

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (5): 1141-1151.doi: 10.16182/j.issn1004731x.joss.23-0012
Previous Articles Next Articles
Xiao Peng1( ), Xie Feng2, Ni Haihong1, Zhang Min1, Tang Zhili1,3, Li Ni1,3()
), Xie Feng2, Ni Haihong1, Zhang Min1, Tang Zhili1,3, Li Ni1,3()
Received:2023-01-04
Revised:2023-02-14
Online:2024-05-15
Published:2024-05-21
Contact:
Li Ni
E-mail:2018294150@qq.com;lini@nwpu.edu.cn
CLC Number:
Xiao Peng, Xie Feng, Ni Haihong, Zhang Min, Tang Zhili, Li Ni. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning[J]. Journal of System Simulation, 2024, 36(5): 1141-1151.

Fig. 1
Schematic diagram of polygon scan

Fig. 2
Schematic diagram of threat area
Fig. 3
Multitasking and path planning co-optimization framework
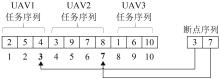
Fig. 4
Gene coding sequence
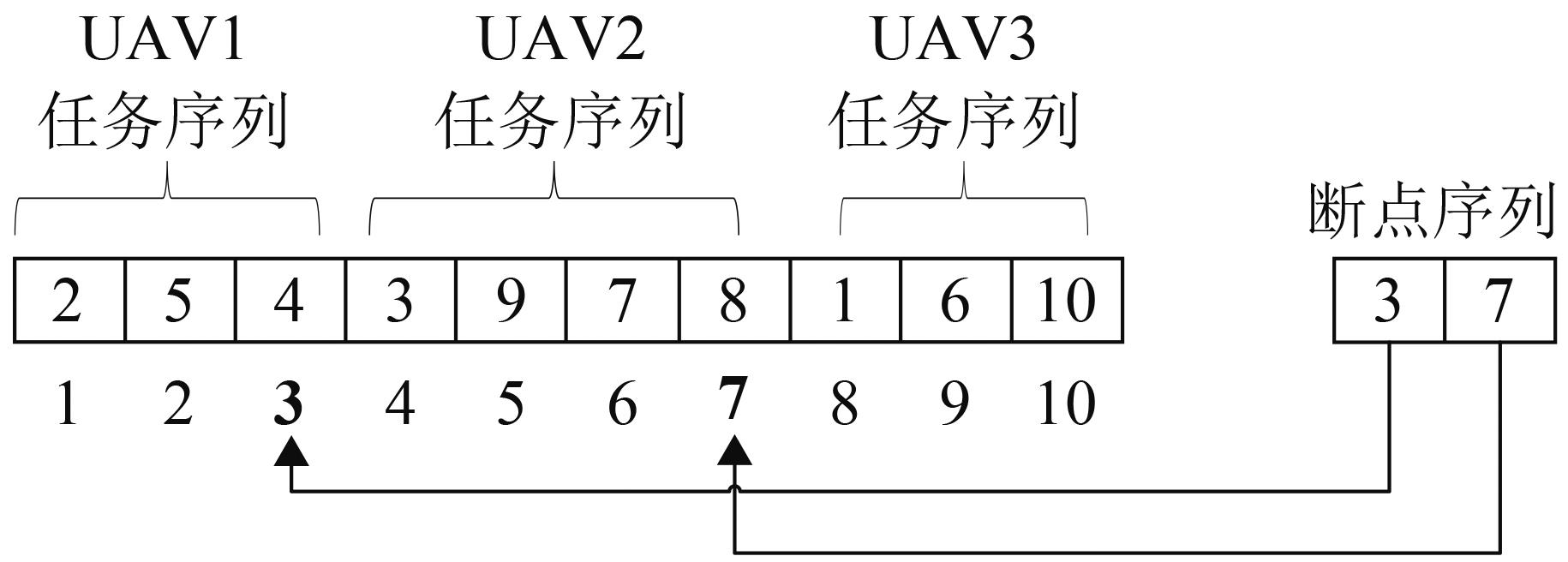
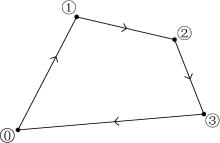
Fig. 5
Route diagram based on task sequence
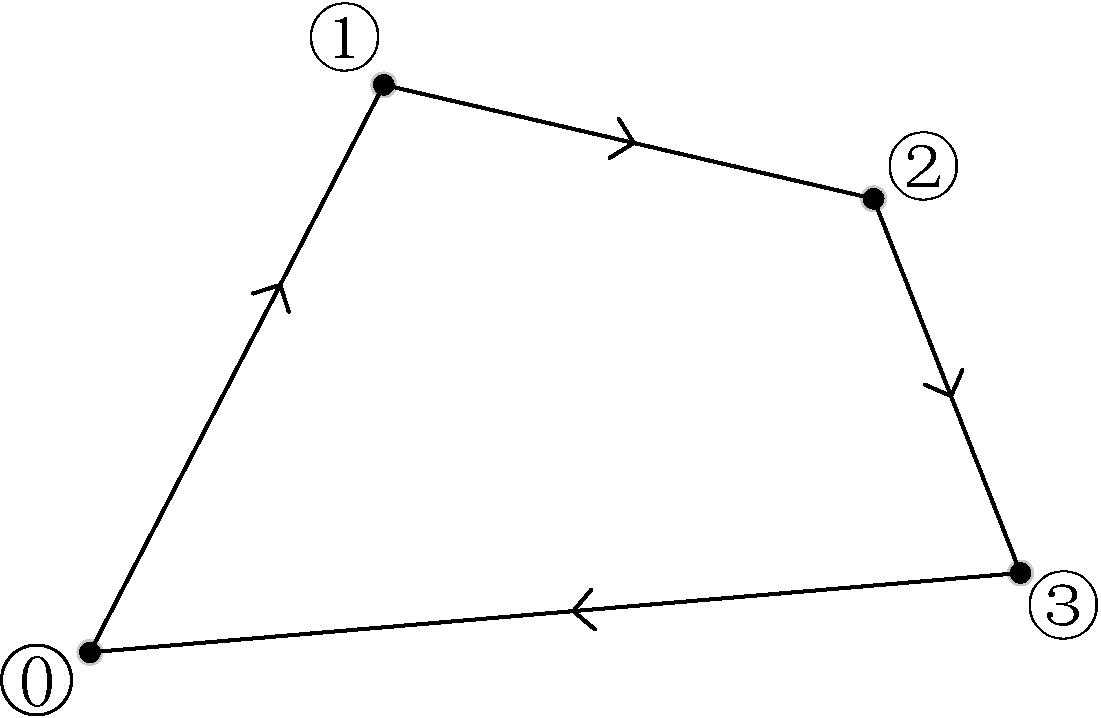
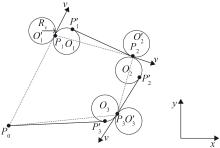
Fig. 6
Schematic diagram of route smoothing
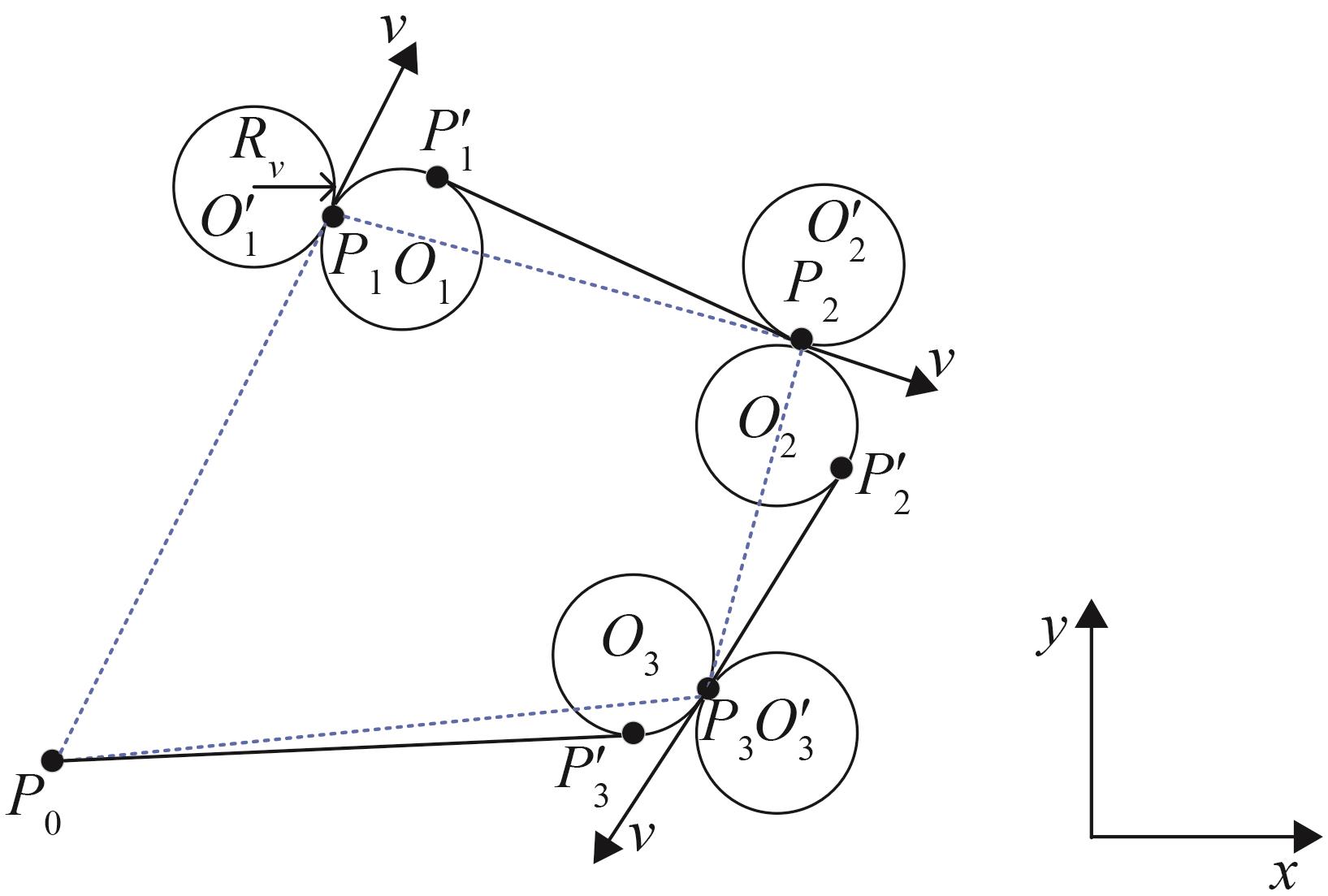

Fig. 7
Schematic diagram of Dubins path where there is a threat zone
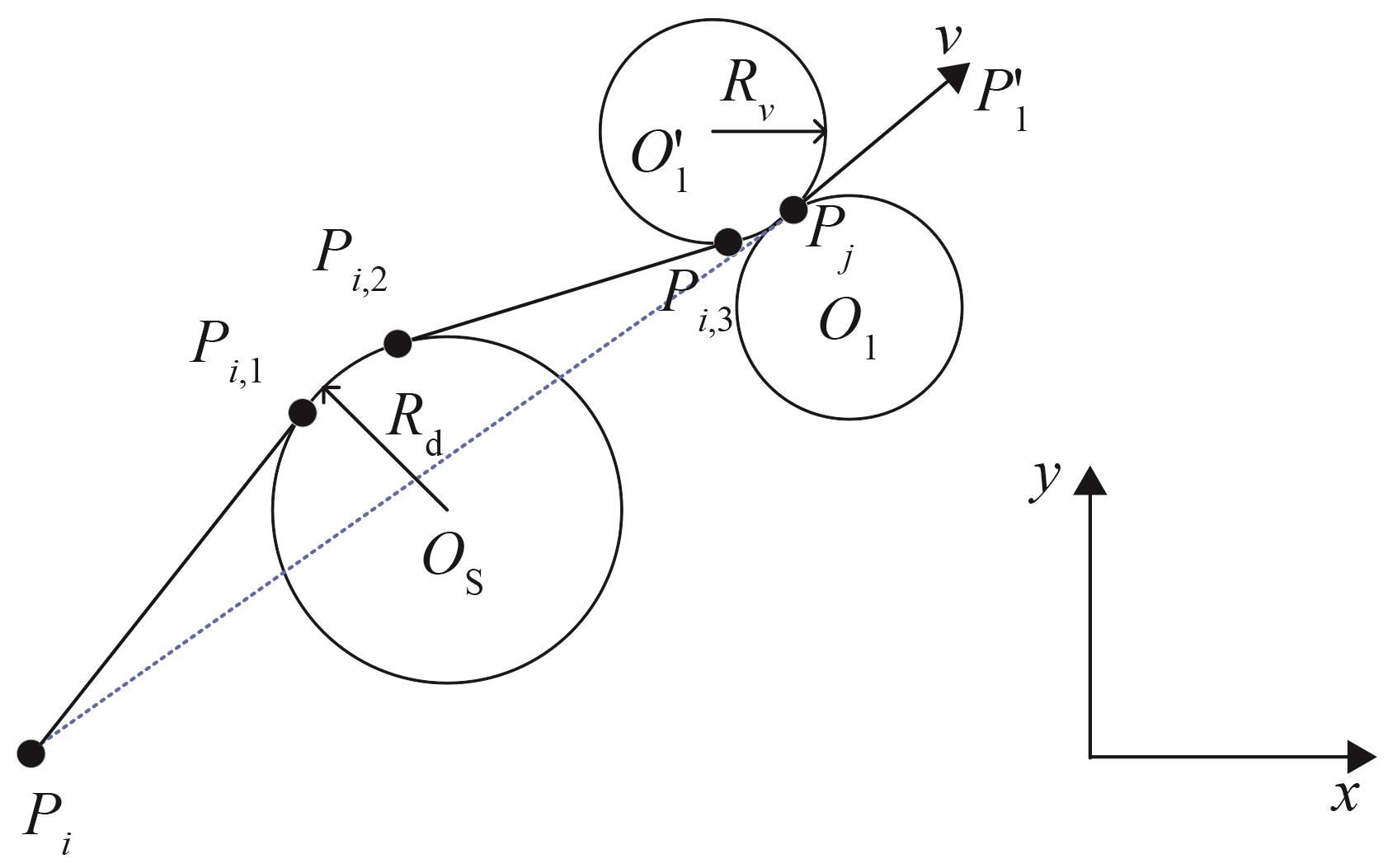
Fig. 8
Results of traditional clustering at 50 task points
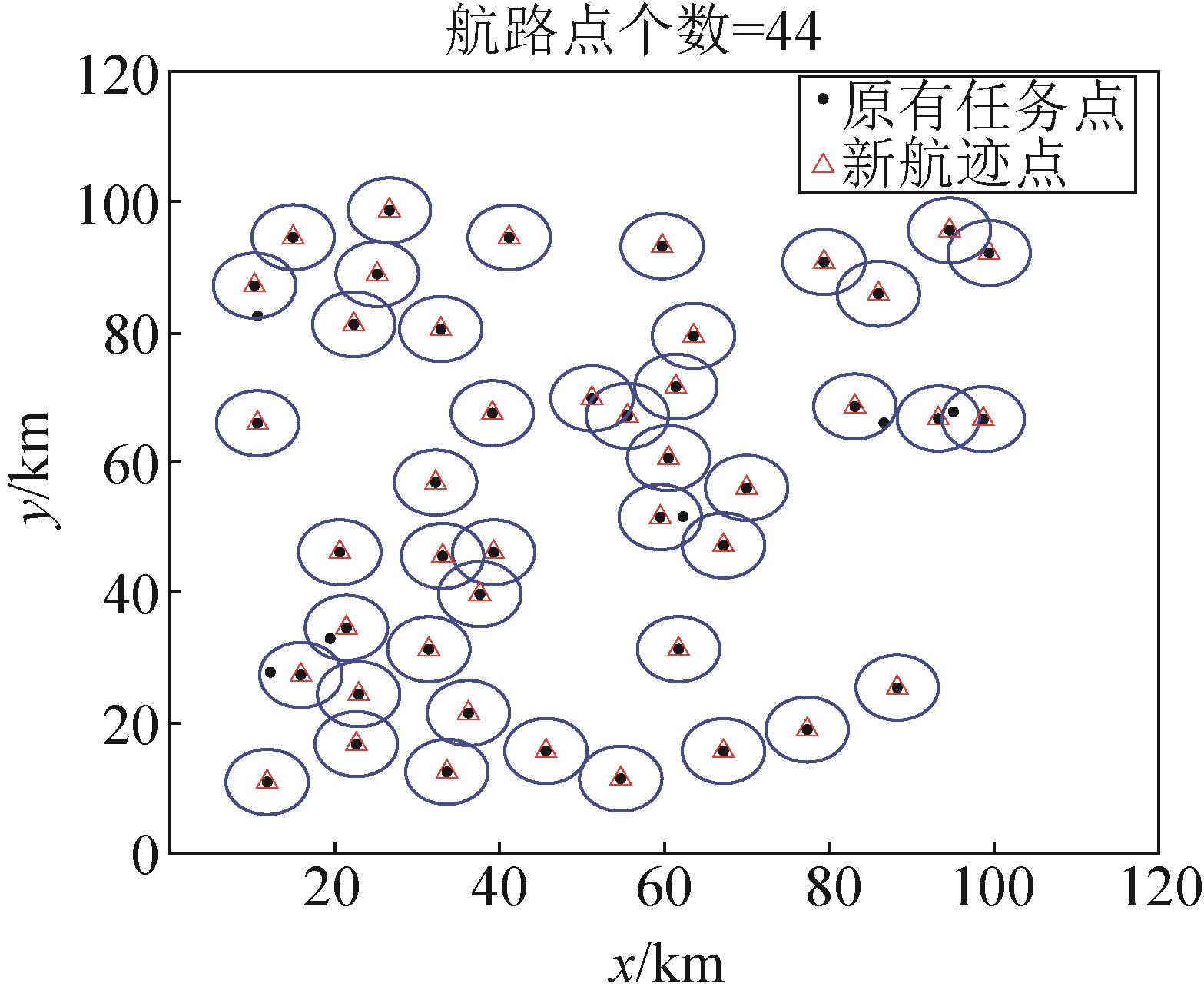
Fig. 9
Results of improved clustering at 50 task points
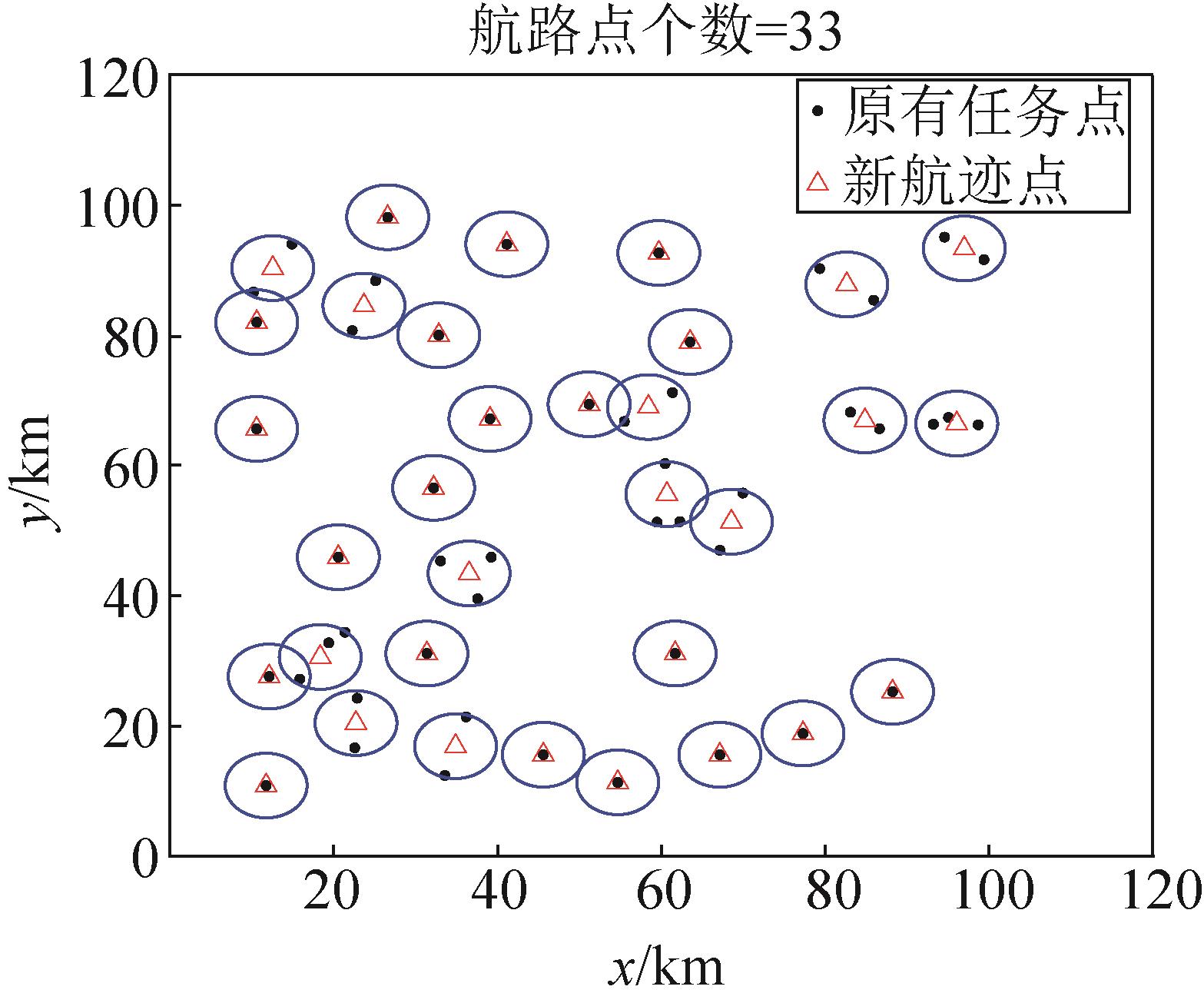
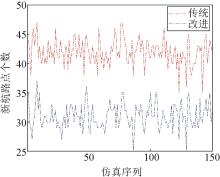
Fig. 10
Multiple comparisons of results for same number of tasks
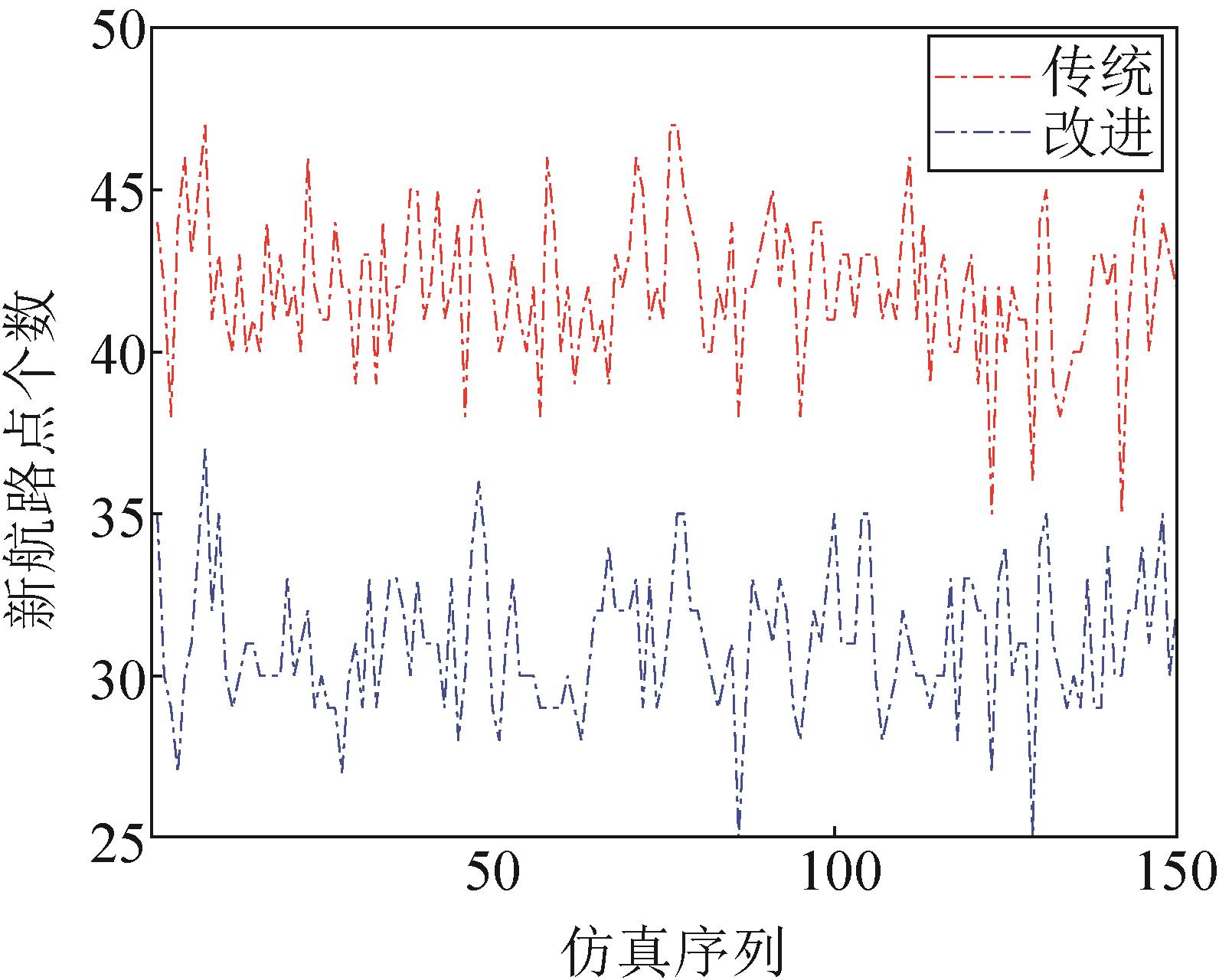
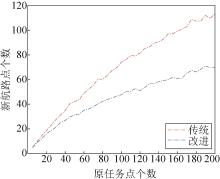
Fig. 11
Comparison of results under different number of tasks
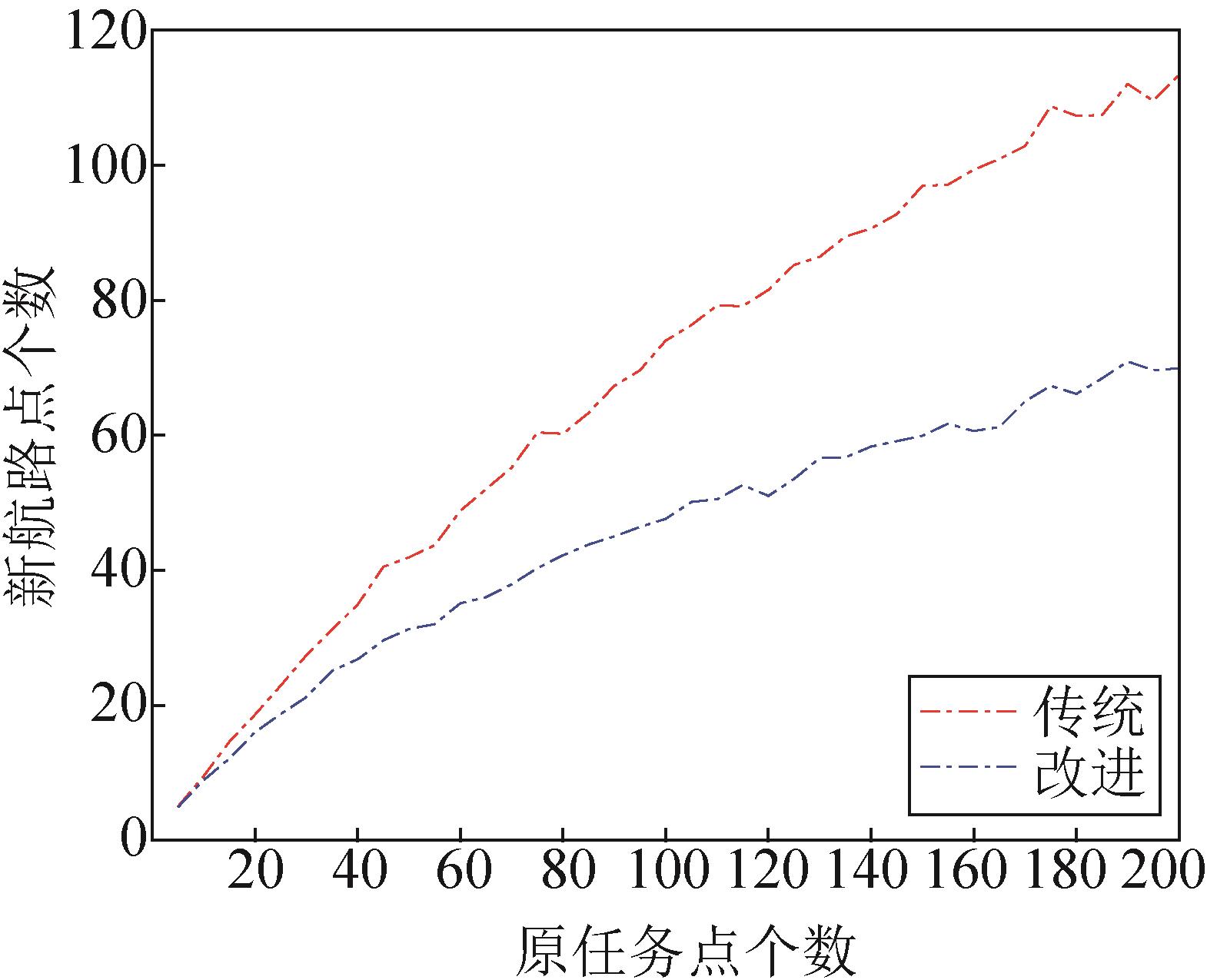
Table 1
UAV information
UAV 编号 | 坐标/ km | 速度/ ( | 探测半径/ | 最小转弯 半径/ |
|---|---|---|---|---|
| 1 | (30, 0) | 100 | 5 | 0.5 |
| 2 | (40, 0) | 100 | 5 | 0.5 |
| 3 | (50, 0) | 100 | 5 | 0.5 |
Table 2
Threat information
| 威胁编号 | 坐标 | |
|---|---|---|
| 1 | (30, 65) | 10 |
| 2 | (65, 45) | 10 |
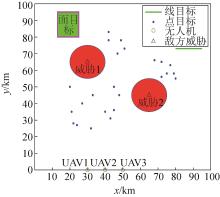
Fig. 12
Schematic diagram of mission area
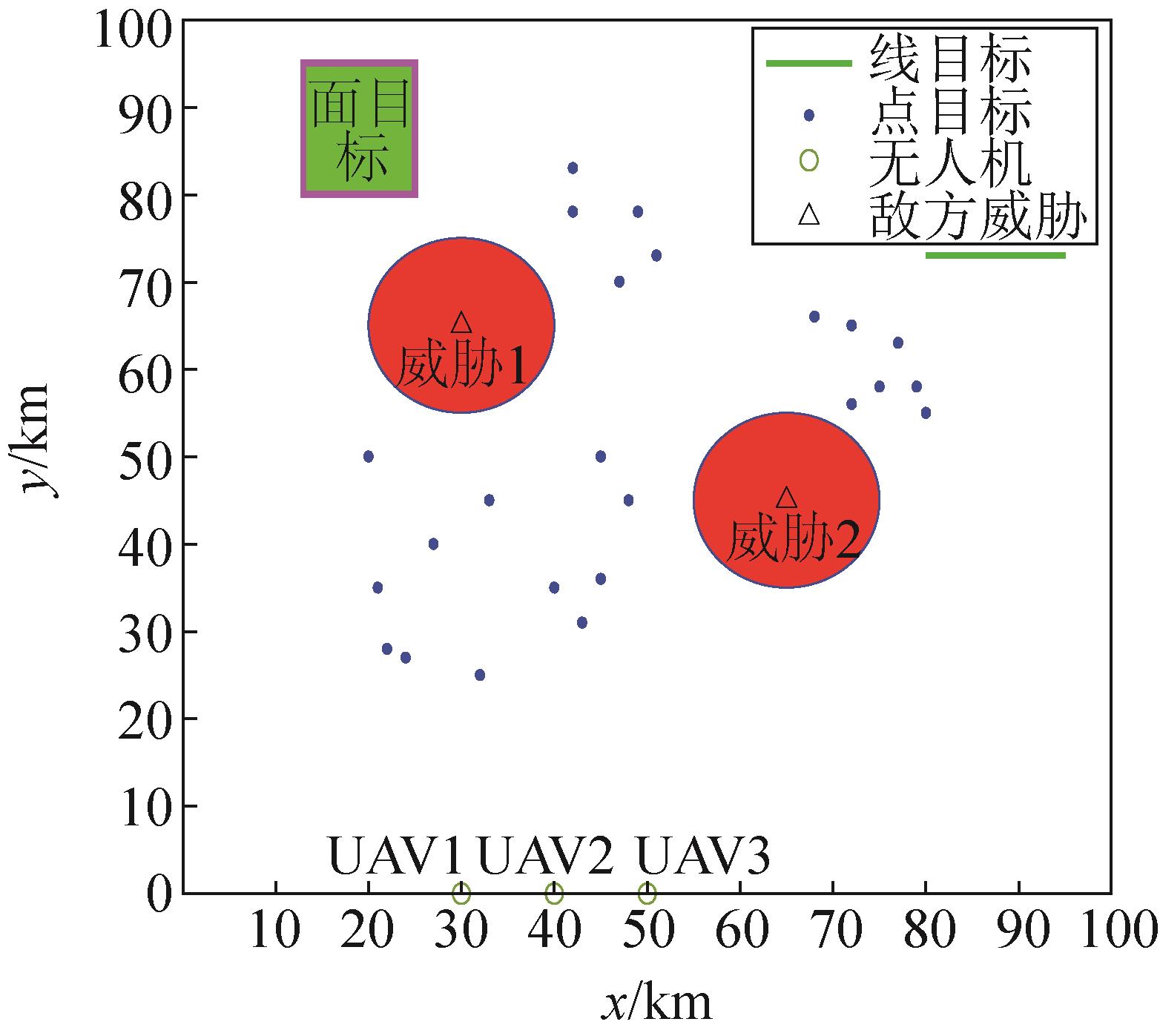
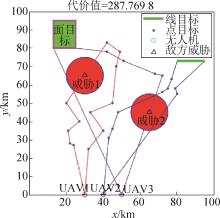
Fig. 13
Task sequence paths that do not consider collaborative route optimization
Fig. 14
The final paths that do not consider collaborative route optimization
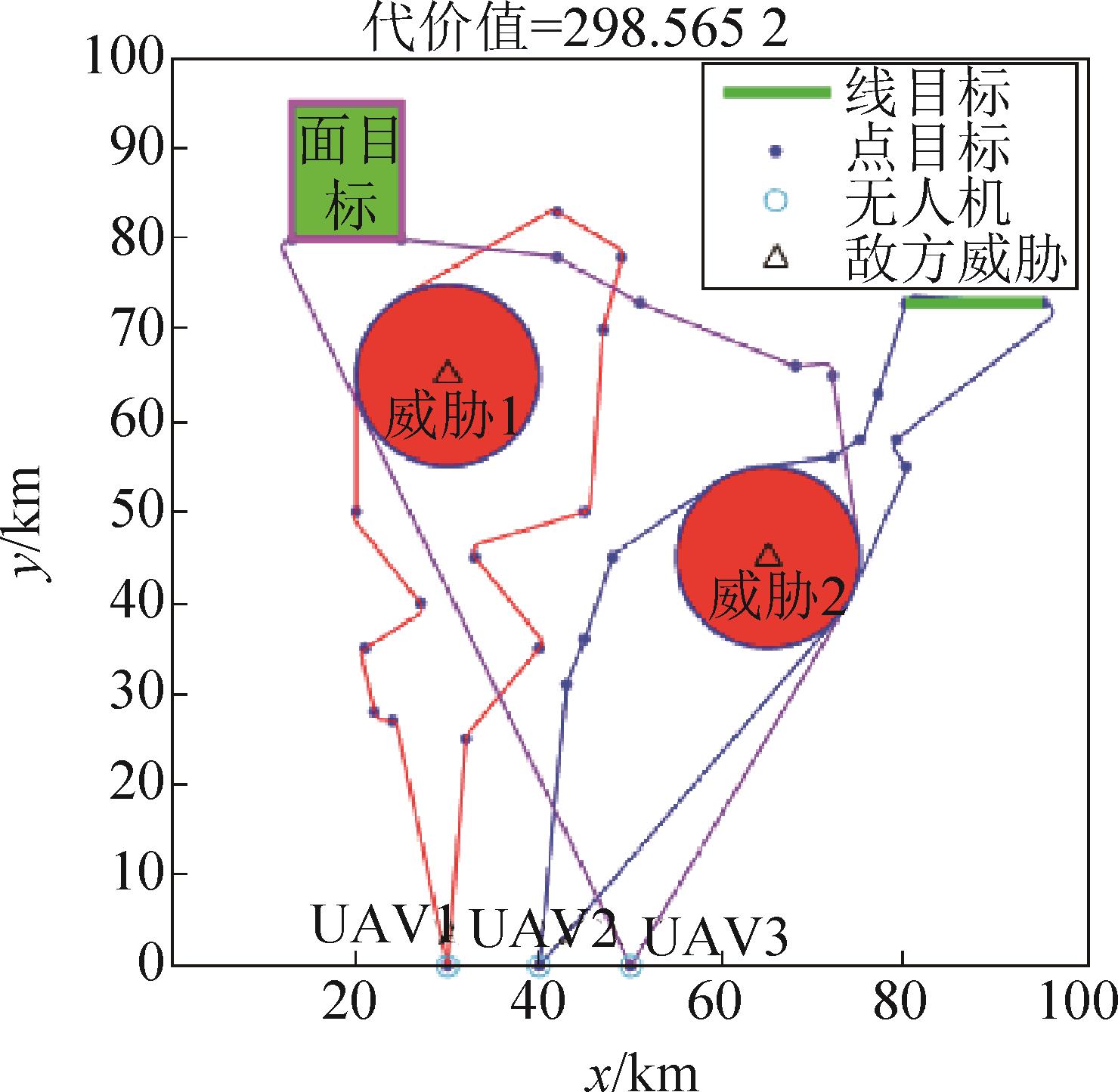
Fig. 15
Results of collaborative route optimization
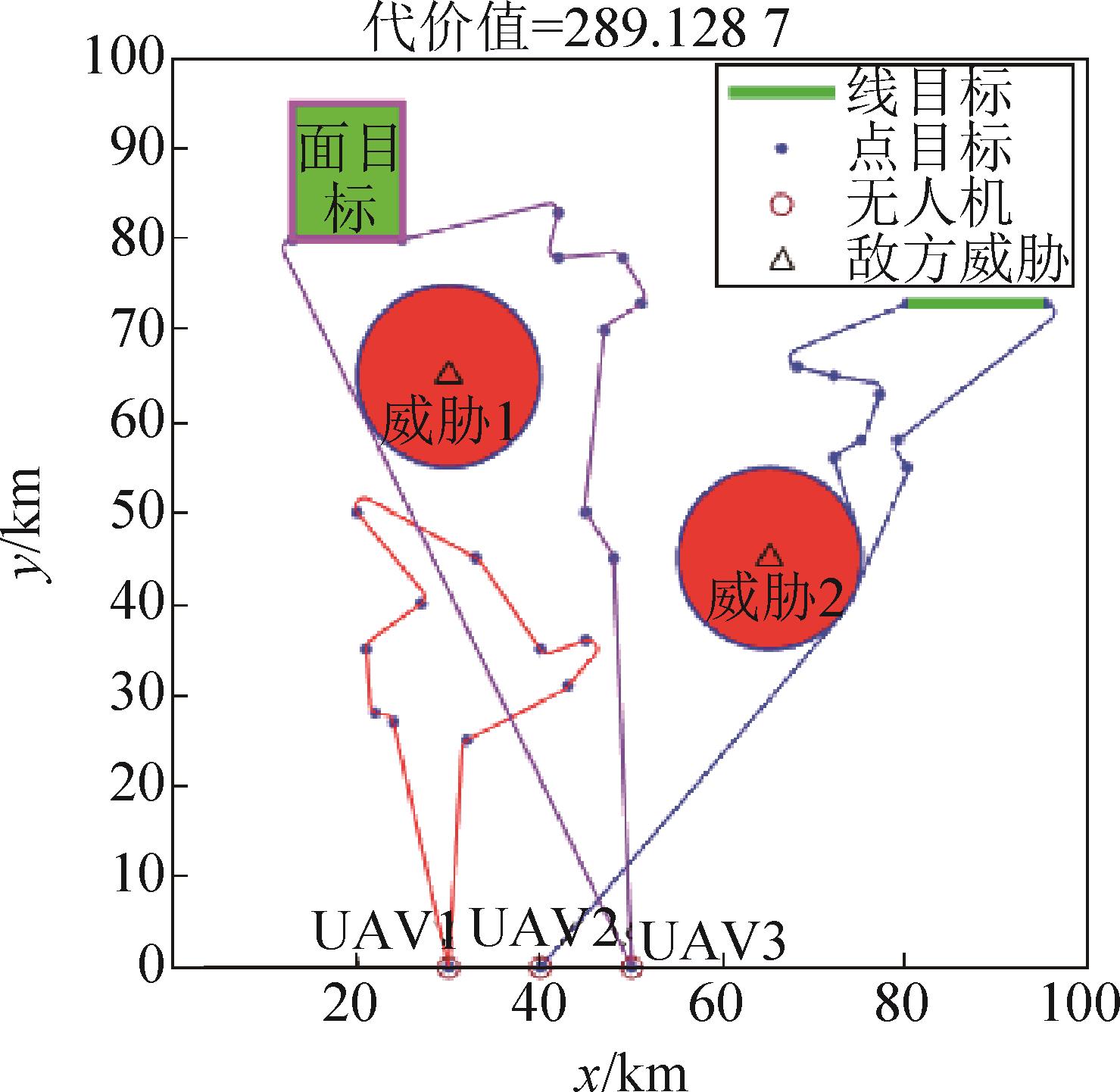
Fig. 16
Collaborative route optimization results with traditional cluster preprocessing
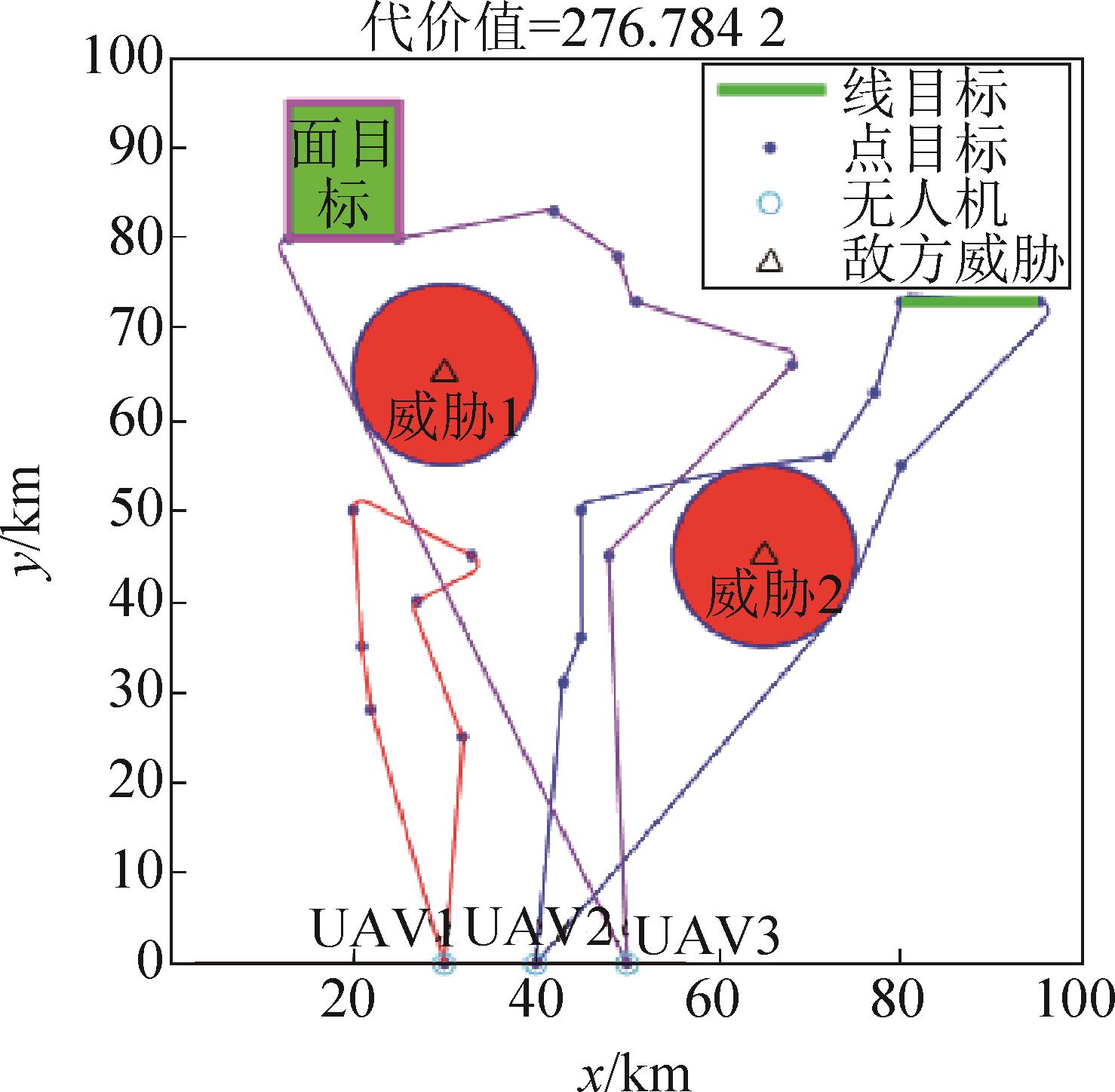
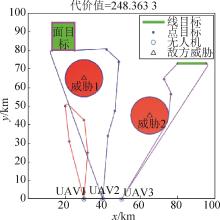
Fig. 17
Collaborative route optimization results with improved cluster preprocessing
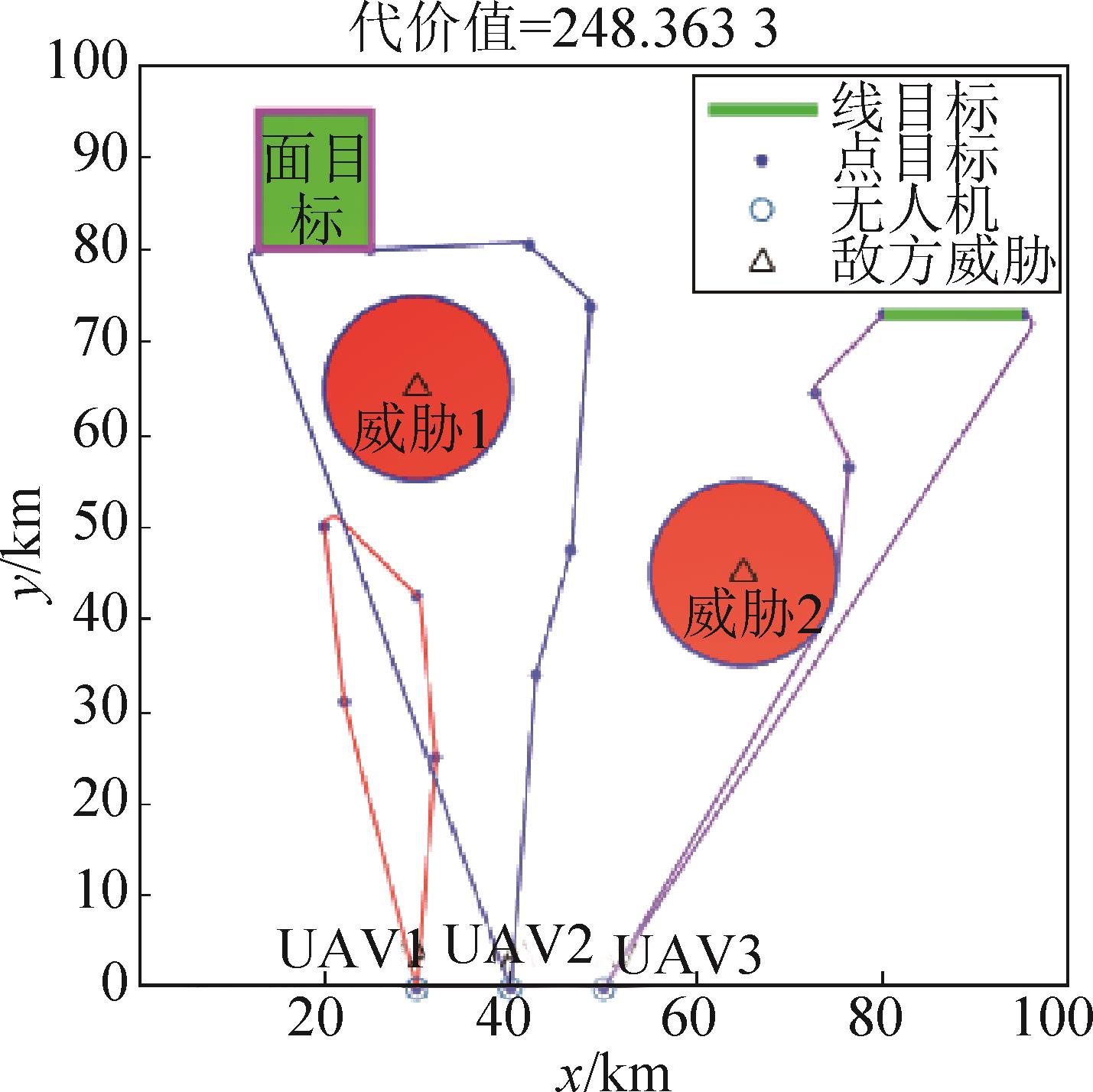
Fig. 18
Iterative process comparison
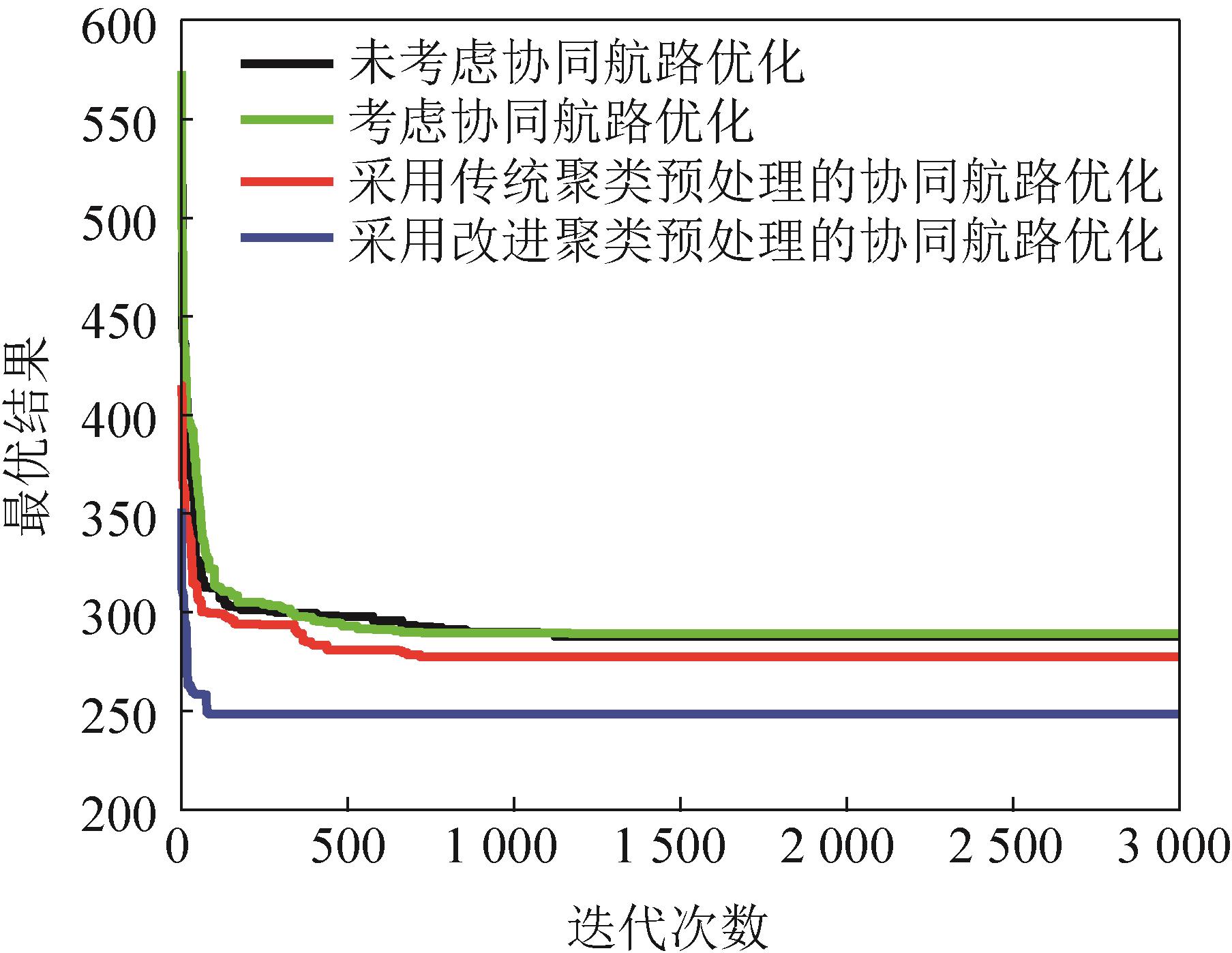
Table 3
Comparison of convergence speed and results of each algorithm
| 规划算法 | 平均收敛步数 | 平均实际代价值 | 规划结果与实际 结果的偏差/% | 与原有算法相比任务 代价值降低/% |
|---|---|---|---|---|
| 未考虑协同优化 | 1 858 | 298.1 | 3.7 | 0 |
| 考虑协同优化 | 1 876 | 288.7 | 0 | 3.2 |
| 基于传统聚类法预处理的协同优化 | 1 240 | 275.7 | 0 | 7.5 |
| 基于改进聚类法预处理的协同优化 | 404 | 251.2 | 0 | 15.7 |
| 1 | 李文, 陈建. 有人机/无人机混合编队协同作战研究综述与展望[J]. 航天控制, 2017, 35(3): 90-96. |
| Li Wen, Chen Jian. Review and Prospect of Cooperative Combat of Manned/Unmanned Aerial Vehicle Hybrid Formation[J]. Aerospace Control, 2017, 35(3): 90-96. | |
| 2 | Gama Ricardo, Fernandes Hugo L. A Reinforcement Learning Approach to the Orienteering Problem with Time Windows[J]. Computers & Operations Research, 2021, 133: 105357. |
| 3 | Luo Zhihao, Poon Mark, Zhang Zhenzhen, et al. The Multi-visit Traveling Salesman Problem with Multi-drones[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103172. |
| 4 | Temesgen Seyoum Alemayehu, Hoon Kim Jai. Efficient Nearest Neighbor Heuristic TSP Algorithms for Reducing Data Acquisition Latency of UAV Relay WSN[J]. Wireless Personal Communications, 2017, 95(3): 3271-3285. |
| 5 | 金仙力, 李金刚. 基于遗传算法的多目标路径优化算法的研究[J]. 计算机技术与发展, 2018, 28(2): 54-58. |
| Jin Xianli, Li Jingang. Research on Multi-target Path Optimization Algorithm Based on Genetic Algorithm[J]. Computer Technology and Development, 2018, 28(2): 54-58. | |
| 6 | 梁国伟, 王社伟, 赵雪森. 多无人机协同任务分配方法[J]. 火力与指挥控制, 2014, 39(11): 13-17. |
| Liang Guowei, Wang Shewei, Zhao Xuesen. Method Research on Cooperative Task Allocation for Multiple UCAVs[J]. Fire Control & Command Control, 2014, 39(11): 13-17. | |
| 7 | 郝会成, 姜维, 李一军, 等. 基于Multi-Agent敏捷卫星动态任务规划问题[J]. 国防科技大学学报, 2013, 35(1): 53-59. |
| Hao Huicheng, Jiang Wei, Li Yijun, et al. Research on Agile Satellite Dynamic Mission Planning Based on Multi-agent[J]. Journal of National University of Defense Technology, 2013, 35(1): 53-59. | |
| 8 | Rasmussen S J, Shima Tal. Tree Search Algorithm for Assigning Cooperating UAVs to Multiple Tasks[J]. International Journal of Robust and Nonlinear Control, 2008, 18(2): 135-153. |
| 9 | Chen Lizhi, Liu Weili, Zhong Jinghui. An Efficient Multi-objective Ant Colony Optimization for Task Allocation of Heterogeneous Unmanned Aerial Vehicles[J]. Journal of Computational Science, 2022, 58: 101545. |
| 10 | 刘超. 基于改进遗传算法的多无人机航路规划方法[J]. 火力与指挥控制, 2019, 44(1): 18-22. |
| Liu Chao. Method of Path Planning for Multi-UAV Based on Improved Genetic Algorithm[J]. Fire Control & Command Control, 2019, 44(1): 18-22. | |
| 11 | Liu Haoting, Ge Jianyue, Wang Yuan, et al. Multi-UAV Optimal Mission Assignment and Path Planning for Disaster Rescue Using Adaptive Genetic Algorithm and Improved Artificial Bee Colony Method[J]. Actuators, 2021, 11(1): 4. |
| 12 | 王然然, 魏文领, 杨铭超, 等. 考虑协同航路规划的多无人机任务分配[J]. 航空学报, 2020, 41(增2): 21-32. |
| Wang Ranran, Wei Wenling, Yang Mingchao, et al. Task Allocation of Multiple UAVs Considering Cooperative Route Planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 21-32. | |
| 13 | 潘登, 高东, 郑建华. 均衡聚类市场拍卖机制的异构无人机集群任务规划方法[J]. 国防科技大学学报, 2022, 44(6): 151-162. |
| Pan Deng, Gao Dong, Zheng Jianhua. Task Planning of Heterogeneous UAV Swarm Based on Balanced Clustering Market Auction Mechanism[J]. Journal of National University of Defense Technology, 2022, 44(6): 151-162. | |
| 14 | 朱创创, 梁晓龙, 何吕龙, 等. 群目标侦察航迹规划方法[J]. 火力与指挥控制, 2018, 43(1): 47-51. |
| Zhu Chuangchuang, Liang Xiaolong, He Lülong, et al. Group Target Reconnaissance Flight Planning Method[J]. Fire Control & Command Control, 2018, 43(1): 47-51. | |
| 15 | 龙国庆, 祝小平, 董世友. 基于聚类算法的多无人机系统任务分配[J]. 火力与指挥控制, 2011, 36(12): 54-59. |
| Long Guoqing, Zhu Xiaoping, Dong Shiyou. A Study on the Task Allocation Problem for Multi-UAV System Based on Clustering Algorithm[J]. Fire Control & Command Control, 2011, 36(12): 54-59. | |
| 16 | Ma Yunhong, Zhang Heng, Zhang Yaozhong, et al. Coordinated Optimization Algorithm Combining GA with Cluster for Multi-UAVs to Multi-tasks Task Assignment and Path Planning[C]//2019 IEEE 15th International Conference on Control and Automation (ICCA). Piscataway, NJ, USA: IEEE, 2019: 1026-1031. |
| 17 | 张富震, 朱耀琴. 复杂环境中多无人机协同侦察的任务分配方法[J]. 系统仿真学报, 2022, 34(10): 2293-2302. |
| Zhang Fuzhen, Zhu Yaoqin. Task Allocation Method for Multi-UAV Cooperative Reconnaissance in Complex Environment[J]. Journal of System Simulation, 2022, 34(10): 2293-2302. | |
| 18 | 李文广, 胡永江, 孙世宇, 等. 基于最小转弯半径的无人机转弯航迹规划算法[J]. 计算机工程与设计, 2019, 40(10): 2849-2854. |
| Li Wenguang, Hu Yongjiang, Sun Shiyu, et al. UAV Turning Path Planning Algorithm Based on Minimum Turning Radius[J]. Computer Engineering and Design, 2019, 40(10): 2849-2854. | |
| 19 | Zhou Honglu, Song Mingli, Pedrycz Witold. A Comparative Study of Improved GA and PSO in Solving Multiple Traveling Salesmen Problem[J]. Applied Soft Computing, 2018, 64: 564-580. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Yao Changhua, Bi Shanning, Ma Rufei, Yu Xiaohan, Li Jiaqiang, Chen Jinli. Method for Dynamic Coalition Formation of Wargame Agent for Force Cooperation [J]. Journal of System Simulation, 2025, 37(5): 1188-1196. |
| [15] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
