

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (5): 1086-1097.doi: 10.16182/j.issn1004731x.joss.22-0084
• Papers • Previous Articles Next Articles
Yuwen Wu1( ), Zhiyue Niu2, Zhenping Li1()
), Zhiyue Niu2, Zhenping Li1()
Received:2022-01-26
Revised:2022-04-17
Online:2023-05-30
Published:2023-05-22
Contact:
Zhenping Li
E-mail:wyw_324@163.com;lizhenping66@163.com
CLC Number:
Yuwen Wu, Zhiyue Niu, Zhenping Li. Picking Path Planning of Container Robots Based on Improved Genetic Algorithm[J]. Journal of System Simulation, 2023, 35(5): 1086-1097.
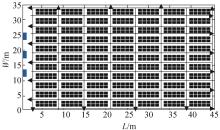
Fig. 1
Introduction of intelligent warehouse
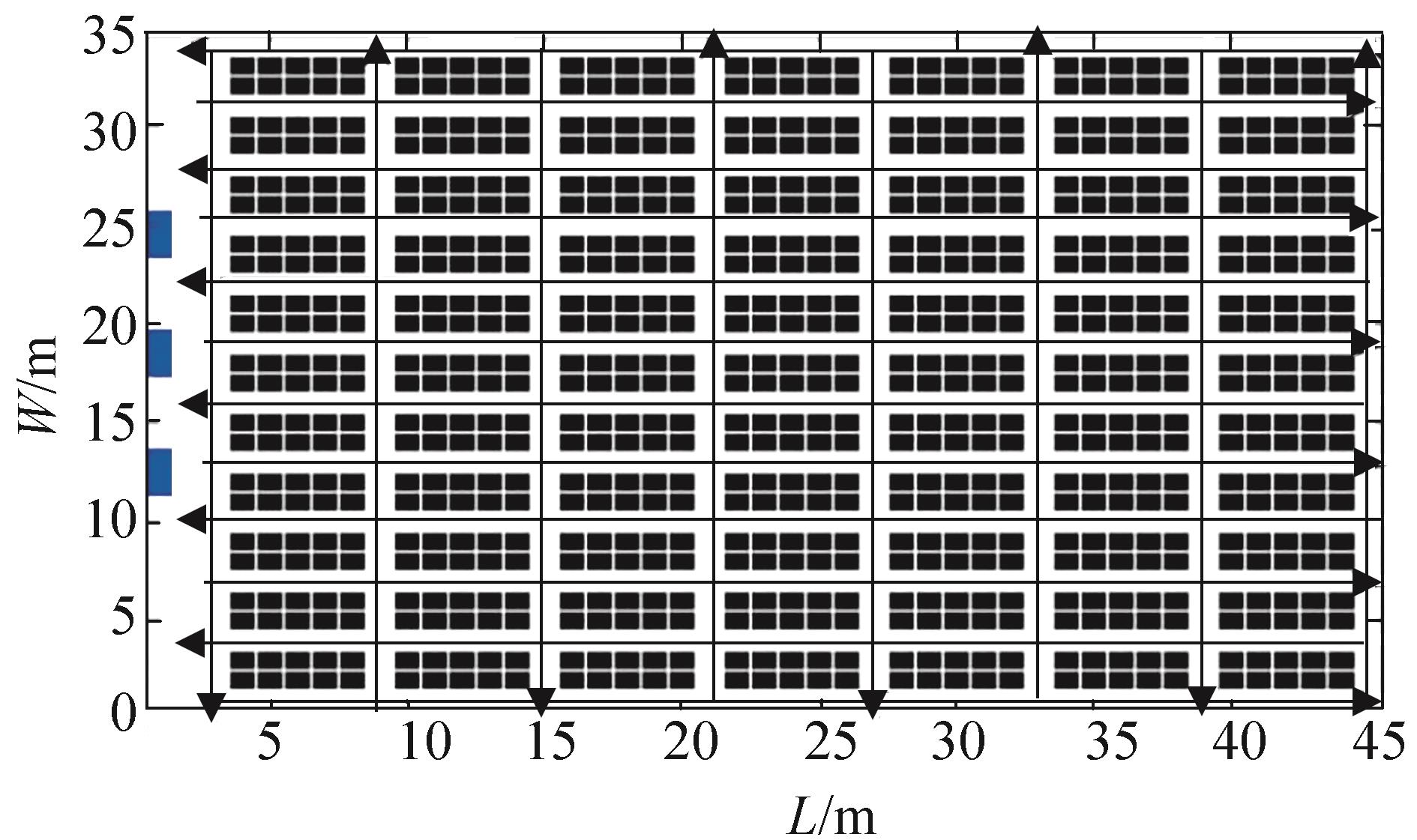

Fig. 2
Container robot for picking

Fig. 3
Diagram of partially mapped crossover
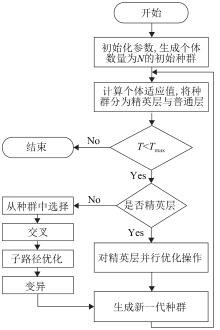
Fig. 4
Algorithm flow chart
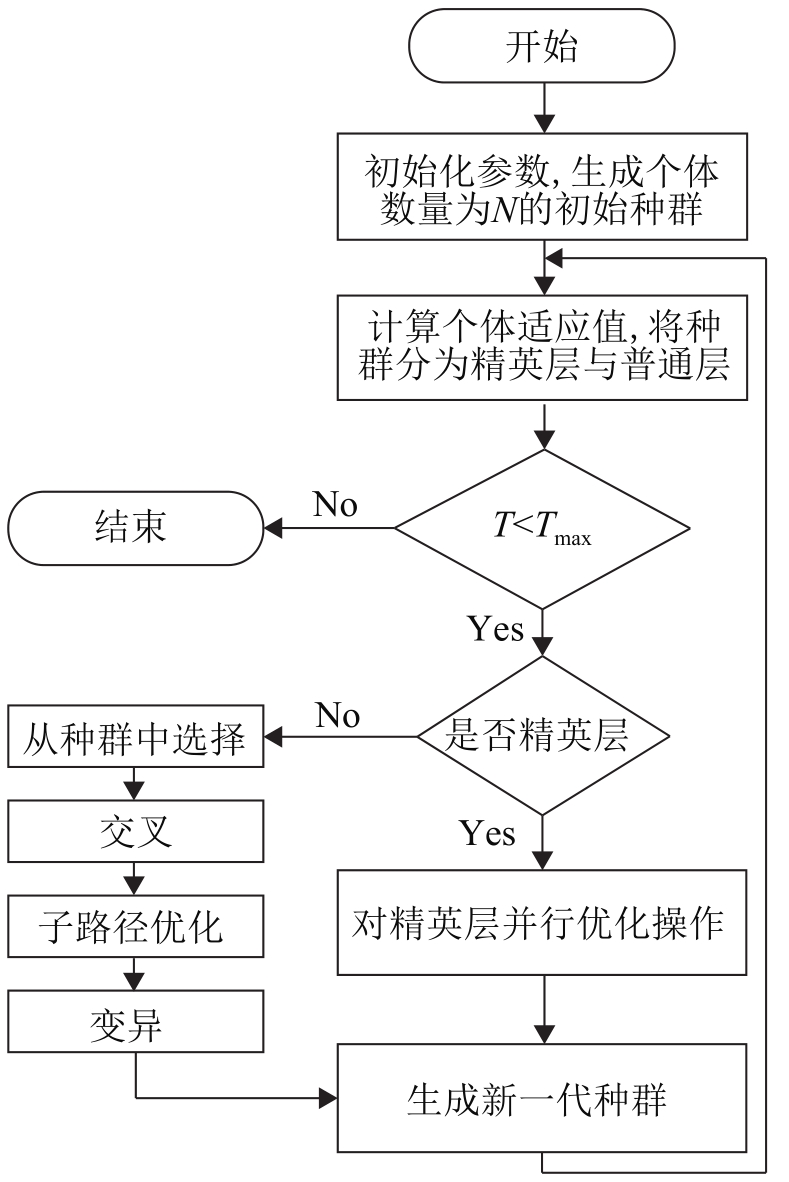
Table 1
Distance matrix between picking table and some picking points
| D | 0 | 1 | 2 | 3 | 4 | 5 | 6 | … |
|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 56 | 46 | 49 | 54 | 57 | 40 | |
| 1 | 40 | 0 | 30 | 33 | 38 | 41 | 24 | |
| 2 | 54 | 30 | 0 | 21 | 26 | 29 | 24 | |
| 3 | 45 | 39 | 15 | 0 | 23 | 26 | 21 | |
| 4 | 58 | 34 | 22 | 13 | 0 | 21 | 28 | |
| 5 | 49 | 43 | 19 | 22 | 15 | 0 | 25 | |
| 6 | 52 | 24 | 24 | 27 | 32 | 35 | 0 | |
| … | ||||||||
| 29 | 31 | 55 | 31 | 34 | 39 | 42 | 37 | |
| 30 | 54 | 30 | 1 | 21 | 26 | 29 | 24 |
Table 2
Solution results of hybrid genetic algorithm
机器人 编号 | 路径 | 路径长度/m | 完成时间/s |
|---|---|---|---|
| 目标值 | 591 | 125 | |
| 1 | 0-13-6-18-12-1-0 | 116 | 116 |
| 2 | 0-17-21-4-3-24-0 | 116 | 116 |
| 3 | 0-28-25-8-26-23-0 | 90 | 90 |
| 4 | 0-9-10-29-20-16-0 | 70 | 70 |
| 5 | 0-11-27-22-15-19-0 | 74 | 74 |
| 6 | 0-30-2-14-5-7-0 | 125 | 125 |
Table 3
Solution results of four algorithms
| 算法 | 机器人编号 | 路径 | 路径长度/m | 完成时间/s |
|---|---|---|---|---|
SA- GA | 1 | 0-6-18-12-8-1-0 | 140 | 140 |
| 2 | 0-27-16-15-20-9-0 | 94 | 94 | |
| 3 | 0-10-29-30-2-14-0 | 101 | 101 | |
| 4 | 0-28-26-25-24-19-0 | 108 | 108 | |
| 5 | 0-11-23-17-21-7-0 | 88 | 88 | |
| 6 | 0-22-13-5-4-3-0 | 140 | 140 | |
| 目标值 | 671 | 140 | ||
| SA | 1 | 0-9-2-25-16-20-0 | 108 | 108 |
| 2 | 0-11-21-14-5-4-0 | 124 | 124 | |
| 3 | 0-30-17-6-22-8-0 | 124 | 124 | |
| 4 | 0-23-12-28-10-18-0 | 98 | 98 | |
| 5 | 0-7-19-13-27-24-0 | 116 | 116 | |
| 6 | 0-29-26-31-3-15 | 123 | 123 | |
| 目标值 | 693 | 124 | ||
| GA | 1 | 0-14-7-19-13-2-0 | 116 | 116 |
| 2 | 0-10-30-21-17-3-0 | 118 | 118 | |
| 3 | 0-6-5-15-31-4-0 | 160 | 160 | |
| 4 | 0-20-12-28-16-24-0 | 74 | 74 | |
| 5 | 0-18-22-8-11-23-0 | 94 | 94 | |
| 6 | 0-29-26-9-27-25-0 | 108 | 108 | |
| 目标值 | 670 | 160 | ||
| CW | 1 | 0-27-9-13-19-2-0 | 162 | 162 |
| 2 | 0-5-3-31-15-7-0 | 159 | 159 | |
| 3 | 0-14-25-4-6-17-0 | 178 | 178 | |
| 4 | 0-30-21-16-26-29-0 | 122 | 122 | |
| 5 | 0-18-22-8-11-10-0 | 72 | 72 | |
| 6 | 0-12-28-23-24-20-0 | 86 | 86 | |
| 目标值 | 779 | 178 | ||
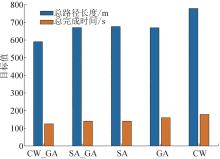
Fig. 5
Comparison of different algorithm results
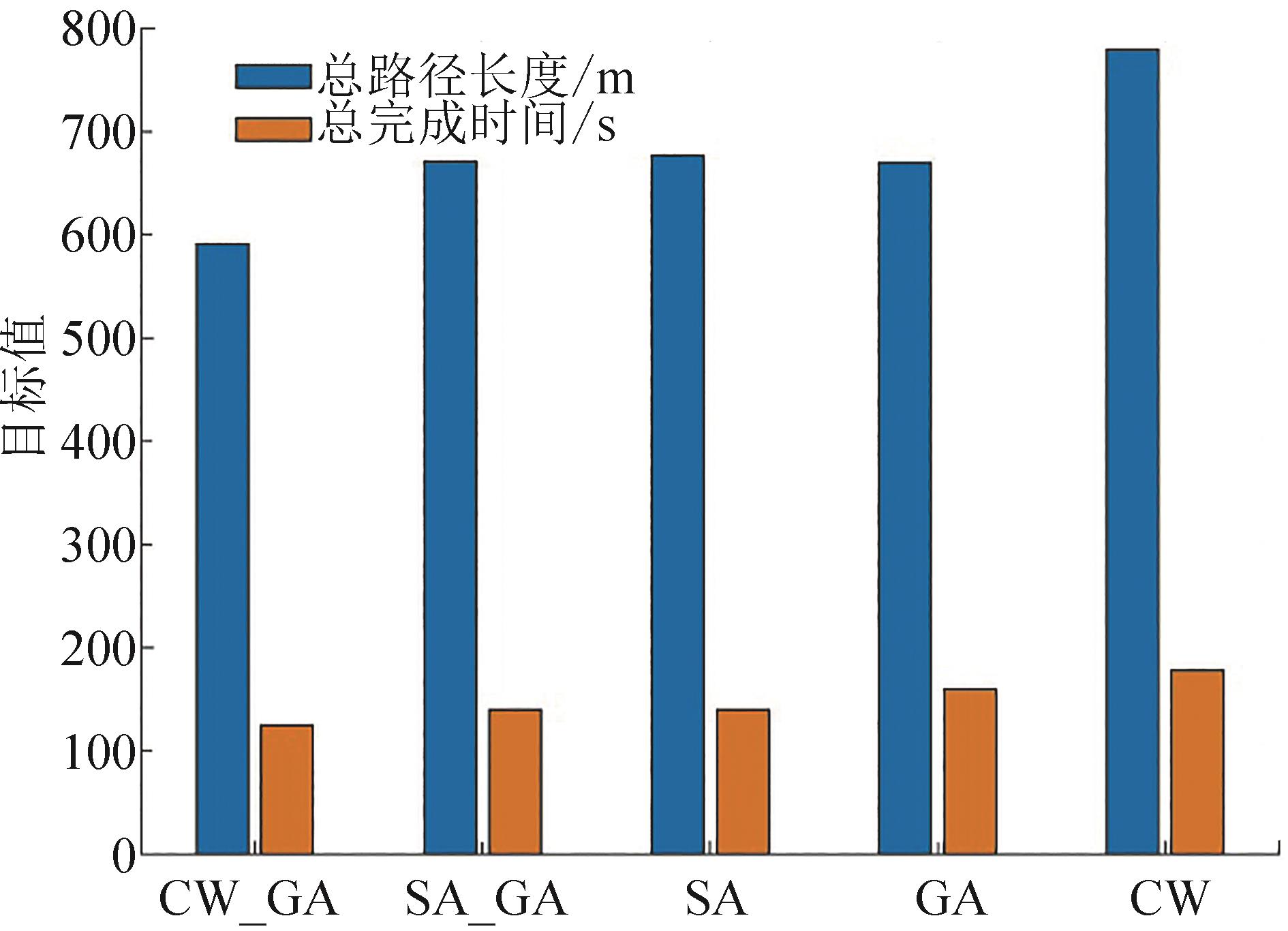
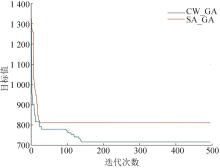
Fig. 6
Convergence curves of CW_GA and SA_GA algorithms
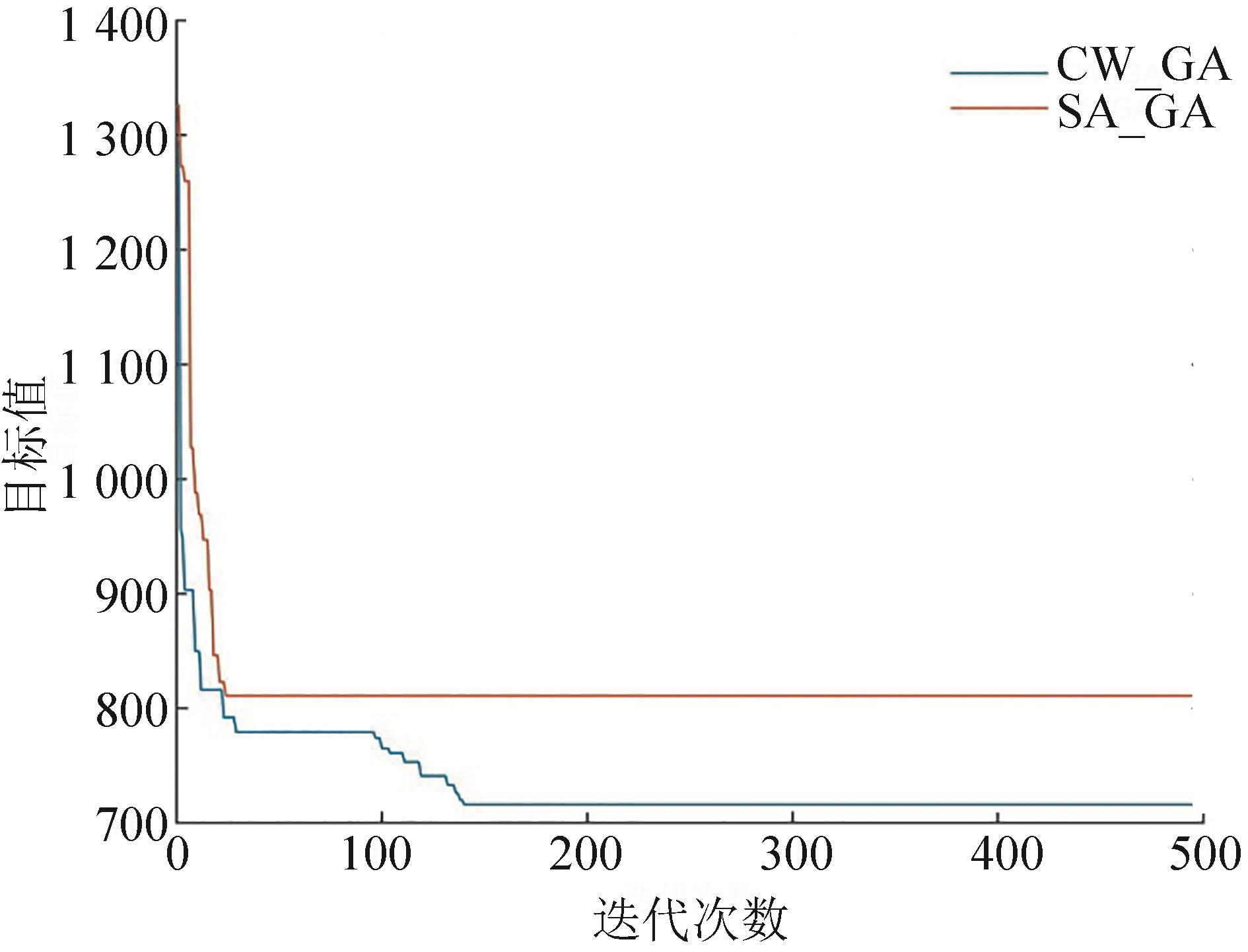
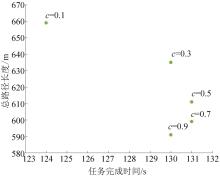
Fig. 7
Sensitivity analysis
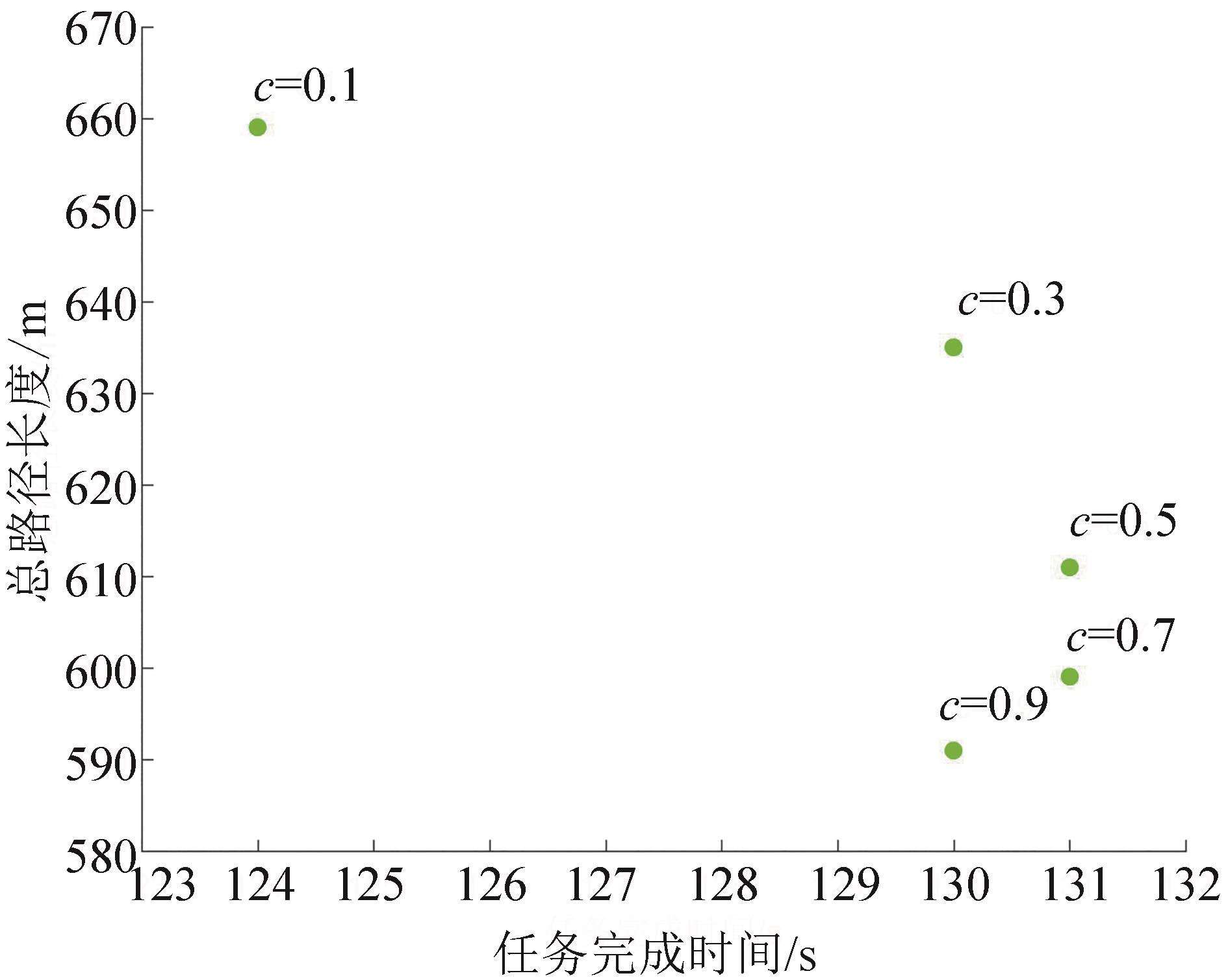
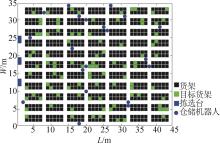
Fig. 8
Schematic diagram of large-scale container picking
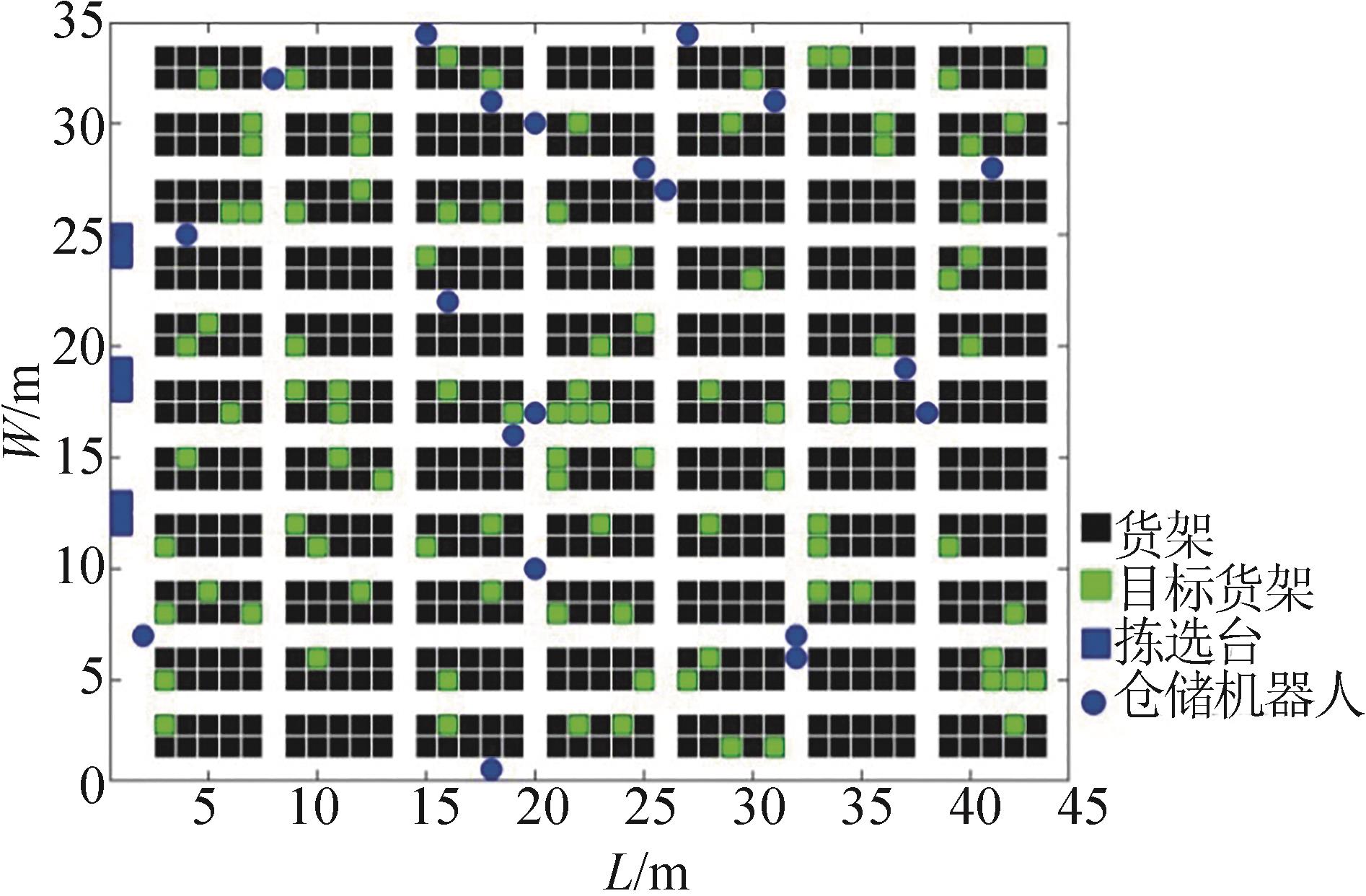
Table 4
Comparison of calculation results with different container quantities
| 货箱数量 | 最大货架 命中货箱数量 | 最大承载 货箱数量 | 目标函数1 | 目标函数2 | Gap1/% | Gap2/% | ||
|---|---|---|---|---|---|---|---|---|
| 算法1(obj1) | 算法2 (obj2) | 算法1 (obj3) | 算法2 (obj4) | |||||
| avg | 4.85 | 1.82 | ||||||
| 100 | 1 | 5 | 1 599 | 1 750 | 122 | 127 | 9.44 | 4.10 |
| 110 | 1 | 5 | 1 808 | 1 894 | 116 | 120 | 4.76 | 3.45 |
| 120 | 1 | 5 | 1 955 | 1 986 | 123 | 124 | 1.59 | 0.81 |
| 130 | 1 | 5 | 2 118 | 2 150 | 124 | 124 | 1.51 | 0 |
| 140 | 1 | 5 | 2 257 | 2 362 | 119 | 118 | 4.65 | -0.84 |
| 150 | 1 | 5 | 2 418 | 2 591 | 118 | 122 | 7.15 | 3.39 |
Table 5
Comparison of calculation results with different maximum shelf-hitting containers
| 货箱数量 | 最大货架 命中货箱数量 | 最大承载 货箱数量 | 目标函数1 | 目标函数2 | Gap1/% | Gap2/% | ||
|---|---|---|---|---|---|---|---|---|
算法1 (obj1) | 算法2 (obj2) | 算法1 (obj3) | 算法2 (obj4) | |||||
| avg | 2.12 | 2.16 | ||||||
| 100 | 2 | 5 | 1 616 | 1 637 | 117 | 127 | 1.30 | 8.55 |
| 100 | 3 | 5 | 1 685 | 1 741 | 123 | 153 | 3.32 | 24.39 |
| 100 | 4 | 5 | 1 762 | 1 706 | 124 | 124 | -3.18 | 0 |
| 120 | 2 | 5 | 1 872 | 1 951 | 125 | 120 | 4.22 | -4.00 |
| 120 | 3 | 5 | 1 853 | 1 938 | 126 | 114 | 4.59 | -9.52 |
| 120 | 4 | 5 | 2 024 | 2 082 | 119 | 119 | 2.87 | 0 |
| 150 | 2 | 5 | 2 371 | 2 403 | 116 | 116 | 1.35 | 0 |
| 150 | 3 | 5 | 2 275 | 2 358 | 119 | 119 | 3.65 | 0 |
| 150 | 4 | 5 | 2 345 | 2 368 | 119 | 119 | 0.98 | 0 |
Table 6
Comparison of calculation results with different maximum load-carrying containers
| 货箱数量 | 最大货架 命中货箱数量 | 最大承载货箱数量 | 目标函数1 | 目标函数2 | Gap1/% | Gap2/% | ||
|---|---|---|---|---|---|---|---|---|
算法1 (obj1) | 算法2 (obj2) | 算法1 (obj3) | 算法2 (obj4) | |||||
| avg | 4.78 | 6.37 | ||||||
| 100 | 1 | 6 | 1 447 | 1 584 | 122 | 136 | 9.47 | 11.48 |
| 100 | 1 | 7 | 1 363 | 1 497 | 121 | 148 | 9.83 | 22.31 |
| 100 | 1 | 8 | 1 268 | 1 364 | 132 | 138 | 7.57 | 4.55 |
| 100 | 2 | 6 | 1 424 | 1 392 | 134 | 134 | -2.25 | 0 |
| 100 | 2 | 7 | 1 330 | 1 417 | 130 | 136 | 6.54 | 4.62 |
| 100 | 2 | 8 | 1 187 | 1 302 | 123 | 134 | 9.69 | 8.94 |
| 100 | 3 | 6 | 1 440 | 1 423 | 117 | 123 | -1.18 | 5.13 |
| 100 | 3 | 7 | 1 354 | 1 368 | 122 | 128 | 1.03 | 4.92 |
| 100 | 3 | 8 | 1 177 | 1 204 | 130 | 124 | 2.29 | -4.62 |
| 1 | 夏清松, 唐秋华, 张利平. 多仓储机器人协同路径规划与作业避碰[J]. 信息与控制, 2019, 48(1): 22-28, 34. |
| Xia Qingsong, Tang Qiuhua, Zhang Liping. Cooperative Path Planning and Operation Collision Avoidance for Multiple Storage Robots[J]. Information and Control, 2019, 48(1): 22-28, 34. | |
| 2 | Jose K, Pratihar D K. Task Allocation and Collision-Free Path Planning of Centralized Multi-robots System for Industrial Plant Inspection Using Heuristic Methods[J]. Robotics and Autonomous Systems (S0921-8890), 2016, 80: 34-42. |
| 3 | 冯国强, 赵晓林, 高关根, 等. 基于A*蚁群算法的无人机航路规划[J]. 飞行力学, 2018, 36(5): 49-52, 57. |
| Feng Guoqiang, Zhao Xiaolin, Gao Guangen, et al. Path Planning of UAVs Using A* Ant Colony Algorithm[J]. Flight Dynamics, 2018, 36(5): 49-52, 57. | |
| 4 | 赵萍, 雷新宇, 陈波芝, 等. 基于TI-A*的多机器人动态规划协调方法研究[J]. 系统仿真学报, 2019, 31(5): 925-935. |
| Zhao Ping, Lei Xinyu, Chen Bozhi, et al. TI-A* Based Multi-robot Dynamic Planning and Coordination Method[J]. Journal of System Simulation, 2019, 31(5): 925-935. | |
| 5 | 王志中. 基于改进蚁群算法的移动机器人路径规划研究[J]. 机械设计与制造, 2018(1): 242-244. |
| Wang Zhizhong. Path Planning for Molile Robot Based on Improved Ant Colony Algorithm[J]. Machinery Design & Manufacture, 2018(1): 242-244. | |
| 6 | 胡春阳, 姜平, 周根荣. 改进蚁群算法在AGV路径规划中的应用[J]. 计算机工程与应用, 2020, 56(8): 270-278. |
| Hu Chunyang, Jiang Ping, Zhou Genrong. Application of Improved Ant Colony Optimization in AGV Path Planning[J]. Computer Engineering and Applications, 2020, 56(8): 270-278. | |
| 7 | 张晓莉, 杨亚新, 谢永成. 改进的蚁群算法在机器人路径规划上的应用[J]. 计算机工程与应用, 2020, 56(2): 29-34. |
| Zhang Xiaoli, Yang Yaxin, Xie Yongcheng. Application of Improved Ant Colony Algorithm in Robot Path Planning[J]. Computer Engineering and Applications, 2020, 56(2): 29-34. | |
| 8 | 曹新亮, 王智文, 冯晶, 等. 基于改进蚁群算法的机器人全局路径规划研究[J]. 计算机工程与科学, 2020, 42(3): 564-570. |
| Cao Xinliang, Wang Zhiwen, Feng Jing, et al. Global Path Planning of Robots Based on Improved Ant Colony Algorithm[J]. Computer Engineering & Science, 2020, 42(3): 564-570. | |
| 9 | 陶重犇, 雷祝兵, 李春光, 等. 基于改进模拟退火算法的搬运机器人路径规划[J]. 计算机测量与控制, 2018, 26(7): 182-185. |
| Tao Zhongben, Lei Zhubing, Li Chunguang, et al. Path Planning of Handling Robot Based on Improved Simulated Annealing Algorithm[J]. Computer Measurement & Control, 2018, 26(7): 182-185. | |
| 10 | 巩敦卫, 曾现峰, 张勇. 基于改进模拟退火算法的机器人全局路径规划[J]. 系统仿真学报, 2013, 25(3): 480-483, 488. |
| Gong Dunwei, Zeng Xianfeng, Zhang Yong. Global Path Planning Method of Robot Based on Modified Simulated Annealing Algorithm[J]. Journal of System Simulation, 2013, 25(3): 480-483, 488. | |
| 11 | Nazarahari M, Khanmirza E, Doostie S. Multi-objective Multi-Robot Path Planning in Continuous Environment Using an Enhanced Genetic Algorithm[J]. Expert Systems with Applications (S0957-4174), 2019, 115: 106-120. |
| 12 | 裴以建, 杨亮亮, 杨超杰. 基于一种混合遗传算法的移动机器人路径规划[J]. 现代电子技术, 2019, 42(2): 183-186. |
| Pei Yijian, Yang Liangliang, Yang Chaojie. Mobile Robot Path Planning Based on A Hybrid Genetic Algorithm[J]. Modern Electronics Technique, 2019, 42(2): 183-186. | |
| 13 | 任剑锋, 叶春明, 杨枫. 带时间窗的车间搬运机器人路径优化建模及算法研究[J]. 运筹与管理, 2020, 29(5): 52-60. |
| Ren Jianfeng, Ye Chunming, Yang Feng. Research on Path Optimization Modeling and Algorithm of Workshop Handling Robot with Time Window[J]. Operations Research and Management Science, 2020, 29(5): 52-60. | |
| 14 | 张丹露, 孙小勇, 傅顺, 等. 智能仓库中的多机器人协同路径规划方法[J]. 计算机集成制造系统, 2018, 24(2): 410-418. |
| Zhang Danlu, Sun Xiaoyong, Fu Shun, et al. Cooperative Path Planning in Multi-robots for Intelligent Warehouse[J]. Computer Integrated Manufacturing Systems, 2018, 24(2): 410-418. | |
| 15 | 张海军, 张博, 岳溥庥, 等. 基于混合遗传算法的多巷道间移动拣选优化[J]. 计算机工程与应用, 2014, 50(16): 243-249. |
| Zhang Haijun, Zhang Bo, Yue Puxiu, et al. Order Picking Optimization in Multiple Aisles Based on Hybrid Genetic Algorithm[J]. Computer Engineering and Applications, 2014, 50(16): 243-249. | |
| 16 | Vigo D. A Heuristic Algorithm for the Asymmetric Capacitated Vehicle Routing Problem[J]. European Journal of Operational Research (0377-2217), 1996, 89(1): 108-126. |
| 17 | 李锋, 魏莹. 求解随机旅行时间的C-VRP问题的混合遗传算法[J]. 系统管理学报, 2014, 23(6): 819-825, 831. |
| Li Feng, Wei Ying. Hybrid Genetic Algorithm for Capacitated Vehicle Routing Problem with Stochastic Travel Time[J]. Journal of Systems & Management, 2014, 23(6): 819-825, 831. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Zhang Dingkun, Liang Haizhao. Hierarchical Motion Planning of Mobile Robot Based on Dynamic Corridor Inflation and Convex Optimization [J]. Journal of System Simulation, 2026, 38(5): 1383-1407. |
| [3] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [4] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [5] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [6] | Xing Lijing, Li Min, Zeng Xiangguang, Zhang Ping, Peng Bei. AUV Path Planning Based on Behavior Cloning and Improved DQN in Partially Unknown Environments [J]. Journal of System Simulation, 2025, 37(11): 2754-2767. |
| [7] | Luo Yi, Deng Jia. Path Planning for Mobile Robots Based on Improved RRT-Connect and DWA Fusion [J]. Journal of System Simulation, 2025, 37(10): 2545-2556. |
| [8] | Wang Ning, Mao Jianlin, Li Dayan, Fang Chengyuan, Qian Chengze. Low-energy Multi-robot Path Planning Algorithm under HCA* Framework [J]. Journal of System Simulation, 2025, 37(10): 2630-2642. |
| [9] | Liu Xiaode, Guo Yufei, Chen Yuanpei, Zhou Jie, Zhang Yuhan, Peng Weihang, Ma Zhe. Simulation and Optimization of Continuous Motion Control Based on Spiking Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(10): 2662-2671. |
| [10] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [11] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhang Shuzhen, Cheng Yukun, Liu Yangbo, Zha Fusheng. An Extended Image Features Based Uncalibrated Visual Servoing Method [J]. Journal of System Simulation, 2025, 37(5): 1210-1221. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
