

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (4): 953-967.doi: 10.16182/j.issn1004731x.joss.23-1455
• Papers • Previous Articles Next Articles
He Zhigang, Li Dayan, Wang Niya, Mao Jianlin, Wang Ning
Received:2023-11-30
Revised:2023-12-22
Online:2025-04-17
Published:2025-04-16
Contact:
Li Dayan
CLC Number:
He Zhigang, Li Dayan, Wang Niya, Mao Jianlin, Wang Ning. A Multi-robot Collaborative Path Planning Algorithm with Chain Working Mode[J]. Journal of System Simulation, 2025, 37(4): 953-967.

Fig. 1
Path planning
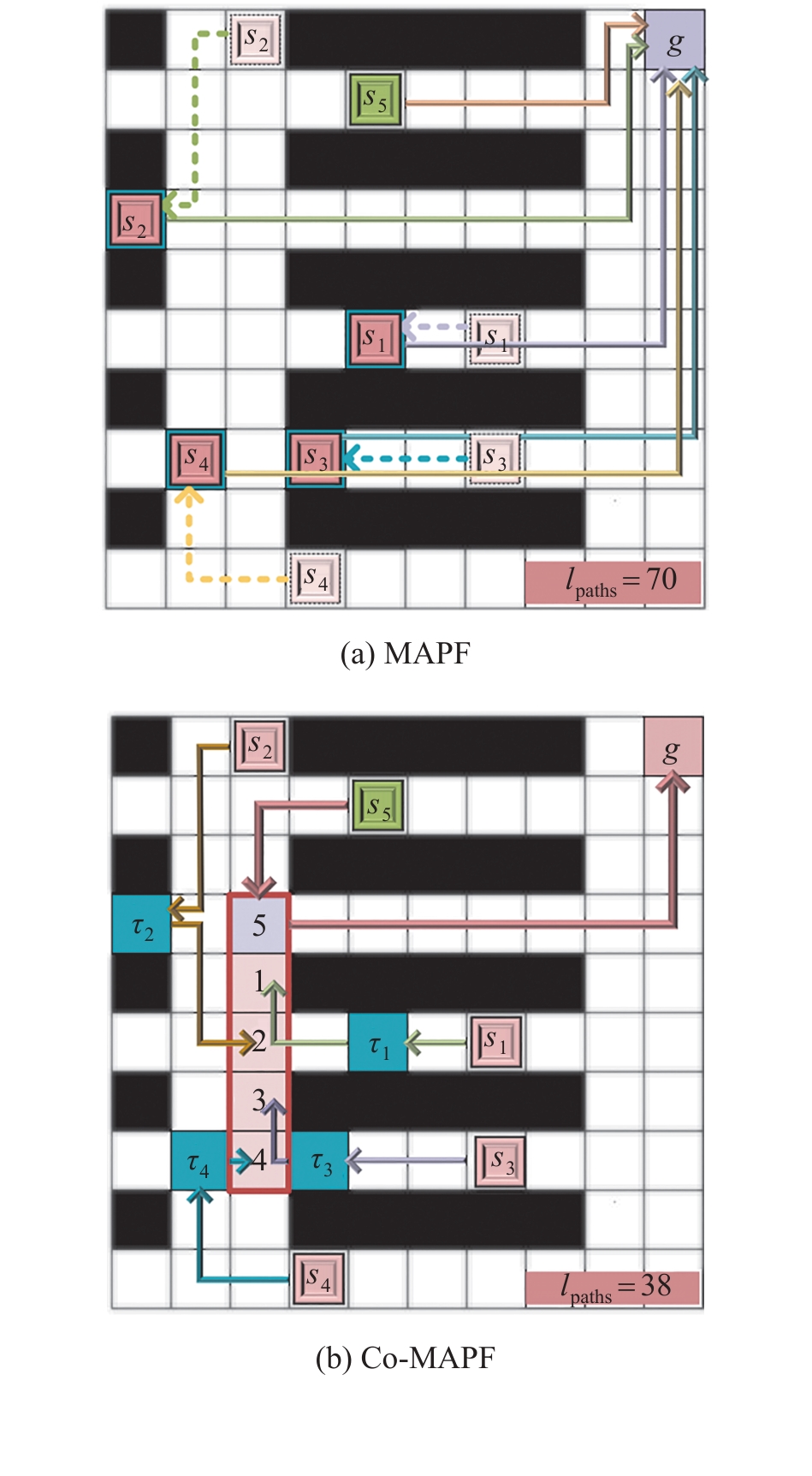

Fig. 2
Schematic diagram of traction position points and their iterative optimization
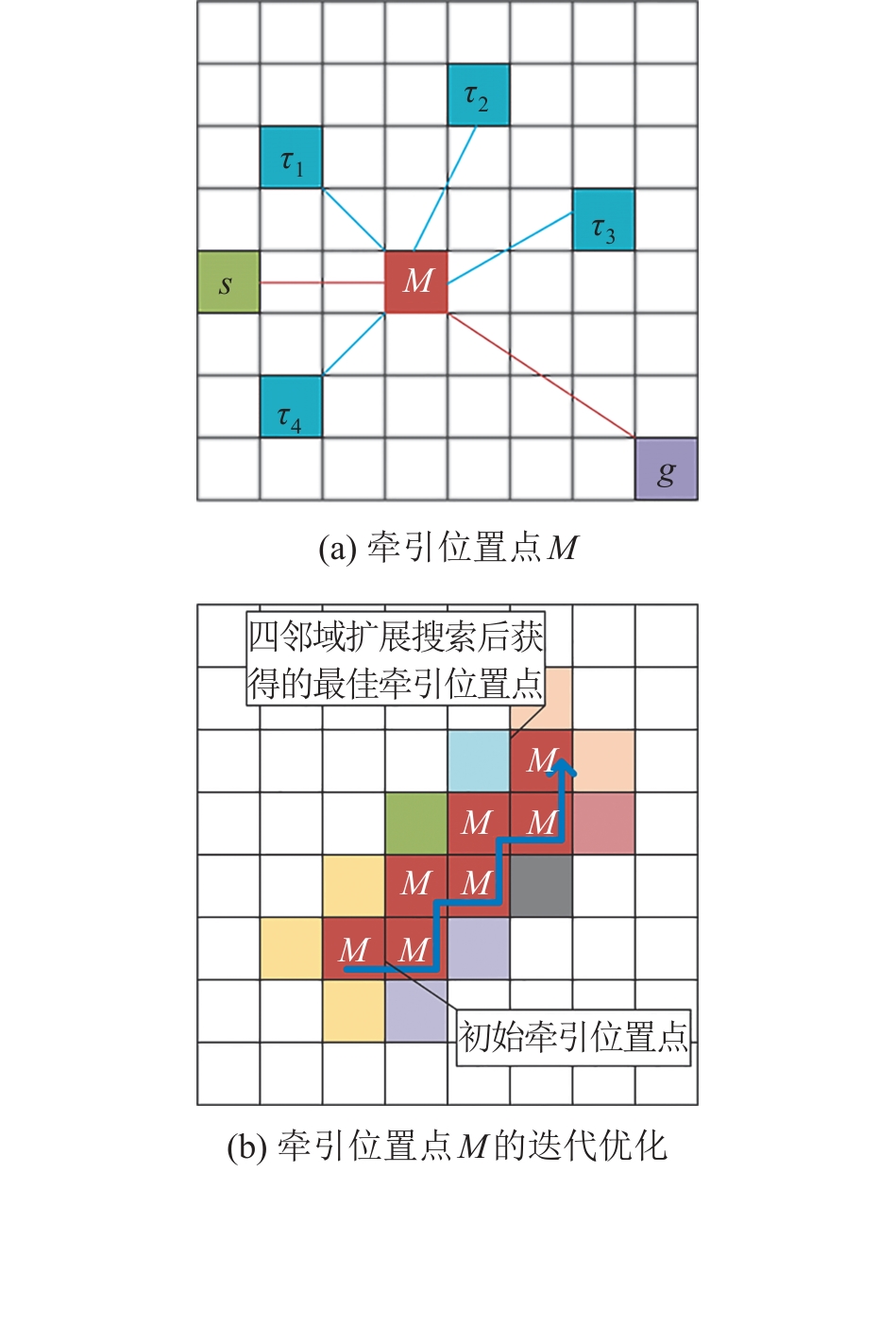
Fig. 3
Determination of the connection area of collaborative robots
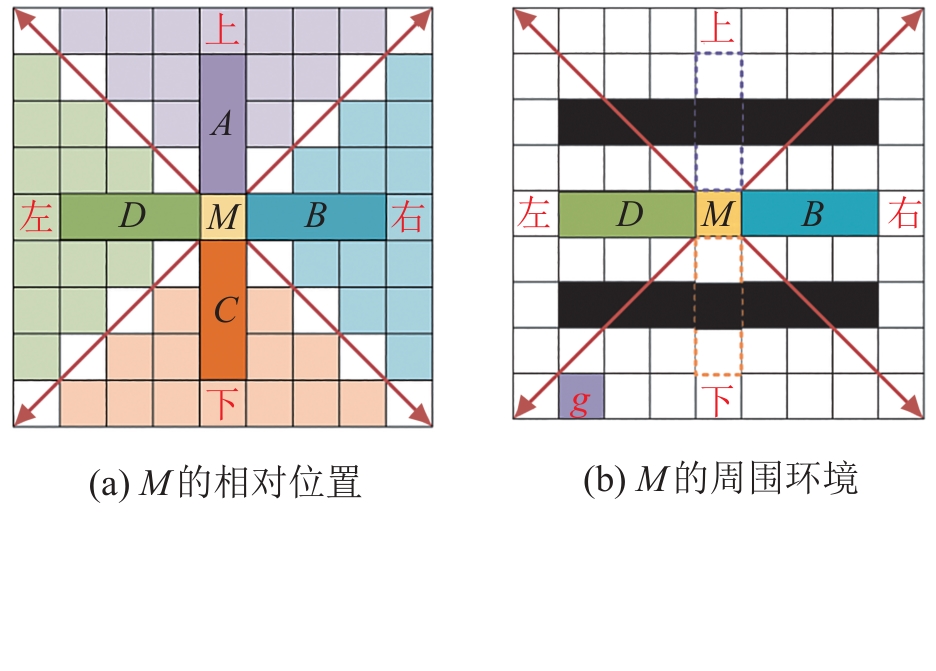

Fig. 4
Allocation of final target point for acquisition robot
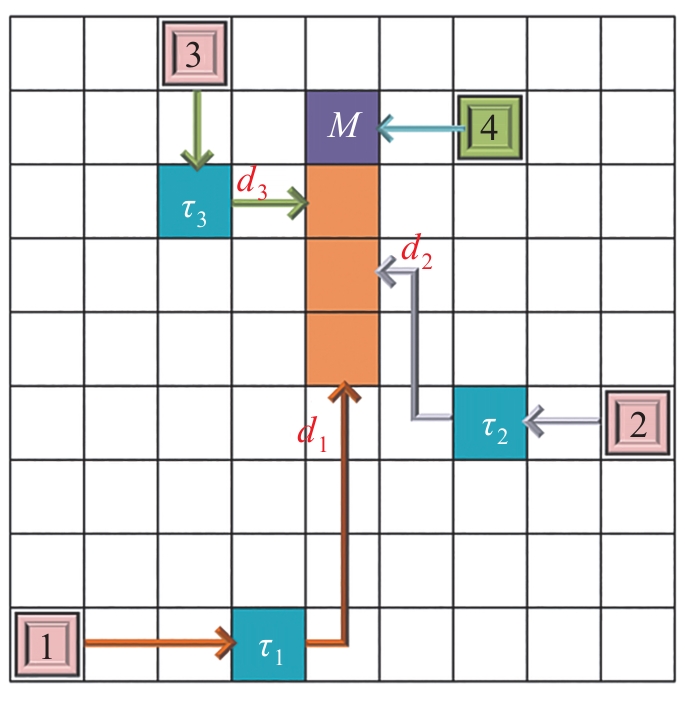
Fig. 5
Multi robot path planning after serial connection of collaborative robots
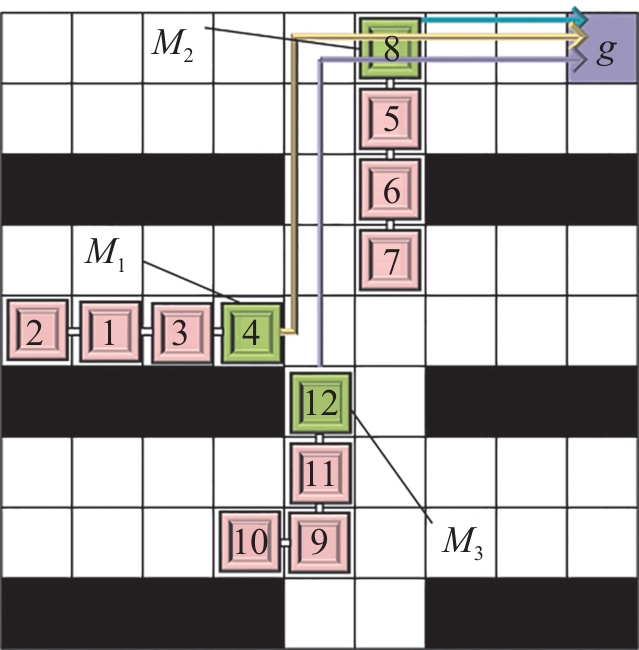

Fig. 6
Dynamic adjustment strategy for priority and serial area
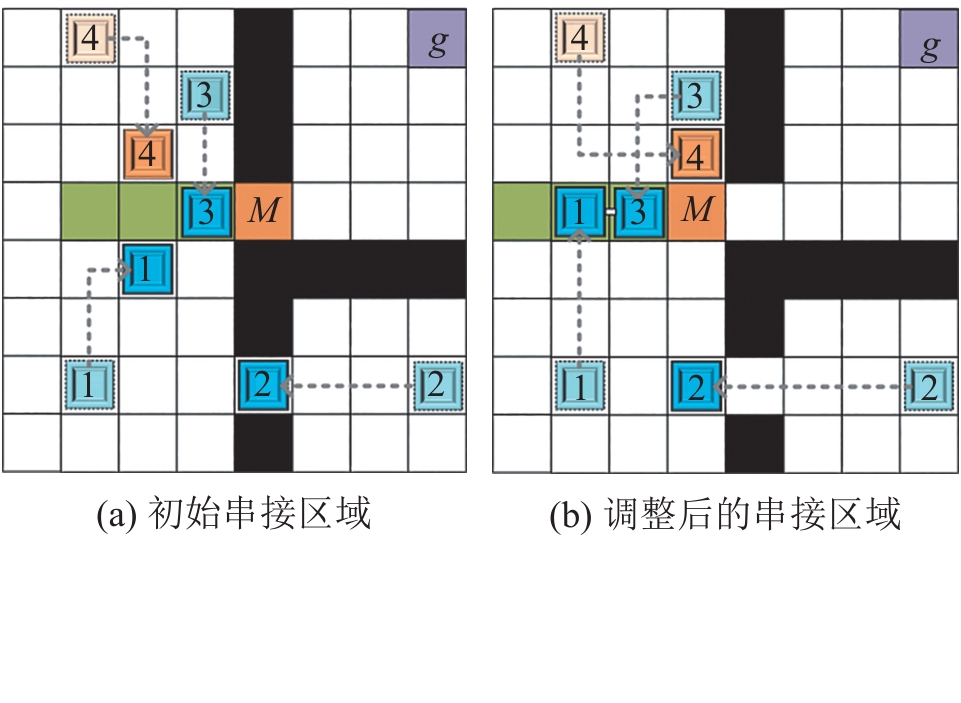
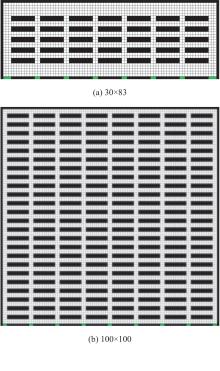
Fig. 7
Warehouse maps of different sizes

Table 1
Comparison of path solution quality obtained by Wd-SIPP and Co-DPtSIPP algorithms on 30×83 warehouse map
| 机器人数量 | 最大完工时间 | 路径总代价 | 路径总长度 | 运行时间/s | |||||
|---|---|---|---|---|---|---|---|---|---|
| Wd-SIPP | Co-DPtSIPP | Wd-SIPP | Co-DPtSIPP | Wd-SIPP | Co-DPtSIPP | Wd-SIPP | Co-DPtSIPP | ||
| 3 | 3 | 126.5 | 143.8 | 812.5 | 737.6 | 642.2 | 553.6 | 0.39 | 1.4 |
| 6 | 154.9 | 170.7 | 1 770 | 1 591.3 | 1 381 | 1 208.3 | 0.99 | 4.81 | |
| 9 | 149.1 | 169.8 | 2 556.8 | 2 307.5 | 1 993.4 | 1 707.4 | 1.6 | 7.7 | |
| 12 | 148.7 | 172.2 | 3 361.8 | 3 042.9 | 2 630.6 | 2 282.7 | 2.28 | 10.97 | |
| 15 | 157.7 | 190.0 | 4 503.2 | 4 058.6 | 3 448.3 | 3 020.4 | 3.99 | 25.03 | |
| 5 | 2 | 135.4 | 160.8 | 928.0 | 844.5 | 769.0 | 668.1 | 0.44 | 2.27 |
| 4 | 149.8 | 176.8 | 1 894.2 | 1 723.1 | 1 554.0 | 1 384.2 | 0.99 | 5.24 | |
| 6 | 150.2 | 174.2 | 2 849.73 | 2 331.3 | 2 271.0 | 2 001.5 | 1.79 | 8.61 | |
| 8 | 167.0 | 195.4 | 3 906.7 | 3 514.6 | 3 131.9 | 2 808.4 | 3.05 | 26.4 | |
| 10 | 159.2 | 197.4 | 5 004.2 | 4 497.8 | 3 948.2 | 3 549.3 | 4.65 | 21.11 | |
Table 2
Comparison of path solution quality between Wd-SIPP and Co-DPtSIPP algorithms on 100 ×100 warehouse map
| 机器人数量 | 最大完工时间 | 路径总代价 | 路径总长度 | 运行时间/s | |||||
|---|---|---|---|---|---|---|---|---|---|
| Wd-SIPP | Co-DPtSIPP | Wd-SIPP | Co-DPtSIPP | Wd-SIPP | Co-DPtSIPP | Wd-SIPP | Co-DPtSIPP | ||
| 3 | 3 | 204.4 | 225.8 | 1 279.7 | 1 203.6 | 985.8 | 894.1 | 1.08 | 2.81 |
| 6 | 230.4 | 236.1 | 2 622.8 | 2 377.8 | 1 995.2 | 1 765.1 | 2.12 | 7.89 | |
| 9 | 235.2 | 255.6 | 3 835.6 | 3 543.6 | 3 009.7 | 2 721.4 | 3.36 | 16.22 | |
| 12 | 251.9 | 265.6 | 5 454.8 | 4 971.9 | 4 239.4 | 3 764.3 | 5.61 | 26.19 | |
| 15 | 252.3 | 281.3 | 6 677.8 | 6 318.0 | 5 214.8 | 4 708.0 | 6.15 | 52.48 | |
| 5 | 2 | 206.8 | 235.9 | 1 463.7 | 1 328.5 | 1 210.5 | 1 080.9 | 1.36 | 6.16 |
| 4 | 219.8 | 240.2 | 2 897.1 | 2 485.2 | 2 343.6 | 2 050.6 | 3.35 | 12.31 | |
| 6 | 241.1 | 264.5 | 4 592.6 | 4 104.7 | 3 725.7 | 3 357.7 | 6.57 | 21.4 | |
| 8 | 242.5 | 271.9 | 6 237.5 | 5 477.5 | 5 065.6 | 4 422.0 | 11.25 | 28.15 | |
| 10 | 256.0 | 286.7 | 8 134.4 | 7 113.3 | 6 408.1 | 5 693.8 | 16.67 | 40.48 | |

Fig. 8
Comparison of success rates of different algorithms on 30×83 warehouse map
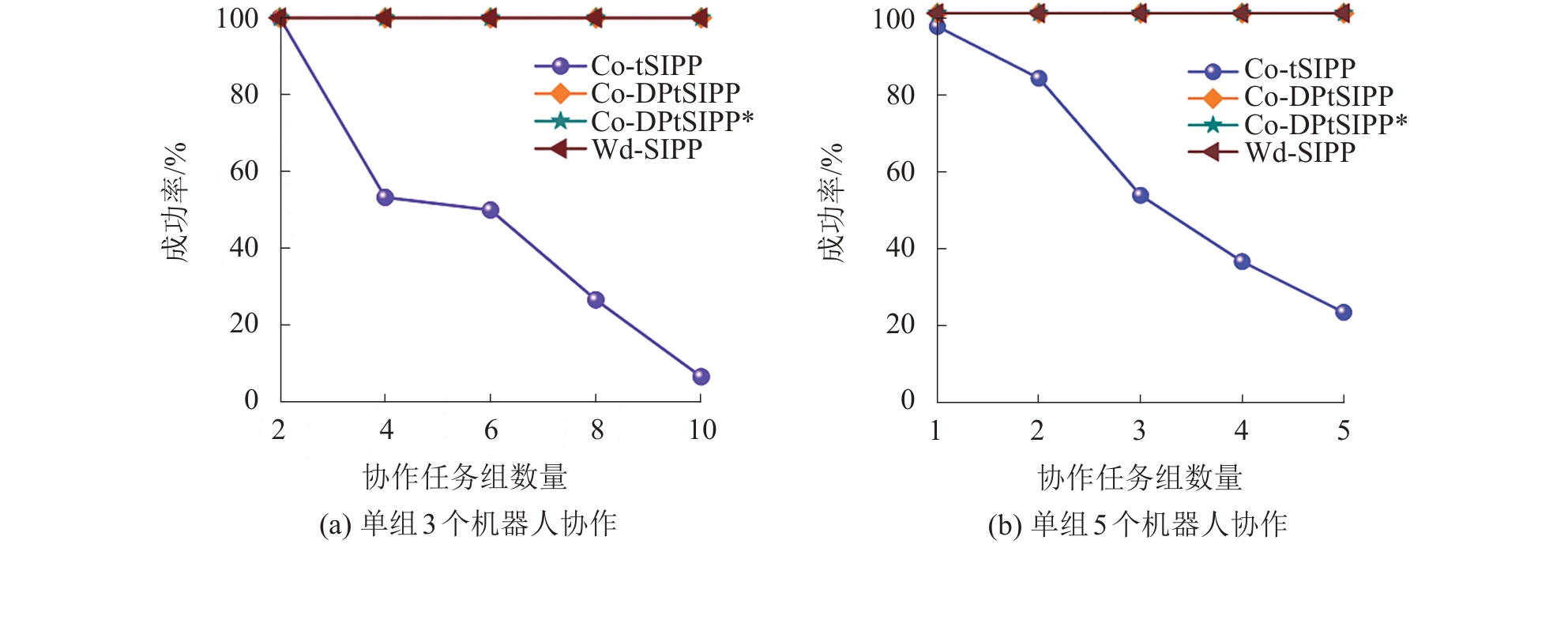

Fig. 9
Comparison of success rates of different algorithms on 100×100 warehouse map
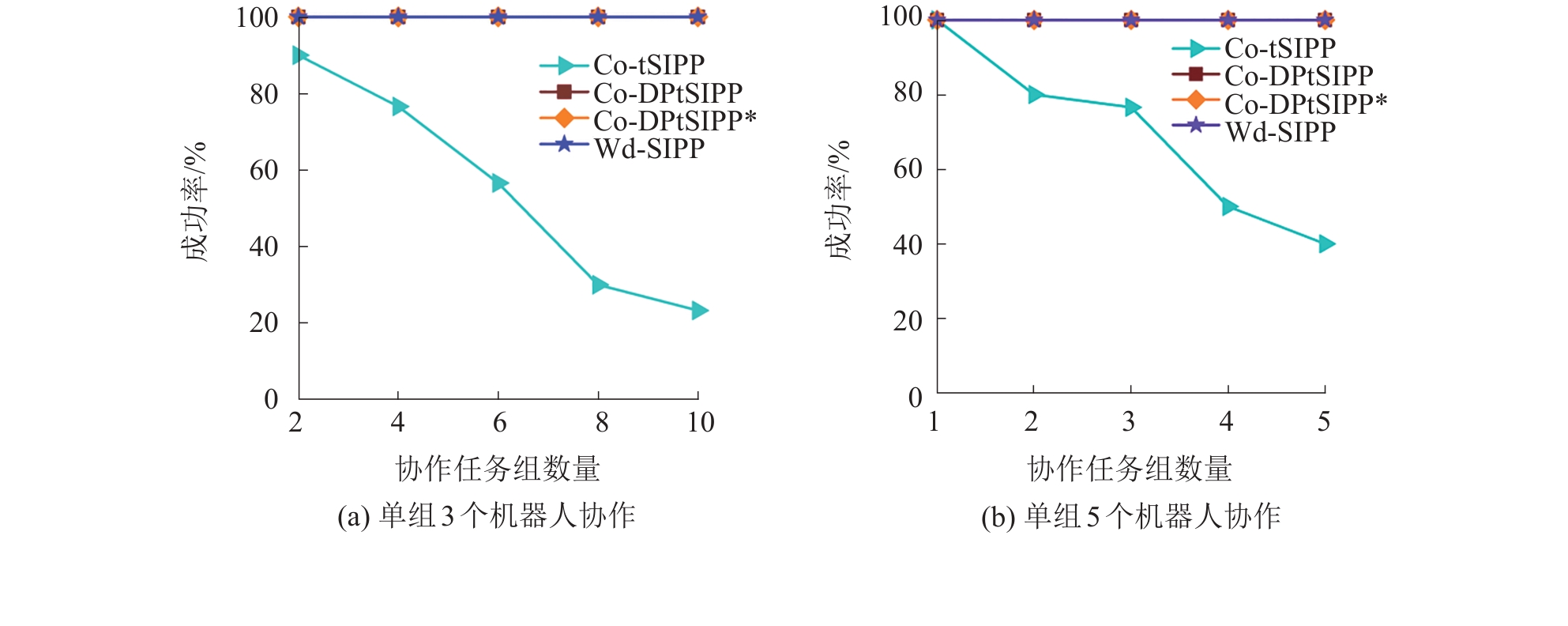
Table 3
Comparison of path solution quality obtained by Co-DPtSIPP and Co-DPtSIPP* algorithms on 30×83 warehouse map
| 机器人数量 | 最大完工时间 | 路径总代价 | 路径总长度 | 运行时间/s | |||||
|---|---|---|---|---|---|---|---|---|---|
| Co-DPtSIPP | Co-DPtSIPP* | Co-DPtSIPP | Co-DPtSIPP* | Co-DPtSIPP | Co-DPtSIPP* | Co-DPtSIPP | Co-DPtSIPP* | ||
| 3 | 3 | 143.8 | 140.2 | 737.6 | 711.5 | 553.6 | 544.2 | 1.40 | 3.23 |
| 6 | 170.7 | 171.1 | 1 591.3 | 1 564.0 | 1 208.3 | 1 166.0 | 4.81 | 9.01 | |
| 9 | 169.8 | 163.9 | 2 307.5 | 2 248.5 | 1 707.4 | 1 641.9 | 7.70 | 18.13 | |
| 12 | 172.2 | 165.0 | 3 042.9 | 2 951.1 | 2 282.7 | 2 195.6 | 10.97 | 36.60 | |
| 15 | 191.2 | 178.1 | 4 072.3 | 3 927.6 | 3 027.9 | 2 849.6 | 24.46 | 51.42 | |
| 5 | 2 | 160.8 | 161.2 | 844.5 | 834.8 | 668.1 | 661.0 | 2.27 | 3.70 |
| 4 | 176.8 | 175.1 | 1 723.1 | 1 694.4 | 1 384.2 | 1 366.0 | 5.24 | 9.34 | |
| 6 | 174.2 | 173.0 | 2 331.3 | 2 416.8 | 2 001.5 | 1 949.9 | 8.61 | 25.34 | |
| 8 | 195.4 | 193.6 | 3 514.6 | 3 469.8 | 2 808.4 | 2 715.8 | 26.40 | 49.91 | |
| 10 | 196.7 | 191.4 | 4 497.1 | 4 391.0 | 3 534.8 | 3 438.4 | 20.41 | 79.20 | |
Table 4
Comparison of path solution quality obtained by Co-DPtSIPP and Co-DPtSIPP* algorithms on 100×100 warehouse map
| 机器人数量 | 最大完工时间 | 路径总代价 | 路径总长度 | 运行时间/s | |||||
|---|---|---|---|---|---|---|---|---|---|
| Co-DPtSIPP | Co-DPtSIPP* | Co-DPtSIPP | Co-DPtSIPP* | Co-DPtSIPP | Co-DPtSIPP* | Co-DPtSIPP | Co-DPtSIPP* | ||
| 3 | 3 | 224.2 | 224.5 | 1 199.0 | 1 191.5 | 890.7 | 885.6 | 2.77 | 6.64 |
| 6 | 234.7 | 236.8 | 2 379.1 | 2 370.5 | 1 768.1 | 1 745.1 | 7.96 | 15.93 | |
| 9 | 254.2 | 252.7 | 3 512.1 | 3 506.6 | 2 700.0 | 2 641.5 | 15.87 | 29.14 | |
| 12 | 265.6 | 264.0 | 4 971.9 | 4 908.4 | 3 764.3 | 3 664.7 | 26.19 | 55.08 | |
| 15 | 281.3 | 270.4 | 6 318.0 | 6 081.5 | 4 708.0 | 4 467.6 | 52.48 | 64.56 | |
| 5 | 2 | 235.9 | 236.1 | 1 328.5 | 1 329.1 | 1 080.9 | 1 075.5 | 6.16 | 5.62 |
| 4 | 240.2 | 236.7 | 2 485.2 | 2 492.4 | 2 050.6 | 2 040.2 | 12.31 | 17.17 | |
| 6 | 271.1 | 266.7 | 4 122.6 | 4 096.8 | 3 379.1 | 3 337.3 | 22.23 | 34.2 | |
| 8 | 271.5 | 274.9 | 5 493.1 | 5 476.9 | 4 432.4 | 4 367.1 | 28.99 | 58.94 | |
| 10 | 286.2 | 287.7 | 7 137.3 | 7 007.7 | 5 711.8 | 5 577.6 | 40.41 | 95.37 | |
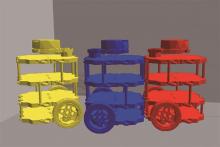
Fig. 10
Turtlebot3 simulation robot models

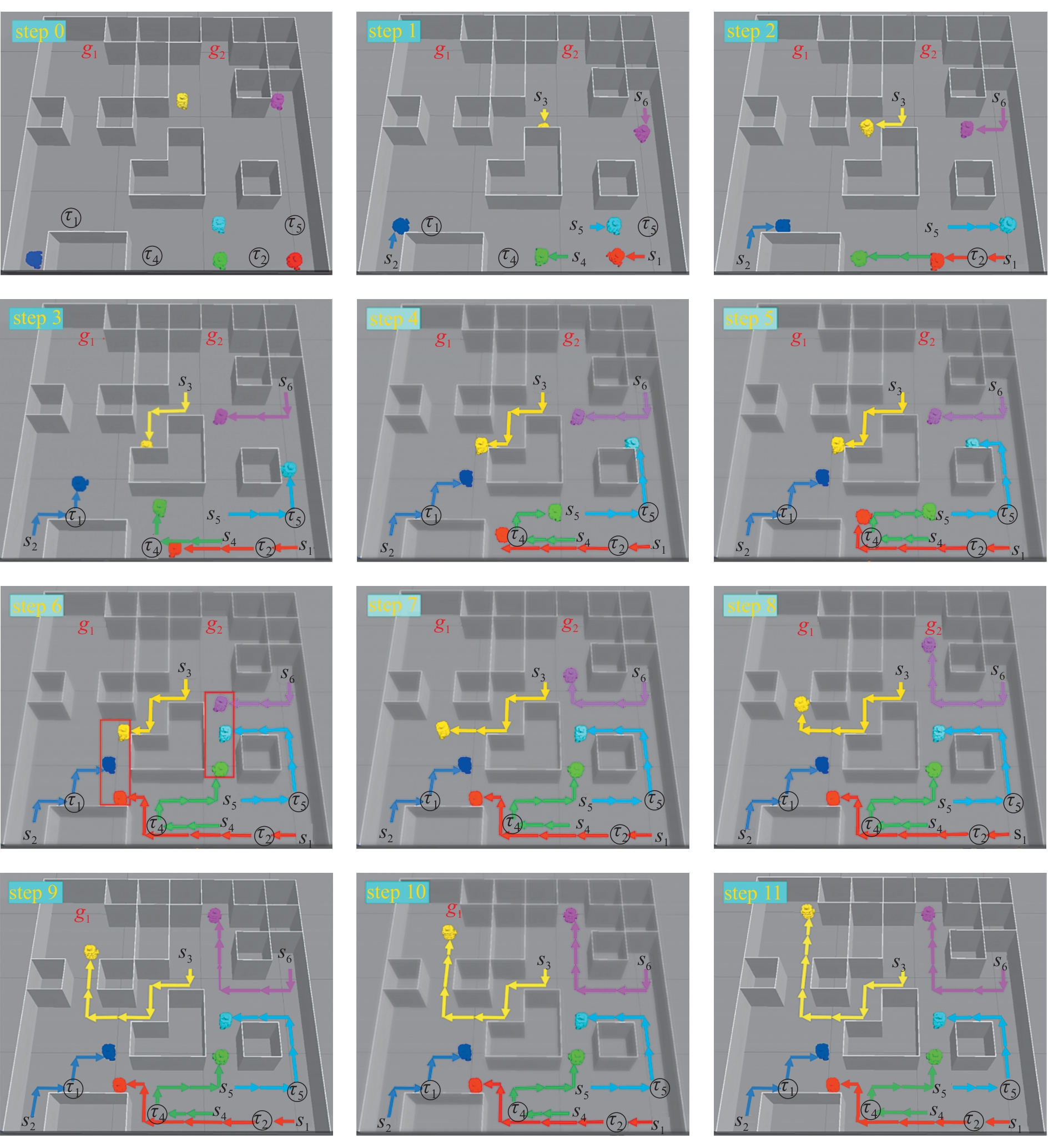
Fig. 11
ROS simulation results
| 1 | Stern Roni, Sturtevant N, Felner Ariel, et al. Multi-agent Pathfinding: Definitions, Variants, and Benchmarks[C]//Proceedings of the Twelfth International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2019: 151-158. |
| 2 | Sun Yifei, Zhang Zikai, Li Yidong, et al. Joint Optimization of Path Planning and Task Assignment for Space Robot[C]//2021 12th International Symposium on Parallel Architectures, Algorithms and Programming (PAAP). Piscataway: IEEE, 2021: 47-51. |
| 3 | 毛建旭, 贺振宇, 王耀南, 等. 电力巡检机器人路径规划技术及应用综述[J]. 控制与决策, 2023, 38(11): 3009-3024. |
| Mao Jianxu, He Zhenyu, Wang Yaonan, et al. Review of Research and Applications on Path Planning Technology for Power Inspection Robots[J]. Control and Decision, 2023, 38(11): 3009-3024. | |
| 4 | Kumar V, Sahin F. Cognitive Maps in Swarm Robots for the Mine Detection Application[C]//SMC'03 Conference Proceedings. 2003 IEEE International Conference on Systems, Man and Cybernetics. Conference Theme - System Security and Assurance. Piscataway: IEEE, 2003: 3364-3369. |
| 5 | Dai Loulei, Wang Hongguo, Pan Quanke. An Effective Multi-objective Evolutionary Algorithm Based on Decomposition for a Robot Rescue Path Planning Problem[C]//2022 41st Chinese Control Conference (CCC). Piscataway: IEEE, 2022: 2065-2070. |
| 6 | Wang Chen, Mao Jian. Summary of AGV Path Planning[C]//2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE). Piscataway: IEEE, 2019: 332-335. |
| 7 | Ma Hang, Hönig Wolfgang, Kumar T K S, et al. Lifelong Path Planning with Kinematic Constraints for Multi-agent Pickup and Delivery[C]//Proceedings of the Thirty-Third AAAI Conference on Artificial Intelligence and Thirty-First Innovative Applications of Artificial Intelligence Conference and Ninth AAAI Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2019: 7651-7658. |
| 8 | Zhang Jing, He You, Peng Yingning, et al. Cooperative Path Planning for Adversarial Target Based on Neural Network and Artificial Potential Field[C]//2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC). Piscataway: IEEE, 2018: 1-5. |
| 9 | Lu Yafei, Wu Anping, Chen Qingyang, et al. An Improved UAV Path Planning Method Based on RRT-APF Hybrid Strategy[C]//2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE). Piscataway: IEEE, 2020: 81-86. |
| 10 | Zhao Dewei, Zhang Sheng, Shao Faming, et al. Path Planning for the Rapid Reconfiguration of a Multi-robot Formation Using an Integrated Algorithm[J]. Electronics, 2023, 12(16): 3483. |
| 11 | Tai Lei, Paolo Giuseppe, Liu Ming. Virtual-to-real Deep Reinforcement Learning: Continuous Control of Mobile Robots for Mapless Navigation[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2017: 31-36. |
| 12 | 张凯翔, 毛剑琳, 向凤红, 等. 基于讨价还价博弈机制的B-IHCA*多机器人路径规划算法[J]. 自动化学报, 2023, 49(7): 1483-1497. |
| Zhang Kaixiang, Mao Jianlin, Xiang Fenghong, et al. B-IHCA*, a Bargaining Game Based Multi-agent Path Finding Algorithm[J]. Acta Automatica Sinica, 2023, 49(7): 1483-1497. | |
| 13 | 宣志玮, 毛剑琳, 张凯翔. CBS框架下面向复杂地图的低拓展度A*算法[J]. 电子学报, 2022, 50(8): 1943-1950. |
| Xuan Zhiwei, Mao Jianlin, Zhang Kaixiang. Low-expansion A* Algorithm Based on CBS Framework for Complex Map[J]. Acta Electronica Sinica, 2022, 50(8): 1943-1950. | |
| 14 | Sharon Guni, Stern Roni, Felner Ariel, et al. Conflict-based Search for Optimal Multi-agent Pathfinding[J]. Artificial Intelligence, 2015, 219: 40-66. |
| 15 | Phillips M, Likhachev M. SIPP: Safe Interval Path Planning for Dynamic Environments[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 5628-5635. |
| 16 | Carlos Hernández Ulloa, Yeoh W, Baier Jorge A, et al. A Simple and Fast Bi-objective Search Algorithm[C]//Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 143-151. |
| 17 | Okumura Keisuke, Tixeuil Sébastien. Fault-tolerant Offline Multi-agent Path Planning[C]//Proceedings of the Thirty-Seventh AAAI Conference on Artificial Intelligence and Thirty-Fifth Conference on Innovative Applications of Artificial Intelligence and Thirteenth Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2023: 11647-11654. |
| 18 | Atzmon Dor, Stern Roni, Felner Ariel, et al. Robust Multi-agent Path Finding[C]//Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems. Palo Alto: AAAI Press, 2018: 1862-1864. |
| 19 | Yakovlev Konstantin, Andreychuk Anton, Stern Roni. Revisiting Bounded-suboptimal Safe Interval Path Planning[C]//Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 300-304. |
| 20 | Silver D. Cooperative Pathfinding[C]//Proceedings of the First Artificial Intelligence and Interactive Digital Entertainment Conference. Palo Alto: AAAI Press, 2021: 117-122. |
| 21 | Mandow Lawrence, José Luis Pérez De La Cruz. Multiobjective A* Search with Consistent Heuristics[J]. Journal of the ACM, 2008, 57(5): 27. |
| 22 | Khorshid M, Holte R, Sturtevant N. A Polynomial-time Algorithm for Non-optimal Multi-agent Pathfinding[C]//Proceedings of the Fourth Annual Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2011: 76-83. |
| 23 | Greshler Nir, Gordon Ofir, Salzman Oren, et al. Cooperative Multi-agent Path Finding: Beyond Path Planning and Collision Avoidance[C]//2021 International Symposium on Multi-Robot and Multi-Agent Systems (MRS). Piscataway: IEEE, 2021: 20-28. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
