量边界/(m/s2) | umax=[10,10,10] umin=[-10,-10,-10] |
| 栅格分辨率/m | step=3 |
| 路径点间离散数 | l=7 |
| 走廊信赖域/m | η=5 |
| 轨迹点信赖域/m | Tr =[10,10,10] |
| 迭代误差/m | ε=0.01 |
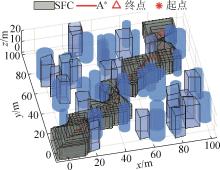
Fig. 7
SFC of scenario 1
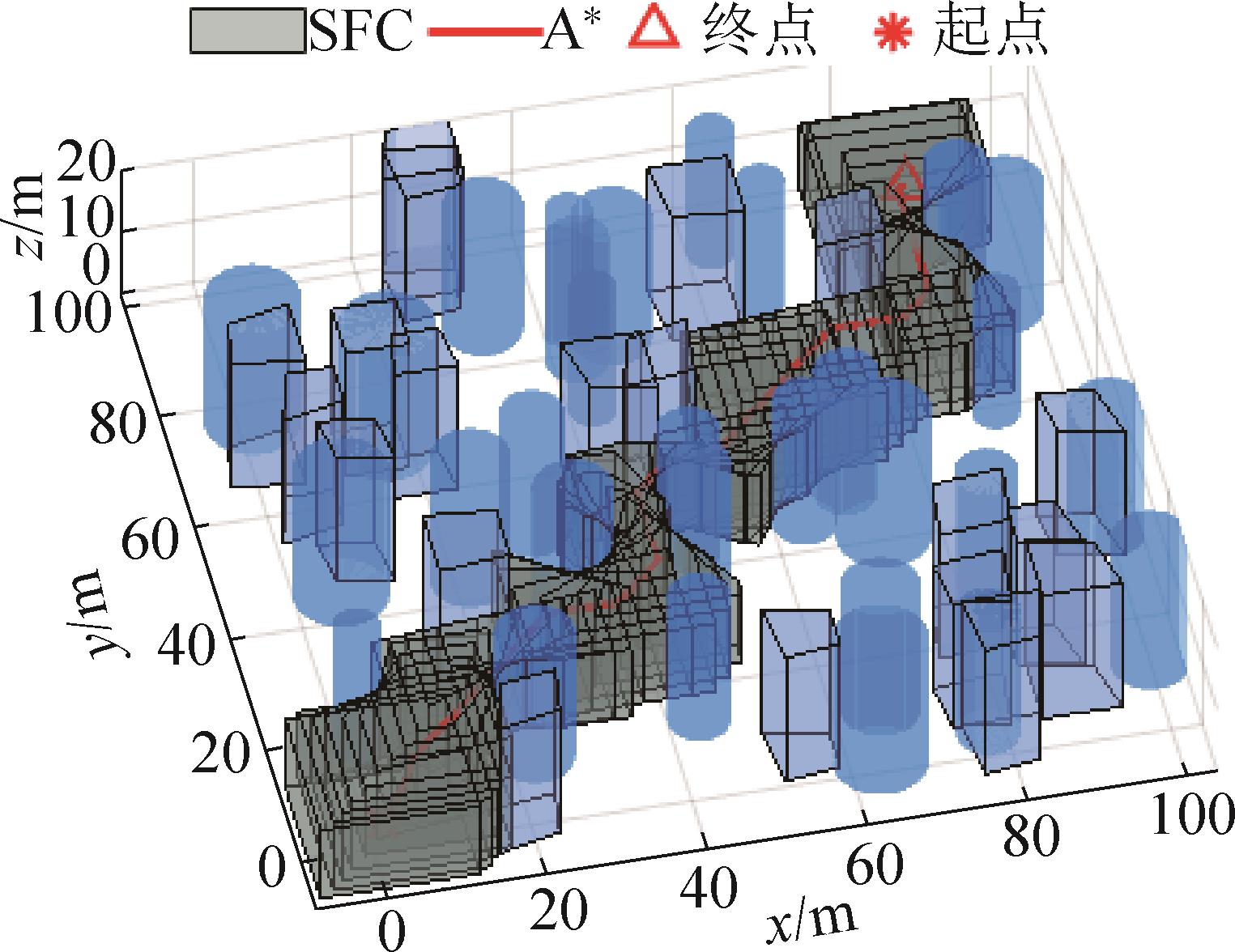

Fig. 8
Trajectory planning results of scenario 1 in 2D
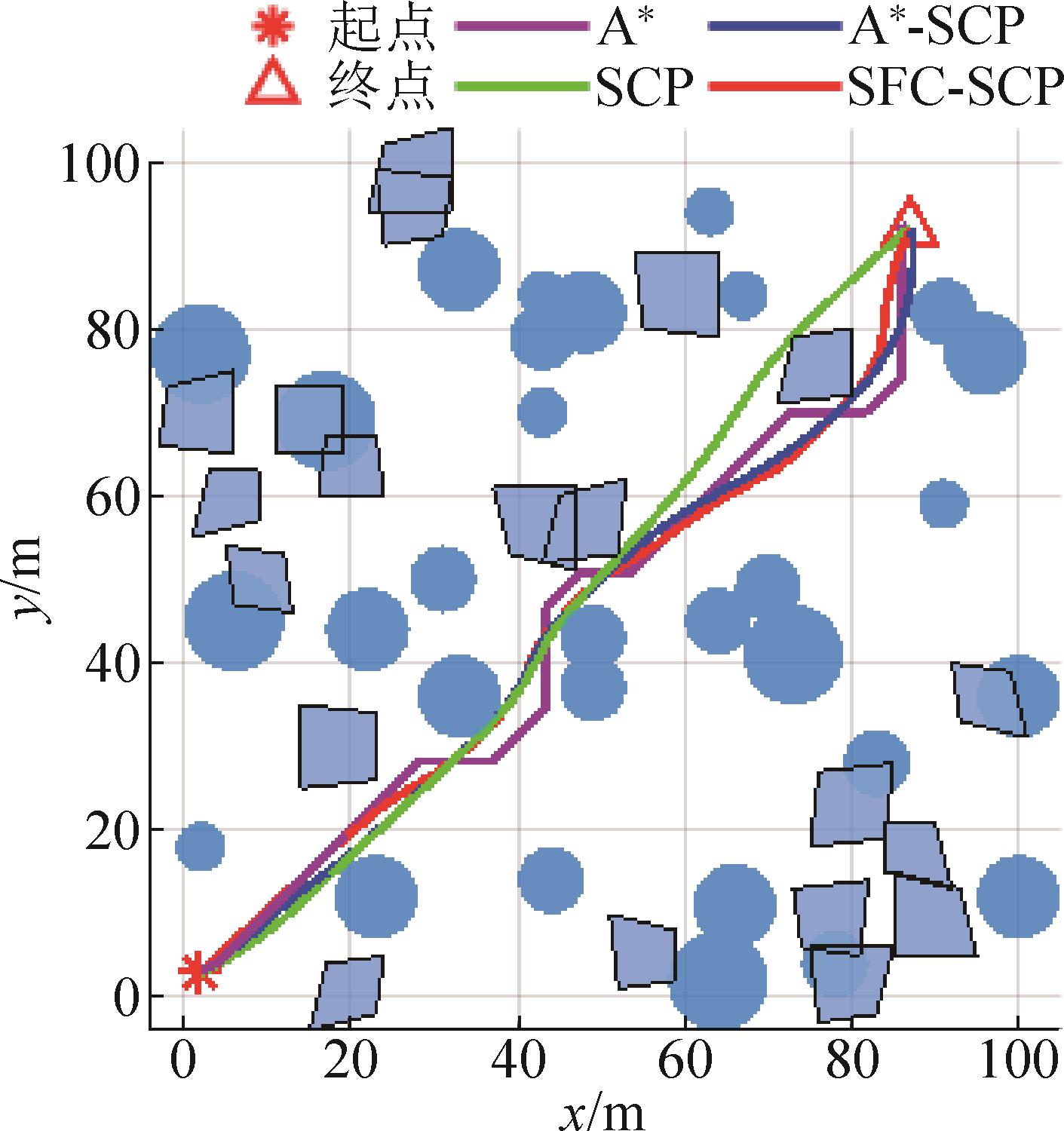
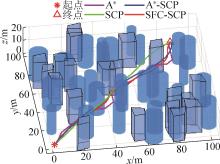
Fig. 9
Trajectory planning results of scenario 1 in 3D
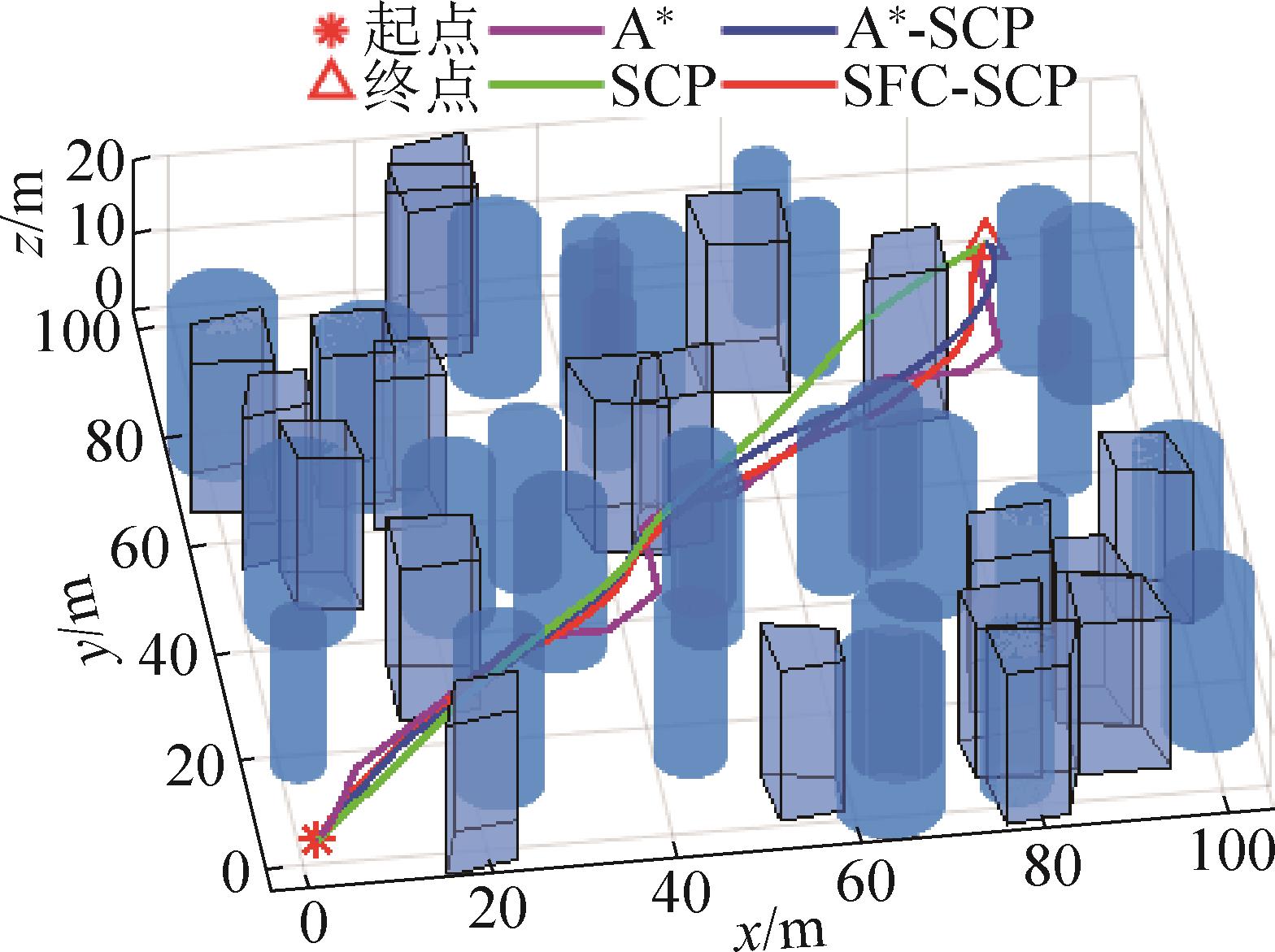
Table 2
Trajectory planning results of scenario 1
| 算法 | 飞行时间/s | 算法耗时/ms |
|---|---|---|
| SCP | 10.59 | 116 |
| A*-SCP | 11.33 | 86 |
| SFC-SCP | 11.38 | 59 |
Fig. 10
SFC of scenario 2
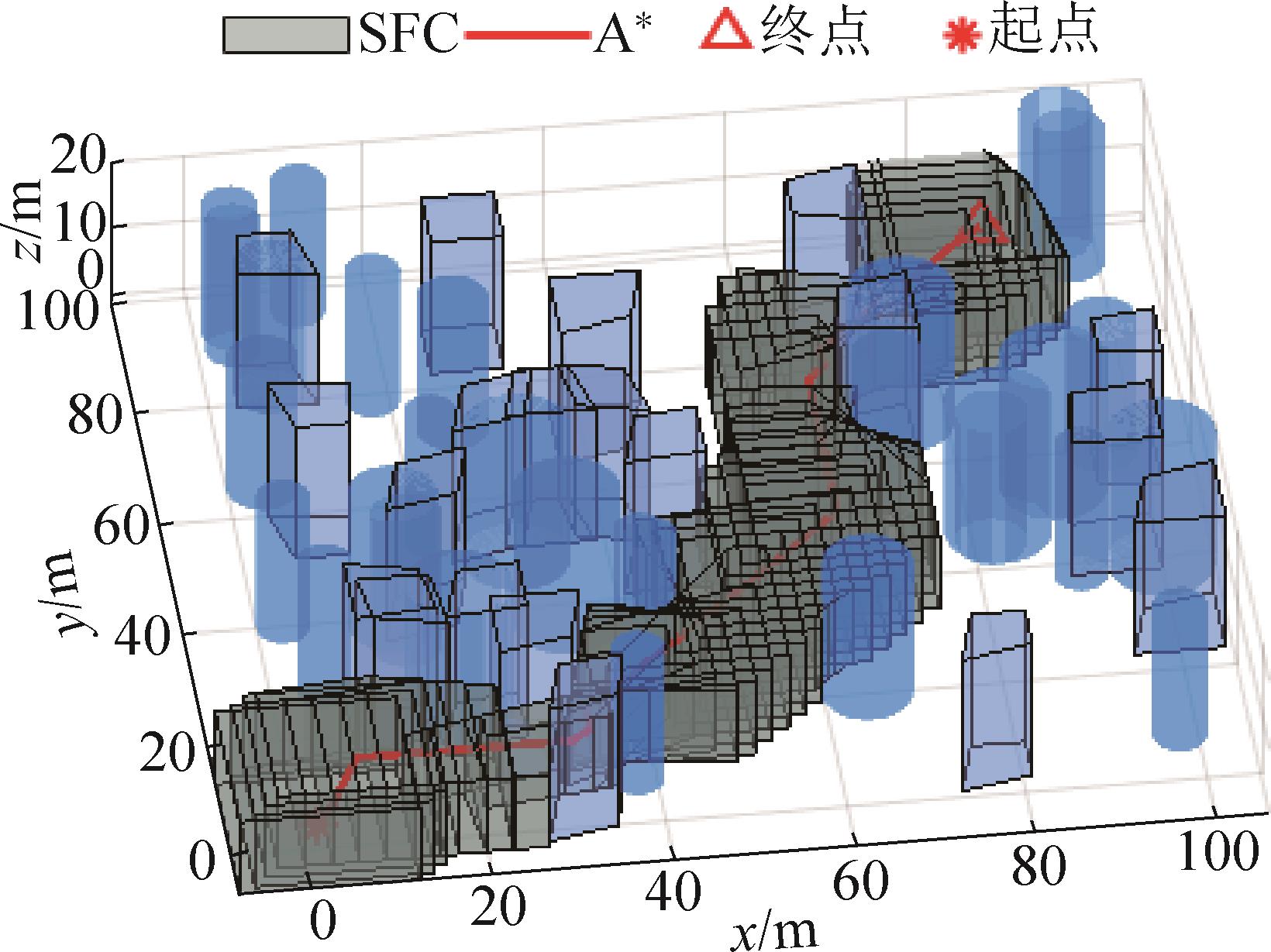

Fig. 11
Trajectory planning results of scenario 2 in 3D
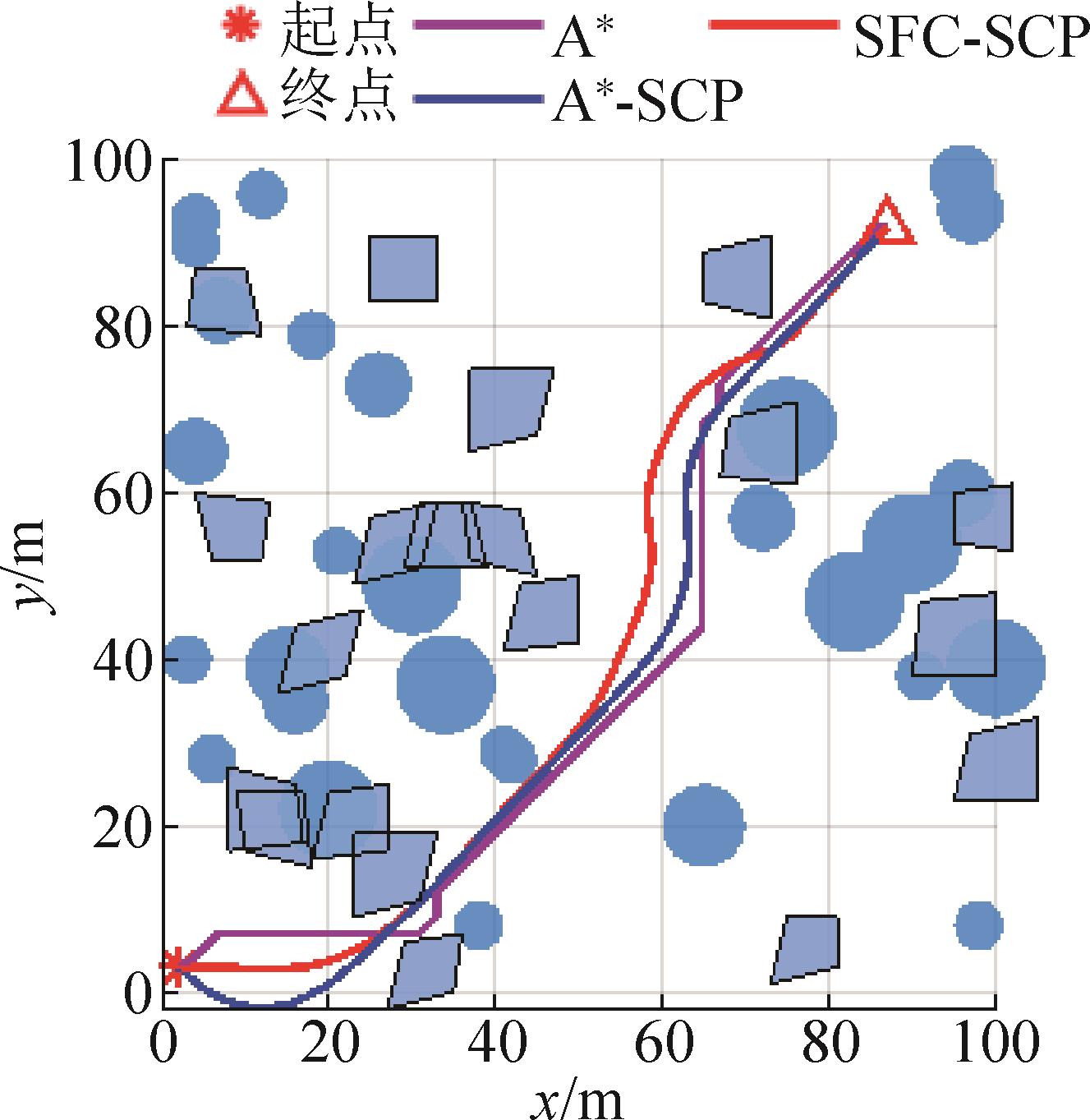
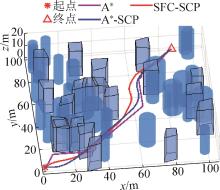
Fig. 12
Trajectory planning results of scenario 2 in 3D
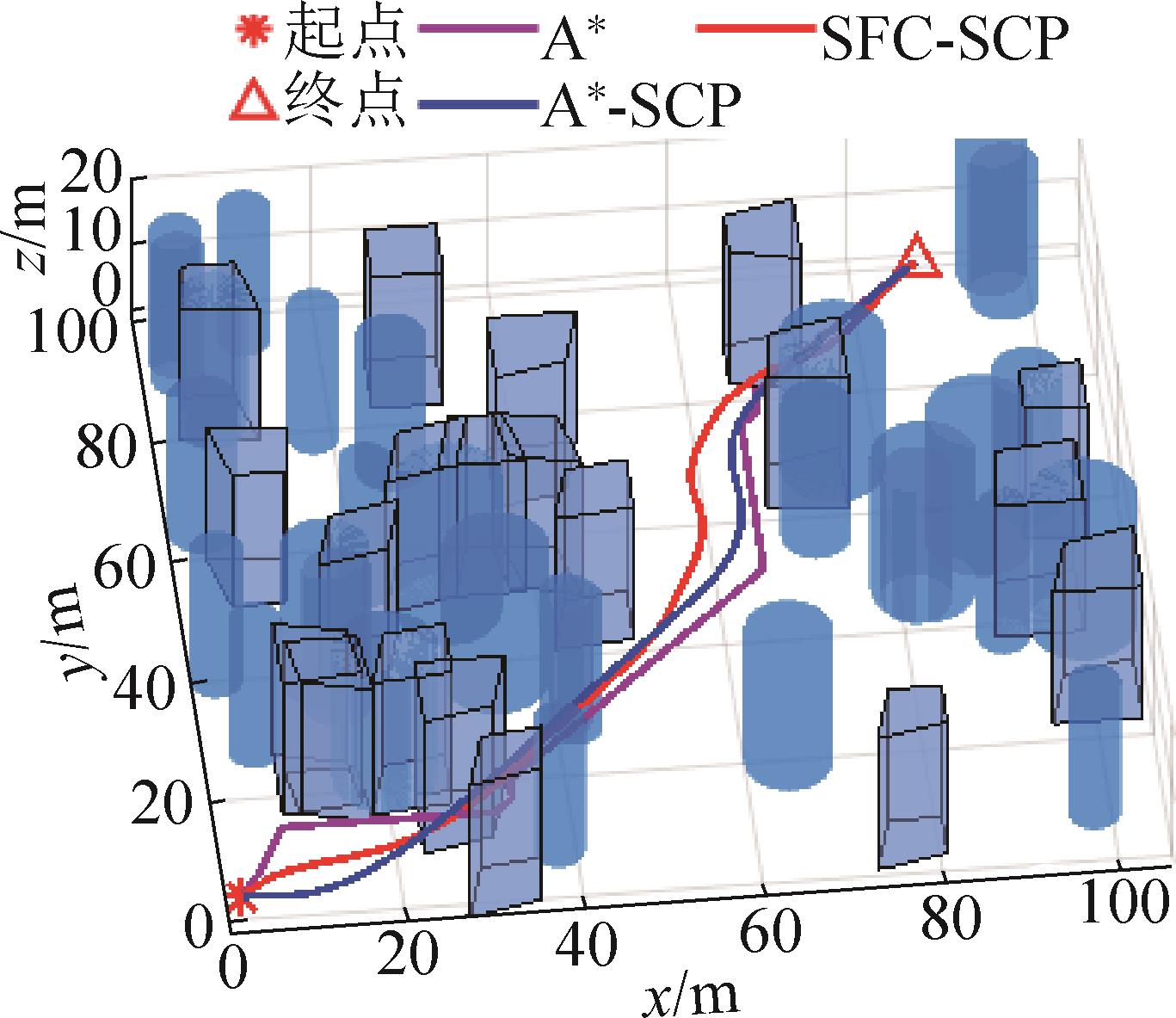
Table 3
Trajectory planning results of scenario 2
| 算法 | 飞行时间/s | 算法耗时/ms |
|---|---|---|
| SCP | NAN | NAN |
| A*-SCP | 12.07 | 170 |
| SFC-SCP | 13.27 | 54 |
Fig. 13
Comparison of flight time for 100 random scenarios
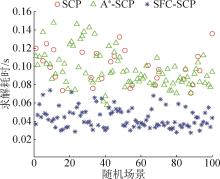
Fig. 14
Comparison of planning time for 100 random scenarios
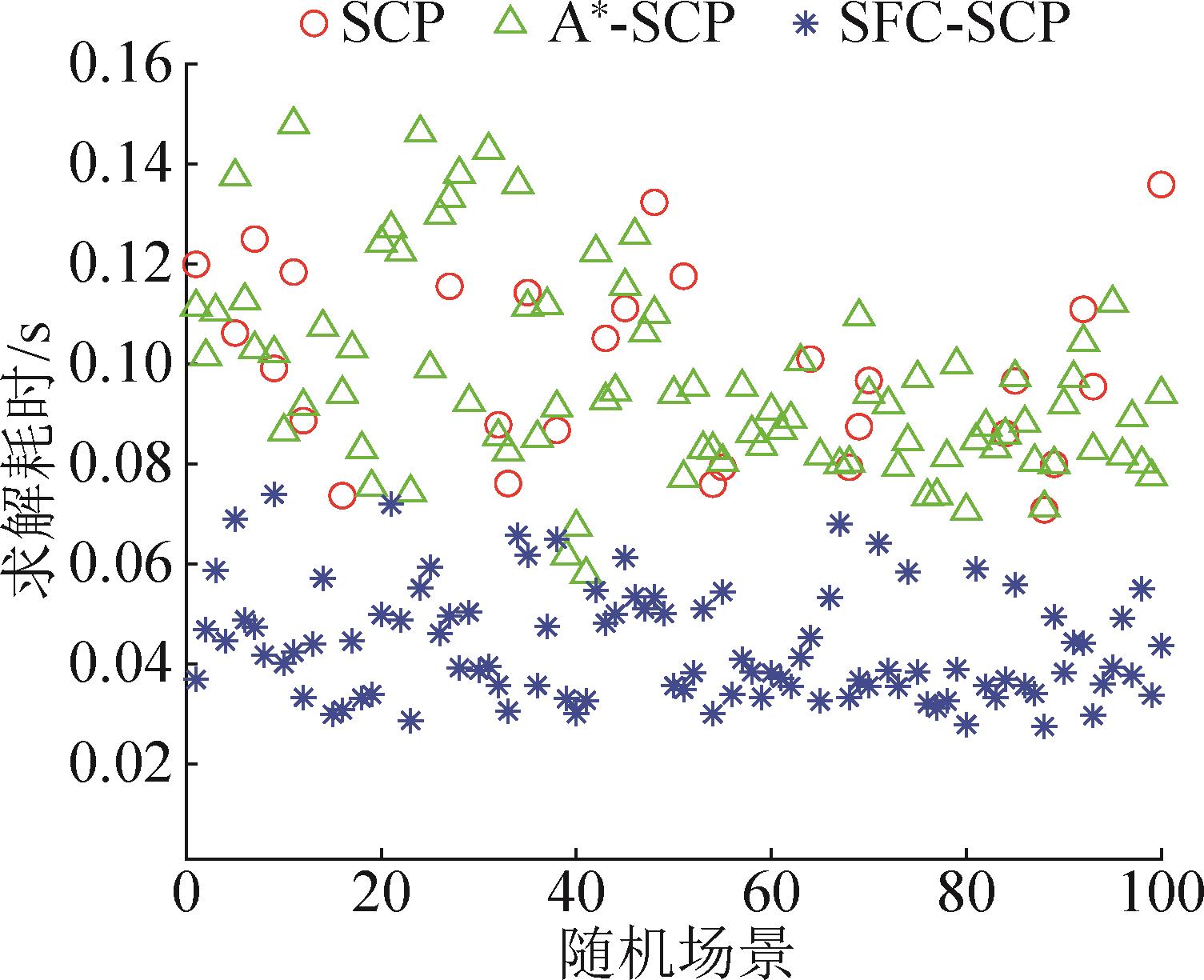
Table 4
Trajectory planning results for 100 random scenarios
| 算法 | 成功率/% | 平均飞行时间/s | 平均求解耗时/ms |
|---|---|---|---|
| SCP | 29 | 10.79 | 99.1 |
| A*-SCP | 89 | 11.81 | 96.3 |
| SFC-SCP | 100 | 11.93 | 43.6 |
| 1 | Han Sangchul, Chon Sanguk, Kim JungYeong, et al. Snake Robot Gripper Module for Search and Rescue in Narrow Spaces[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1667-1673. |
| 2 | Saeed Hamood Alsamhi, Shvetsov Alexey V, Kumar Santosh, et al. UAV Computing-assisted Search and Rescue Mission Framework for Disaster and Harsh Environment Mitigation[J]. Drones, 2022, 6(7): 154. |
| 3 | Rossini Micol, Biagio Di Mauro, Garzonio Roberto, et al. Rapid Melting Dynamics of an Alpine Glacier with Repeated UAV Photogrammetry[J]. Geomorphology, 2018, 304: 159-172. |
| 4 | Kim Hongjun, Kook Kim Byung. Energy-optimal Transport Trajectory Planning and Online Trajectory Modification for Holonomic Robots[J]. Asian Journal of Control, 2021, 23(5): 2185-2200. |
| 5 | Foehn Philipp, Romero Angel, Scaramuzza Davide. Time-optimal Planning for Quadrotor Waypoint Flight[J]. Science Robotics, 2021, 6(56): eabh1221. |
| 6 | Yu Xiang, Zhou Xiaobin, Guo Kexin, et al. Safety Flight Control for a Quadrotor UAV Using Differential Flatness and Dual-loop Observers[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 13326-13336. |
| 7 | Tordesillas J, Lopez B T, Everett M, et al. FASTER: Fast and Safe Trajectory Planner for Navigation in Unknown Environments[J]. IEEE Transactions on Robotics, 2022, 38(2): 922-938. |
| 8 | Yao Zhihong, Jiang Haoran, Cheng Yang, et al. Integrated Schedule and Trajectory Optimization for Connected Automated Vehicles in a Conflict Zone[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(3): 1841-1851. |
| 9 | Letizia Nunzio A, Salamat Babak, Tonello Andrea M. A Novel Recursive Smooth Trajectory Generation Method for Unmanned Vehicles[J]. IEEE Transactions on Robotics, 2021, 37(5): 1792-1805. |
| 10 | Gao Fei, Wu William, Gao Wenliang, et al. Flying on Point Clouds: Online Trajectory Generation and Autonomous Navigation for Quadrotors in Cluttered Environments[J]. Journal of Field Robotics, 2019, 36(4): 710-733. |
| 11 | Byrd R H, Jean Charles Gilbert, Nocedal J. A Trust Region Method Based on Interior Point Techniques for Nonlinear Programming[J]. Mathematical Programming, 2000, 89(1): 149-185. |
| 12 | 王祝, 刘莉, 龙腾, 等. 基于罚函数序列凸规划的多无人机轨迹规划[J]. 航空学报, 2016, 37(10): 3149-3158. |
| Wang Zhu, Liu Li, Long Teng, et al. Trajectory Planning for Multi-UAVs Using Penalty Sequential Convex Pro-gramming[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(10): 3149-3158. | |
| 13 | Misra G, Bai Xiaoli. Optimal Path Planning for Free-Flying Space Manipulators via Sequential Convex Programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(11): 3019-3026. |
| 14 | 刘延杰, 朱圣英, 崔平远. 序列凸优化的小天体附着轨迹优化[J]. 宇航学报, 2018, 39(2): 177-183. |
| Liu Yanjie, Zhu Shengying, Cui Pingyuan. Soft Landing Trajectory Optimization on Asteroids by Convex Programming[J]. Journal of Astronautics, 2018, 39(2): 177-183. | |
| 15 | Zhang Zhe, Li Jianxun, Wang Jun. Sequential Convex Programming for Nonlinear Optimal Control Problems in UAV Path Planning[J]. Aerospace Science and Technology, 2018, 76: 280-290. |
| 16 | Wang Zhu, Liu Li, Long Teng. Minimum-time Trajectory Planning for Multi-unmanned-aerial-vehicle Cooperation Using Sequential Convex Programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(11): 2976-2982. |
| 17 | Xu Guangtong, Long Teng, Wang Zhu, et al. Trust-region Filtered Sequential Convex Programming for multi-UAV Trajectory Planning and Collision Avoidance[J]. ISA Transactions, 2022, 128, Part B: 664-676. |
| 18 | Li Wenbo, Li Wentao, Cheng Lin, et al. Trajectory Optimization with Complex Obstacle Avoidance Constraints via Homotopy Network Sequential Convex Programming[J]. Aerospace, 2022, 9(11): 720. |
| 19 | Zhang Zhe, Jin Gumin, Li Jianxun. Penalty Boundary Sequential Convex Programming Algorithm for Non-convex Optimal Control Problems[J]. ISA Transactions, 2018, 72: 229-244. |
| 20 | Li Dongcheng, Yin Wangping, Wong W E, et al. Quality-oriented Hybrid Path Planning Based on A* and Q-learning for Unmanned Aerial Vehicle[J]. IEEE Access, 2022, 10: 7664-7674. |
| 21 | Shao Shikai, He Chenglong, Zhao Yuanjie, et al. Efficient Trajectory Planning for UAVs Using Hierarchical Optimization[J]. IEEE Access, 2021, 9: 60668-60681. |
| 22 | Qin Zhenquan, Zhang Xuan, Zhang Xinwei, et al. The UAV Trajectory Optimization for Data Collection from Time-constrained IoT Devices: A Hierarchical Deep Q-network Approach[J]. Applied Sciences, 2022, 12(5): 2546. |
| 23 | Deits R, Tedrake R. Computing Large Convex Regions of Obstacle-free Space Through Semidefinite Programming[M]//H Levent Akin, Amato N M, Isler V, et al. Algorithmic Foundations of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic Foundations of Robotics. Cham: Springer International Publishing, 2015: 109-124. |
| 24 | Gao Fei, Wang Luqi, Zhou Boyu, et al. Teach-repeat-replan: A Complete and Robust System for Aggressive Flight in Complex Environments[J]. IEEE Transactions on Robotics, 2020, 36(5): 1526-1545. |
| 25 | Park Jungwon, Kim Dabin, Chan Kim Gyeong, et al. Online Distributed Trajectory Planning for Quadrotor Swarm with Feasibility Guarantee Using Linear Safe Corridor[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4869-4876. |
| 26 | Liu Sikang, Watterson M, Mohta K, et al. Planning Dynamically Feasible Trajectories for Quadrotors Using Safe Flight Corridors in 3-D Complex Environments[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1688-1695. |
| 27 | Betts J T. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming[M]. 2nd ed. Philadelphia: Society for Industrial and Applied Mathematics, 2010: 279-282. |
| 28 | 徐广通, 王祝, 曹严, 等. 动态优先级解耦的无人机集群轨迹分布式序列凸规划[J]. 航空学报, 2022, 43(2): 415-426. |
| Xu Guangtong, Wang Zhu, Cao Yan, et al. Dynamic-priority-decoupled UAV Swarm Trajectory Planning Using Distributed Sequential Convex Programming[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 415-426. | |
| 29 | 王祝, 徐广通, 龙腾. 基于定制内点法的多无人机协同轨迹规划[J]. 自动化学报, 2023, 49(11): 2374-2385. |
| Wang Zhu, Xu Guangtong, Long Teng. Customized Interior-point Method for Cooperative Trajectory Planning of Multiple Unmanned Aerial Vehicles[J]. Acta Automatica Sinica, 2023, 49(11): 2374-2385. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [3] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| [4] | Hu Shijun, Liu Hailiang, Wang Binglei, Su Wenke. Quadrotor UAV Path Planning Based on Rapidly-exploration Directional Tree Algorithm [J]. Journal of System Simulation, 2025, 37(2): 311-324. |
| [5] | Li Boning, Chen Ming, Qi Shuchang, Meng Haoran, Wang Lei. Attitude Control of Quadrotor UAV Based on Disturbance Observer and Command Filtering [J]. Journal of System Simulation, 2025, 37(11): 2793-2803. |
| [6] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| [7] | Guangjian Tian, Jiyang Dai, Jin Ying, Ning Wang. Multi-UAV Trajectory Planning Based on Adaptive Segmented Potential Field Method [J]. Journal of System Simulation, 2022, 34(11): 2368-2376. |
| [8] | Fuzhen Zhang, Yaoqin Zhu. Task Allocation Method for Multi-UAV Cooperative Reconnaissance in Complex Environment [J]. Journal of System Simulation, 2022, 34(10): 2293-2302. |
| [9] | Zhao Jing, Wang Peng, Ding Xiaoqian, Jiang Guoping, Xu Fengyu, Sun Yanfei. Fault Tolerant Control and Simulation of Quadrotor Based on Adaptive Observer [J]. Journal of System Simulation, 2022, 34(1): 1-10. |
| [10] | Zeng Sijie, Yan Liang, Duan Xiaojun. Planning and Analysis on UAV Trajectory Based on PCE Method [J]. Journal of System Simulation, 2022, 34(1): 145-152. |
| [11] | Duan Xianyin, Zhang Can, Zhu Zerun, Sun Zhaoyang, Jiang Guozhang, Xiang Feng. Trajectory Planning of 6-DOF Manipulator Based on Inverse Multi-objective Optimization [J]. Journal of System Simulation, 2021, 33(9): 2128-2137. |
| [12] | Jiang Zerui, Yang Lijun, Li Jun, Jiao Xiaolong, Zheng Hang. Kinematics Analysis and Simulation of Automatically Tracking Dental Surgery Lamp [J]. Journal of System Simulation, 2021, 33(12): 2864-2879. |
| [13] | Ye Shuai, Jiang Guoping, Zhou Yingjiang, Liu Shang. Fixed-time Event-triggered Formation Control for Multiple UAVs [J]. Journal of System Simulation, 2021, 33(10): 2420-2431. |
| [14] | Xiu Supu, Wen Yuanqiao, Xiao Changshi, Yuan Haiwen, Zhan Wenqiang. Design and Simulation on Autonomous Landing of a Quad Tilt Rotor [J]. Journal of System Simulation, 2020, 32(9): 1676-1685. |
| [15] | Zhou Nan, Wang Liang, Ai Jianliang. Modeling and Simulation of Quadrotor UAV with Vector Thrust Based on Backstepping [J]. Journal of System Simulation, 2020, 32(6): 1117-1125. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
