

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (8): 2074-2088.doi: 10.16182/j.issn1004731x.joss.24-0229
• Papers • Previous Articles Next Articles
Zhang Kaixiang1, Mao Jianlin2, Wang Niya2, Xu Zhihao2
Received:2024-03-12
Revised:2024-04-02
Online:2025-08-20
Published:2025-08-26
Contact:
Mao Jianlin
CLC Number:
Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference[J]. Journal of System Simulation, 2025, 37(8): 2074-2088.
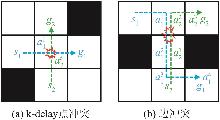
Fig. 1
Classification of k-delay conflicts
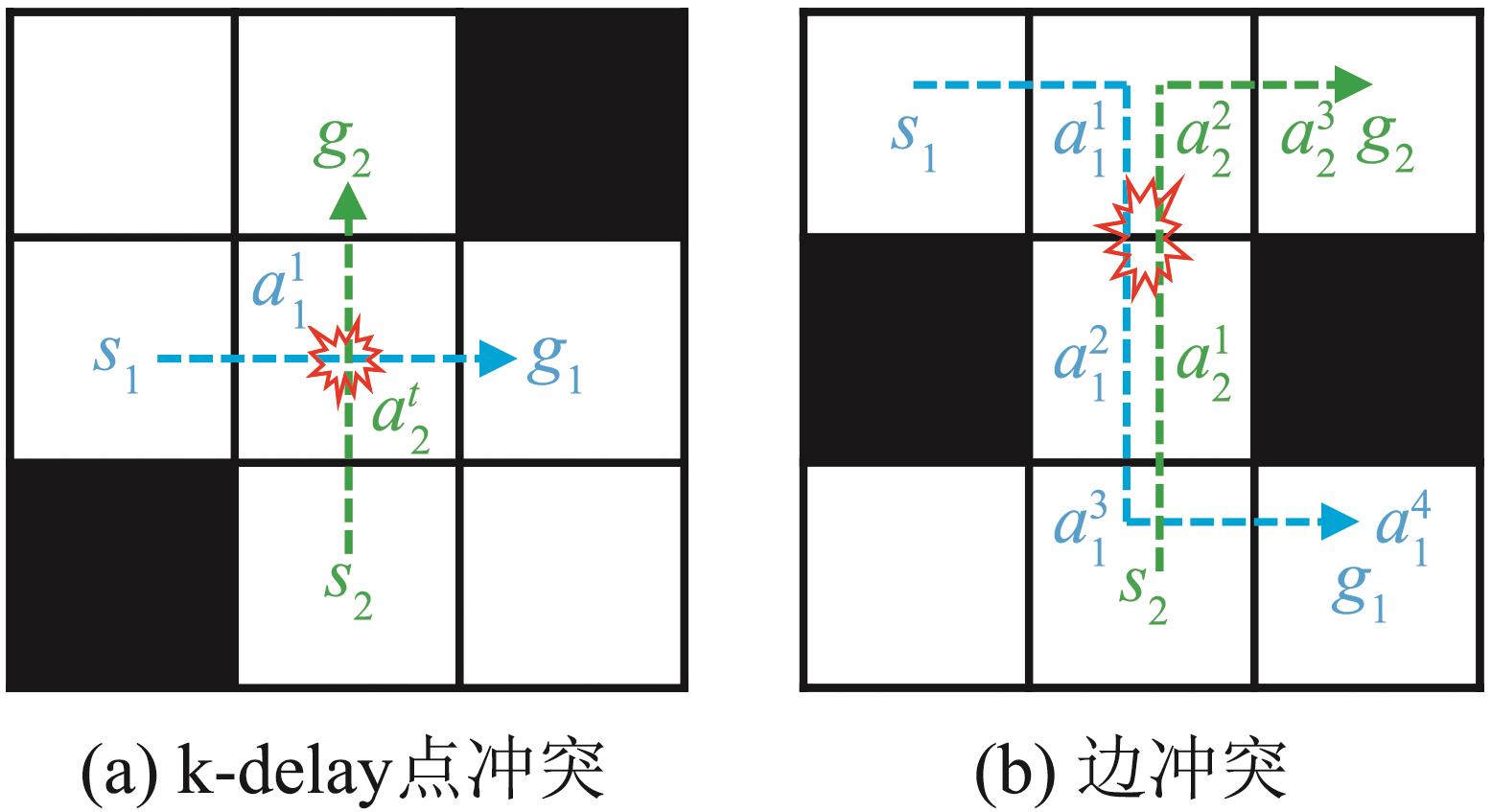

Fig. 2
Example of k-robust planning scheme
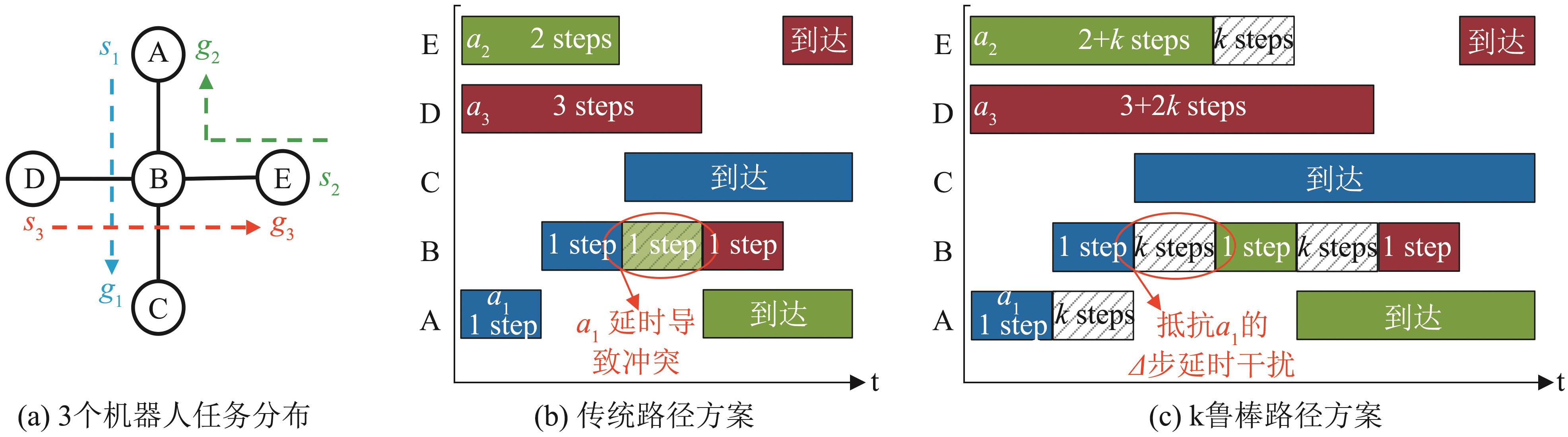
Fig. 3
k-robust hierarchical collaborative framework
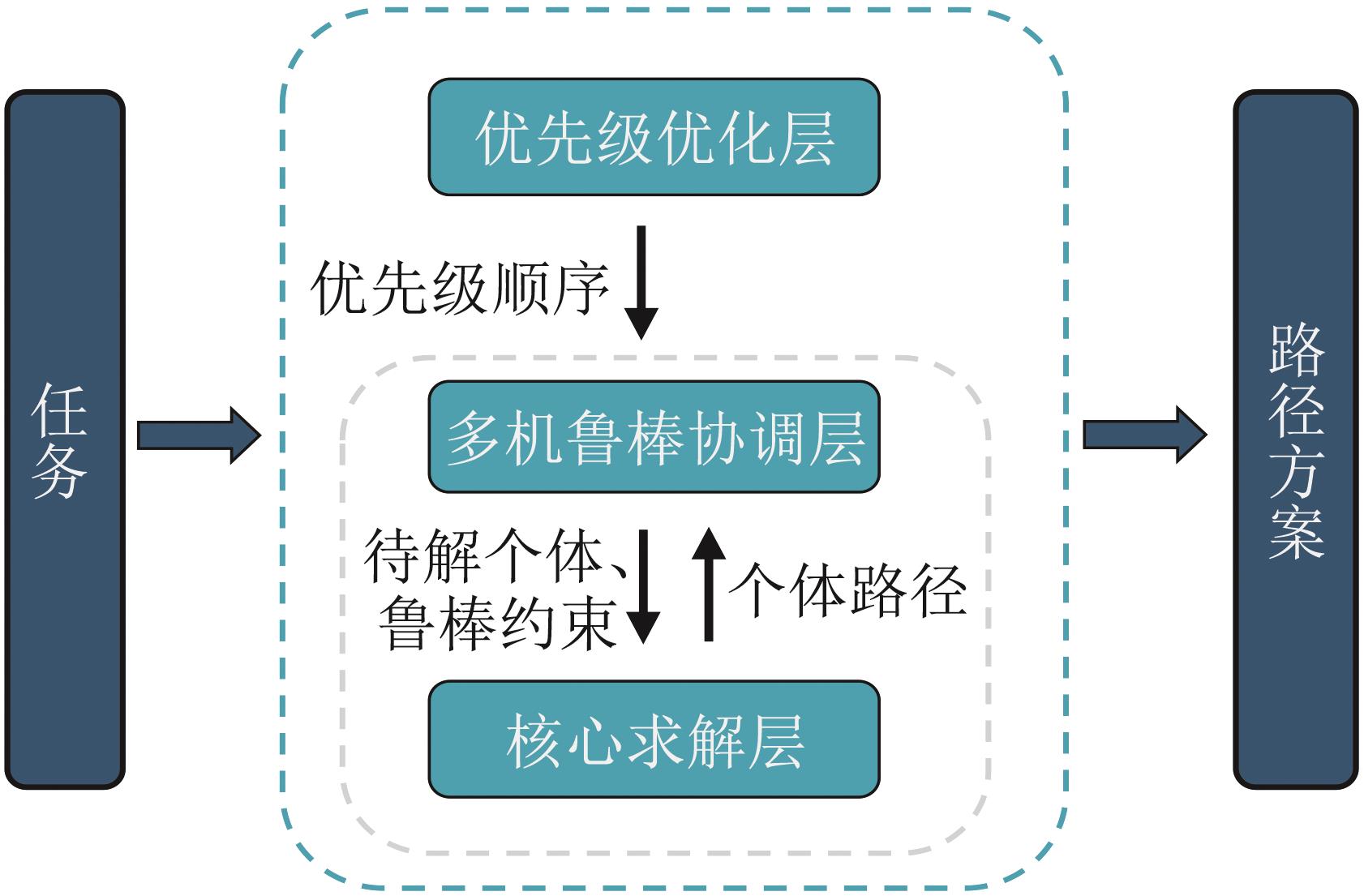

Fig. 4
k-robust constraint generation process
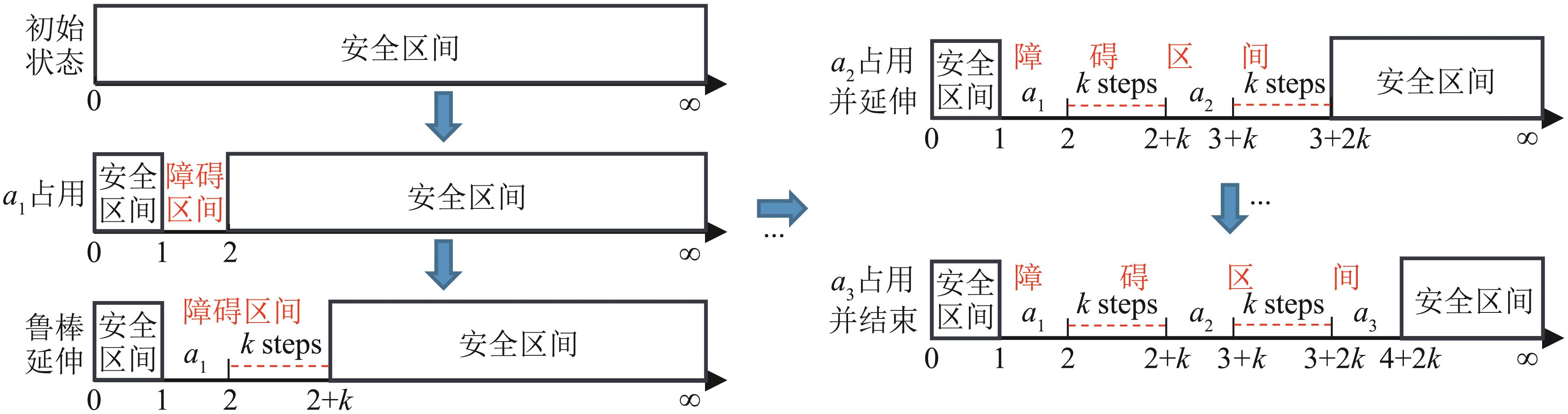

Fig. 5
k-robust starting predicament
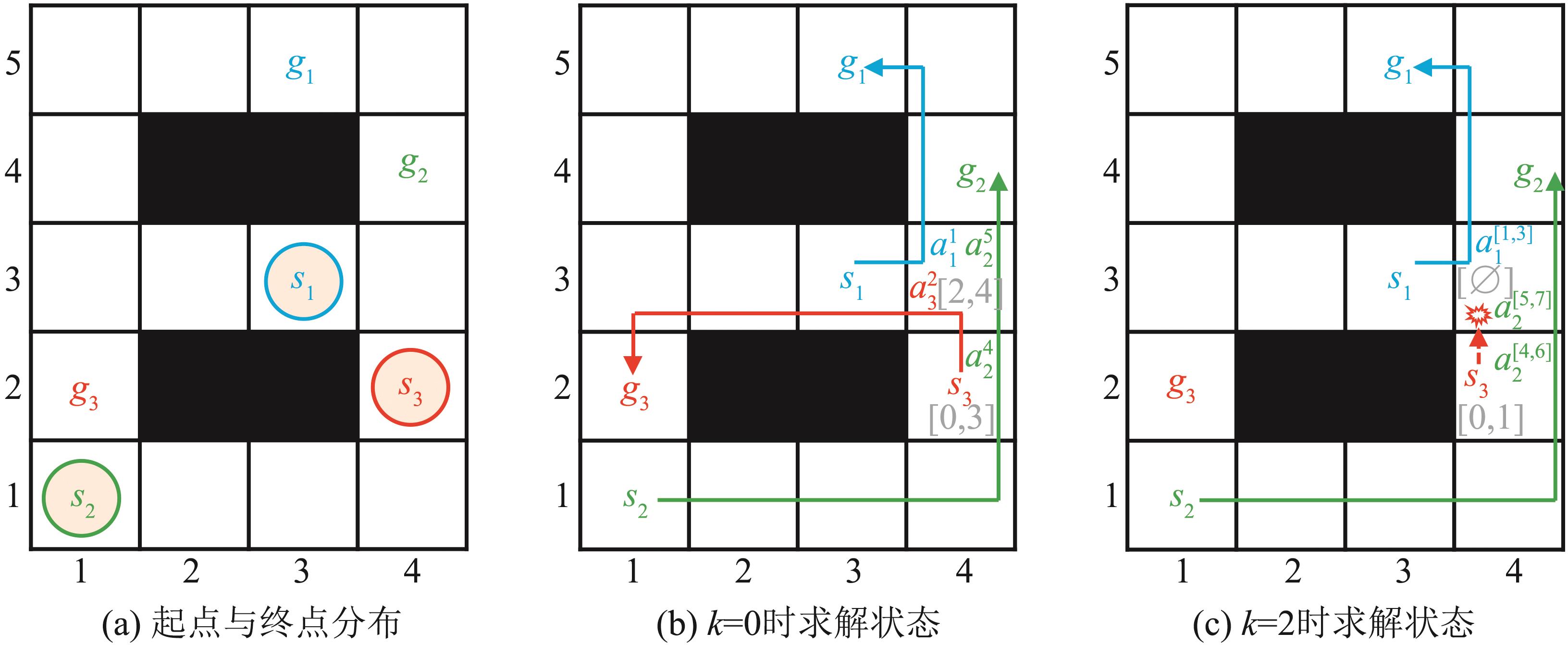

Fig. 6
Main components of closure factor
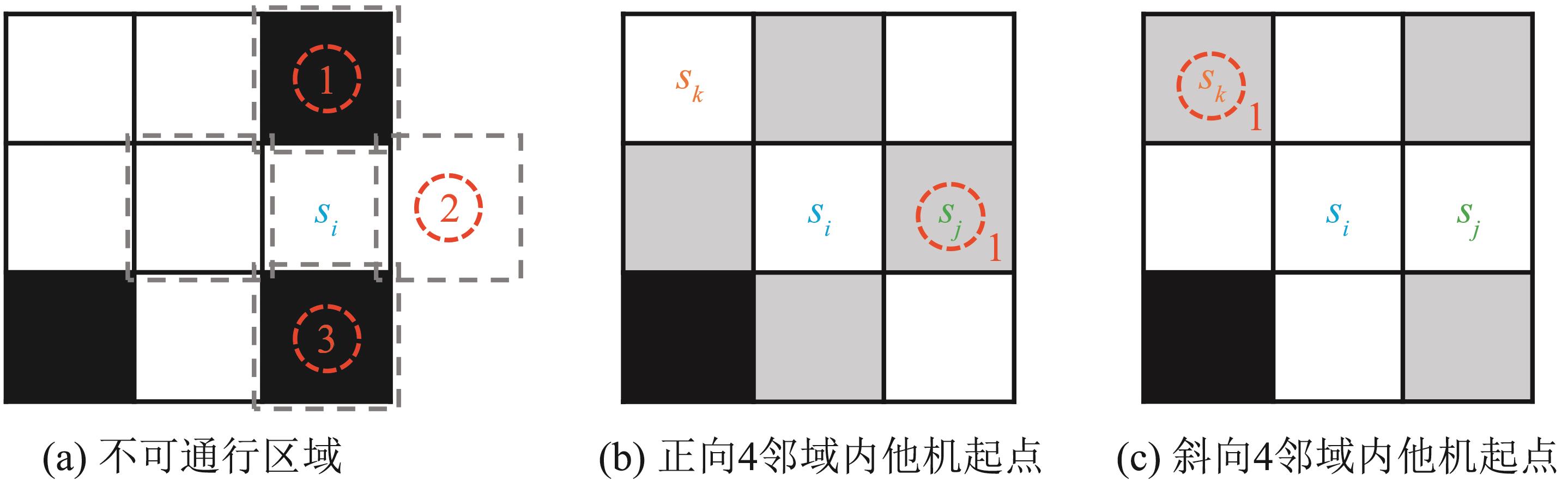

Fig. 7
Dynamic evolution process of resistance factor
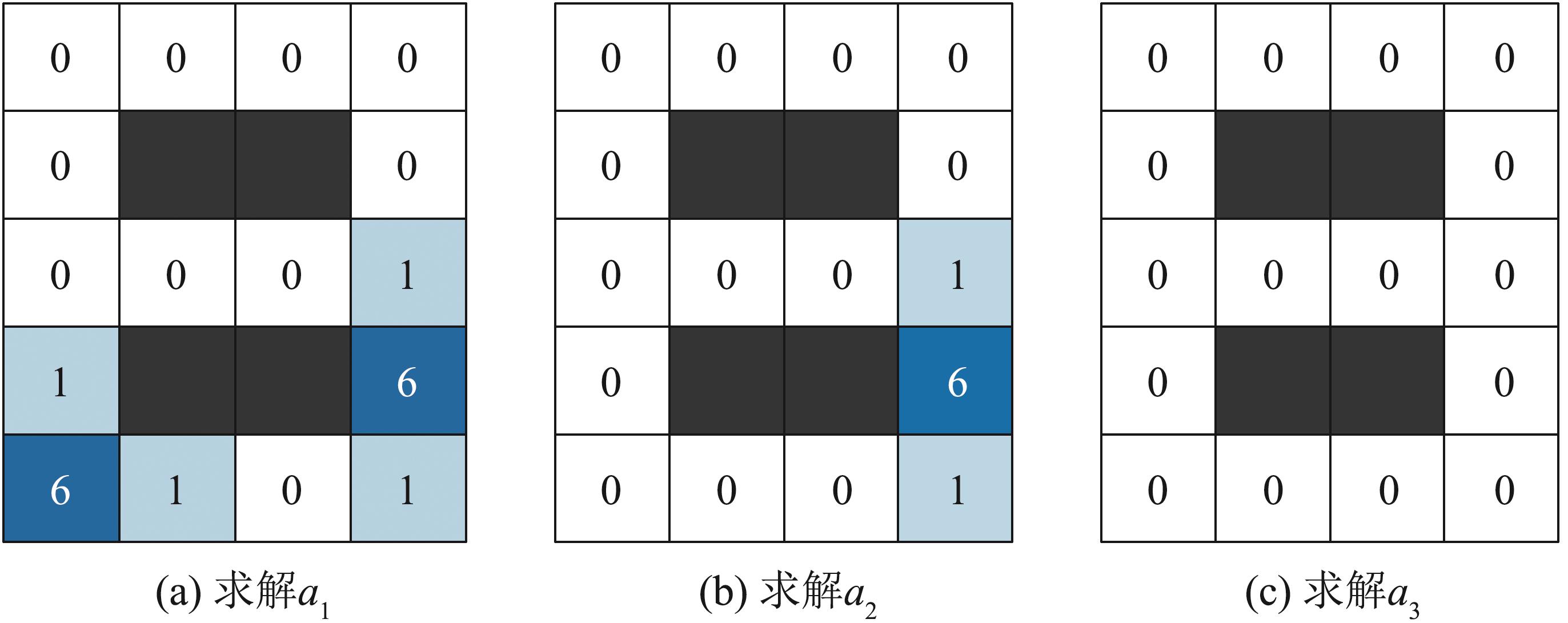
Fig. 8
Path adjustment guided by resistance factor
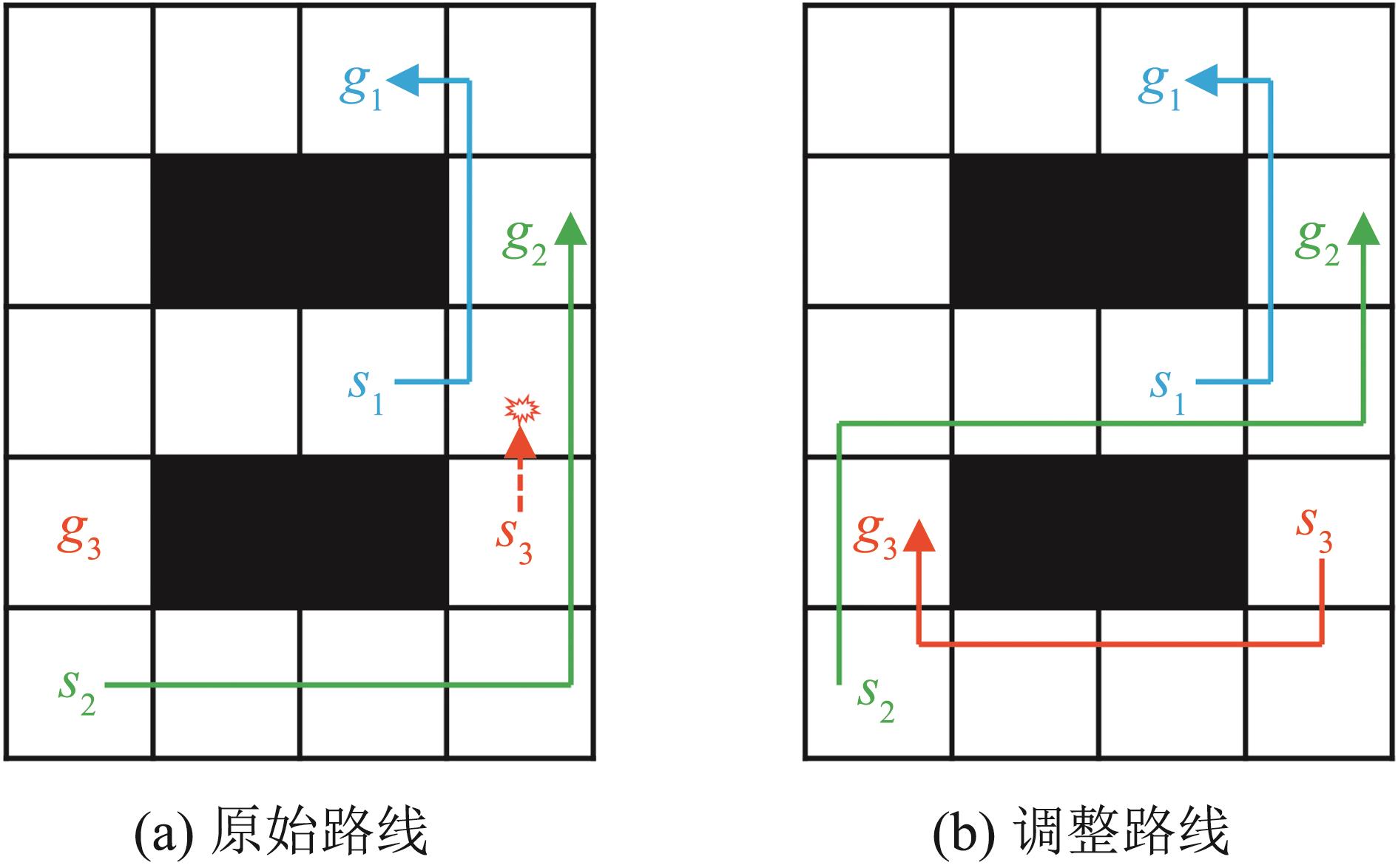
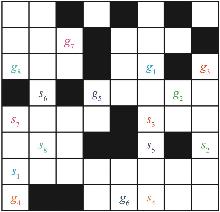
Fig. 9
Small-scale test map and its task distributions
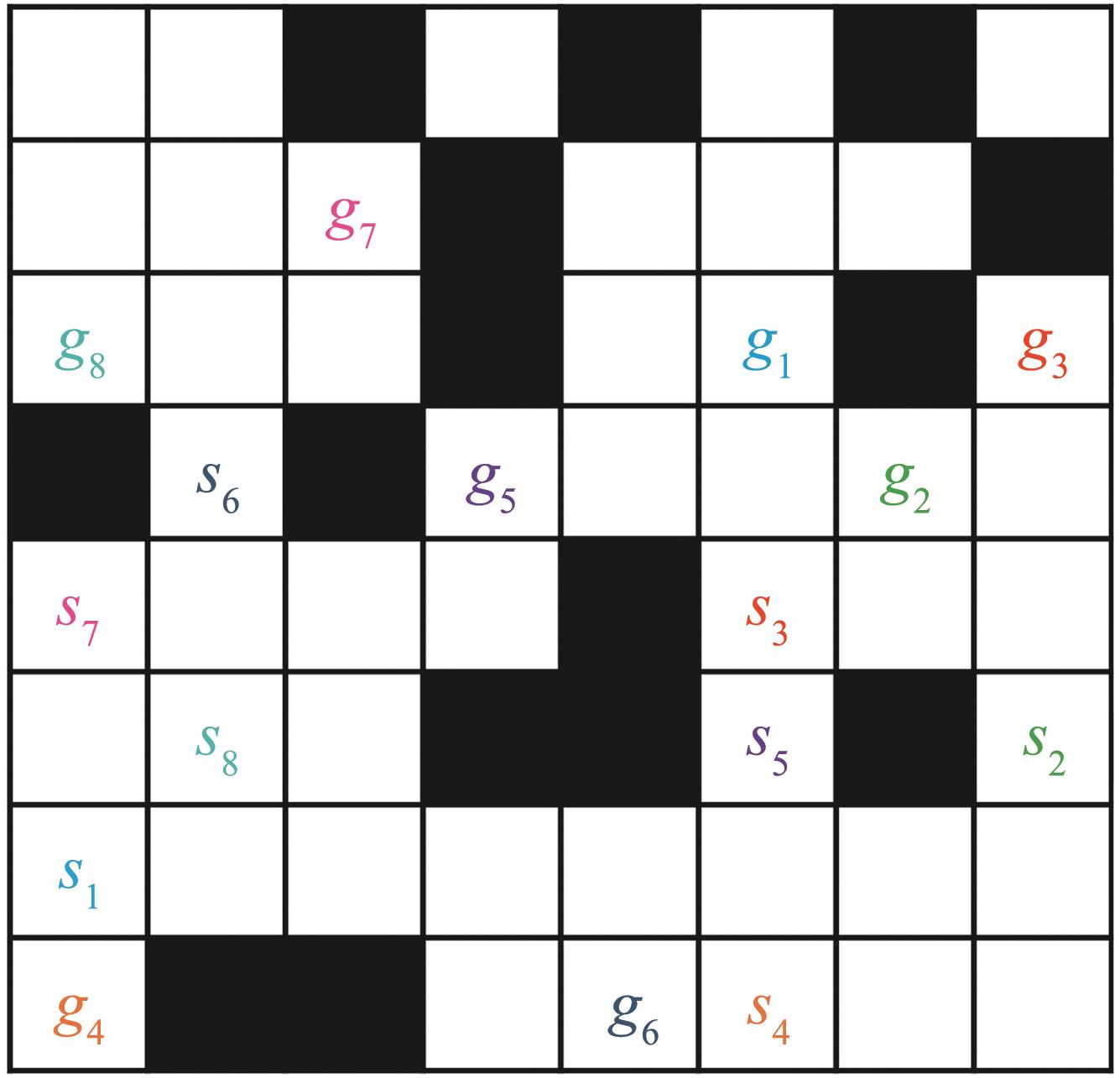
Table 1
Results of small scale instance
| k值 | 求解时间/ms | SoC/步 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| kR-EPEA* | kR-CBS | IkR-CBS | kR-SIPP | IkR-SIPP | kR-EPEA* | kR-CBS | IkR-CBS | kR-SIPP | IkR-SIPP | |
| 0 | 32.53 | 35.25 | 32.51 | 1.92 | 1.96 | 49 | 49 | 49 | 52 | 51 |
| 1 | 50 273.51 | 49 744.77 | 864.16 | 2.02 | 2.03 | 55 | 55 | 55 | 60 | 60 |
| 2 | NA | NA | 59 105.80 | 2.09 | 2.28 | NA | NA | 63 | 74 | 78 |
| 3 | NA | NA | NA | 2.40 | 2.46 | NA | NA | NA | 103 | 88 |
| 4 | NA | NA | NA | NA | 2.34 | NA | NA | NA | NA | 98 |
| 5 | NA | NA | NA | NA | 2.62 | NA | NA | NA | NA | 108 |
Table 2
Solution of IkR-SIPP in case of k=5
| 机器人 | 路径 | 具体方案 |
|---|---|---|
| a1 | {(1,2), (2,2), (2,2), (2,2), (2,2), (2,2), (2,2), (2,2), (2,2), (2,2), (3,2), (4,2), (5,2), (6,2), (6,3), (6,4), (6,5), (6,6)} | |
| a2 | {(8,3), (8,4), (8,5), (7,5)} | |
| a3 | {(6,4), (7,4), (7,4), (7,4), (7,4), (7,4), (7,4), (8,4), (8,5), (8,6)} | |
| a4 | {(6,1), (5,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,1), (4,2), (3,2), (2,2), (1,2), (1,1)} | |
| a5 | {(6,3), (6,2), (5,2), (4,2), (3,2), (3,3), (3,4), (4,4), (4,5)} | |
| a6 | {(2,5), (2,6), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,7), (2,6), (2,5), (2,4), (3,4), (3,3), (3,2), (4,2), (5,2), (5,1)} | |
| a7 | {(1,4), (2,4), (2,4), (2,4), (2,4), (2,4), (2,5), (2,6), (3,6), (3,7)} | |
| a8 | {(2,3), (2,3), (2,3), (2,3), (2,3), (2,3), (2,3), (2,3), (2,3), (2,3), (2,3), (2,4), (2,5), (2,6), (1,6)} |

Fig. 10
Experimental results under path interferences

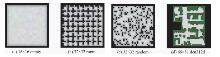
Fig. 11
Maps for large-scale random testing

Fig. 12
Spatiotemporal distribution of multi-robot paths
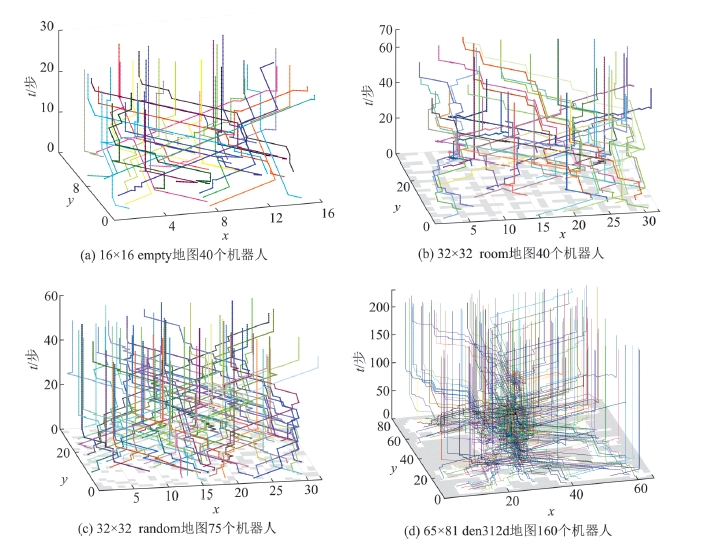
Fig. 13
Results of success rate
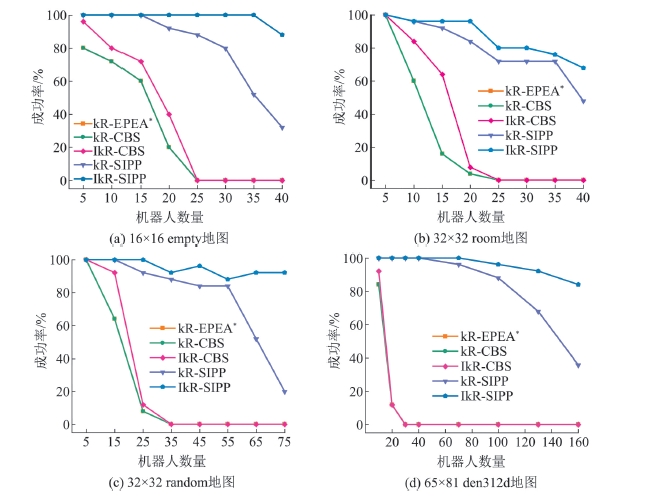
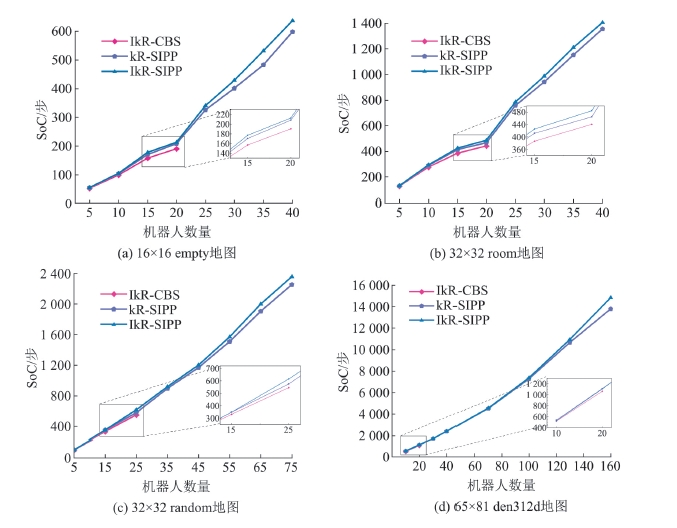
Fig. 14
Results of path cost
| [1] | Li Changmin, Zhang Lu, Zhang Liang. A Route and Speed Optimization Model to Find Conflict-free Routes for Automated Guided Vehicles in Large Warehouses Based on Quick Response Code Technology[J]. Advanced Engineering Informatics, 2022, 52: 101604. |
| [2] | Okumura Keisuke, Machida Manao, Défago Xavier, et al. Priority Inheritance with Backtracking for Iterative Multi-agent Path Finding[J]. Artificial Intelligence, 2022, 310: 103752. |
| [3] | Wang Hanlin, Rubenstein M. Walk, Stop, Count, and Swap: Decentralized Multi-agent Path Finding with Theoretical Guarantees[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1119-1126. |
| [4] | Kudo Fumiya, Cai Kai. A TSP-based Online Algorithm for Multi-task Multi-agent Pickup and Delivery[J]. IEEE Robotics and Automation Letters, 2023, 8(9): 5910-5917. |
| [5] | Hu Kewei, Chen Zheng, Kang Hanwen, et al. 3D Vision Technologies for a Self-developed Structural External Crack Damage Recognition Robot[J]. Automation in Construction, 2024, 159: 105262. |
| [6] | Ratner D, Warmuth M. Finding a Shortest Solution for the N × N Extension of the 15-puzzle is Intractable[C]//Proceedings of the Fifth AAAI National Conference on Artificial Intelligence. Palo Alto: AAAI Press, 1986: 168-172. |
| [7] | Sharon G. Novel Search Techniques for Path Finding in Complex Environment[D]. Be'er Sheva: Ben-Gurion University of the Negev, 2015. |
| [8] | Ma Hang. Target Assignment and Path Planning for Navigation Tasks with Teams of Agents[D]. Los Angeles : University of Southern California, 2020. |
| [9] | Sharon Guni, Stern Roni, Felner Ariel, et al. Conflict-based Search for Optimal Multi-agent Pathfinding[J]. Artificial Intelligence, 2015, 219: 40-66. |
| [10] | 张洪琳, 吴耀华, 胡金昌, 等. 一种基于改进冲突搜索的多机器人路径规划算法[J]. 控制与决策, 2023, 38(5): 1327-1335. |
| Zhang Honglin, Wu Yaohua, Hu Jinchang, et al. A Multi-robot Path Finding Algorithm Based on Improved Conflict Search[J]. Control and Decision, 2023, 38(5): 1327-1335. | |
| [11] | Boyarski Eli, Felner Ariel, Stern Roni, et al. ICBS: The Improved Conflict-based Search Algorithm for Multi-agent Pathfinding[C]//Proceedings of the International Symposium on Combinatorial Search: Palo Alto: AAAI Press, 2015: 223-225. |
| [12] | Barer Max, Sharon Guni, Stern Roni, et al. Suboptimal Variants of the Conflict-based Search Algorithm for the Multi-agent Pathfinding Problem[C]//Proceedings of the Twenty-first European Conference on Artificial Intelligence. NLD: IOS Press, 2014: 961-962. |
| [13] | Li Jiaoyang, Harabor Daniel, Stuckey Peter J, et al. Pairwise Symmetry Reasoning for Multi-agent Path Finding Search[J]. Artificial Intelligence, 2021, 301: 103574. |
| [14] | Erdmann M, Lozano-Pérez Tomás. On Multiple Moving Objects[J]. Algorithmica, 1987, 2(1): 477-521. |
| [15] | Silver David. Cooperative Pathfinding[C]//Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment. Palo Alto: AAAI Press, 2021: 117-122. |
| [16] | Phillips M, Likhachev M. SIPP: Safe Interval Path Planning for Dynamic Environments[C]//Proc.of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 5628-5635. |
| [17] | Yakovlev Konstantin, Andreychuk Anton, Stern Roni. Revisiting Bounded-suboptimal Safe Interval Path Planning[C]//Proceedings of the International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 300-304. |
| [18] | Chen Zhe, Alonso-Mora Javier, Bai Xiaoshan, et al. Integrated Task Assignment and Path Planning for Capacitated Multi-agent Pickup and Delivery[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5816-5823. |
| [19] | Ma Hang. Graph-based Multi-robot Path Finding and Planning[J]. Current Robotics Reports, 2022, 3(3): 77-84. |
| [20] | Tai Ruochen, Wang Jingchuan, Chen Weidong. A Prioritized Planning Algorithm of Trajectory Coordination Based on Time Windows for Multiple AGVs with Delay Disturbance[J]. Assembly Automation, 2019, 39(5): 753-768. |
| [21] | Atzmon Dor, Diei Amit, Rave Daniel. Multi-train Path Finding[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2019: 125-129. |
| [22] | 张丹露, 孙小勇, 傅顺, 等. 智能仓库中的多机器人协同路径规划方法[J]. 计算机集成制造系统, 2018, 24(2): 410-418. |
| Zhang Danlu, Sun Xiaoyong, Fu Shun, et al. Cooperative Path Planning in Multi-robots for Intelligent Warehouse[J]. Computer Integrated Manufacturing Systems, 2018, 24(2): 410-418. | |
| [23] | Nekvinda Michal, Barták Roman. Contingent Planning for Robust Multi-agent Path Finding[C]//2021 IEEE 33rd International Conference on Tools with Artificial Intelligence (ICTAI). Piscataway: IEEE, 2021: 487-492. |
| [24] | Semiz Fatih, Polat Faruk. Incremental Multi-agent Path Finding[J]. Future Generation Computer Systems, 2021, 116: 220-233. |
| [25] | Koenig S, Likhachev M. D*Lite[C]//Eighteenth National Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2002: 476-483. |
| [26] | 曹其新, 黄先群, 朱笑笑, 等. 基于保留区域的分布式多机器人路径规划[J]. 华中科技大学学报(自然科学版), 2018, 46(12): 71-76. |
| Cao Qixin, Huang Xianqun, Zhu Xiaoxiao, et al. Distributed Multi-robot Path Planning Based on Reserved Area[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2018, 46(12): 71-76. | |
| [27] | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[英][J]. 系统仿真学报, 2024, 36(1): 1-26. |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[Eng.][J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| [28] | Atzmon Dor, Stern Roni, Felner Ariel, et al. Robust Multi-agent Path Finding[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2018: 1-9. |
| [29] | Goldenberg Meir, Felner Ariel, Stern R, et al. Enhanced Partial Expansion A*[J]. Journal of Artificial Intelligence Research, 2014, 50(1): 141-187. |
| [30] | Chen Zhe, Harabor Daniel D, Li Jiaoyang, et al. Symmetry Breaking for k-robust Multi-agent Path Finding[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021: 12267-12274. |
| [31] | Atzmon Dor, Stern Roni, Felner Ariel, et al. Robust Multi-agent Path Finding and Executing[J]. Journal of Artificial Intelligence Research, 2020, 67: 549-579. |
| [32] | 李昊楠, 毛剑琳, 张凯翔, 等. 一种基于安全区间的多机器人路径k鲁棒规划算法[J]. 仪器仪表学报, 2023, 44(10): 274-282. |
| Li Haonan, Mao Jianlin, Zhang Kaixiang, et al. Multi-robot Path k Robust Planning Algorithm Based on Safe Interval[J]. Chinese Journal of Scientific Instrument, 2023, 44(10): 274-282. | |
| [33] | 张凯翔, 毛剑琳, 向凤红, 等. 基于讨价还价博弈机制的B-IHCA*多机器人路径规划算法[J]. 自动化学报, 2023, 49(7): 1483-1497. |
| Zhang Kaixiang, Mao Jianlin, Xiang Fenghong, et al. B-IHCA*, a Bargaining Game Based Multi-agent Path Finding Algorithm[J]. Acta Automatica Sinica, 2023, 49(7): 1483-1497. | |
| [34] | Li Jiaoyang, Ruml W, Koenig S. EECBS: A Bounded-suboptimal Search for Multi-agent Path Finding[C]//Proceedings of the AAAI Conference on Artificial Intelligence: AAAI Press, 2021: 12353-12362. |
| [35] | Stern Roni, Sturtevant Nathan, Felner Ariel, et al. Multi-agent Pathfinding: Definitions, Variants, and Benchmarks[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2019: 151-158. |
| [36] | Standley T. Finding Optimal Solutions to Cooperative Pathfinding Problems[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2010: 173-178. |
| [37] | Zain Alabedeen Ali, Yakovlev Konstantin. Safe Interval Path Planning with Kinodynamic Constraints[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2023: 12330-12337. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Wang Haoyu, Wu Yayong, Jiang Guoping, Zheng Ying, Zhou Xuanxin. Topology Identification of Complex Dynamical Networks Under Dynamical Saturation Inputs [J]. Journal of System Simulation, 2026, 38(5): 1174-1186. |
| [3] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [4] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [5] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [6] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [7] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
