

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (10): 2444-2454.doi: 10.16182/j.issn1004731x.joss.23-0751
• Papers • Previous Articles Next Articles
Huang Hongzhi1, Yan Kai2, Liu Changfeng2, Wang Jianwen2, Luo Bin1
Received:2023-06-20
Revised:2023-08-24
Online:2024-10-15
Published:2024-10-18
Contact:
Luo Bin
CLC Number:
Huang Hongzhi, Yan Kai, Liu Changfeng, Wang Jianwen, Luo Bin. Ground Robot Relocation Method Based on UAV Point Cloud Map[J]. Journal of System Simulation, 2024, 36(10): 2444-2454.
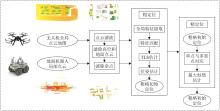
Fig. 1
Relocation flowchart
Fig. 2
Point cloud map before filtering
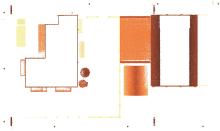
Fig. 3
Point cloud map after filtering
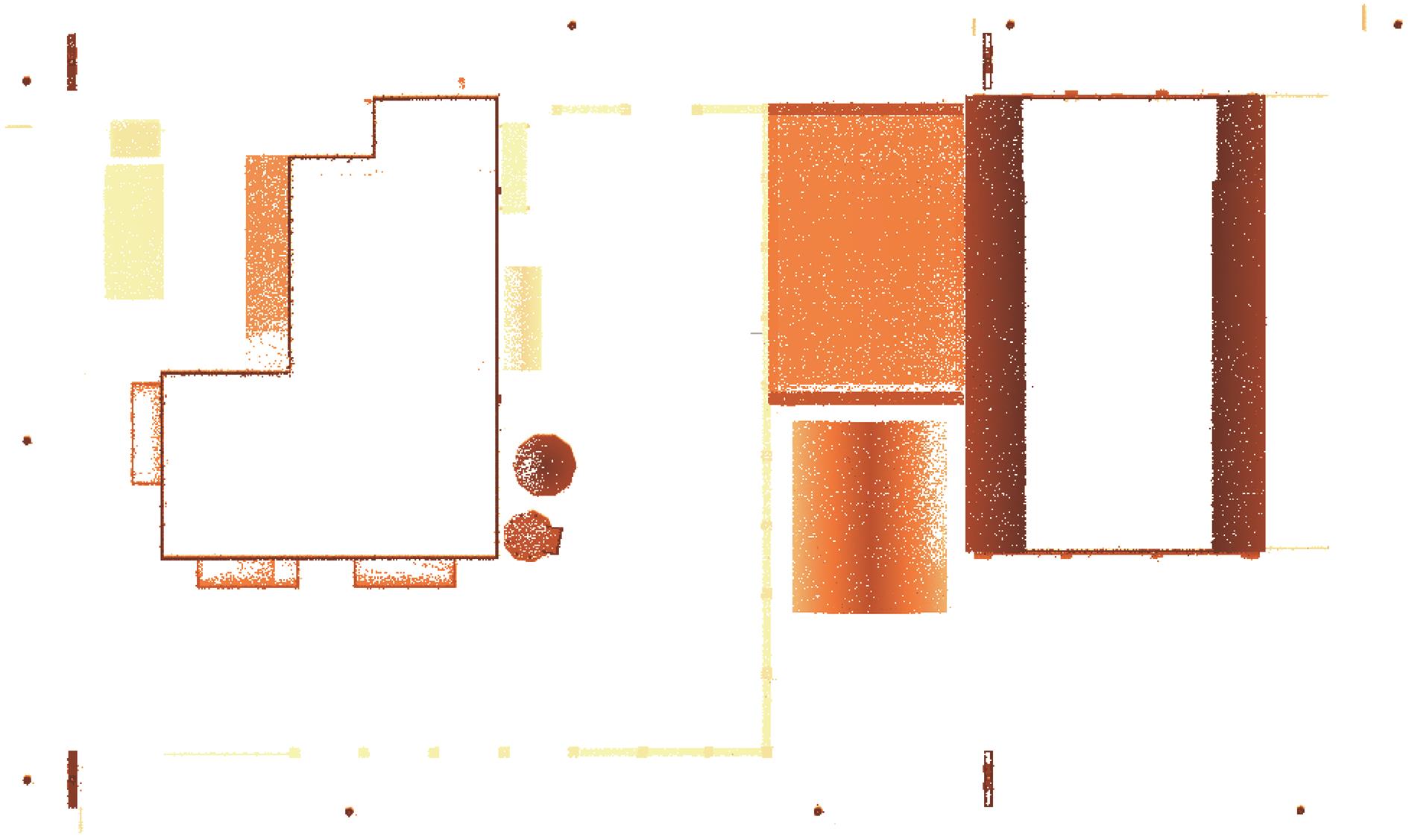
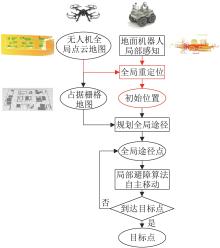
Fig. 4
Autonomous navigation framework of ground robot
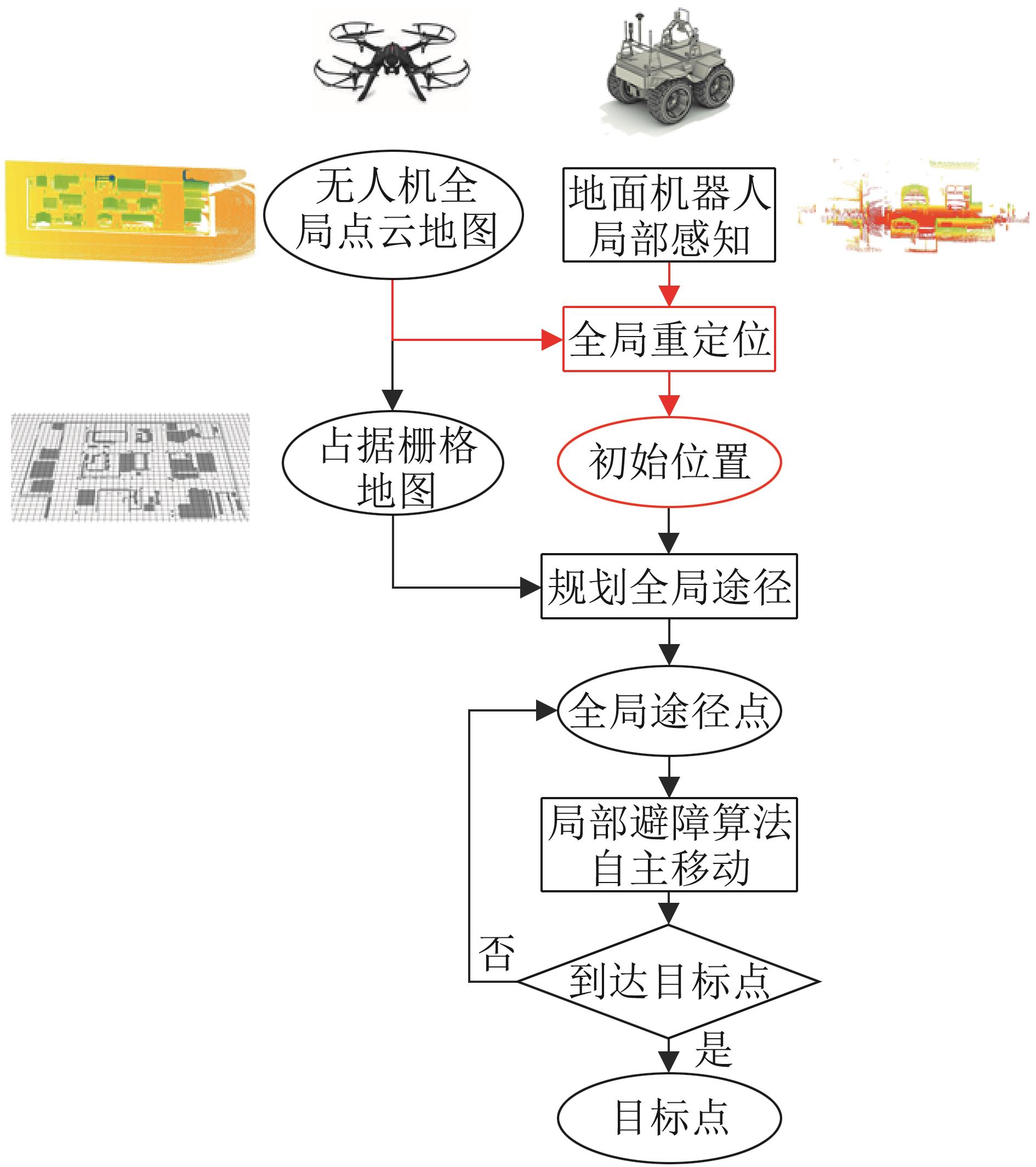

Fig. 5
Top view of simulated factory scene

Fig. 6
Top view of simulation city scene
Fig. 7
Global point cloud map of UAV
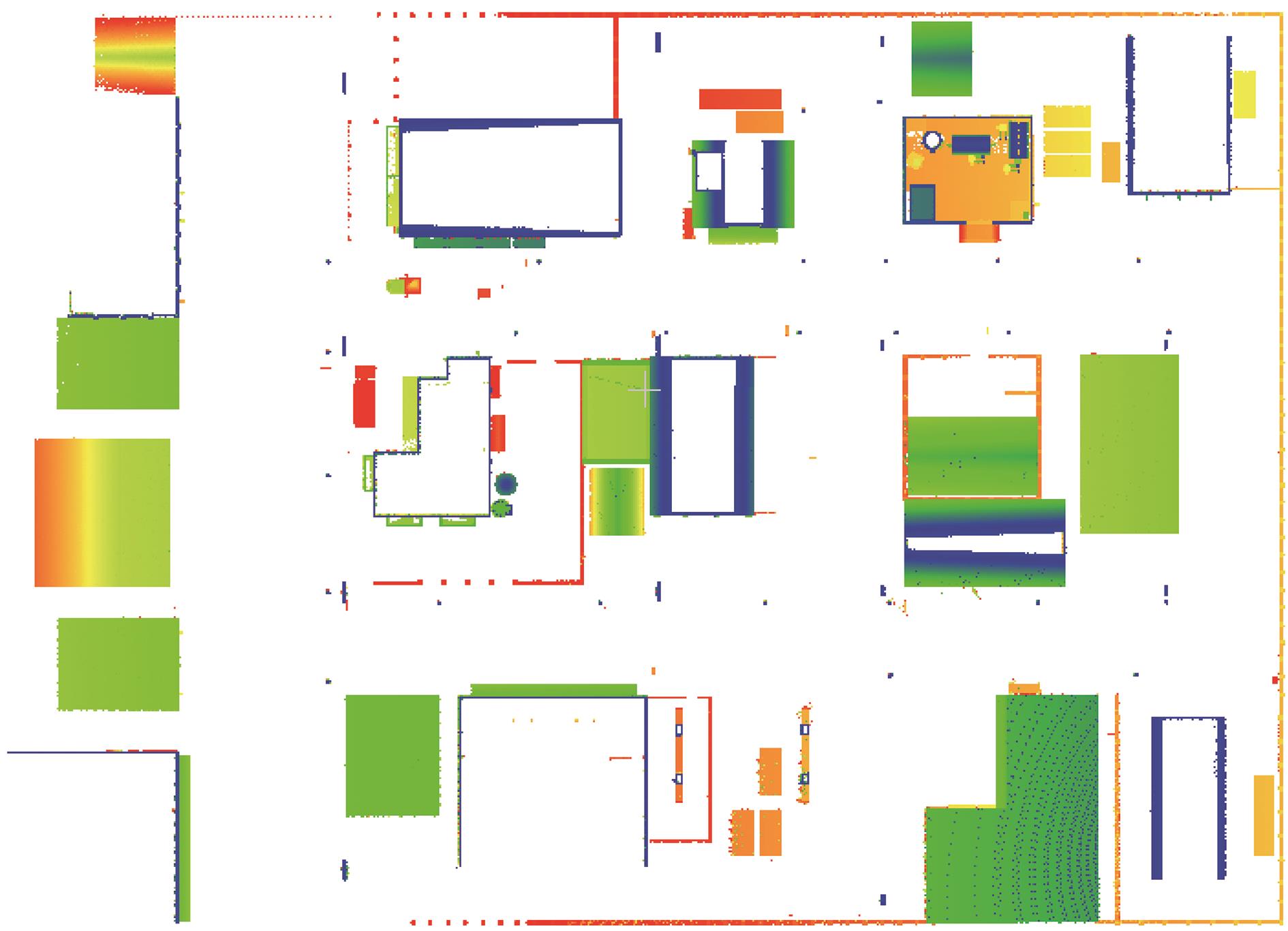

Fig. 8
Local point clouds of ground robots
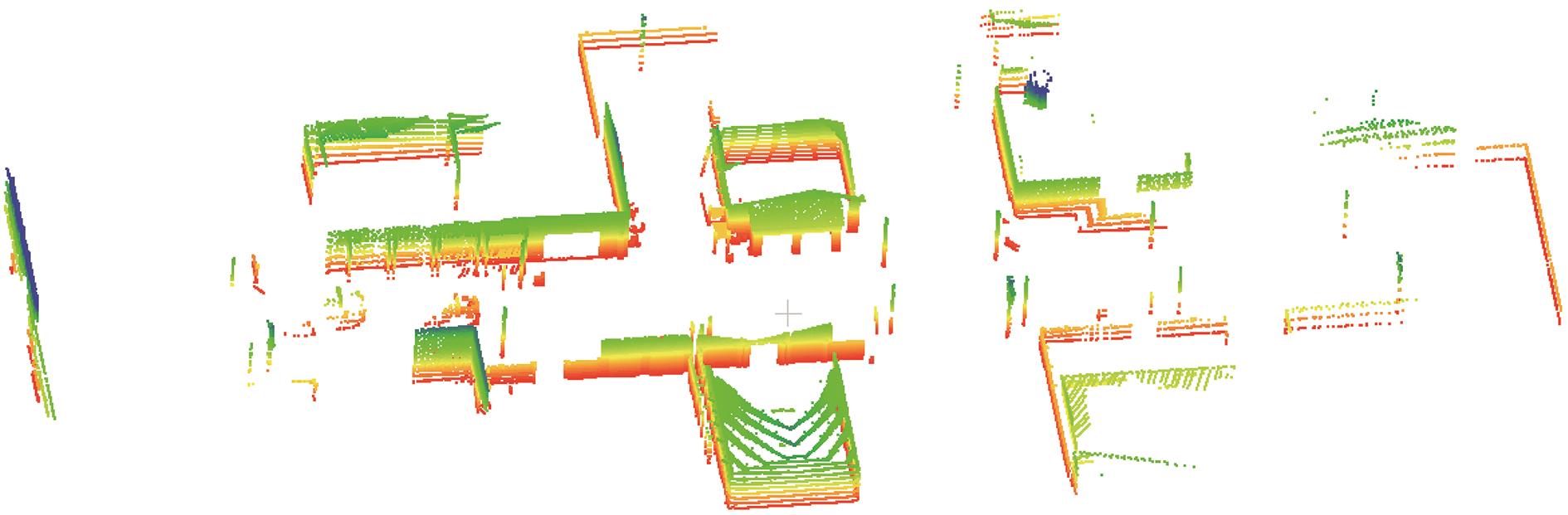

Fig. 9
Positioning comparison chart of factory scene
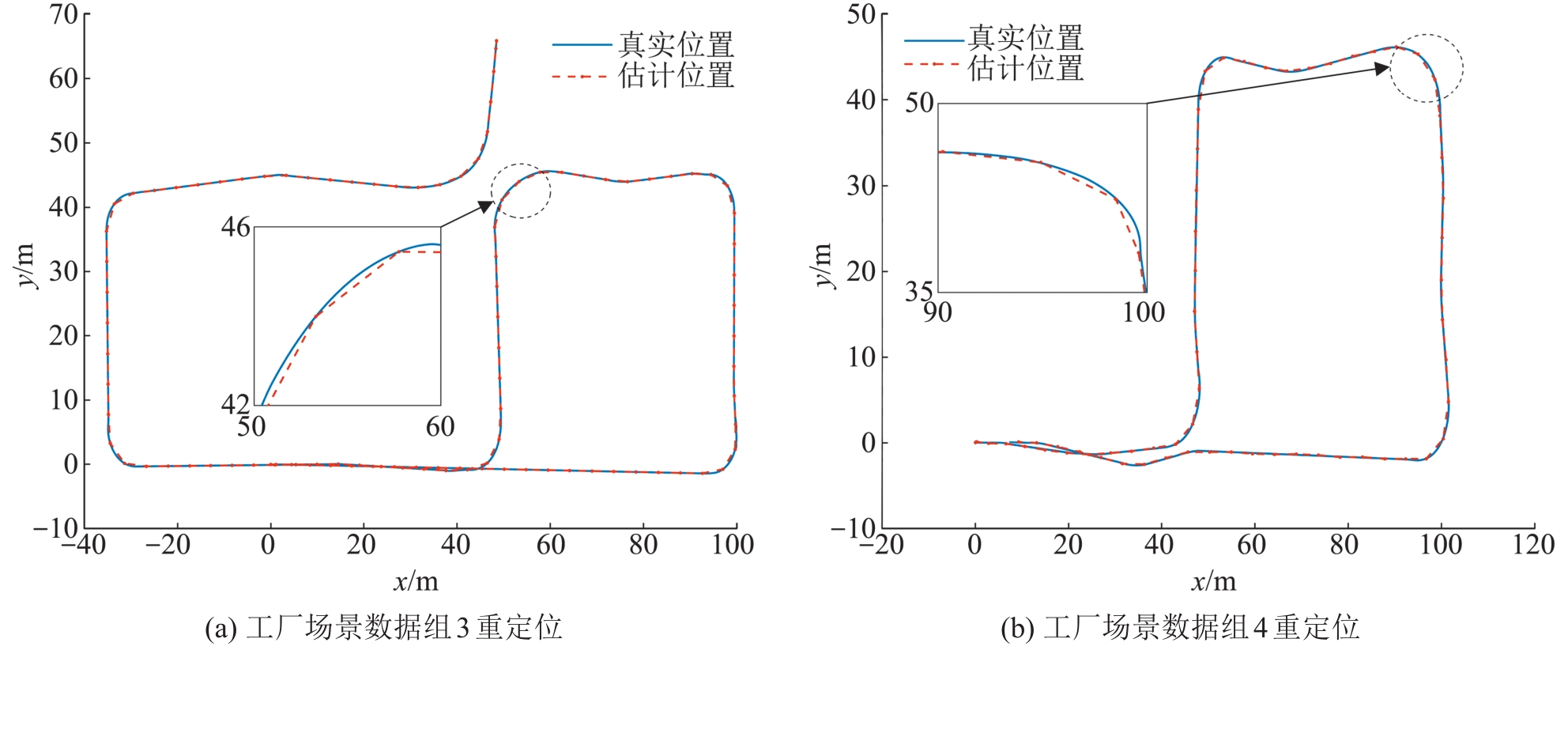
Table 1
Evaluation table for results of relocation method in this paper
| 场景 | 数据组号 | 局部点云组数量 | 重定位成功数量 | 成功率/% | 平均距离误差/m | 平均旋转误差/rad | 平均耗时/s |
|---|---|---|---|---|---|---|---|
| 工厂 | 1 | 73 | 70 | 95.89 | 0.113 | 0.009 | 14.377 |
| 2 | 58 | 56 | 96.55 | 0.144 | 0.010 | 14.693 | |
| 3 | 103 | 100 | 97.09 | 0.112 | 0.011 | 14.587 | |
| 4 | 63 | 60 | 95.24 | 0.113 | 0.009 | 14.238 | |
| 城市 | 1 | 94 | 93 | 98.94 | 0.109 | 0.008 | 17.753 |
| 2 | 130 | 127 | 97.69 | 0.132 | 0.012 | 17.682 | |
| 3 | 89 | 85 | 95.51 | 0.125 | 0.010 | 17.365 | |
| 4 | 168 | 162 | 96.43 | 0.146 | 0.013 | 17.587 |

Fig. 10
Positioning comparison chart of city scene
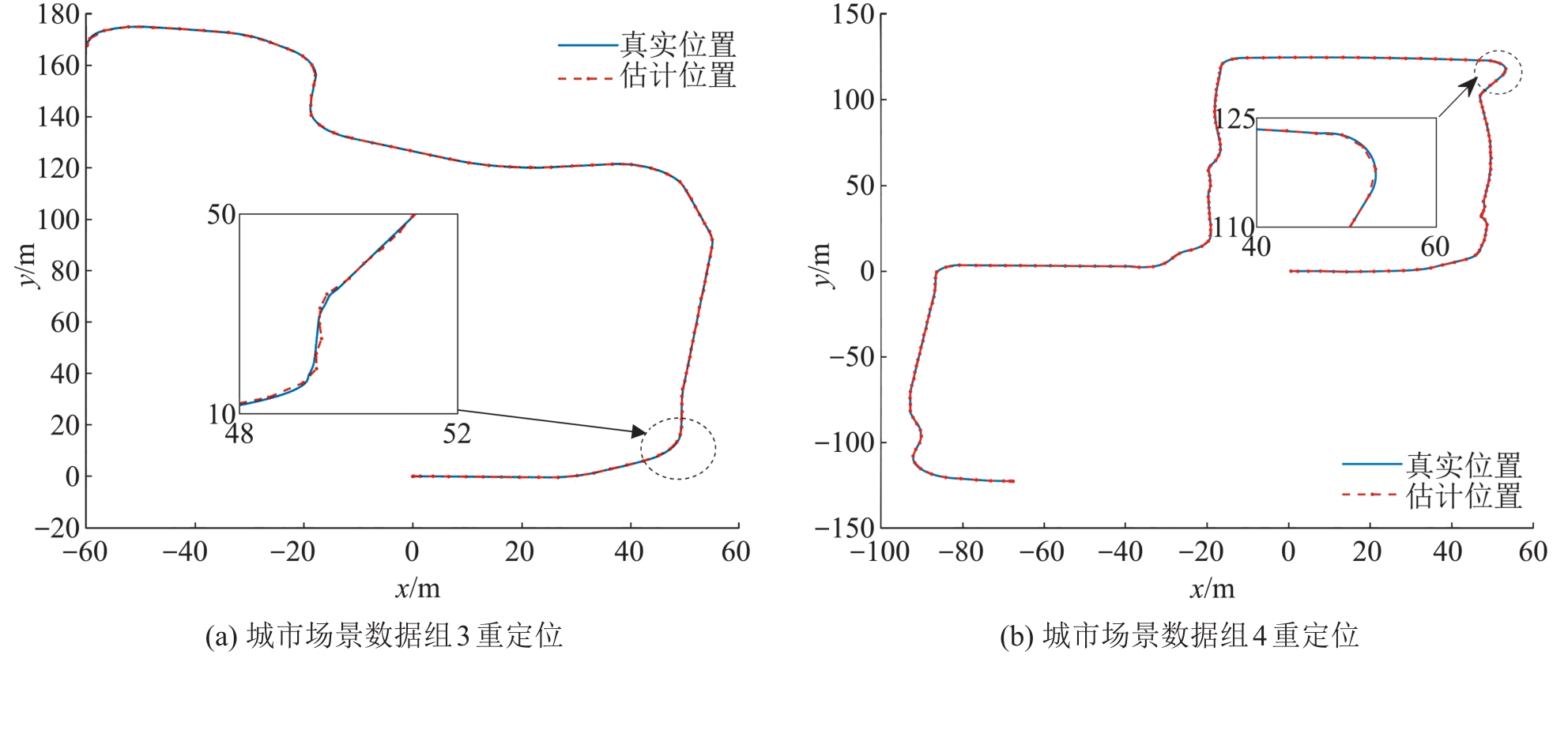
Table 2
Result table of comparison of mainstream relocation algorithms
| 算法 | 成功率/% | 平均距离误差/m | 平均旋转误差/rad | 平均耗时/s |
|---|---|---|---|---|
| 本文算法 | 97.08 | 0.112 | 0.011 1 | 14.587 |
| FPFH-RANSAC粗匹配+ICP细匹配 | 36.89 | 0.263 | 0.012 8 | 20.109 |
| FGR粗匹配+ICP细匹配 | 90.29 | 0.108 | 0.009 8 | 32.869 |
Table 3
Result table of comparison of mainstream relocation algorithms
| 高斯噪声方差/m | 成功率/% | 平均距离误差/m | 平均旋转误差/rad | 平均耗时/s |
|---|---|---|---|---|
| 0 | 97.08 | 0.112 | 0.011 1 | 14.587 |
| 0.05 | 97.08 | 0.115 | 0.010 9 | 14.786 |
| 0.10 | 96.11 | 0.127 | 0.013 6 | 17.830 |
| 0.15 | 92.23 | 0.198 | 0.013 4 | 22.634 |
| 0.20 | 88.34 | 0.277 | 0.016 4 | 28.611 |
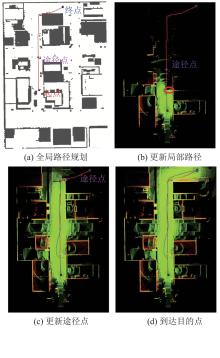
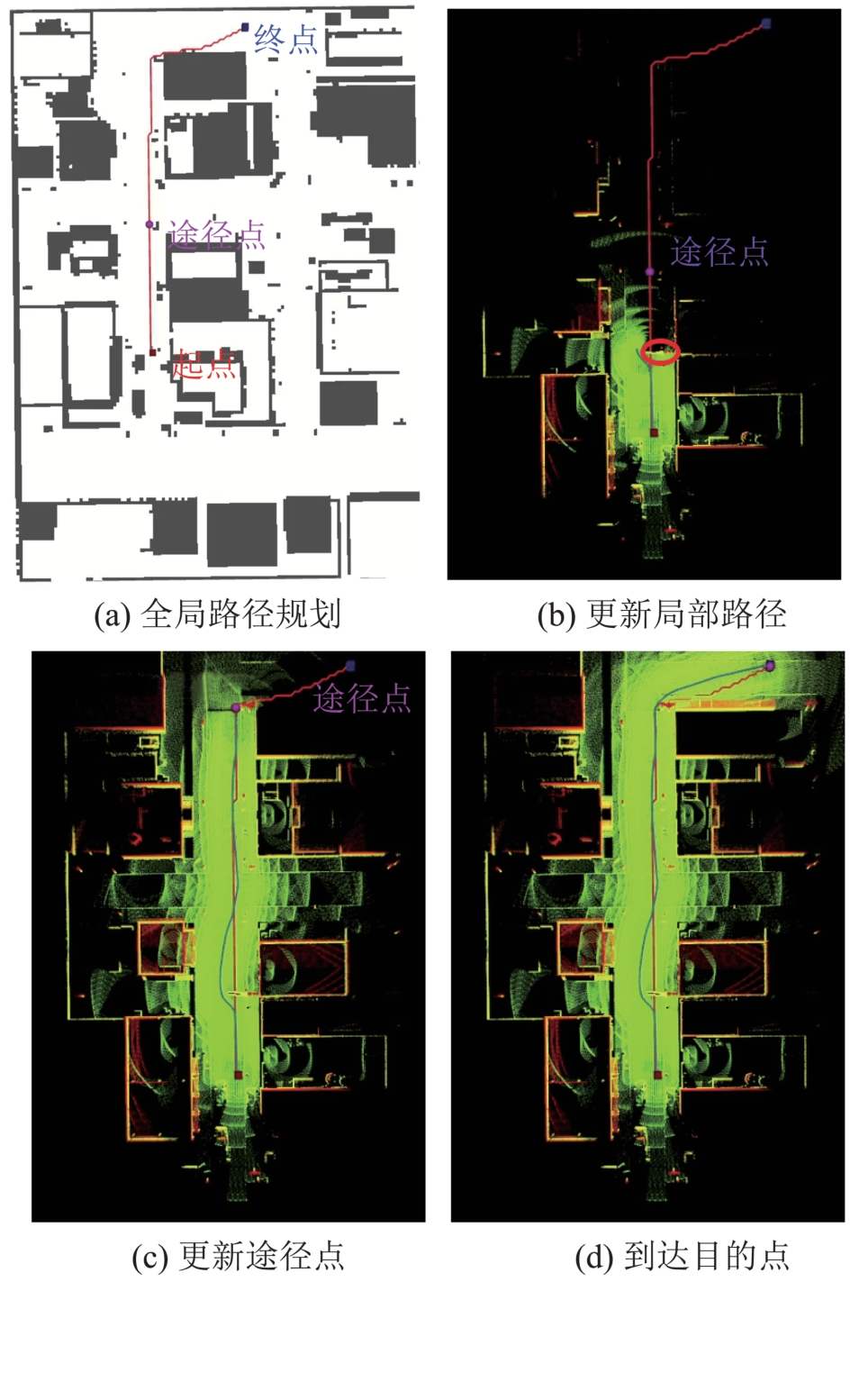
Fig. 11
Process diagram of autonomous movement
| 1 | Butzke J, Gochev K, Holden B, et al. Planning for a Ground-air Robotic System with Collaborative Localization[C]//2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2016: 284-291. |
| 2 | 朱新平, 瞿菁菁, 徐川. 森林火灾救援空地一体化指挥体系设计[J]. 消防科学与技术, 2022, 41(9): 1287-1290. |
| Zhu Xinping, Qu Jingjing, Xu Chuan. Air-ground Integrated Command System Design for Forest Fire Rescue[J]. Fire Science and Technology, 2022, 41(9): 1287-1290. | |
| 3 | Mehmood Saqib, Ahmed Shakeel, Anders Schmidt Kristensen, et al. Multi Criteria Decision Analysis (MCDA) of Unmanned Aerial Vehicles (UAVs) as a Part of Standard Response to Emergencies[C]//4th International Conference on Green Computing and Engineering Technologies. Esbjerg: Gyancity International Publishers, 2018: 116. |
| 4 | Batzdorfer S, Bobbe M, Becker M, et al. Multisensor Equipped UAV/UGV for Automated Exploration[C]//2017 International Conference on Unmanned Aerial Vehicles. Hannover: ISPRS, 2017: 33-40. |
| 5 | Mueggler Elias, Faessler Matthias, Fontana Flavio, et al. Aerial-guided Navigation of a Ground Robot Among Movable Obstacles[C]//2014 IEEE International Symposium on Safety, Security, and Rescue Robotics (2014). Piscataway: IEEE, 2014: 1-8. |
| 6 | El Houssein Chouaib Harik, Guérin François, Guinand Frédéric, et al. UAV-UGV Cooperation for Objects Transportation in an Industrial Area[C]//2015 IEEE International Conference on Industrial Technology (ICIT). Piscataway: IEEE, 2015: 547-552. |
| 7 | Heppner Georg, Roennau Arne, Dillman Ruediger. Enhancing Sensor Capabilities of Walking Robots Through Cooperative Exploration with Aerial Robots[J]. Journal of Automation, Mobile Robotics and Intelligent Systems, 2013, 7(2): 5-11. |
| 8 | 马跃龙, 曹雪峰, 陈丁, 等. 一种基于点云地图的机器人室内实时重定位方法[J]. 系统仿真学报, 2017, 29(增1): 15-23, 29. |
| Ma Yuelong, Cao Xuefeng, Chen Ding, et al. A Method for Real-time Relocalization of Indoor Robot with Point Cloud Map[J]. Journal of System Simulation, 2017, 29(S1): 15-23, 29. | |
| 9 | He Li, Wang Xiaolong, Zhang Hong. M2DP: A Novel 3D Point Cloud Descriptor and Its Application in Loop Closure Detection[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2016: 231-237. |
| 10 | Uy M A, Lee G H. PointNetVLAD: Deep Point Cloud Based Retrieval for Large-scale Place Recognition[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4470-4479. |
| 11 | Kim Giseop, Kim Ayoung. Scan Context: Egocentric Spatial Descriptor for Place Recognition Within 3D Point Cloud Map[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2018: 4802-4809. |
| 12 | Bosse M, Zlot R. Place Recognition Using Keypoint Voting in Large 3D Lidar Datasets[C]//Proceedings of 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2013: 2677-2684. |
| 13 | Gawel Abel, Cieslewski Titus, Dubé Renaud, et al. Structure-based Vision-laser Matching[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2016: 182-188. |
| 14 | Segal A V, Haehnel D, Thrun S. Generalized-ICP[EB/OL]. [2023-06-12]. . |
| 15 | Rusu R B, Cousins S. 3D Is Here: Point Cloud Library (PCL)[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 1-4. |
| 16 | Yang Heng, Shi Jingnan, Carlone L. TEASER: Fast and Certifiable Point Cloud Registration[J]. IEEE Transactions on Robotics, 2021, 37(2): 314-333. |
| 17 | Zhou Qianyi, Park J, Koltun V. Fast Global Registration[C]//Computer Vision-ECCV 2016. Cham: Springer International Publishing, 2016: 766-782. |
| 18 | Yang Heng, Carlone L. A Polynomial-time Solution for Robust Registration with Extreme Outlier Rates[EB/OL]. (2019-06-30) [2023-06-12]. . |
| 19 | Yang Heng, Antonante P, Tzoumas V, et al. Graduated Non-convexity for Robust Spatial Perception: From Non-minimal Solvers to Global Outlier Rejection[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1127-1134. |
| 20 | Perera S, Barnes N. Maximal Cliques Based Rigid Body Motion Segmentation with a RGB-D Camera[C]//Computer Vision-ACCV 2012. Berlin: Springer Berlin Heidelberg, 2013: 120-133. |
| 21 | Koide Kenji, Yokozuka Masashi, Oishi Shuji, et al. Voxelized GICP for Fast and Accurate 3D Point Cloud Registration[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 11054-11059. |
| 22 | Bai Chunge, Xiao Tao, Chen Yajie, et al. Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry Using Parallel Sparse Incremental Voxels[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4861-4868. |
| 23 | 岳伟韬, 苏婧, 谷志珉, 等. 占据栅格地图的最佳栅格大小与地图精度[J]. 机器人, 2020, 42(2): 199-206. |
| Yue Weitao, Su Jing, Gu Zhimin, et al. Best Grid Size of the Occupancy Grid Map and Its Accuracy[J]. Robot, 2020, 42(2): 199-206. | |
| 24 | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 25 | Cao Chao, Zhu Hongbiao, Yang Fan, et al. Autonomous Exploration Development Environment and the Planning Algorithms[C]//2022 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2022: 8921-8928. |
| 26 | Shah S, Dey D, Lovett C, et al. AirSim: High-fidelity Visual and Physical Simulation for Autonomous Vehicles[C]//Field and Service Robotics. Cham: Springer International Publishing, 2018: 621-635. |
| 27 | Hartley R, Trumpf J, Dai Yuchao, et al. Rotation Averaging[J]. International Journal of Computer Vision, 2013, 103(3): 267-305. |
| 28 | Baek Jieun, Park Junhyeok, Cho Seongjun, et al. 3D Global Localization in the Underground Mine Environment Using Mobile LiDAR Mapping and Point Cloud Registration[J]. Sensors, 2022, 22(8): 2873. |
| 29 | Zha Yongjian, Chen Ming, Lu Shenglian. Research on Point Cloud Registration of Industrial Parts Based on FGR-ICP Algorithm[J]. Journal of Physics: Conference Series, 2021, 1941(1): 012014. |
| [1] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [2] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [3] | Wang Yining, Liu Yanli, Xing Guanyu. Visual Relocalization Method Combining Region Classification and Local Feature Enhancement [J]. Journal of System Simulation, 2026, 38(1): 45-57. |
| [4] | Qu Changhong, Wang Junjie, Wang Kun, Cui Qingyong, Chen Jiangyang, Wang Xinpeng. A Modeling and Simulation Method for Firepower Intelligent Decision-making of Directed Energy System Based on Joint DQN [J]. Journal of System Simulation, 2025, 37(5): 1256-1265. |
| [5] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [6] | Yang Chao, Zheng Ruiqun, Li Zhen, Zhang Hongwei, Tang Yanqun, Li Dongze. Parallel Task Transmission and Processing Optimization Scheme for UAV-assisted Internet of Vehicles [J]. Journal of System Simulation, 2025, 37(3): 635-645. |
| [7] | Hu Shijun, Liu Hailiang, Wang Binglei, Su Wenke. Quadrotor UAV Path Planning Based on Rapidly-exploration Directional Tree Algorithm [J]. Journal of System Simulation, 2025, 37(2): 311-324. |
| [8] | Peng Yi, Lei Yunkui, Yang Qingqing, Li Hui, Wang Jianming. Improved PID Search Algorithm for UAV Path Planning in Mountainous Environments [J]. Journal of System Simulation, 2025, 37(12): 3075-3086. |
| [9] | Li Boning, Chen Ming, Qi Shuchang, Meng Haoran, Wang Lei. Attitude Control of Quadrotor UAV Based on Disturbance Observer and Command Filtering [J]. Journal of System Simulation, 2025, 37(11): 2793-2803. |
| [10] | Liang Xiuman, Liu Ziliang, Liu Zhendong. Path Planning of Improved RRT Algorithm Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(10): 2578-2593. |
| [11] | Huang Zhiqin, Lu Tianying, Chen Zheyi. Multi-UAV Deployment and Collaborative Offloading for Large-scale IoT Systems [J]. Journal of System Simulation, 2025, 37(1): 25-39. |
| [12] | Yin Anlin, Zhang Zhuhong. UAV Path Planning in Complex Environments and Its Improved Artificial Rabbits Optimization Algorithm [J]. Journal of System Simulation, 2025, 37(1): 79-94. |
| [13] | Li Erchao, Zhang Shenghui. UAV Online Track Planning Based on DMOEA-APTC Algorithm [J]. Journal of System Simulation, 2024, 36(9): 2086-2099. |
| [14] | Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(8): 1843-1853. |
| [15] | Huang Zhifeng, Liu Yuanhua. UAV Path Planning Based on Improved Harris Hawk Algorithm and B-spline Curve [J]. Journal of System Simulation, 2024, 36(7): 1509-1524. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
