

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (4): 895-909.doi: 10.16182/j.issn1004731x.joss.23-1535
• Papers • Previous Articles Next Articles
Li Min1, Zhang Sen2, Zeng Xiangguang1, Wang Gang3, Zhang Tongwei2, Xie Dijie1, Ren Wenzhe1, Zhang Tao1
Received:2023-12-15
Revised:2024-02-27
Online:2025-04-17
Published:2025-04-16
CLC Number:
Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2025, 37(4): 895-909.
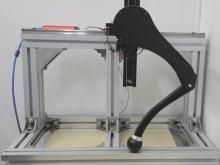
Fig. 1
Four-legged robot with single leg
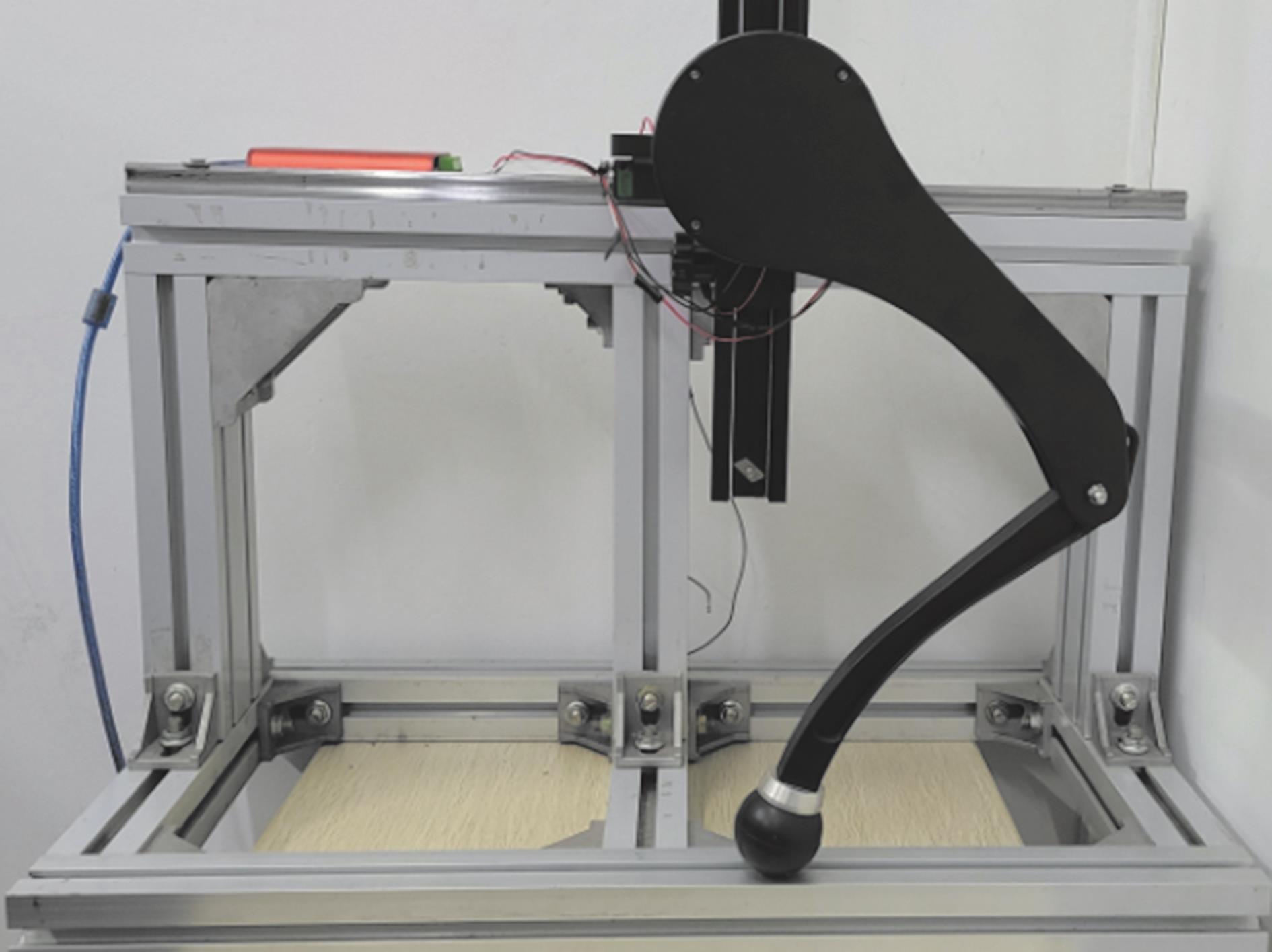
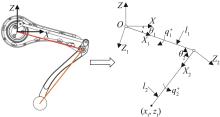
Fig. 2
Simplified model of four-legged robot with single leg
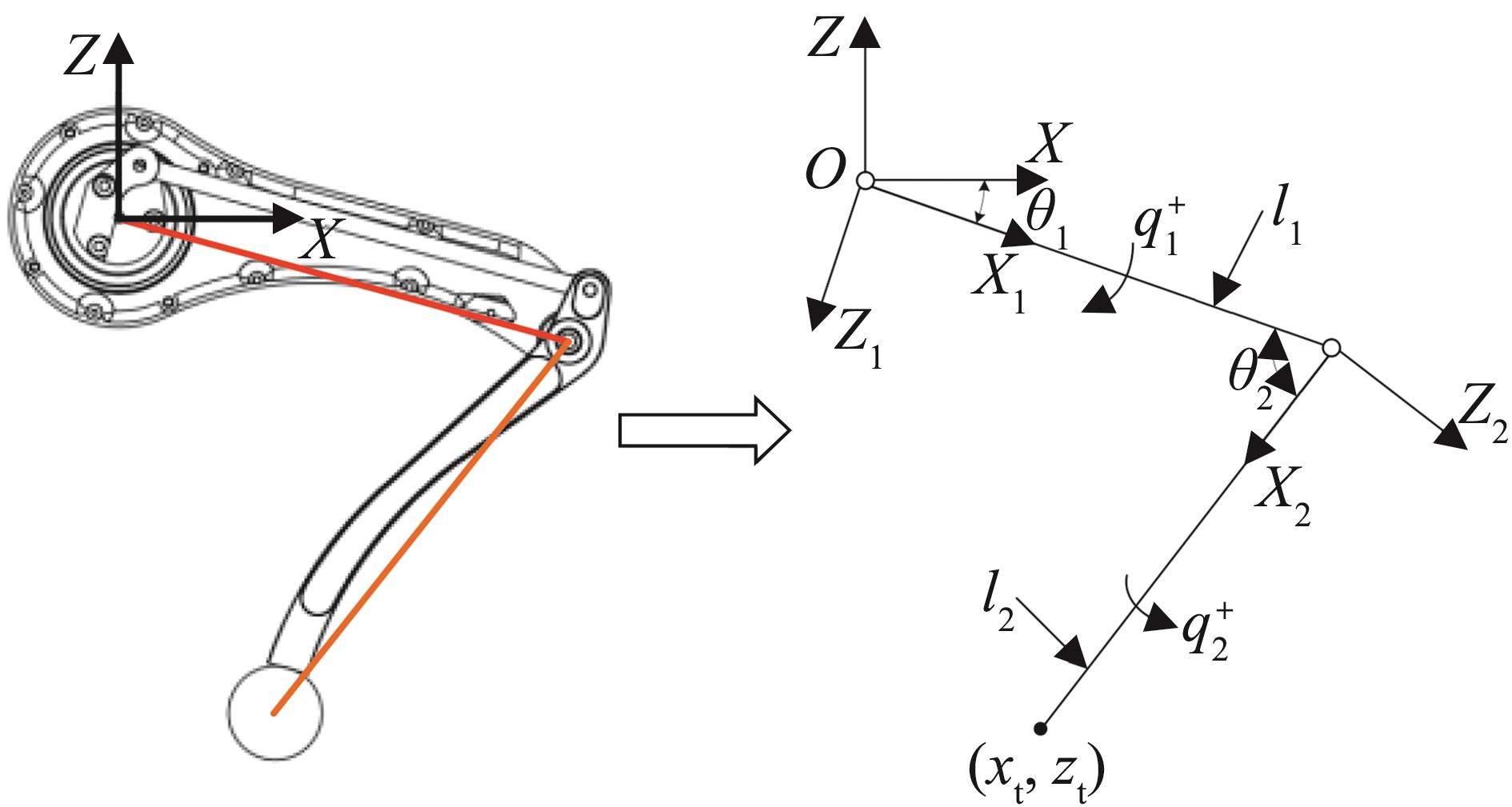
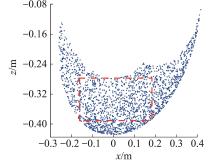
Fig. 3
Single leg foot movement space
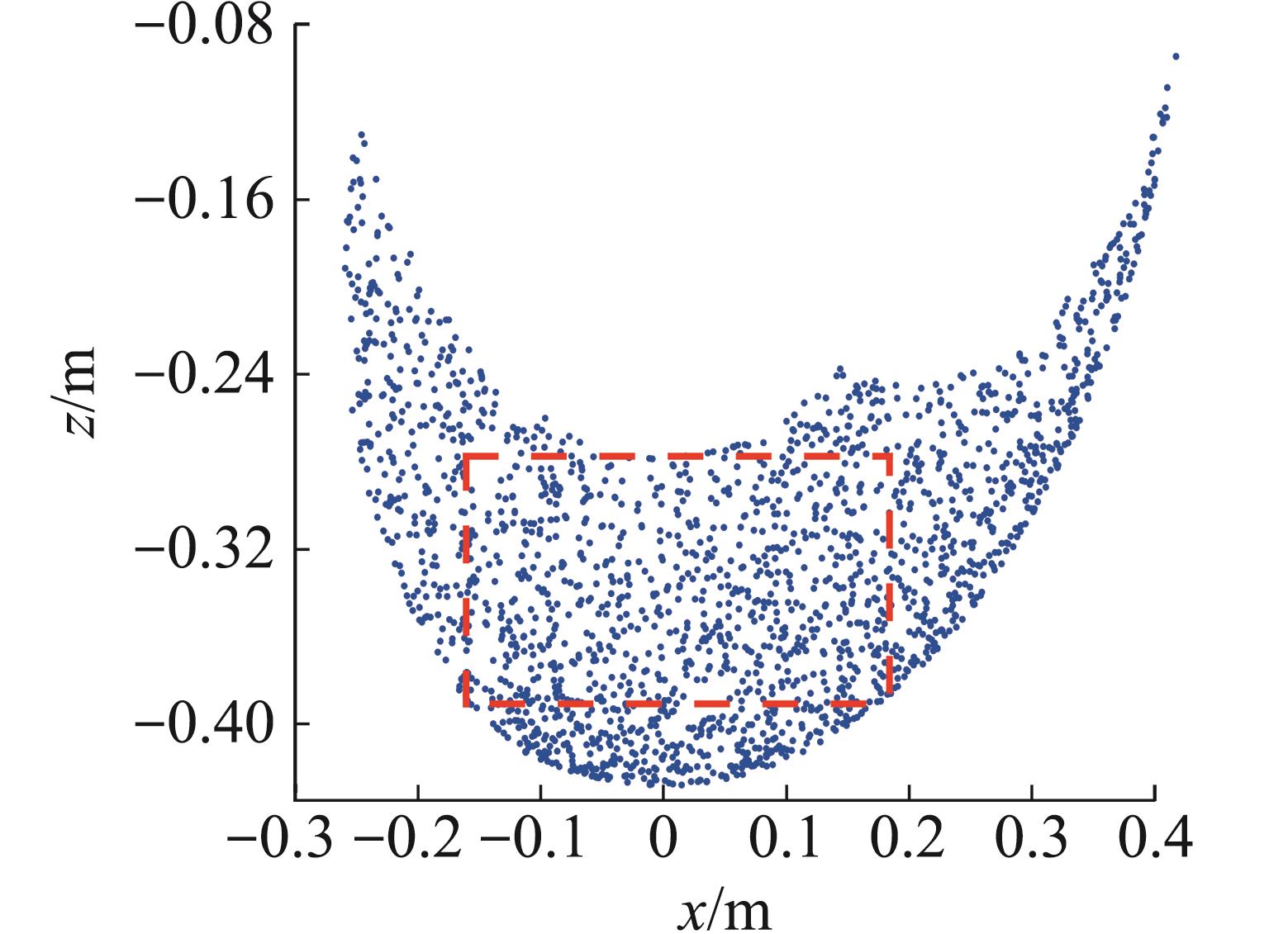
Fig. 4
Foot trajectory of quadruped robot

Fig. 5
Angular acceleration of single leg joint motion
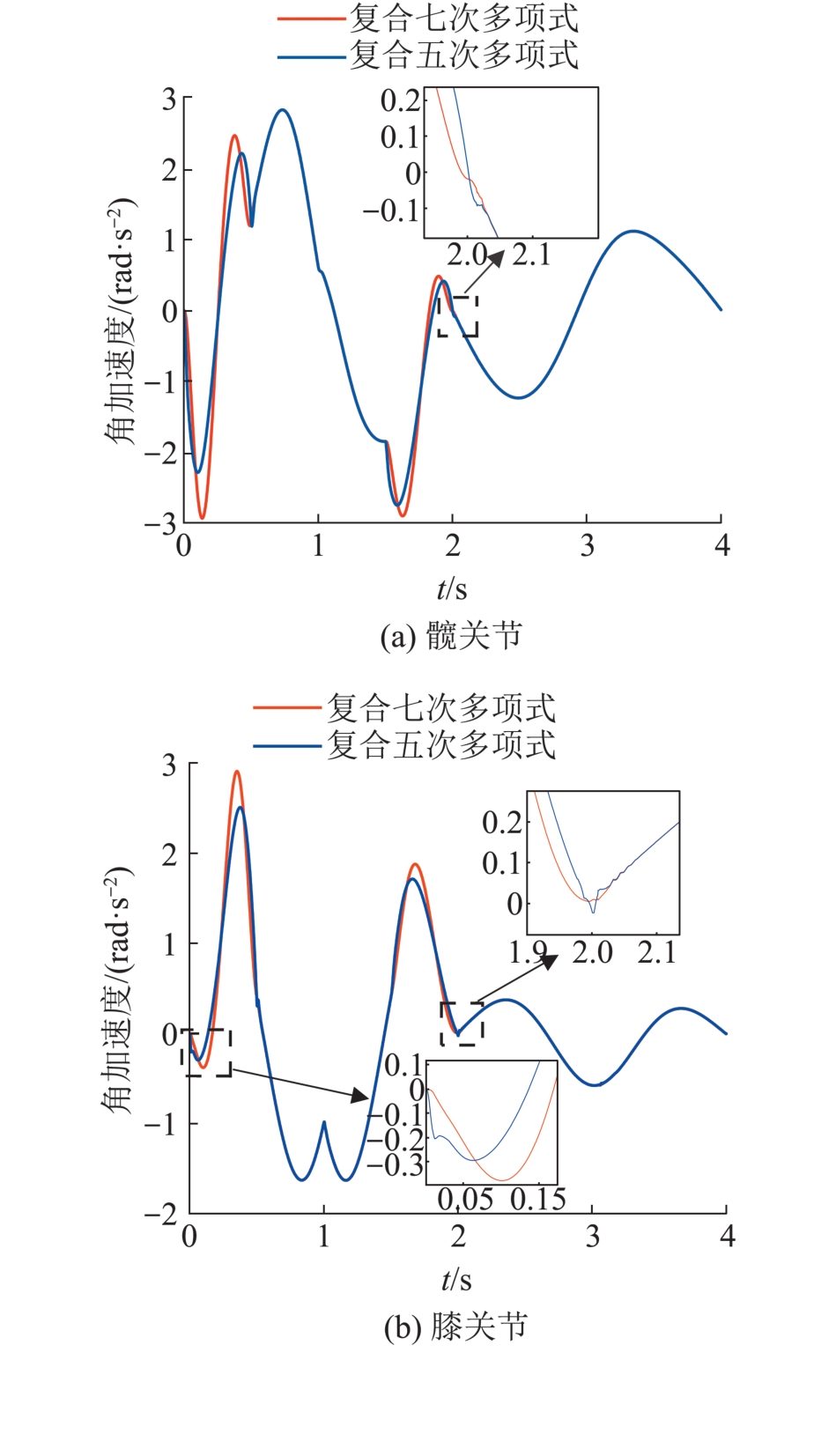

Fig. 6
Acceleration in x and z directions at foot of single leg
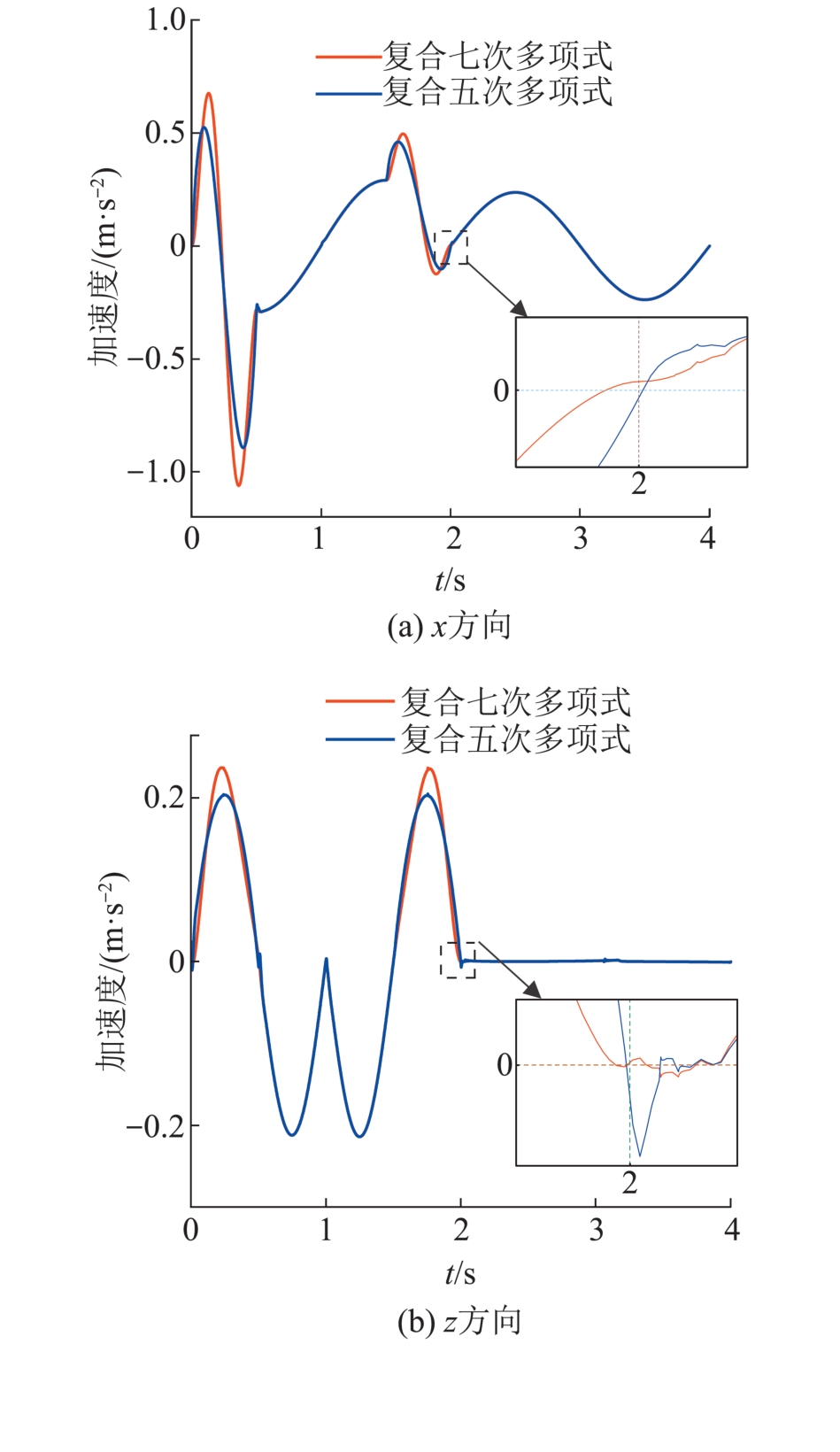
Table 1
Acceleration in x and z directionsat foot of single leg
| 规划方法 | x方向 | z方向 |
|---|---|---|
| 复合七次多项式 | 0 | |
| 复合五次多项式 |

Fig. 7
Single leg joint angle jerk
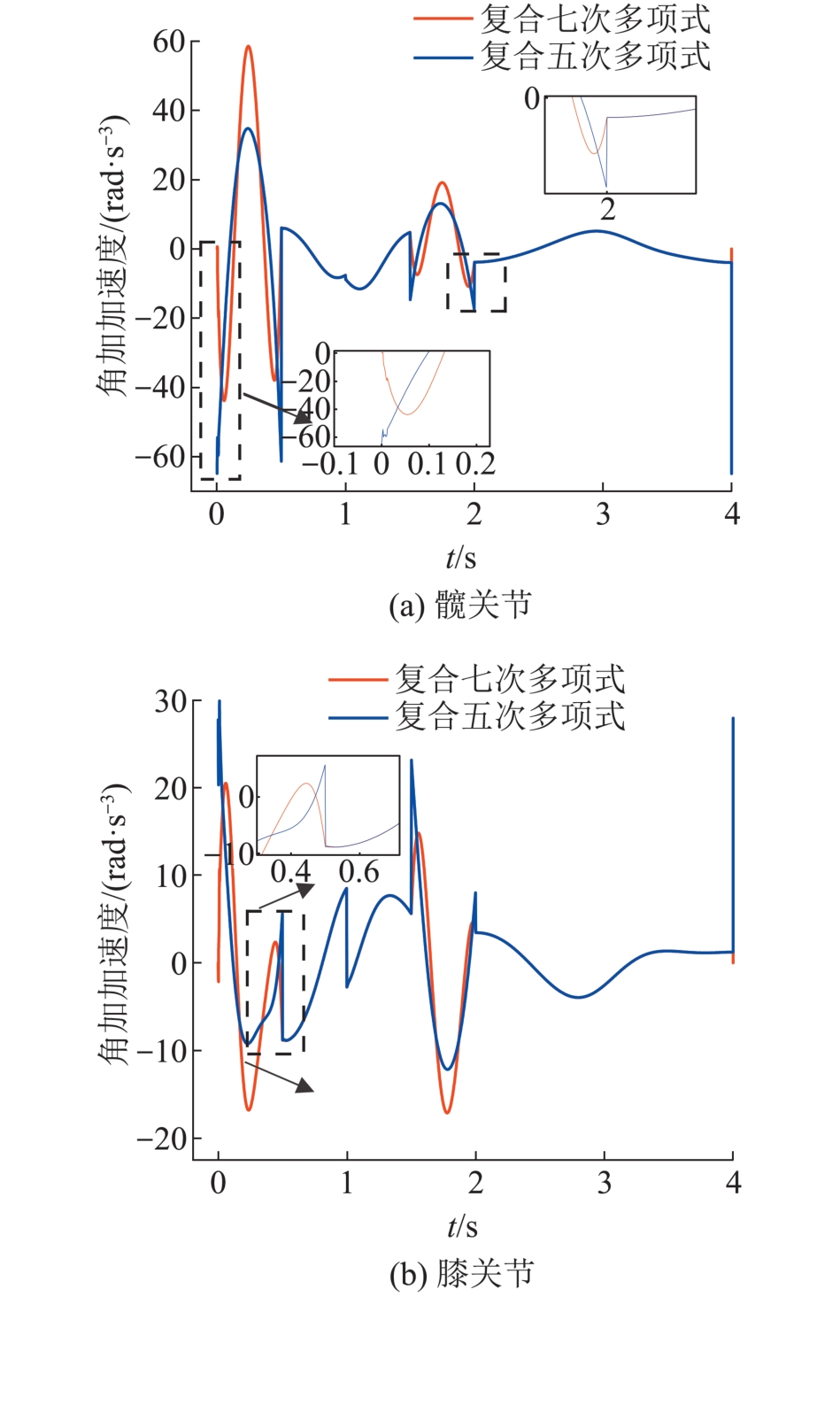
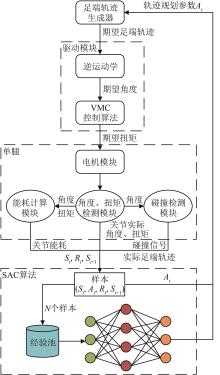
Fig. 8
Flow of single-leg obstacle crossing for robot based on SAC algorithm
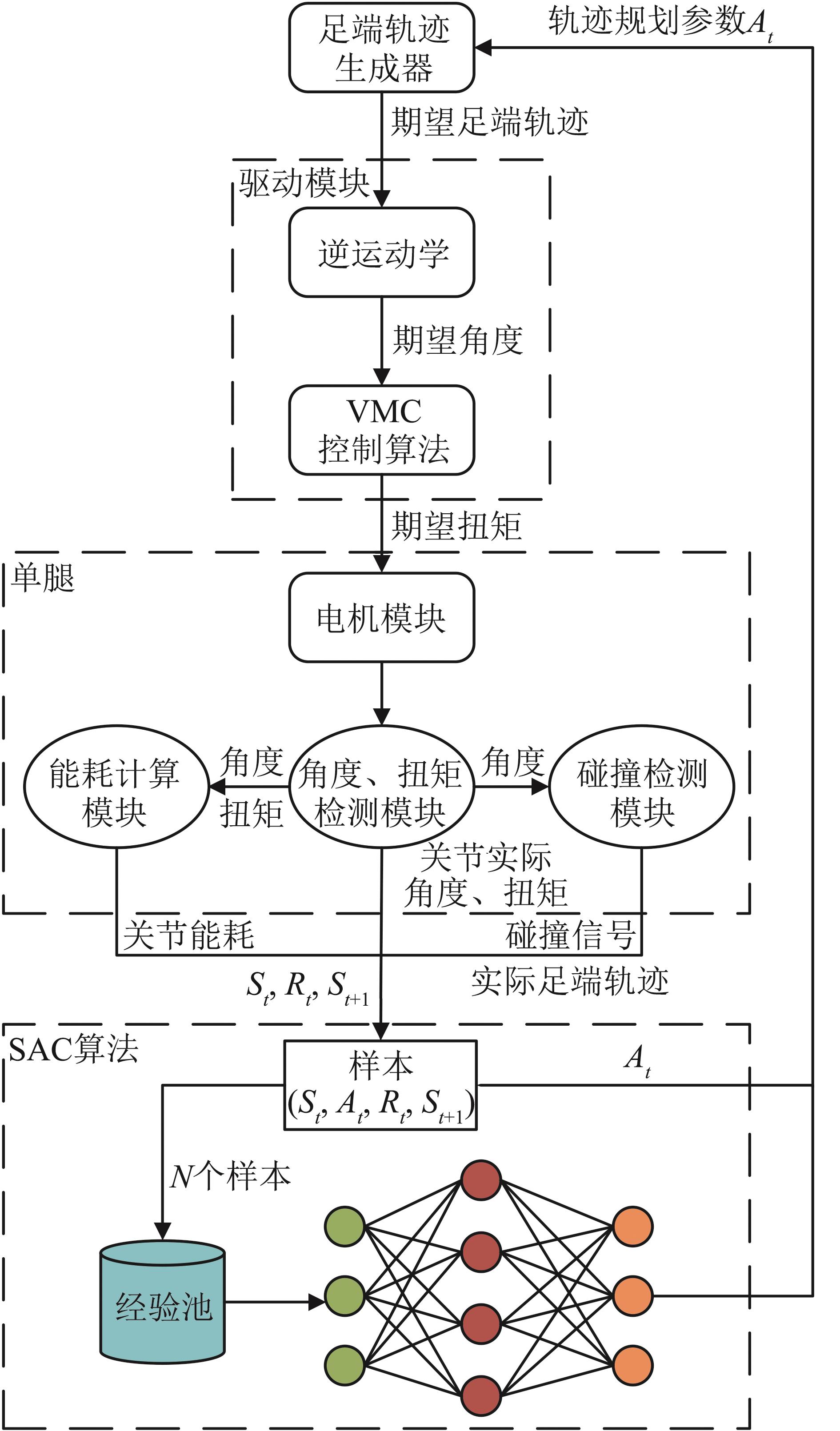
Table 2
SAC algorithm hyperparameters
| 参数名称 | 参数值 |
|---|---|
| Q网络学习率 | 0.001 |
| 策略网络学习率 | 0.001 |
| 温度熵系数 | 3 |
| 折扣因子 | 0.99 |
| 每回合采样数量 | 256 |
| 神经元个数 | 256, 128 |
| 训练最大回合数 | |
| 经验池容量 |
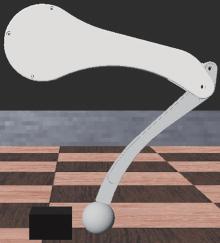
Fig. 9
Environment I
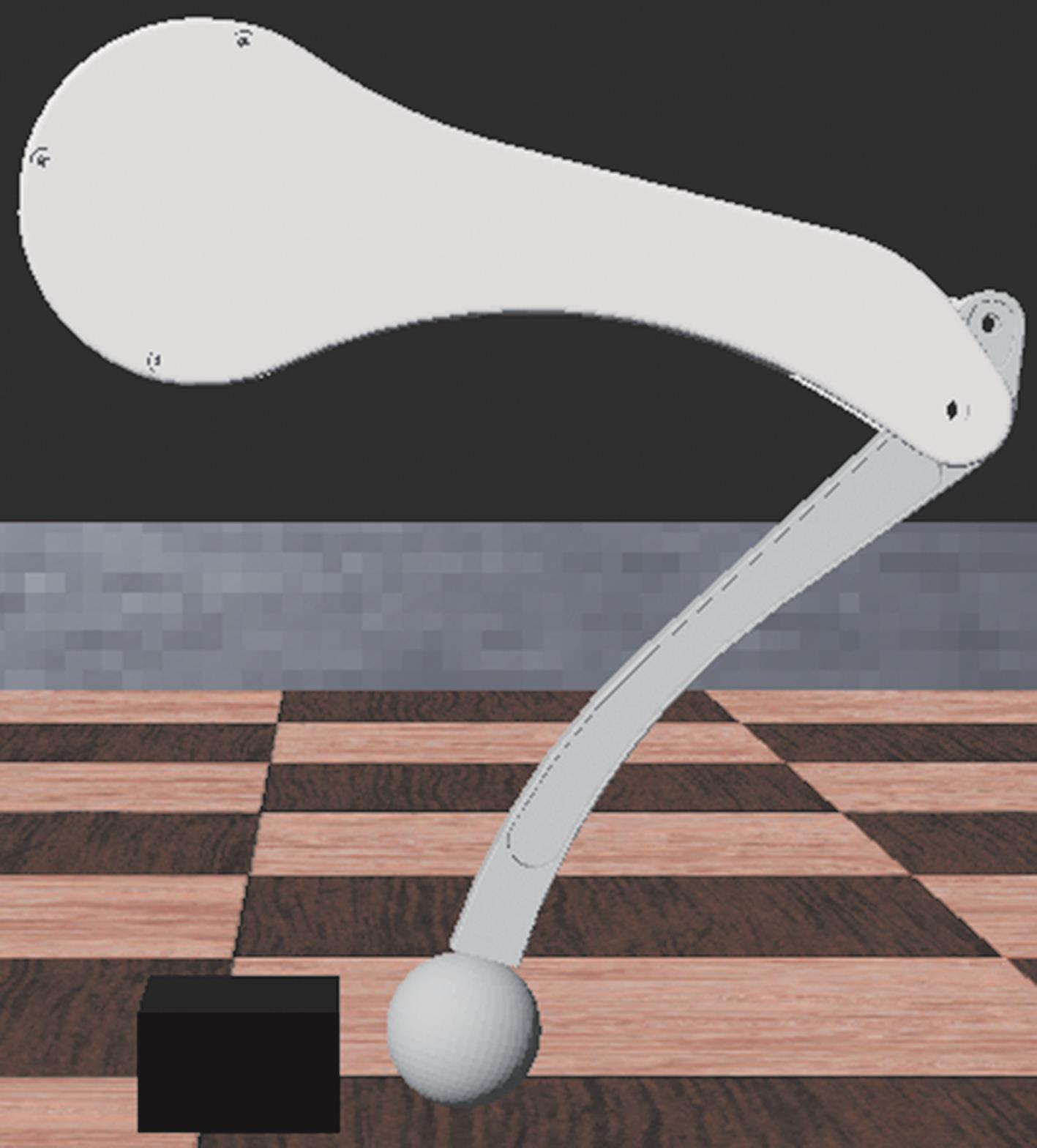

Fig. 10
Environment II
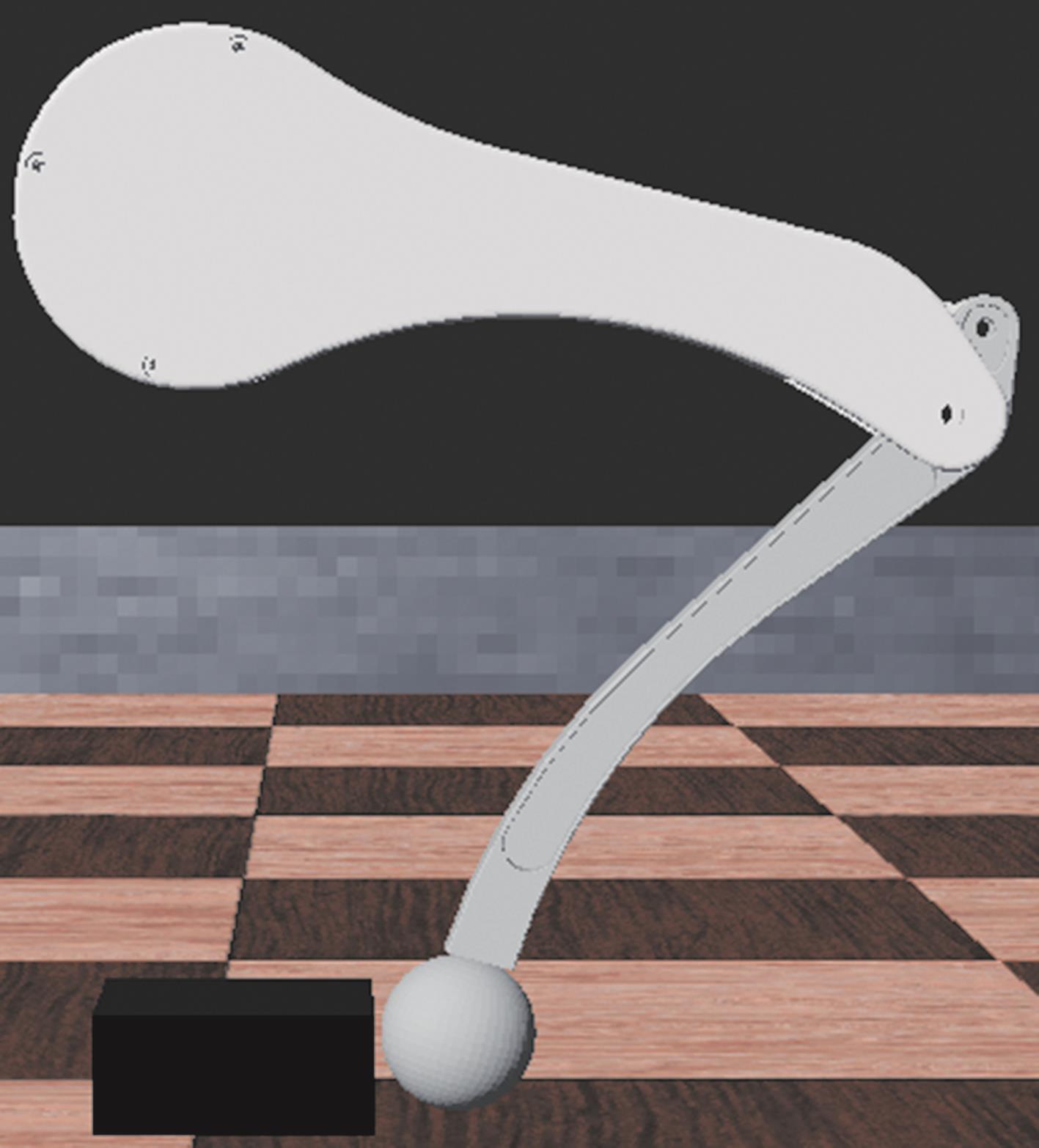
Table 3
Environmental parameters
| 环境 | 障碍物长度 | 障碍物宽度 | 障碍物高度 |
|---|---|---|---|
| 环境Ⅰ | 0.05 | 0.07 | 0.03 |
| 环境Ⅱ | 0.07 | 0.07 | 0.03 |
Table 4
Training time and average energy consumption results
| 环境 | 训练 时间 | 平均奖励 | 最高奖励 | 训练前期 平均能耗 | 训练后期 平均能耗 | 训练前期平均 后撤距离 | 训练后期平均 后撤距离 | 训练前期平均抬腿高度 | 训练后期平均抬腿高度 |
|---|---|---|---|---|---|---|---|---|---|
| 环境Ⅰ | 1.5 | 39 | 43 | 0.073 | 0.035 | 0.030 | 0.005 7 | 0.041 | 0.034 |
| 环境Ⅱ | 1.9 | 38 | 44 | 0.084 | 0.033 | 0.033 | 0.004 2 | 0.037 | 0.034 |
Fig. 11
Environment I single leg training set round reward
Fig. 12
Environment II single Leg training set round reward
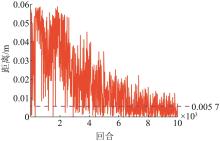
Fig. 13
Environment I single leg training retreat distance
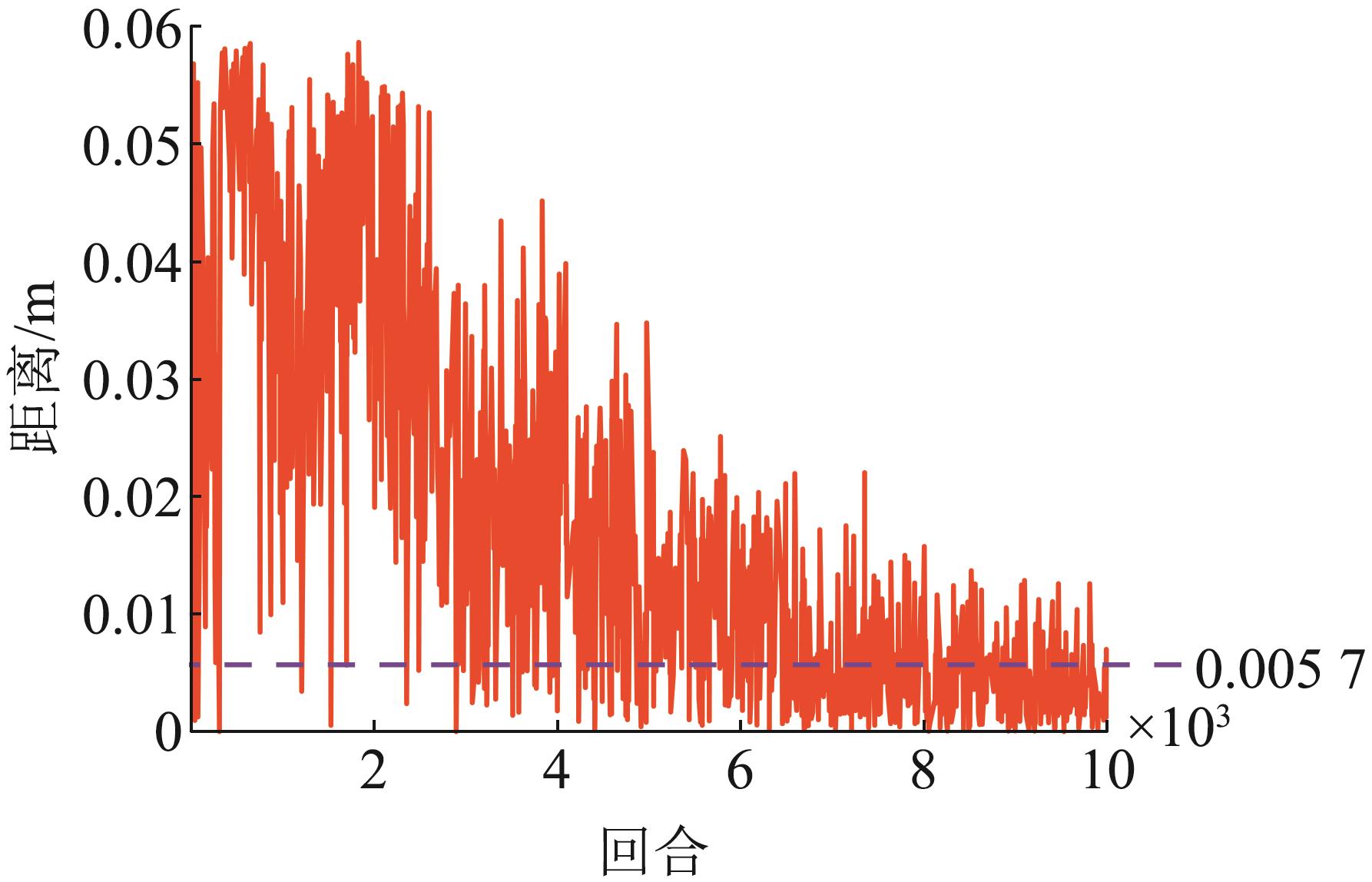
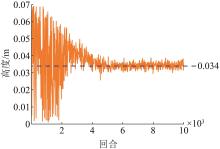
Fig. 14
Environment I single leg training step high
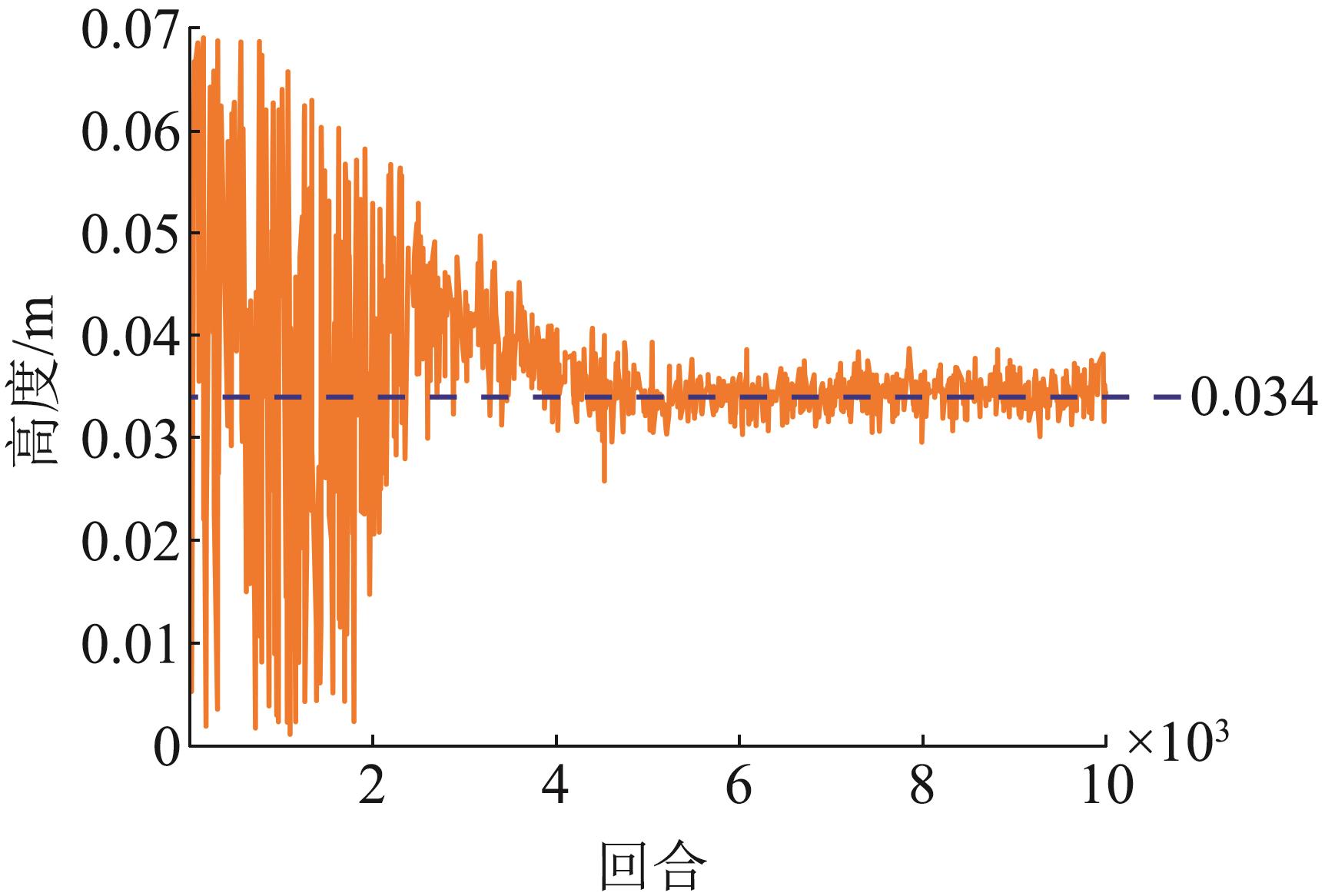
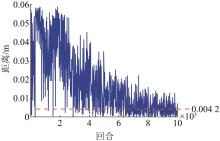
Fig. 15
Environment II single leg training retreat distance
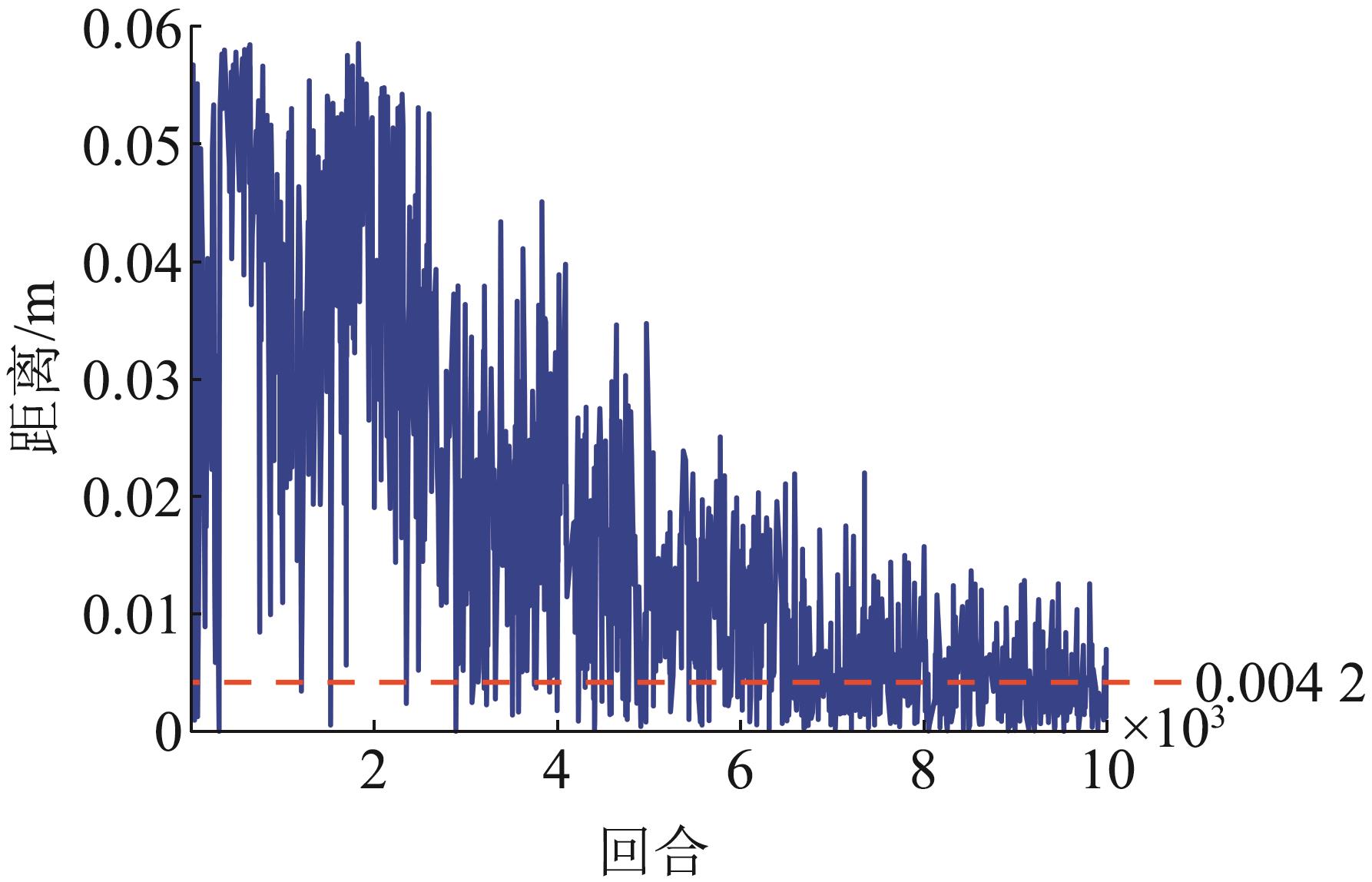
Fig. 16
Environment II single leg training step high
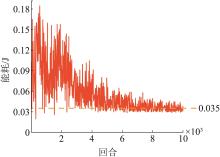
Fig. 17
Environment I single leg total energy consumption of training session
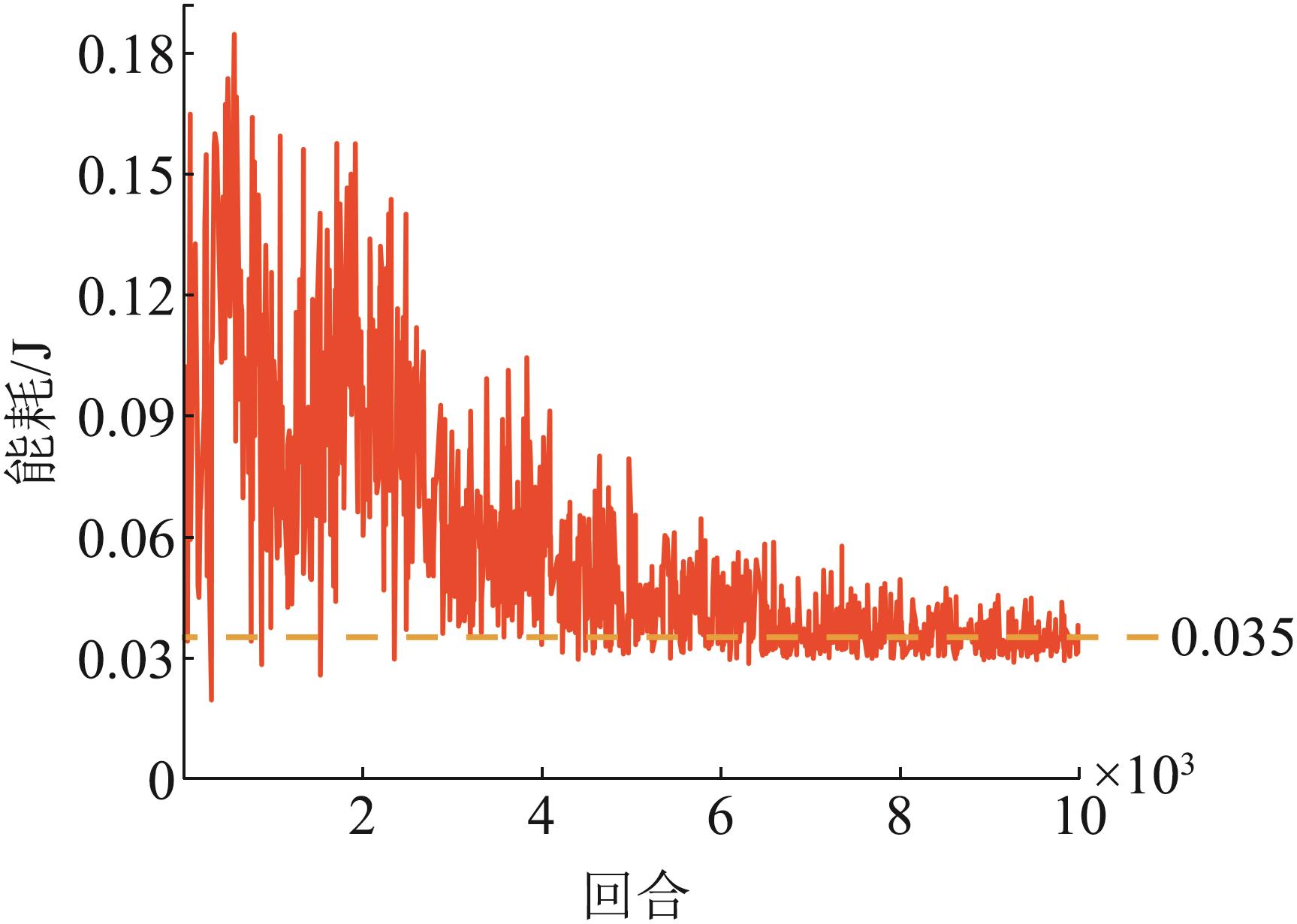
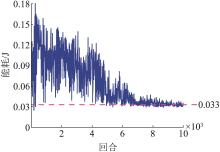
Fig. 18
Environment II single leg total energy consumption of training session
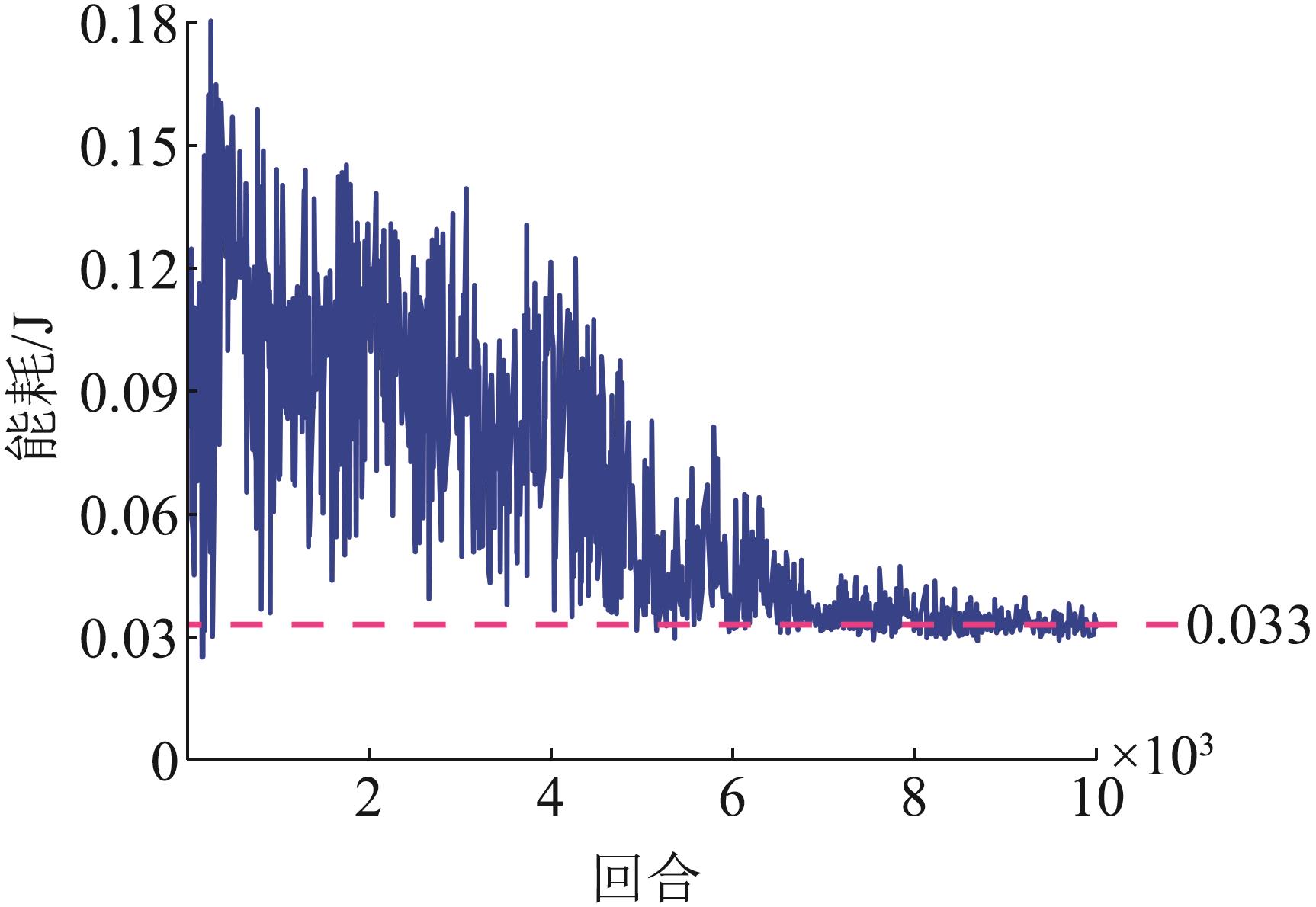
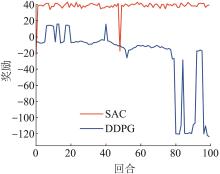
Fig. 19
Environment I test set round reward
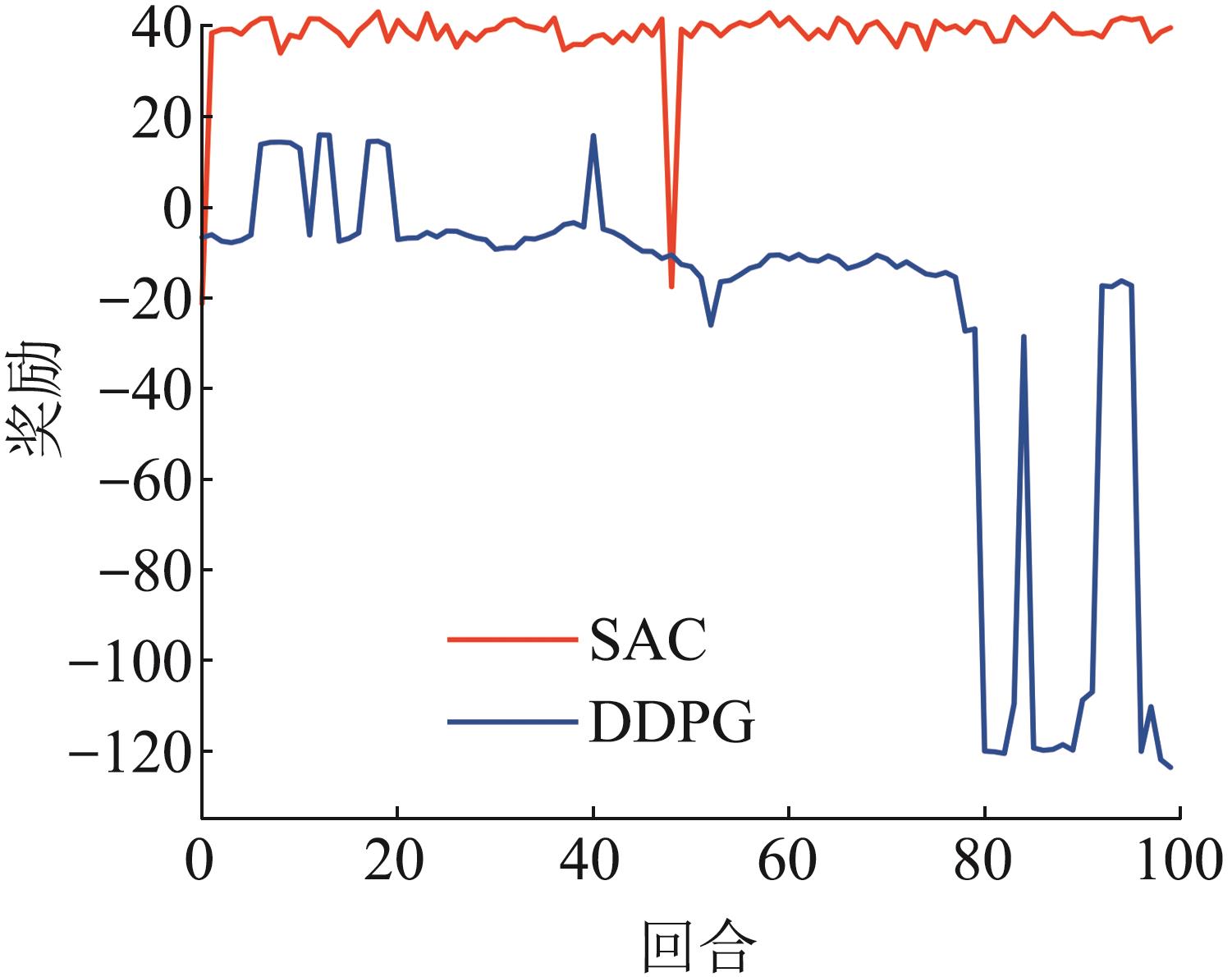
Fig. 20
Environment I test set single leg energy consunption
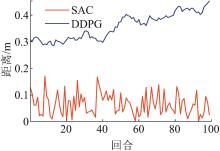
Fig. 21
Environment I test set single leg retreat distance of round
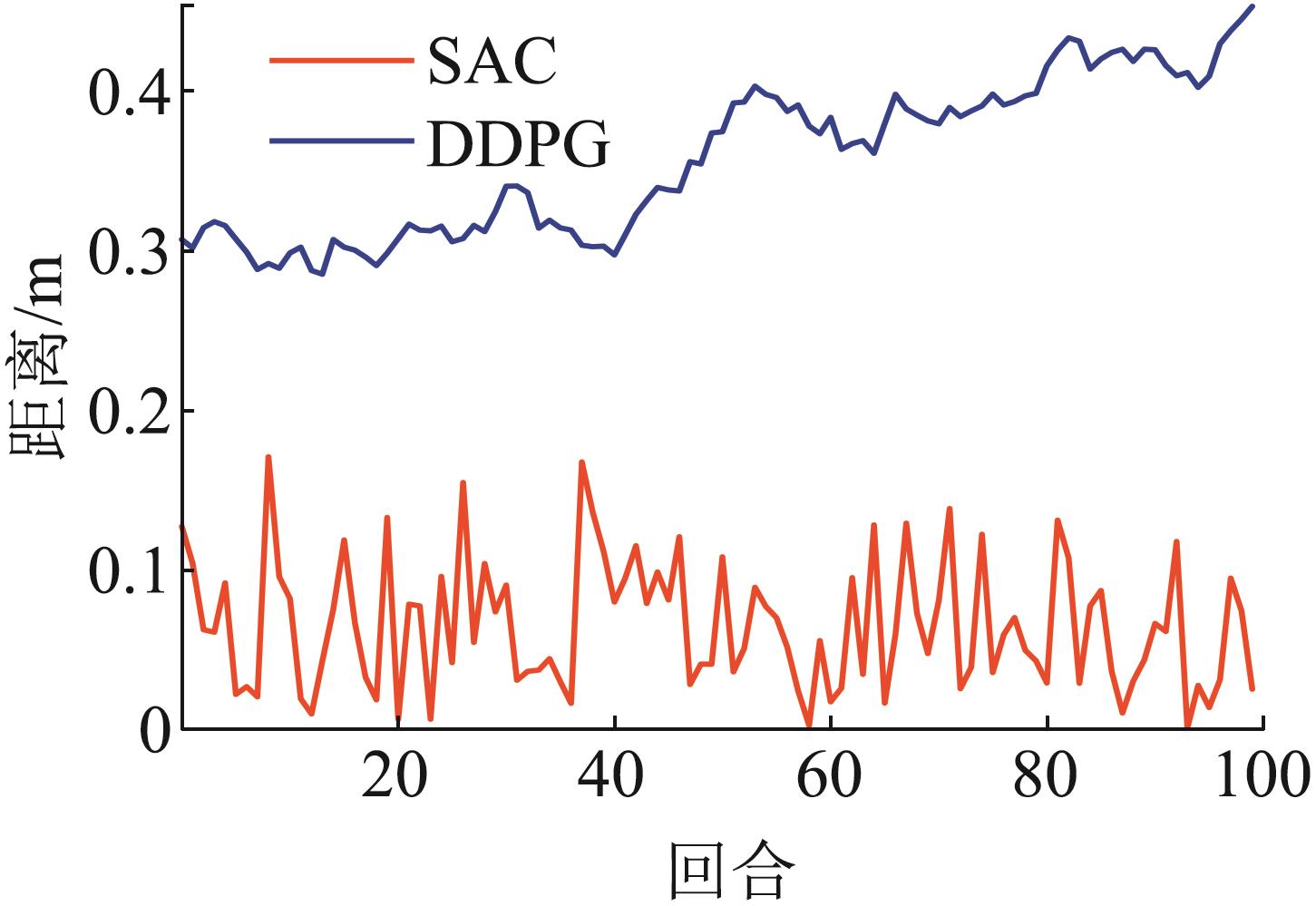
Fig. 22
Environment I test set single leg step high of round
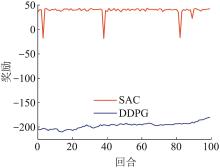
Fig. 23
Environment II test set round reward
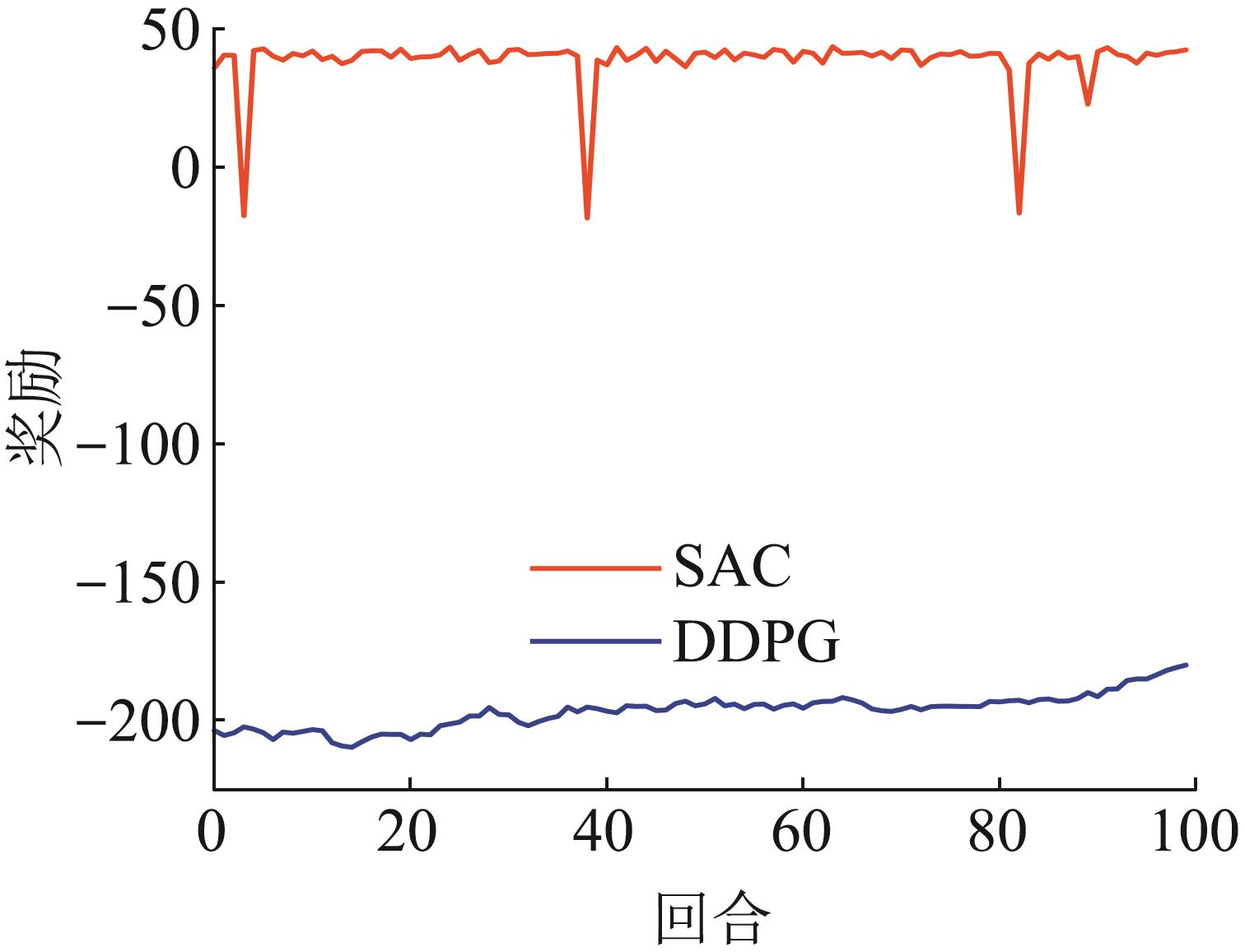
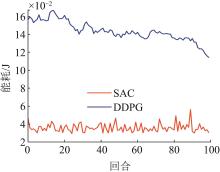
Fig. 24
Environment II test set single leg energy consumption
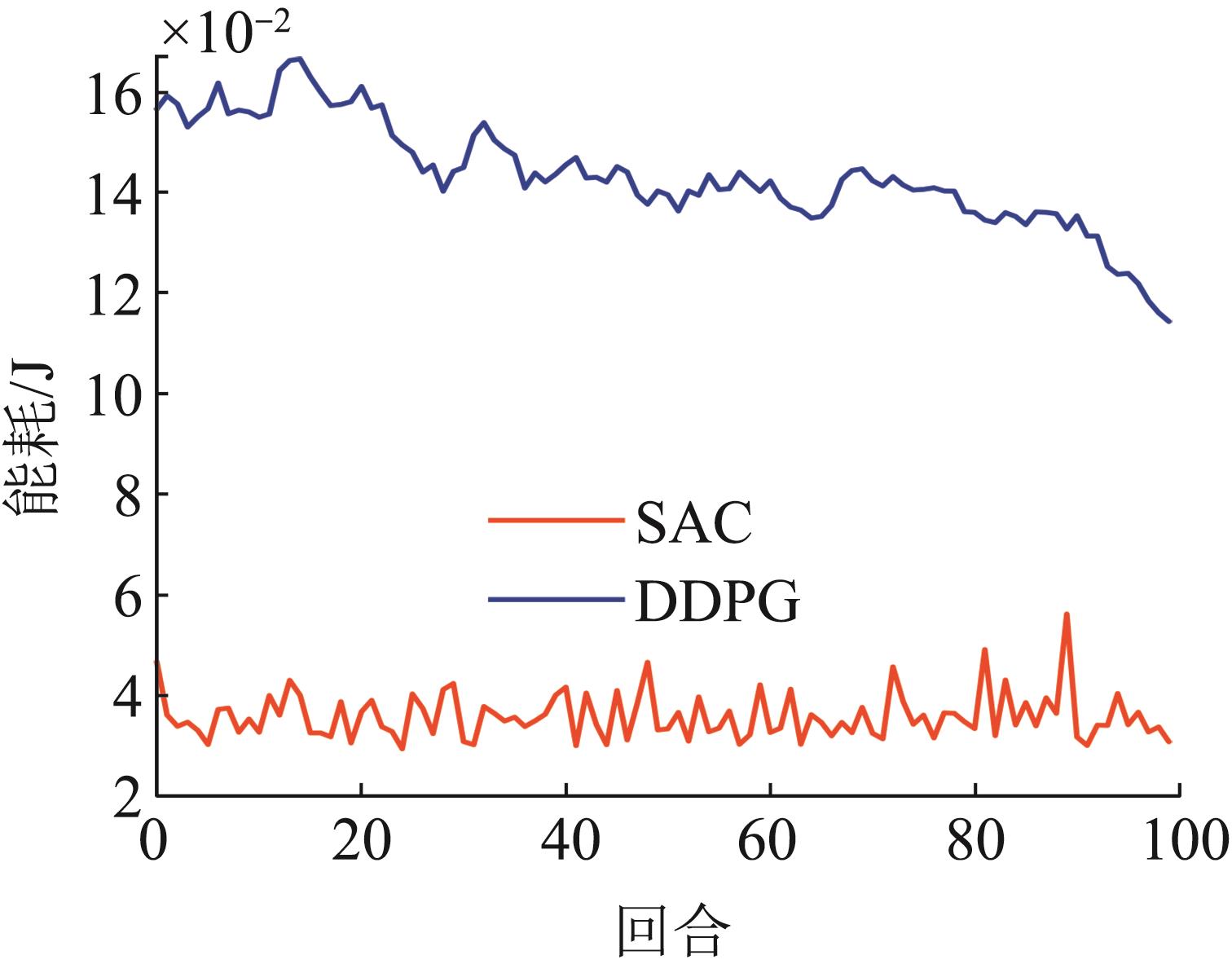
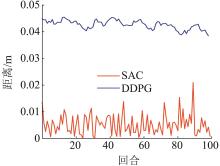
Fig. 25
Environment II test set single leg retreat distance of round
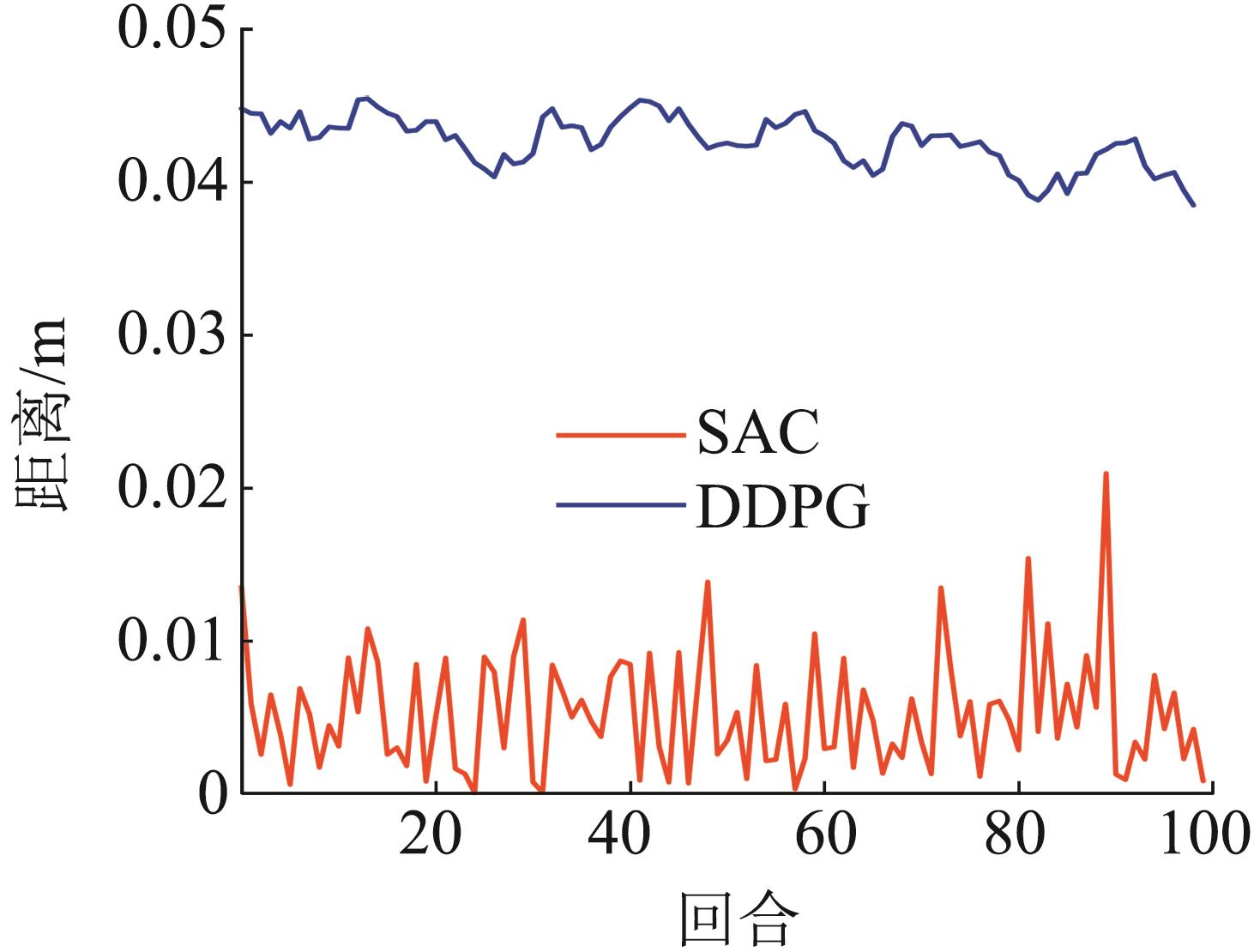
Fig. 26
Environment II test set single leg step high of round
Table 5
Algorithm comparison test set results
| 深度强化学习算法 | 环境 | 越障成功率/% | 低能耗越障 成功率/% | 平均能耗 | 测试集平均 后撤距离 | 测试集平均 抬腿高度 |
|---|---|---|---|---|---|---|
| SAC | 环境Ⅰ | 98 | 98 | 0.038 | 0.006 5 | 0.035 |
| 环境Ⅱ | 97 | 97 | 0.036 | 0.005 2 | 0.034 | |
| DDPG | 环境Ⅰ | 100 | 0 | 0.085 | 0.036 0 | 0.037 |
| 环境Ⅱ | 70 | 0 | 0.140 | 0.043 0 | 0.068 |
| 1 | Li Xiangfei, Zhao Huan, He Xianming, et al. A Novel Cartesian Trajectory Planning Method by Using Triple NURBS Curves for Industrial Robots[J]. Robotics and Computer-Integrated Manufacturing, 2023, 83: 102576. |
| 2 | Huang Zhenzhen, Wu Hong. Overview of Trajectory Planning Methods for Robot Systems[C]//2021 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS). Piscataway: IEEE, 2021: 375-381. |
| 3 | Taheri Hamid, Mozayani Nasser. A Study on Quadruped Mobile Robots[J]. Mechanism and Machine Theory, 2023, 190: 105448. |
| 4 | 董理, 杨东, 鹿建森. 工业机器人轨迹规划方法综述[J]. 控制工程, 2022, 29(12): 2365-2374. |
| Dong Li, Yang Dong, Lu Jiansen. Trajectory Planning Methods for Industrial Robots: A Review[J]. Control Engineering of China, 2022, 29(12): 2365-2374. | |
| 5 | 董豪, 杨静, 李少波, 等. 基于深度强化学习的机器人运动控制研究进展[J]. 控制与决策, 2022, 37(2): 278-292. |
| Dong Hao, Yang Jing, Li Shaobo, et al. Research Progress of Robot Motion Control Based on Deep Reinforcement Learning[J]. Control and Decision, 2022, 37(2): 278-292. | |
| 6 | Zhong Jun, Luo Minzhou, Fan Jizhuang, et al. Trajectory Planning of an Intermittent Jumping Quadruped Robot with Variable Redundant and Underactuated Joints[J]. Complexity, 2018, 2018(1): 5369427. |
| 7 | Zeng Xuanqi, Zhang Songyuan, Zhang Hongji, et al. Leg Trajectory Planning for Quadruped Robots with High-speed Trot Gait[J]. Applied Sciences, 2019, 9(7): 1508. |
| 8 | Chen Mingfang, Zhang Kaixiang, Wang Sen, et al. Analysis and Optimization of Interpolation Points for Quadruped Robots Joint Trajectory[J]. Complexity, 2020, 2020(1): 3507679. |
| 9 | Wang Kang, Zhao Haoyu, Meng Fei, et al. Research on the Jumping Control Methods of a Quadruped Robot That Imitates Animals[J]. Biomimetics, 2023, 8(1): 36. |
| 10 | Tao Bo, Yang Dongchao, Huang Geng, et al. Omnidirectional Motion Control Method of Quadruped Robot Based on 3D-CPG Oscillator Group[C]//Robotics in Natural Settings. Cham: Springer International Publishing, 2023: 301-312. |
| 11 | Liu Qingyu, Xu Duo, Yuan Bing, et al. Distance-controllable Long Jump of Quadruped Robot Based on Parameter Optimization Using Deep Reinforcement Learning[J]. IEEE Access, 2023, 11: 98566-98577. |
| 12 | Sharma Bibhu, Pillai Branesh M, Suthakorn Jackrit. Biomechanical Trajectory Optimization of Human Sit-to-stand Motion with Stochastic Motion Planning Framework[J]. IEEE Transactions on Medical Robotics and Bionics, 2022, 4(4): 1022-1033. |
| 13 | Tan Wenhao, Fang Xing, Zhang Wei, et al. A Hierarchical Framework for Quadruped Omnidirectional Locomotion Based on Reinforcement Learning[J]. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 5367-5378. |
| 14 | Wu Jiaxi, Wang Chen'an, Zhang Dianmin, et al. Learning Smooth and Omnidirectional Locomotion for Quadruped Robots[C]//2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM). Piscataway: IEEE, 2021: 633-638. |
| 15 | Bogdanovic Miroslav, Khadiv Majid, Righetti L. Model-free Reinforcement Learning for Robust Locomotion Using Demonstrations from Trajectory Optimization[J]. Frontiers in Robotics and AI, 2022, 9: 854212. |
| 16 | Zhu Wangshu, Rosendo A. PSTO: Learning Energy-efficient Locomotion for Quadruped Robots[J]. Machines, 2022, 10(3): 185. |
| 17 | Yang Laiyi, Bi Jing, Yuan Haitao. Dynamic Path Planning for Mobile Robots with Deep Reinforcement Learning[J]. IFAC-PapersOnLine, 2022, 55(11): 19-24. |
| 18 | Nippun Kumaar A A, Kochuvila Sreeja. Mobile Service Robot Path Planning Using Deep Reinforcement Learning[J]. IEEE Access, 2023, 11: 100083-100096. |
| 19 | Dong Lu, He Zichen, Song Chunwei, et al. A Review of Mobile Robot Motion Planning Methods: From Classical Motion Planning Workflows to Reinforcement Learning-based Architectures[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 439-459. |
| 20 | Tian Hao, Xu Xiaolong, Qi Lianyong, et al. CoPace: Edge Computation Offloading and Caching for Self-driving with Deep Reinforcement Learning[J]. IEEE Transactions on Vehicular Technology, 2021, 70(12): 13281-13293. |
| 21 | Chihara Takanori, Sakamoto Jiro. Generating Deceleration Behavior of Automatic Driving by Reinforcement Learning That Reflects Passenger Discomfort[J]. International Journal of Industrial Ergonomics, 2022, 91: 103343. |
| 22 | 陈善言, 关永, 施智平, 等. 机器人碰撞检测方法形式化[J]. 软件学报, 2022, 33(6): 2246-2263. |
| Chen Shanyan, Guan Yong, Shi Zhiping, et al. Formalization of Collision Detection Method for Robots[J]. Journal of Software, 2022, 33(6): 2246-2263. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Wang Xueqian, Men Jianbing, Zhou Xin, Wang Shuyou, Li Mei. A Precise Damage Assessment Method for Lethal Blast Warheads Against Quadruped Robots [J]. Journal of System Simulation, 2026, 38(3): 702-713. |
| [3] | Wu Shuxia, Zhang Junjie, Chen Delong, Chen Zheyi. Resource-efficient Continuous Learning Framework for Edge Real-time Video Analytics [J]. Journal of System Simulation, 2026, 38(2): 294-306. |
| [4] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [5] | Liu Quan, Wang Yu, Liu Linyue, Chen Hao, Huang Jian. Knowledge Closed-loop Driving-based Intelligent Game Confrontation Simulation [J]. Journal of System Simulation, 2026, 38(2): 416-432. |
| [6] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [7] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [8] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [9] | Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(3): 595-606. |
| [10] | Zhang Bin, Lei Yonglin, Li Qun, Gao Yuan, Chen Yong, Zhu Jiajun, Bao Chenlong. Reinforcement Learning Modeling of Missile Penetration Decision Based on Combat Simulation [J]. Journal of System Simulation, 2025, 37(3): 763-774. |
| [11] | Huang Sijin, Wen Jia, Chen Zheyi. Intelligent Service Migration towards MEC-based IoV Systems [J]. Journal of System Simulation, 2025, 37(2): 379-391. |
| [12] | Fei Shuaidi, Cai Changlong, Liu Fei, Chen Minghui, Liu Xiaoming. Research on the Target Allocation Method for Air Defense and Anti-missile Defense of Naval Ships [J]. Journal of System Simulation, 2025, 37(2): 508-516. |
| [13] | Zhang Daoxun, Chen Xieyuanli, Zhong Zhengyu, Xu Ming, Zheng Zhiqiang, Lu Huimin. Novel Multi-gait Strategy for Stable and Efficient Quadruped Robot Locomotion [J]. Journal of System Simulation, 2025, 37(1): 13-24. |
| [14] | Wang Zhu, Zhang Zhenpeng, Zhang Mengtong, Xu Guangtong. Sequential Convex Programming Using Safe Flight Corridor for Trajectory Planning of UAVs [J]. Journal of System Simulation, 2025, 37(1): 134-144. |
| [15] | Li Chao, Li Jiabao, Ding Caichang, Ye Zhiwei, Zuo Fangwei. Edge Surveillance Task Offloading and Resource Allocation Algorithm Based on DRL [J]. Journal of System Simulation, 2024, 36(9): 2113-2126. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
