

Journal of System Simulation ›› 2022, Vol. 34 ›› Issue (8): 1762-1774.doi: 10.16182/j.issn1004731x.joss.21-0322
• Modeling Theory and Methodology • Previous Articles Next Articles
Yuchao Zhang( ), Yuan Jiang(), Jiyang Dai
), Yuan Jiang(), Jiyang Dai
Received:2021-04-15
Revised:2021-06-09
Online:2022-08-30
Published:2022-08-15
Contact:
Yuan Jiang
E-mail:17862071035@163.com;jiangyuan@nchu.edu.cn
CLC Number:
Yuchao Zhang, Yuan Jiang, Jiyang Dai. Dynamic Obstacle Avoidance Control of Three-order Multi-robot Cooperative Formation[J]. Journal of System Simulation, 2022, 34(8): 1762-1774.
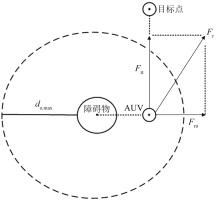
Fig. 1
Traditional potential field method
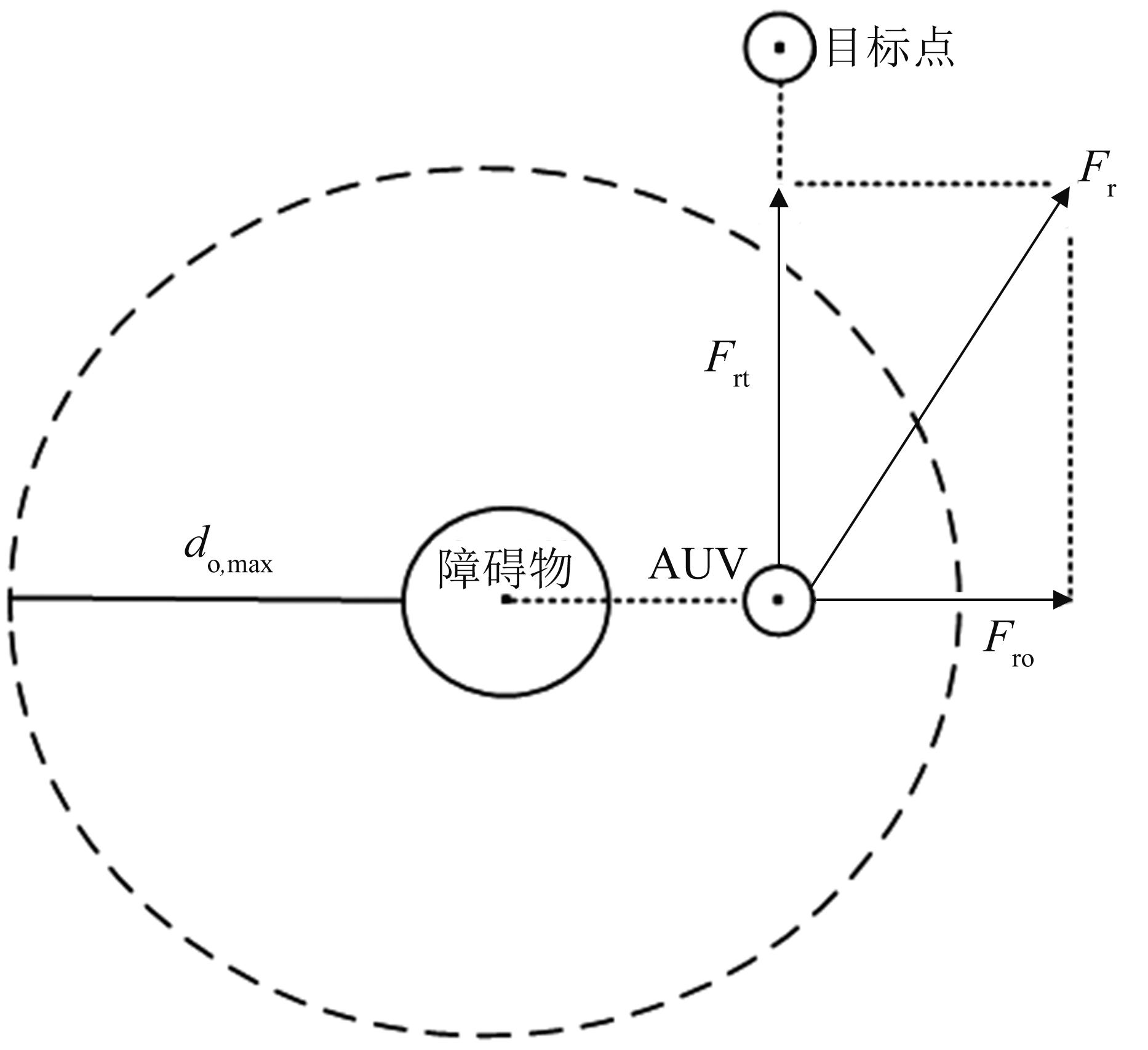

Fig. 2
Auxiliary force
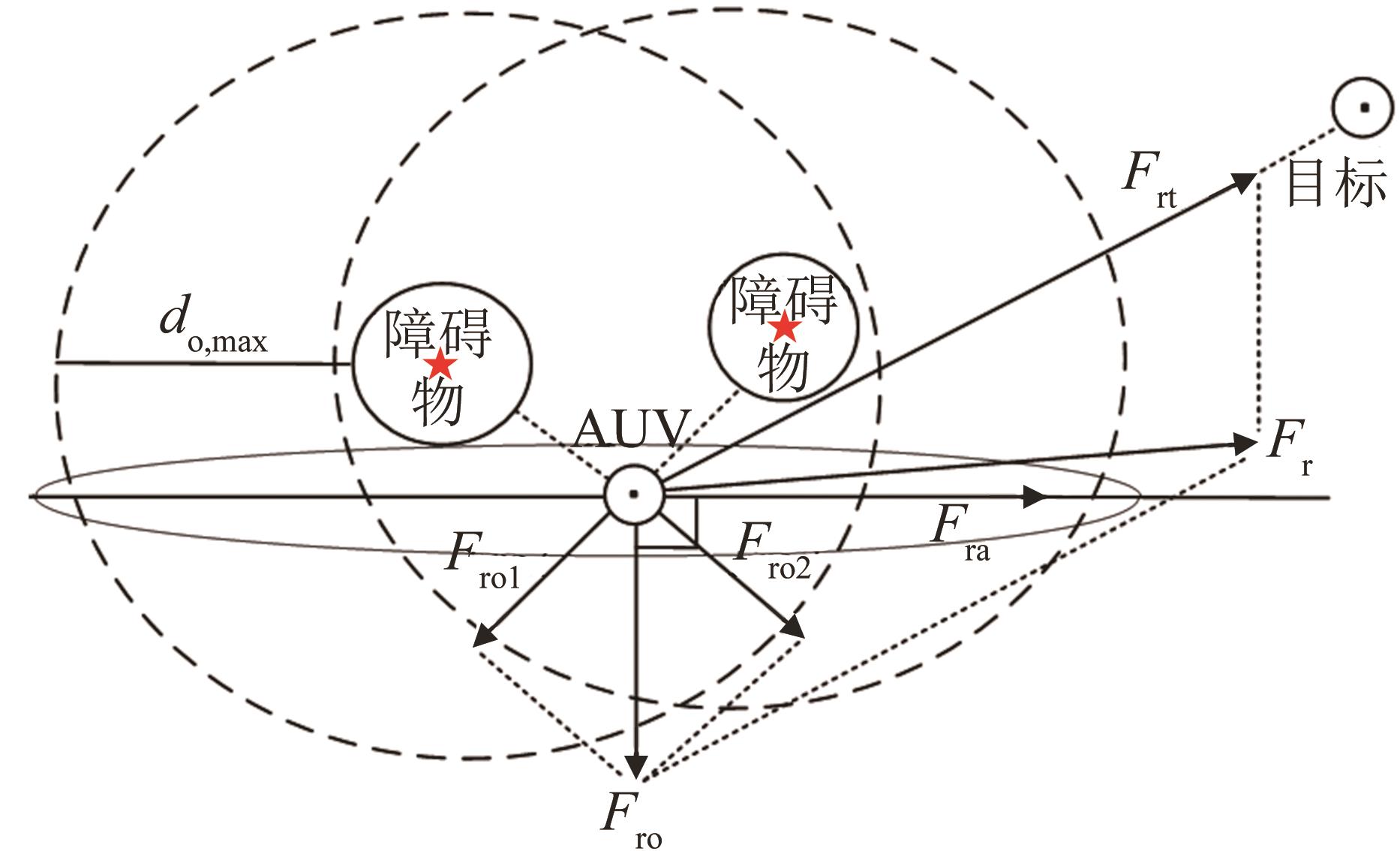
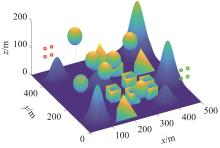
Fig. 3
Simulation environment
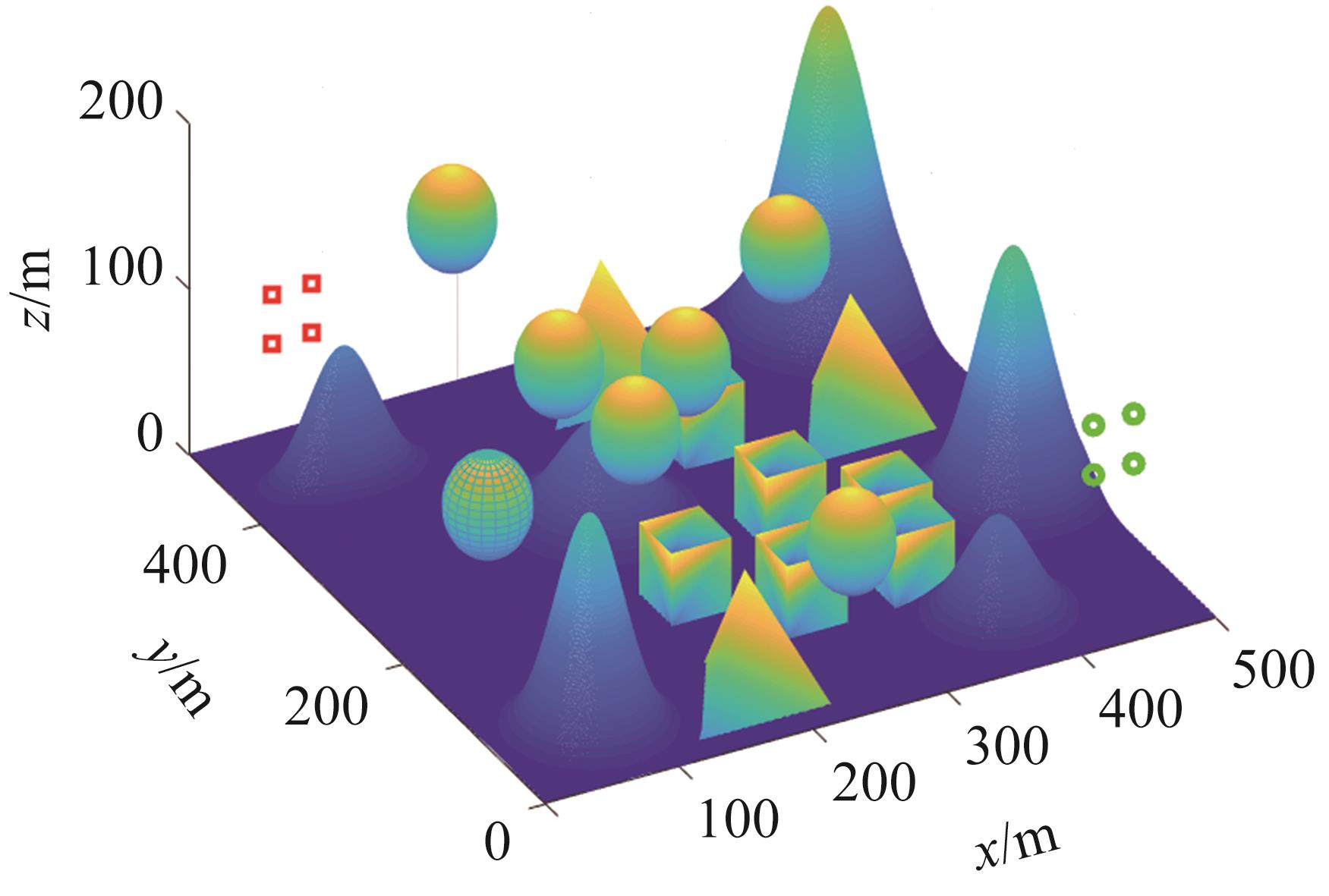
Table 1
Position coordinates of AUV and target point
| 名称 | 编号 | 坐标 |
|---|---|---|
| AUV的起始位置 | 1 | (35, 450, 110) |
| 2 | (65, 450, 80) | |
| 3 | (35, 45, 80) | |
| 4 | (65, 450, 80) | |
| AUV的目标点位置 | 1 | (435, 50, 110) |
| 2 | (465, 50, 110) | |
| 3 | (435, 50, 80) | |
| 4 | (465, 50, 80) |
Table 2
Obstacle position coordinates
| 障碍物 | 编号 | 坐标 |
|---|---|---|
| 正方体 | 1 | (300, 235, 0) |
| 2 | (350, 180, 0) | |
| 3 | (340, 130, 0) | |
| 4 | (260, 130, 0) | |
| 5 | (200, 180,00) | |
| 6 | (300, 350, 0) | |
| 锥体 | 1 | (175, 50, 0) |
| 2 | (400, 325, 0) | |
| 3 | (275, 440, 0) | |
| 球体 | 1 | (190, 231, 110) |
| 2 | (175, 310, 120) | |
| 3 | (260, 292, 110) | |
| 4 | (175, 460, 120) | |
| 5 | (260, 60, 75) | |
| 6 | (370, 360, 100) | |
| 数学函数模型 | 1 | (450, 450, 190) |
| 2 | (200, 300, 60) | |
| 3 | (75, 425, 80) | |
| 4 | (375, 70, 60) | |
| 5 | (455, 200, 150) | |
| 6 | (70, 70, 130) |
Table 3
Parameter data table
| 参数 | 数值 |
|---|---|
1.0 3.0 | |
| δ | 0.1 |
| ζ | 350 |
| 0.15 | |
| 15 | |
| 0.1 | |
| 0.5 |
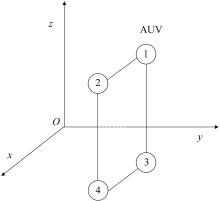
Fig. 4
AUV formation communication network topology
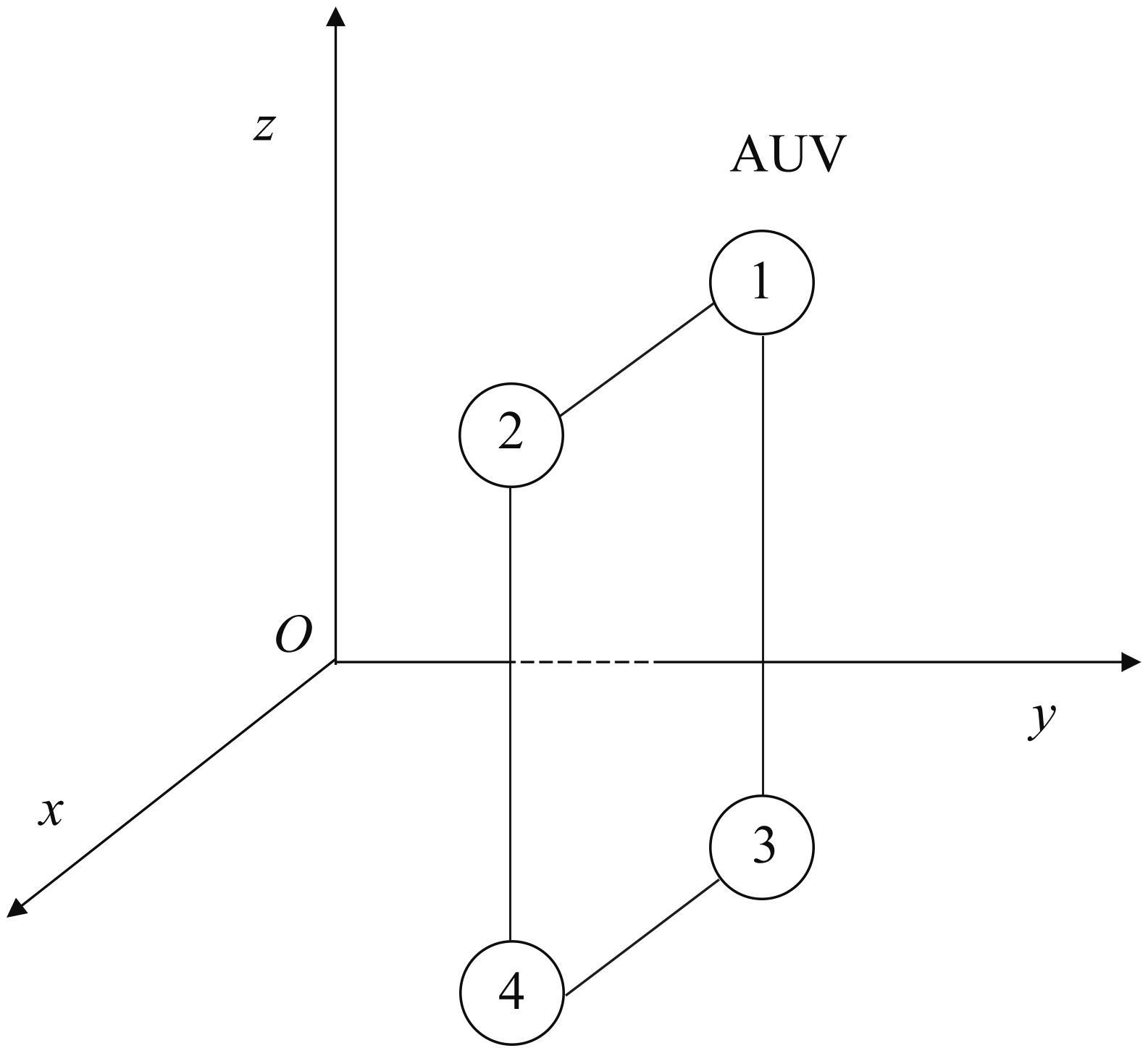
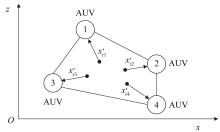
Fig. 5
Schematic diagram of unstable formation
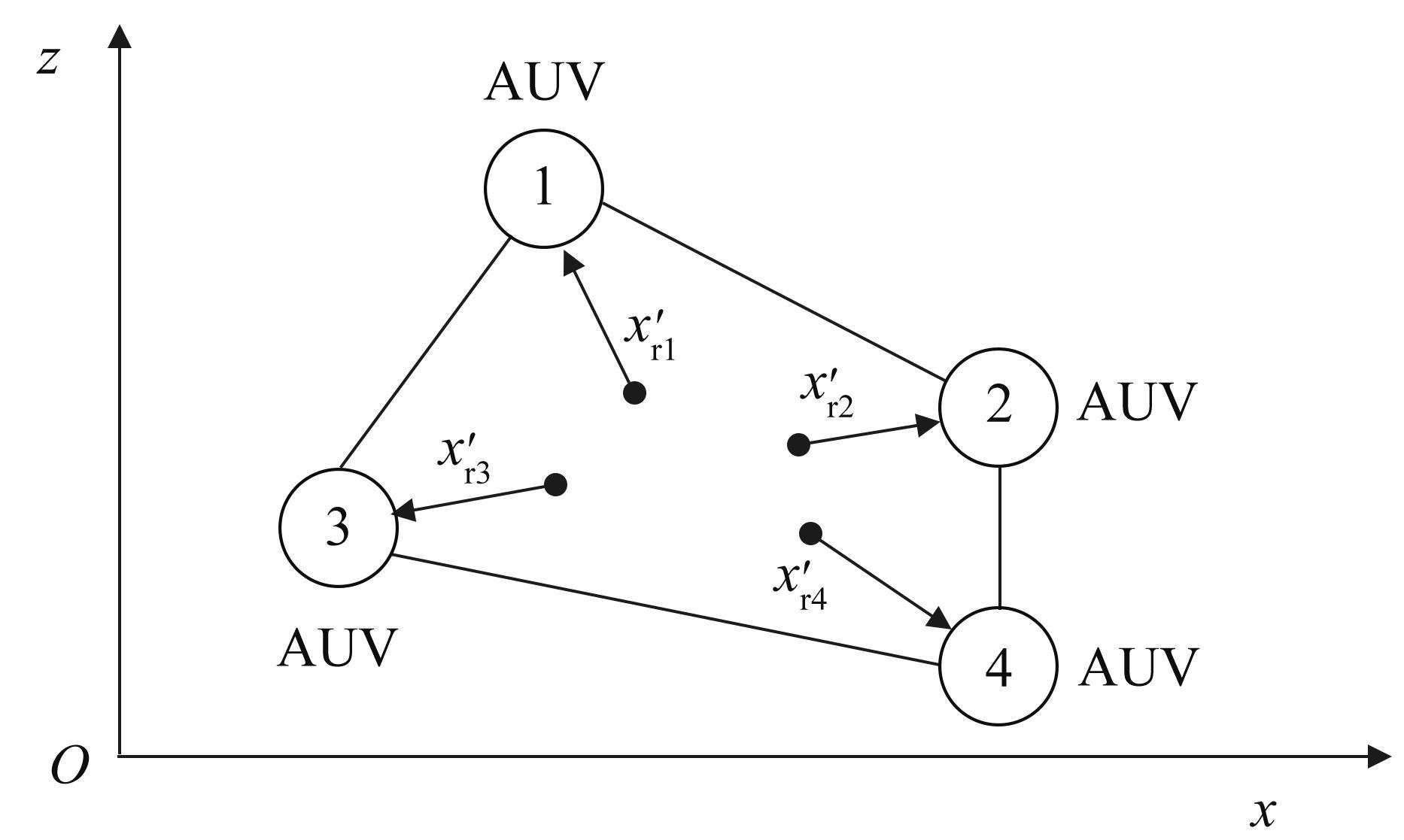
Fig. 6
Schematic diagram of formation stability
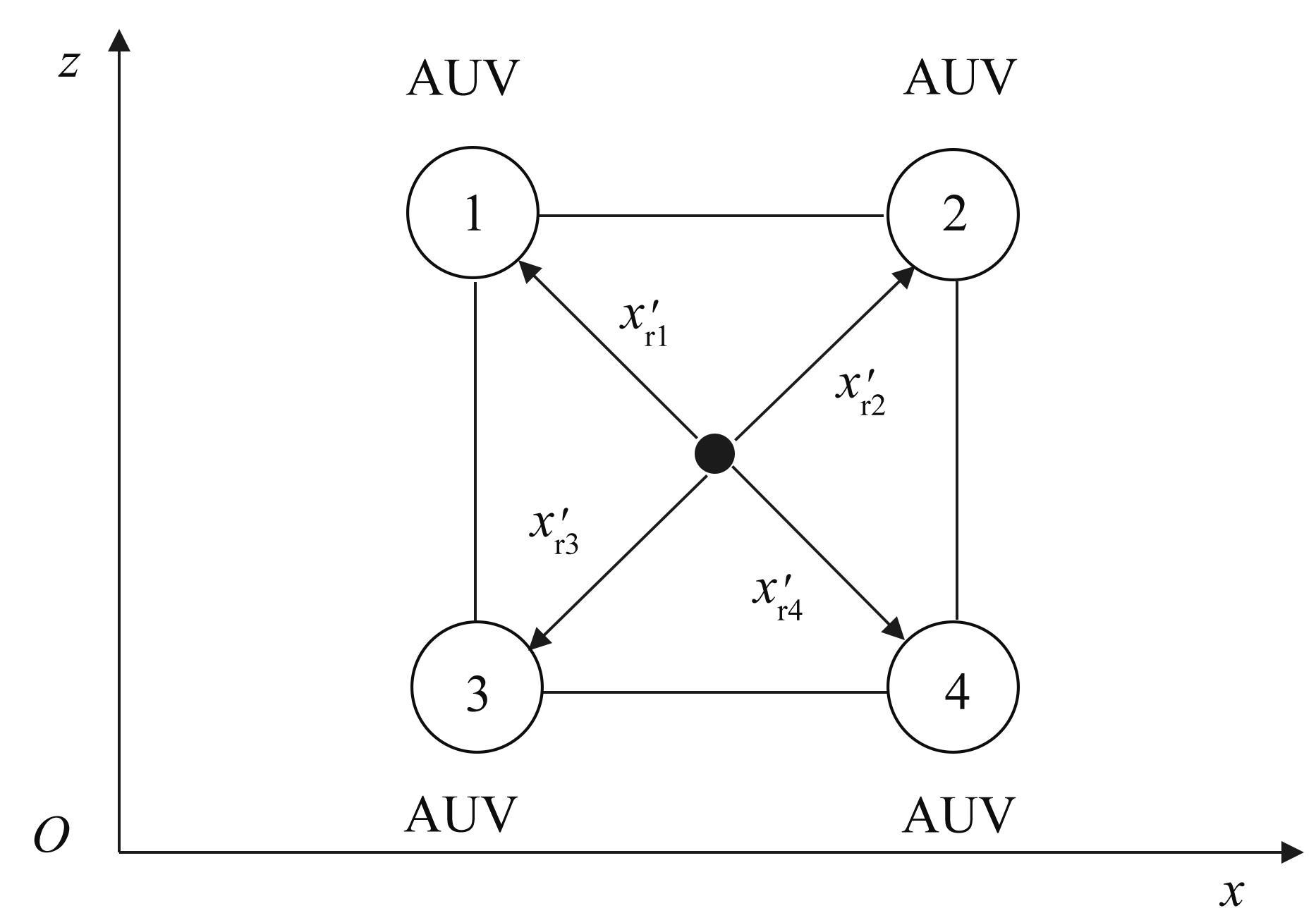

Fig. 7
Schematic diagram of formation paths under different algorithms
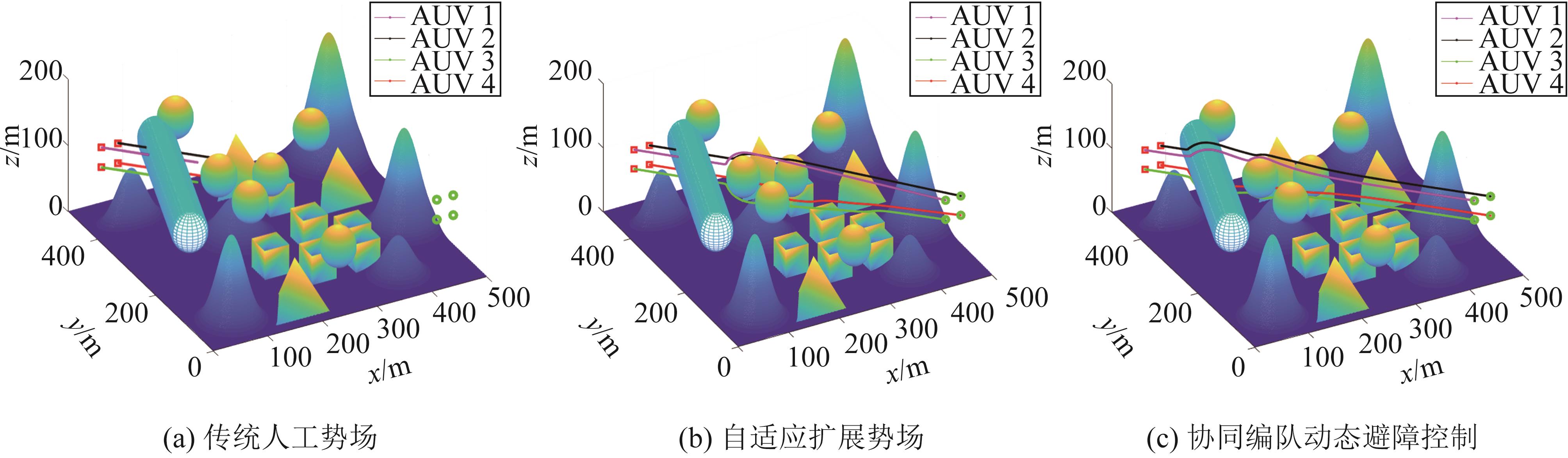

Fig. 8
Speed curve under different algorithms
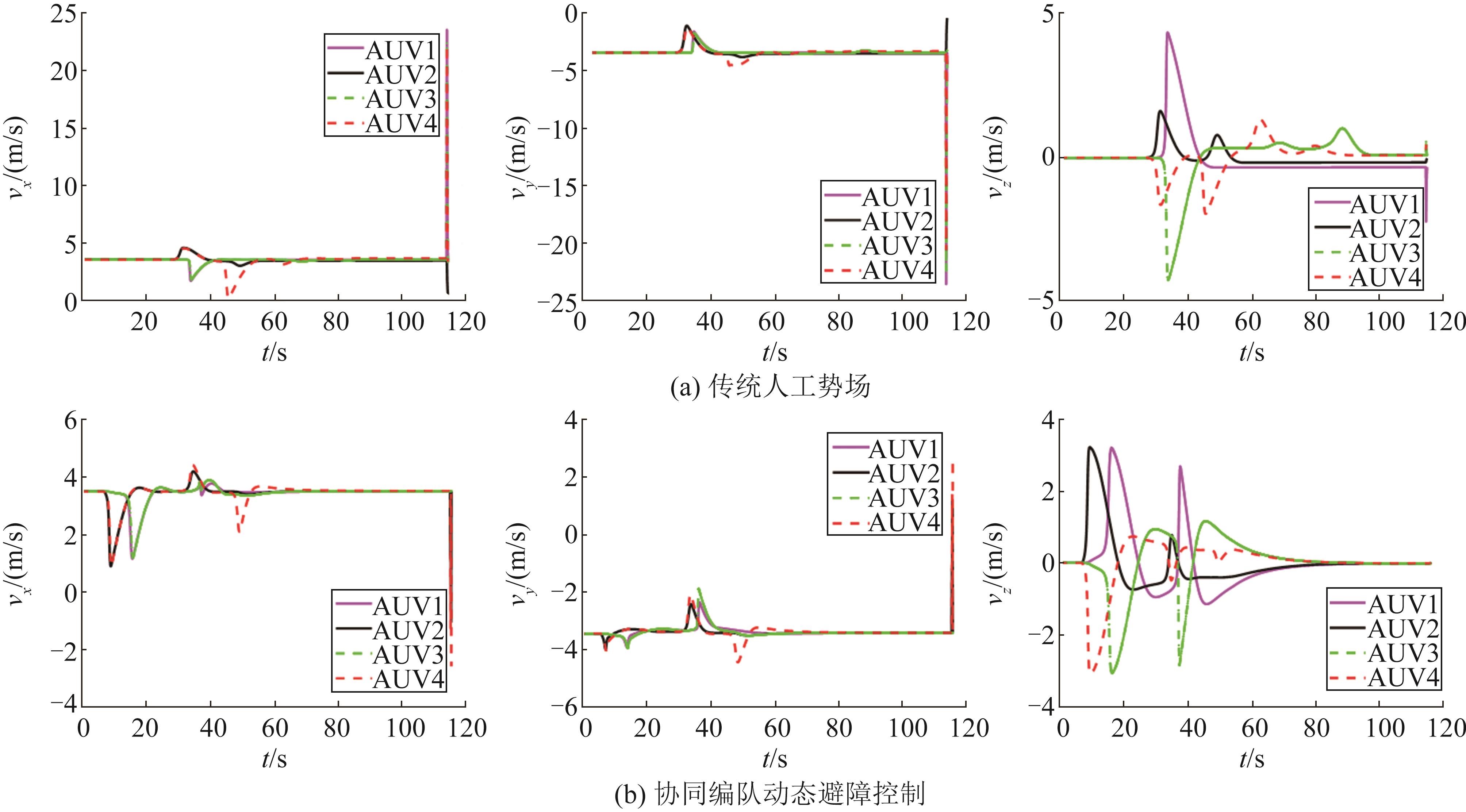
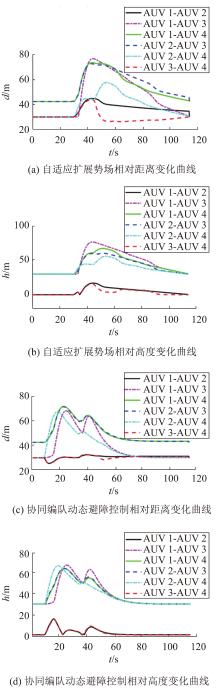
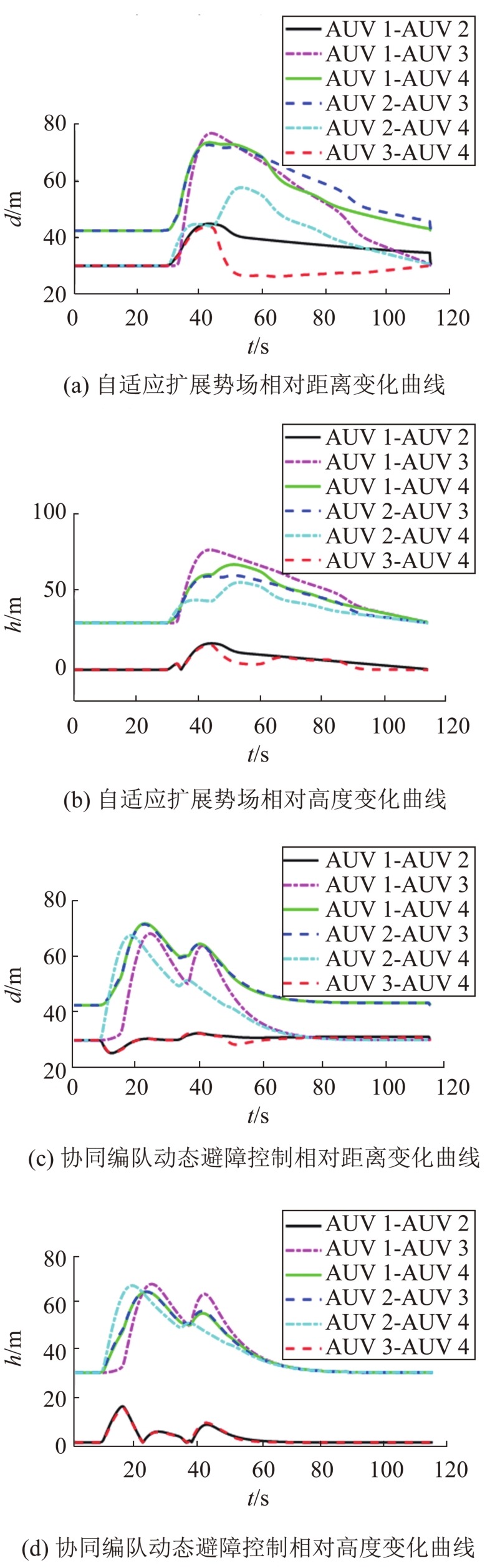
Fig. 9
Position change curve under different algorithms
| 1 | Cui R, Ge S S, Voon Ee How B, et al. Leader-Follower Formation Control of Underactuated Autonomous Underwater Vehicles[J]. Ocean Engineering(S0029-8018), 2010, 37(17/18): 1491-1502. |
| 2 | Ma Lifeng, Wang Zidong, Han Qinglong, et al. Consensus Control of Stochastic Multi-Agent Systems: a Survey[J]. Science China (Information Sciences) (S1674-733X), 2017, 60(12): 5-19. |
| 3 | Hu Jinglin, Sun Xiuxia, He Lei. Time-Varying Formation Tracking for Multiple UAVs with Nonholonomic Constraints and Input Quantization Via Adaptive Backstepping Control [J]. International Journal of Aeronautical and Space Sciences(S2093-274X), 2019, 20(3): 710-721. |
| 4 | Wang Wei. A New Formation Control Strategy Based on the Virtual-Leader-Follower and Artificial Potential Field [C]//34rd Youth Academic Annual Conference of Chinese Association of Automation (YAC). Jinzhou, China: IEEE, 2019: 485-492. |
| 5 | 李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37(11): 2423-2431. |
| Li Zhengping, Xian Bin. Robust Distributed Formation Control of Multiple Unmanned Aerial Vehicles Based on Virtual Structure [J]. Control Theory & Applications, 2020, 37(11): 2423-2431. | |
| 6 | Lee Giroung, Chwa Dongkyoung. Decentralized Behavior-Based Formation Control of Multiple Robots Considering Obstacle Avoidance[J]. Intelligent Service Robotics(S1861-2776), 2018, 11(1): 127-138. |
| 7 | 马小陆, 梅宏. 基于改进势场蚁群算法的移动机器人全局路径规划[J]. 机械工程学报, 2021, 57(1): 19-27. |
| Ma Xiaolu, Mei Hong. Mobile Robot Global Path Planning Based on Improved Ant Colony System Algorithm with Potential Field [J]. Journal of Mechanical Engineering, 2021, 57(1): 19-27. | |
| 8 | 李卫硕, 孙剑, 陈伟. 基于BP神经网络机器人实时避障算法[J]. 仪器仪表学报, 2019, 40(11): 204-211. |
| Li Weishuo, Sun Jian, Chen Wei. Real-Time Obstacle Avoidance Algorithm for Robots Based on BP Neural Network [J]. Chinese Journal of Scientific Instrument, 2019, 40(11): 204-211. | |
| 9 | 祁若龙, 周维佳, 刘金国, 等. 基于概率论的机器人高斯运动避障轨迹规划方法[J]. 机械工程学报, 2017, 53(5): 93-100. |
| Qi Ruolong, Zhou Weijia, Liu Jinguo, et al. Obstacle Avoidance Trajectory Planning for Gaussian Motion of Robot Based on Probability Theory [J]. Journal of Mechanical Engineering, 2017, 53(5): 93-100. | |
| 10 | Zhang J, Yan J, Zhang P. Fixed-Wing UAV Formation Control Design with Collision Avoidance Based on an Improved Artificial Potential Field[J]. IEEE Access (S2169-3536), 2018, 6: 78342-78351. |
| 11 | Wang Hongbo, Chen Li, Zhang Weihua. Lane-Keeping Control Based on an Improved Artificial Potential Method and Coordination of Steering/Braking Systems[J]. IET Intelligent Transport Systems (S1751-956X), 2019, 13(12): 1832-1842. |
| 12 | 张强, 陈兵奎, 刘小雍, 等. 基于改进势场蚁群算法的移动机器人最优路径规划[J]. 农业机械学报, 2019, 50(5): 23-32, 42. |
| Zhang Qiang, Chen Bingkui, Liu Xiaoyong, et al. Ant Colony Optimization with Improved Potential Field Heuristicfor Robot Path Planning [J]. Transactions of the Chinese Society of Agricultural Machinery, 2019, 50(5): 23-32, 42. | |
| 13 | 代冀阳, 王村松, 殷林飞, 等.飞行器分层势场路径规划算法[J]. 控制理论与应用, 2015, 32(11): 1505-1510. |
| Dai Jiyang, Wang Cunsong, Yin Linfei, et al. Hierarchical Potential Field Algorithm of Path Planning for Aircraft[J]. Control Theory and Applications, 2015, 32(11): 1505-1510. | |
| 14 | Cao Yanfen, Sun Yuangong. Necessary and Sufficient Conditions for Consensus of Third-Order Discrete-Time Multi-Agent Systems in Directed Networks[J]. Journal of Applied Mathematics and Computing(S1598-5865), 2018, 57(1/2): 199-210. |
| 15 | Wang J, Leone R D, Fu S, et al. Event-Triggered Control Design for Networked Evolutionary Games with Time Invariant Delay in Strategies[J]. International Journal of Systems Science(S0020-7721), 2021, 52(3): 493-504. |
| 16 | Marius E Yamakou. Chaotic Synchronization of Memristive Neurons: Lyapunov Function Versus Hamilton Function[J]. Nonlinear Dynamics(S0924-090X), 2020, 101: 487-500. |
| 17 | Khatib O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots[J]. International Journal of Robotics Research(S0278-3649), 1986, 5(1): 90-98. |
| 18 | 王宁, 代冀阳, 应进, 等. 基于自适应扩展势场的多无人机航迹规划仿真[J]. 系统仿真学报, 2021, 33(9): 2147-2156. |
| Wang Ning, Dai Jiyang, Ying Jin, et al. Multi-UAV Trajectory Planning Simulation Based on Adaptive Extended Potential Field [J]. Journal of System Simulation, 2021, 33(9): 2147-2156. |
| [1] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [2] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [3] | Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(3): 782-794. |
| [4] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [5] | Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance [J]. Journal of System Simulation, 2024, 36(3): 545-554. |
| [6] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [7] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| [8] | Li Wenjing, Luo Yanlin, Wang Yuhui, Zhu Li. Virtual Navigation Path Planning Based on Octree Potential Field for Endonasal Endoscope [J]. Journal of System Simulation, 2023, 35(9): 2054-2063. |
| [9] | Wang Man, Li Dapeng, Ding Lianghui, Zhu Tianlin. Formation Obstacle Avoidance Algorithm Based on Joint Virtual Sub-target and Boundary Force [J]. Journal of System Simulation, 2023, 35(9): 1918-1930. |
| [10] | Junqiang Lin, Hongjun Wang, Xiangjun Zou, Po Zhang, Chengen Li, Yipeng Zhou, Shujie Yao. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO [J]. Journal of System Simulation, 2023, 35(8): 1692-1704. |
| [11] | Junxiao Xue, Xiangyan Kong, Bowei Dong, Hao Tao, Haiyang Guan, Lei Shi, Mingliang Xu. Obstacle Avoidance and Simulation of Carrier-Based Aircraft on the Deck of Aircraft Carrier [J]. Journal of System Simulation, 2023, 35(3): 592-603. |
| [12] | Guangjian Tian, Jiyang Dai, Jin Ying, Ning Wang. Multi-UAV Trajectory Planning Based on Adaptive Segmented Potential Field Method [J]. Journal of System Simulation, 2022, 34(11): 2368-2376. |
| [13] | Li Qi, Wang Wei. Path Designing of Multi-omnidirectional Wheel Collaborative Sorting Platform [J]. Journal of System Simulation, 2021, 33(3): 698-709. |
| [14] | Chen Haiyun, Chen Huazhou, Liu Qiang. Multi-UAV 3D Formation Path Planning Based on Improved Artificial Potential Field [J]. Journal of System Simulation, 2020, 32(3): 414-420. |
| [15] | Fu Xiuwen, Yang Yongsheng. Simulation Platform for Invulnerability of Industrial Wireless Sensor Networks [J]. Journal of System Simulation, 2019, 31(7): 1342-1350. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
