

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (11): 2918-2926.doi: 10.16182/j.issn1004731x.joss.24-0665
• Papers • Previous Articles Next Articles
Zhang Chi1, Wei Wei2
Received:2024-06-24
Revised:2024-08-05
Online:2025-11-18
Published:2025-11-27
Contact:
Wei Wei
CLC Number:
Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm[J]. Journal of System Simulation, 2025, 37(11): 2918-2926.
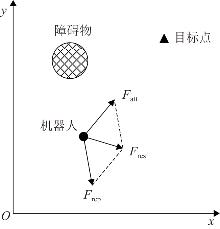
Fig. 1
Traditional artificial potential field method principle diagram
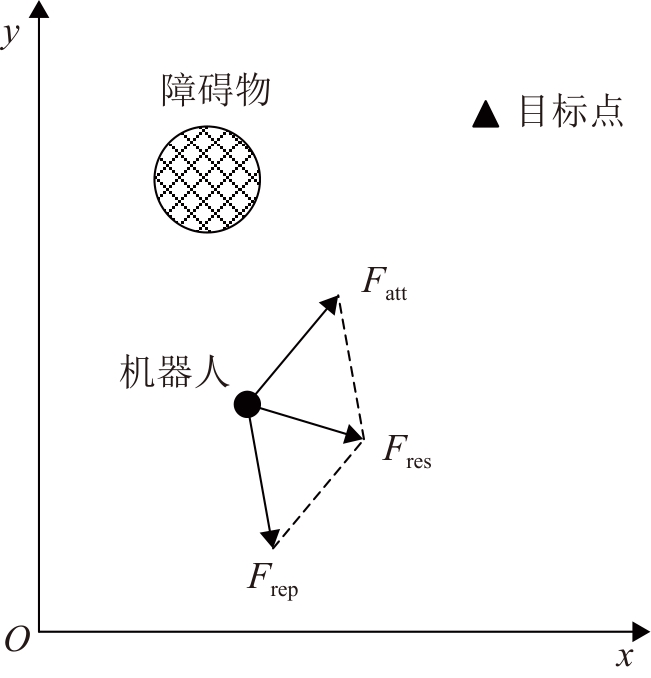
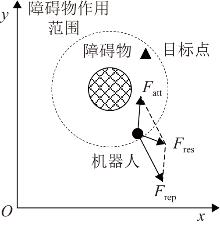
Fig. 2
Unreachable target problem
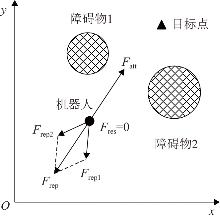
Fig. 3
Local minimum value problem
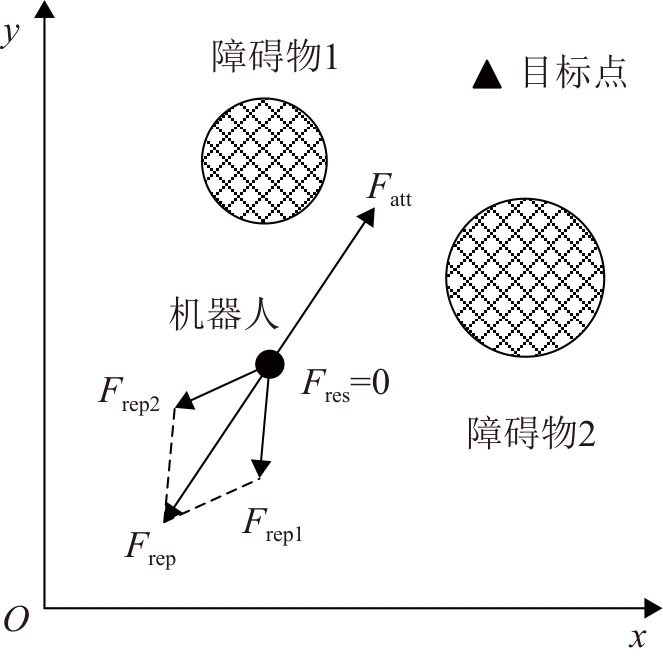
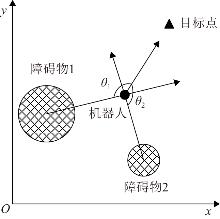
Fig. 4
Obstacle angle
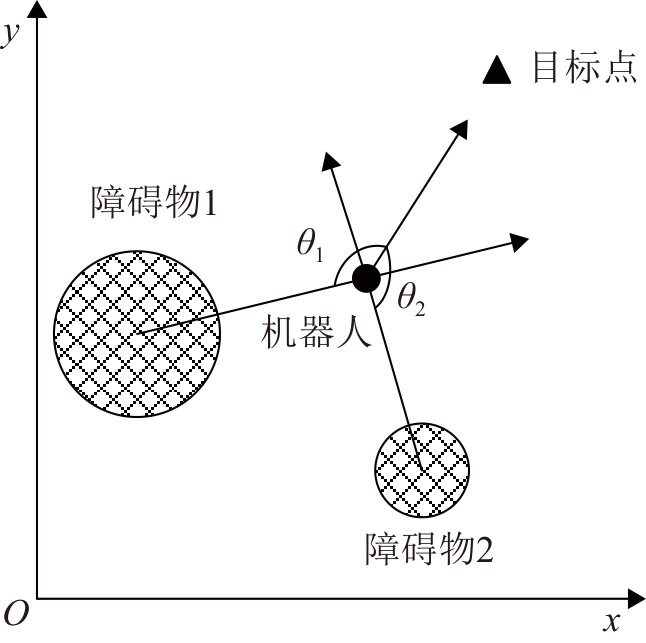
Fig. 5
Obstacle angle factor function
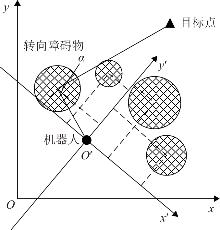
Fig. 6
Coordinate system transformation
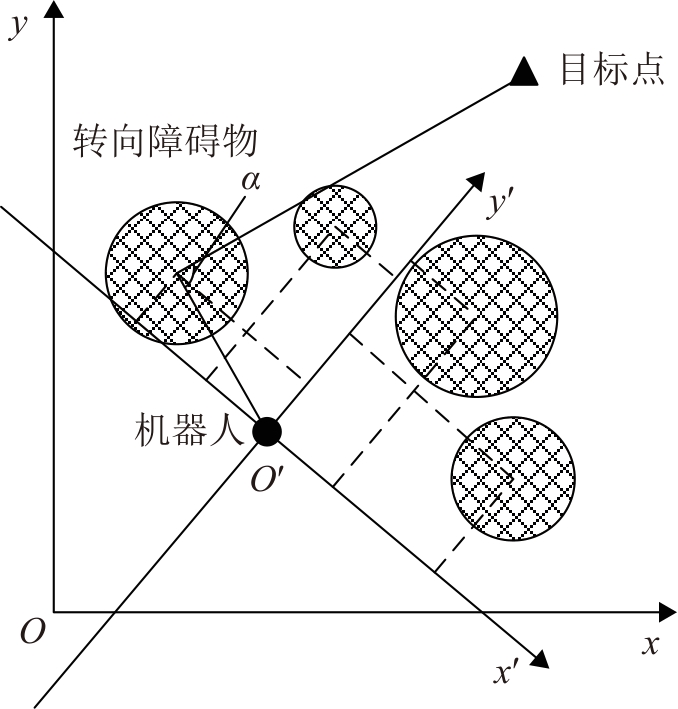
Fig. 7
Steering angle factor function
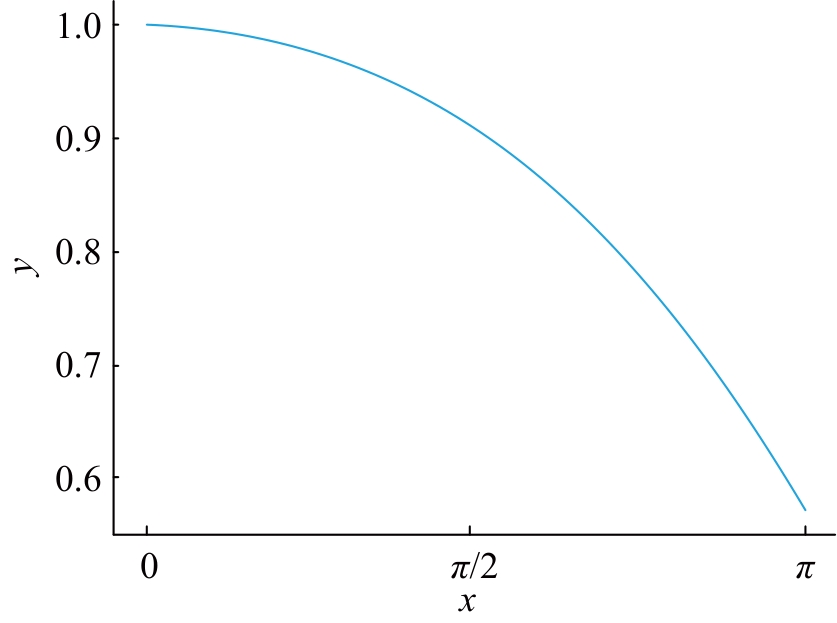
Fig. 8
Applying escape force
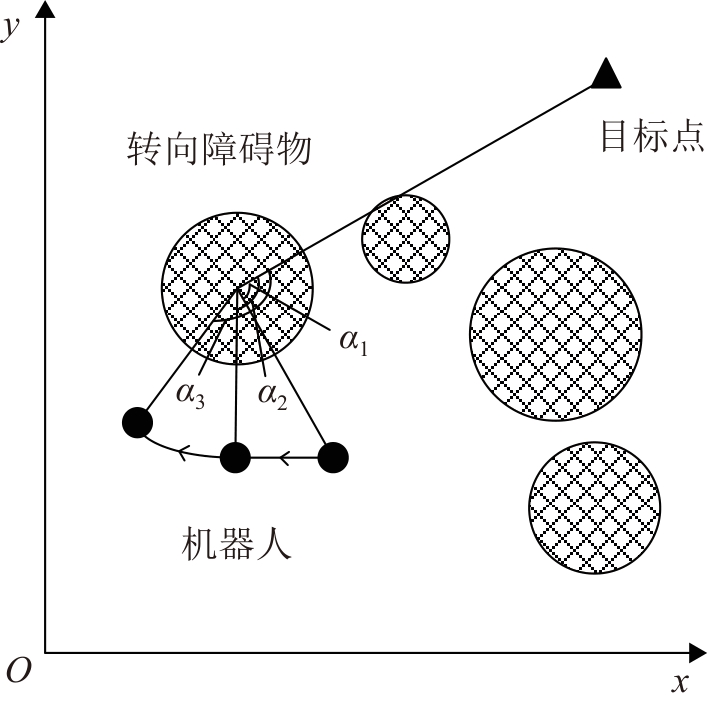
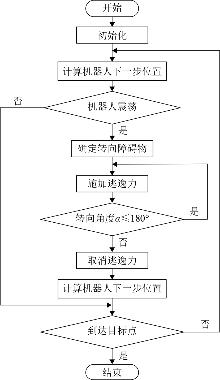
Fig. 9
Improved algorithm flowchart
Table 1
Parameter Data
| 参数名称 | 数量/大小 |
|---|---|
| 引力增益系数 | 1 |
| 斥力增益系数 | 10 |
| 障碍物影响距离 | 3 |
| 步长 | 0.01 |
| 障碍物数量 | 9 |
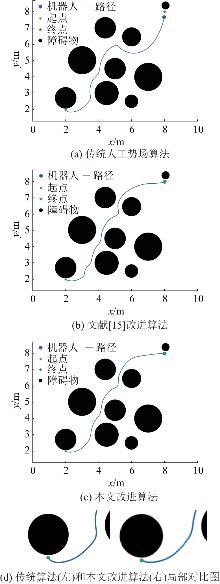
Fig. 10
Simulation results in a typical experimental environment
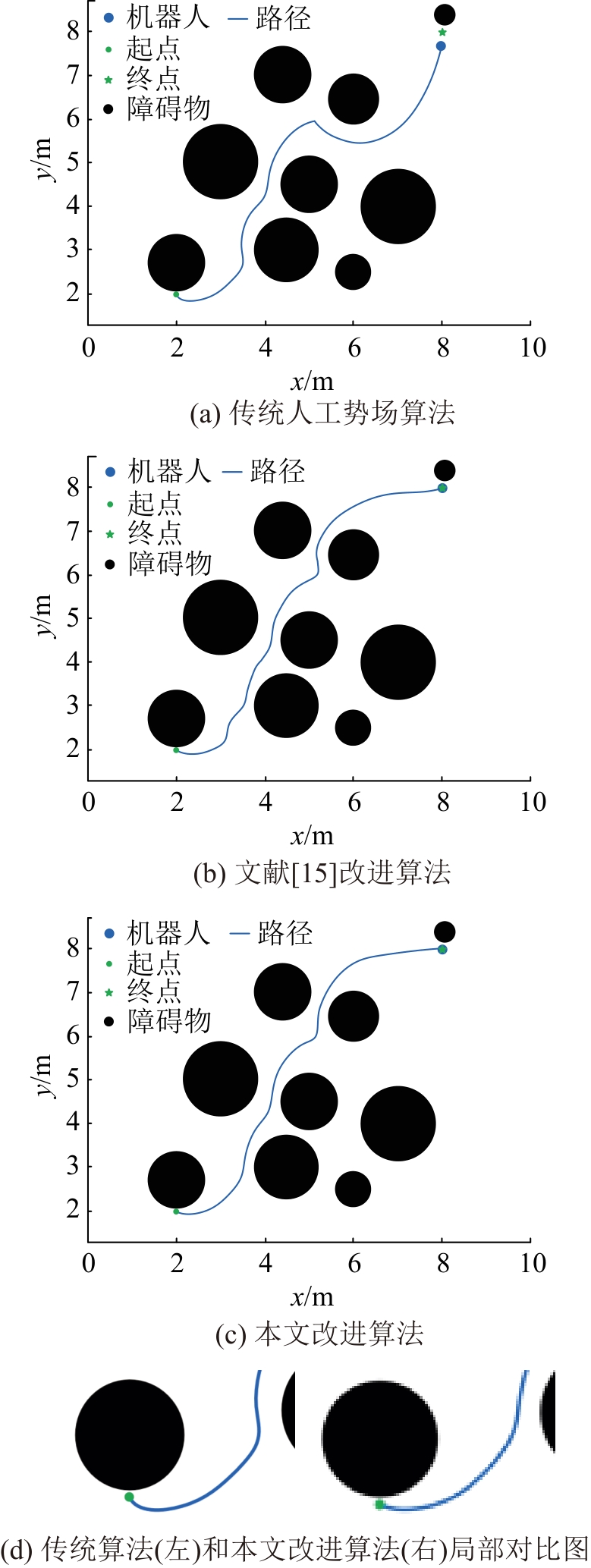
Table 2
Algorithm Data in Typical Experimental Environment
| 算法 | 路径长度/m | 迭代次数 | 时间/s |
|---|---|---|---|
| 传统人工势场法 | — | 3 001 | 0.207 |
| 文献[ | 9.57 | 1 106 | 0.175 |
| 本文改进算法 | 9.03 | 904 | 0.143 |
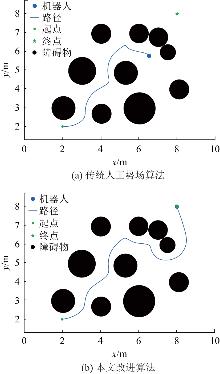
Fig. 11
Simulation results in a complex experimental environment
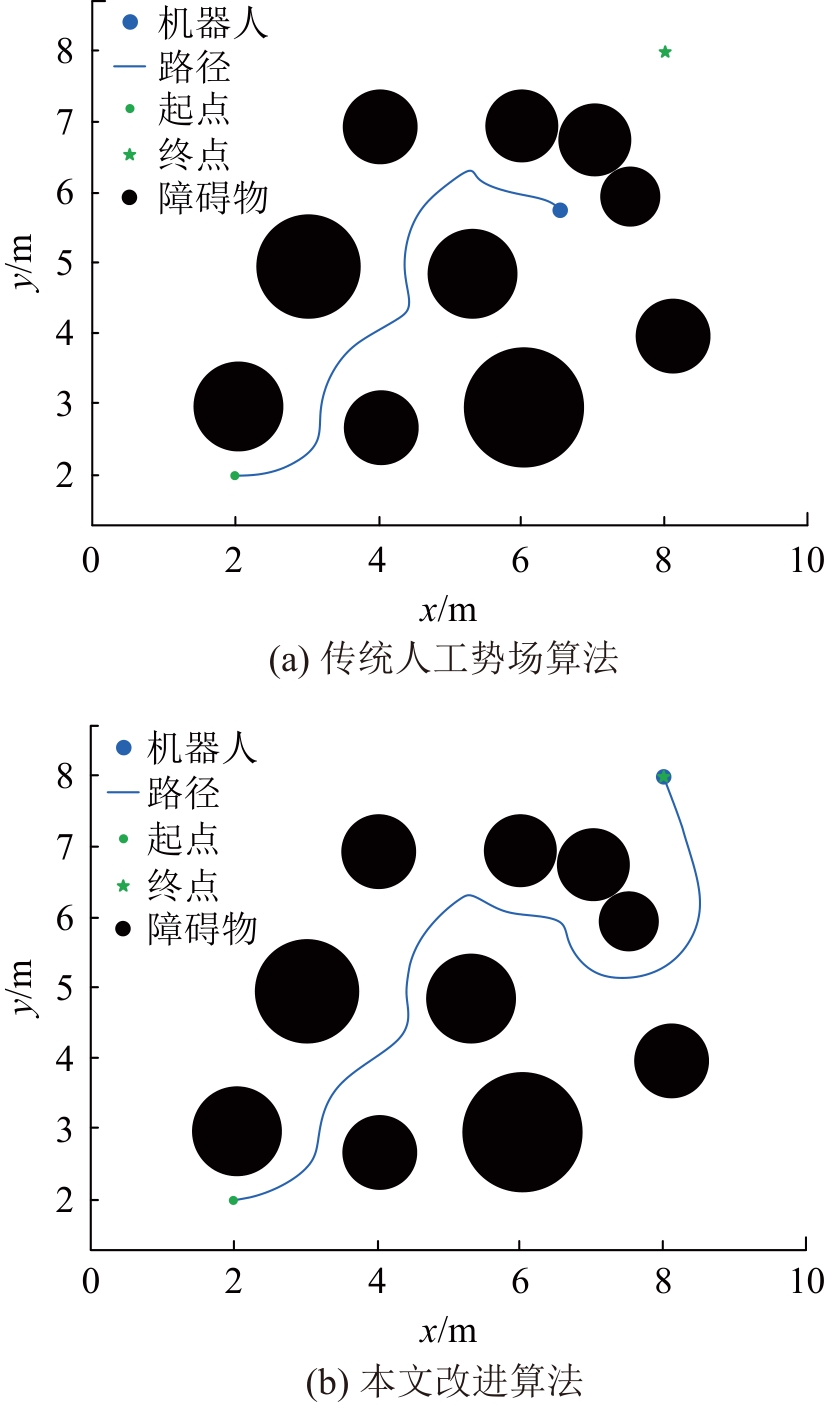
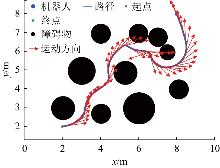
Fig. 12
Robot motion direction diagram
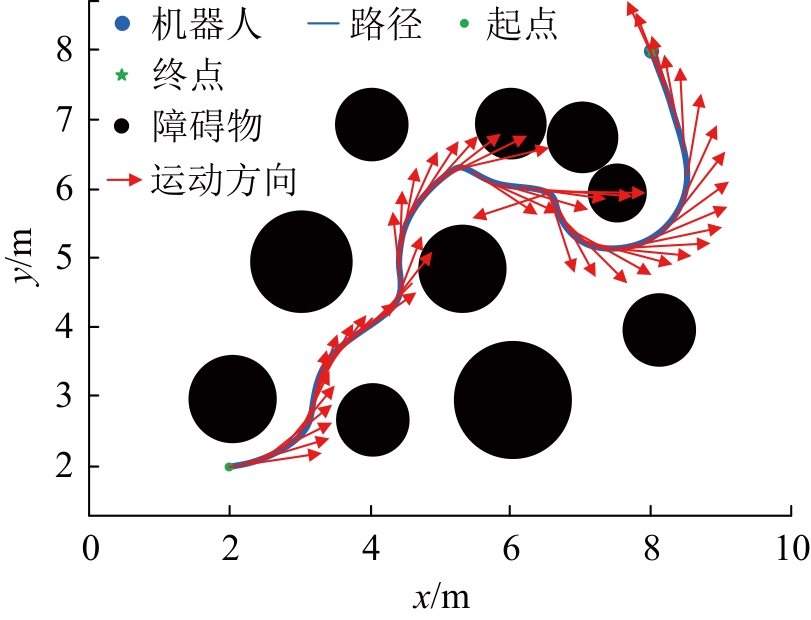
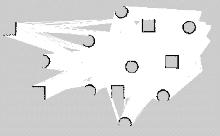
Fig. 13
Simulation map
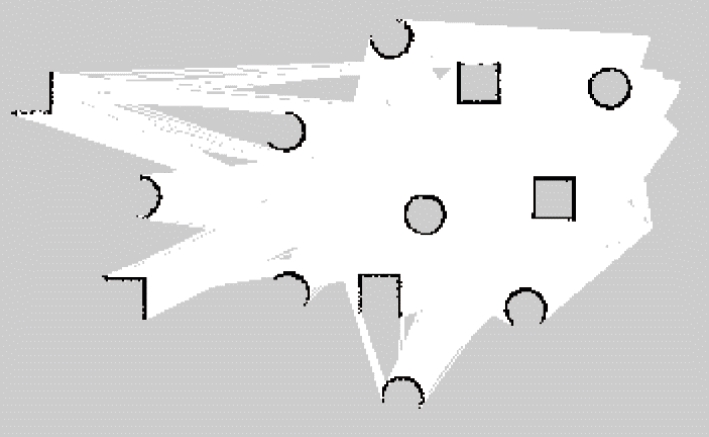

Fig. 14
Gazebo simulation environment
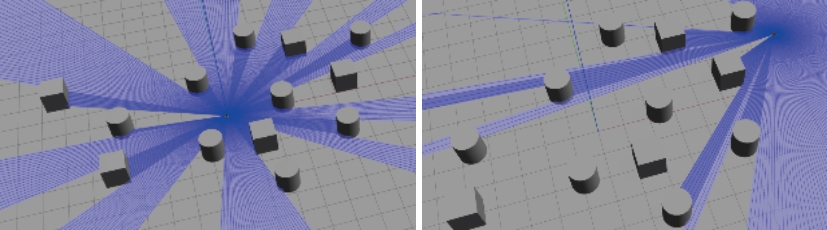

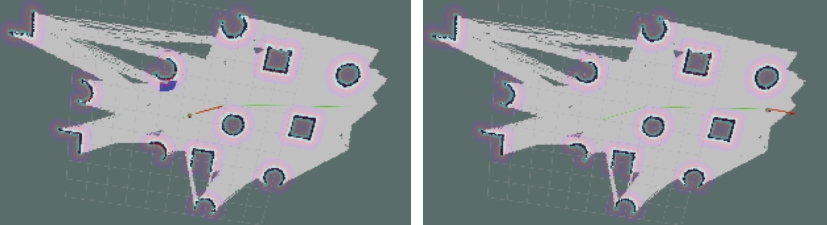
Fig. 15
Rviz visualization environment
| [1] | 林韩熙, 向丹, 欧阳剑, 等. 移动机器人路径规划算法的研究综述[J]. 计算机工程与应用, 2021, 57(18): 38-48. |
| Lin Hanxi, Xiang Dan, Ouyang Jian, et al. Review of Path Planning Algorithms for Mobile Robots[J]. Computer Engineering and Applications, 2021, 57(18): 38-48. | |
| [2] | 李晓旭, 马兴录, 王先鹏. 移动机器人路径规划算法综述[J]. 计算机测量与控制, 2022, 30(7): 9-19. |
| Li Xiaoxu, Ma Xinglu, Wang Xianpeng. A Survey of Path Planning Algorithms for Mobile Robots[J]. Computer Measurement & Control, 2022, 30(7): 9-19. | |
| [3] | Zhang Huixia, Tao Yadong, Zhu Wenliang. Global Path Planning of Unmanned Surface Vehicle Based on Improved A-star Algorithm[J]. Sensors, 2023, 23(14): 6647. |
| [4] | Alshammrei Shaher, Boubaker Sahbi, Kolsi Lioua. Improved Dijkstra Algorithm for Mobile Robot Path Planning and Obstacle Avoidance[J]. Computers, Materials and Continua, 2022, 72(3): 5939-5954. |
| [5] | 张瑞, 周丽, 刘正洋. 融合RRT*与DWA算法的移动机器人动态路径规划[J]. 系统仿真学报, 2024, 36(4): 957-968. |
| Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach[J]. Journal of System Simulation, 2024, 36(4): 957-968. | |
| [6] | 马宗方, 张琳旋, 宋琳, 等. 基于改进动态窗口的车库AGV路径规划及仿真[J]. 系统仿真学报, 2024, 36(10): 2265-2276. |
| Ma Zongfang, Zhang Linxuan, Song Lin, et al. Garage AGV Path Planning and Simulation Based on Improved DWA[J]. Journal of System Simulation, 2024, 36(10): 2265-2276. | |
| [7] | 吕刚, 吕金壮, 邓军, 等. 部分环境信息未知下的机器人动态路径规划算法[J]. 自动化与仪器仪表, 2022(3): 186-190. |
| Gang Lü, Jinzhuang Lü, Deng Jun, et al. Dynamic Path Planning Algorithm for Robots with Partially Unknown Environmental Information[J]. Automation & Instrumentation, 2022(3): 186-190. | |
| [8] | Lin Zenan, Yue Ming, Chen Guangyi, et al. Path Planning of Mobile Robot with PSO-based APF and Fuzzy-based DWA Subject to Moving Obstacles[J]. Transactions of the Institute of Measurement and Control, 2022, 44(1): 121-132. |
| [9] | Wang Pengwei, Gao Song, Li Liang, et al. Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm[J]. Energies, 2019, 12(12): 2342. |
| [10] | Tawseef Ahmed Teli, Arif Wani M. A Fuzzy Based Local Minima Avoidance Path Planning in Autonomous Robots[J]. International Journal of Information Technology, 2021, 13(1): 33-40. |
| [11] | Orozco-Rosas Ulises, Montiel Oscar, Sepúlveda Roberto. Mobile Robot Path Planning Using Membrane Evolutionary Artificial Potential Field[J]. Applied Soft Computing, 2019, 77: 236-251. |
| [12] | Wang Siming, Zhao Tiantian, Li Weijie. Mobile Robot Path Planning Based on Improved Artificial Potential Field Method[C]//2018 IEEE International Conference of Intelligent Robotic and Control Engineering (IRCE). Piscataway: IEEE, 2018: 29-33. |
| [13] | 周克帅, 范平清. 改进A*算法与人工势场算法移动机器人路径规划[J]. 电子器件, 2021, 44(2): 368-374. |
| Zhou Keshuai, Fan Pingqing. Improved A* Algorithm and Artificial Potential Field Algorithm for Mobile Robot Path Planning[J]. Chinese Journal of Electron Devices, 2021, 44(2): 368-374. | |
| [14] | 徐小强, 王明勇, 冒燕. 基于改进人工势场法的移动机器人路径规划[J]. 计算机应用, 2020, 40(12): 3508-3512. |
| Xu Xiaoqiang, Wang Mingyong, Mao Yan. Path Planning of Mobile Robot Based on Improved Artificial Potential Field Method[J]. Journal of Computer Applications, 2020, 40(12): 3508-3512. | |
| [15] | 涂柯, 侯宏录, 苏炜. 改进人工势场法的无人机避障路径规划[J]. 西安工业大学学报, 2022, 42(2): 170-177. |
| Tu Ke, Hou Honglu, Su Wei. Obstacle Avoidance Path Planning of UAV Based on Improved Artificial Potential Field Method[J]. Journal of Xi'an Technological University, 2022, 42(2): 170-177. | |
| [16] | Khatib O. Real-time Obstacle Avoidance for Manipulators and Mobile Robots[J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. |
| [17] | Priyadarshi Biplab Kumar, Rawat Himanshu, Parhi Dayal R. Path Planning of Humanoids Based on Artificial Potential Field Method in Unknown Environments[J]. Expert Systems, 2019, 36(2): e12360. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
