

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (11): 2754-2767.doi: 10.16182/j.issn1004731x.joss.24-0678
• Papers • Previous Articles Next Articles
Xing Lijing1, Li Min1, Zeng Xiangguang1, Zhang Ping2, Peng Bei2
Received:2024-06-26
Revised:2024-09-11
Online:2025-11-18
Published:2025-11-27
Contact:
Li Min
CLC Number:
Xing Lijing, Li Min, Zeng Xiangguang, Zhang Ping, Peng Bei. AUV Path Planning Based on Behavior Cloning and Improved DQN in Partially Unknown Environments[J]. Journal of System Simulation, 2025, 37(11): 2754-2767.

Fig. 1
AUV simulation model


Fig. 2
Scene description


Fig. 3
DQN algorithm

Table 1
Parameters used in this article
| 参数名称 | 参数值 |
|---|---|
| Q网络学习率 | 0.000 1 |
| 行为克隆学习率 | 0.000 1 |
| 折扣因子 | 0.999 |
| 每回合采样数量 | 128 |
| 经验池容量 | 10 000 |
| 回合最大步数限制 | 1.5×A*规划步数 |

Fig. 4
A_DQN algorithm

Table 2
Comparison of different models' performance after 2 000 training epochs
| 算法名称 | 是否扩张经验池 | 随机采样 | 穿统 采样 | 新采样 | ||||
|---|---|---|---|---|---|---|---|---|
| EPRO_A_DQN | √ | × | × | √ | 8/10 | 9.486/75.86 | 0.193/1.540 | 3.62/28.97 |
| EPER_A_DQN | √ | × | √ | × | 5/10 | 9.730/48.64 | 0.224/1.120 | 4.40/22.00 |
| ER_A_DQN | √ | √ | × | × | 5/10 | 11.46/57.28 | 0.227/1.130 | 4.59/22.94 |
| PRO_A_DQN | × | × | × | √ | 4/10 | 12.24/48.97 | 0.289/1.157 | 5.42/21.66 |
| PER_A_DQN | × | × | √ | × | 4/10 | 15.63/62.53 | 0.292/1.168 | 4.84/19.34 |
| A_DQN | × | √ | × | × | 3/10 | 24.59/73.79 | 0.648/1.944 | 8.97/26.91 |
| DQN | × | × | × | × | 0/10 | -/46.43 | -/0.940 | -/18.53 |

Fig. 5
BA_DQN algorithm framework


Fig. 6
Comparison of training effects between BA_DQN and EPRO_A_DQN


Fig. 7
Comparison of path performance between BA_DQN and EPRO_A_DQN

Table 3
Parameters across different scenarios
| 场景 | 目标点数量 | 障碍物数量 | 动静比例 |
|---|---|---|---|
| 场景Ⅰ | 1 | 45 | 8:1 |
| 场景Ⅱ | 1 | 80 | 7:1 |
| 场景Ⅲ | 10 | 45 | 8:1 |
| 场景Ⅳ | 10 | 80 | 7:1 |

Fig. 8
Comparison effect of A* path and BA_DQN path in four scenarios

Table 4
Different algorithms for ablation comparison
| 算法名称 | 行为 克隆 | A*替换 随机动作 | 改进 经验池 |
|---|---|---|---|
| BA_DQN | √ | √ | √ |
| EPRO_A_DQN | × | √ | √ |
| DQN_BC | √ | × | × |
| DQN | × | × | × |
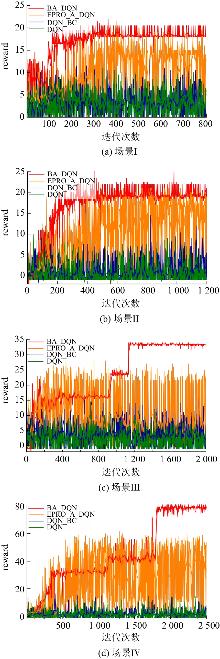
Fig. 9
Comparison of ablations across four scenarios


Fig. 10
Reward comparison curves in four scenarios


Fig. 11
Loss of behavior cloning models in four scenarios

Table 5
Comparison of time efficiency across five experimental groups in four scenarios
| 场景 | 算法 | 实验1 | 实验2 | 实验3 | 实验4 | 实验5 | 平均用时 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ⅰ | BA_DQN | 0.33 | 21.6 | 0.30 | 25.5 | 0.32 | 24.6 | 0.31 | 17.1 | 0.31 | 29.2 | 0.314 | 23.60 | 11.8 |
| A* | 0.40 | 25.9 | 0.32 | 29.3 | 0.35 | 25.0 | 0.34 | 18.4 | 0.37 | 34.3 | 0.356 | 26.58 | ||
| Ⅱ | BA_DQN | 0.39 | 24.8 | 0.38 | 30.7 | 0.35 | 29.3 | 0.37 | 29.3 | 0.37 | 27.7 | 0.372 | 28.36 | 17.7 |
| A* | 0.42 | 30.4 | 0.49 | 33.8 | 0.39 | 32.7 | 0.46 | 34.5 | 0.50 | 34.1 | 0.452 | 33.10 | ||
| Ⅲ | BA_DQN | 0.59 | 44.3 | 0.56 | 39.5 | 0.59 | 40.3 | 0.54 | 44.6 | 0.49 | 38.1 | 0.554 | 41.36 | 19.7 |
| A* | 0.86 | 47.0 | 0.60 | 42.1 | 0.73 | 42.8 | 0.61 | 46.1 | 0.65 | 44.4 | 0.690 | 44.48 | ||
| Ⅳ | BA_DQN | 1.39 | 103.9 | 1.33 | 109.0 | 1.38 | 95.1 | 1.50 | 98.1 | 1.43 | 97.0 | 1.406 | 100.62 | 36.0 |
| A* | 1.85 | 104.7 | 1.86 | 129.3 | 2.53 | 97.5 | 2.46 | 114.3 | 2.29 | 116.8 | 2.198 | 112.52 | ||

Fig. 12
Comparison of sailing time between BA_DQN and A* algorithm across different scenarios

| [1] | Takács Bence, Dóczi Roland, Sütő Balázs, et al. Extending AUV Response Robot Capabilities to Solve Standardized Test Methods[J]. Acta Polytechnica Hungarica, 2016, 13(1): 157-170. |
| [2] | 赵苗, 高永琪, 吴笛霄, 等. 复杂海战场环境下AUV全局路径规划方法[J]. 国防科技大学学报, 2021, 43(1): 41-48. |
| Zhao Miao, Gao Yongqi, Wu Dixiao, et al. AUV Global Path Planning Method in Complex Sea Battle Field Environment[J]. Journal of National University of Defense Technology, 2021, 43(1): 41-48. | |
| [3] | 郭银景, 侯佳辰, 吴琪, 等. AUV全局路径规划环境建模算法研究进展[J]. 舰船科学技术, 2021, 43(17): 12-18. |
| Guo Yinjing, Hou Jiachen, Wu Qi, et al. Research Progress of AUV Global Path Planning Environment Modeling Algorithm[J]. Ship Science and Technology, 2021, 43(17): 12-18. | |
| [4] | 胡春磊, 章飞, 曾庆军. 基于多目标蚁群策略的AUV全局路径规划算法[J]. 传感器与微系统, 2020, 39(11): 107-109, 113. |
| Hu Chunlei, Zhang Fei, Zeng Qingjun. Global Path Planning Algorithm for AUV Based on Multi-objective Ant Colony Strategy[J]. Transducer and Microsystem Technologies, 2020, 39(11): 107-109, 113. | |
| [5] | 李世奇, 孙兵, 朱蟋蟋. 海流环境下基于改进D∗算法的AUV动态路径规划[J]. 高技术通讯, 2022, 32(1): 84-92. |
| Li Shiqi, Sun Bing, Zhu Xixi. Autonomous Underwater Vehicles Dynamic Path Planning Based on Improved D* Algorithm in Ocean Current Environment[J]. Chinese High Technology Letters, 2022, 32(1): 84-92. | |
| [6] | 洪晔, 王宏健, 边信黔. 基于分层马尔可夫决策过程的AUV全局路径规划研究[J]. 系统仿真学报, 2008, 20(9): 2361-2363, 2367. |
| Hong Ye, Wang Hongjian, Bian Xinqian. Global Path Planning for AUV Based on Hierarchical Markov Decision Processes[J]. Journal of System Simulation, 2008, 20(9): 2361-2363, 2367. | |
| [7] | 王磊, 刘晶晶, 齐俊艳, 等. 基于改进人工势场法的AUV全局路径规划[J]. 河南理工大学学报(自然科学版), 2024, 43(1): 132-139. |
| Wang Lei, Liu Jingjing, Qi Junyan, et al. A Global Path Planning Algorithm for AUV Based on Improved Artificial Potential Field Method[J]. Journal of Henan Polytechnic University(Natural Science), 2024, 43(1): 132-139. | |
| [8] | 薛双飞. 基于改进A*算法的近海船舶路径规划[D]. 武汉: 武汉理工大学, 2018. |
| Xue Shuangfei. Route Planning of Offshore Ships Based on Improved A* Algorithm[D]. Wuhan: Wuhan University of Technology, 2018. | |
| [9] | McColgan J, McGookin E W, Mazlan A N A. A Low Fidelity Mathematical Model of a Biomimetic AUV for Multi-vehicle Cooperation[C]//OCEANS 2015 - Genova. Piscataway: IEEE, 2015: 1-10. |
| [10] | Luo Lei, Zhao Ning, Zhu Yi, et al. A* Guiding DQN Algorithm for Automated Guided Vehicle Pathfinding Problem of Robotic Mobile Fulfillment Systems[J]. Computers & Industrial Engineering, 2023, 178: 109112. |
| [11] | Yang Yang, Li Juntao, Peng Lingling. Multi-robot Path Planning Based on a Deep Reinforcement Learning DQN Algorithm[J]. CAAI Transactions on Intelligence Technology, 2020, 5(3): 177-183. |
| [12] | Zhang Yaoyu, Li Caihong, Zhang Guosheng, et al. Research on the Local Path Planning for Mobile Robots Based on PRO-dueling Deep Q-network (DQN) Algorithm[J]. International Journal of Advanced Computer Science and Applications, 2023, 14(8): 381-387. |
| [13] | 罗磊, 赵宁, 任成栋. 基于行为克隆和奖励重构的AGV路径规划算法[J/OL]. 计算机集成制造系统. (2023-10-24)[2024-03-27]. . |
| Luo Lei, Zhao Ning, Ren Chengdong. Reinforcement Learning Algorithm for AGV Path Planning Based on Behavioral Cloning and Reward Reconstruction[J/OL]. Computer Integrated Manufacturing Systems. (2023-10-24)[2024-03-27]. . | |
| [14] | 周娴玮, 包明豪, 叶鑫, 等. 带Q网络过滤的两阶段TD3深度强化学习方法[J]. 计算机技术与发展, 2023, 33(10): 101-108. |
| Zhou Xianwei, Bao Minghao, Ye Xin, et al. Two-stage TD3 Deep Reinforcement Learning Algorithm with Q Network Filtration[J]. Computer Technology and Development, 2023, 33(10): 101-108. | |
| [15] | Yang Jiachen, Ni Jingfei, Xi Meng, et al. Intelligent Path Planning of Underwater Robot Based on Reinforcement Learning[J]. IEEE Transactions on Automation Science and Engineering, 2023, 20(3): 1983-1996. |
| [16] | Yang Xiao, Han Qilong. Improved DQN for Dynamic Obstacle Avoidance and Ship Path Planning[J]. Algorithms, 2023, 16(5): 220. |
| [17] | Lou Ping, Xu Kun, Jiang Xuemei, et al. Path Planning in an Unknown Environment Based on Deep Reinforcement Learning with Prior Knowledge[J]. Journal of Intelligent & Fuzzy Systems, 2021, 41(6): 5773-5789. |
| [18] | Wenzel Pilar von Pilchau, Stein Anthony, Hähner Jörg, et al. Synthetic Experiences for Accelerating DQN Performance in Discrete Non-deterministic Environments[J]. Algorithms, 2021, 14(8): 226. |
| [19] | Zeyad Abd Algfoor, Mohd Shahrizal Sunar, Kolivand Hoshang. A Comprehensive Study on Pathfinding Techniques for Robotics and Video Games[J]. International Journal of Computer Games Technology, 2015, 2015(1): 736138. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Zhou Zicong, Zeng Junjie, Hu Yue, Zhu Zhengqiu, Yin Quanjun. Multi-agent Reinforcement Learning Method for Wargame Simulation Based on Suboptimal Demonstration Guidance [J]. Journal of System Simulation, 2026, 38(5): 1277-1289. |
| [3] | Li Guozheng, Wang Rui, Fan Shichao, Cai Xintong, Zhai Xinyue. Review on Optimization of Simulation Modeling Strategies for Spacecraft Orbit Avoidance [J]. Journal of System Simulation, 2026, 38(4): 855-868. |
| [4] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [5] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [6] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [7] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [8] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [9] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [10] | Zheng Wei, Tang Jiahao, Xiong Xiaoping, Fan Xin. Intelligent Decision-making Method in Imbalanced Air Combat Based on Asymmetric Self-play [J]. Journal of System Simulation, 2026, 38(2): 433-446. |
| [11] | Ding Zhengkun, Liu Jiaqi, Xu Junzheng, Xu Yuezhu, Wang Xingmei. Intelligent Air Combat Decision-making Method Based on BiGRU and Priority Dynamic Sampling [J]. Journal of System Simulation, 2026, 38(2): 447-459. |
| [12] | Tao Caixia, Chen Naikun, Gao Fengyang, Zhang Jiangang. Distributed Optimization for Integrated Energy Based on Multi-agent Reinforcement Learning [J]. Journal of System Simulation, 2026, 38(2): 476-487. |
| [13] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [14] | Jiang Ming, He Tao. Solving the Vehicle Routing Problem Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(9): 2177-2187. |
| [15] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
