

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (2): 405-414.doi: 10.16182/j.issn1004731x.joss.22-1105
• Papers • Previous Articles Next Articles
Pan Hainan( ), Chen Bailiang, Huang Kaihong(), Ren Junkai, Cheng Chuang, Lu Huimin, Zhang Hui
), Chen Bailiang, Huang Kaihong(), Ren Junkai, Cheng Chuang, Lu Huimin, Zhang Hui
Received:2022-09-20
Revised:2022-12-11
Online:2024-02-15
Published:2024-02-04
Contact:
Huang Kaihong
E-mail:phn@nudt.edu.cn;kaihong.huang@nudt.edu.cn
CLC Number:
Pan Hainan, Chen Bailiang, Huang Kaihong, Ren Junkai, Cheng Chuang, Lu Huimin, Zhang Hui. Flipper Control Method for Tracked Robot Based on Deep Reinforcement Learning[J]. Journal of System Simulation, 2024, 36(2): 405-414.

Fig. 1
Platform of tracked robot with four flippers
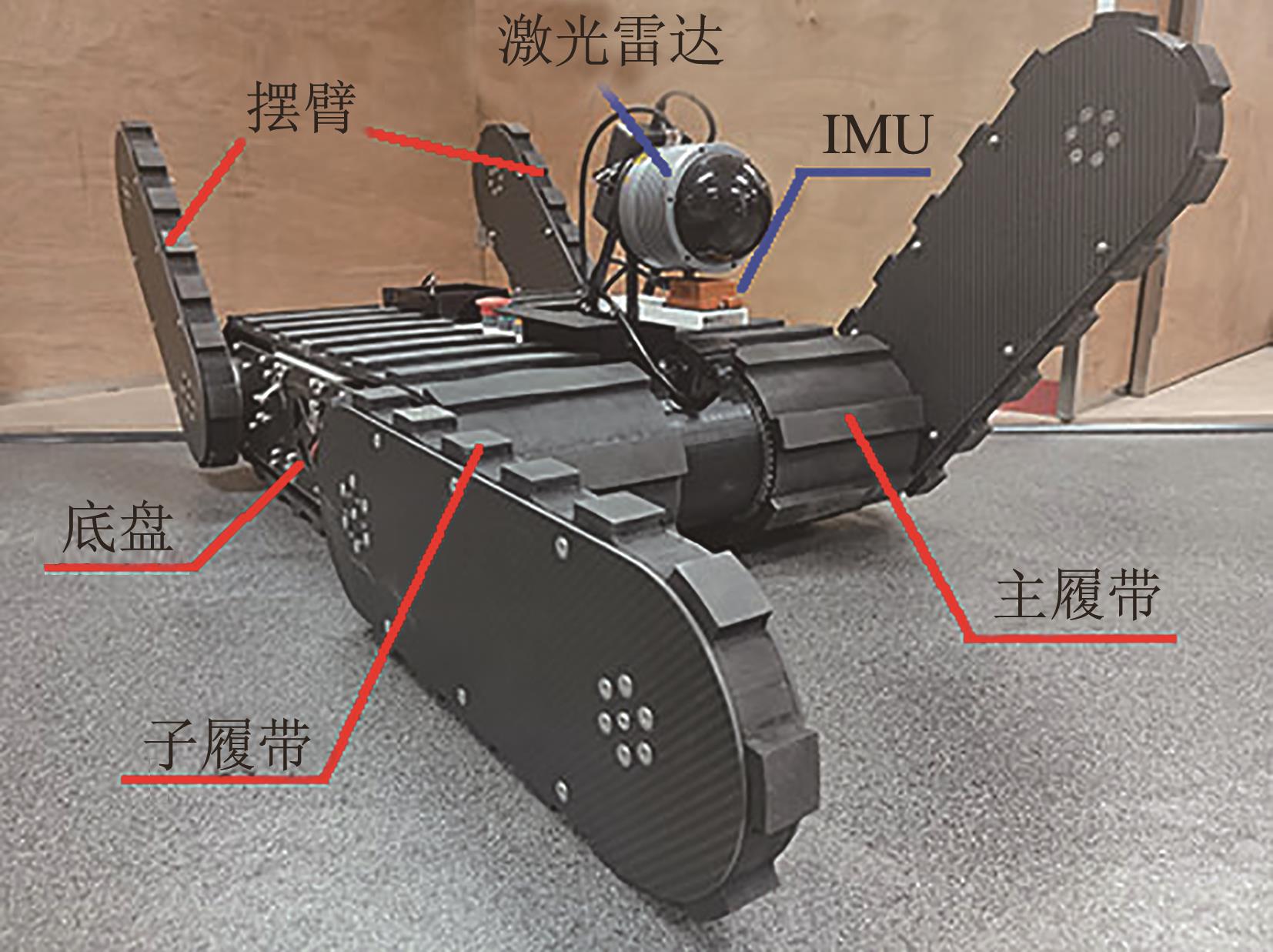
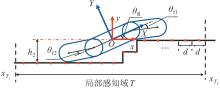
Fig. 2
State space of obstacle crossing task
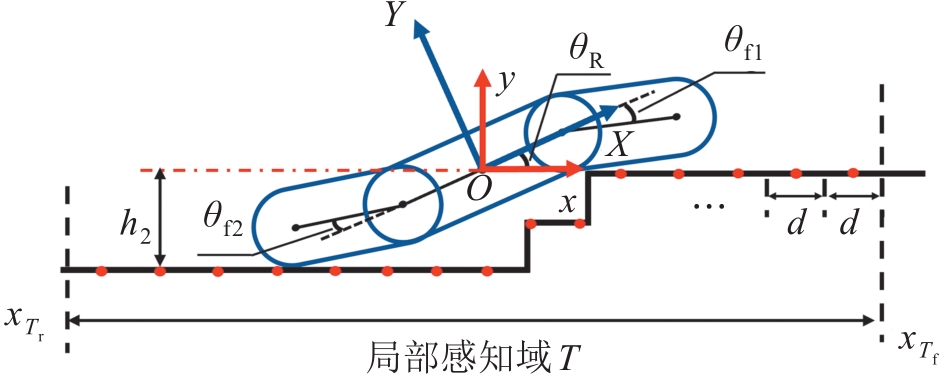
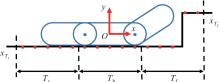
Fig. 3
Division of local sense field
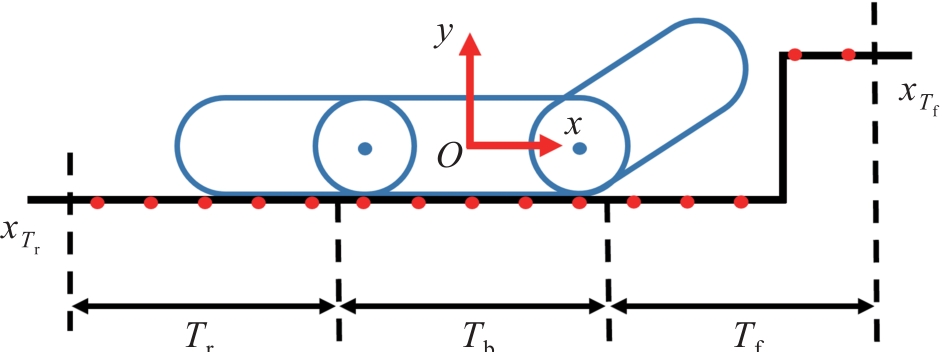
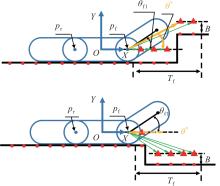
Fig. 4
Reward design based on front flipper function
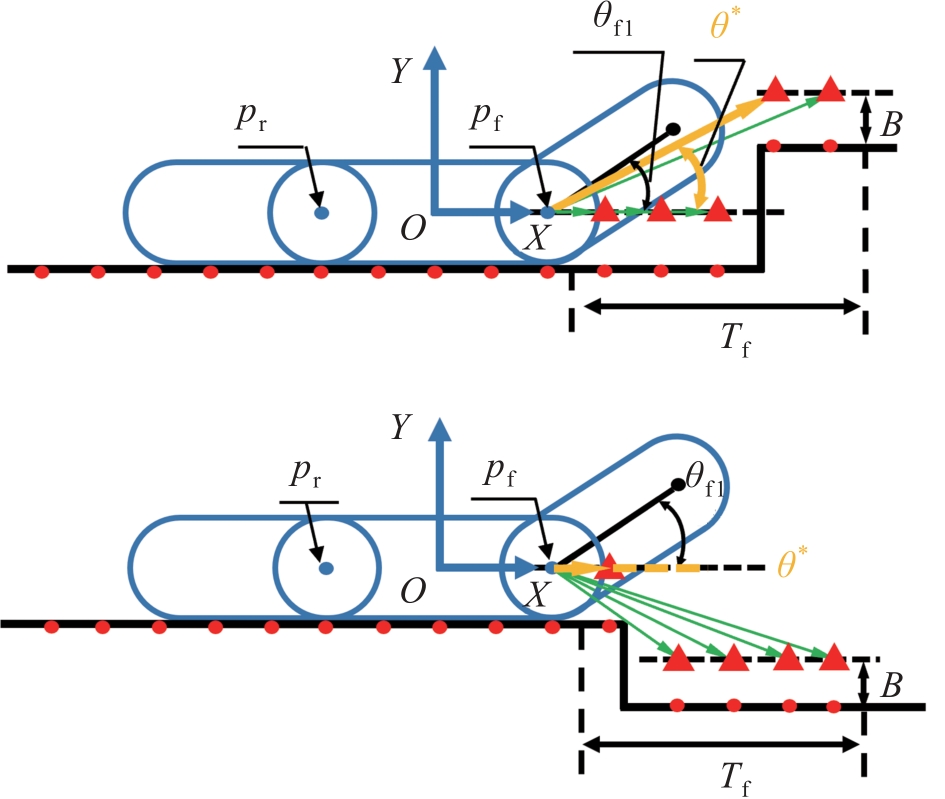

Fig. 5
Network structure of autonomous flipper control algorithm
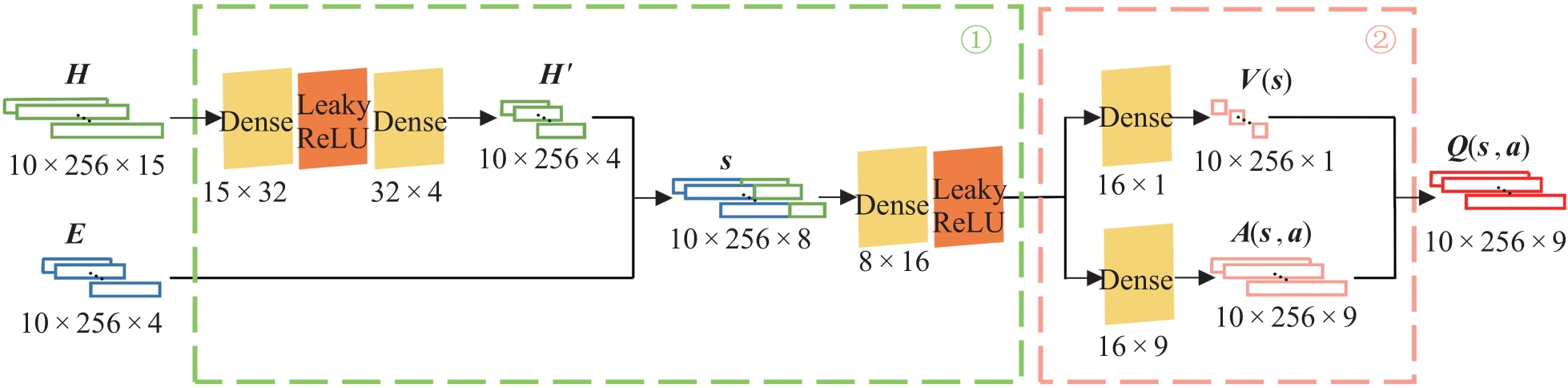

Fig. 6
2D simulation environment of Pymunk
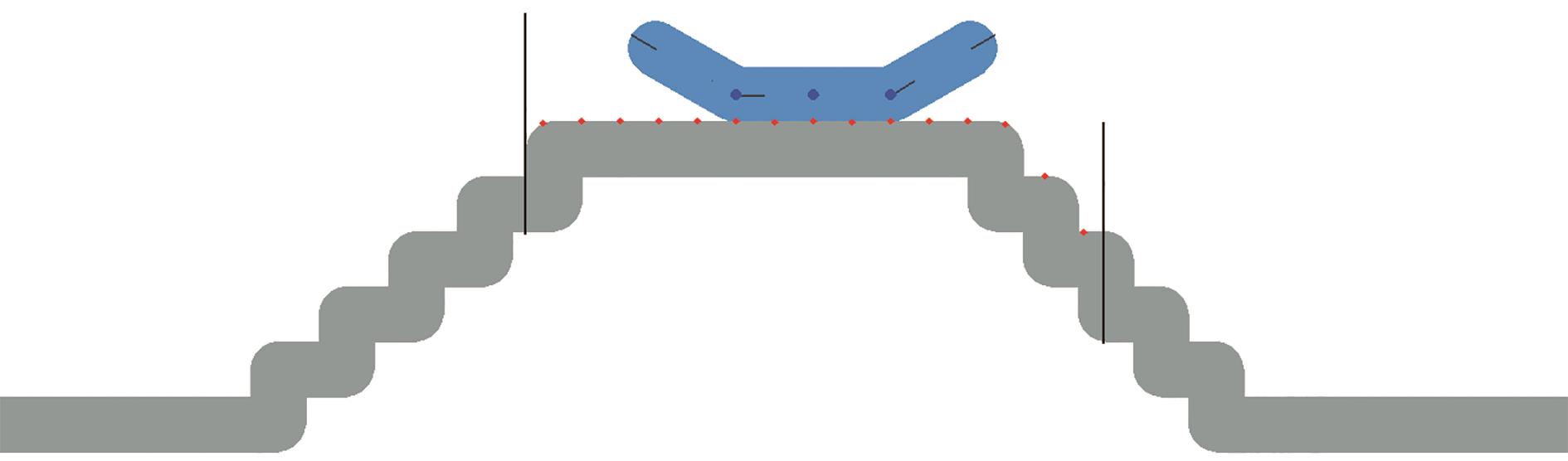
Table 1
Robot physical parameters
| 摆臂长度 | 底盘长度 | 机器人厚度 |
|---|---|---|
| 0.536 | 0.760 | 0.200 |
Table 2
Parameters of flipper control algorithm
| γ | lr | |||||
|---|---|---|---|---|---|---|
| 0.04 | 0.1 | 10 | 3 | 400 | 0.96 | 0.000 5 |
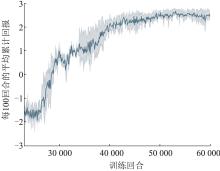
Fig. 7
Training curve of flipper control strategy in steps
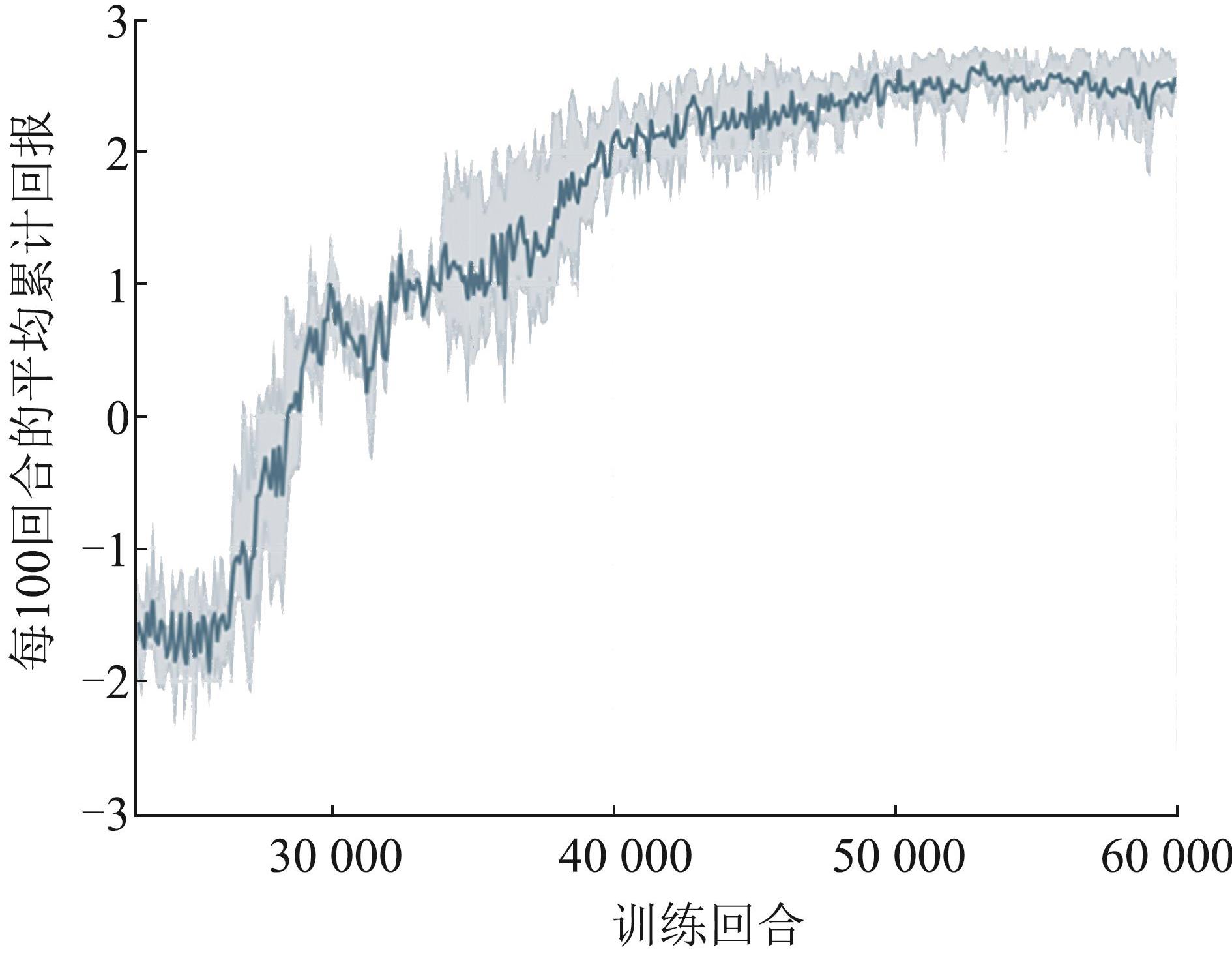
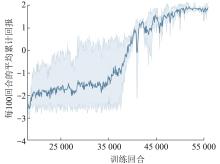
Fig. 8
Training curve of flipper control strategy in stairs
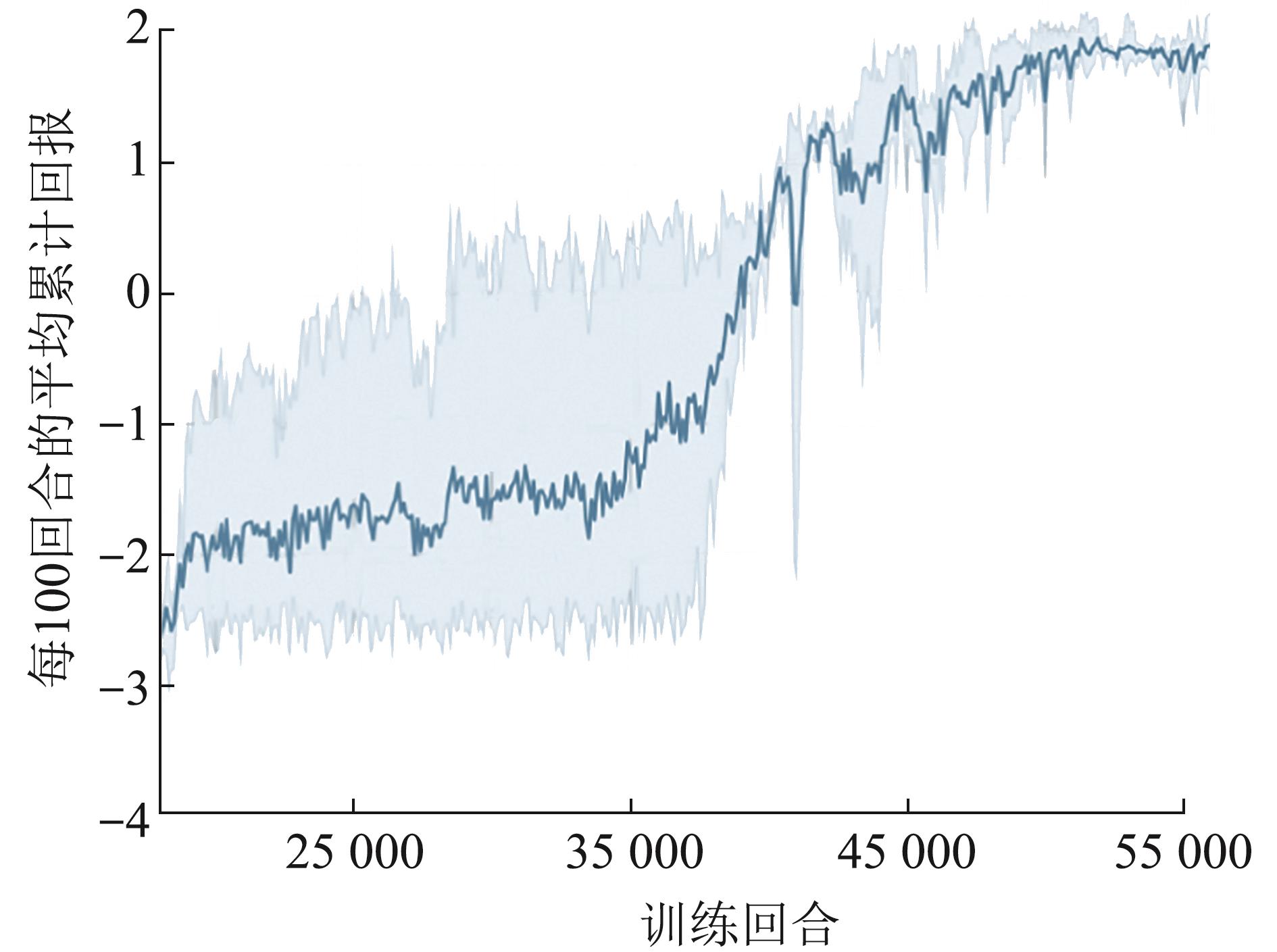
Fig. 9
Cameras and 3D real-time mapping in Gazebo
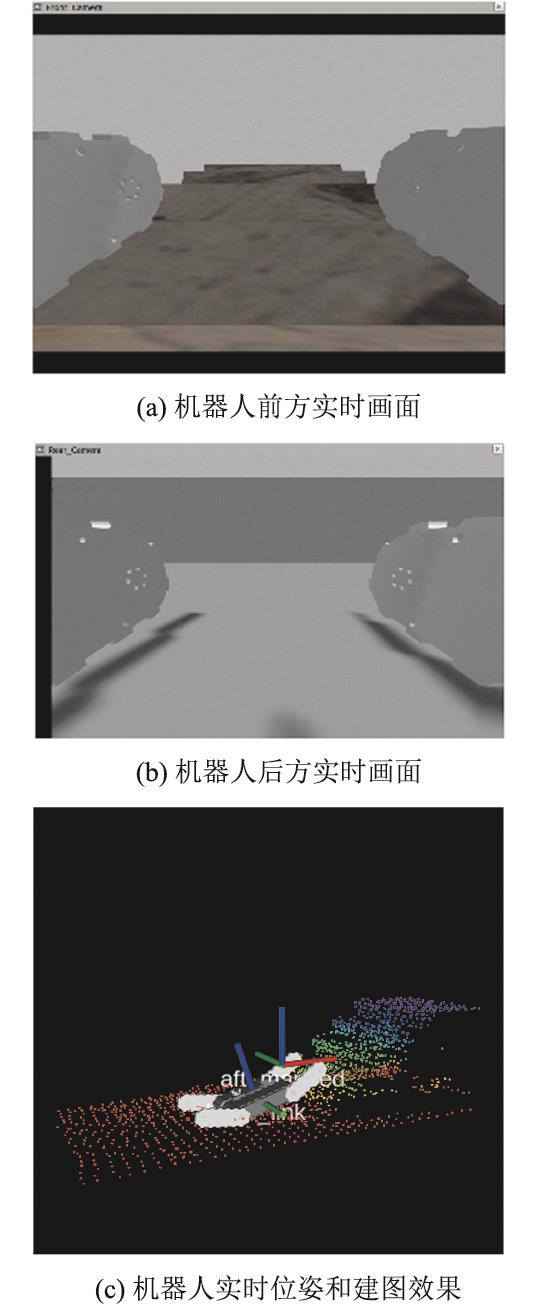

Fig. 10
Experimental results
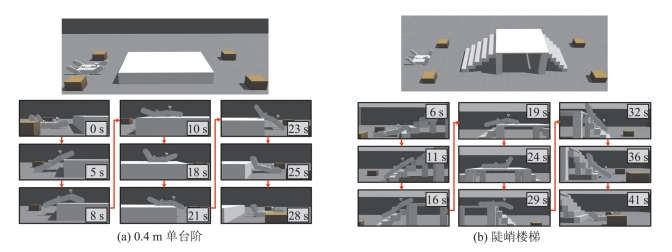
Table 3
Parameters of terrains
| 地形场景 | 越障类型 | 台阶高度/m | 台阶长度/m | 台阶数量 | 楼梯坡度/(°) |
|---|---|---|---|---|---|
| 0.4 m单台阶 | 向上/向下 | 0.4 | 3.0 | 1 | |
| 陡峭楼梯 | 向上 | 0.2 | 0.3 | 6 | 33.7 |
| 向下 | 0.2 | 0.2 | 6 | 45.0 |

Fig. 11
Comparison between our algorithm and human manual operation in two task terrains
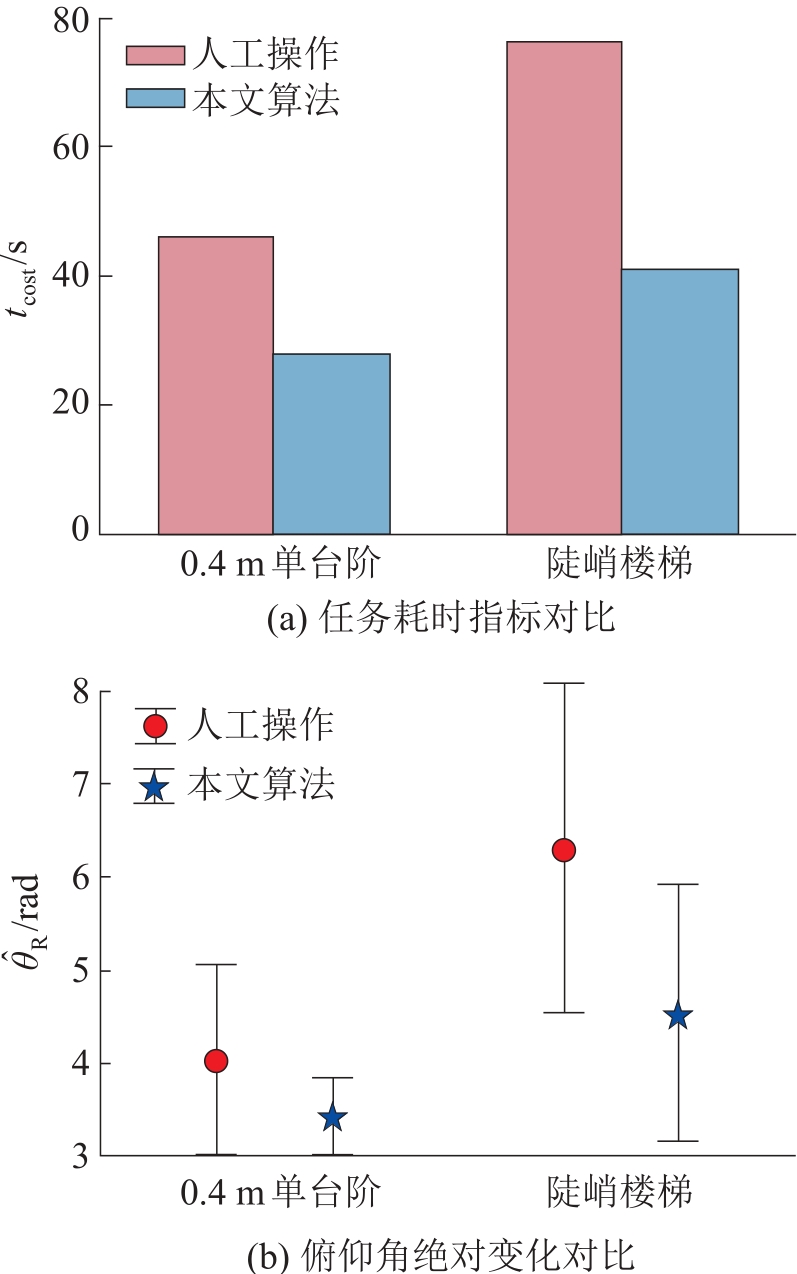
Table 4
Indicator comparison between manual and our work
| 指标 | 人工操作 | 本文算法 | ||
|---|---|---|---|---|
0.4 m 单台阶 | 陡峭 楼梯 | 0.4 m 单台阶 | 陡峭 楼梯 | |
| tcost/s | 46.17 | 76.53 | 28.07 | 41.21 |
| 4.02 | 6.30 | 3.43 | 4.53 | |
| 2.92 | 3.88 | 1.11 | 2.60 | |
| 1 | Liu Jinguo, Wang Yuechao, Li Bin, et al. Current Research, Key Performances and Future Development of Search and Rescue Robots[J]. Frontiers of Mechanical Engineering in China, 2007, 2(4): 404-416. |
| 2 | Kruijff G J M, Pirri F, Gianni M, et al. Rescue Robots at Earthquake-hit Mirandola, Italy: A Field Report[C]//2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Piscataway, NJ, USA: IEEE, 2012: 1-8. |
| 3 | Kruijff G J M, Janíček M, Keshavdas S, et al. Experience in System Design for Human-robot Teaming in Urban Search and Rescue[M]//Yoshida K, Tadokoro S. Field and Service Robotics: Results of the 8th International Conference. Berlin, Heidelberg: Springer Berlin Heidelberg, 2014: 111-125. |
| 4 | 商德勇. 薄煤层综采工作面巡检机器人运动分析及试验研究[D]. 北京: 中国矿业大学(北京), 2016. |
| Shang Deyong. Study on Motion Analysis and Experiment of the Inspection Robot for Fully-mechanized Workface in Thin Coal Seam[D]. Beijing: China University of Mining & Technology(Beijing), 2016. | |
| 5 | Ohno K, Morimura S, Tadokoro S, et al. Semi-autonomous Control System of Rescue Crawler Robot Having Flippers for Getting Over Unknown-steps[C]//2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2007: 3012-3018. |
| 6 | Nagatani K, Yamasaki A, Yoshida K, et al. Semi-autonomous Traversal on Uneven Terrain for a Tracked Vehicle Using Autonomous Control of Active Flippers[C]//2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2008: 2667-2672. |
| 7 | Okada Y, Nagatani K, Yoshida K, et al. Shared Autonomy System for Tracked Vehicles on Rough Terrain Based on Continuous Three-dimensional Terrain Scanning[J]. Journal of Field Robotics, 2011, 28(6): 875-893. |
| 8 | Kober J, Bagnell J A, Peters J, et al. Reinforcement Learning in Robotics: A Survey[J]. The International Journal of Robotics Research, 2013, 32(11): 1238-1274. |
| 9 | Zimmermann K, Zuzanek P, Reinstein M, et al. Adaptive Traversability of Unknown Complex Terrain with Obstacles for Mobile Robots[C]//2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2014: 5177-5182. |
| 10 | Paolo G, Tai Lei, Liu Ming. Towards Continuous Control of Flippers for a Multi-terrain Robot Using Deep Reinforcement Learning[J]. (2017-09-25) [2022-09-19]. . |
| 11 | Mitriakov A, Papadakis P, Mai Nguyen S, et al. Staircase Traversal via Reinforcement Learning for Active Reconfiguration of Assistive Robots[C]//2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). Piscataway, NJ, USA: IEEE, 2020: 1-8. |
| 12 | Mitriakov A, Papadakis P, Mai Nguyen S, et al. Staircase Negotiation Learning for Articulated Tracked Robots with Varying Degrees of Freedom[C]//2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Piscataway, NJ, USA: IEEE, 2020: 394-400. |
| 13 | 李允旺, 葛世荣, 朱华, 等. 四履带双摆臂机器人越障机理及越障能力[J]. 机器人, 2010, 32(2): 157-165. |
| Li Yunwang, Ge Shirong, Zhu Hua, et al. Obstacle-surmounting Mechanism and Capability of Four-track Robot with Two Swing Arms[J]. Robot, 2010, 32(2): 157-165. | |
| 14 | Suzuki S, Hasegawa S, Okugawa M. Remote Control System of Disaster Response Robot with Passive Sub-crawlers Considering Falling Down Avoidance[J]. ROBOMECH Journal, 2014, 1(1): 20. |
| 15 | Silver D, Singh S, Precup D, et al. Reward Is Enough[J]. Artificial Intelligence, 2021, 299: 103535. |
| 16 | Hasselt H. Double Q-learning[C]//Advances in Neural Information Processing Systems. San Francisco, CA, USA: Curran Associates Inc., 2010: 2613-2621. |
| 17 | Wang Ziyu, Schaul T, Hessel M, et al. Dueling Network Architectures for Deep Reinforcement Learning[C]//Proceedings of the 33rd International Conference on International Conference on Machine Learning. Cambridge: JMLR, 2016: 1995-2003. |
| 18 | Pecka M, Zimmermann K, Svoboda Tomáš. Fast Simulation of Vehicles with Non-deformable Tracks[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2017: 6414-6419. |
| 19 | Zhang Ji, Singh S. LOAM: Lidar Odometry and Mapping in Real-time[C]//Robotics: Science and Systems Conference(RSS). [S.l.]: [s.n.], 2014, 10(7): 1-9. |
| 20 | Pecka M, Šalanský Vojtěch, Zimmermann K, et al. Autonomous Flipper Control with Safety Constraints[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2016: 2889-2894. |
| [1] | Wu Shuxia, Zhang Junjie, Chen Delong, Chen Zheyi. Resource-efficient Continuous Learning Framework for Edge Real-time Video Analytics [J]. Journal of System Simulation, 2026, 38(2): 294-306. |
| [2] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [3] | Liu Quan, Wang Yu, Liu Linyue, Chen Hao, Huang Jian. Knowledge Closed-loop Driving-based Intelligent Game Confrontation Simulation [J]. Journal of System Simulation, 2026, 38(2): 416-432. |
| [4] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [5] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| [6] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [7] | Zhang Bin, Lei Yonglin, Li Qun, Gao Yuan, Chen Yong, Zhu Jiajun, Bao Chenlong. Reinforcement Learning Modeling of Missile Penetration Decision Based on Combat Simulation [J]. Journal of System Simulation, 2025, 37(3): 763-774. |
| [8] | Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(3): 595-606. |
| [9] | Fei Shuaidi, Cai Changlong, Liu Fei, Chen Minghui, Liu Xiaoming. Research on the Target Allocation Method for Air Defense and Anti-missile Defense of Naval Ships [J]. Journal of System Simulation, 2025, 37(2): 508-516. |
| [10] | Huang Sijin, Wen Jia, Chen Zheyi. Intelligent Service Migration towards MEC-based IoV Systems [J]. Journal of System Simulation, 2025, 37(2): 379-391. |
| [11] | Li Chao, Li Jiabao, Ding Caichang, Ye Zhiwei, Zuo Fangwei. Edge Surveillance Task Offloading and Resource Allocation Algorithm Based on DRL [J]. Journal of System Simulation, 2024, 36(9): 2113-2126. |
| [12] | Wang Hongjun, Lin Junqiang, Zou Xiangjun, Zhang Po, Zhou Mingxuan, Zou Weirui, Tang Yunchao, Luo Lufeng. Construction of a Virtual Interactive System for Orchards Based on Digital Twin [J]. Journal of System Simulation, 2024, 36(6): 1493-1508. |
| [13] | Zhu Zilu, Liu Yongkui, Zhang Lin, Wang Lihui, Lin Tingyu. Simulation of Robotic Peg-in-hole Assembly Strategy Based on DRL [J]. Journal of System Simulation, 2024, 36(6): 1414-1424. |
| [14] | Wang Yuan, Xu Lin, Gong Xiaoze, Zhang Yongliang, Wang Yongli. Gradient-based Deep Reinforcement Learning Interpretation Methods [J]. Journal of System Simulation, 2024, 36(5): 1130-1140. |
| [15] | Wang Xinpeng, Fu Huiqiao, Deng Guizhou, Tang Kaiqiang, Chen Chunlin, Liu Canghai. Research on Motion Planning of Hexapod Robot Based on DRL and Free Gait [J]. Journal of System Simulation, 2024, 36(2): 373-384. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
