

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (3): 595-607.doi: 10.16182/j.issn1004731x.joss.22-1252
• Papers • Previous Articles Next Articles
Li Gaoyang( ), Li Xiangfeng(), Zhao Kang, Jin Yuchao, Yi Zhidong, Zuo Dunwen
), Li Xiangfeng(), Zhao Kang, Jin Yuchao, Yi Zhidong, Zuo Dunwen
Received:2022-10-19
Revised:2023-01-07
Online:2024-03-15
Published:2024-03-14
Contact:
Li Xiangfeng
E-mail:a78989@qq.com;fxli@nuaa.edu.com
CLC Number:
Li Gaoyang, Li Xiangfeng, Zhao Kang, Jin Yuchao, Yi Zhidong, Zuo Dunwen. Three-Dimensional Path Planning of UAV Based on All Particles Driving Wild Horse Optimizer Algorithm[J]. Journal of System Simulation, 2024, 36(3): 595-607.
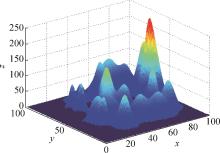
Fig. 1
Environment model
Fig. 2
Cubic B-spline interpolation
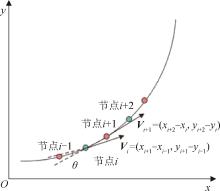
Fig. 3
Yaw angle
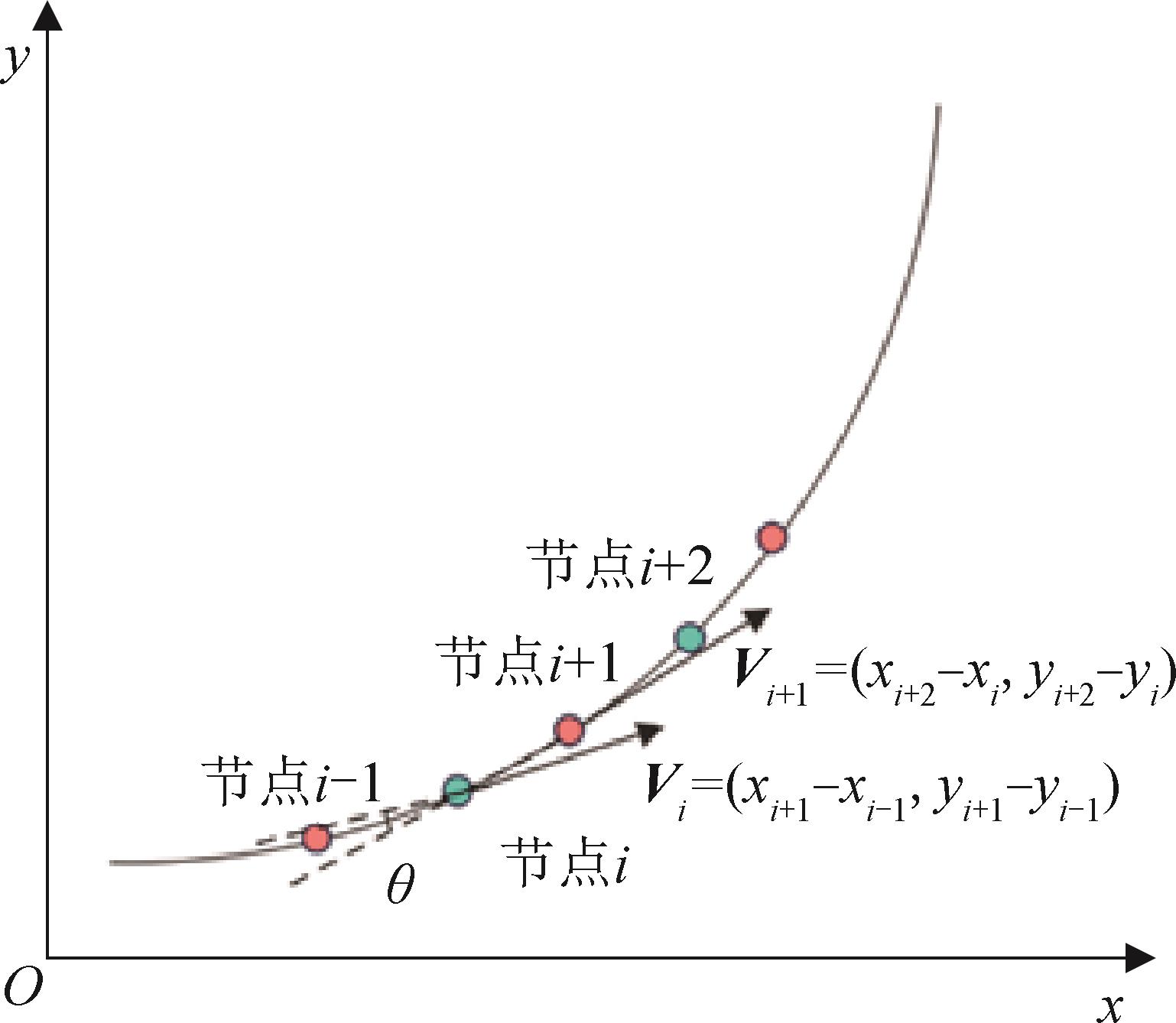
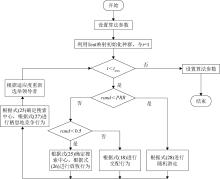
Fig. 4
Algorithm flowchart
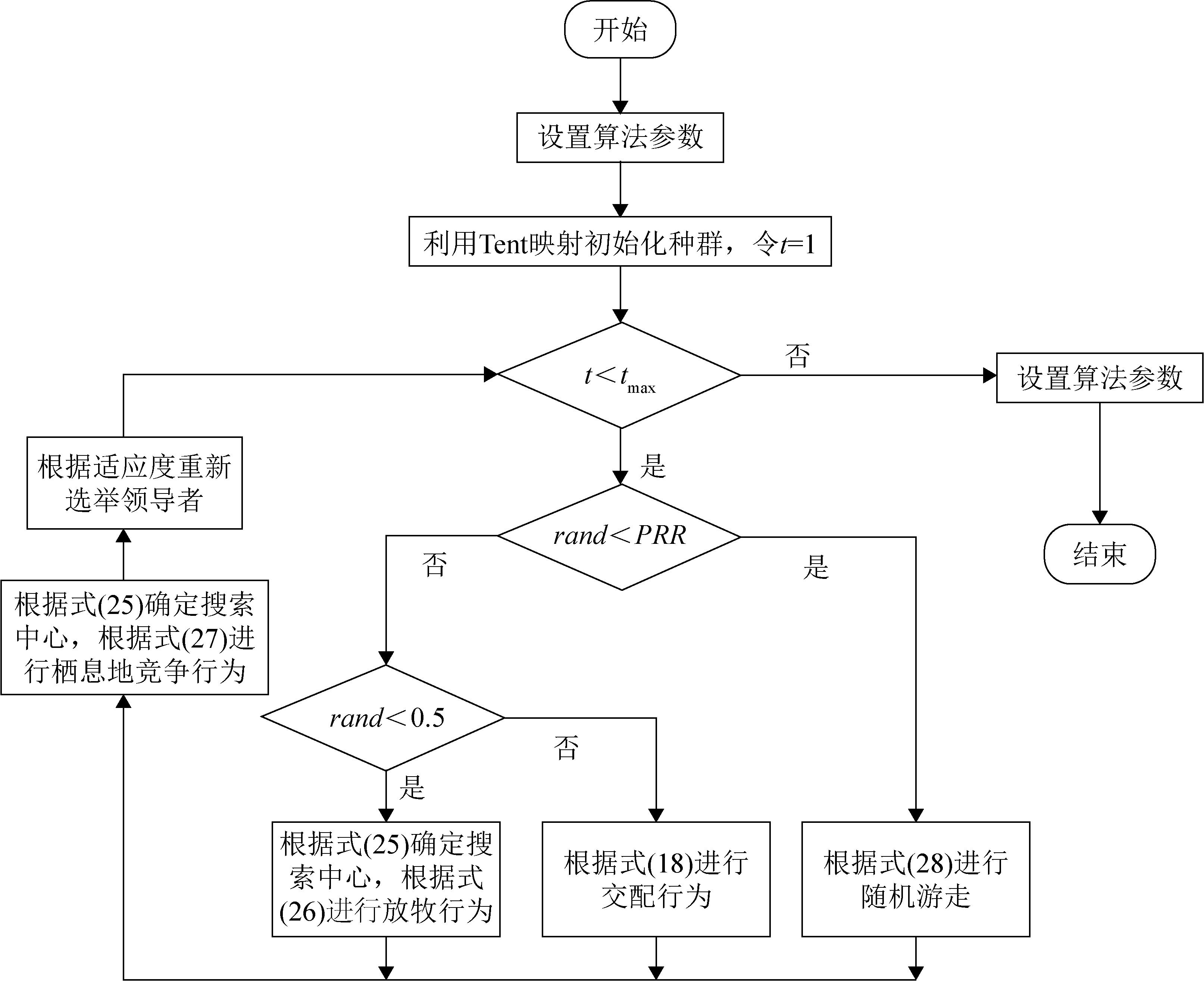
Table 1
Test function
| 测试函数 | 区间 | 最小值 |
|---|---|---|
| [-100,100] | 0 | |
| [-10,10] | 0 | |
| [-100,100] | 0 | |
| [-100,100] | 0 | |
| [-30,30] | 0 | |
| [-100,100] | 0 | |
| [-1.28,1.28] | 0 | |
| [-500,500] | -12 569.5 | |
| [-5.12,5.12] | 0 | |
| [-32,32] | 0 | |
| [-600,600] | 0 | |
| [-50,50] | 0 | |
| [-50,50] | 0 |
Table 2
Initial value of algorithm parameter
| 算法 | 参数 | 取值 |
|---|---|---|
| WHO | 交叉概率 | 0.13 |
| 领导者比例 | 0.2 | |
| 交叉方式 | Mean | |
| APDWHO | 交叉概率 | 0.13 |
| 领导者比例 | 0.2 | |
| 交叉方式 | Mean | |
放牧行为置信因子 栖息地竞争行为 置信因子 | 8 1 | |
| 随机游走概率 | 0.1 | |
| PSO | 拓扑结构 | 全连接 |
| 个体认知/社会认知 | 2 | |
| 惯性权重 | ω∈[0.4,0.9] | |
| GA | 方式 | 实数编码 |
| 选择方式 | 轮盘赌 | |
| 交叉概率 | 0.8 | |
| 变异概率 | 0.3 | |
| GWO | 收敛参数 | 由2线性减少到0 |
| SSA | 领导者位置更新概率 | 0.5 |
Table 3
Algorithm test results
| 函数 | 指标 | PSO | GA | GWO | SSA | WHO | APDWHO |
|---|---|---|---|---|---|---|---|
| f1(x) | Min | 6.485 1E-08 | 1.342 2E+00 | 5.923 0E-30 | 2.499 2E-08 | 1.295 4E-51 | 0.000 0E+00 |
| Max | 1.178 1E-04 | 9.464 9E+00 | 2.002 4E-26 | 1.747 3E-06 | 9.508 9E-43 | 4.331 2E-270 | |
| Avg | 7.613 1E-06 | 1.886 1E+00 | 1.602 1E-27 | 2.079 6E-07 | 3.736 8E-44 | 4.337 7E-272 | |
| Std | 3.253 1E-05 | 3.432 0E+00 | 2.820 2E-27 | 2.989 9E-07 | 1.739 5E-43 | 0.000 0E+00 | |
| Rank | 5 | 6 | 3 | 4 | 2 | 1 | |
| f2(x) | Min | 5.236 0E-05 | 3.535 0E-01 | 1.297 6E-17 | 1.024 4E-03 | 1.415 3E-28 | 1.211 7E-166 |
| Max | 3.140 2E-01 | 6.546 7E-01 | 2.939 6E-16 | 7.390 8E+00 | 6.327 8E-23 | 4.013 8E-125 | |
| Avg | 1.650 3E-02 | 4.654 3E-01 | 9.798 5E-17 | 1.925 6E+00 | 3.473 8E-24 | 4.013 8E-127 | |
| Std | 6.401 2E-02 | 8.453 5E-2 | 6.846 0E-17 | 1.560 8E+00 | 1.316 4E-23 | 4.013 8E-126 | |
| Rank | 4 | 5 | 3 | 6 | 2 | 1 | |
| f 3(x) | Min | 5.785 0E+01 | 2.744 3E+03 | 1.743 1E-08 | 2.785 2E+02 | 1.891 4E-34 | 1.368 2E-137 |
| Max | 3.978 4E+02 | 9.543 0E+03 | 8.911 5E-04 | 5.633 5E+03 | 6.607 0E-24 | 2.228 1E-78 | |
| Avg | 1.506 1E+02 | 4.543 2E+03 | 3.135 7E-05 | 1.621 4E+03 | 2.986 6E-25 | 2.237 8E-80 | |
| Std | 8.789 1E+01 | 1.345 3E+03 | 1.293 61E-04 | 9.399 0E+02 | 1.237 4E-24 | 2.22 8E-79 | |
| Rank | 4 | 6 | 3 | 5 | 2 | 1 | |
| f 4(x) | Min | 7.610 2E-01 | 5.045 3E+00 | 7.799 9E-08 | 4.049 5E+00 | 8.390 1E-2 | 2.681 1E-144 |
| Max | 4.754 1E+00 | 1.434 5E+01 | 8.354 3E-06 | 2.009 6E+01 | 1.032 0E-15 | 4.088 4E-65 | |
| Avg | 2.501 2E+00 | 8.854 2E+00 | 9.004 8E-07 | 1.128 1E+01 | 5.111 3E-17 | 4.089 2E-67 | |
| Std | 7.541 4E-01 | 2.543 7E+00 | 1.088 9E-06 | 3.323 7E+00 | 1.906 8E-16 | 4.088 3E-66 | |
| Rank | 4 | 5 | 3 | 6 | 2 | 1 | |
| f5(x) | Min | 1.359 9E+01 | 1.241 3E+02 | 2.584 6E+01 | 2.639 5E+01 | 2.545 4E+01 | 2.667 3E+01 |
| Max | 1.589 4E+02 | 1.242 9E+03 | 2.874 8E+01 | 2.049 2E+03 | 8.208 7E+01 | 2.788 3E+01 | |
| Avg | 4.907 3E+01 | 3.986 7E+02 | 2.705 4E+01 | 2.990 4E+02 | 2.884 9E+01 | 2.644 3E+01 | |
| Std | 3.448 6E+01 | 2.322 1E+02 | 7.638 0E-01 | 4.376 6E+02 | 1.013 5E+01 | 2.004 9E-01 | |
| Rank | 4 | 6 | 2 | 5 | 3 | 1 | |
| f 6(x) | Min | 9.284 7E-08 | 1.576 3E+00 | 1.265 8E-04 | 1.480 8E-08 | 7.585 6E-06 | 2.181 4E-06 |
| Max | 1.621 4E-05 | 1.398 9E+01 | 2.002 2E+00 | 2.341 2E-06 | 3.289 0E-01 | 3.769 1E-05 | |
| Avg | 1.887 3E-06 | 4.457 3E+00 | 7.833 2E-01 | 2.128 6E-07 | 1.420 0E-02 | 1.076 6E-05 | |
| Std | 2.934 6E-06 | 2.568 0E+00 | 3.672 7E-01 | 3.204 9E-07 | 6.010 0E-02 | 6.752 3E-06 | |
| Rank | 2 | 6 | 5 | 1 | 4 | 3 | |
| f 7(x) | Min | 1.210 0E-02 | 4.500 0E-02 | 4.026 0E-04 | 4.444 9E-02 | 5.168 4E-05 | 1.123 3E-04 |
| Max | 4.080 0E-02 | 2.489 0E-01 | 8.670 5E-03 | 4.614 5E-01 | 9.600 0E-03 | 3.270 5E-03 | |
| Avg | 2.380 0E-02 | 1.302 0E-01 | 2.050 2E-03 | 1.671 1E-01 | 1.300 0E-03 | 8.813 9E-04 | |
| Std | 8.200 0E-03 | 4.040 0E-02 | 1.206 3E-03 | 7.759 6E-02 | 1.700 0E-03 | 5.601 8E-04 | |
| Rank | 4 | 5 | 3 | 6 | 2 | 1 | |
| F 8(x) | Min | 2.116 4E+00 | -1.145 7E+04 | -7.835 4E+03 | -9.807 1E+03 | -1.049 1E+04 | -1.065 4E+04 |
| Max | 2.116 4E+00 | -1.024 9E+04 | -4.287 3E+03 | -5.697 3E+03 | -7.939 7E+03 | -7.327 8E+03 | |
| Avg | 2.116 4E+00 | -1.023 4E+04 | -5.988 9E+03 | -7.471 9E+03 | -9.024 7E+03 | -9.110 4E+03 | |
| Std | 2.116 4E+00 | 3.342 4E+02 | 7.0599 E+02 | 7.642 6E+02 | 6.513 2E+02 | 5.515 5E+02 | |
| Rank | 6 | 1 | 5 | 4 | 3 | 2 | |
| F 9(x) | Min | 2.143 2E+00 | 3.423 2E+00 | 0.000 0E+00 | 1.492 4E+01 | 0.000 0E+00 | 0.000 0E+00 |
| Max | 1.096 4E+02 | 1.249 8E+01 | 2.001 5E+01 | 1.094 4E+02 | 3.386 6E-07 | 0.000 0E+00 | |
| Avg | 4.814 4E+01 | 8.022 9E+00 | 2.882 7E+00 | 5.652 1E+01 | 1.369 4E-08 | 0.000 0E+00 | |
| Std | 2.156 4E+01 | 2.005 6E+00 | 4.214 0E+00 | 1.631 8E+01 | 6.277 3E-08 | 0.000 0E+00 | |
| Rank | 5 | 4 | 3 | 6 | 2 | 1 | |
| F 10(x) | Min | 9.496 6E-05 | 2.234 0E-01 | 6.483 7E-14 | 8.323 9E-02 | 8.8818E-16 | 8.881 8e-16 |
| Max | 2.322 2E+00 | 1.653 2E+00 | 1.501 1E-13 | 5.412 6E+00 | 4.4409E-15 | 4.440 9e-15 | |
| Avg | 1.134 6E+00 | 8.003 4E-01 | 1.037 7E-13 | 2.646 2E+00 | 1.5987E-15 | 4.014 6e-15 | |
| Std | 8.146 1E-01 | 4.271 3E-01 | 1.917 5E-14 | 9.145 9E-01 | 1.4454E-15 | 1.160 3e-15 | |
| Rank | 5 | 4 | 3 | 6 | 1 | 2 | |
| F 11(x) | Min | 9.613 3E-08 | 8.514 0E-01 | 0.000 0E+00 | 4.637 0E-04 | 0.0000E+00 | 0.000 0E+00 |
| Max | 2.121 0E-01 | 1.057 2E+00 | 3.196 4E-02 | 6.416 9E-02 | 0.0000E+00 | 0.000 0E+00 | |
| Avg | 2.852 0E-02 | 1.015 9E+00 | 2.944 2E-03 | 1.838 7E-02 | 0.0000E+00 | 0.000 0E+00 | |
| Std | 4.320 0E-02 | 5.370 0E-02 | 6.742 4E-03 | 1.271 3E-02 | 0.0000E+00 | 0.000 0E+00 | |
| Rank | 5 | 6 | 3 | 4 | 1.5 | 1.5 | |
| F 12(x) | Min | 1.117 6E-08 | 3.600 0E-03 | 1.265 2E-02 | 1.132 9E+00 | 1.0591E-05 | 6.474 3E-08 |
| Max | 5.153 0E-01 | 2.267 0E-01 | 2.849 1E-01 | 2.548 2E+01 | 1.0420E-01 | 1.945 8E-06 | |
| Avg | 5.823 0E-02 | 3.408 0E-02 | 4.739 3E-02 | 8.270 6E+00 | 1.0600E-02 | 4.065 2E-07 | |
| Std | 1.114 0E-01 | 4.698 0E-02 | 3.213 0E-02 | 3.800 1E+00 | 3.1600E-02 | 3.037 9E-07 | |
| Rank | 5 | 4 | 2 | 6 | 3 | 1 | |
| F13(x) | Min | 7.397 7E-08 | 1.436 9E-01 | 1.034 7E-01 | 2.178 2E-02 | 3.1600E-02 | 1.288 2E-06 |
| Max | 2.422 3E-01 | 7.533 0E-01 | 1.288 7E+00 | 6.058 6E+01 | 4.6828E-06 | 1.100 0E-02 | |
| Avg | 1.850 0E-02 | 3.460 0E-01 | 6.291 6E-01 | 1.730 0E+01 | 1.6370E-01 | 7.808 1E-04 | |
| Std | 4.447 0E-02 | 1.383 0E-01 | 2. 181 6E-01 | 1.517 4E+01 | 3.4000E-02 | 3.157 7E-03 | |
| Rank | 2 | 4 | 5 | 6 | 3 | 1 |
Table 4
Performance indexes of each algorithm
| 环境模型 | 测试设置 | 指标 | GA | PSO | SRM-PSO | WHO | APDWHO | |
|---|---|---|---|---|---|---|---|---|
| 30峰 | 种群规模 | 100 | 最优值 | 181.36 | 163.34 | 162.29 | 162.52 | 162.42 |
| 平均值 | 207.93 | 175.42 | 166.29 | 179.32 | 166.17 | |||
| 迭代次数 | 30 | 方差 | 50.64 | 9.21 | 4.21 | 15.49 | 4.19 | |
| 有效路径率/% | 100 | 100 | 100 | 100 | 100 | |||
| 收敛到200适应度平均用时/s | — | 5.72 | 6.41 | 14.12 | 6.37 | |||
| 40峰 | 种群规模 | 100 | 最优值 | 192.73 | 182.09 | 181.06 | 180.40 | 180.84 |
| 平均值 | 43 062.78 | 70 986.66 | 53 179.16 | 19 461.87 | 185.97 | |||
| 迭代次数 | 100 | 方差 | 71 715.43 | 89 461.54 | 61130.46 | 11.03 | 5.17 | |
| 有效路径率/% | 76 | 56 | 67 | 93 | 100 | |||
| 收敛到220适应度平均用时/s | — | — | — | — | 12.62 | |||
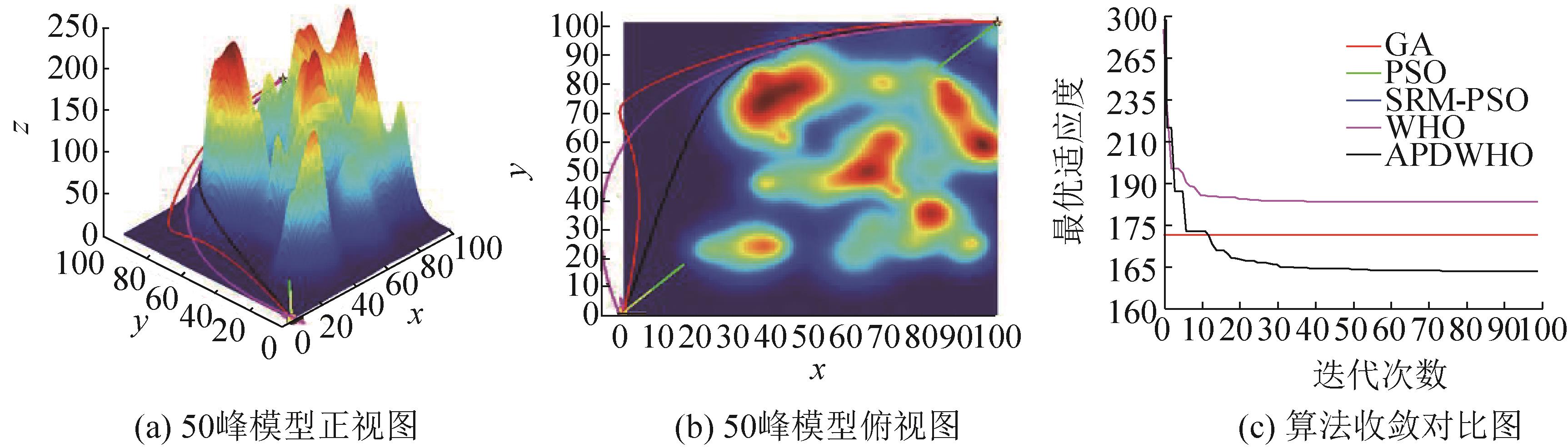
| 50峰 | 种群规模 | 100 | 最优值 | 187.76 | 180.58 | 179.40 | 179.35 | 179.36 |
| 平均值 | 17 752.22 | 74 209.84 | 64 432.96 | 26 154.86 | 180.60 | |||
| 迭代次数 | 100 | 方差 | 21 046.31 | 96 072.86 | 79 053.39 | 9.00 | 0.83 | |
| 有效路径率/% | 90 | 54 | 60 | 85 | 100 | |||
| 收敛到220适应度平均用时/s | — | — | — | — | 7.31 | |||

Fig. 5
Environment model with 30 peaks for testing
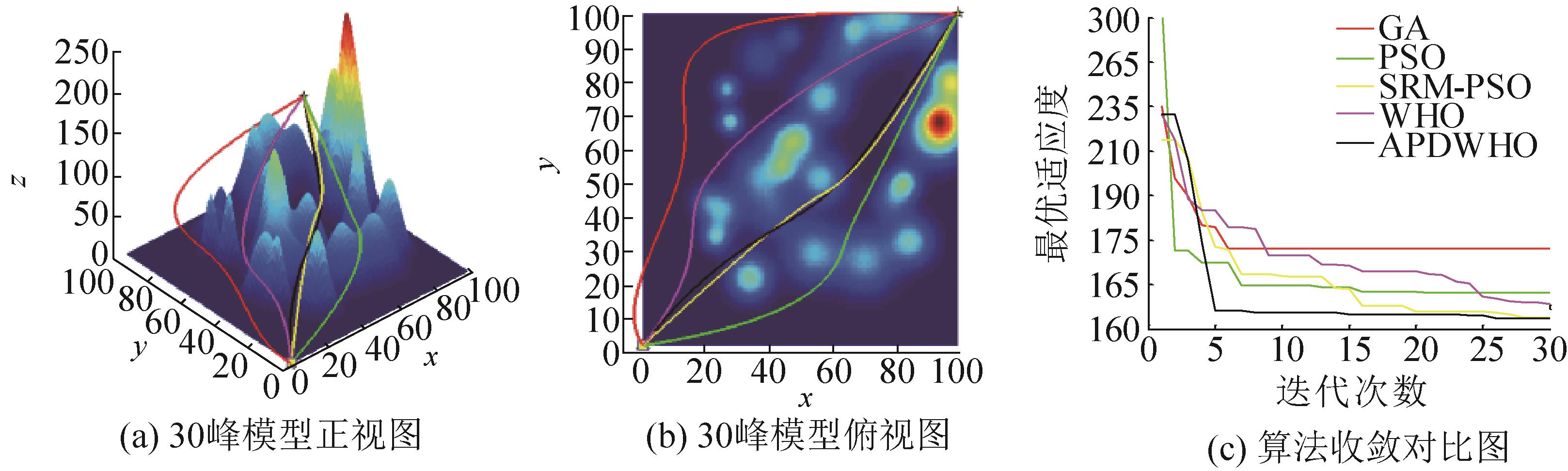

Fig. 6
Environment model with 40 peaks for testing
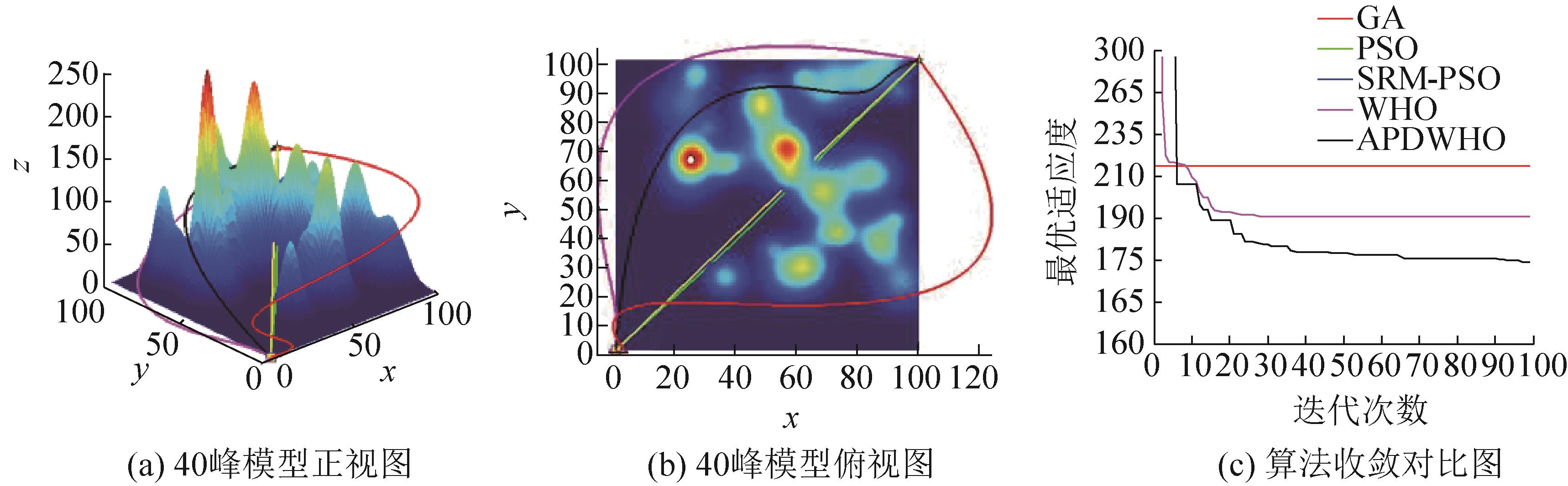

Fig. 7
Environment model with 50 peaks for testing
| 1 | 付兴武, 胡洋. 基于改进粒子群算法的三维路径规划[J]. 电光与控制, 2021, 28(3): 86-89. |
| Fu Xingwu, Hu Yang. Three-Dimensional Path Planning Based on Improved PSO Algorithm[J]. Electronics Optics & Control, 2021, 28(3): 86-89. | |
| 2 | 刘光才, 马寅松, 齐福强, 等. 基于改进A*-人工势场法的城市物流无人机路径规划[J]. 飞行力学, 2022, 40(6): 16-23. |
| Liu Guangcai, Ma Yinsong, Qi Fuqiang, et al. Flight Path Planning for Urban Logistics UAV Based on Improved A*-APF Algorithm[J]. Flight Dynamics, 2022, 40(6): 16-23. | |
| 3 | 詹京吴, 黄宜庆. 融合安全A*算法与动态窗口法的机器人路径规划[J]. 计算机工程, 2022, 48(9): 105-112, 120. |
| Zhan Jingwu, Huang Yiqing. Path Planning of Robot Combing Safety A* Algorithm and Dynamic Window Approach[J]. Computer Engineering, 2022, 48(9): 105-112, 120. | |
| 4 | 蔡旻, 薛杰, 高涵文, 等. 基于成本函数优化的柔性针RRT路径规划算法[J]. 计算机应用与软件, 2022, 39(11): 245-249, 296. |
| Cai Min, Xue Jie, Gao Hanwen, et al. Flexible Needle Rrt Path Planning Algorithm Based on Cost Function Optimization[J]. Computer Applications and Software, 2022, 39(11): 245-249, 296. | |
| 5 | 陈法法, 蒋浩, 李振, 等. 基于改进RRT的智能巡检机器人狭窄通道路径规划[J]. 组合机床与自动化加工技术, 2022(10): 40-45. |
| Chen Fafa, Jiang Hao, Li Zhen, et al. Narrow Channel Path Planning of Intelligent Inspection Robot Based on Improved RRT[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(10): 40-45. | |
| 6 | 杨思明, 单征, 曹江, 等. 基于模型的强化学习在无人机路径规划中的应用[J]. 计算机工程, 2022, 48(12): 255-260, 269. |
| Yang Siming, Shan Zheng, Cao Jiang, et al. Application of Model-based Reinforcement Learning in Path Planning of Unmanned Aerial Vehicle[J]. Computer Engineering, 2022, 48(12): 255-260, 269. | |
| 7 | 李东华, 江驹, 姜长生. 多智能体强化学习飞行路径规划算法[J]. 电光与控制, 2009, 16(10): 10-14. |
| Li Donghua, Jiang Ju, Jiang Changsheng. A Flight Path Planning Algorithm Based on Multi-agent Reinforcement Learning Method[J]. Electronics Optics & Control, 2009, 16(10): 10-14. | |
| 8 | 徐菱, 付文浩, 江文辉, 等. 基于16方向24邻域改进蚁群算法的移动机器人路径规划[J]. 控制与决策, 2021, 36(5): 1137-1146. |
| Xu Ling, Fu Wenhao, Jiang Wenhui, et al. Mobile Robots Path Planning Based on 16-directions 24-neighborhoods Improved Ant Colony Algorithm[J]. Control and Decision, 2021, 36(5): 1137-1146. | |
| 9 | 孔维立, 王峰, 周平华, 等. 改进蚁群算法的无人机三维路径规划[J]. 电光与控制, 2023, 30(3): 63-69. |
| Kong Weili, Wang Feng, Zhou Pinghua, et al. Three-dimensional Path Planning of UAVs Based on Improved Ant Colony Algorithm[J]. Electronics Optics & Control, 2023, 30(3): 63-69. | |
| 10 | 智灵飞(北京)科技有限公司. 一种基于贪心算法的无人机RRT路径优化方法: CN201811477330.4[P]. 2019-03-12. |
| 11 | 刘景森, 吉宏远, 李煜. 基于改进蝙蝠算法和三次样条插值的机器人路径规划[J]. 自动化学报, 2021, 47(7): 1710-1719. |
| Liu Jingsen, Ji Hongyuan, Li Yu. Robot Path Planning Based on Improved Bat Algorithm and Cubic Spline Interpolation[J]. Acta Automatica Sinica, 2021, 47(7): 1710-1719. | |
| 12 | 赵畅, 刘允刚, 陈琳, 等. 面向元启发式算法的多无人机路径规划现状与展望[J]. 控制与决策, 2022, 37(5): 1102-1115. |
| Zhao Chang, Liu Yungang, Chen Lin, et al. Research and Development Trend of Multi-UAV Path Planning Based on Metaheuristic Algorithm[J]. Control and Decision, 2022, 37(5): 1102-1115. | |
| 13 | Mirjalili Seyedali, Seyed Mohammad Mirjalili, Lewis Andrew. Grey Wolf Optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| 14 | Mirjalili Seyedali, Gandomi A H, Seyedeh Zahra Mirjalili, et al. Salp Swarm Algorithm: A Bio-inspired Optimizer for Engineering Design Problems[J]. Advances in Engineering Software, 2017, 114: 163-191. |
| 15 | Naruei Iraj, Keynia Farshid. Wild Horse Optimizer: A New Meta-heuristic Algorithm for Solving Engineering Optimization Problems[J]. Engineering With Computers, 2022, 38(4): 3025-3056. |
| 16 | Zheng Rong, Hussien Abdelazim G, Jia Heming, et al. An Improved Wild Horse Optimizer for Solving Optimization Problems[J]. Mathematics, 2022, 10(8): 1311. |
| 17 | 刘园园, 贺兴时. 基于Tent混沌映射的改进的萤火虫算法[J]. 纺织高校基础科学学报, 2018, 31(4): 511-518. |
| Liu Yuanyuan, He Xingshi. An Improved Firefly Algorithm Based on Tent Chaotic Map[J]. Basic Sciences Journal of Textile Universities, 2018, 31(4): 511-518. | |
| 18 | 周鹏, 董朝轶, 陈晓艳, 等. 基于Tent混沌和透镜成像学习策略的平衡优化器算法[J]. 控制与决策, 2023, 38(6): 1569-1576. |
| Zhou Peng, Dong Zhaoyi, Chen Xiaoyan, et al. An Equilibrium Optimizer Algorithm Based on a Tent Chaos and Lens Imaging Learning Strategy[J]. Control and Decision, 2023, 38(6): 1569-1576. | |
| 19 | 聂春芳. 融合黄金正弦和随机游走的哈里斯鹰优化算法[J]. 智能计算机与应用, 2021, 17(7): 113-119, 123. |
| Nie Chunfang. Harris Hawk Optimization Algorithm Combining Golden Sine and Random Walk[J]. Intelligent Computer and Applications, 2021, 17(7): 113-119, 123. | |
| 20 | 吕鑫, 慕晓冬, 张钧, 等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720. |
| Xin Lü, Mu Xiaodong, Zhang Jun, et al. Chaos Sparrow Search Optimization Algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720. | |
| 21 | Liu Qing, Li Jin, Ren Haipeng, et al. All Particles Driving Particle Swarm Optimization: Superior Particles Pulling Plus Inferior Particles Pushing[J]. Knowledge-Based Systems, 2022, 249: 108849. |
| 22 | Hu Yuntong, Xiao Fuyuan. Network Self Attention for Forecasting Time Series[J]. Applied Soft Computing, 2022, 124: 109092. |
| 23 | She Bin, Fournier Aimé, Yao Mengjie, et al. A Self-adaptive and Gradient-based Cuckoo Search Algorithm for Global Optimization[J]. Applied Soft Computing, 2022, 122: 108774. |
| 24 | Saremi S, Mirjalili S, Lewis A. Grasshopper Optimisation Algorithm: Theory and Application[J]. Advances in Engineering Software, 2017, 105: 30-47. |
| 25 | Mirjalili S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems[J]. Knowledge-Based Systems, 2016, 96: 120-133. |
| 26 | Chen Yanjie, Liang Jinglin, Wu Yangning, et al. Self-regulating and Self-perception Particle Swarm Optimization with Mutation Mechanism[J]. Journal of Intelligent & Robotic Systems, 2022, 105(2): 30. |
| [1] | Xiao Wei, Gao Jiabo, Ke Xueliang. Control Strategy for UAV Cluster Formation Rendezvous Based on LDE-MADDPG Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2335-2351. |
| [2] | Ai Gaohang, Li Chuntao. UAV Swarm Obstacle Avoidance Based on Visual Filed and Adaptive Radius [J]. Journal of System Simulation, 2024, 36(12): 2945-2959. |
| [3] | Wang Ning, Liang Xiaolong, Zhang Jiaqiang, Hou Yueqi, Yang Aiwu. Research on Cross-domain Unmanned Swarm Cooperative Anti-submarine Search Method [J]. Journal of System Simulation, 2024, 36(4): 817-824. |
| [4] | Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance [J]. Journal of System Simulation, 2024, 36(3): 545-554. |
| [5] | Songming Jiao, Hui Ding, Yufei Zhong, Xin Yao, Jiahao Zheng. A UAV Target Tracking and Control Algorithm Based on SiamRPN [J]. Journal of System Simulation, 2023, 35(6): 1372-1380. |
| [6] | Zhao Jing, Wang Peng, Ding Xiaoqian, Jiang Guoping, Xu Fengyu, Sun Yanfei. Fault Tolerant Control and Simulation of Quadrotor Based on Adaptive Observer [J]. Journal of System Simulation, 2022, 34(1): 1-10. |
| [7] | Wang Biao, Tang Chaoying, Kong Daqing. Quadrotor Attitude Control Based on an Improved ADRC [J]. Journal of System Simulation, 2018, 30(8): 3124-3129. |
| [8] | Zhang Zhiwei, Tao Jianwu, Shao Xiao. Analysis of UAS Avoidance Warning Criteria Based on "τ-τ" [J]. Journal of System Simulation, 2018, 30(5): 1877-1885. |
| [9] | Wu Huaxing, Huang Wei, Kang Fengju, Mao Hongbao. Research on Autonomous Intercept Method for UCAV Based on Lead Attack Aiming [J]. Journal of System Simulation, 2016, 28(9): 2246-2253. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
