

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (3): 803-821.doi: 10.16182/j.issn1004731x.joss.23-1392
• Papers • Previous Articles
Jin Xu1, Mo Yuanbin1,2
Received:2023-11-16
Revised:2024-01-26
Online:2025-03-17
Published:2025-03-21
Contact:
Mo Yuanbin
CLC Number:
Jin Xu, Mo Yuanbin. Multi-strategy Hybrid Mountain Gazelle Optimizer for Robot Path Planning[J]. Journal of System Simulation, 2025, 37(3): 803-821.

Fig. 1
Mountain gazelle optimizer flowchart
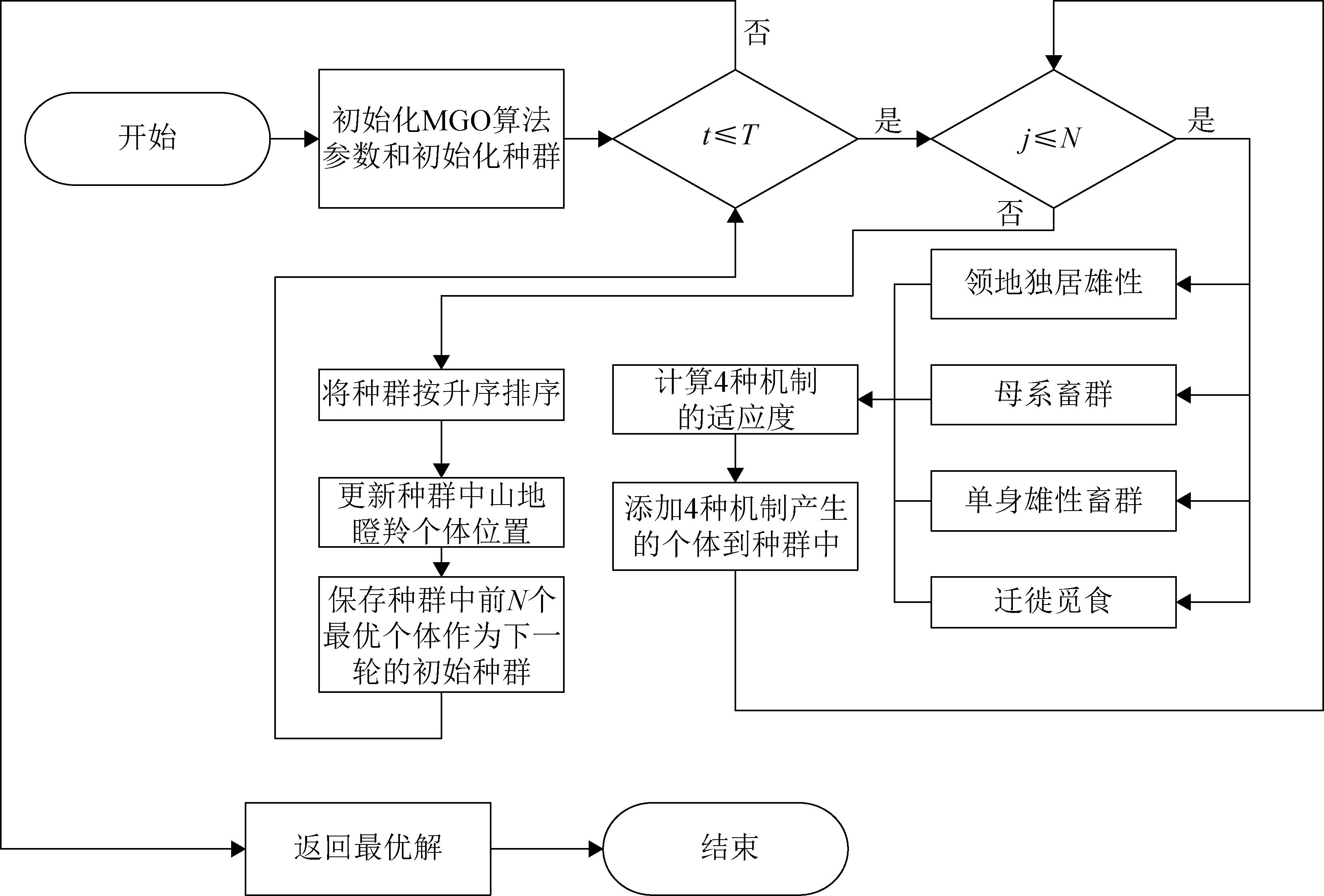
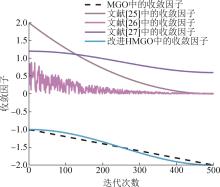
Fig. 2
Convergence factor curve diagram
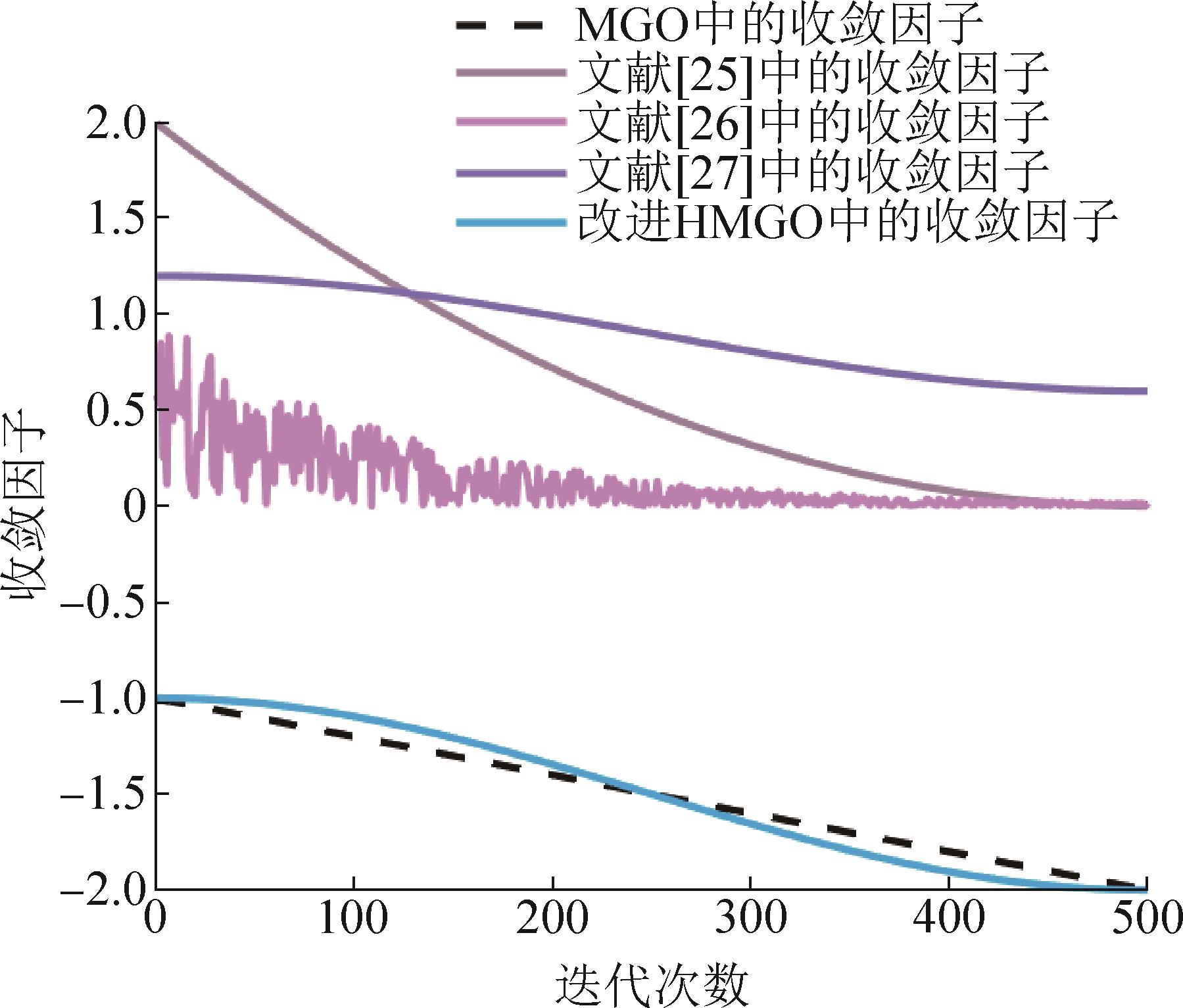
Fig. 3
The comparative plot of the new population
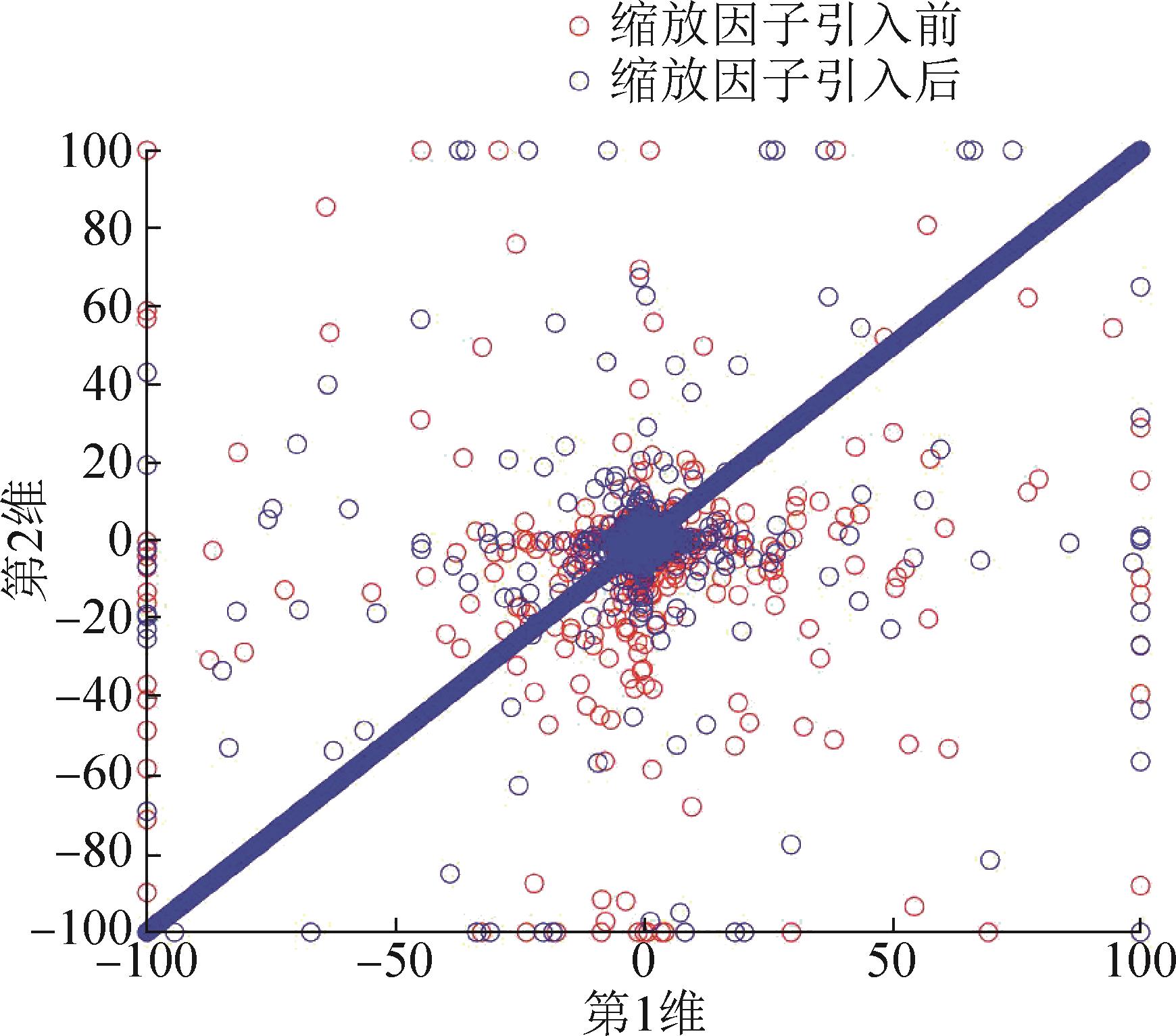
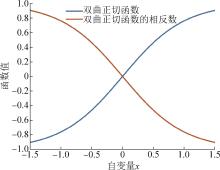
Fig. 4
Hyperbolic tangent function and its opposite function
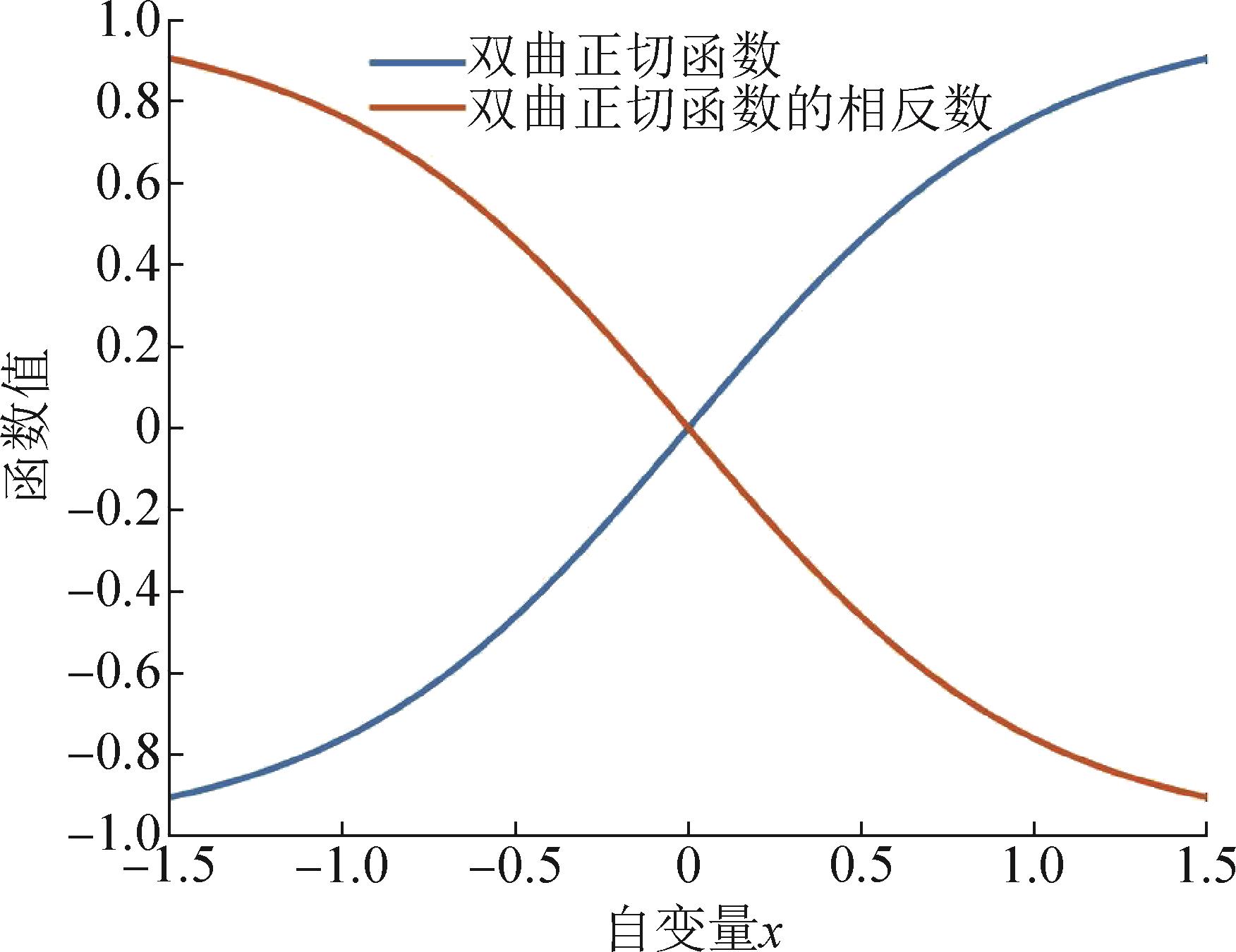

Fig. 5
Scaling factor function and its transition function
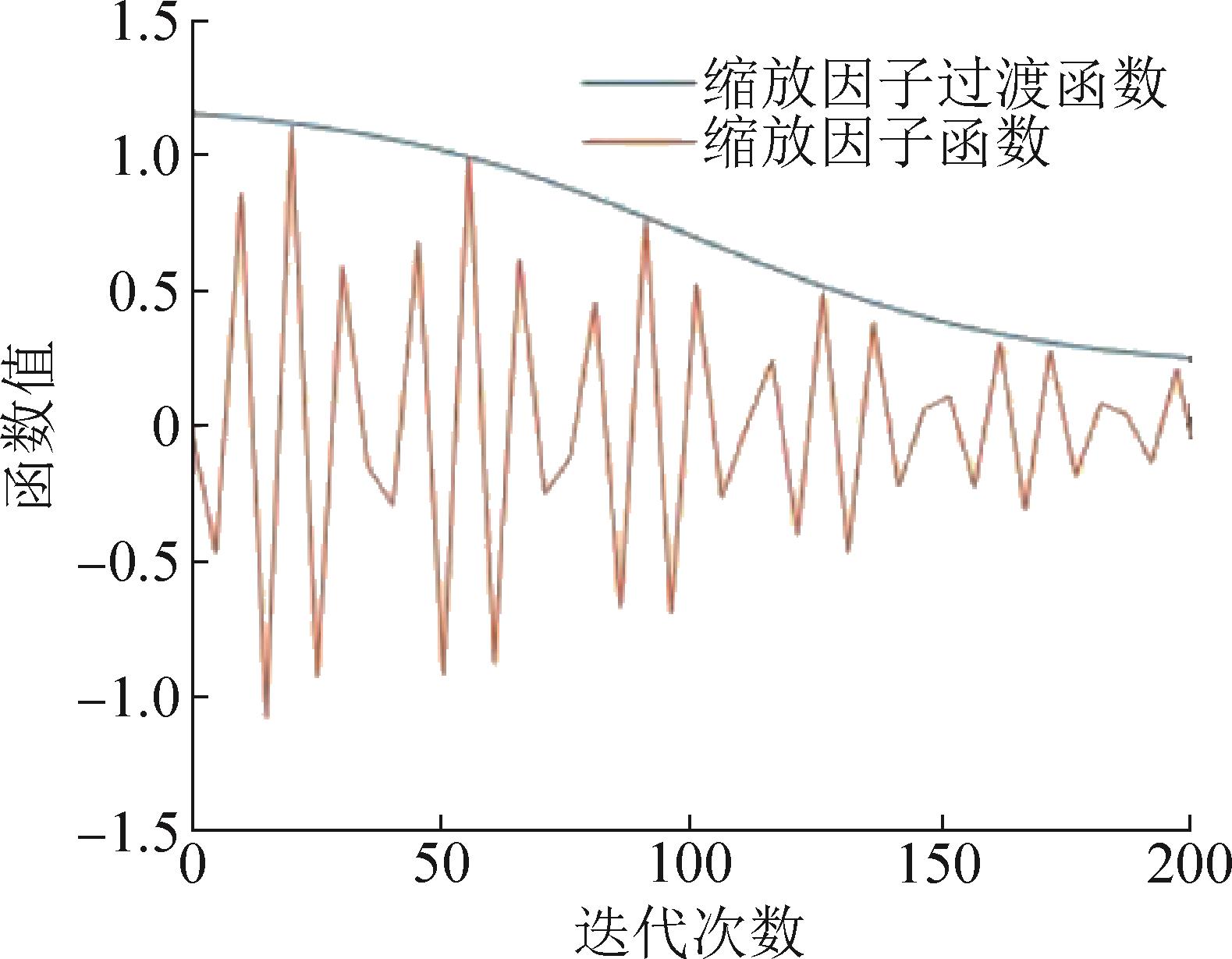
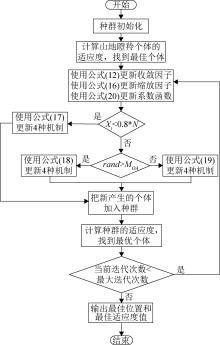
Fig. 6
Flowchart of HMGO
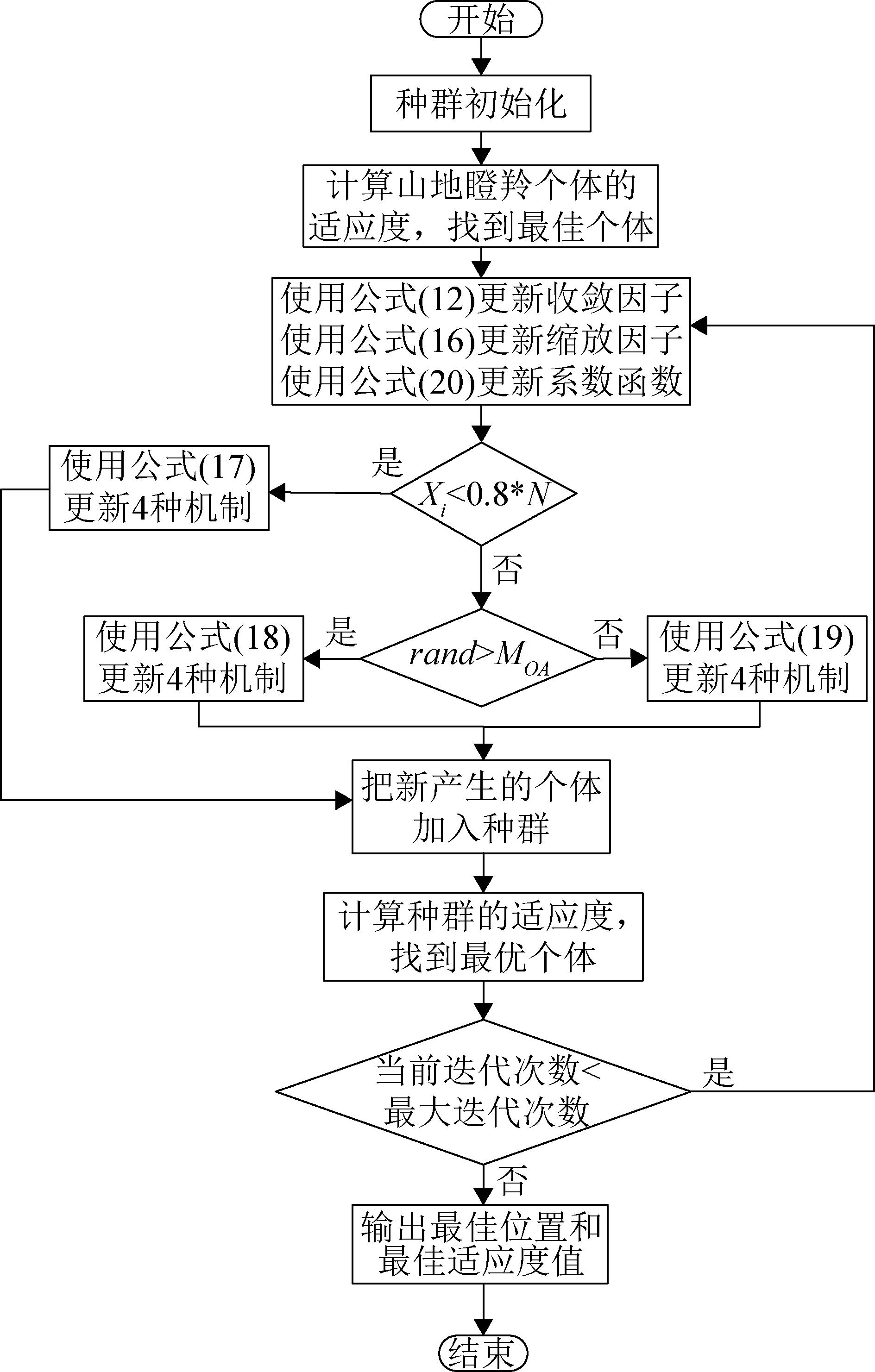
Table 1
Description comparison algorithm
| 算法 | 功能描述 |
|---|---|
| MGO | 标准山地瞪羚优化器 |
| MGO1 | HMGO去掉2.1节初始化种群策略 |
| MGO2 | HMGO去掉2.2节动态自适应密度因子 |
| MGO3 | HMGO去掉2.3节缩放因子策略改善相对位移 |
| MGO4 | HMGO去掉2.4节混合改进的算术优化算法 |
| HMGO | 混合多种策略改进的山地瞪羚优化器 |
Table 2
Ablation experiment results
| 函数 | 指标 | MGO | MGO1 | MGO2 | MGO3 | MGO4 | HMGO |
|---|---|---|---|---|---|---|---|
| F1 | 均值 | 3.177 | 5.910 | 0 | 0 | 1.196 | 0 |
| 标准差 | 1.251 | 0 | 0 | 0 | 4.292 | 0 | |
| F2 | 均值 | 1.316 | 0 | 0 | 0 | 1.869 | 0 |
| 标准差 | 3.531 | 0 | 0 | 0 | 7.750 | 0 | |
| F3 | 均值 | 3.934 | 0 | 0 | 0 | 5.941 | 0 |
| 标准差 | 4.421 | 0 | 0 | 0 | 6.552 | 0 | |
| F4 | 均值 | 3.332×10-21 | 0 | 0 | 0 | 1.116×10-36 | 0 |
| 标准差 | 1.111×10-20 | 0 | 0 | 0 | 1.420×10-71 | 0 | |
| F5 | 均值 | 5.575×10-18 | 6.867×10-4 | 5.437×10-4 | 2.193×10-22 | 1.768×10-4 | 3.491×10-4 |
| 标准差 | 9.325×10-34 | 2.278E×10-6 | 7.587E×10-7 | 1.396×10-42 | 6.319×10-8 | 2.827×10-7 | |
| F6 | 均值 | 1.811×10-8 | 3.457×10-9 | 3.874×10-9 | 4.327×10-9 | 8.421×10-9 | 1.665×10-9 |
| 标准差 | 3.690×10-15 | 3.698×10-17 | 2.604×10-16 | 1.667×10-18 | 1.263×10-16 | 9.701×10-18 | |
| F7 | 均值 | 4.539×10-4 | 4.685×10-5 | 4.872×10-5 | 7.807×10-5 | 2.100×10-4 | 4.195×10-5 |
| 标准差 | 1.309×10-7 | 1.139×10-9 | 1.305×10-9 | 3.875×10-9 | 7.905×10-8 | 1.242×10-9 | |
| F8 | 均值 | -1.257×104 | -1.259×104 | -1.259×104 | -1.259×104 | -1.259×104 | -1.260×104 |
| 标准差 | 3.999×10-8 | 2.324×10-7 | 1.709×10-8 | 3.377×10-10 | 1.026×10-9 | 3.382×10-8 | |
| F9 | 均值 | 0 | 0 | 0 | 0 | 0 | 0 |
| 标准差 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F10 | 均值 | 1.717×10-15 | 8.882×10-16 | 8.882×10-16 | 8.883×10-16 | 1.480×10-15 | 8.882×10-16 |
| 标准差 | 2.336×10-30 | 0 | 0 | 0 | 1.814×10-30 | 0 | |
| F11 | 均值 | 0 | 0 | 0 | 0 | 0 | 0 |
| 标准差 | 0 | 0 | 0 | 0 | 0 | 0 | |
| F12 | 均值 | 3.124×10-23 | 2.185×10-8 | 6.220×10-8 | 1.845×10-23 | 7.306×10-9 | 3.060×10-11 |
| 标准差 | 4.954×10-50 | 1.314×10-15 | 8.081×10-15 | 6.545×10-44 | 1.404×10-16 | 2.221×10-17 | |
| F13 | 均值 | 1.958×10-32 | 1.318×10-6 | 7.664×10-7 | 2.435×10-32 | 7.134×10-8 | 3.164×10-7 |
| 标准差 | 3.127×10-64 | 2.828×10-11 | 1.653×10-12 | 1.359×10-65 | 1.761×10-14 | 1.834×10-13 |
Table 3
13 benchmark Functions
| 序号 | 标准测试函数 | 搜索空间 | 最优值 |
|---|---|---|---|
| F1 | Sphere Function | [-100,100] | 0 |
| F2 | Schwefel's Problem 1.2 | [-10,10] | 0 |
| F3 | Quadnc | [-100,100] | 0 |
| F4 | Schwefel's Problem 1.22 | [-100,100] | 0 |
| F5 | Generalized Rosenbrock's Function | [-30,30] | 0 |
| F6 | Step Function | [-100,100] | 0 |
| F7 | Quartic Function i.e. Noise | [-1.28,1.28] | 0 |
| F8 | Generalized Schwefel's Problem 2.26 | [-500,500] | 0 |
| F9 | Generalized Rastrigin's Function | [-5.12,5.12] | 0 |
| F10 | Ackley's Function | [-32,32] | 0 |
| F11 | Generalized Griewank's Function | [-600,600] | 0 |
| F12 | Generalized Penalized Function1 | [-50,50] | 0 |
| F13 | Generalized Penalized Function2 | [-50,50] | 0 |
Table 4
Parameters setting of the algorithm
| 算法 | 参数设置 |
|---|---|
| PSO | F=0.3;vmax=6; |
| GSA | α=20;G0=100;R=1 |
| AOA | Min =0.2;Max =1;μ=0.499;α=5 |
| AMGO | 混沌漂移-Alpa=0.7 |
| NGO | I = [ |
| CSA | Pp=0.1; |
| GWO | a =[2,0] |
Table 5
Comparison with other swarm intelligence algorithms
| 函数 | 评价指标 | 最优值 | 最差值 | 平均值 | 标准差 | 时间/s |
|---|---|---|---|---|---|---|
| F1 | PSO | 4.996×10-2 | 6.326×10-1 | 2.551×10-1 | 1.430×10-1 | 1.615×10-1 |
| GSA | 5.033×10-17 | 4.441×10-16 | 1.248×10-16 | 8.188×10-17 | 1.877 | |
| AOA | 3.977×10-290 | 3.578×10-62 | 1.431×10-45 | 6.533×10-63 | 2.141×10-1 | |
| NGO | 5.369×10-183 | 9.526×10-179 | 2.657×10-179 | 0 | 3.149×10-1 | |
| CSA | 2.404×10-3 | 3.823×10-1 | 8.330×10-2 | 9.017×10-2 | 1.497×10-1 | |
| GWO | 3.443×10-62 | 5.754×10-58 | 5.327×10-59 | 1.042×10-58 | 2.761×10-1 | |
| MGO | 2.378×10-146 | 5.754×10-58 | 5.189×10-59 | 1.041×10-58 | 2.709 | |
| AMGO | 1.626×10-159 | 4.130×10-140 | 1.377×10-141 | 7.540×10-141 | 2.194 | |
| HMGO | 0 | 0 | 0 | 0 | 4.601 | |
| F2 | PSO | 5.238×10-1 | 1.825 | 9.845×10-1 | 3.407×10-1 | 1.851×10-1 |
| GSA | 3.465×10-8 | 9.244×10-8 | 5.365×10-8 | 1.388×10-8 | 1.851×10-1 | |
| AOA | 0 | 0 | 0 | 0 | 2.333×10-1 | |
| NGO | 4.560×10-94 | 5.004×10-92 | 1.223×10-92 | 1.278×10-92 | 3.729×10-1 | |
| CSA | 1.680 | 1.393×10 | 5.495 | 2.860 | 1.763×10-1 | |
| GWO | 1.003×10-35 | 3.888×10-34 | 7.661×10-35 | 8.168×10-35 | 3.041×10-1 | |
| MGO | 5.325×10-90 | 3.888×10-34 | 7.589×10-35 | 8.227×10-35 | 3.179 | |
| AMGO | 7.171×10-90 | 8.478×10-82 | 3.110×10-83 | 1.545×10-82 | 2.485 | |
| HMGO | 0 | 0 | 0 | 0 | 4.522 | |
| F3 | PSO | 3.220×10 | 1.343×102 | 7.765×10 | 2.646×10 | 1.077 |
| GSA | 1.882×102 | 7.716×102 | 4.417×102 | 1.566×102 | 1.077 | |
| AOA | 6.219×10-221 | 1.731×10-2 | 1.749×10-3 | 4.709×10-3 | 9.931×10-1 | |
| NGO | 1.400×10-58 | 7.704×10-47 | 3.104×10-48 | 1.424×10-47 | 1.954 | |
| CSA | 5.990×102 | 3.284×103 | 1.495×103 | 6.646×102 | 9.916×10-1 | |
| GWO | 1.400×10-20 | 2.875×10-14 | 3.692×10-15 | 7.895×10-15 | 1.196 | |
| MGO | 1.024×10-21 | 2.875×10-14 | 3.100×10-15 | 7.456×10-15 | 7.154 | |
| AMGO | 9.948×10-28 | 5.139×10-17 | 3.118×10-18 | 1.035×10-17 | 3.508 | |
| HMGO | 0 | 0 | 0 | 0 | 5.780 | |
| F4 | PSO | 1.021 | 1.845 | 1.535 | 2.076×10-1 | 1.606×10-1 |
| GSA | 9.517×10-9 | 3.121 | 1.096 | 1.052 | 1.606×10-1 | |
| AOA | 1.361×10-106 | 6.836×10-2 | 2.011×10-2 | 2.078×10-2 | 2.095×10-1 | |
| NGO | 5.175×10-78 | 7.663×10-76 | 1.557×10-76 | 1.859×10-76 | 3.265×10-1 | |
| CSA | 7.844 | 1.853×10 | 1.315×10 | 2.887 | 1.569×10-1 | |
| GWO | 5.176×10-16 | 2.136×10-13 | 2.503×10-14 | 4.091×10-14 | 2.899×10-1 | |
| MGO | 5.711×10-55 | 2.136×10-13 | 2.448×10-14 | 4.114×10-14 | 2.798 | |
| AMGO | 1.937×10-57 | 1.896×10-46 | 1.335×10-47 | 4.097×10-47 | 2.114 | |
| HMGO | 0 | 0 | 0 | 0 | 4.667 | |
| F5 | PSO | 9.487×10 | 5.793×102 | 2.456×102 | 1.196×102 | 2.000×10-1 |
| GSA | 2.576×10 | 8.237×10 | 2.821×10 | 1.023×10 | 2.000×10-1 | |
| AOA | 2.692×10 | 2.878×10 | 2.810×10 | 4.325×10-1 | 2.445×10-1 | |
| NGO | 2.194×10 | 2.452×10 | 2.359×10 | 5.229×10-1 | 4.403×10-1 | |
| CSA | 2.940×10 | 1.388×103 | 2.483×102 | 3.014×102 | 1.918×10-1 | |
| GWO | 2.522×10 | 2.875×10 | 2.685×10 | 8.174×10-1 | 3.181×10-1 | |
| MGO | 1.294×10-30 | 2.875×10 | 2.592×10 | 4.959 | 3.116 | |
| AMGO | 0 | 2.360×10-29 | 1.800×10-30 | 4.887×10-30 | 2.169 | |
| HMGO | 6.727×10-10 | 8.679×10-4 | 1.602×10-4 | 1.988×10-4 | 4.871 | |
| F6 | PSO | 7.924×10-2 | 7.766×10-1 | 3.559×10-1 | 1.985×10-1 | 1.585×10-1 |
| GSA | 5.274×10-10 | 3.484×10-5 | 3.227×10-6 | 6.860×10-7 | 1.585×10-1 | |
| AOA | 2.238 | 3.326 | 2.785 | 2.591×10-1 | 2.112×10-1 | |
| NGO | 9.245×10-9 | 2.078×10-5 | 7.110×10-5 | 5.558×10-6 | 3.317×10-1 | |
| CSA | 4.252×10-3 | 2.291×10-1 | 6.376×10-2 | 6.886×10-2 | 1.662×10-1 | |
| GWO | 3.361×10-5 | 1.246 | 5.895×10-1 | 3.096×10-1 | 3.219×10-1 | |
| MGO | 5.571×10-17 | 1.246 | 5.561×10-1 | 3.175×10-1 | 2.890 | |
| AMGO | 5.542×10-8 | 2.282×10-5 | 2.199×10-6 | 4.143×10-6 | 2.008 | |
| HMGO | 8.000×10-22 | 2.728×10-12 | 1.023×10-13 | 4.982×10-13 | 5.281 | |
| F7 | PSO | 4.985×10-1 | 8.132 | 2.711 | 1.937 | 3.109×10-1 |
| GSA | 2.709×10-2 | 1.268×10-1 | 5.499×10-2 | 2.283×10-2 | 3.109×10-1 | |
| AOA | 8.382×10-7 | 1.127×10-4 | 2.896×10-5 | 3.040×10-5 | 3.735×10-1 | |
| NGO | 3.233×10-5 | 5.632×10-4 | 2.741×10-4 | 1.323×10-4 | 6.027×10-1 | |
| CSA | 1.202×10-1 | 9.775×10-1 | 5.537×10-1 | 2.573×10-1 | 2.899×10-1 | |
| GWO | 2.849×10-4 | 3.500×10-3 | 1.028×10-3 | 7.190×10-4 | 4.190×10-1 | |
| MGO | 3.164×10-5 | 3.500×10-3 | 1.019×10-3 | 7.294×10-4 | 3.307 | |
| AMGO | 4.101×10-5 | 6.953×10-4 | 2.226×10-4 | 1.670×10-4 | 2.856 | |
| HMGO | 1.826×10-7 | 7.703×10-5 | 1.921×10-5 | 1.766×10-5 | 6.559 | |
| F8 | PSO | -8.503×103 | -3.902×103 | -6.788×103 | 1.232×103 | 2.234×10-1 |
| GSA | -3.702×103 | -2.020×103 | -2.569×103 | 4.028×102 | 2.234×10-1 | |
| AOA | -6.378×103 | -4.978×103 | -5.709×103 | 4.098×102 | 2.517×10-1 | |
| NGO | -9.385×103 | -6.968×103 | -8.145×103 | 6.393×102 | 4.287×10-1 | |
| CSA | -1.235×104 | -5.776×103 | -8.043×103 | 2.835×103 | 1.983×10-1 | |
| GWO | -7.840×103 | -3.610×103 | -6.090×103 | 8.241×102 | 3.277×10-1 | |
| MGO | -1.257×104 | -3.610×103 | -6.296×103 | 1.442×103 | 2.920 | |
| AMGO | -3.764×106 | -1.933×104 | -9.315×105 | 1.101×106 | 2.239 | |
| HMGO | -1.257×104 | -1.257×104 | -1.257×104 | 7.027×10-4 | 4.947 | |
| F9 | PSO | 5.444×10 | 2.122×102 | 1.070×102 | 3.777×10 | 1.850×10-1 |
| GSA | 1.194×10 | 4.378×10 | 2.623×10 | 6.550 | 1.850×10-1 | |
| AOA | 0 | 0 | 0 | 0 | 2.009×10-1 | |
| NGO | 0 | 0 | 0 | 0 | 3.246×10-1 | |
| CSA | 1.592×10 | 5.572×10 | 3.303×10 | 1.057×10 | 1.647×10-1 | |
| GWO | 0 | 5.836 | 4.140×10-1 | 1.359 | 2.798×10-1 | |
| MGO | 0 | 5.836 | 4.140×10-1 | 1.359 | 2.724 | |
| AMGO | 0 | 0 | 0 | 0 | 2.292 | |
| HMGO | 0 | 0 | 0 | 0 | 4.791 | |
| F10 | PSO | 2.775×10-1 | 2.950 | 1.033 | 5.554×10-1 | 2.104×10-1 |
| GSA | 4.747×10-9 | 1.202×10-8 | 8.146×10-9 | 1.972×10-9 | 2.104×10-1 | |
| AOA | 8.882×10-16 | 8.882×10-16 | 8.882×10-16 | 0 | 2.377×10-1 | |
| NGO | 4.441×10-15 | 7.994×10-15 | 5.744×10-15 | 1.741×10-15 | 3.938×10-1 | |
| CSA | 1.997×10 | 1.997×10 | 1.997×10 | 2.308×10-13 | 2.069×10-1 | |
| GWO | 1.155×10-14 | 2.931×10-14 | 1.605×10-14 | 3.605×10-15 | 3.090×10-1 | |
| MGO | 8.882×10-16 | 2.931×10-14 | 1.557×10-14 | 4.545×10-15 | 2.912 | |
| AMGO | 8.882×10-16 | 4.441×10-15 | 1.007×10-15 | 6.486×10-16 | 2.415 | |
| HMGO | 8.882×10-16 | 8.882×10-16 | 8.882×10-16 | 0 | 4.822 | |
| F11 | PSO | 2.213×10-3 | 6.051×10-2 | 2.433×10-2 | 1.742×10-2 | 2.331×10-1 |
| GSA | 2.616 | 2.065×10 | 9.090 | 4.308 | 2.331×10-1 | |
| AOA | 1.315×10-4 | 3.848×10-1 | 9.922×10-2 | 8.343×10-2 | 2.581×10-1 | |
| NGO | 0 | 0 | 0 | 0 | 4.307×10-1 | |
| CSA | 1.302×10-1 | 1.100 | 6.446×10-1 | 2.690×10-1 | 2.150×10-1 | |
| GWO | 0 | 1.896×10-2 | 2.185×10-3 | 5.774×10-3 | 3.287×10-1 | |
| MGO | 0 | 1.896×10-2 | 2.185×10-3 | 5.774×10-3 | 2.985 | |
| AMGO | 0 | 0 | 0 | 0 | 2.492 | |
| HMGO | 0 | 0 | 0 | 0 | 4.459 | |
| F12 | PSO | 3.879×10-4 | 1.053×10-1 | 5.434×10-3 | 1.891×10-2 | 6.203×10-1 |
| GSA | 2.993×10-19 | 2.220 | 2.581×10-1 | 4.896×10-1 | 6.203×10-1 | |
| AOA | 3.252×10-1 | 5.285×10-1 | 3.893×10-1 | 4.583×10-2 | 6.240×10-1 | |
| NGO | 7.953×10-10 | 1.863×10-8 | 4.013×10-9 | 4.298×10-9 | 1.173 | |
| CSA | 2.603 | 8.923 | 5.923 | 1.586 | 5.721×10-1 | |
| GWO | 1.316×10-2 | 1.236×10-1 | 4.258×10-2 | 2.726×10-2 | 7.194×10-1 | |
| MGO | 1.571×10-32 | 1.236×10-1 | 4.125×10-2 | 2.835×10-2 | 4.692 | |
| AMGO | 5.460×10-31 | 2.744×10-9 | 1.522×10-9 | 3.217×10-9 | 4.547 | |
| HMGO | 1.571×10-32 | 1.571×10-32 | 1.571×10-32 | 5.567×10-48 | 6.841 | |
| F13 | PSO | 1.057×10-2 | 2.911×10-1 | 8.818×10-2 | 5.618×10-2 | 5.827×10-1 |
| GSA | 5.470×10-18 | 2.592 | 1.652×10-1 | 5.180×10-1 | 5.827×10-1 | |
| AOA | 2.379 | 2.945 | 2.803 | 1.382×10-1 | 6.031×10-1 | |
| NGO | 1.269×10-7 | 4.733×10-1 | 1.174×10-1 | 1.219×10-1 | 1.108 | |
| CSA | 2.578 | 7.534×10 | 4.304×10 | 1.950×10 | 5.422×10-1 | |
| GWO | 9.656×10-2 | 1.021 | 5.431×10-1 | 2.475×10-1 | 6.588×10-1 | |
| MGO | 1.350×10-32 | 1.021 | 5.363×10-1 | 2.597×10-1 | 4.197 | |
| AMGO | 1.159×10-8 | 1.148×10-5 | 1.809×10-6 | 2.874×10-6 | 4.378 | |
| HMGO | 1.350×10-32 | 1.350×10-32 | 1.350×10-32 | 5.567×10-48 | 6.881 |

Fig. 7
Comparison of high-dimensional optimization curves of 9 algorithms
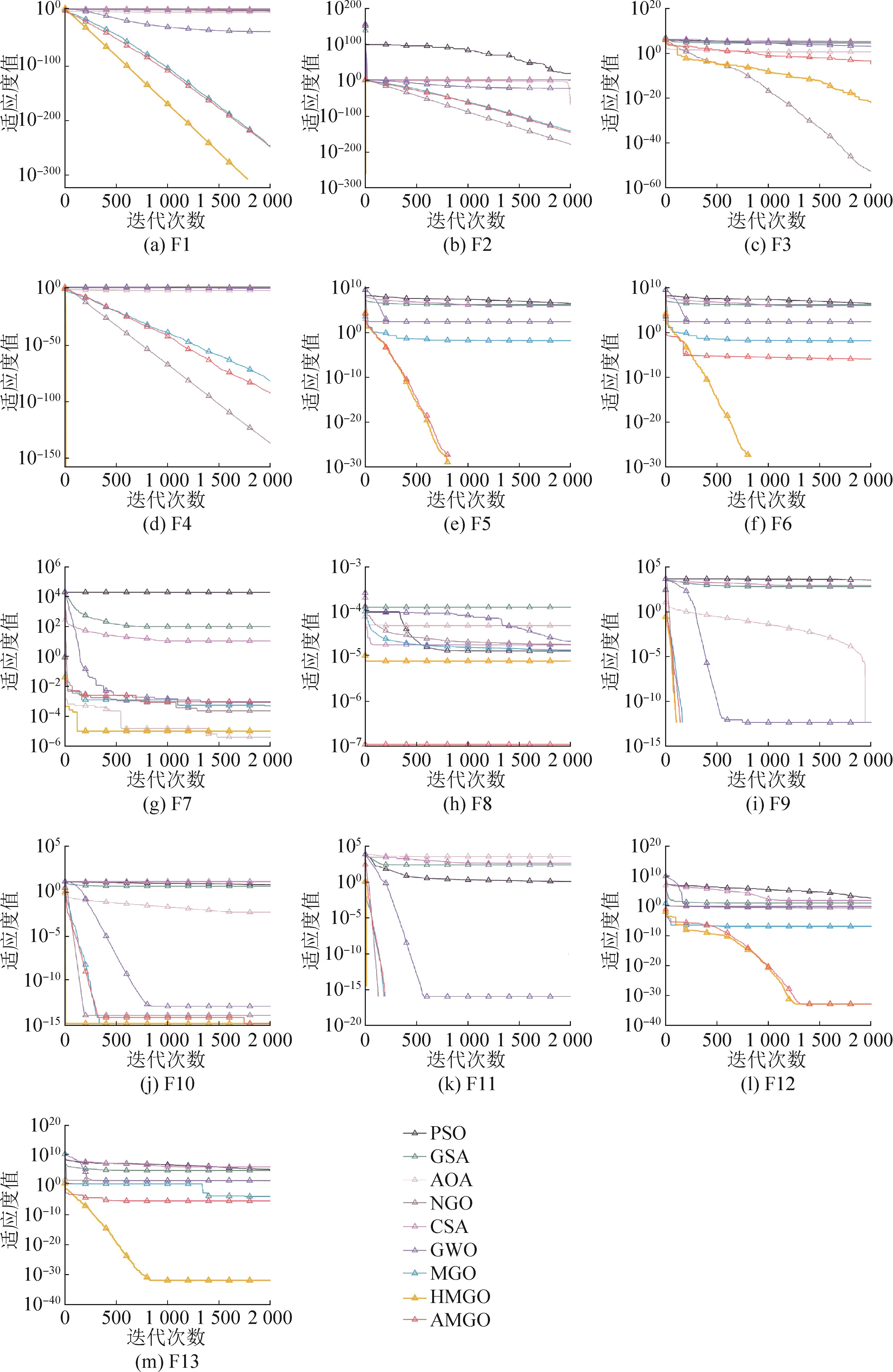
Table 6
Wilcoxon rank sum test results
| 函数 | PSO | GSA | AOA | NGO | CSA | GWO | AMGO | MGO |
|---|---|---|---|---|---|---|---|---|
| F1 | -38.7 (<) | -38.7 (<) | -37.4 (<) | -38.4 (<) | -38.8 (<) | -38.7 (<) | -34.8 (<) | -35.4 (<) |
| F2 | -13.5 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.6 (<) | -38.7 (<) | -38.7 (<) |
| F3 | -38.7 (<) | -38.7 (<) | -30.2 (<) | -6.83 (>) | -38.8 (<) | -38.7 (<) | -37.4 (<) | -0.583 (<) |
| F4 | -38.7 (<) | -38.7 (<) | -40.4 (<) | -38.7 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -38.4 (<) |
| F5 | -38.7 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -14.6 (<) | -37.9 (<) |
| F6 | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -22.2 (<) | -34.5 (<) |
| F7 | -39.3 (<) | -39.2 (<) | -14.6 (<) | -39.0 (<) | -38.8 (<) | -38.8 (<) | -40.1 (<) | -39.6 (<) |
| F8 | -38.7 (<) | -39.9 (<) | -39.9 (<) | -38.7 (<) | -38.8 (<) | -38.7 (<) | -39.9 (>) | -38.7 (<) |
| F9 | -38.8 (<) | -38.7 (<) | -38.3 (<) | -8.85 (<) | -38.8 (<) | -40.0 (<) | -10.4 (<) | -11.1 (<) |
| F10 | -38.7 (<) | -38.7 (<) | -38.6 (<) | -42.9 (<) | -38.9 (<) | -39.7 (<) | -39.3 (<) | -15.8 (<) |
| F11 | -38.7 (<) | -38.7 (<) | -41.2 (<) | -9.74 (<) | -38.8 (<) | -40.7 (<) | -12.0 (<) | -9.49 (<) |
| F12 | -38.7 (<) | -38.7 (<) | -40.2 (<) | -38.7 (<) | -38.7 (<) | -38.7 (<) | -21.7 (<) | -33.0 (<) |
| F13 | -38.7 (<) | -38.7 (<) | -39.2 (<) | -38.7 (<) | -38.7 (<) | -38.8 (<) | -24.7 (=) | -38.8 (<) |
Fig. 8
20 m×20 m map

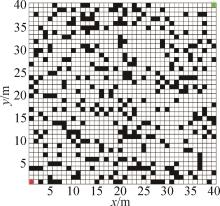
Fig. 9
40 m×40 m map
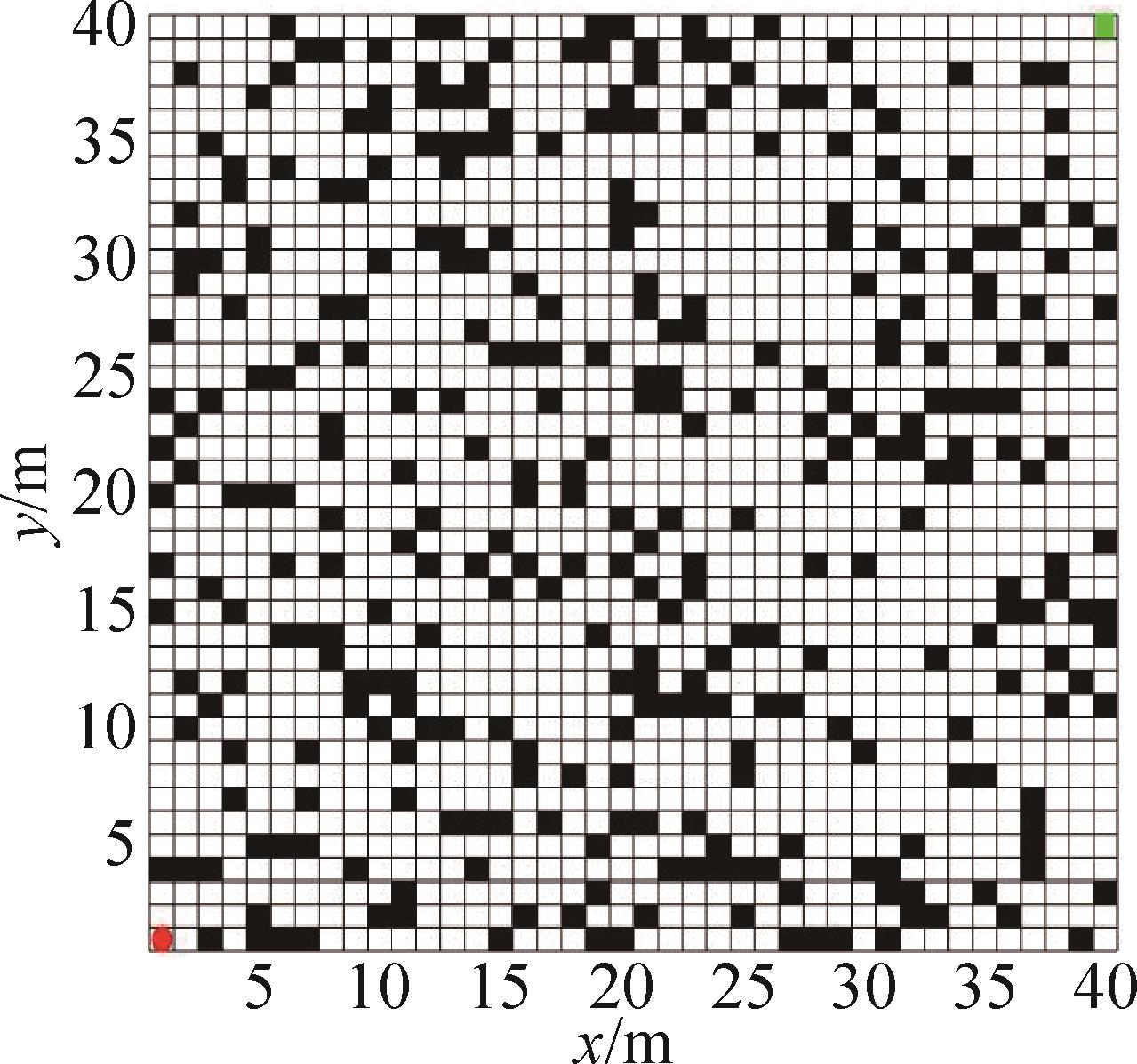
Table 7
Statistical results of path planning for a 20 m×20 m map
| 算法 | 最小值 | 最大值 | 平均值 | 标准差 |
|---|---|---|---|---|
| PSO | 28.0 | 36.3 | 29.5 | 0.528 |
| AOA | 30.4 | 32.4 | 30.8 | 0.626 |
| SSA | 28.0 | 35.2 | 28.2 | 0.902 |
| GWO | 28.6 | 35.8 | 29.9 | 2.150 |
| IAFO | 28.0 | 48.0 | 28.1 | 0.895 |
| AMGO | 26.9 | 30.3 | 28.8 | 0.800 |
| MGO | 27.5 | 35.2 | 28.0 | 0.730 |
| HMGO | 26.9 | 26.9 | 26.9 | 0 |
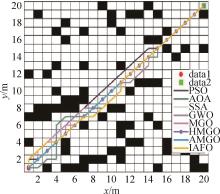
Fig. 10
Path planning in an environment of 20 m×20 m
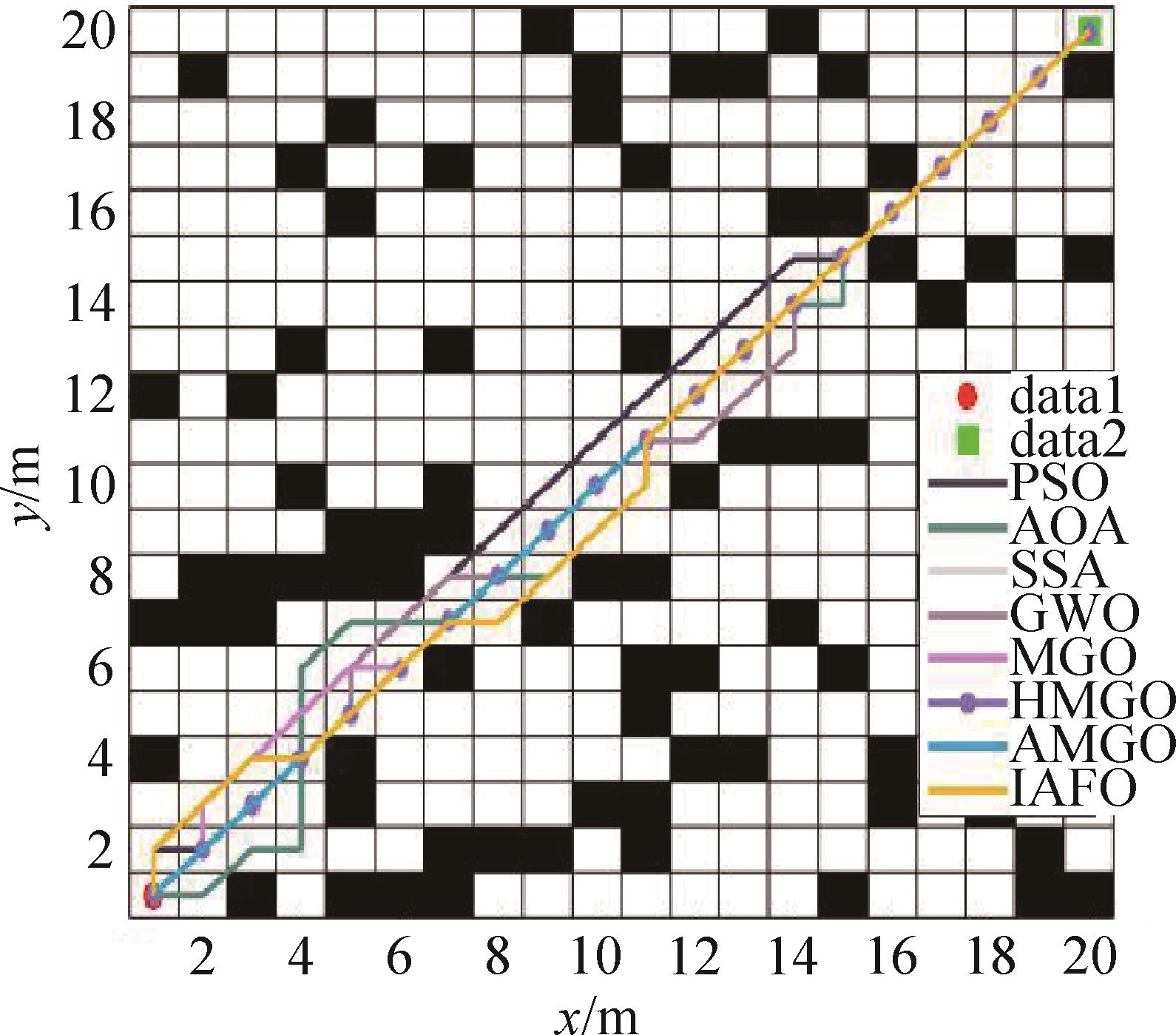
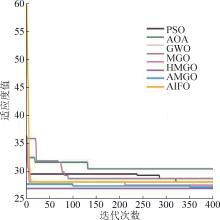
Fig. 11
20 m×20 m Iterative curves
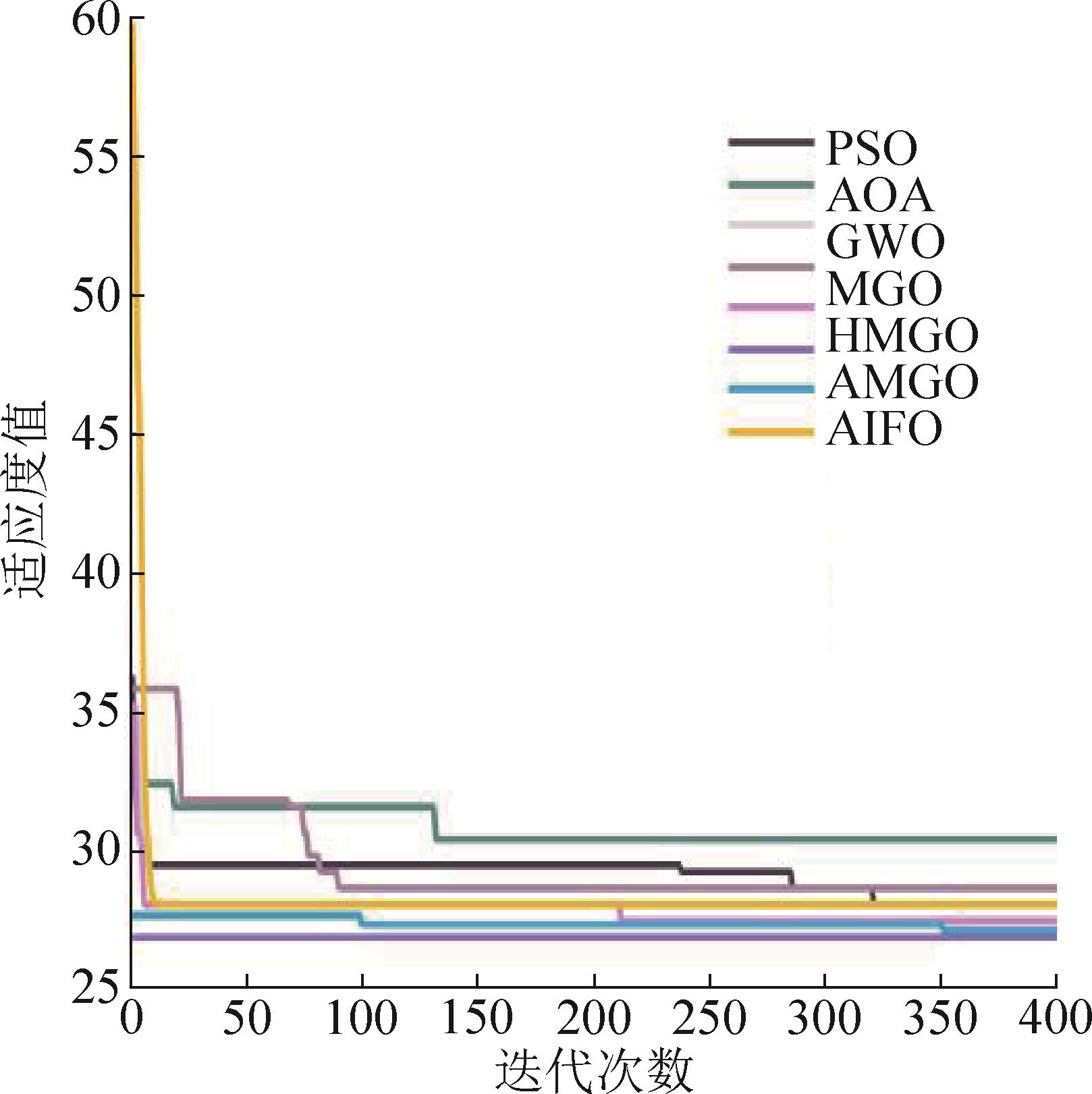
Table 8
Statistical results of path planning for a 40 m×40 m map
| 算法 | 最小值 | 最大值 | 平均值 | 标准差 |
|---|---|---|---|---|
| PSO | 82.2 | 134 | 101 | 6.47 |
| AOA | 83.3 | 112 | 96.5 | 8.04 |
| SSA | 57.5 | 57.5 | 57.5 | 1.14×10⁻13 |
| GWO | 71.2 | 145 | 83.3 | 18.7 |
| IAFO | 70 | 211 | 71.9 | 14 |
| AMGO | 68.9 | 211 | 74.4 | 13.6 |
| MGO | 69.5 | 211 | 75.3 | 13.4 |
| HMGO | 56.9 | 57.5 | 57.1 | 0.275 |
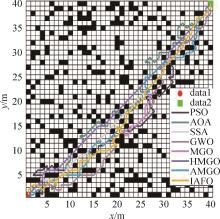
Fig. 12
Path planning in an environment of 40 m×40 m


Fig. 13
40 m×40 m Iterative curves
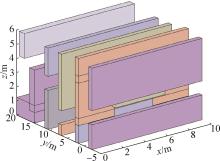
Fig. 14
3-dimensional space meshing
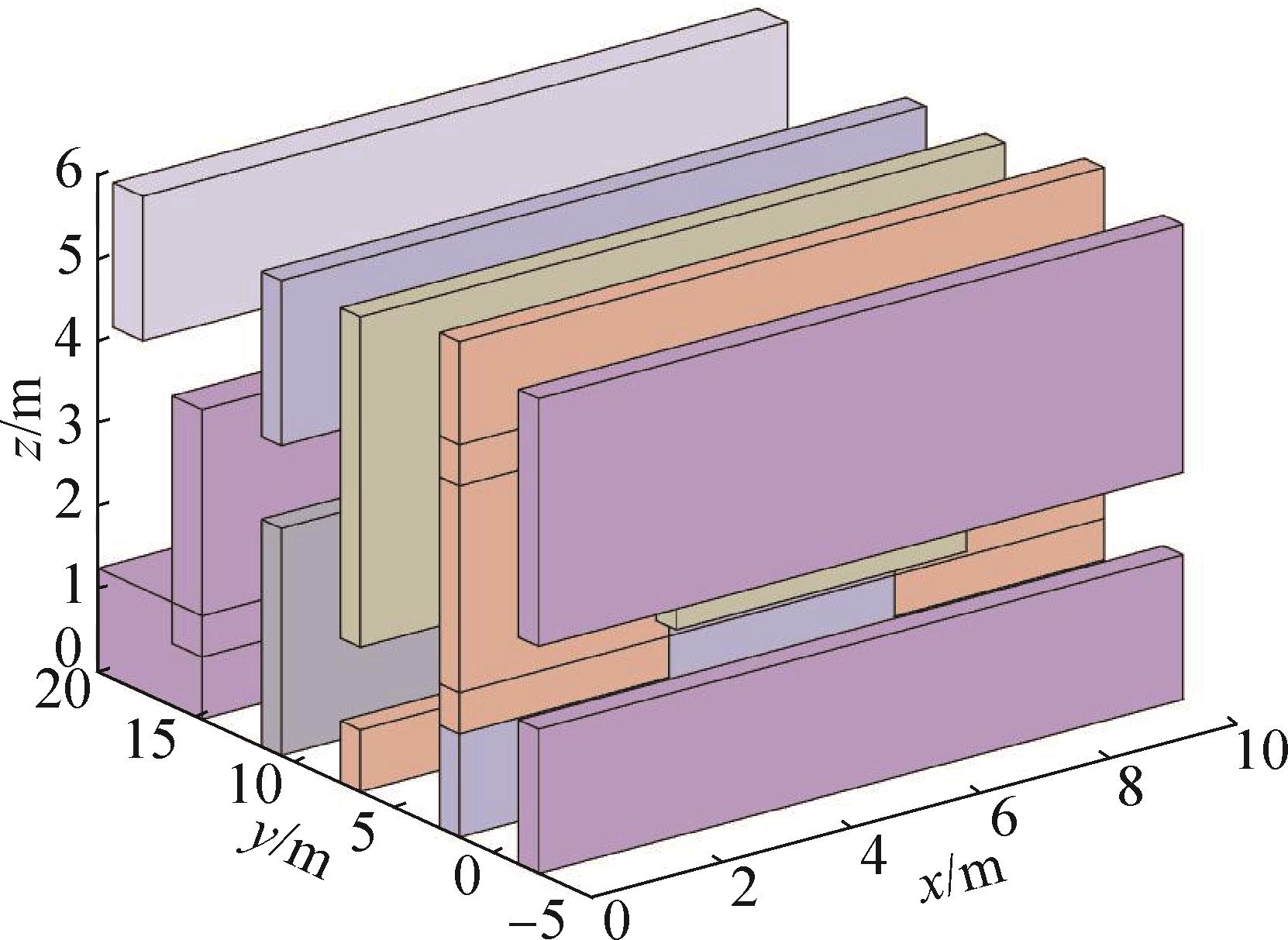
Table 9
Environmental parameters
| 编号 | 障碍物坐标 |
|---|---|
| 1 | [0, -2, 0][0, -2, 1.5][0, -3.5, 0][0, -3.5, 1.5][10, -2, 0][10, -2, 1.5][10, -3.5, 0][10, -3.5, 1.5] |
| 2 | [0, -2, 3][0, -2, 9][0, -3.5, 3][0, -3.5, 9][10, -2, 3][10, -2, 9][10, -3.5, 3][10, -3.5, 9] |
| 3 | [0, 2, 0][0, 2, 1.5][0, 4.5, 0][0, 4.5, 1.5][10, 2, 0][10, 2, 1.5][10, 4.5, 0][10, 4.5, 1.5] |
| 4 | [0, 2, 4.5][0, 2, 10.5][0, 4.5, 4.5][0, 4.5, 10.5][10, 2, 4.5][10, 2, 10.5][10, 4.5, 4.5][10, 4.5, 10.5] |
| 5 | [0, 7, 0][0, 7, 0.5][0, 14.5, 0][0, 14.5, 0.5][10, 7, 0][10, 7, 0.5][10, 14.5, 0][10, 14.5, 0.5] |
| 6 | [0, 11, 0][0, 11, 2.5][0, 22.5, 0][0, 22.5, 2.5][10, 11, 0][10, 11, 2.5][10, 22.5, 0][10, 22.5, 2.5] |
| 7 | [0, 11, 4][0, 11, 10][0, 22.5, 4][0, 22.5, 10][10, 11, 4][10, 11, 10][10, 22.5, 4][10, 22.5, 10] |
| 8 | [0, -2, 0][0, -2, 1.5][0, -3.5, 0][0, -3.5, 1.5][10, -2, 0][10, -2, 1.5][10, -3.5, 0][10, -3.5, 1.5] |
| 9 | [0, -2, 3][0, -2, 9][0, -3.5, 3][0, -3.5, 9][10, -2, 3][10, -2, 9][10, -3.5, 3][10, -3.5, 9] |
| 10 | [0, 2, 1.5][0, 2, 6][0, 4.5, 1.5][0, 4.5, 6][3, 2, 1.5][3, 2, 6][3, 4.5, 1.5][3, 4.5, 6] |
| 11 | [7, 2, 1.5][7, 2, 6][7, 4.5, 1.5][7, 4.5, 6][17, 2, 1.5][17, 2, 6][17, 4.5, 1.5][17, 4.5, 6] |
| 12 | [3, 0, 2.4][3, 0, 6.9][3, 0.5, 2.4][3, 0.5, 6.9][10, 0, 2.4][10, 0, 6.9][10, 0.5, 2.4][10, 0.5, 6.9] |
| 13 | [0, 15, 0][0, 15, 1][0, 35, 0][0, 35, 1][10, 15, 0][10, 15, 1][10, 35, 0][10, 35, 1] |
| 14 | [0, 15, 1][0, 15, 4.5][0, 31, 1][0, 31, 4.5][10, 15, 1][10, 15, 4.5][10, 31, 1.0][10, 31, 4.5] |
| 15 | [0, 18, 4.5][0, 18, 10.5][0, 37, 4.5][0, 37, 10.5][10, 18, 4.5][10, 18, 10.5][10, 37, 4.5][10, 37, 10.5] |

Fig. 15
3D space simulation results
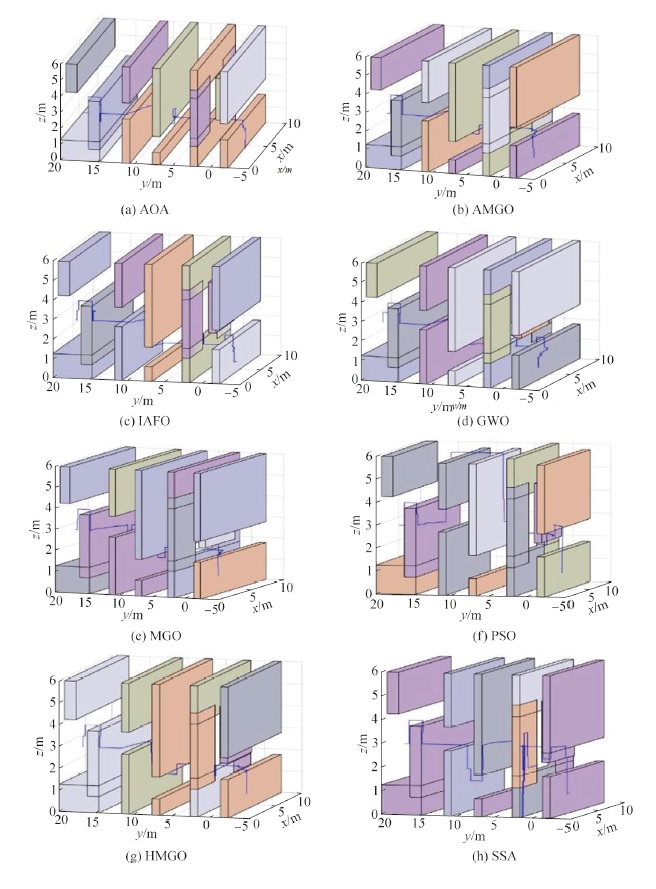
Table 10
Statistical results of 3D space path planning
| 算法 | 最小值 | 最大值 | 平均值 | 标准差 | 平均时间 |
|---|---|---|---|---|---|
| AOA | 3.28×10² | 3.68×10² | 3.32×10² | 7.50×10⁰ | 3.28×10² |
| HMGO | 3.09×10² | 3.75×10² | 3.15×10² | 7.03×10⁰ | 6.23×102 |
| AMGO | 3.11×10² | 4.33×10² | 3.17×10² | 9.50×10⁰ | 2.25×10² |
| IAFO | 3.15×10² | 3.79×10² | 3.19×10² | 1.24×10¹ | 3.15×10² |
| GWO | 3.33×10² | 3.82×10² | 3.34×10² | 5.38×10⁰ | 2.19×10¹ |
| PSO | 3.34×10² | 1.12×10³ | 3.55×10² | 5.21×10¹ | 3.34×10² |
| MGO | 3.14×10² | 4.06×10² | 3.22×10² | 1.30×10¹ | 3.14×10² |
| SSA | 3.77×10² | 3.97×10² | 3.78×10² | 3.62×10⁰ | 3.77×10² |
| 1 | José Ricardo Sánchez-Ibáñez. Carlos J Pérez-del-Pulgar, Alfonso García-Cerezo. Path Planning for Autonomous Mobile Robots: A Review[J]. Sensors, 2021, 21(23): 7898. |
| 2 | Fu Bing, Chen Lin, Zhou Yuntao, et al. An Improved A* Algorithm for the Industrial Robot Path Planning with High Success Rate and Short Length[J]. Robotics and Autonomous Systems, 2018, 106: 26-37. |
| 3 | Feng Jiahui, Mao Yuanyuan. Research on Analysis of Desert Crossing Problem Based on Dijkstra Model[J]. Journal of Physics: Conference Series, 2021, 1955(1): 012091. |
| 4 | 宋金泽, 戴斌, 单恩忠, 等. 一种改进的RRT路径规划算法[J]. 电子学报, 2010, 38(增1): 225-228. |
| Song Jinze, Dai Bin, Shan Enzhong, et al. An Improved RRT Path Planning Algorithm[J]. Acta Electronica Sinica, 2010, 38(S1): 225-228. | |
| 5 | Chang Lu, Shan Liang, Jiang Chao, et al. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment[J]. Autonomous Robots, 2021, 45(1): 51-76. |
| 6 | Zhu Qidan, Yan Yongjie, Xing Zhuoyi. Robot Path Planning Based on Artificial Potential Field Approach with Simulated Annealing[C]//Sixth International Conference on Intelligent Systems Design and Applications. Piscataway: IEEE, 2006: 622-627. |
| 7 | 李士勇, 李研, 林永茂. 智能优化算法与涌现计算[M]. 北京: 清华大学出版社, 2019. |
| Li Shiyong, Li Yan, Lin Yongmao. Intelligent Optimization Algorithms and Emergent Computation[M]. Beijing: Tsinghua University Press, 2019. | |
| 8 | Kennedy J, Eberhart R. Particle Swarm Optimization[C]//Proceedings of ICNN'95 - International Conference on Neural Networks. Piscataway: IEEE, 1995: 1942-1948. |
| 9 | Dorigo M, Di Caro G. Ant Colony Optimization: A New Meta-heuristic[C]//Proceedings of the 1999 Congress on Evolutionary Computation-CEC99. Piscataway: IEEE, 1999: 1470-1477. |
| 10 | Mirjalili Seyedali, Seyed Mohammad Mirjalili, Lewis Andrew. Grey Wolf Optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| 11 | Mirjalili Seyedali, Lewis Andrew. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| 12 | Song Baoye, Wang Zidong, Zou Lei. An Improved PSO Algorithm for Smooth Path Planning of Mobile Robots Using Continuous High-degree Bezier Curve[J]. Applied Soft Computing, 2021, 100: 106960. |
| 13 | 游达章, 康亚伟, 刘攀, 等. 一种改进灰狼优化算法的移动机器人路径规划方法[J]. 机床与液压, 2021, 49(11): 1-6. |
| You Dazhang, Kang Yawei, Liu Pan, et al. A Path Planning Method for Mobile Robot Based on Improved Grey Wolf Optimizer[J]. Machine Tool & Hydraulics, 2021, 49(11): 1-6. | |
| 14 | 张品, 李长勇. 能耗优化的改进IWOA-APF移动机器人路径规划[J]. 组合机床与自动化加工技术, 2022(11): 11-14. |
| Zhang Pin, Li Changyong. Improved IWOA-APF Path Planning for Mobile Robots Considering Energy Consumption[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(11): 11-14. | |
| 15 | Abdollahzadeh Benyamin, Farhad Soleimanian Gharehchopogh, Khodadadi N, et al. Mountain Gazelle Optimizer: A new Nature-inspired Metaheuristic Algorithm for Global Optimization Problems[J]. Advances in Engineering Software, 2022, 174: 103282. |
| 16 | Chandrasekaran Kumar, Alex Stanley Raja Thaveedhu, Manoharan Premkumar, et al. Optimal Estimation of Parameters of the Three-diode Commercial Solar Photovoltaic Model Using an Improved Berndt-hall-hall-hausman Method Hybridized with an Augmented Mountain Gazelle Optimizer[J]. Environmental Science and Pollution Research, 2023, 30(20): 57683-57706. |
| 17 | Wang Tianlei, Li Junhui, Liu Renju, et al. Dynamic Grey Wolf Optimization Algorithm Based on Quasi-opposition Learning[C]//3D Imaging—Multidimensional Signal Processing and Deep Learning. Singapore: Springer Nature Singapore, 2022: 11-22. |
| 18 | Hasanipanah Mahdi, Keshtegar Behrooz, Duc Kien Thai, et al. An ANN-adaptive Dynamical Harmony Search Algorithm to Approximate the Flyrock Resulting from Blasting[J]. Engineering with Computers, 2022, 38(2): 1257-1269. |
| 19 | Abualigah Laith, Diabat Ali, Mirjalili Seyedali, et al. The Arithmetic Optimization Algorithm[J]. Computer Methods in Applied Mechanics and Engineering, 2021, 376: 113609. |
| 20 | Mirjalili Seyedali. SCA: A Sine Cosine Algorithm for Solving Optimization Problems[J]. Knowledge-Based Systems, 2016, 96: 120-133. |
| 21 | 贾鹤鸣, 刘庆鑫, 刘宇翔, 等. 融合动态反向学习的阿奎拉鹰与哈里斯鹰混合优化算法[J]. 智能系统学报, 2023, 18(1): 104-116. |
| Jia Heming, Liu Qingxin, Liu Yuxiang, et al. Hybrid Aquila and Harris Hawks Optimization Algorithm with Dynamic Opposition-based Learning[J]. CAAI Transactions on Intelligent Systems, 2023, 18(1): 104-116. | |
| 22 | Deng Wu, Ni Hongcheng, Liu Yi, et al. An Adaptive Differential Evolution Algorithm Based on Belief Space and Generalized Opposition-based Learning for Resource Allocation[J]. Applied Soft Computing, 2022, 127: 109419. |
| 23 | Betül Sultan Yildiz, Pholdee Nantiwat, Bureerat Sujin, et al. Enhanced Grasshopper Optimization Algorithm Using Elite Opposition-based Learning for Solving Real-world Engineering Problems[J]. Engineering with Computers, 2022, 38(5): 4207-4219. |
| 24 | Roy P K, Mandal D. Quasi-oppositional Biogeography-based Optimization for Multi-objective Optimal Power Flow[J]. Electric Power Components and Systems, 2011, 40(2): 236-256. |
| 25 | Tang Chenjun, Sun Wei, Xue Min, et al. A Hybrid Whale Optimization Algorithm with Artificial Bee Colony[J]. Soft Computing, 2022, 26(5): 2075-2097. |
| 26 | Ahmadianfar Iman, Ali Asghar Heidari, Gandomi Amir H, et al. RUN Beyond the Metaphor: An Efficient Optimization Algorithm Based on Runge Kutta Method[J]. Expert Systems with Applications, 2021, 181: 115079. |
| 27 | 高炳微, 申伟, 戴野, 等. 基于改进萤火虫算法的摩擦模型参数辨识及补偿[J]. 振动与冲击, 2023, 42(6): 69-78. |
| Gao Bingwei, Shen Wei, Dai Ye, et al. Parameter Identification and Compensation of a Friction Model Based on Improved Glowworm Swarm Optimization[J]. Journal of Vibration and Shock, 2023, 42(6): 69-78. | |
| 28 | Shiv Ram Dubey, Satish Kumar Singh, Bidyut Baran Chaudhuri. Activation Functions in Deep Learning: A Comprehensive Survey and Benchmark[J]. Neurocomputing, 2022, 503: 92-108. |
| 29 | Rashedi Esmat, Hossein Nezamabadi Pour, Saryazdi Saeid. GSA: A Gravitational Search Algorithm[J]. Information Sciences, 2009, 179(13): 2232-2248. |
| 30 | Malik Shehadeh Braik. Chameleon Swarm Algorithm: A Bio-inspired Optimizer for Solving Engineering Design Problems[J]. Expert Systems with Applications, 2021, 174: 114685. |
| 31 | Dehghani Mohammad, Hubálovský Štěpán, Trojovský Pavel. Northern Goshawk Optimization: A New Swarm-based Algorithm for Solving Optimization Problems[J]. IEEE Access, 2021, 9: 162059-162080. |
| 32 | Wilcoxon F, Katti S, Wilcox R A. Critical Values and Probability Levels for the Wilcoxon Rank Sum Test and the Wilcoxon Signed Rank Test[J]. Selected Tables in Mathematical Statistics, 1970, 1: 171-259. |
| 33 | 韩忠华, 冯兴浩, 吕哲, 等. 一种改进的无人机路径规划环境建模方法[J]. 信息与控制, 2018, 47(3): 371-378. |
| Han Zhonghua, Feng Xinghao, Zhe Lü, et al. An Improved UAV Path Planning Environment Modeling Method[J]. Information and Control, 2018, 47(3): 371-378. | |
| 34 | Yang Zhe, Deng Libao, Wang Yuchen, et al. Aptenodytes Forsteri Optimization: Algorithm and Applications[J]. Knowledge-Based Systems, 2021, 232: 107483. |
| 35 | Song Peicheng, Shyang Pan Jeng, Chu Shuchuan. A Parallel Compact Cuckoo Search Algorithm for Three-dimensional Path Planning[J]. Applied Soft Computing, 2020, 94: 106443. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
