

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (3): 545-554.doi: 10.16182/j.issn1004731x.joss.22-1287
• Papers • Previous Articles Next Articles
Gui Xueqi( ), Li Chuntao()
), Li Chuntao()
Received:2022-10-27
Revised:2023-02-16
Online:2024-03-15
Published:2024-03-14
Contact:
Li Chuntao
E-mail:gxq_qi@163.com;lct13770925493@163.com
CLC Number:
Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance[J]. Journal of System Simulation, 2024, 36(3): 545-554.
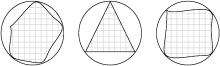
Fig. 1
Minimum circumscribed circle of obstacles
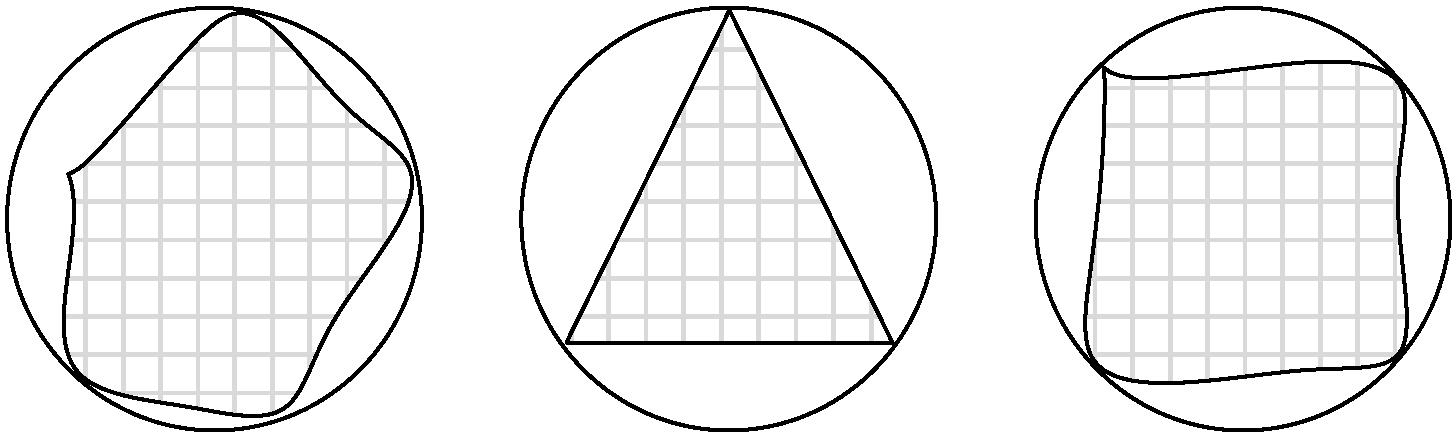
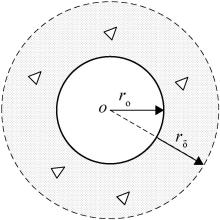
Fig. 2
Area of influence of obstacle
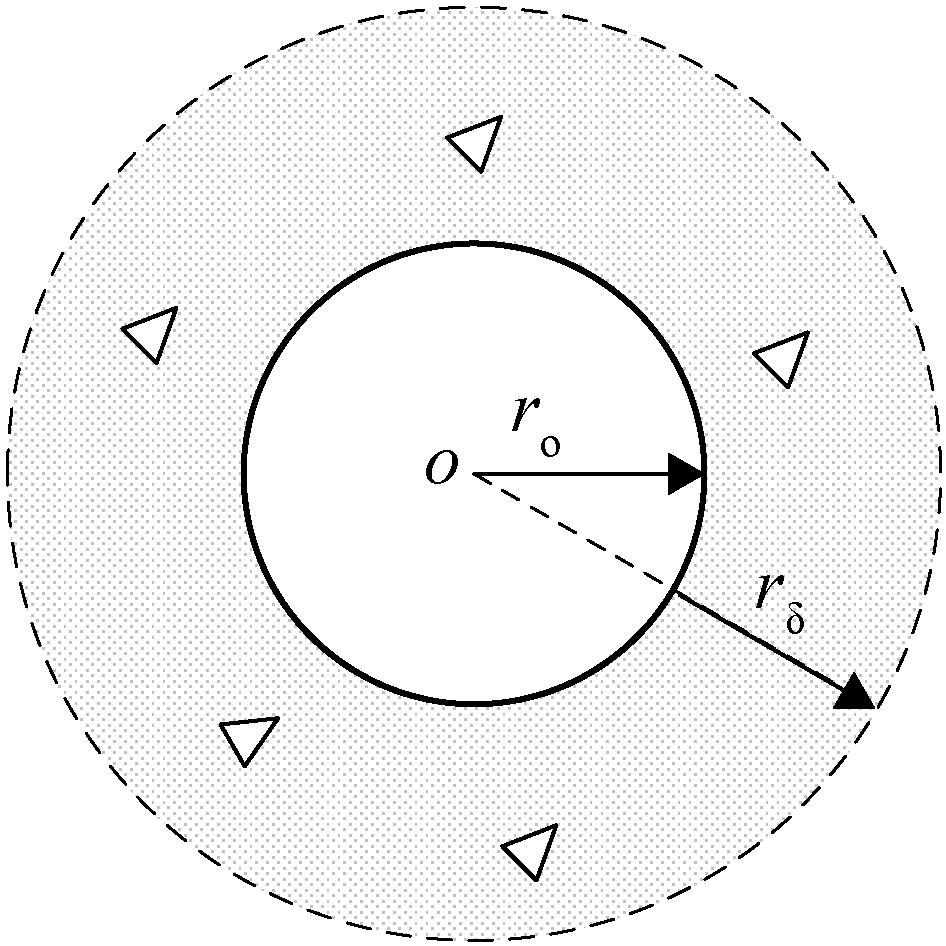
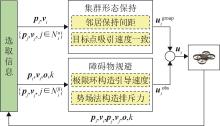
Fig. 3
Structure of swarm obstacle avoidance algorithm
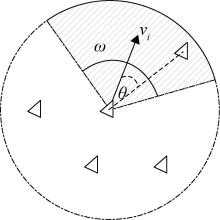
Fig. 4
UAV field of view
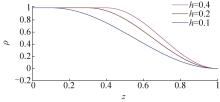
Fig. 5
Curve of smooth function
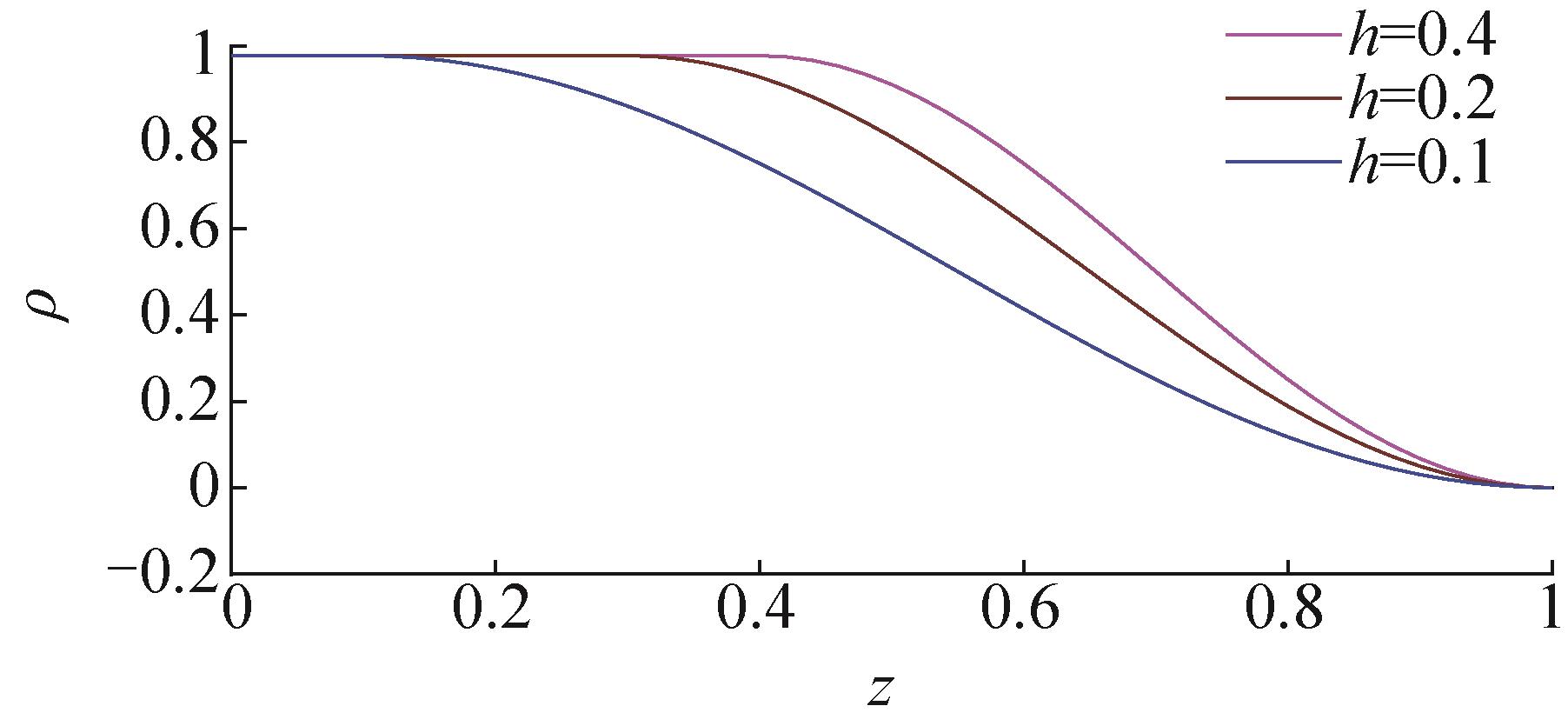
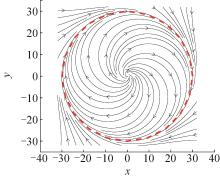
Fig. 6
Limit cycle
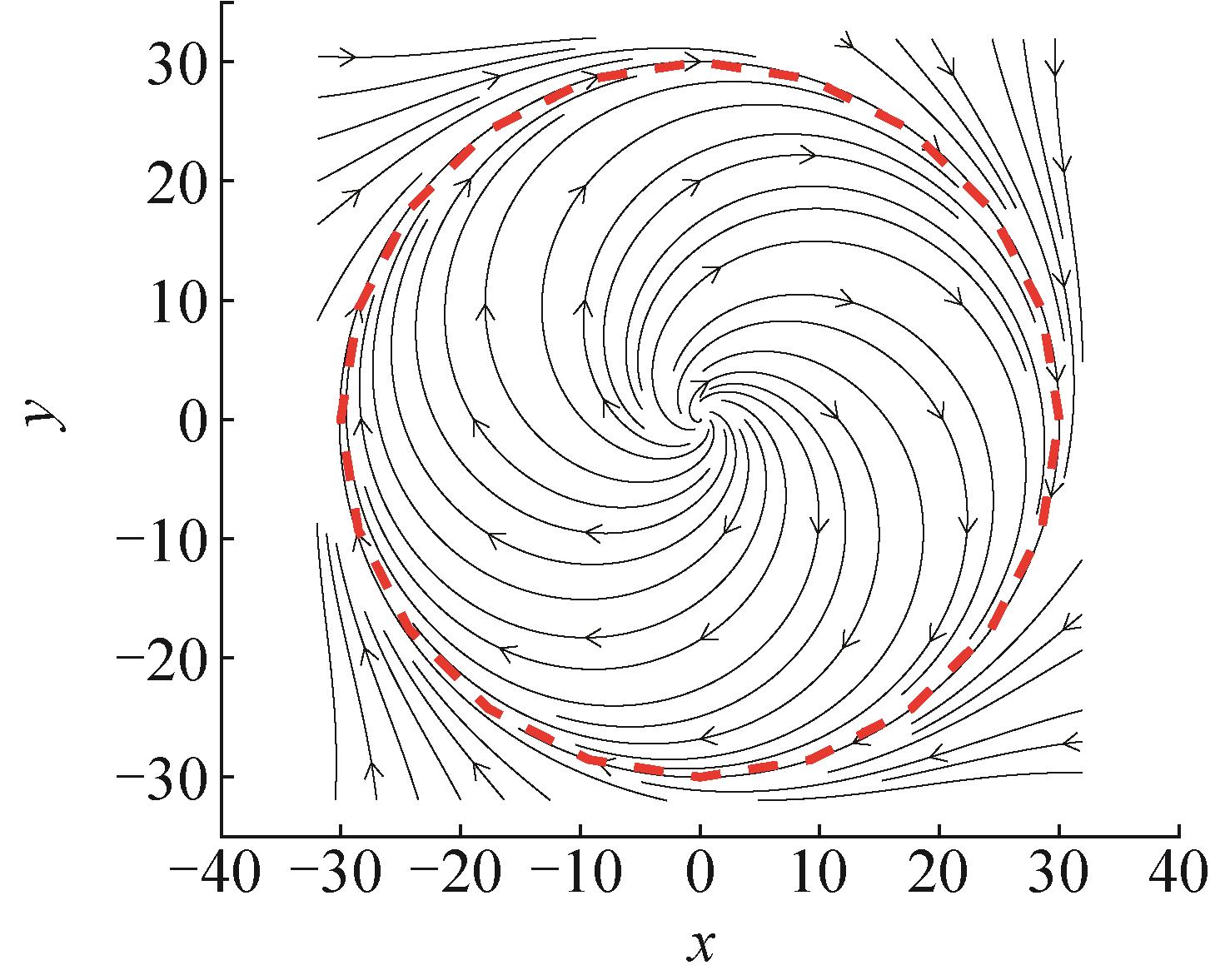
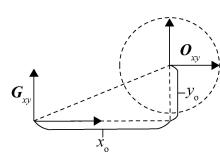
Fig. 7
Relative position of obstacle coordinate system and geodetic coordinate system
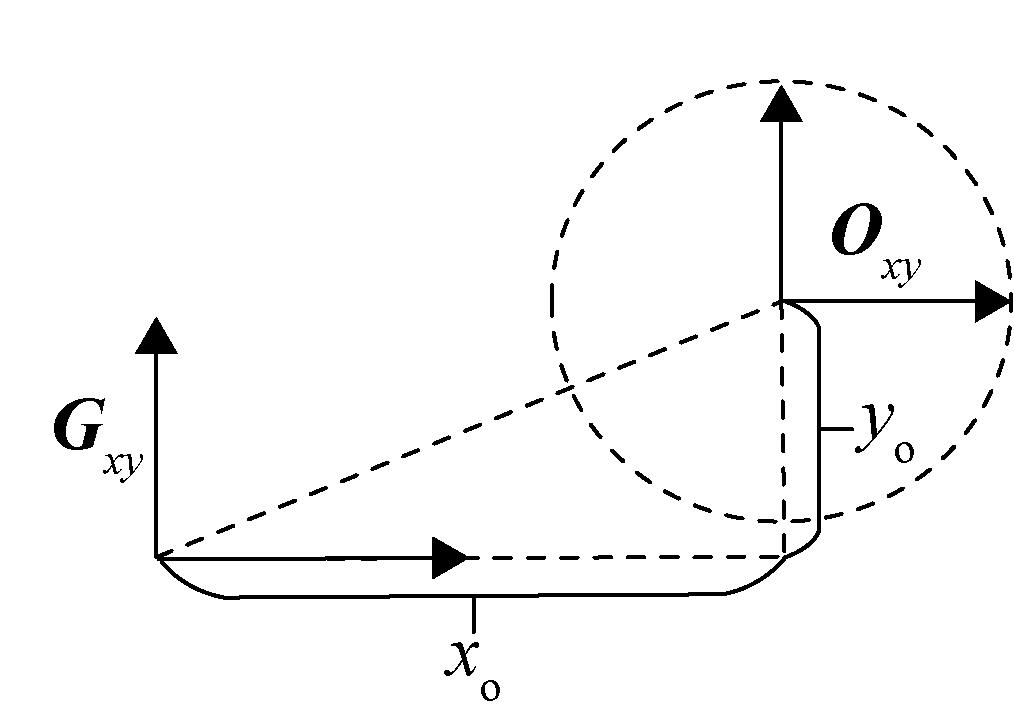
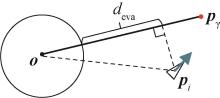
Fig. 8
deva calculation
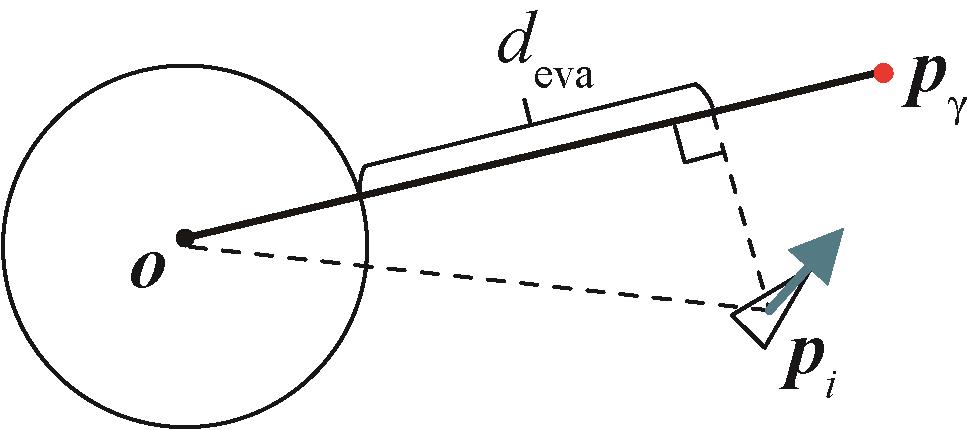
Table 1
Initial state of UAV
| 无人机序列 | 位置/m | 速度/(m/s) |
|---|---|---|
| UAV0 | [2.9,0.7] | [3.4,-0.3] |
| UAV1 | [16.7,-4.6] | [3.3,-0.4] |
| UAV2 | [7.5,-1.1] | [3.5,-0.2] |
| UAV3 | [10.4,7.2] | [3.3-0.27] |
| UAV4 | [8.3,-6.1] | [3.6,0.05] |
| UAV5 | [6.6,4.0] | [3.5,-0.26] |
| UAV6 | [3.6,-4.3] | [3.3,-0.2] |
| UAV7 | [11.3,2.2] | [3.6,-0.2] |
| UAV8 | [12,-2.8] | [2.5,-0.1] |
| UAV9 | [15.9,0.4] | [3.5,-0.34] |
Table 2
UAV parameter setting
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 5 | 10 | ||
| [ | [ | 10 | |
| [-π/2, π/2] | [5,0] | ||
| [80,0] | [ | [0.05,0.3] | |
| [ | [0.8,1.4] | [ | [0.5,0.7] |

Fig. 9
Obstacle avoidance trajectories by VFVG algorithm and Flocking algorithm
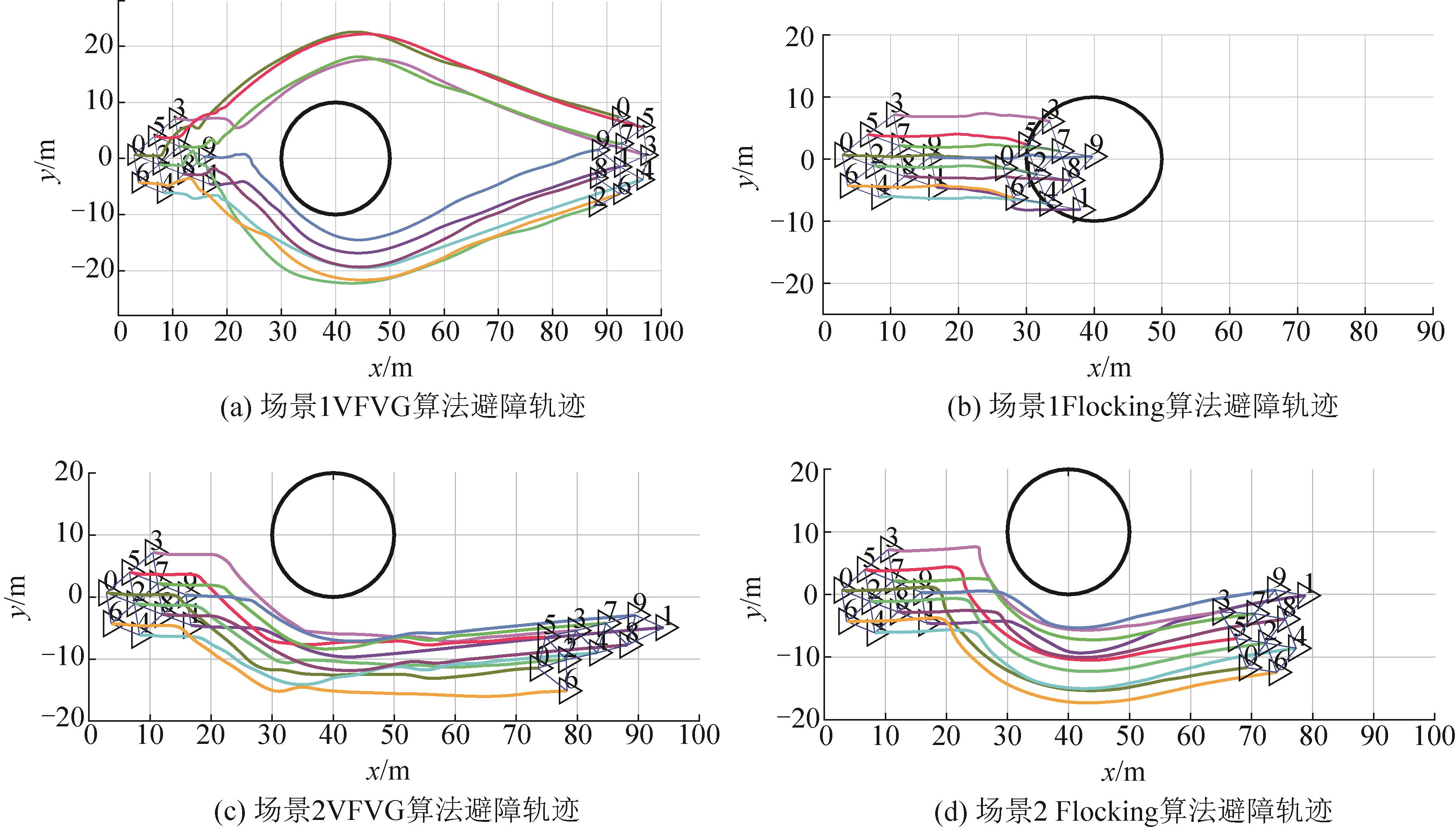
Table 3
Comparison of obstacle avoidance time test results
| 障碍物坐标/m | 算法 | 避障耗时/s |
|---|---|---|
| [40,0] | VFVG | 13.8 |
| Flocking | 避障失败 | |
| [40,-5] | VFVG | 12.18 |
| Flocking | 避障失败 | |
| [40,10] | VFVG | 10.48 |
| Flocking | 15.60 | |
| [40,-10] | VFVG | 11.23 |
| Flocking | 14.95 |
Fig. 10
Obstacle avoidance trajectories in complex environments
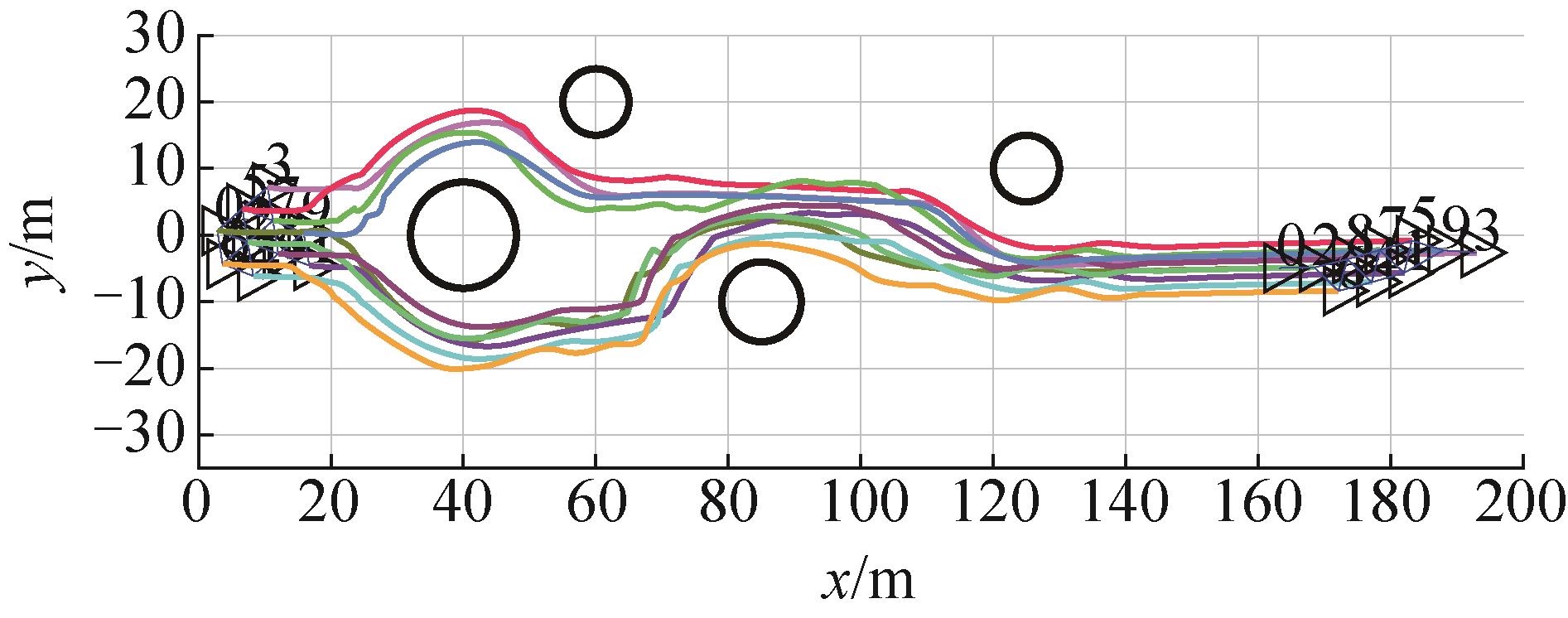

Fig. 11
Distance between neighbors in a swarm
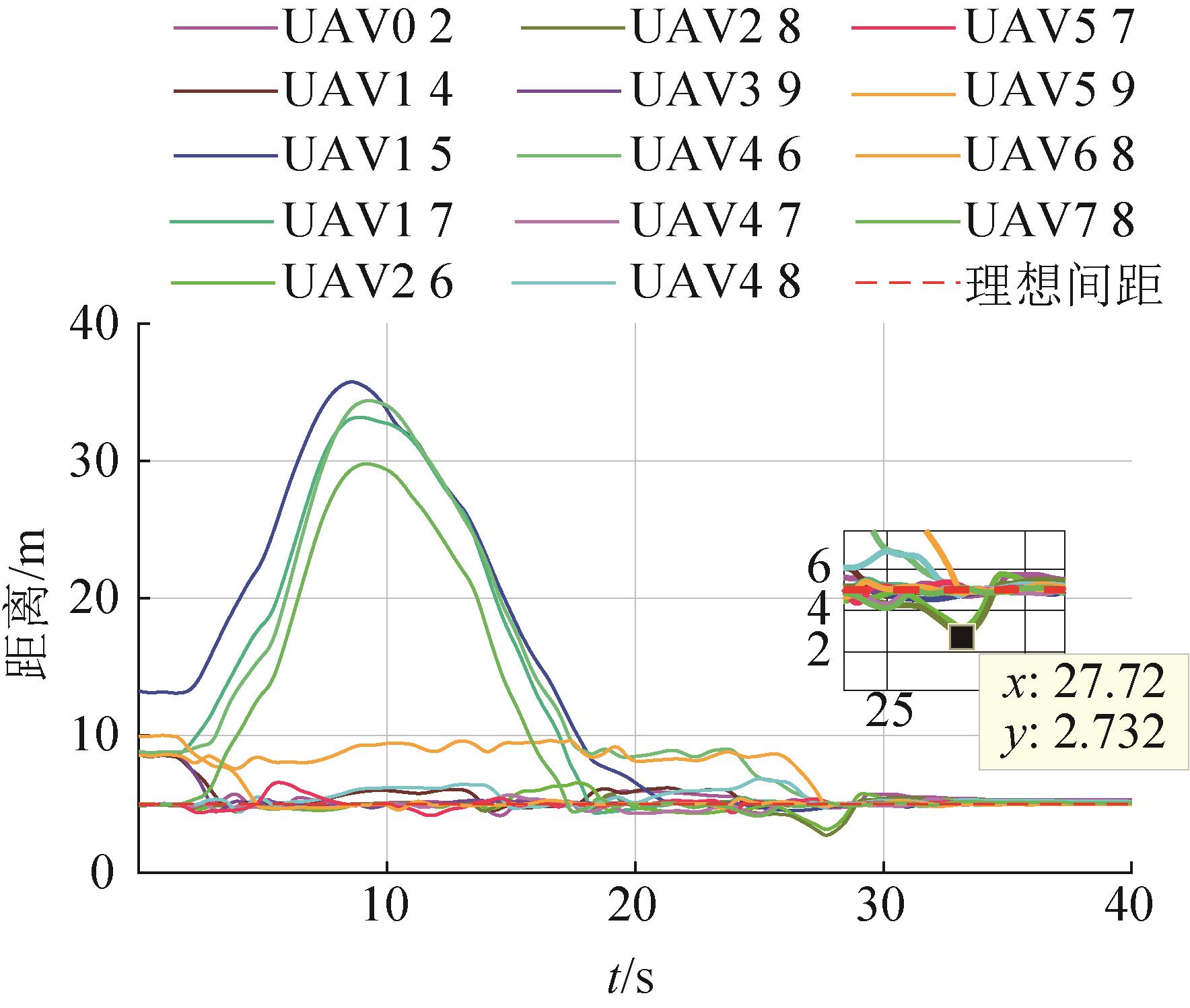

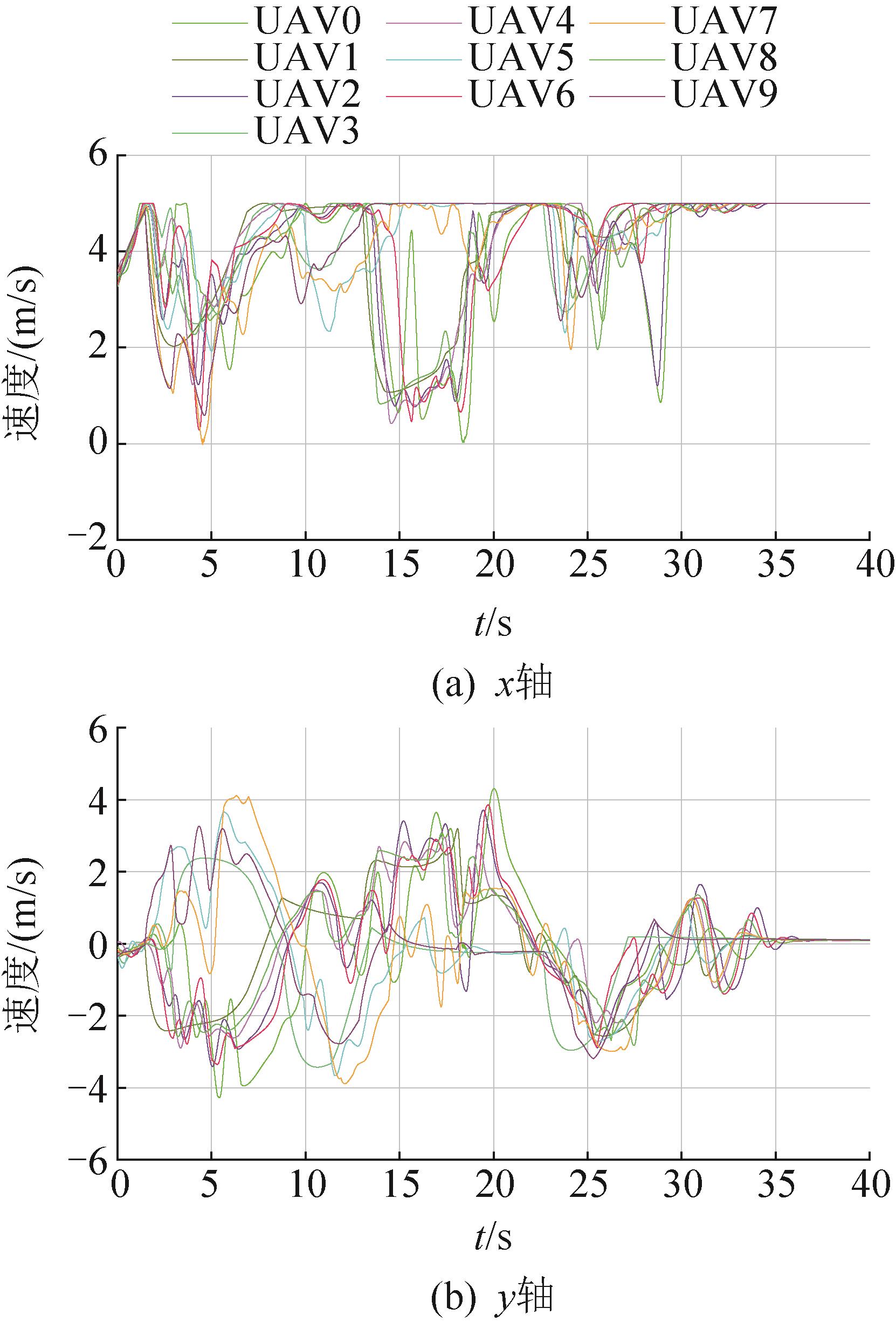
Fig. 12
UAV velocity trend
| 1 | 向锦武, 董希旺, 丁文锐, 等. 复杂环境下无人集群系统自主协同关键技术[J]. 航空学报, 2022, 43(10): 325-357. |
| Xiang Jinwu, Dong Xiwang, Ding Wenrui, et al. Key Technologies for Autonomous Cooperation of Unmanned Swarm Systems in Complex Environments[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): 325-357. | |
| 2 | 魏瑞轩, 王树磊. 先进无人机系统制导与控制[M]. 北京: 国防工业出版社, 2017: 153-155. |
| 3 | 李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37(11): 2423-2431. |
| Li Zhengping, Xian Bin. Robust Distributed Formation Control of Multiple Unmanned Aerial Vehicles Based on Virtual Structure[J]. Control Theory & Applications, 2020, 37(11): 2423-2431. | |
| 4 | 费思远, 鲜斌, 王岭. 基于群集行为的分布式多无人机编队动态避障控制[J]. 控制理论与应用, 2022, 39(1): 1-11. |
| Fei Siyuan, Xian Bin, Wang Ling. Distributed Formation Control for Multiple Unmanned Aerial Vehicles with Dynamic Obstacle Avoidance Based on the Flocking Behavior[J]. Control Theory & Applications, 2022, 39(1): 1-11. | |
| 5 | 张栋, 马苏慧, 吕石, 等. 多智能体系统事件触发一致性研究综述[J]. 北京理工大学学报, 2022, 42(10): 1059-1072. |
| Zhang Dong, Ma Suhui, Shi Lü, et al. Overview on Event-Triggered Consensus of Multi-agent Systems[J]. Transactions of Beijing Institute of Technology, 2022, 42(10): 1059-1072. | |
| 6 | Reynolds C W. Flocks, Herds and Schools: A Distributed Behavioral Model[J]. ACM SIGGRAPH Computer Graphics, 1987, 21(4): 25-34. |
| 7 | Olfati-Saber R. Flocking for Multi-agent Dynamic Systems: Algorithms and Theory[J]. IEEE Transactions on Automatic Control, 2006, 51(3): 401-420. |
| 8 | Sakai Daito, Fukushima Hiroaki, Matsuno Fumitoshi. Flocking for Multirobots Without Distinguishing Robots and Obstacles[J]. IEEE Transactions on Control Systems Technology, 2017, 25(3): 1019-1027. |
| 9 | Li Jiaojie, Zhang Wei, Su Housheng, et al. Flocking of Partially-informed Multi-agent Systems Avoiding Obstacles with Arbitrary Shape[J]. Autonomous Agents and Multi-agent Systems, 2015, 29(5): 943-972. |
| 10 | 杨盼盼, 刘明雍, 雷小康, 等. 群集系统分群行为建模与控制研究进展[J]. 控制与决策, 2016, 31(2): 193-206. |
| Yang Panpan, Liu Mingyong, Lei Xiaokang, et al. Progress in Modeling and Control of Fission Behavior for Flocking System[J]. Control and Decision, 2016, 31(2): 193-206. | |
| 11 | Zhao Weiwei, Chu Hairong, Zhang Mingyue, et al. Flocking Control of Fixed-wing UAVs with Cooperative Obstacle Avoidance Capability[J]. IEEE Access, 2019, 7: 17798-17808. |
| 12 | 王曼, 李大鹏, 丁良辉, 等. 基于虚拟子目标联合边界力的编队避障算法[J]. 系统仿真学报, 2023, 35(9): 1918-1930. |
| Wang Man, Li Dapeng, Ding Lianghui, et al. Formation Obstacle Avoidance Algorithm Based on Joint Virtual Sub-target and Boundary Force[J]. Journal of System Simulation, 2023, 35(9): 1918-1930. | |
| 13 | Hewahi Nabil M, Alkader A Almobayed Abed. Swarm Robotics with Circular Formation Motion Including Obstacles Avoidance[J]. Brain Broad Research in Artificial Intelligence and Neuroscience, 2017, 8(2): 125-143. |
| 14 | Wang Xun, Wang Xiangke, Zhang Daibing, et al. A Liquid Sphere-inspired Physicomimetics Approach for Multiagent Formation Control[J]. International Journal of Robust and Nonlinear Control, 2018, 28(15): 4565-4583. |
| 15 | Zhang Haitao, Chen Zhiyong, Vicsek T, et al. Route-Dependent Switch Between Hierarchical and Egalitarian Strategies in Pigeon Flocks[J]. Scientific Reports, 2014, 4(1): 5805. |
| 16 | 王庆禄, 吴冯国, 郑成辰, 等. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5): 1461-1468. |
| Wang Qinglu, Wu Fengguo, Zheng Chengchen, et al. UAV Path Planning Based on Optimized Artificial Potential Field Method[J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. | |
| 17 | Dong Han Kim, Hwan Kim Jong. A Real-time Limit-cycle Navigation Method for Fast Mobile Robots and Its Application to Robot Soccer[J]. Robotics and Autonomous Systems, 2003, 42(1): 17-30. |
| [1] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [2] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [3] | Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(3): 782-794. |
| [4] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [5] | Ai Gaohang, Li Chuntao. UAV Swarm Obstacle Avoidance Based on Visual Filed and Adaptive Radius [J]. Journal of System Simulation, 2024, 36(12): 2945-2959. |
| [6] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [7] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| [8] | Li Wenjing, Luo Yanlin, Wang Yuhui, Zhu Li. Virtual Navigation Path Planning Based on Octree Potential Field for Endonasal Endoscope [J]. Journal of System Simulation, 2023, 35(9): 2054-2063. |
| [9] | Wang Man, Li Dapeng, Ding Lianghui, Zhu Tianlin. Formation Obstacle Avoidance Algorithm Based on Joint Virtual Sub-target and Boundary Force [J]. Journal of System Simulation, 2023, 35(9): 1918-1930. |
| [10] | Junqiang Lin, Hongjun Wang, Xiangjun Zou, Po Zhang, Chengen Li, Yipeng Zhou, Shujie Yao. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO [J]. Journal of System Simulation, 2023, 35(8): 1692-1704. |
| [11] | Junxiao Xue, Xiangyan Kong, Bowei Dong, Hao Tao, Haiyang Guan, Lei Shi, Mingliang Xu. Obstacle Avoidance and Simulation of Carrier-Based Aircraft on the Deck of Aircraft Carrier [J]. Journal of System Simulation, 2023, 35(3): 592-603. |
| [12] | Kan Li, Yunpeng Li, Jiangbo Zhao. Design and Implementation of UAV Swarm Self-organizing Search Model [J]. Journal of System Simulation, 2022, 34(8): 1820-1833. |
| [13] | Yuchao Zhang, Yuan Jiang, Jiyang Dai. Dynamic Obstacle Avoidance Control of Three-order Multi-robot Cooperative Formation [J]. Journal of System Simulation, 2022, 34(8): 1762-1774. |
| [14] | Guangjian Tian, Jiyang Dai, Jin Ying, Ning Wang. Multi-UAV Trajectory Planning Based on Adaptive Segmented Potential Field Method [J]. Journal of System Simulation, 2022, 34(11): 2368-2376. |
| [15] | Wei Ruixuan, Wu Zichen. Study on Task Allocation of UAV Swarm Based on Cognitive Control [J]. Journal of System Simulation, 2021, 33(7): 1574-1581. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
