

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (9): 1918-1930.doi: 10.16182/j.issn1004731x.joss.22-0538
• Papers • Previous Articles Next Articles
Wang Man1( ), Li Dapeng1(), Ding Lianghui2, Zhu Tianlin1
), Li Dapeng1(), Ding Lianghui2, Zhu Tianlin1
Received:2022-05-18
Revised:2022-06-17
Online:2023-09-25
Published:2023-09-19
Contact:
Li Dapeng
E-mail:wmm5296@163.com;dapengli@njupt.edu.cn
CLC Number:
Wang Man, Li Dapeng, Ding Lianghui, Zhu Tianlin. Formation Obstacle Avoidance Algorithm Based on Joint Virtual Sub-target and Boundary Force[J]. Journal of System Simulation, 2023, 35(9): 1918-1930.
Table 1
Main parameters
| 符号 | 描述 |
|---|---|
| RL | 领航无人机 |
| RF | 跟随无人机 |
| Ri | 第i架无人机 |
| Ri′ | Ri 对应的虚拟子目标 |
| qi (t) | Ri 在t时刻的位置向量 |
| pi (t) | Ri 在t时刻的速度向量 |
| ui (t) | Ri 在t时刻的输入控制 |
| Dr1 | Ri 与障碍物之间的边界距离 |
| Dr2 | Ri 与目标点之间的边界距离 |
| Dbn | Ri 与第n个障碍物之间的距离 |
| Dt | Ri 与目标点之间的距离 |
| Do | 障碍物的斥力作用范围大小 |
| 大于0的修正系数 | |
| 大于1的常系数 | |
| Fc | 修正力 |
| Fd | 边界力 |
| Fat | Ri 受到的引力 |
| Fre | Ri 受到的斥力 |
| Fsum | Ri 受到的合力 |

Fig. 1
Communication topology

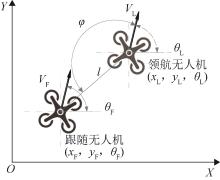
Fig. 2
l-φformation mode
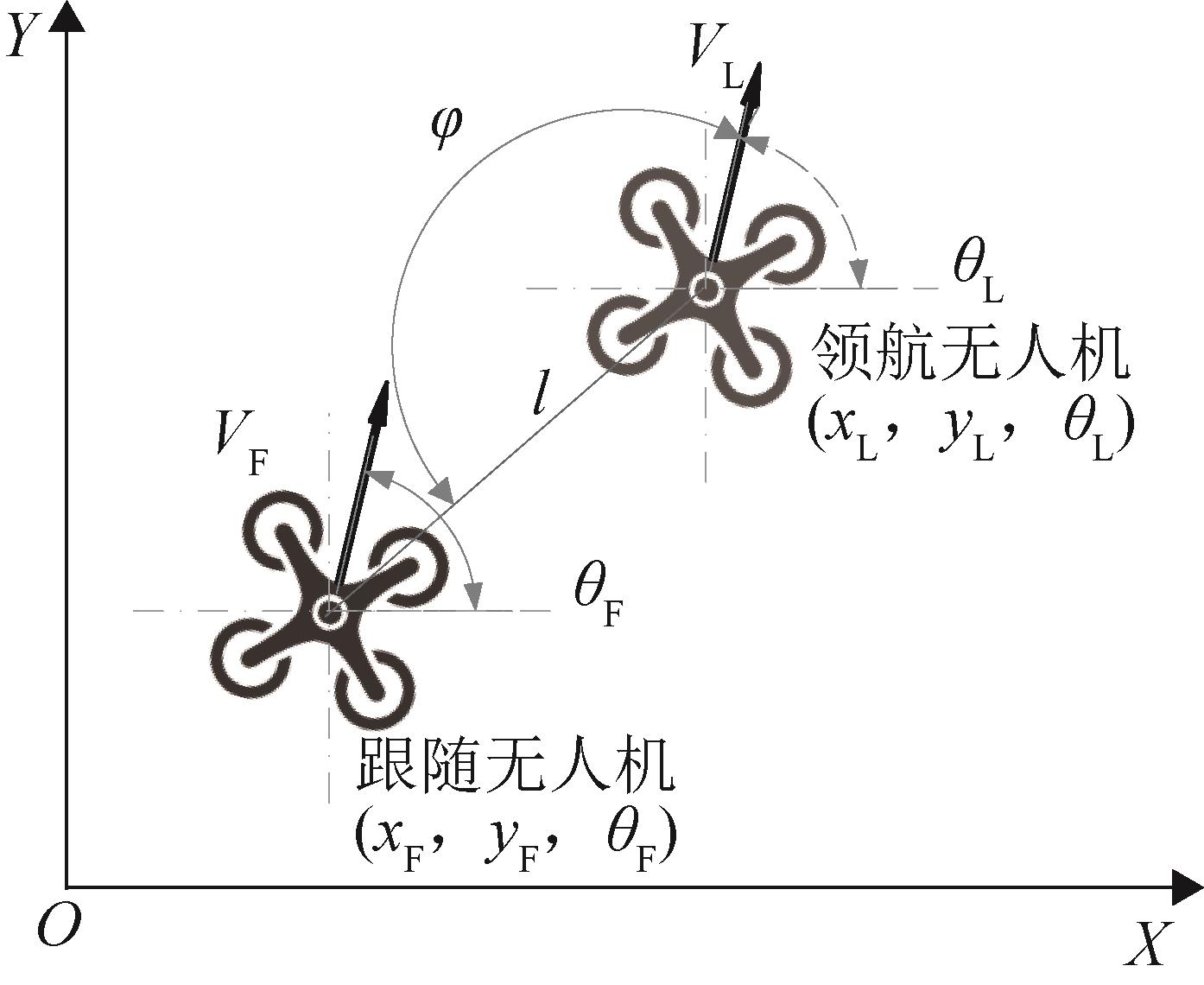
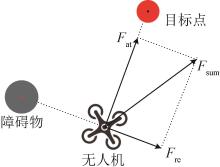
Fig. 3
Stress analysis of artificial potential field
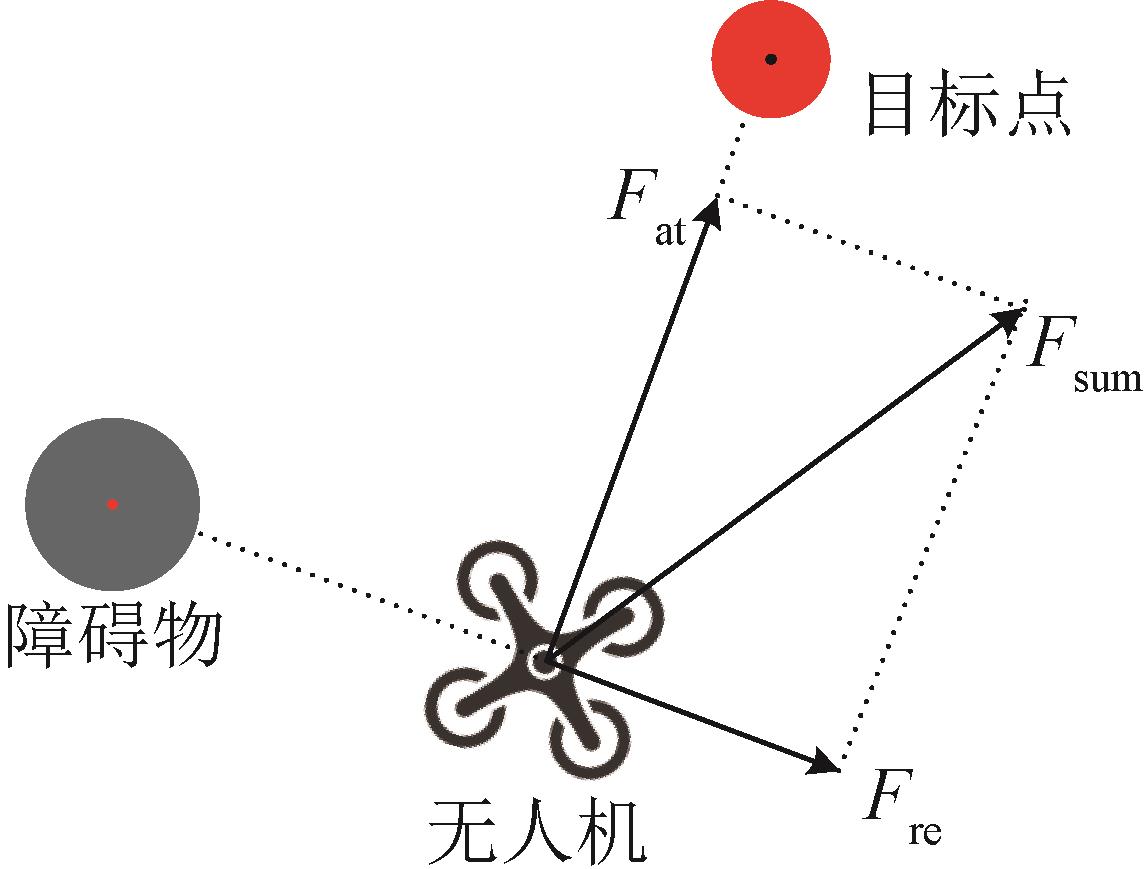
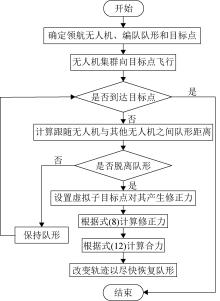
Fig. 4
Sub algorithm flow of UAV swarm formation correction based on virtual sub-target
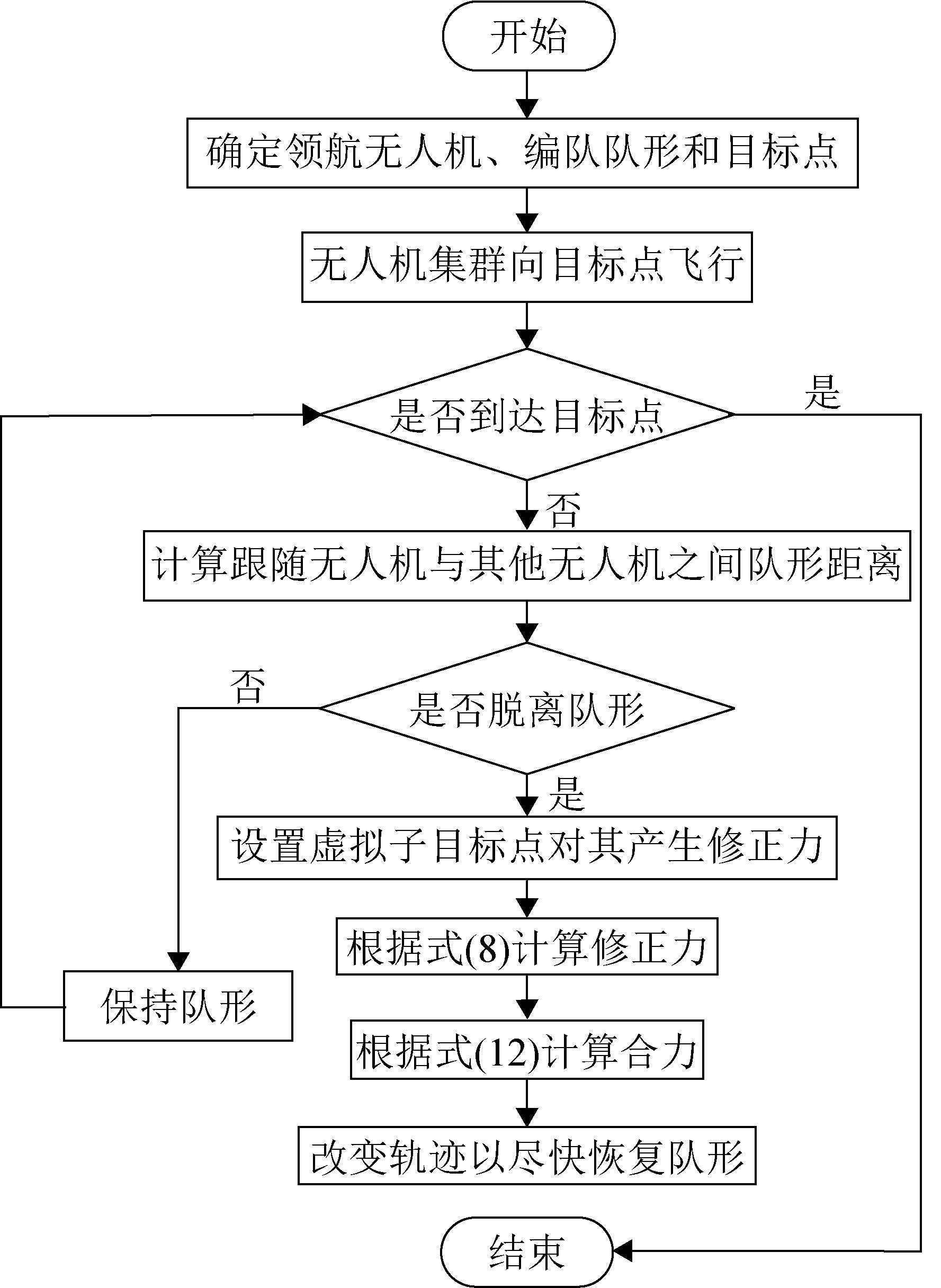
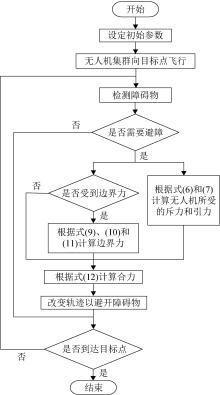
Fig. 5
Sub algorithm flow of UAV swarm obstacle avoidance based on boundary force
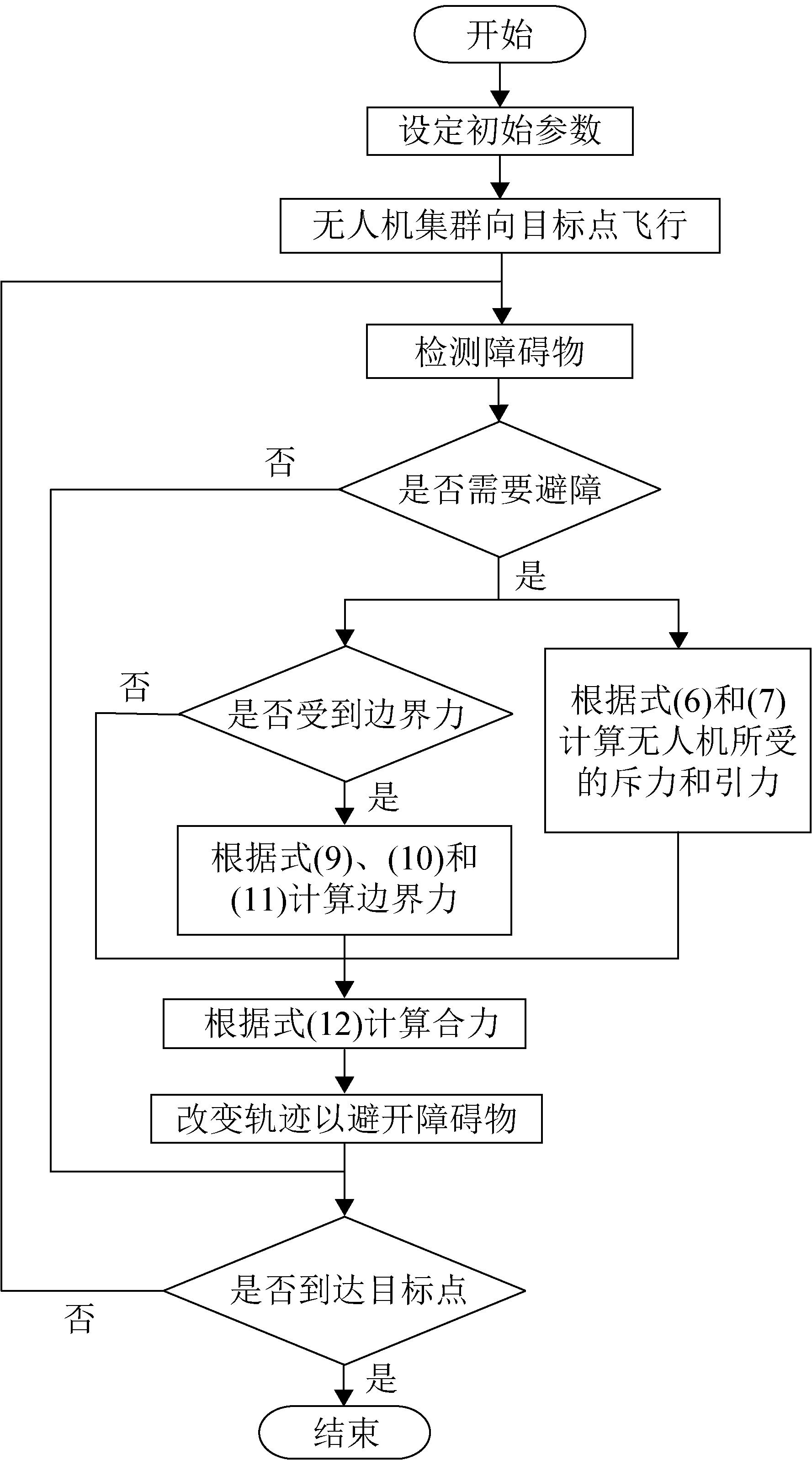
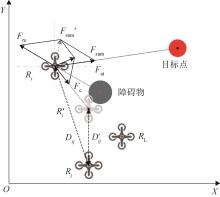
Fig. 6
Swarm formation correction by virtual sub-target
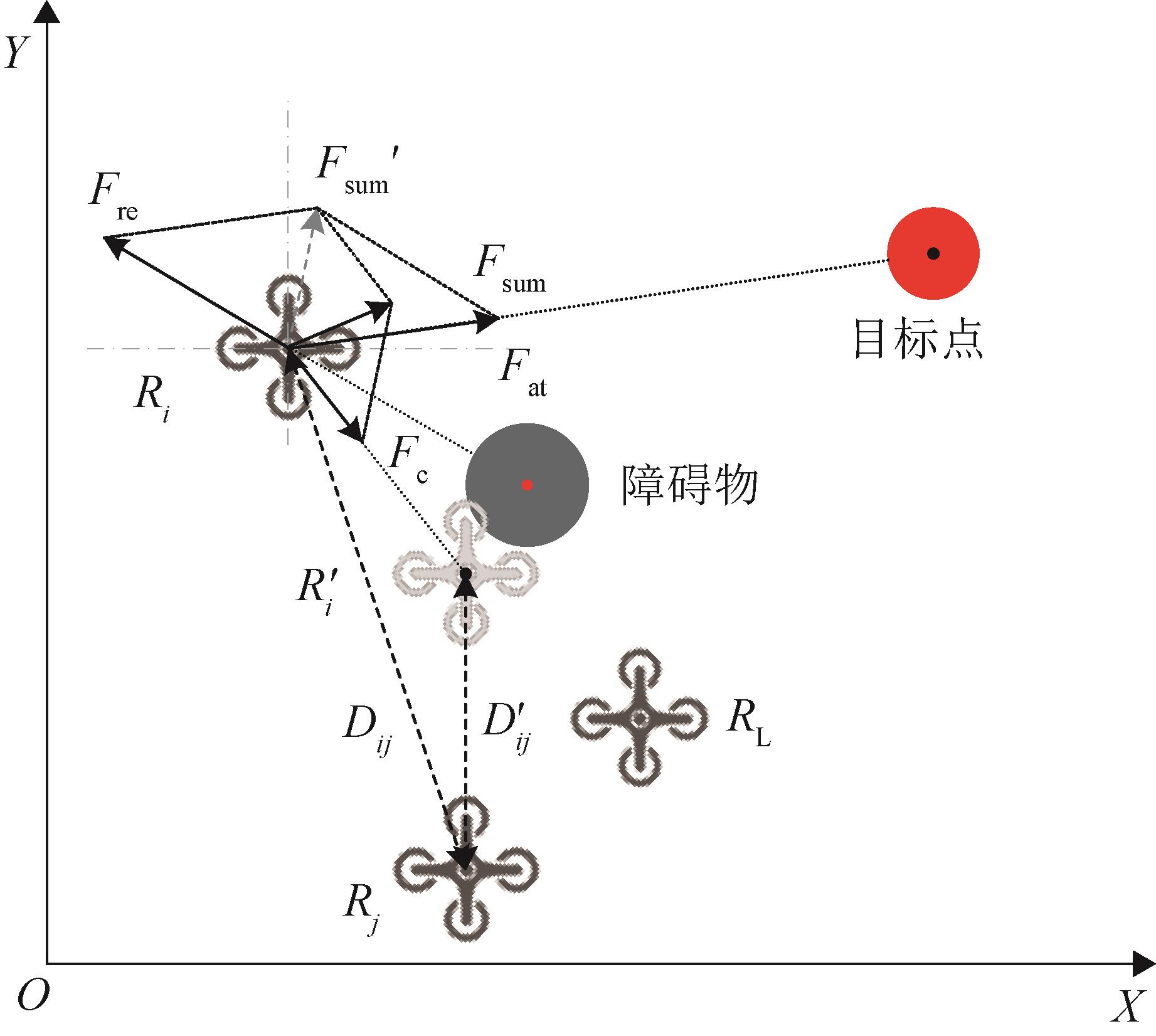
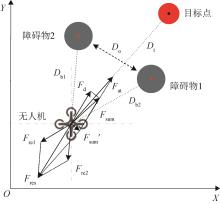
Fig. 7
Artificial potential field method with boundary force
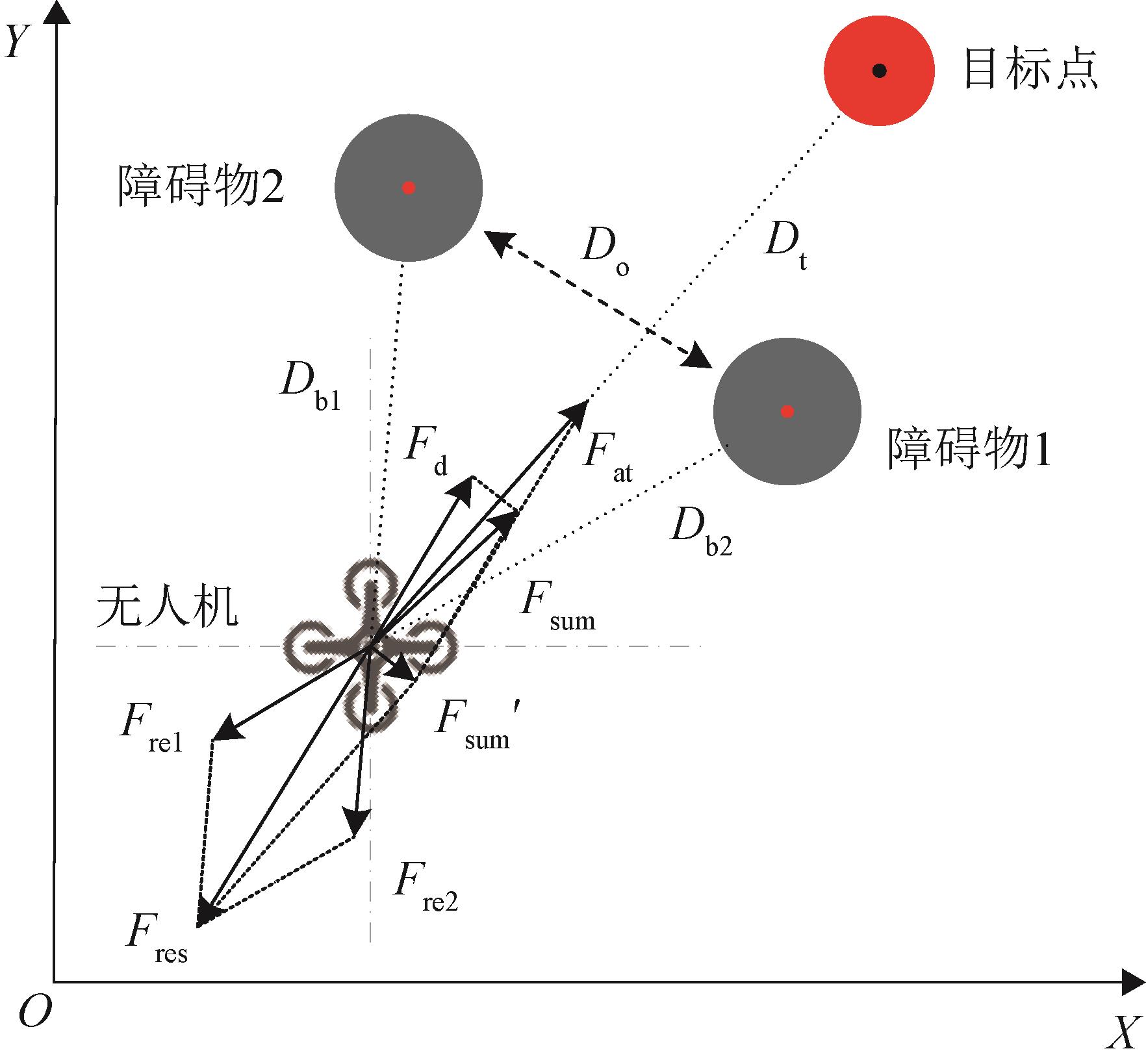

Fig. 8
Trajectory of UAV swarm formation
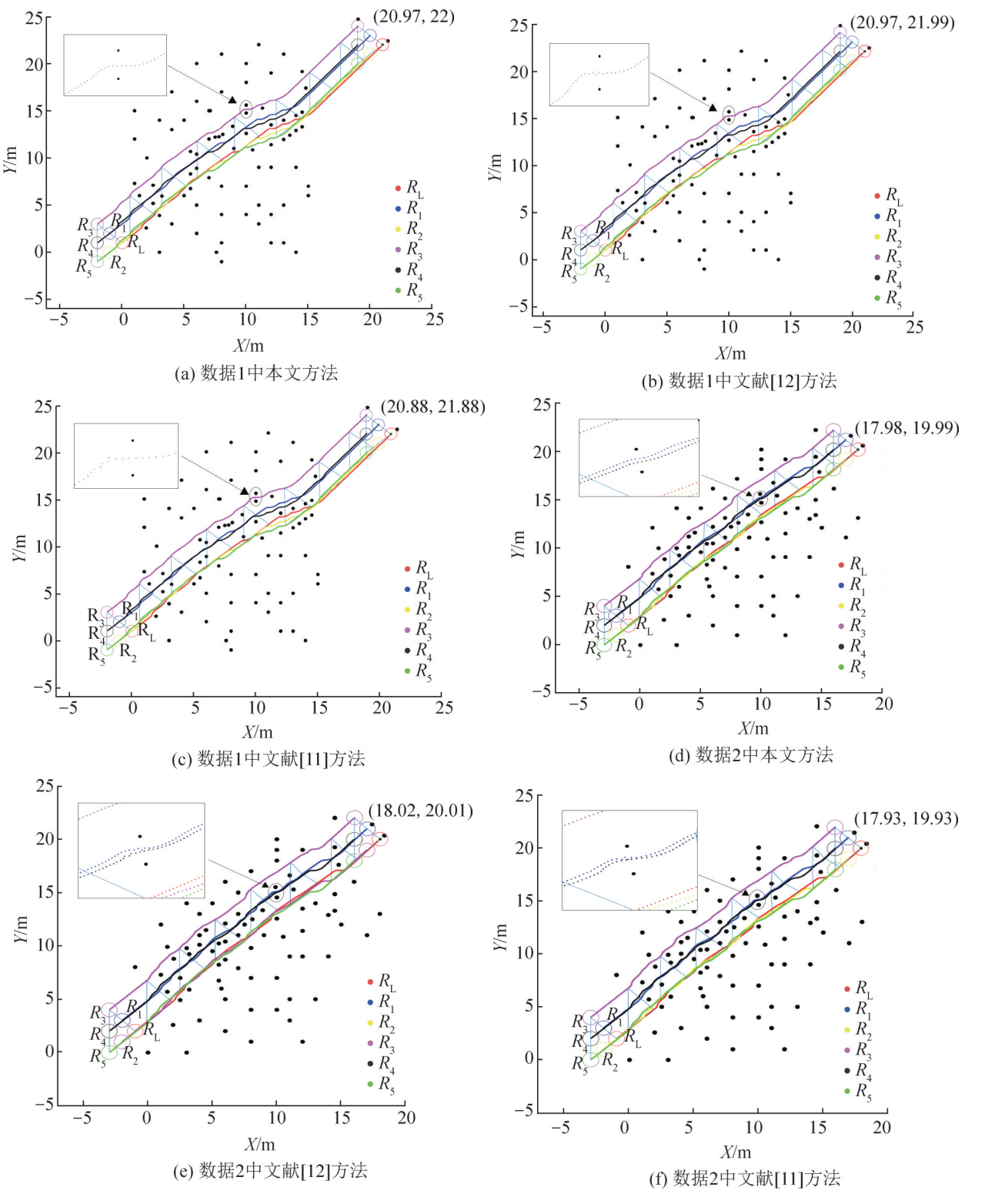
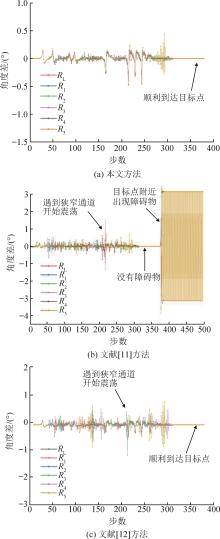
Fig. 9
Flight angle difference curve of UAV swarm
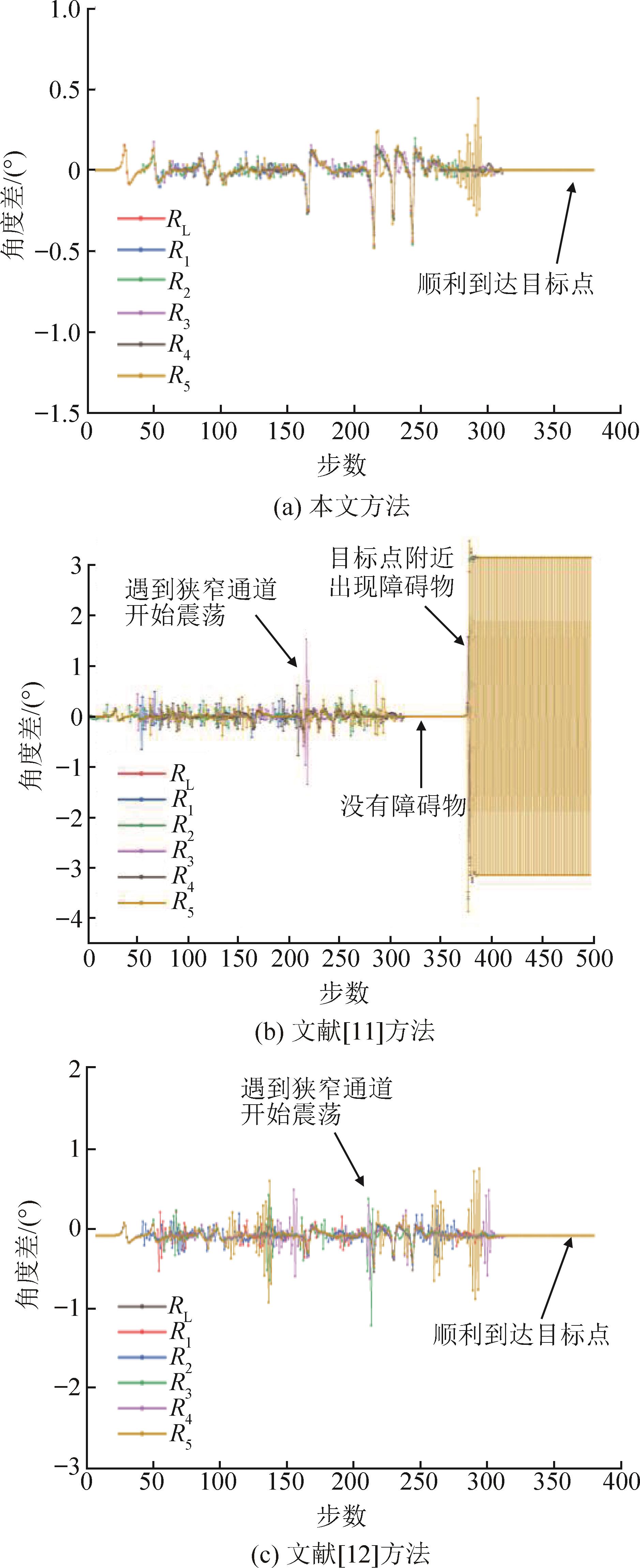

Fig. 10
Distance error between UAV and desired position
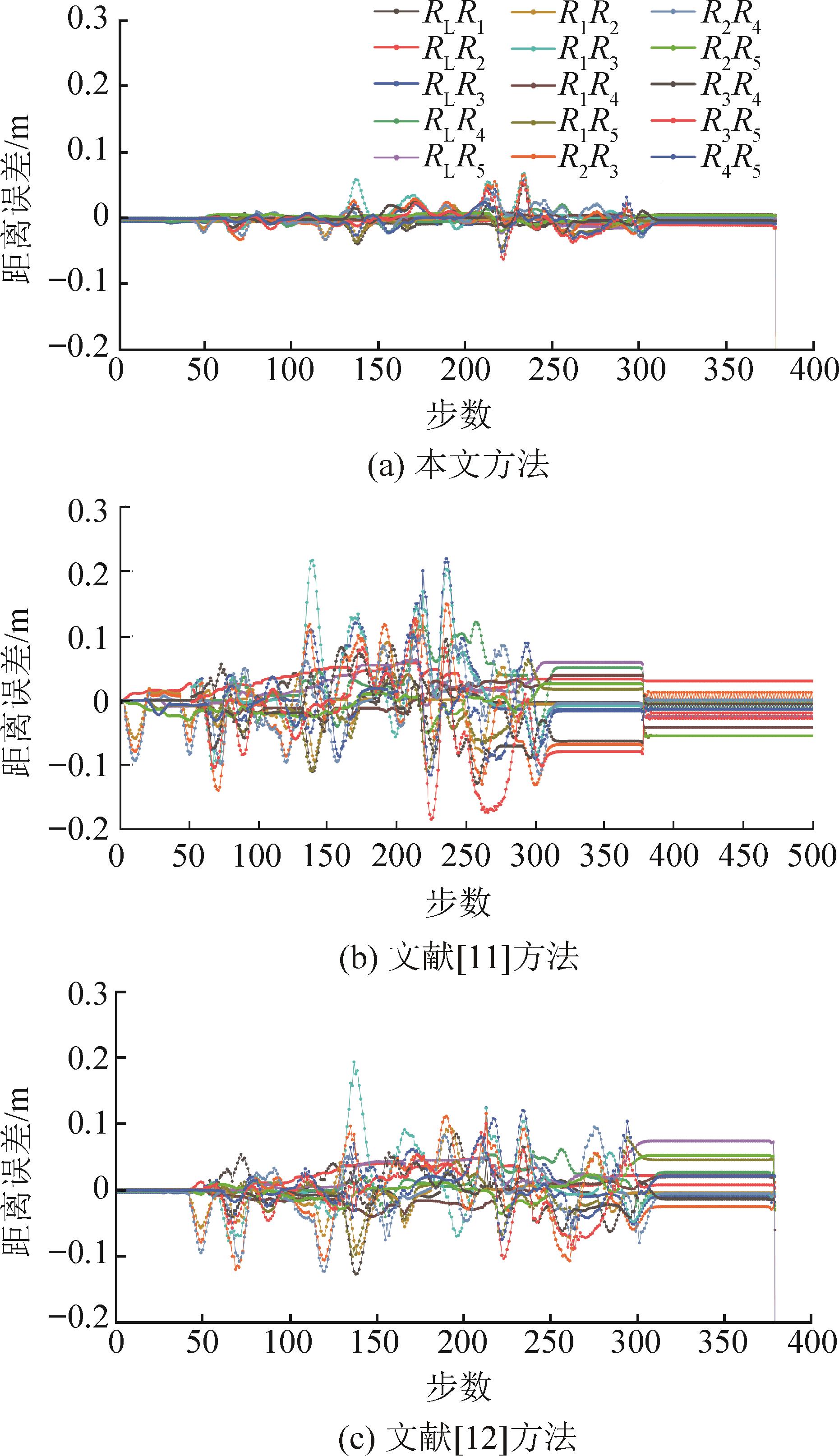
Table 2
Algorithm simulation time
| 次数 | 本文 | 文献[ | 次数 | 本文 | 文献[ |
|---|---|---|---|---|---|
| 1 | 24.45 | 81.23 | 6 | 27.58 | 84.23 |
| 2 | 25.13 | 85.34 | 7 | 27.77 | 85.63 |
| 3 | 25.61 | 79.68 | 8 | 26.68 | 87.61 |
| 4 | 26.54 | 84.53 | 9 | 25.31 | 82.74 |
| 5 | 24.97 | 86.32 | 10 | 26.97 | 88.69 |
| 1 | Aggarwal S, Kumar N. Path Planning Techniques for Unmanned Aerial Vehicles: a Review, Solutions, and Challenges[J]. Computer Communications, 2020, 149: 270-299. |
| 2 | 张丹凝, 程岳, 林清, 等. 无人机集群作战关键技术及发展趋势[J]. 中国新通信, 2022, 24(4): 56-58. |
| Zhang Danning, Cheng Yue, Lin Qing, et al. Key Technologies and Development Trend of UAV Swarm Operation[J]. China New Telecommunications, 2022, 24(4): 56-58. | |
| 3 | 邹立岩, 张明智, 柏俊汝, 等. 无人机集群作战建模与仿真研究综述[J]. 战术导弹技术, 2021(3): 98-108. |
| Zou Liyan, Zhang Mingzhi, Bai Junru, et al. A Survey of Modeling and Simulation of UAS Swarm Operation[J]. Tactical Missile Technology, 2021(3): 98-108. | |
| 4 | 胡利平, 黄晓阳, 梁晓龙, 等. 美军无人机蜂群作战研究动态及应对策略[J]. 国防科技, 2021, 42(4): 17-25. |
| Hu Liping, Huang Xiaoyang, Liang Xiaolong, et al. Research Trends and Countermeasures of American UAV Swarm Warfare[J]. National Defense Science and Technology, 2021, 42 (4): 17-25. | |
| 5 | 齐智敏, 张海林, 伊山, 等. 智能无人机群体作战效能评估指标体系研究[J]. 舰船电子工程, 2021, 41(9): 1-5. |
| Qi Zhimin, Zhang Hailin, Yi Shan, et al. Research on Operational Effectiveness Evaluation Index System of Intelligent UAV Group[J]. Naval Electronic Engineering, 2021, 41(9): 1-5. | |
| 6 | Cai Zhihao, Wang Longhong, Zhao Jiang, et al. Virtual Target Guidance-based Distributed Model Predictive Control for Formation Control of Multiple UAVs[J]. Chinese Journal of Aeronautics, 2020, 33(3): 1037-1056. |
| 7 | Cao Yanfen, Sun Yuangong. Necessary and Sufficient Conditions for Consensus of Third-order Discrete-time Multi-agent Systems in Directed Networks[J]. Journal of Applied Mathematics and Computing, 2018, 57(1): 199-210. |
| 8 | Gao Zhenyu, Guo Ge. Velocity Free Leader-follower Formation Control for Autonomous Underwater Vehicles with Line-of-sight Range and Angle Constraints[J]. Information Sciences, 2019, 486: 359-378. |
| 9 | Amini A, Asif A, Mohammadi A. Formation- containment Control Using Dynamic Event-triggering Mechanism for Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1235-1248. |
| 10 | Tao Han, Guan Zhihong, Ming Chi, et al. Multi-formation Control of Nonlinear Leader-following Multi-agent Systems[J]. ISA Transactions, 2017, 69: 140-147. |
| 11 | 王钦钊, 程金勇, 李小龙. 基于多虚拟领航者的多机器人编队控制方法[J]. 装甲兵工程学院学报, 2017, 31(5): 49-54. |
| Wang Qinzhao, Cheng Jinyong, Li Xiaolong. Formation Control for Multi-robot Based on Multi-virtual Leaders[J]. Journal of Academy of Armored Force Engineering, 2017, 31(5): 49-54. | |
| 12 | 郑延斌, 席鹏雪, 王林林, 等. 基于模糊人工势场法的多智能体编队控制及避障方法[J]. 计算机工程与科学, 2019, 41(8): 1504-1511. |
| Zheng Yanbin, Xi Pengxue, Wang Linlin, et al. A Multi-agent Formation Control and Obstacle Avoidance Method Based on Fuzzy Artificial Potential Field Method[J]. Computer Engineering and Science, 2019, 41(8): 1504-1511. | |
| 13 | 付雷, 秦一杰, 何顶新, 等. 基于改进人工势场法的多机器人编队避障[J]. 控制工程, 2022, 29(3): 388-396. |
| Fu Lei, Qin Yijie, He Dingxin, et al. Obstacle Avoidance in Multi-robot Formation Based on Improved Artificial Potential Field[J]. Control Engineering of China, 2022, 29(3): 388-396. | |
| 14 | 乔勇军, 王思卿. 基于改进的跟随领航者与人工势场的CGF队形控制及避障[J]. 舰船电子工程, 2018, 38(12): 48-51. |
| Qiao Yongjun, Wang Siqing. CGF Formation Control and Obstacle Avoidance Based on Improved Leader- follower and Artificial Potential Field[J]. Ship Electronic Engineering, 2018, 38(12): 48-51. | |
| 15 | 李金芝, 张志安, 程志, 等. 基于全向移动平台的多机器人编队控制研究[J]. 计算机仿真, 2021, 38(2): 326-330, 398. |
| Li Jinzhi, Zhang Zhian, Cheng Zhi, et al. Research on Multi-robot Formation Control Based on Omnidirectional Mobile Platform[J]. Computer Simulation, 2021, 38(2): 326-330, 398. | |
| 16 | 吕晓丹, 吴次南. 改进型模糊神经网络PID控制器的设计与仿真[J]. 数据采集与处理, 2021, 36(2): 365-373. |
| Xiaodan Lü, Wu Cinan. Design and Simulation of Improved Fuzzy Neural Network PID Controller[J]. Journal of Data Acquisition & Processing, 2021, 36(2): 365-373. | |
| 17 | 李庆春, 高军伟, 谢广明, 等. 基于模糊控制的仿生机器鱼避障算法[J]. 兵工自动化, 2011, 30(12): 65-69. |
| Li Qingchun, Gao Junwei, Xie Guangming, et al. Obstacle Avoidance Algorithm of Bionic Robot Fish Based on Fuzzy Control[J]. Ordnance Industry Automation, 2011, 30(12): 65-69. | |
| 18 | KHATIB O. A Unified Approach for Motion and Force of Robot Manipulators[J]. IEEE Journal of Robotics and Automation, 1987, 3(1): 43-53. |
| 19 | 徐钊, 胡劲文, 马云红, 等. 无人机碰撞规避路径规划算法研究[J]. 西北工业大学学报, 2019, 37(1): 100-106. |
| Xu Zhao, Hu Jinwen, Ma Yunhong, et al. A Study on Path Planning Algorithms of UAV Collision Avoidance[J]. Journal of Northwestern Polytechnical University, 2019, 37(1): 100-106. | |
| 20 | 丛玉华, 赵宗豪, 邢长达, 等. 基于改进人工势场的无人机动态避障路径规划[J]. 兵器装备工程学报, 2021, 42(9): 170-176. |
| Cong Yuhua, Zhao Zonghao, Xing Changda, et al. Dynamic Obstacle Avoidance Path Planning of UAV Based on Improved Artificial Potential Field[J]. Journal of Sichuan Ordnance, 2021, 42(9): 170-176. | |
| 21 | Lagunas-Avila J, Castro-Linares R, Alvarez-Gallegos J. Obstacle Avoidance in Leader-follower Formation Using Artificial Potential Field Algorithm[C]//2021 18th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE). Mexico City, Mexico: IEEE, 2021: 1-6. |
| 22 | 陈杨杨, 朱大奇, 李欣. 多AUV的自组织人工势场编队控制方法研究[J]. 控制工程, 2019, 26(10): 1875-1881. |
| Chen Yangyang, Zhu Daqi, Li Xin. Research on the Method of Multi-AUV Formation Control Based on Self-organized Artificial Potential Filed[J]. Control Engineering of China, 2019, 26(10): 1875-1881. | |
| 23 | 王荪馨, 王经国. 一种领航-跟随型多移动机器人编队控制方法[J]. 重型机械, 2019(1): 14-21. |
| Wang Sunxin, Wang Jingguo. An Integrated Method for Multi-robot Formation Based on Leader-follower Mode[J]. Heavy Machinery, 2019(1): 14-21. | |
| 24 | Zhai Haichuan, Ji Zhijian, Gao Junwei. Formation Control of Multiple Robot Fishes Based on Artificial Potential Field and Leader-follower Framework[C]// 2013 25th Chinese Control and Decision Conference (CCDC). Guiyang, China: IEEE, 2013: 2616-2620. |
| [1] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [2] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [3] | Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(3): 782-794. |
| [4] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [5] | Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance [J]. Journal of System Simulation, 2024, 36(3): 545-554. |
| [6] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [7] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| [8] | Li Wenjing, Luo Yanlin, Wang Yuhui, Zhu Li. Virtual Navigation Path Planning Based on Octree Potential Field for Endonasal Endoscope [J]. Journal of System Simulation, 2023, 35(9): 2054-2063. |
| [9] | Junqiang Lin, Hongjun Wang, Xiangjun Zou, Po Zhang, Chengen Li, Yipeng Zhou, Shujie Yao. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO [J]. Journal of System Simulation, 2023, 35(8): 1692-1704. |
| [10] | Junxiao Xue, Xiangyan Kong, Bowei Dong, Hao Tao, Haiyang Guan, Lei Shi, Mingliang Xu. Obstacle Avoidance and Simulation of Carrier-Based Aircraft on the Deck of Aircraft Carrier [J]. Journal of System Simulation, 2023, 35(3): 592-603. |
| [11] | Yuchao Zhang, Yuan Jiang, Jiyang Dai. Dynamic Obstacle Avoidance Control of Three-order Multi-robot Cooperative Formation [J]. Journal of System Simulation, 2022, 34(8): 1762-1774. |
| [12] | Guangjian Tian, Jiyang Dai, Jin Ying, Ning Wang. Multi-UAV Trajectory Planning Based on Adaptive Segmented Potential Field Method [J]. Journal of System Simulation, 2022, 34(11): 2368-2376. |
| [13] | Li Qi, Wang Wei. Path Designing of Multi-omnidirectional Wheel Collaborative Sorting Platform [J]. Journal of System Simulation, 2021, 33(3): 698-709. |
| [14] | Chen Haiyun, Chen Huazhou, Liu Qiang. Multi-UAV 3D Formation Path Planning Based on Improved Artificial Potential Field [J]. Journal of System Simulation, 2020, 32(3): 414-420. |
| [15] | Fu Xiuwen, Yang Yongsheng. Simulation Platform for Invulnerability of Industrial Wireless Sensor Networks [J]. Journal of System Simulation, 2019, 31(7): 1342-1350. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
