

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (3): 595-606.doi: 10.16182/j.issn1004731x.joss.24-0088
• Papers • Previous Articles Next Articles
Wang He1,2, Xu Jianing1, Yan Guangyu1,2
Received:2024-01-22
Revised:2024-03-07
Online:2025-03-17
Published:2025-03-21
Contact:
Yan Guangyu
CLC Number:
Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2025, 37(3): 595-606.

Fig. 1
System overall architecture
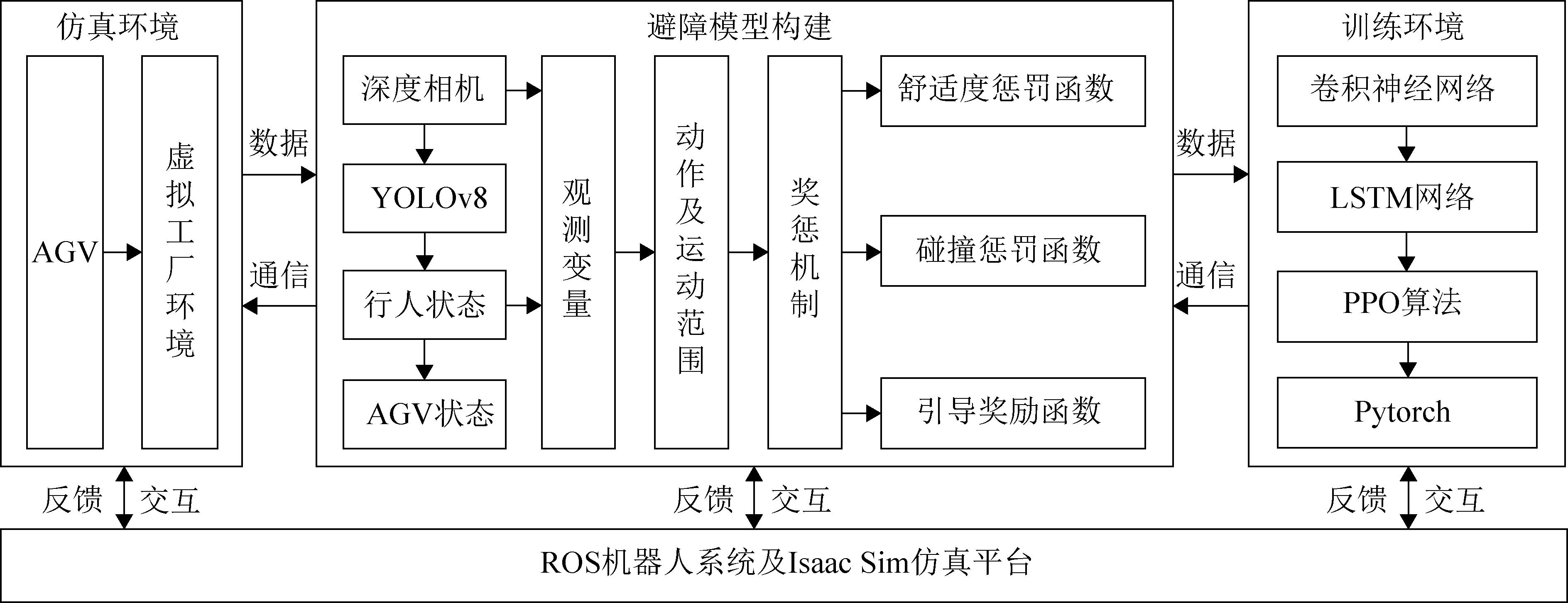

Fig. 2
Network architecture
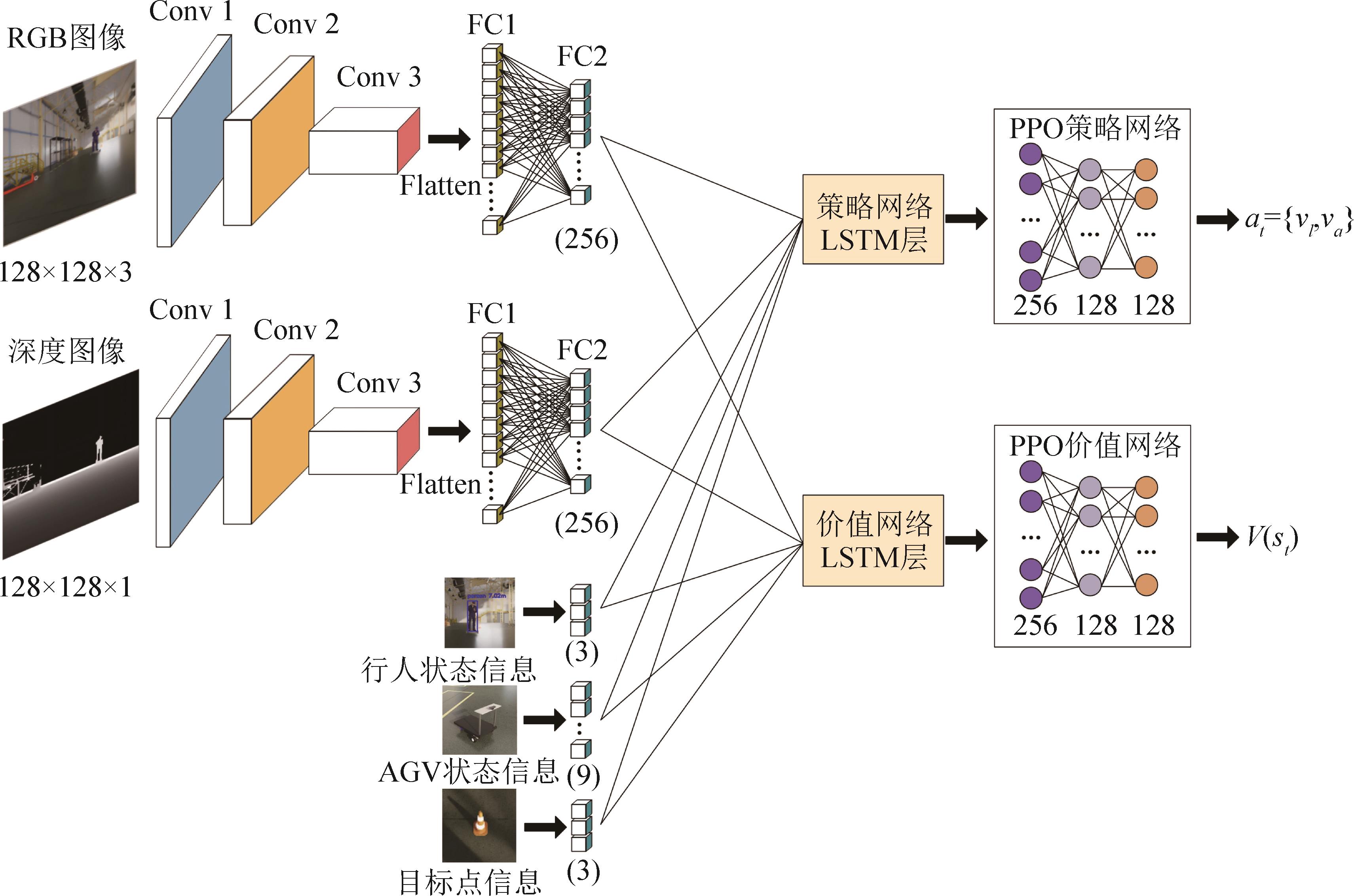
Table 1
Action space collection list
| 控制方式 | 动作描述 | 取值范围 |
|---|---|---|
| 线速度 | ||
| 角速度 |
Table 2
Personal space distance list
| 距离区域 | 距离范围/m | 区域描述 |
|---|---|---|
| 亲密距离 | 身体接触或私人互动 | |
| 私人距离 | 亲朋互动或高度有组织的活动 | |
| 社交距离 | 正式场合或公共场所的互动 | |
| 公共距离 | 没有互动或单向互动 |
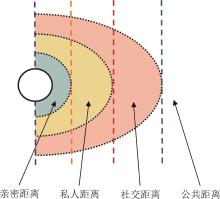
Fig. 3
Spatial distance zones for one-dimensional interaction
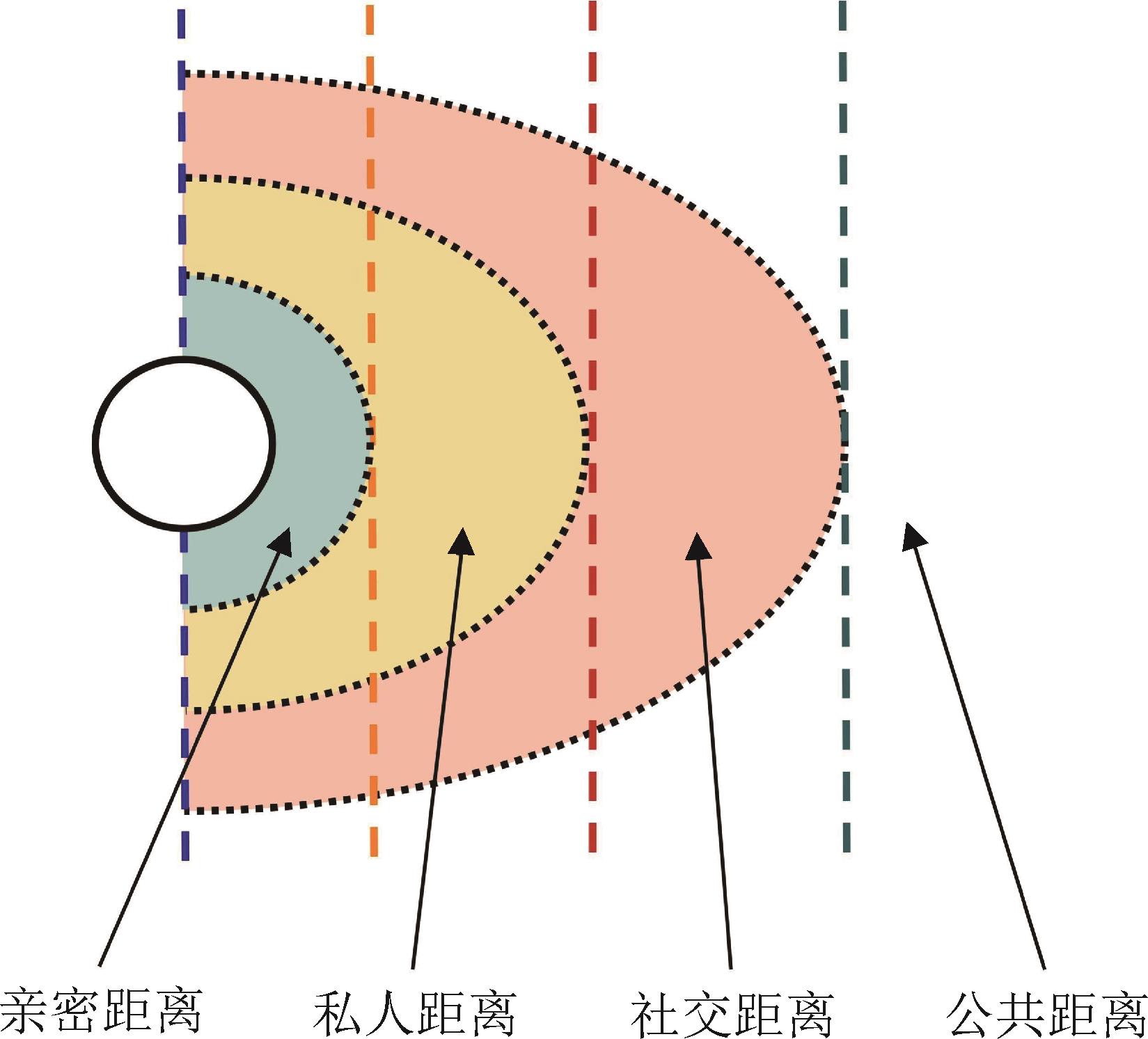
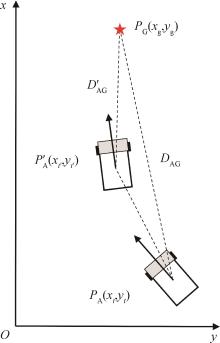
Fig. 4
AGV kinematic model
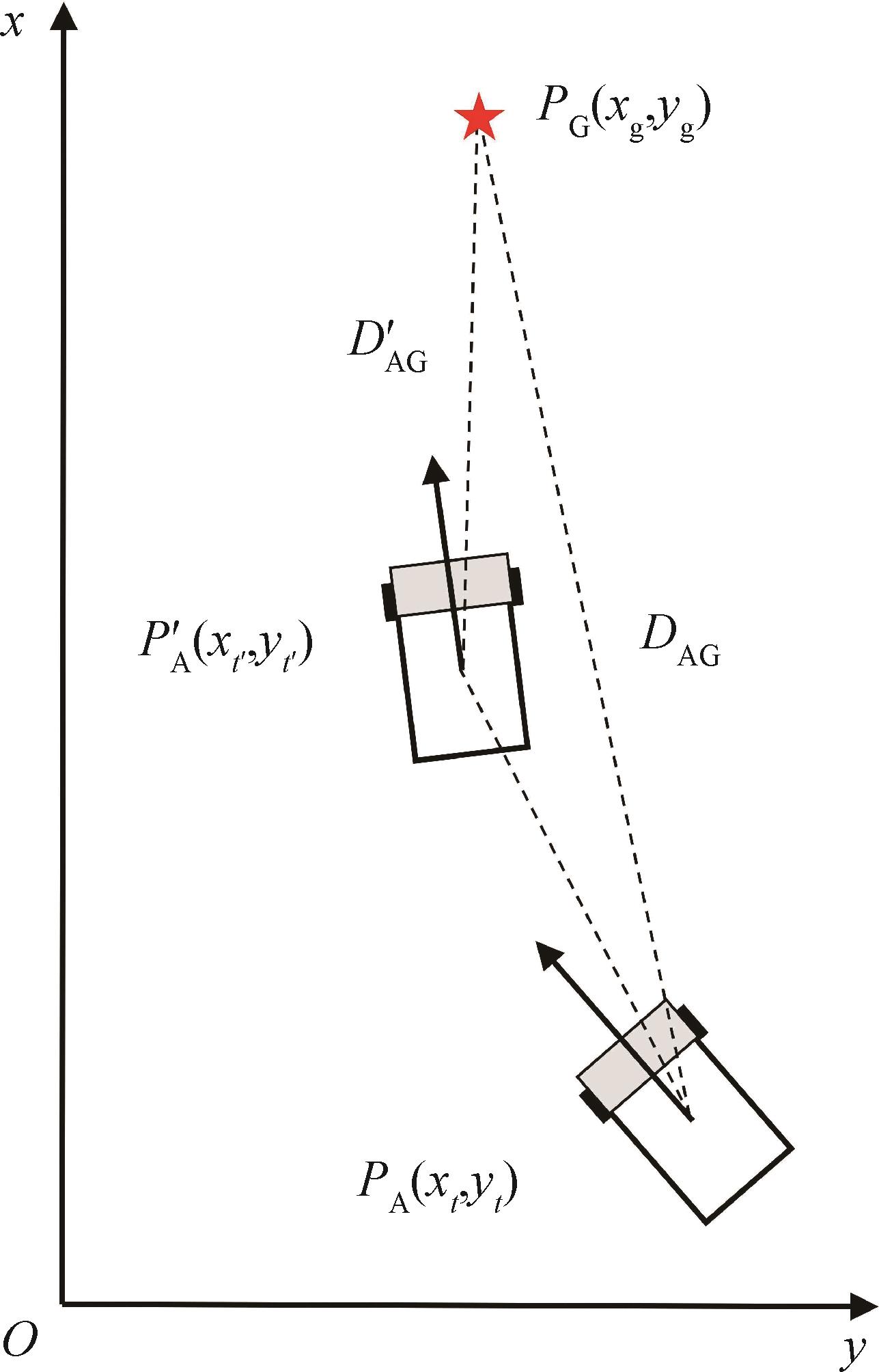
Table 3
hyperparameter settings list
| 超参数 | 设置 |
|---|---|
| batch_size | 256 |
| 经验缓存池容量 | 2 560 |
| 折扣系数 | 0.99 |
| 裁剪系数 | 0.2 |
| 学习率 | |
| 优化器 | Adam |
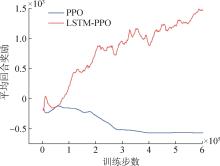
Fig. 5
Pre-trained mean episode reward
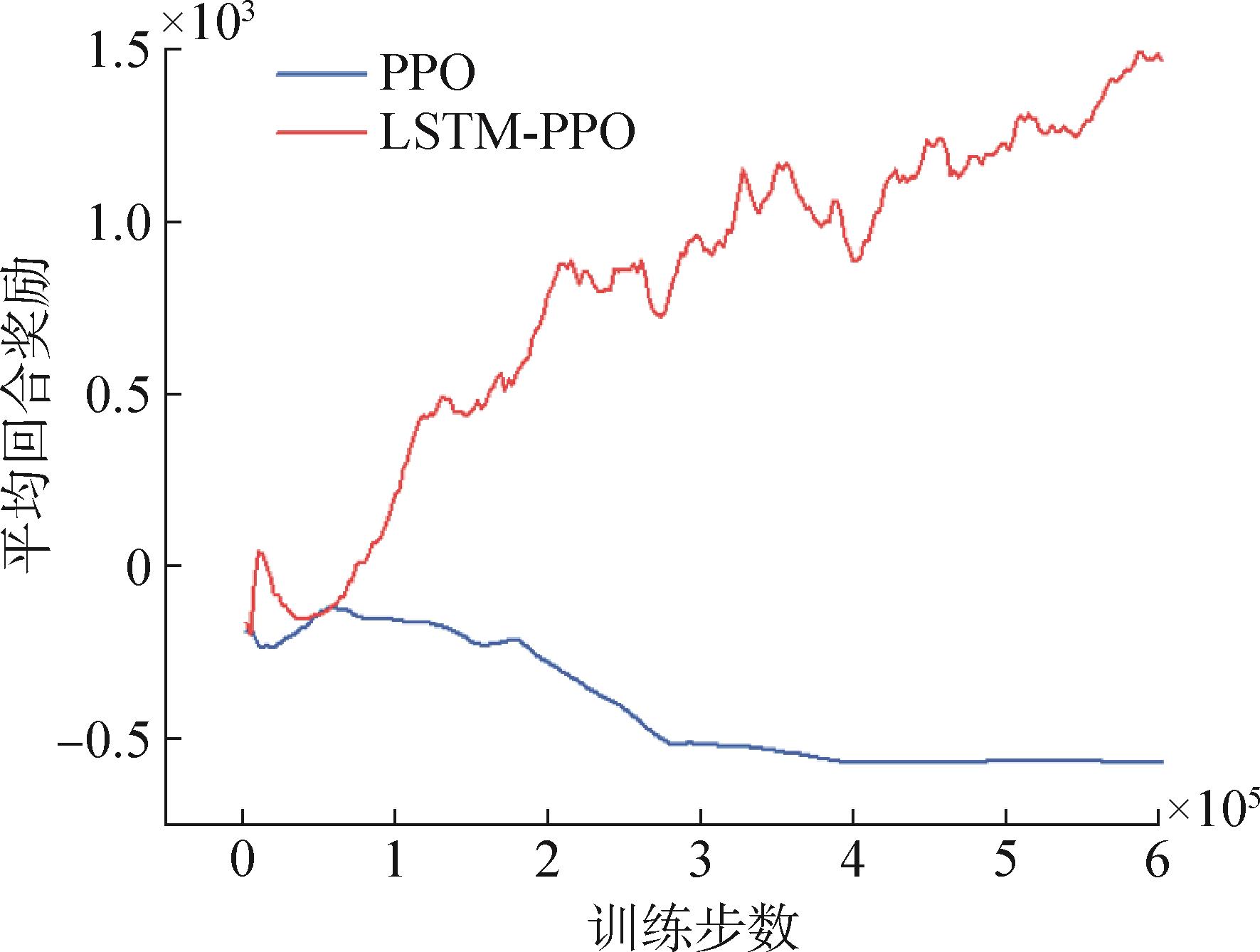
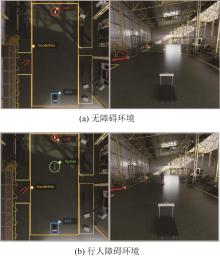
Fig. 6
Train environment
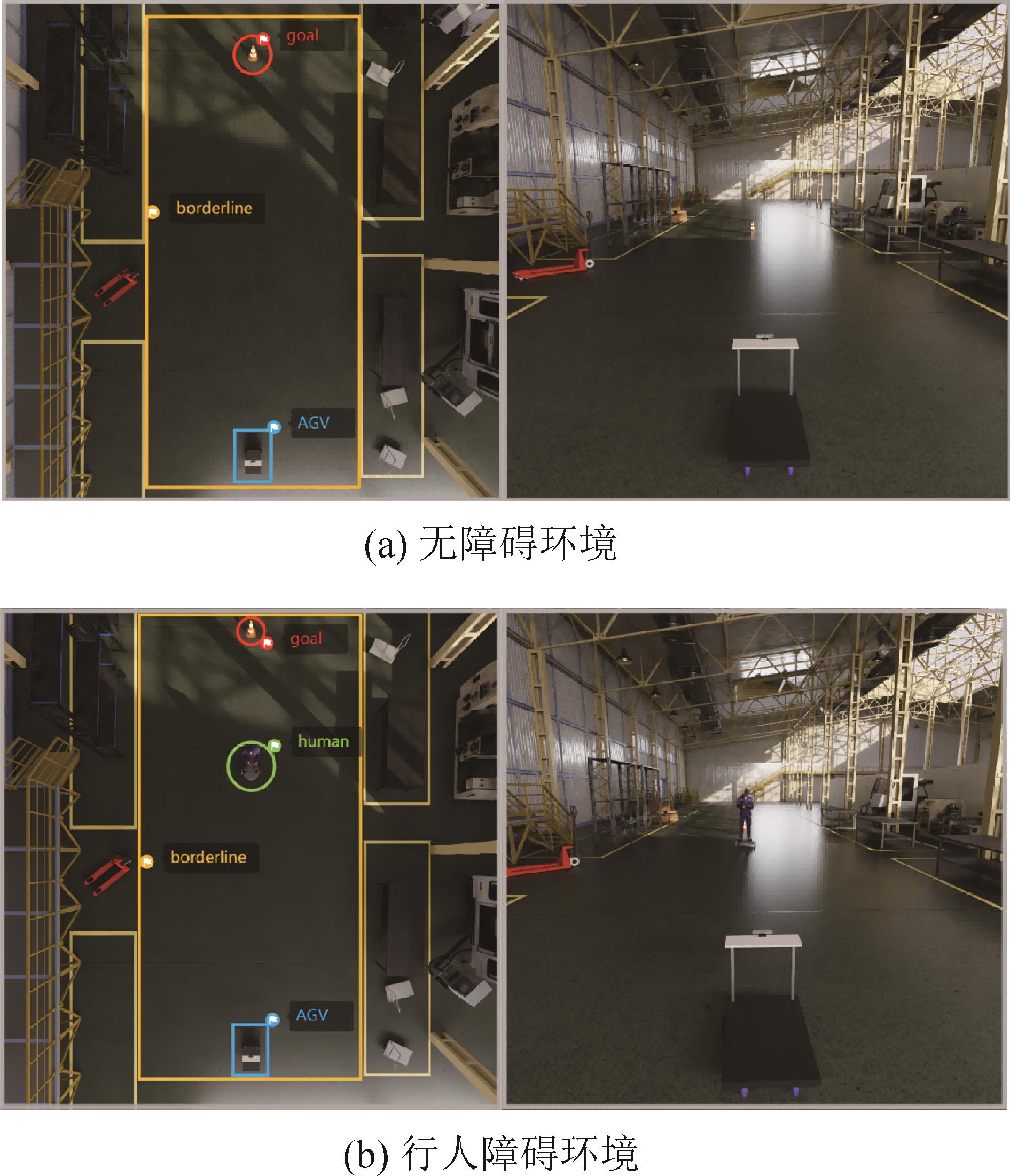
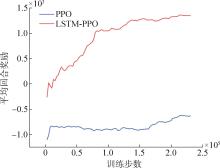
Fig. 7
Formal training mean episode reward

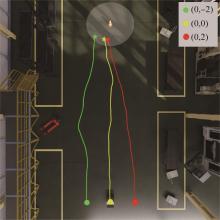
Fig. 8
Obstacle-free navigation testing results
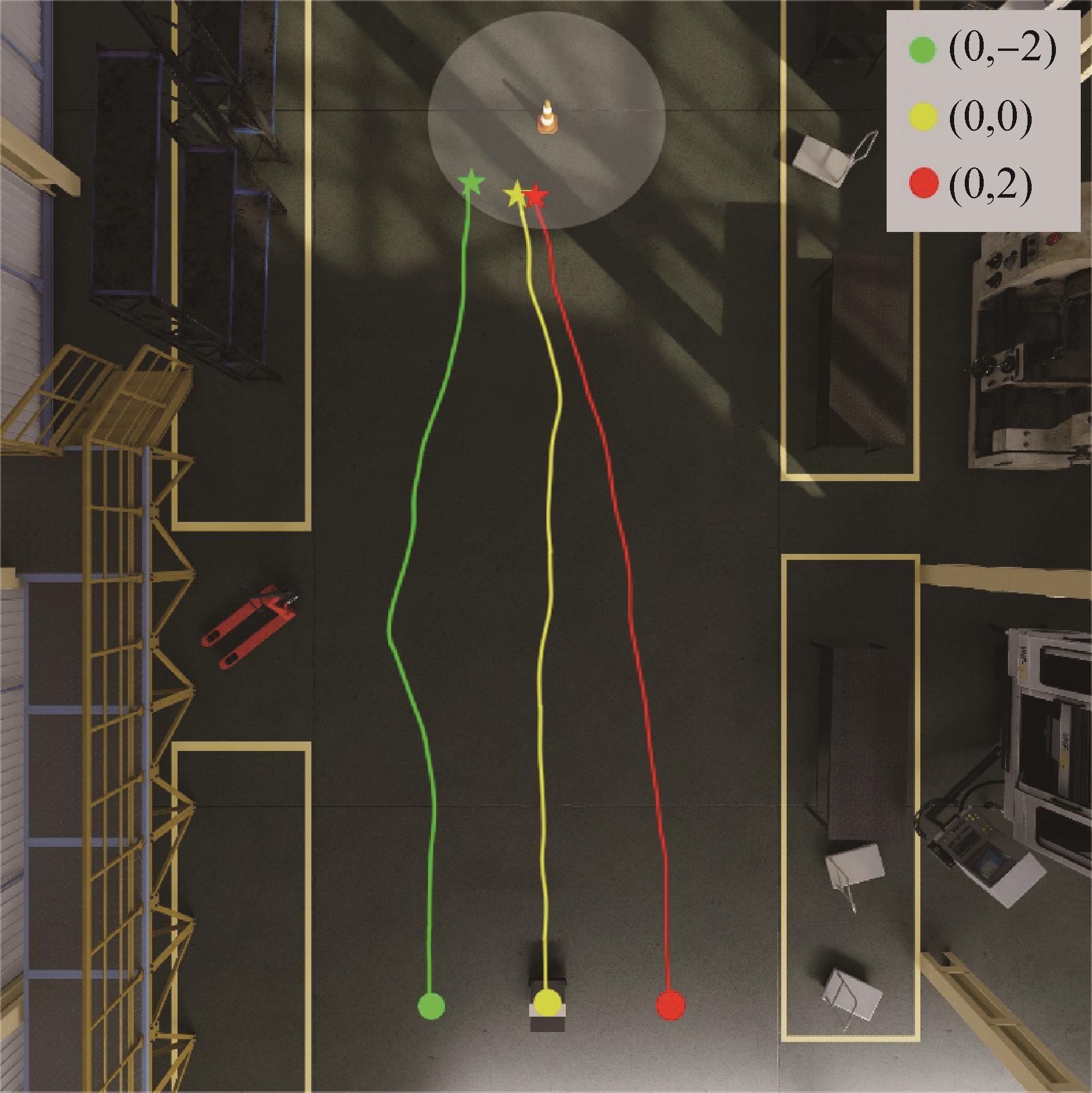
Table 4
Simulation experimental results list
| 轮次 | 行人刷新位置 | 任务完成时间/s | 最小距离值/m |
|---|---|---|---|
| 1 | 13.17 | 1.05 | |
| 2 | 13.24 | 1.44 | |
| 3 | 13.13 | 1.82 | |
| 4 | 14.02 | 1.70 |

Fig. 9
Human-Aware Navigation Testing results
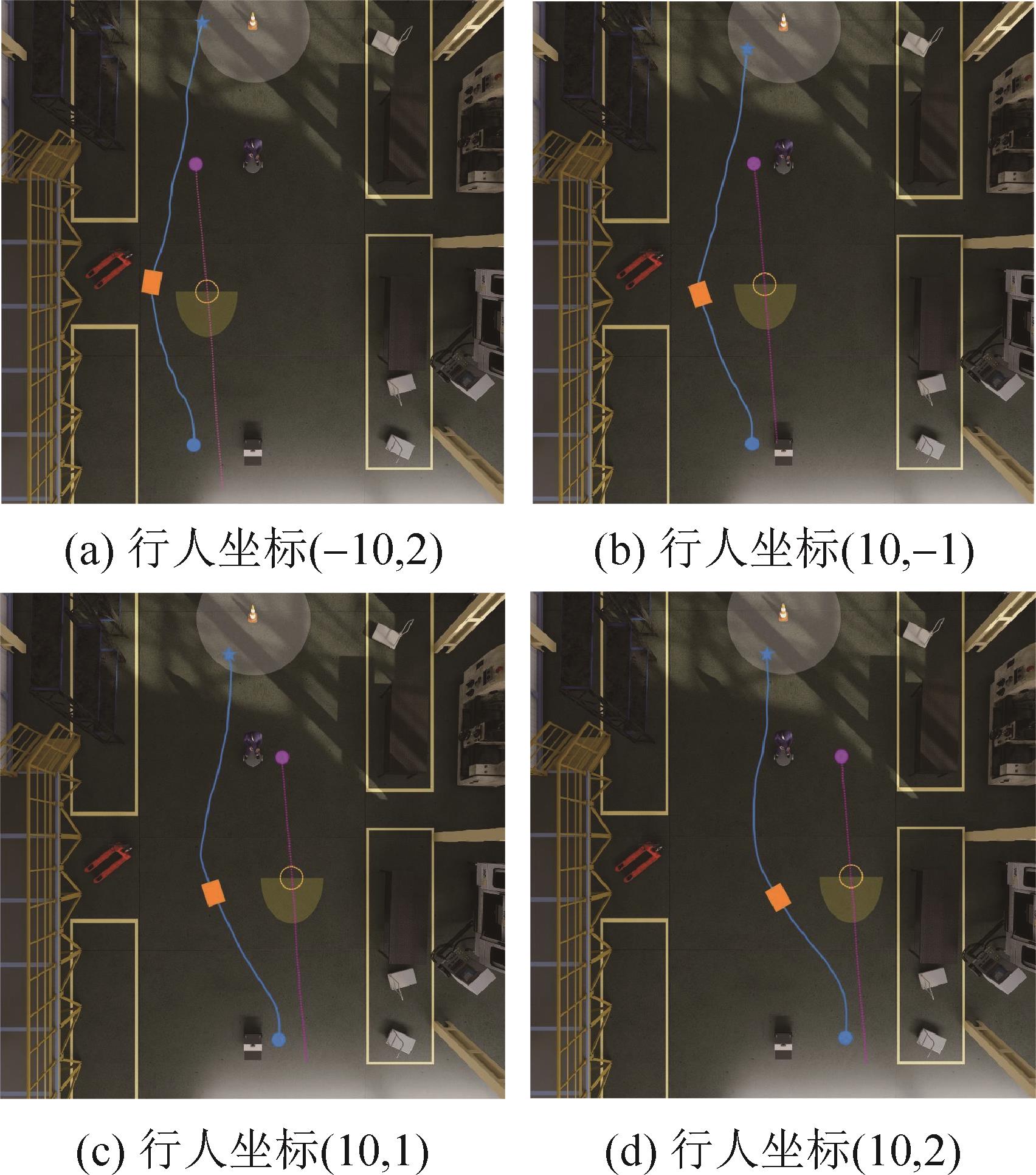
Table 5
Evaluation results list
| 轮次 | 距离 | 轮次 | 距离 | 轮次 | 距离 |
|---|---|---|---|---|---|
| 1 | 1.87 | 11 | 1.95 | 21 | |
| 2 | 1.68 | 12 | 1.96 | 22 | 1.63 |
| 3 | 1.92 | 13 | 2.45 | 23 | 0.85 |
| 4 | 0.74 | 14 | 1.25 | 24 | 1.31 |
| 5 | 1.28 | 15 | 2.09 | 25 | 1.29 |
| 6 | 2.15 | 16 | 1.61 | 26 | 2.15 |
| 7 | 17 | 2.01 | 27 | 0.95 | |
| 8 | 2.35 | 18 | 1.55 | 28 | |
| 9 | 1.80 | 19 | 1.30 | 29 | 0.79 |
| 10 | 1.35 | 20 | 1.35 | 30 | 0.72 |
| 1 | Durrant-Whyte H, Bailey T. Simultaneous Localization and Mapping: Part I[J]. IEEE Robotics & Automation Magazine, 2006, 13(2): 99-110. |
| 2 | LaValle S M. Planning Algorithms[M]. Cambridge: Cambridge University Press, 2006. |
| 3 | Yi Guohong, Feng Zhili, Mei Tiancan, et al. Multi-AGVs Path Planning Based on Improved Ant Colony Algorithm[J]. The Journal of Supercomputing, 2019, 75(9): 5898-5913. |
| 4 | Fransen Karlijn, van Eekelena Joost. Efficient Path Planning for Automated Guided Vehicles Using A* (Astar) Algorithm Incorporating Turning Costs in Search Heuristic[J]. International Journal of Production Research, 2023, 61(3): 707-725. |
| 5 | Nwaonumah E, Samanta B. Deep Reinforcement Learning for Visual Navigation of Wheeled Mobile Robots[C]//2020 SoutheastCon. Piscataway: IEEE, 2020: 1-8. |
| 6 | Zhu Yuke, Mottaghi R, Kolve E, et al. Target-driven Visual Navigation in Indoor Scenes Using Deep Reinforcement Learning[C]//2017 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2017: 3357-3364. |
| 7 | Li Keyu, Xu Yangxin, Wang Jiankun, et al. SARL: Deep Reinforcement Learning Based Human-aware Navigation for Mobile Robot in Indoor Environments[C]//2019 IEEE International Conference on Robotics and Biomimetics (ROBIO). Piscataway: IEEE, 2019: 688-694. |
| 8 | Lu Xiaojun, Woo Hanwool, Faragasso Angela, et al. Socially Aware Robot Navigation in Crowds via Deep Reinforcement Learning with Resilient Reward Functions[J]. Advanced Robotics, 2022, 36(8): 388-403. |
| 9 | Wang S H, Wu Y H, Li T H S. Deep Reinforcement Learning with Pedestrian Trajectory Prediction Model for Service Robot Navigation in Crowded Environments[C]//2023 International Conference on Advanced Robotics and Intelligent Systems (ARIS). Piscataway: IEEE, 2023: 1-6. |
| 10 | Cimurs Reinis, Jin Han Lee, Il Hong Suh. Goal-oriented Obstacle Avoidance with Deep Reinforcement Learning in Continuous Action Space[J]. Electronics, 2020, 9(3): 411. |
| 11 | Lian Pengfei, Yuan Liang, Sun Lihui. Visual Navigation for Mobile Robots Based on Deep Reinforcement Learning[C]//2023 IEEE International Conference on Real-time Computing and Robotics (RCAR). Piscataway: IEEE, 2023: 650-656. |
| 12 | Xue Honghu, Hein Benedikt, Bakr Mohamed, et al. Using Deep Reinforcement Learning with Automatic Curriculum Learning for Mapless Navigation in Intralogistics[J]. Applied Sciences, 2022, 12(6): 3153. |
| 13 | Sunil Srivatsav Samsani, Mutahira Husna, Mannan Saeed Muhammad. Memory-based Crowd-aware Robot Navigation Using Deep Reinforcement Learning[J]. Complex & Intelligent Systems, 2023, 9(2): 2147-2158. |
| 14 | 林俊强, 王红军, 邹湘军, 等. 基于DPPO的移动采摘机器人避障路径规划及仿真[J]. 系统仿真学报, 2023, 35(8): 1692-1704. |
| Lin Junqiang, Wang Hongjun, Zou Xiangjun, et al. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO[J]. Journal of System Simulation, 2023, 35(8): 1692-1704. | |
| 15 | Schulman J, Wolski F, Dhariwal P, et al. Proximal Policy Optimization Algorithms[EB/OL]. (2017-08-28) [2023-12-20]. . |
| 16 | Schulman J, Levine S, Abbeel P, et al. Trust Region Policy Optimization[C]//Proceedings of the 32nd International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2015: 1889-1897. |
| 17 | Mnih V, Adrià Puigdomènech Badia, Mirza M, et al. Asynchronous Methods for Deep Reinforcement Learning[C]//Proceedings of the 33rd International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2016: 1928-1937. |
| 18 | 夏家伟, 朱旭芳, 罗亚松, 等. 基于深度强化学习的无人艇轨迹跟踪算法研究[J]. 华中科技大学学报(自然科学版), 2023, 51(5): 74-80. |
| Xia Jiawei, Zhu Xufang, Luo Yasong, et al. Study on Trajectory Tracking Algorithm of Unmanned Surface Vehicle Based on Deep Reinforcement Learning[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2023, 51(5): 74-80. | |
| 19 | Xiao Xin, Feng Xinlong. Multi-object Pedestrian Tracking Using Improved YOLOv8 and OC-SORT[J]. Sensors, 2023, 23(20): 8439. |
| 20 | Pacchierotti Elena, Christensen Henrik I, Jensfelt Patric. Evaluation of Passing Distance for Social Robots[C]//ROMAN 2006 - The 15th IEEE International Symposium on Robot and Human Interactive Communication. Piscataway: IEEE, 2006: 315-320. |
| 21 | 孙立香, 孙晓娴, 刘成菊, 等. 人群环境中基于深度强化学习的移动机器人避障算法[J]. 信息与控制, 2022, 51(1): 107-118. |
| Sun Lixiang, Sun Xiaoxian, Liu Chengju, et al. Obstacle Avoidance Algorithm for Mobile Robot Based on Deep Reinforcement Learning in Crowd Environment[J]. Information and Control, 2022, 51(1): 107-118. |
| [1] | Chen Yanjun, Zhou Min, Zha Meng, Zhang Meizhou. Research and Analysis of Algorithm for Detecting Surface Defects on Automotive Wheel Hubs Based on CCL-YOLOv8 [J]. Journal of System Simulation, 2026, 38(3): 670-686. |
| [2] | Wu Shuxia, Zhang Junjie, Chen Delong, Chen Zheyi. Resource-efficient Continuous Learning Framework for Edge Real-time Video Analytics [J]. Journal of System Simulation, 2026, 38(2): 294-306. |
| [3] | Li Xinyi, Wang Zhenfei, Wu Han. Research on UAV Target Tracking Algorithm for Simulation Scenarios [J]. Journal of System Simulation, 2026, 38(2): 346-359. |
| [4] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [5] | Liu Quan, Wang Yu, Liu Linyue, Chen Hao, Huang Jian. Knowledge Closed-loop Driving-based Intelligent Game Confrontation Simulation [J]. Journal of System Simulation, 2026, 38(2): 416-432. |
| [6] | Gong Feng, Jiang Tao, Zhang Qin, Liu Yu. Simulation and Optimization of Support Processes for Aircraft Fleet Launch Under Limited Resources [J]. Journal of System Simulation, 2025, 37(8): 1965-1977. |
| [7] | Lu Bin, Yang Xuan, Yang Zhenyu, Gao Xiaotian. Adaptive Sampling and Ghost Multi-scale Fusion for Lightweight Weld Defect Detection [J]. Journal of System Simulation, 2025, 37(8): 1978-1990. |
| [8] | Zhang Yue, Zhang Wenliang, Feng Qiang, Guo Xing, Ren Yi, Wang Zili. Combat-oriented Comprehensive Simulation and Verification Technology for Equipment System RMS [J]. Journal of System Simulation, 2025, 37(7): 1823-1835. |
| [9] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [10] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [11] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [12] | Wu Guohua, Zeng Jiaheng, Wang Dezhi, Zheng Long, Zou Wei. A Quadrotor Trajectory Tracking Control Method Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(5): 1169-1187. |
| [13] | Li Jie, Liu Yang, Li Liang, Su Bengan, Wei Jialong, Zhou Guangda, Shi Yanmin, Zhao Zhen. Remote Sensing Small Object Detection Based on Cross-stage Two-branch Feature Aggregation [J]. Journal of System Simulation, 2025, 37(4): 1025-1040. |
| [14] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [15] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
