

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (8): 1692-1704.doi: 10.16182/j.issn1004731x.joss.22-0487
•
Junqiang Lin1( ), Hongjun Wang1(), Xiangjun Zou1,2, Po Zhang1, Chengen Li1, Yipeng Zhou3, Shujie Yao1
), Hongjun Wang1(), Xiangjun Zou1,2, Po Zhang1, Chengen Li1, Yipeng Zhou3, Shujie Yao1
Received:2022-05-12
Revised:2022-07-11
Online:2023-08-25
Published:2023-08-15
Junqiang Lin, Hongjun Wang, Xiangjun Zou, Po Zhang, Chengen Li, Yipeng Zhou, Shujie Yao. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO[J]. Journal of System Simulation, 2023, 35(8): 1692-1704.

Fig. 1
System overall architecture
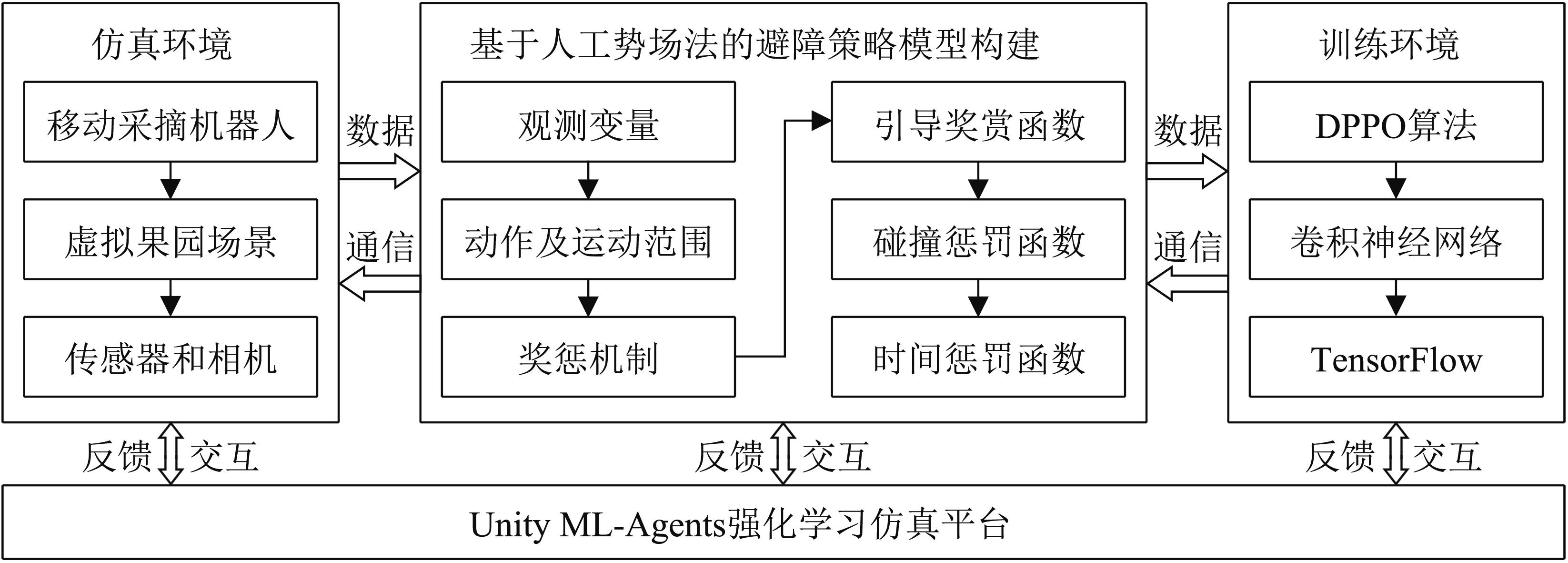
Table 1
List of state space sets
| 观测变量 | 符号 | 状态描述 |
|---|---|---|
| 位置变量 | 机器人空间位置 | |
| 障碍物空间位置 | ||
| 果树空间位置 | ||
| 机器人变量 | 线速度 | |
| 角速度 | ||
| 移动时间 | ||
| 距离变量 | 机器人与障碍物的距离 | |
| 机器人与目标点的距离 |
Table 2
Action space collection list
| 控制方式 | 符号 | 动作描述 | 取值范围 |
|---|---|---|---|
| 前进控制 | 加速 静止 | [0, 1] | |
| 转向控制 | 左转 直行 右转 | [ 1, 1] |
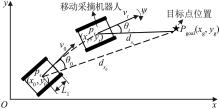
Fig. 2
Move picking robot kinematic model
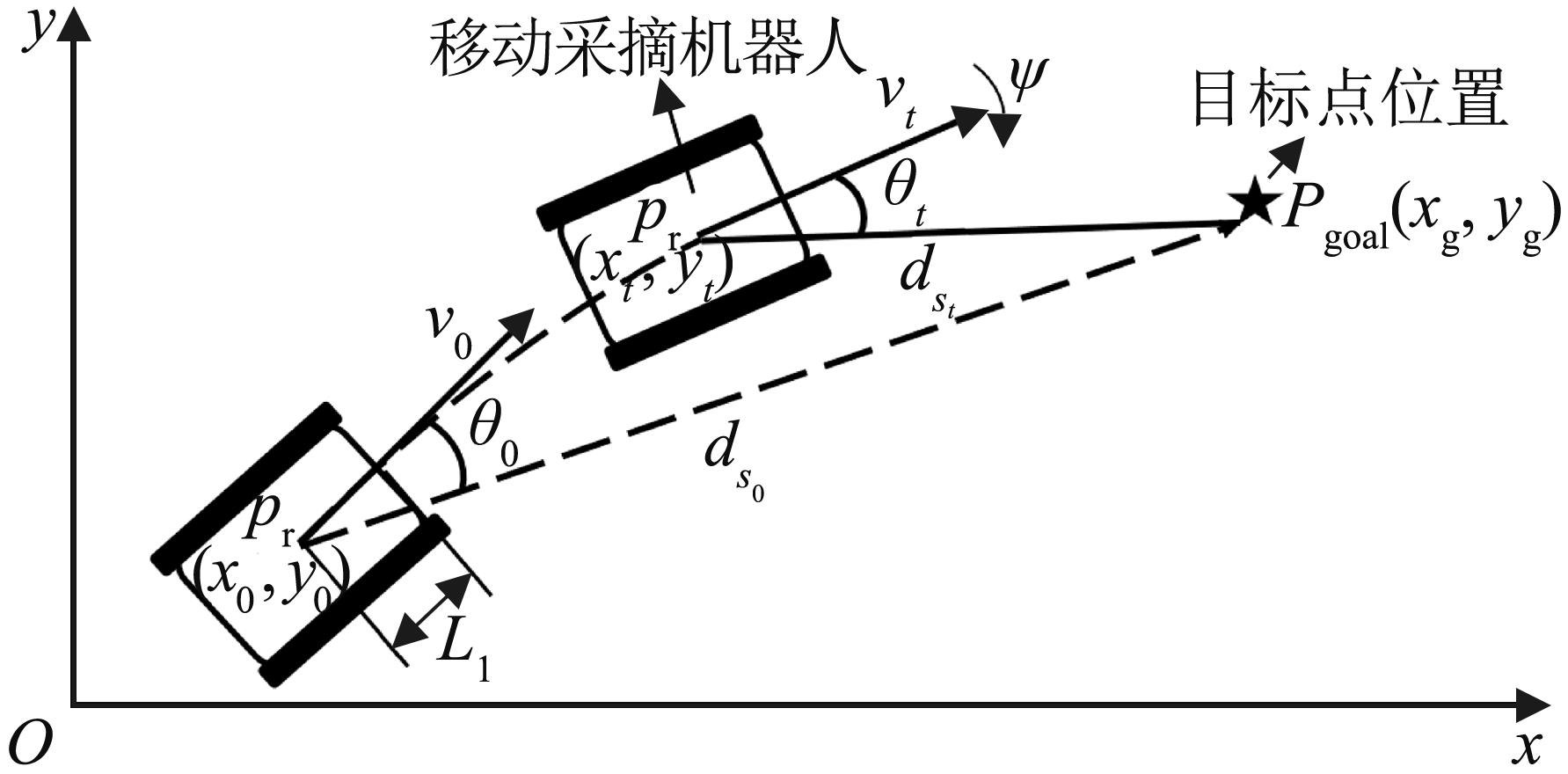
Fig. 3
Limitations of artificial potential field method
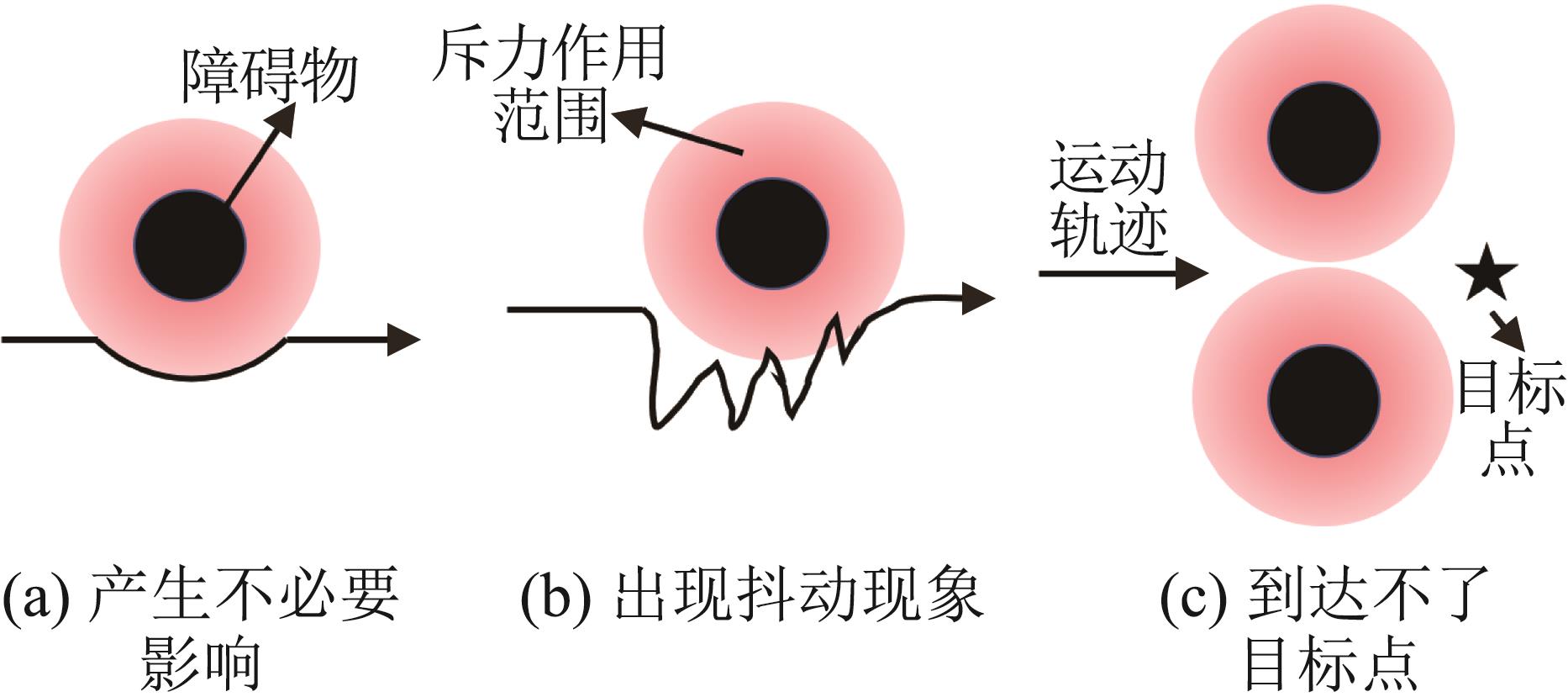

Fig. 4
Motion collision detection of mobile picking robot
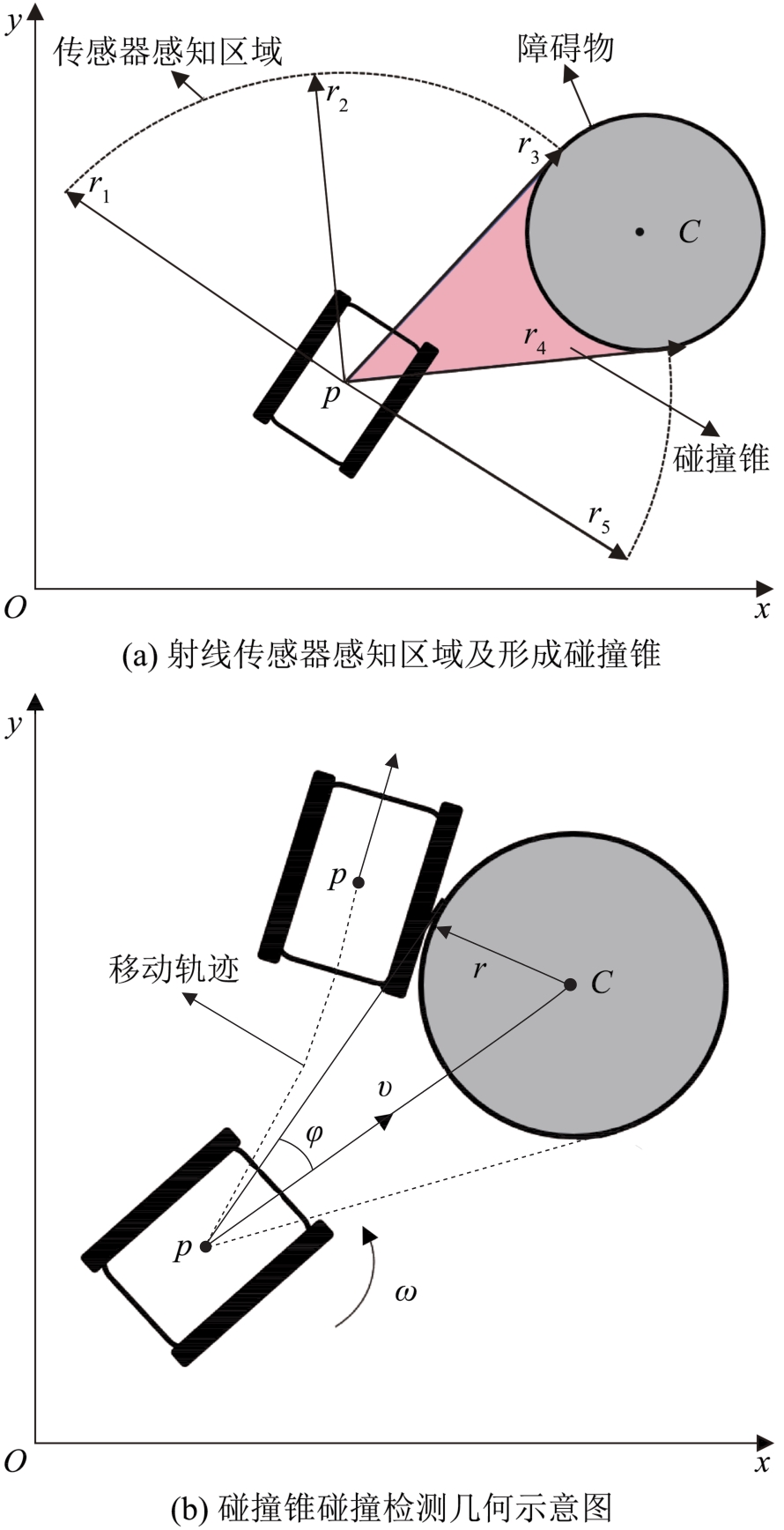

Fig. 5
DPPO algorithm network training process
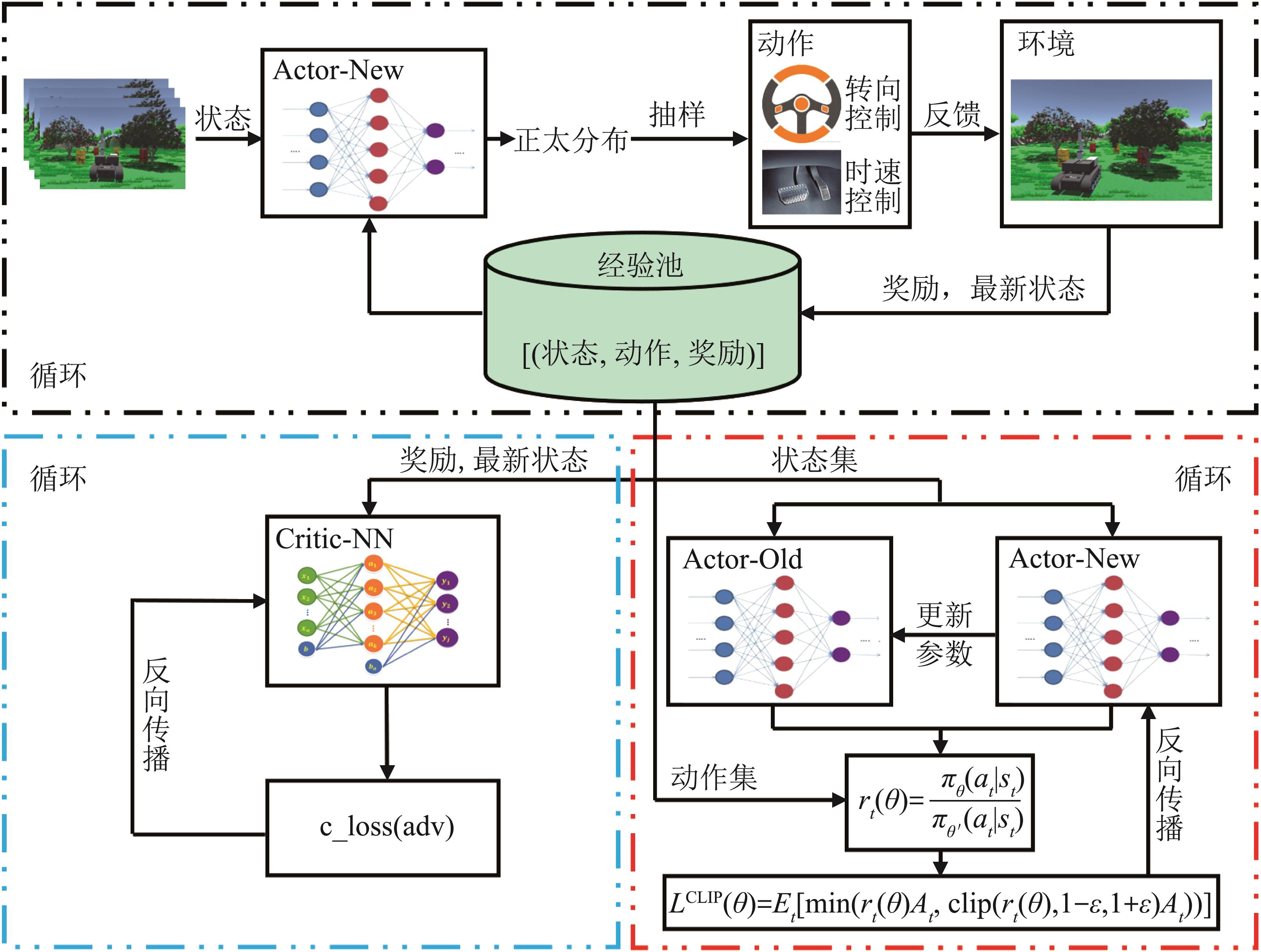
Table 3
Training parameter settings
| 参数名称 | 参数值设置 |
|---|---|
| batch size buffer_size learning_rate beta β epsilon ε lambda λ gamma γ num_epoch num_layers hidden_units max_steps | 2 048 10 240 3×10-4 5×10-3 0.2 0.95 0.99 3 2 256 5×105 |
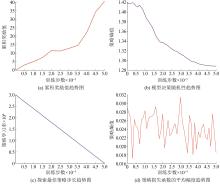
Fig. 6
Deep reinforcement learning training results
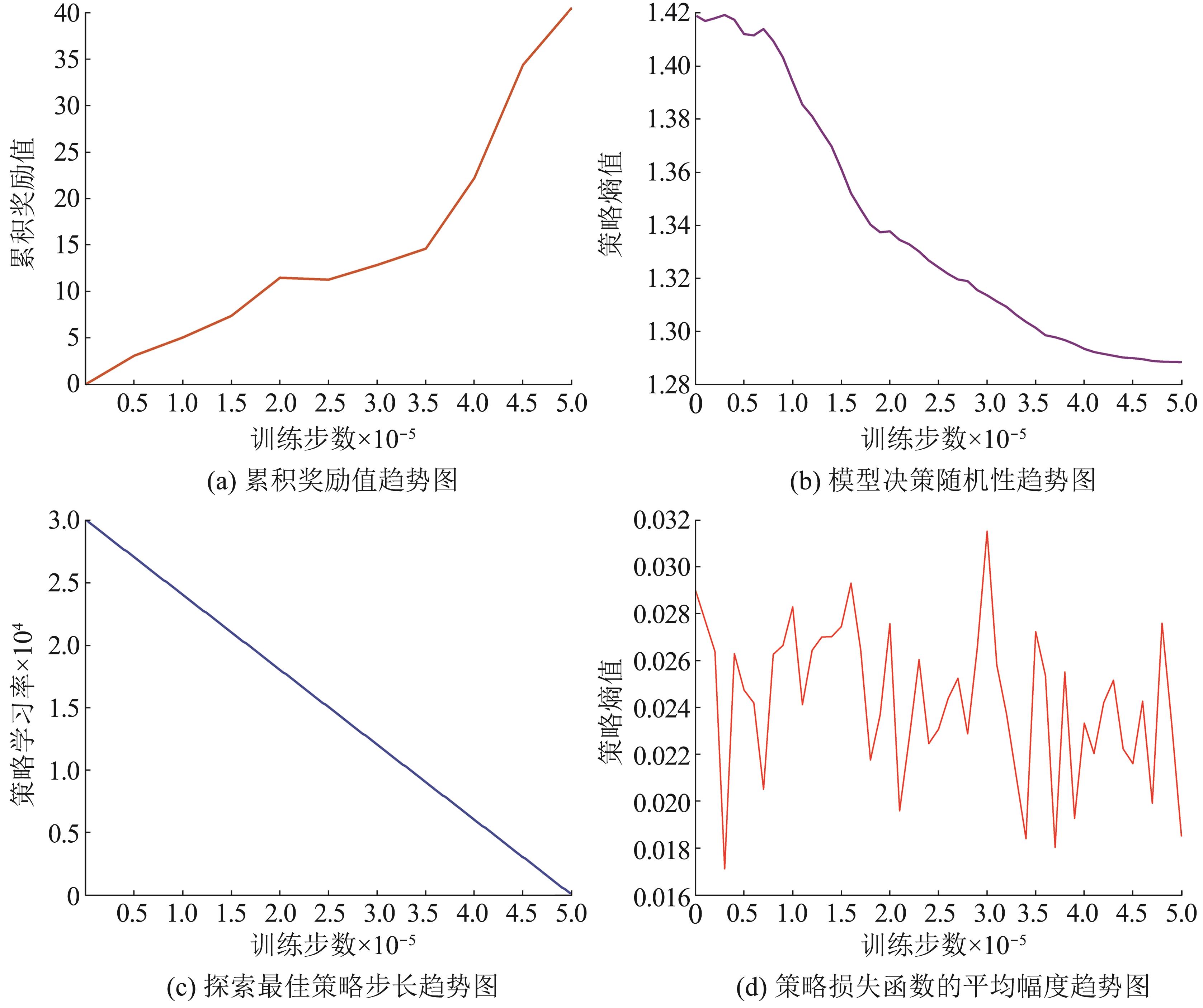

Fig. 7
Simulation environment for different types of obstacles
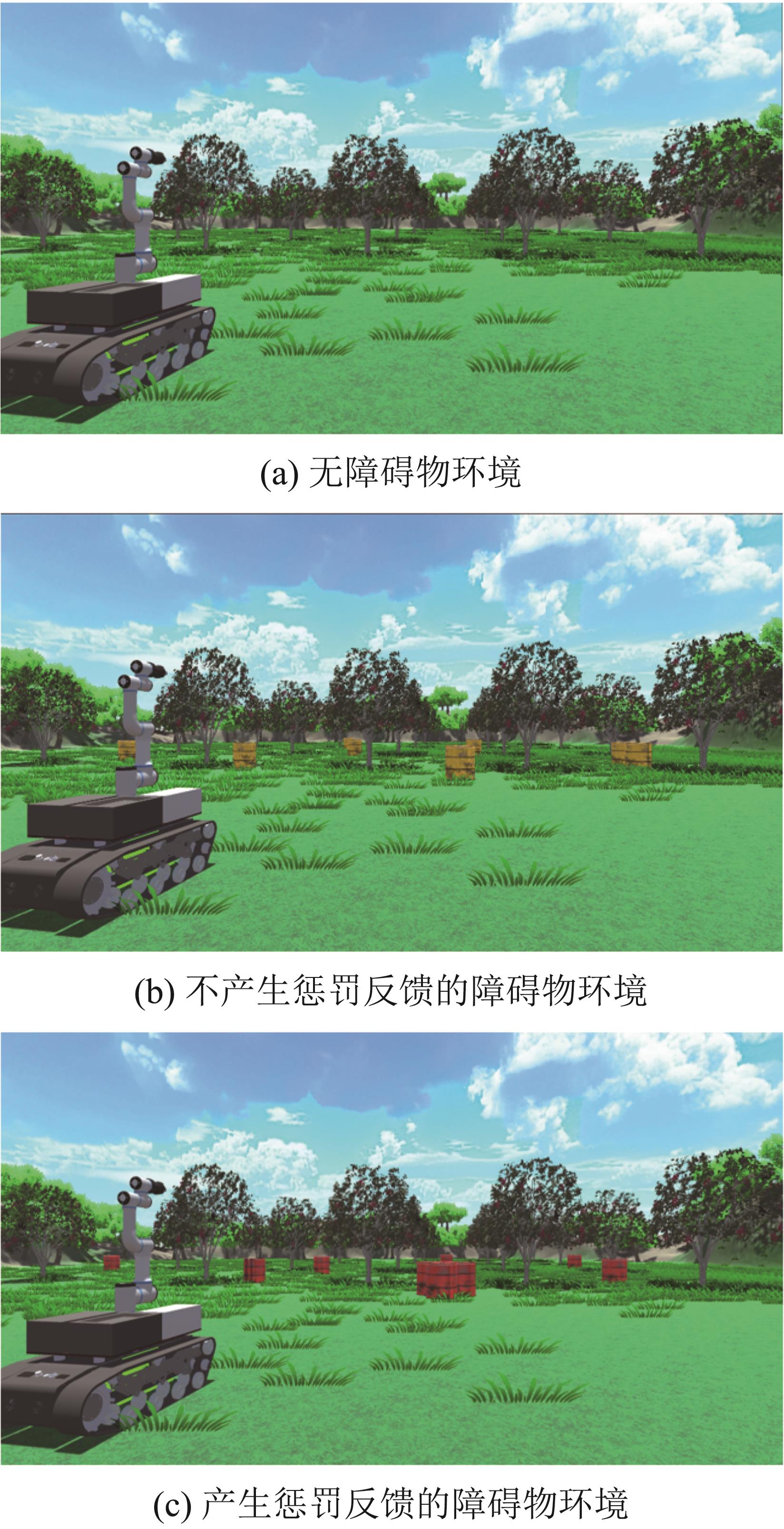
Table 4
Experiment of different types of obstacles affecting success rate of mobile obstacle avoidance
| 障碍物 类型 | 成功数 (实验数) | 平均 时间/s | 最大 转向角/(°) | 成功率/% |
|---|---|---|---|---|
| 无障碍物 | 85(90) | 10.13 | 41.15 | 94.4 |
| 无惩罚反馈 | 83(90) | 11.57 | 56.23 | 92.2 |
| 有惩罚反馈 | 86(90) | 9.54 | 32.82 | 95.6 |
Fig. 8
Trend of cumulative reward value for different reward and punishment mechanisms
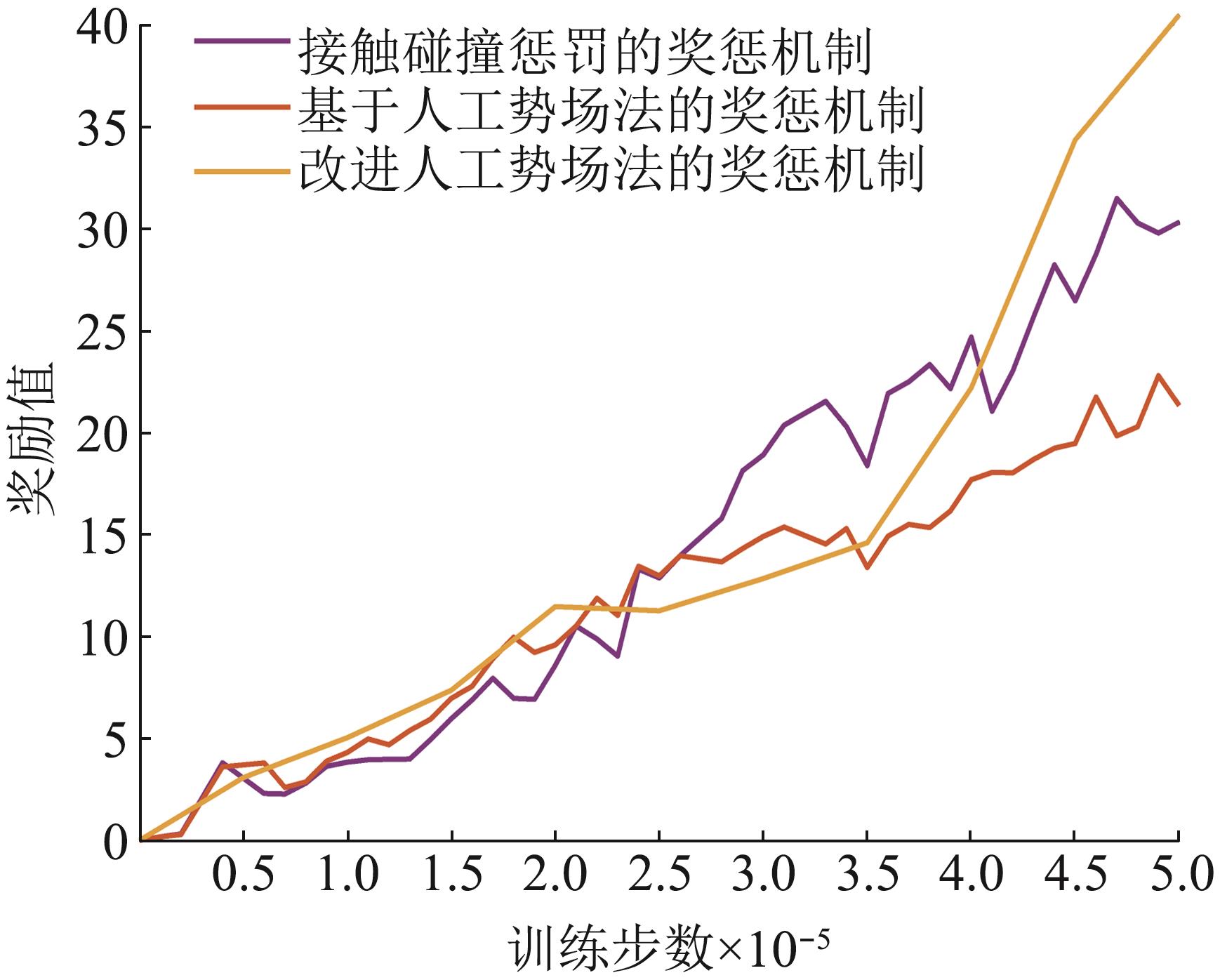
Table 5
Experiment of different reward and punishment mechanisms affecting autonomous obstacle avoidance performance of mobile picking robot
| 奖惩机制类型 | 实验数 | 成功数 | 移动采摘机器人每次完成任务所使用时间/s | 成功率/% | |||
|---|---|---|---|---|---|---|---|
| 最小值 | 平均值 | 最大值 | 标准差 | ||||
| 接触碰撞惩罚 | 120 | 104 | 9.41 | 9.66 | 10.17 | 0.41 | 86.7 |
| 基于人工势场法 | 120 | 111 | 10.03 | 10.48 | 11.23 | 0.67 | 92.5 |
| 改进人工势场法 | 120 | 117 | 8.96 | 9.15 | 9.47 | 0.25 | 97.5 |
Fig. 9
Results of autonomous obstacle avoidance path planning under different types of obstacles
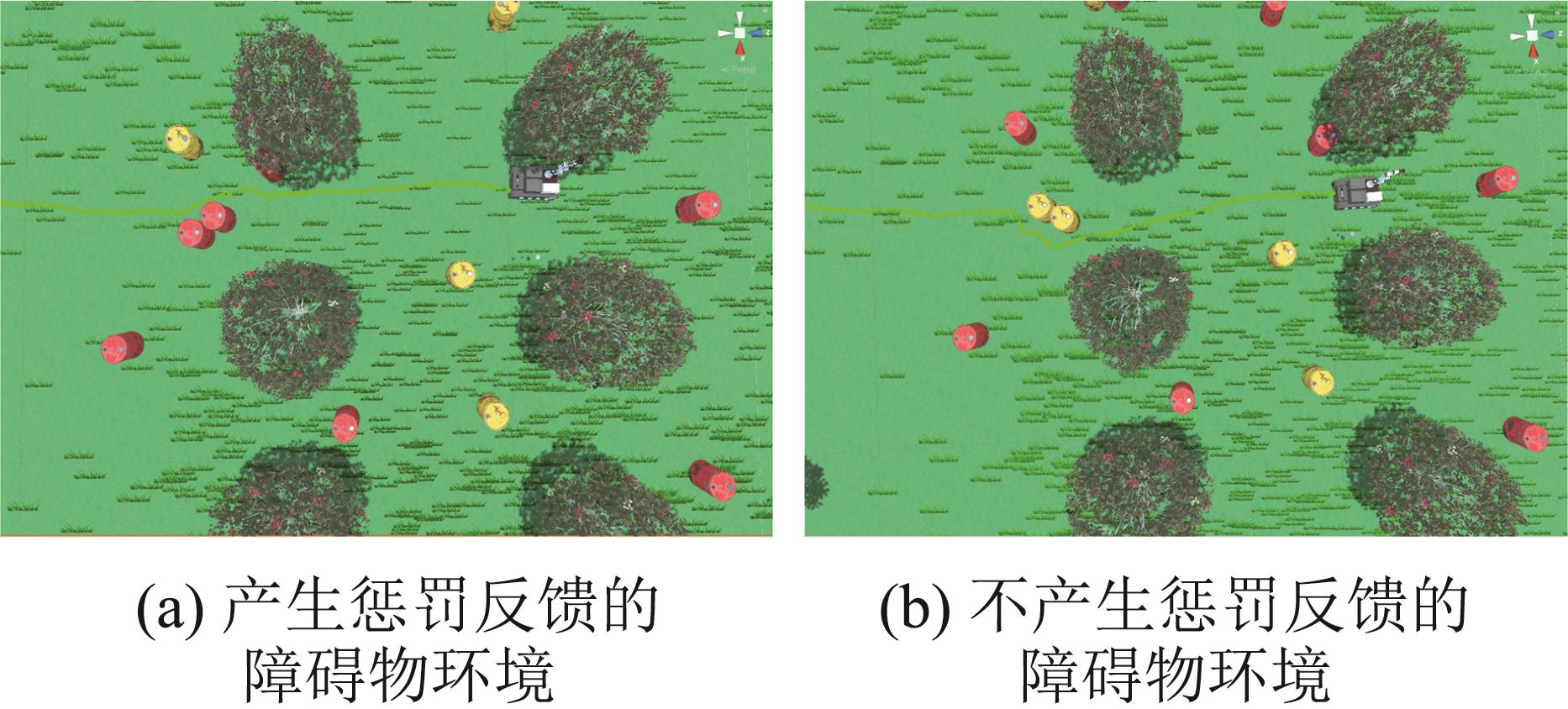
Fig. 10
Autonomous obstacle avoidance path planning results under different reward and punishment mechanisms
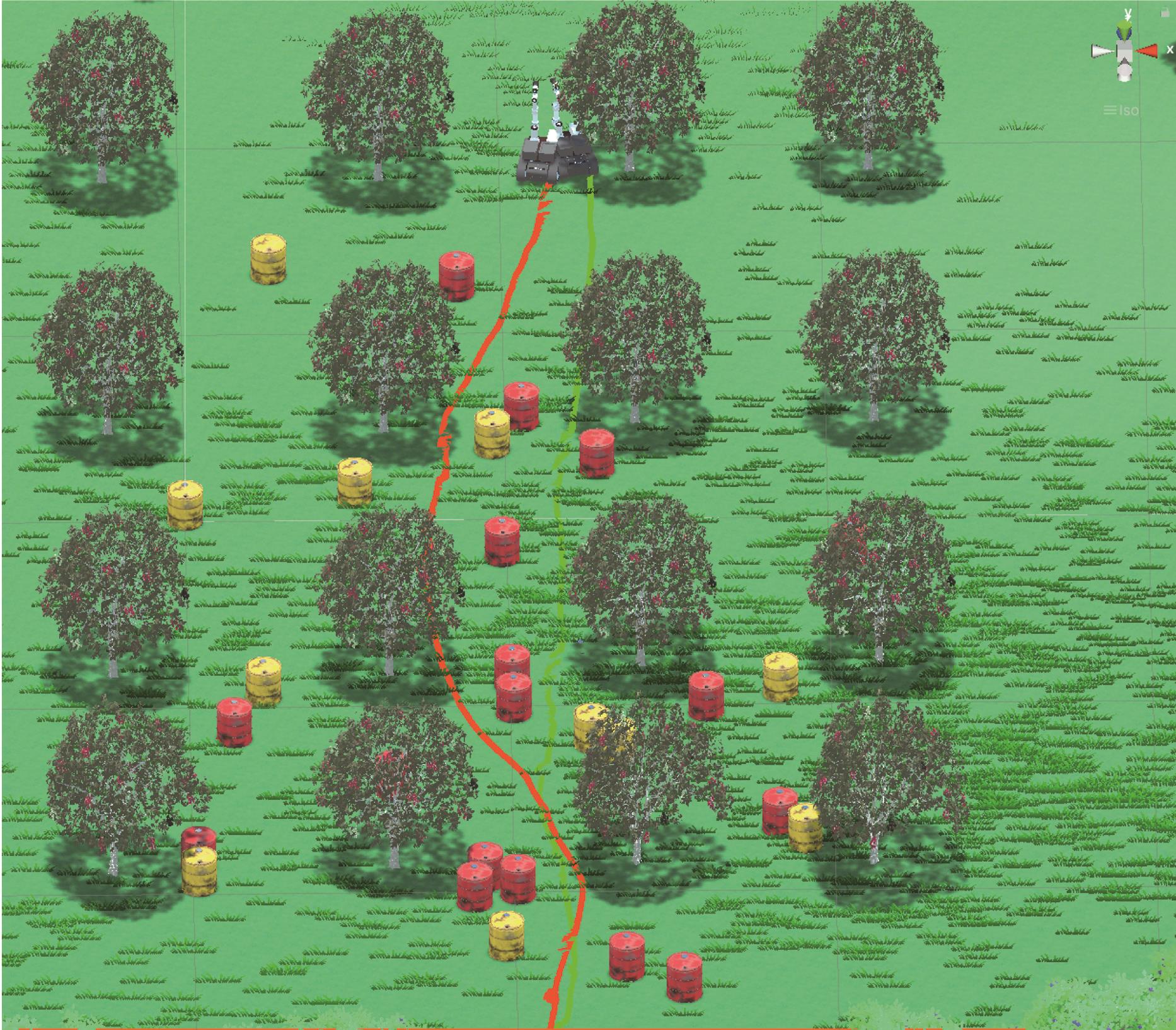

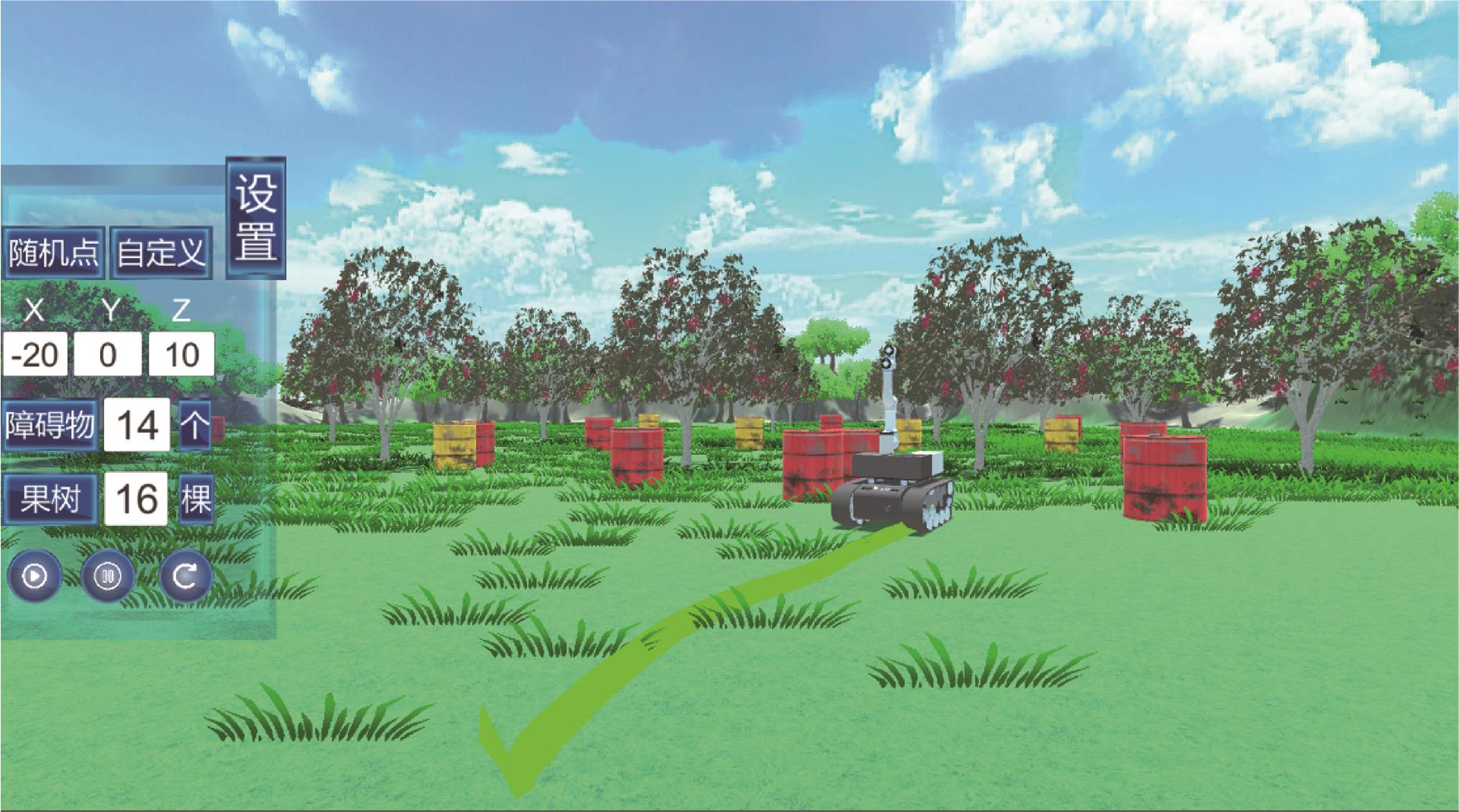
Fig. 11
Effect drawing of picking robot mobile obstacle avoidance operation
| 1 |
胡广锐, 孔微雨, 齐闯, 等. 果园环境下移动采摘机器人导航路径优化[J]. 农业工程学报, 2021, 37(9): 175-184.
|
|
|
|
| 2 |
闫皎洁, 张锲石, 胡希平. 基于强化学习的路径规划技术综述[J]. 计算机工程, 2021, 47(10): 16-25.
|
|
|
|
| 3 |
|
| 4 |
|
| 5 |
陈志梅, 李敏, 邵雪卷, 等. 基于改进RRT算法的桥式起重机避障路径规划[J]. 系统仿真学报, 2021, 33(8): 1832-1838.
|
|
|
|
| 6 |
|
| 7 |
|
| 8 |
邓向阳, 张立民, 方伟, 等. 基于双向汇聚引导蚁群算法的机器人路径规划[J]. 系统仿真学报, 2022, 34(5): 1101-1108.
|
|
|
|
| 9 |
张文, 刘勇, 张超凡, 等. 基于方向A*算法的温室机器人实时路径规划[J]. 农业机械学报, 2017, 48(7): 22-28.
|
|
|
|
| 10 |
李腾, 丁佩佩, 刘金芳. 货到人拣选系统多阶段可穿行多AGV路径规划[J]. 系统仿真学报, 2022, 34(7): 1512-1523.
|
|
|
|
| 11 |
殷建军, 董文龙, 梁利华, 等. 复杂环境下农业机器人路径规划优化方法[J]. 农业机械学报, 2019, 50(5): 17-22.
|
|
|
|
| 12 |
魏武, 韩进, 李艳杰, 等. 基于双树Quick-RRT*算法的移动机器人路径规划[J]. 华南理工大学学报(自然科学版), 2021, 49(7): 51-58.
|
|
|
|
| 13 |
孙辉辉, 胡春鹤, 张军国. 移动机器人运动规划中的深度强化学习方法[J]. 控制与决策, 2021, 36(6): 1281-1292.
|
|
|
|
| 14 |
张荣霞, 武长旭, 孙同超, 等. 深度强化学习及在路径规划中的研究进展[J]. 计算机工程与应用, 2021, 57(19): 44-56.
|
|
|
|
| 15 |
刘全, 翟建伟, 章宗长, 等. 深度强化学习综述[J]. 计算机学报, 2018, 41(1): 1-27.
|
|
|
|
| 16 |
|
| 17 |
徐晓苏, 袁杰. 基于改进强化学习的移动机器人路径规划方法[J]. 中国惯性技术学报, 2019, 27(3): 314-320.
|
|
|
|
| 18 |
王珂, 卜祥津, 李瑞峰, 等. 景深约束下的深度强化学习机器人路径规划[J]. 华中科技大学学报(自然科学版), 2018, 46(12): 77-82.
|
|
|
|
| 19 |
成怡, 郝密密. 改进深度强化学习的室内移动机器人路径规划[J]. 计算机工程与应用, 2021, 57(21): 256-262.
|
|
|
|
| 20 |
|
| 21 |
邹湘军, 罗锡文, 卢俊, 等. 虚拟环境下农业移动机器人行为及其仿真建模[J]. 系统仿真学报, 2006, 18(增2): 551-553, 562.
|
|
|
|
| 22 |
|
| 23 |
|
| 24 |
熊俊涛, 李中行, 陈淑绵, 等. 基于深度强化学习的虚拟机器人采摘路径避障规划[J]. 农业机械学报, 2020, 51(增2): 1-10.
|
|
|
|
| 25 |
熊超, 解武杰, 董文瀚. 基于碰撞锥改进人工势场的无人机避障路径规划[J]. 计算机工程, 2018, 44(9): 314-320.
|
|
|
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Zheng Wei, Tang Jiahao, Xiong Xiaoping, Fan Xin. Intelligent Decision-making Method in Imbalanced Air Combat Based on Asymmetric Self-play [J]. Journal of System Simulation, 2026, 38(2): 433-446. |
| [8] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [9] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [10] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [11] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [12] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [13] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [14] | Chen Zhen, Wu Zhuoyi, Zhang Lin. Research on Policy Representation in Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(7): 1753-1769. |
| [15] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
