

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (3): 782-794.doi: 10.16182/j.issn1004731x.joss.23-0255
• Papers • Previous Articles
Yu Xiang( ), Jiang Chen(), Duan Sirui, Deng Qianrui
), Jiang Chen(), Duan Sirui, Deng Qianrui
Received:2023-03-06
Revised:2023-05-22
Online:2024-03-15
Published:2024-03-14
Contact:
Jiang Chen
E-mail:yuxiang@cqupt.edu.cn;1396916388@qq.com
CLC Number:
Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method[J]. Journal of System Simulation, 2024, 36(3): 782-794.
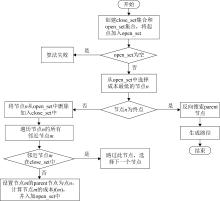
Fig. 1
Flow of original A* algorithm
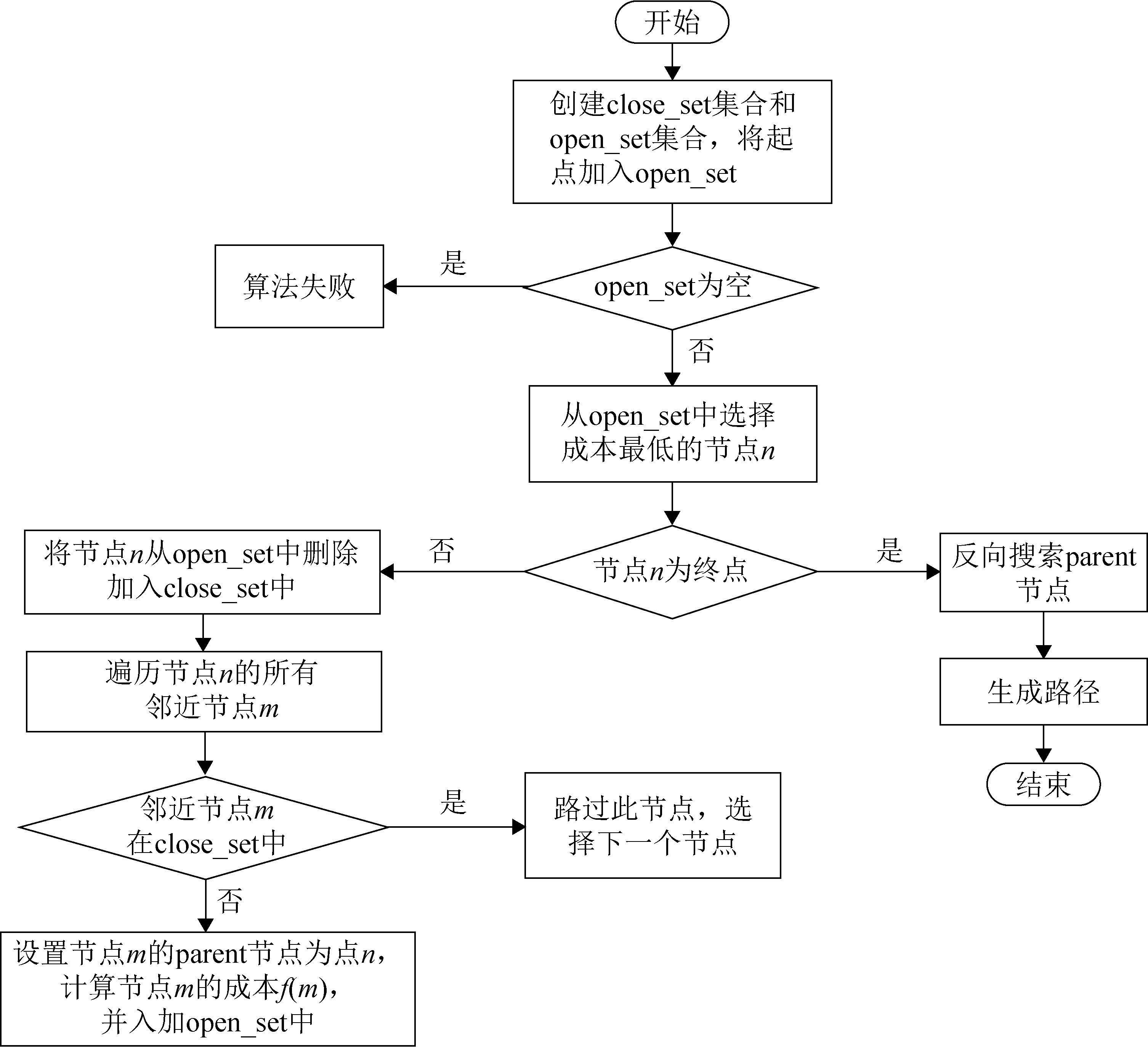
Fig. 2
Comparison of heuristic functions
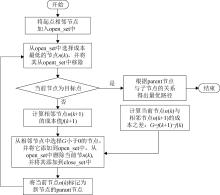
Fig. 3
Improved A* algorithm flow
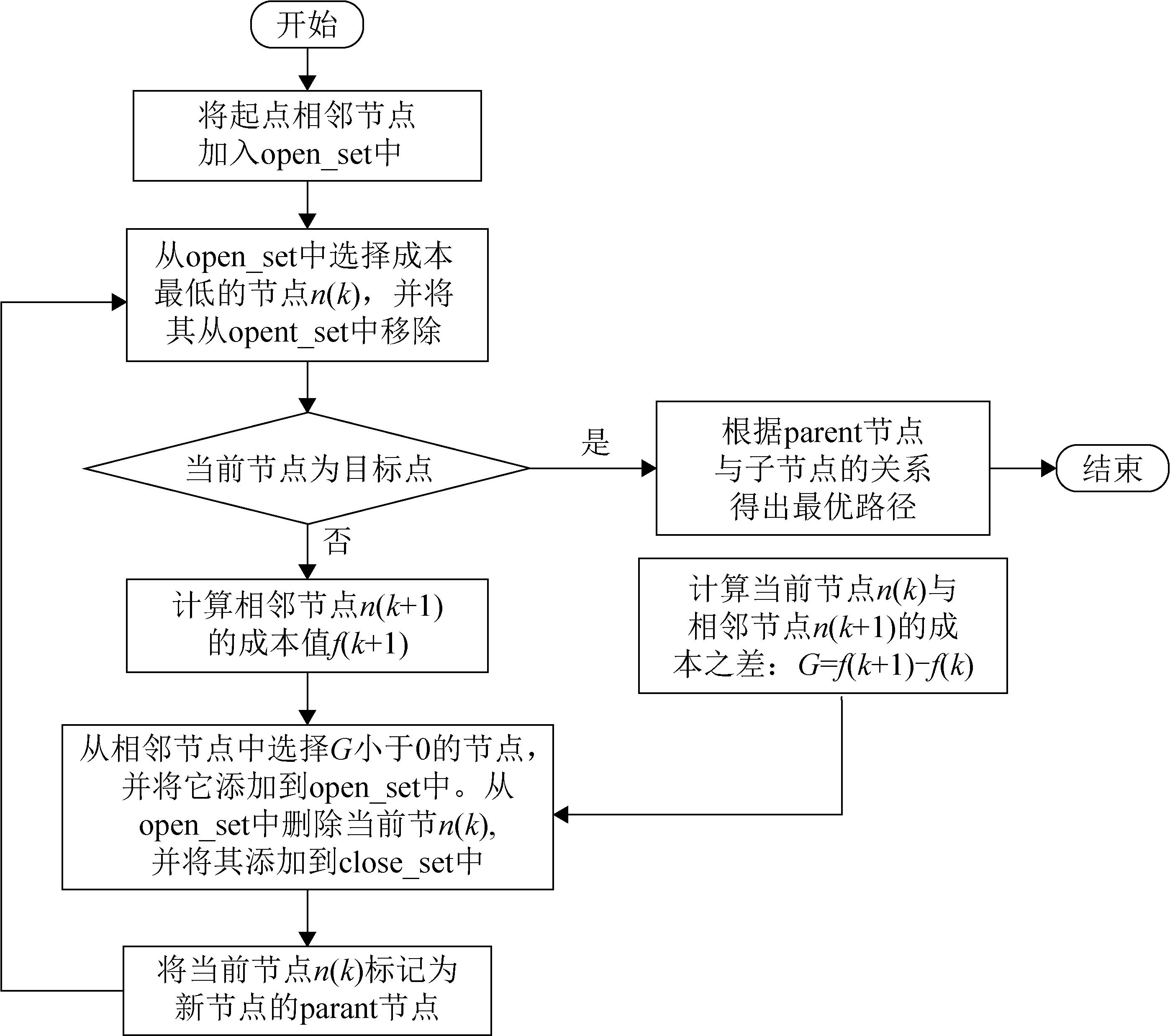

Fig. 4
Action of improved repulsion function on mobile robot
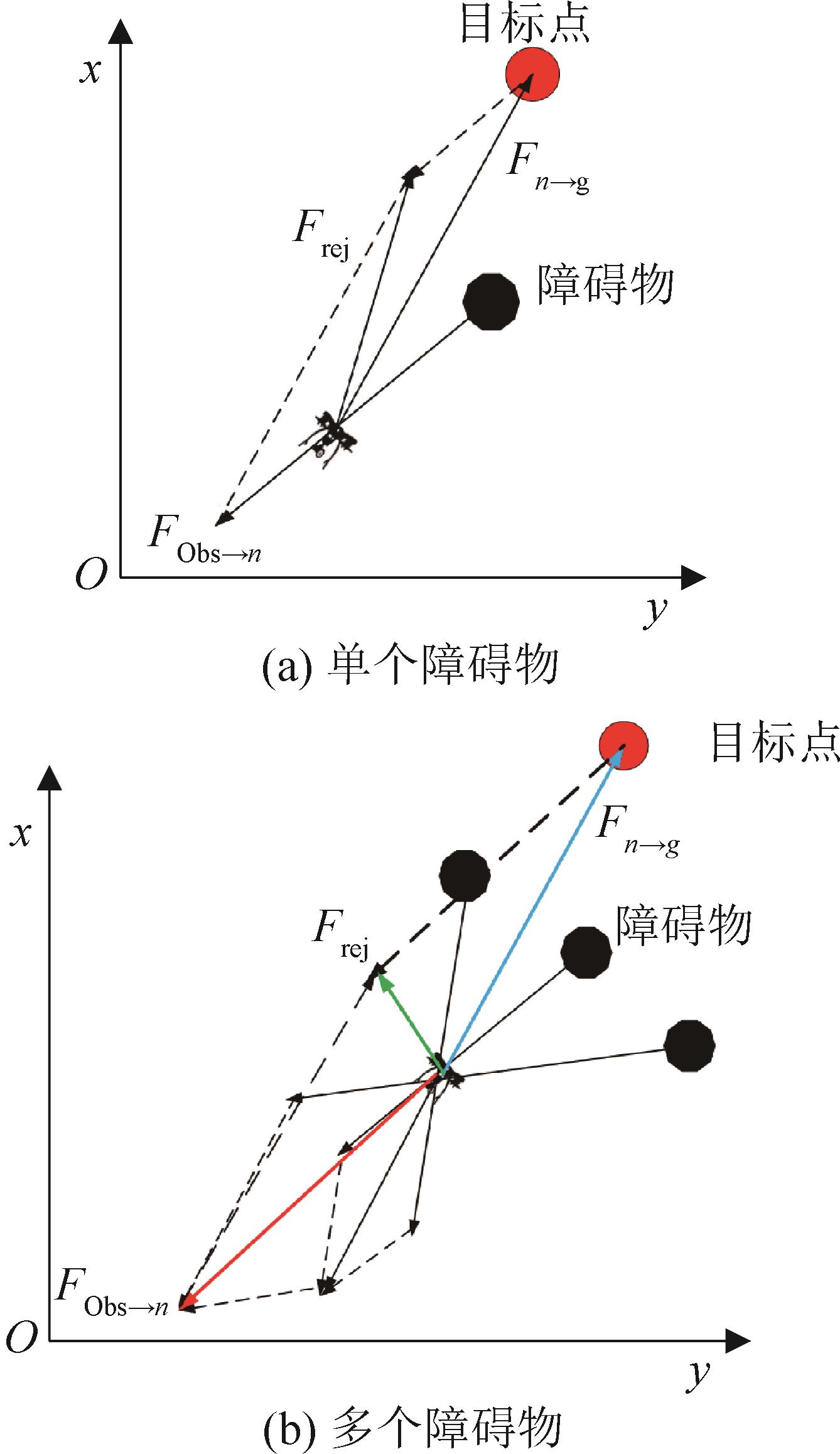
Fig. 5
Solution to a local problem
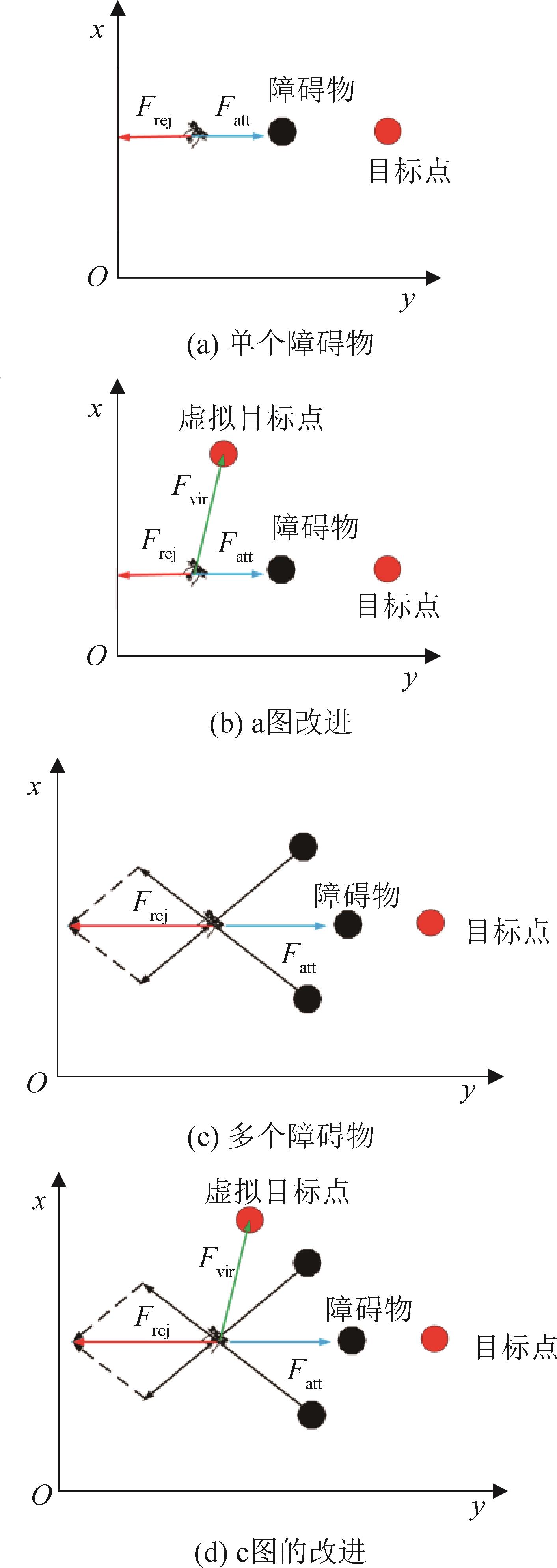
Fig. 6
Flow involving static obstacle avoidance
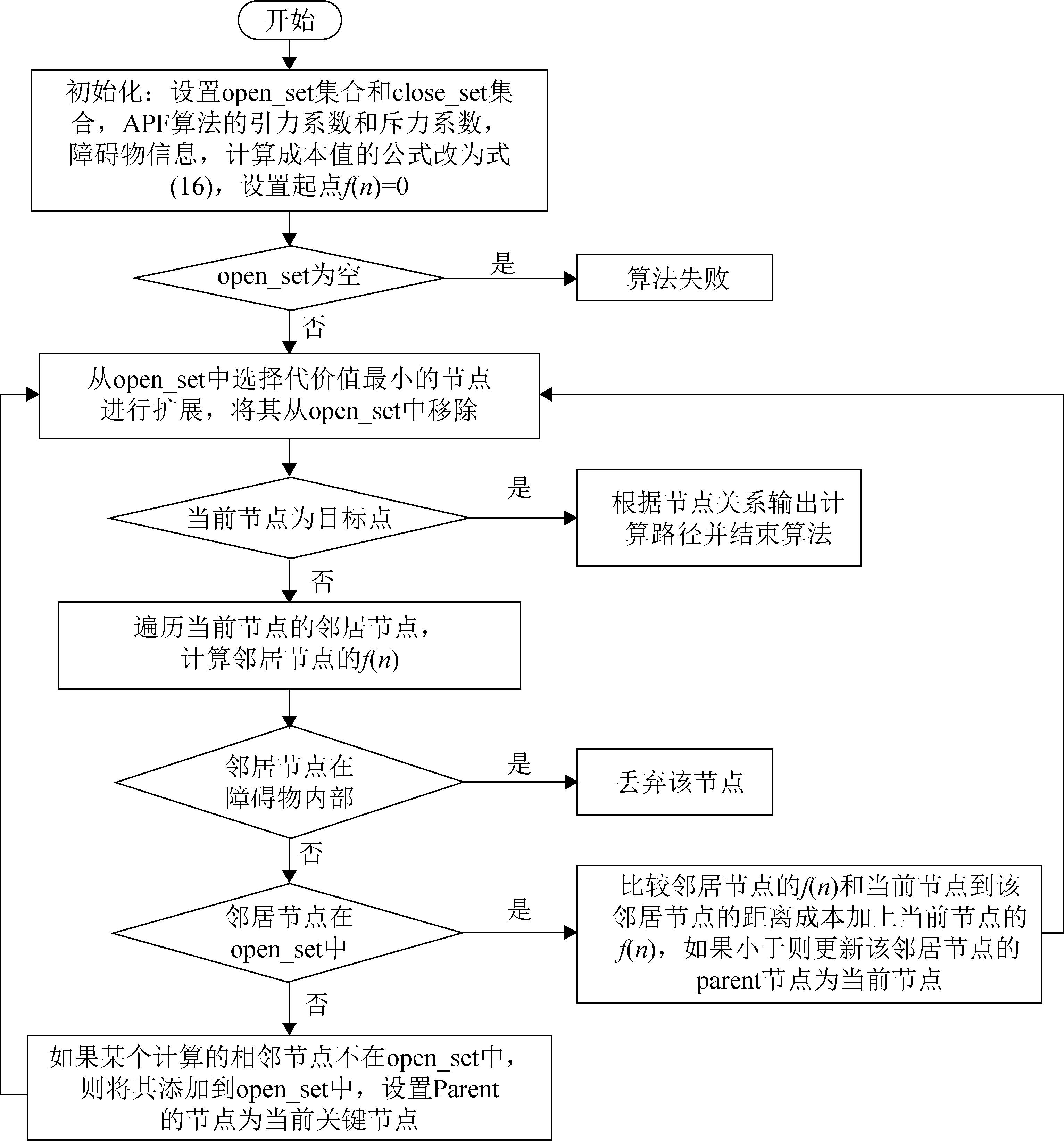
Fig. 7
Flow involving dynamic obstacle avoidance
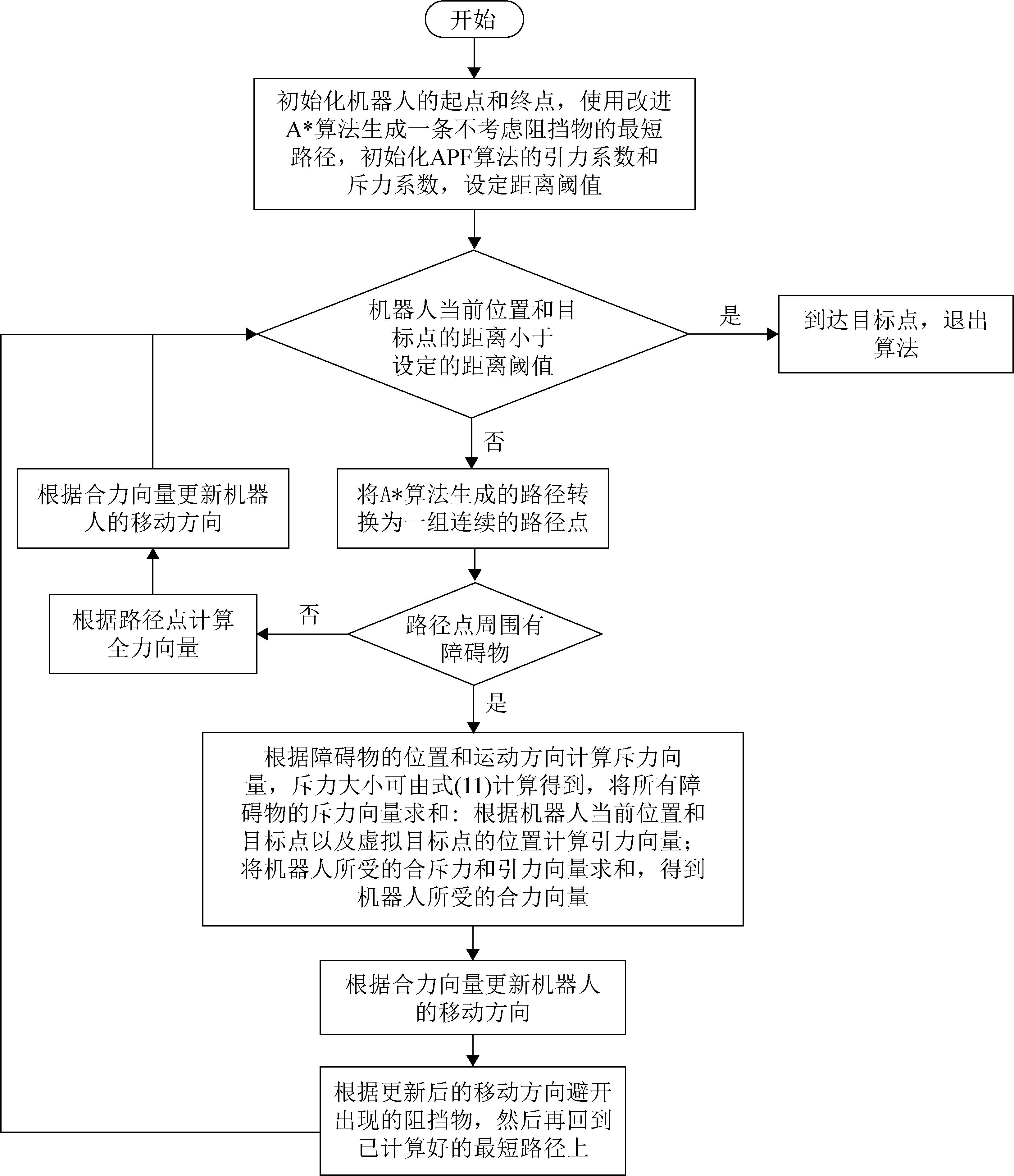
Table 1
Initialization parameters
| 参数 | 数值 |
|---|---|
| 斥力相关系数 | 0.8 |
| 引力比例系数 | 1.5 |
| 虚拟点引力系数 | 0.5 |
| 障碍物碰撞范围 | 1.8 |
| 机器人与目标点的 | 0.5 |
| 仿真步长 | 0.1 |
| 最大迭代次数 | 500 |
| 障碍物数量 | 34或8 |
| 目标点位置 | (23,24) |

Fig. 8
A* algorithm comparison
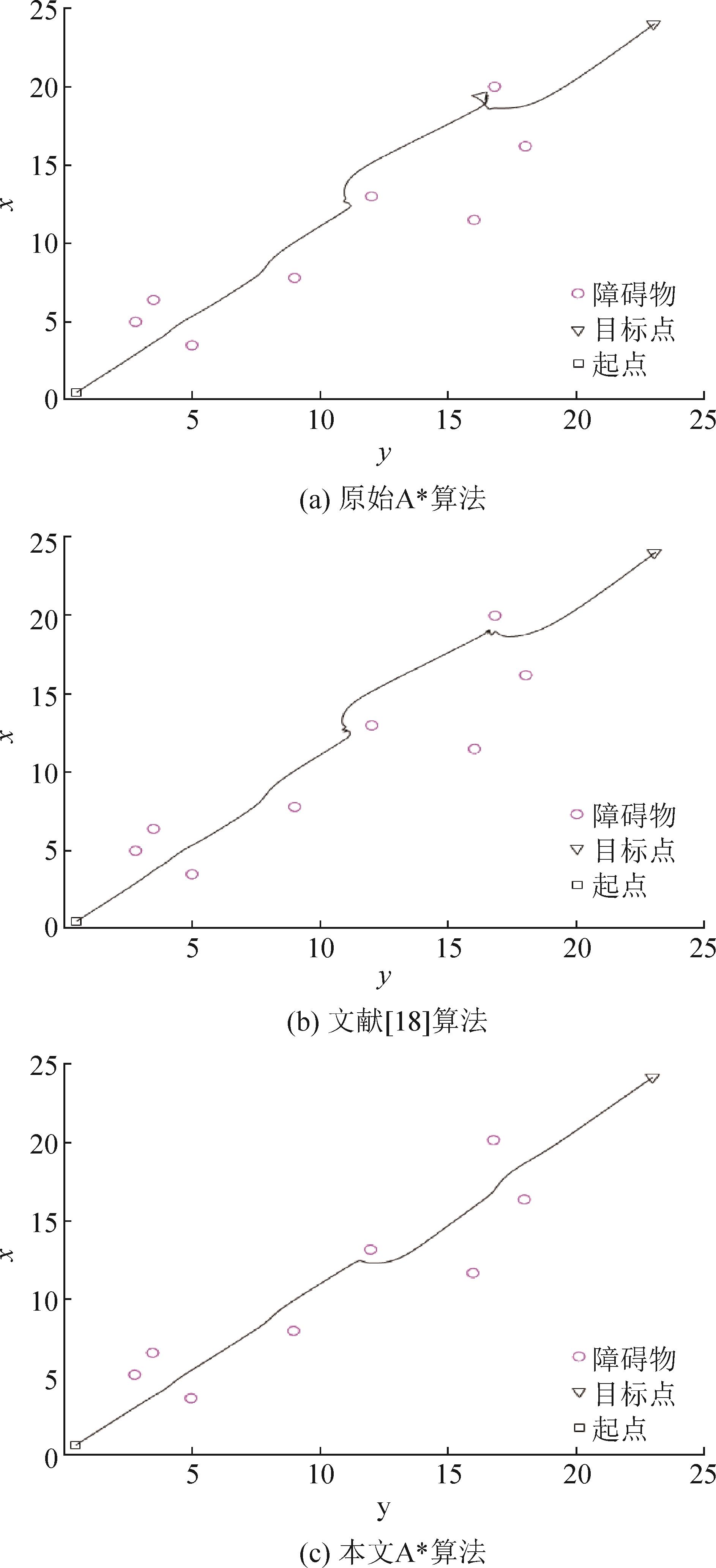
Table 2
Comparison of simulation data of A* algorithm
| 图例 | 路径长度 | 迭代次数 |
|---|---|---|
| 40.48 | 285 | |
| 35.13 | 231 | |
| 32.24 | 196 |
Fig. 9
APF algorithm comparison
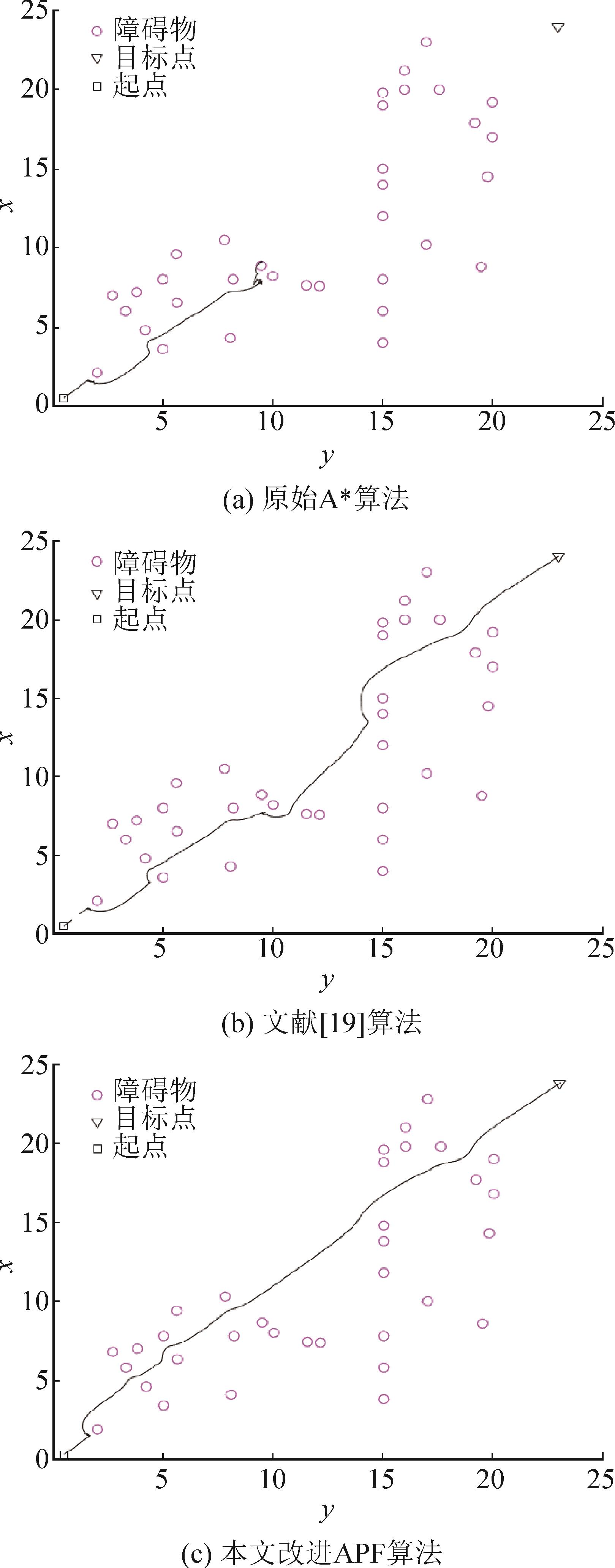
Table 3
Comparison of simulation data of APF algorithm
| 图例 | 路径长度 |
|---|---|
| 未到达 | |
| 39.03 | |
| 34.24 |

Fig. 10
Comparison of algorithms in literature [20]
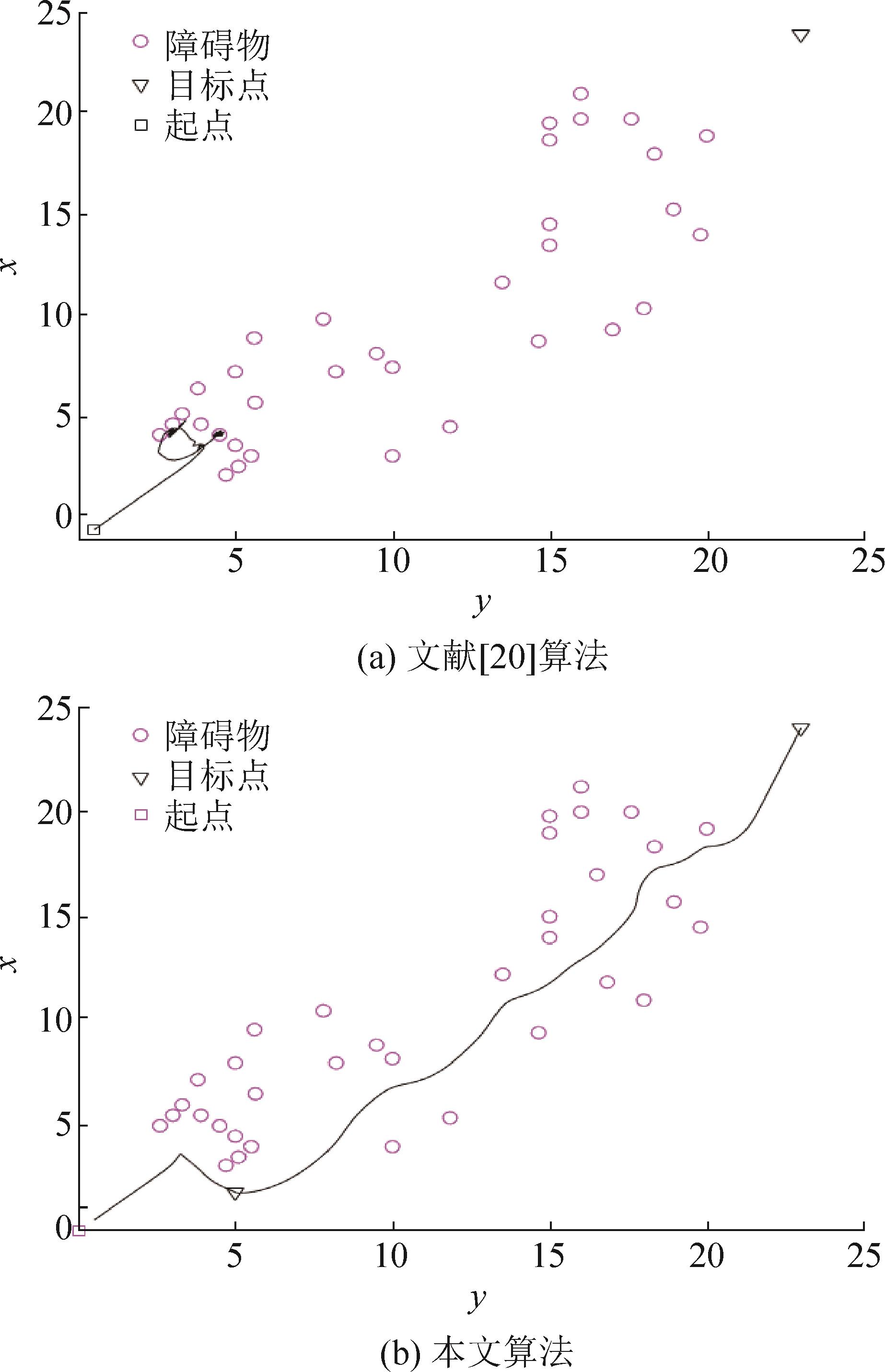
Table 4
Comparison of simulation data of algorithms in literature [20]
| 图例 | 路径长度 | 迭代次数 |
|---|---|---|
| 未到达 | 500 | |
| 42.69 | 313 |
Table 5
Initialization parameters
| 参数 | 数值 |
|---|---|
| 斥力相关系数 | 0.75 |
| 引力比例系数 | 1.5 |
| 虚拟点引力系数 | 0.5 |
| 障碍物碰撞范围 | 2 |
| 机器人与目标点的 | 0.5 |
| 仿真步长 | 0.1 |
| 动态障碍物数量 | 7 |
| 静态障碍物数量 | 17 |
| 目标点位置 | (10,10) |

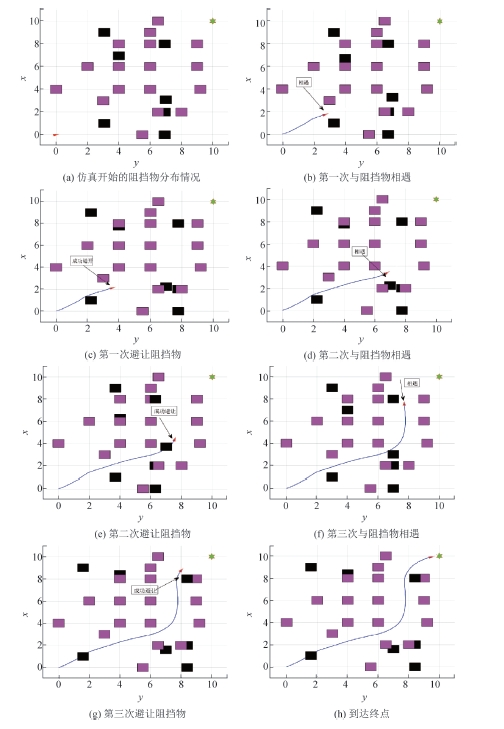
Fig. 11
Simulation results of dynamic obstacle avoidance
| 1 | 张树生, 裴文良, 孙宁, 等. 消防灭火侦察机器人的研制与应用[J]. 制造业自动化, 2016, 38(6): 55-58. |
| Zhang Shusheng, Pei Wenliang, Sun Ning, et al. Development and Application of Fire Fighting Reconnaissance Robot[J]. Manufacturing Automation, 2016, 38(6): 55-58. | |
| 2 | Shakhatreh Hazim, Sawalmeh Ahmad H, Al-Fuqaha A, et al. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges[J]. IEEE Access, 2019, 7: 48572-48634. |
| 3 | Han Jinlu, Xu Yaojin, Di Long, et al. Low-cost Multi-UAV Technologies for Contour Mapping of Nuclear Radiation Field[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1): 401-410. |
| 4 | 杨艳红, 钟宝江, 田宏伟. DS-YOLOv4-tiny救援机器人目标检测模型[J]. 计算机仿真, 2022, 39(1): 387-393. |
| Yang Yanhong, Zhong Baojiang, Tian Hongwei. Target Detection Model of DS-YOLOv4-tiny Rescue Robot[J]. Computer Simulation, 2022, 39(1): 387-393. | |
| 5 | 余翔, 邓千锐, 段思睿, 等. 一种多无人机协同优先覆盖搜索算法[J/OL]. 系统仿真学报. (2023-03-15) [2023-04-19]. . |
| Yu Xiang, Deng Qianrui, Duan Sirui, et al. A Multi-UAV Cooperative Priority Coverage Search Algorithm[J/OL]. Journal of System Simulation. (2023-03-15) [2023-04-19]. . | |
| 6 | 林韩熙, 向丹, 欧阳剑, 等. 移动机器人路径规划算法的研究综述[J]. 计算机工程与应用, 2021, 57(18): 38-48. |
| Lin Hanxi, Xiang Dan, Ouyang Jian, et al. Review of Path Planning Algorithms for Mobile Robots[J]. Computer Engineering and Applications, 2021, 57(18): 38-48. | |
| 7 | Chhikara Prateek, Tekchandani Rajkumar, Kumar Neeraj, et al. DCNN-GA: A Deep Neural Net Architecture for Navigation of UAV in Indoor Environment[J]. IEEE Internet of Things Journal, 2021, 8(6): 4448-4460. |
| 8 | 王东署, 赵红燕. 移动机器人动态避障的调节发育学习[J]. 控制与决策, 2023, 38(11): 3112-3120. |
| Wang Dongshu, Zhao Hongyan. Motivated Developmental Learning of Mobile Robots in Dynamic Collision-avoidance[J]. Control and Decision, 2023, 38(11): 3112-3120. | |
| 9 | Gao Fei, Wang Luqi, Zhou Boyu, et al. Teach-repeat-replan: A Complete and Robust System for Aggressive Flight in Complex Environments[J]. IEEE Transactions on Robotics, 2020, 36(5): 1526-1545. |
| 10 | Yang Xin, Chen Jingyu, Dang Yuanjie, et al. Fast Depth Prediction and Obstacle Avoidance on a Monocular Drone Using Probabilistic Convolutional Neural Network[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(1): 156-167. |
| 11 | Hong Dooyoung, Lee Seonhoon, Hoo Cho Young, et al. Energy-efficient Online Path Planning of Multiple Drones Using Reinforcement Learning[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9725-9740. |
| 12 | 罗强, 王海宝, 崔小劲, 等. 改进人工势场法自主移动机器人路径规划[J]. 控制工程, 2019, 26(6): 1091-1098. |
| Luo Qiang, Wang Haibao, Cui Xiaojin, et al. Autonomous Mobile Robot Path Planning Based on Improved Artificial Potential Method[J]. Control Engineering of China, 2019, 26(6): 1091-1098. | |
| 13 | 翁理国, 纪壮壮, 夏旻, 等. 基于改进多目标粒子群算法的机器人路径规划[J]. 系统仿真学报, 2014, 26(12): 2892-2898. |
| Weng Liguo, Ji Zhuangzhuang, Xia Min, et al. Robot Path Planning Based on Improved Multi-objective Particle Swarm[J]. Journal of System Simulation, 2014, 26(12): 2892-2898. | |
| 14 | 江明, 王飞, 葛愿, 等. 基于改进蚁群算法的移动机器人路径规划研究[J]. 仪器仪表学报, 2019, 40(2): 113-121. |
| Jiang Ming, Wang Fei, Ge Yuan, et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Chinese Journal of Scientific Instrument, 2019, 40(2): 113-121. | |
| 15 | Xiong Xiaoyong, Min Haitao, Yu Yuanbin, et al. Application Improvement of A* Algorithm in Intelligent Vehicle Trajectory Planning[J]. Mathematical Biosciences and Engineering, 2021, 18(1): 1-21. |
| 16 | Montiel Oscar, Sepúlveda Roberto, Orozco-Rosas Ulises. Optimal Path Planning Generation for Mobile Robots Using Parallel Evolutionary Artificial Potential Field[J]. Journal of Intelligent & Robotic Systems, 2015, 79(2): 237-257. |
| 17 | Zhang Wei, Wei Shilin, Zeng Jia, et al. Multi-UUV Path Planning Based on Improved Artificial Potential Field Method[J]. International Journal of Robotics & Automation, 2021, 36(4): 231-239. |
| 18 | 王彬, 聂建军, 李海洋, 等. 优化A*与动态窗口法的移动机器人路径规划[J/OL]. 计算机集成制造系统. (2022-03-08) [2023-05-04]. . |
| Wang Bin, Nie Jianjun, Li Haiyang, et al. Optimization of A* and Dynamic Window Method for Mobile Robot Path Planning[J/OL]. Computer Integrated Manufacturing Systems. (2022-03-08) [2023-05-04]. . | |
| 19 | Wu Zhengtian, Dai Jinyu, Jiang Baoping, et al. Robot Path Planning Based on Artificial Potential Field with Deterministic Annealing[J]. ISA Transactions, 2023, 138: 74-87. |
| 20 | 周克帅, 范平清. 改进A*算法与人工势场算法移动机器人路径规划[J]. 电子器件, 2021, 44(2): 368-374. |
| Zhou Keshuai, Fan Pingqing. Improved A* Algorithm and Artificial Potential Field Algorithm for Mobile Robot Path Planning[J]. Chinese Journal of Electron Devices, 2021, 44(2): 368-374. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [15] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
