

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (8): 1843-1853.doi: 10.16182/j.issn1004731x.joss.23-0993
• Papers • Previous Articles Next Articles
Liu Bin1, Lan Ying2, Huang Wentao3, Fan Qinqin1
Received:2023-08-01
Revised:2023-10-19
Online:2024-08-15
Published:2024-08-19
Contact:
Fan Qinqin
CLC Number:
Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach[J]. Journal of System Simulation, 2024, 36(8): 1843-1853.
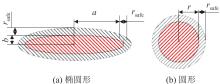
Fig. 1
Elliptical obstacle model
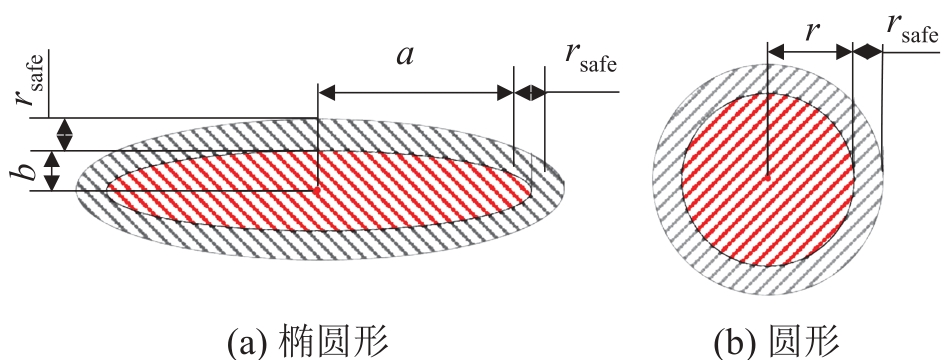

Fig. 2
Elliptical tangent graph method
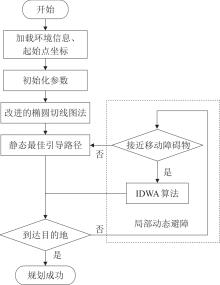
Fig. 3
Framework of UAV-DPPA-DWA algorithm
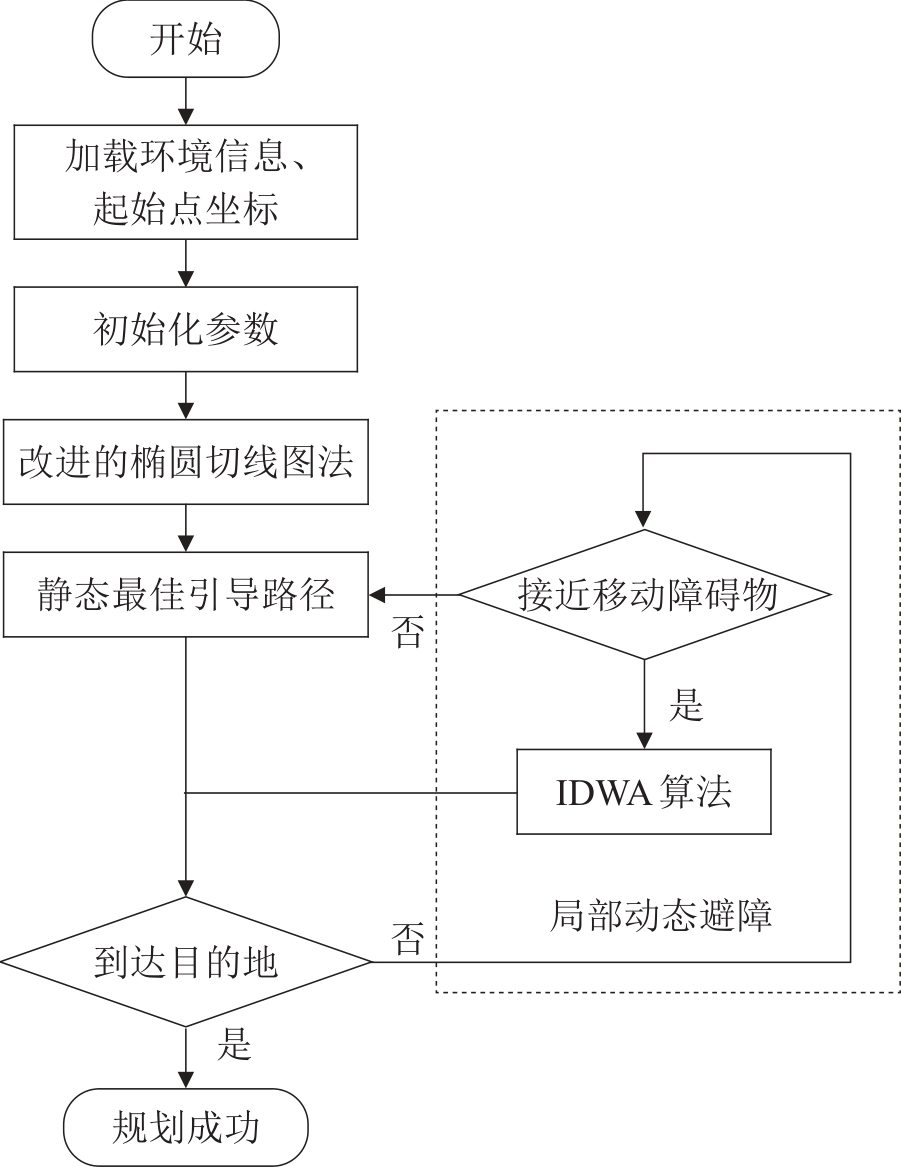

Fig. 4
Five types of layout scenarios
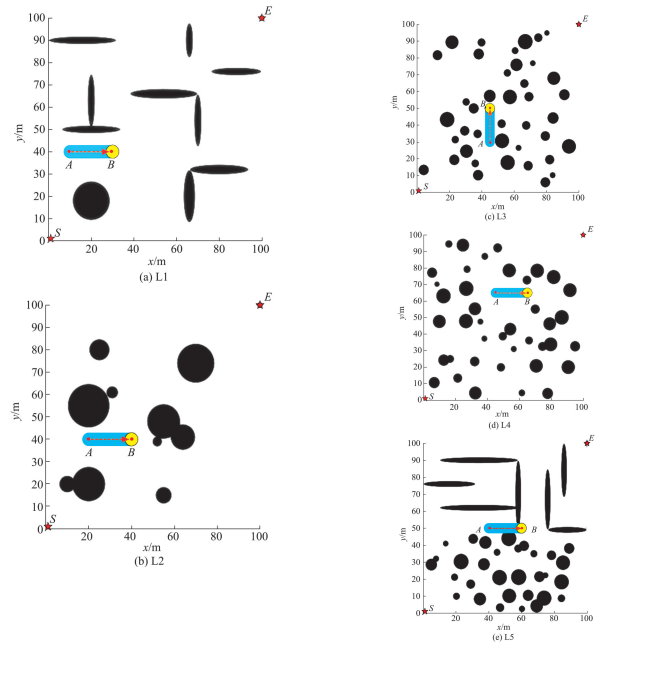
Table 1
Parameters of experimental environments
| 环境 | 布局 | 障碍物数量 | 起点S | 终点E |
|---|---|---|---|---|
| E1 | L1 | 11 | (1,1) | (100,100) |
| E2 | L2 | 11 | (1,1) | (100,100) |
| E3 | L3 | 41 | (1,1) | (100,100) |
| E4 | L4 | 41 | (1,1) | (100,100) |
| E5 | L3 | 61 | (1,1) | (100,100) |
| E6 | L4 | 61 | (1,1) | (100,100) |
| E7 | L3 | 81 | (1,1) | (100,100) |
| E8 | L4 | 81 | (1,1) | (100,100) |
| E9 | L5 | 39 | (1,1) | (100,100) |
| E10 | L5 | 59 | (1,1) | (100,100) |
Table 2
Other parameter settings
| 参数 | 取值 |
|---|---|
| 最大线速度/(m/s) | 2 |
| 最小线速度/(m/s) | 0 |
| 最大角速度/((°)/s) | 60 |
| 最小角速度/((°)/s) | 0 |
| 线加速度/(m/s2) | 0.5 |
| 角加速度/((°)/s2) | 90 |
| 线速度分辨率/(m/s) | 0.1 |
| 旋转角速度分辨率/((°)/s) | 2 |
| 安全距离/m | 0.5 |
| 模拟预测时间/s | 1 |
| 单位时间Δt/s | 0.5 |
| 窗口探测范围/m | 5 |
Table 3
Experimental results obtained by UAV-DDPA-DWA and other compared algorithms
| 环境 | 路径长度/m | 航行时间/s | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| DWA | A*-DWA | RRT-DWA | PRM-DWA | UAV-DDPA-DWA | DWA | A*-DWA | RRT-DWA | PRM-DWA | UAV-DDPA-DWA | ||
| E1 | Mean | — | 156.30 | 175.02 | 183.68 | 146.62 | — | 34.22 | 38.85 | 42.49 | 15.07 |
| SD | — | 0 | 9.48 | 5.27 | 0 | — | 0.85 | 2.49 | 2.90 | 0.62 | |
| E2 | Mean | 164.84 | 150.22 | 159.36 | 155.69 | 147.81 | 36.67 | 31.63 | 34.95 | 34.44 | 32.47 |
| SD | 0 | 0 | 3.84 | 2.96 | 0 | 1.32 | 0.26 | 2.54 | 1.82 | 0.73 | |
| E3 | Mean | 178.86 | 153.40 | 158.64 | 154.77 | 140.88 | 116.56 | 89.93 | 94.28 | 95.10 | 24.66 |
| SD | 0 | 0 | 5.03 | 1.88 | 0 | 8.45 | 1.41 | 3.76 | 4.41 | 0.24 | |
| E4 | Mean | 158.98 | 162.85 | 156.02 | 164.05 | 141.12 | 112.79 | 97.22 | 94.06 | 98.18 | 52.31 |
| SD | 0 | 0 | 5.79 | 4.89 | 0 | 1.97 | 0.90 | 5.55 | 2.75 | 0.85 | |
| E5 | Mean | 176.43 | 162.06 | 155.04 | 158.44 | 141.66 | 157.96 | 147.23 | 140.16 | 147.42 | 78.58 |
| SD | 0 | 0 | 1.85 | 2.90 | 0 | 2.96 | 2.67 | 3.37 | 2.15 | 0.54 | |
| E6 | Mean | 187.72 | 152.26 | 163.70 | 157.20 | 144.42 | 167.95 | 132.63 | 140.98 | 141.80 | 90.94 |
| SD | 0 | 0 | 4.44 | 2.48 | 0 | 1.70 | 1.49 | 5.84 | 2.51 | 0.40 | |
| E7 | Mean | 182.63 | 157.84 | 162.41 | 160.61 | 141.35 | 207.19 | 182.36 | 183.05 | 199.24 | 43.66 |
| SD | 0 | 0 | 3.65 | 2.68 | 0 | 4.49 | 0.57 | 4.54 | 5.32 | 1.52 | |
| E8 | Mean | 171.39 | 157.71 | 161.92 | 172.86 | 143.38 | 321.19 | 255.00 | 221.54 | 203.68 | 113.33 |
| SD | 0 | 0 | 2.22 | 2.85 | 0 | 9.18 | 1.57 | 3.72 | 5.41 | 0.76 | |
| E9 | Mean | — | 222.47 | 209.05 | — | 170.34 | — | 156.28 | 121.52 | — | 23.95 |
| SD | — | 0 | 3.75 | — | 0 | — | 2.46 | 5.35 | — | 0.12 | |
| E10 | Mean | — | — | 214.33 | — | 171.29 | — | — | 208.09 | — | 86.54 |
| SD | — | — | 3.37 | — | 0 | — | — | 3.30 | — | 0.62 | |

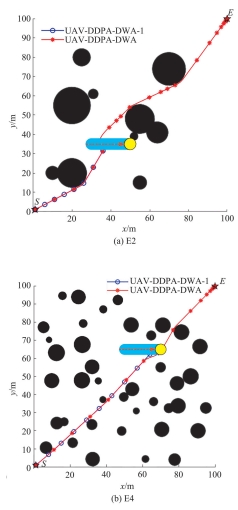
Fig. 5
Flight paths of all compared algorithms

Table 4
Experimental results of SETG-TG and IETG
| 环境 | SETG-TG | IETG |
|---|---|---|
| E2 | 152.833 | 142.770 |
| E3 | 145.890 | 140.940 |
| E4 | 142.012 | 140.150 |
| E5 | 148.580 | 141.69 |
| E6 | 141.966 | 140.95 |

Fig. 6
Flight paths of the proposed algorithm and its variant
| 1 | Xu Cheng, Xu Ming, Yin Chanjuan. Optimized Multi-UAV Cooperative Path Planning Under the Complex Confrontation Environment[J]. Computer Communications, 2020, 162: 196-203. |
| 2 | Xia Zhaoyue, Du Jun, Wang Jingjing, et al. Multi-agent Reinforcement Learning Aided Intelligent UAV Swarm for Target Tracking[J]. IEEE Transactions on Vehicular Technology, 2022, 71(1): 931-945. |
| 3 | Choi Y, Choi Y, Briceno S, et al. Energy-constrained Multi-UAV Coverage Path Planning for an Aerial Imagery Mission Using Column Generation[J]. Journal of Intelligent & Robotic Systems, 2020, 97(1): 125-139. |
| 4 | Duchoň František, Babinec Andrej, Kajan Martin, et al. Path Planning with Modified a Star Algorithm for a Mobile Robot[J]. Procedia Engineering, 2014, 96: 59-69. |
| 5 | Yuan Chengren, Liu Guifeng, Zhang Wenqun, et al. An Efficient RRT Cache Method in Dynamic Environments for Path Planning[J]. Robotics and Autonomous Systems, 2020, 131: 103595. |
| 6 | 李兆强, 张时雨. 基于快速RRT算法的三维路径规划算法研究[J]. 系统仿真学报, 2022, 34(3): 503-511. |
| Li Zhaoqiang, Zhang Shiyu. Research on 3D Path Planning Algorithm Based on Fast RRT Algorithm[J]. Journal of System Simulation, 2022, 34(3): 503-511. | |
| 7 | Ravankar Ankit A, Ravankar Abhijeet, Emaru Takanori, et al. HPPRM: Hybrid Potential Based Probabilistic Roadmap Algorithm for Improved Dynamic Path Planning of Mobile Robots[J]. IEEE Access, 2020, 8: 221743-221766. |
| 8 | 邓向阳, 张立民, 方伟, 等. 基于双向汇聚引导蚁群算法的机器人路径规划[J]. 系统仿真学报, 2022, 34(5): 1101-1108. |
| Deng Xiangyang, Zhang Limin, Fang Wei, et al. Robot Path Planning Based on Bidirectional Aggregation Ant Colony Optimization[J]. Journal of System Simulation, 2022, 34(5): 1101-1108. | |
| 9 | Ajeil Fatin H, Ibraheem Kasim Ibraheem, Sahib Mouayad A, et al. Multi-objective Path Planning of an Autonomous Mobile Robot Using Hybrid PSO-MFB Optimization Algorithm[J]. Applied Soft Computing, 2020, 89: 106076. |
| 10 | Song Baoye, Wang Zidong, Zou Lei. An Improved PSO Algorithm for Smooth Path Planning of Mobile Robots Using Continuous High-degree Bezier Curve[J]. Applied Soft Computing, 2021, 100: 106960. |
| 11 | Liu Yiyang, Yan Shuaihua, Zhao Yang, et al. Improved Dyna-Q: A Reinforcement Learning Method Focused via Heuristic Graph for AGV Path Planning in Dynamic Environments[J]. Drones, 2022, 6(11): 365. |
| 12 | Chen Pengzhan, Pei Jiean, Lu Weiqing, et al. A Deep Reinforcement Learning Based Method for Real-time Path Planning and Dynamic Obstacle Avoidance[J]. Neurocomputing, 2022, 497: 64-75. |
| 13 | Chu Zhenzhong, Wang Fulun, Lei Tingjun, et al. Path Planning Based on Deep Reinforcement Learning for Autonomous Underwater Vehicles Under Ocean Current Disturbance[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(1): 108-120. |
| 14 | Fu Bing, Chen Lin, Zhou Yuntao, et al. An Improved A* Algorithm for the Industrial Robot Path Planning with High Success Rate and Short Length[J]. Robotics and Autonomous Systems, 2018, 106: 26-37. |
| 15 | Zhang Zhen, Wu Defeng, Gu Jiadong, et al. A Path-planning Strategy for Unmanned Surface Vehicles Based on an Adaptive Hybrid Dynamic Stepsize and Target Attractive Force-RRT Algorithm[J]. Journal of Marine Science and Engineering, 2019, 7(5): 132. |
| 16 | Cao Kai, Cheng Qian, Gao Song, et al. Improved PRM for Path Planning in Narrow Passages[C]//2019 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway: IEEE, 2019: 45-50. |
| 17 | Liu Huan, Li Xiamiao, Fan Mingfeng, et al. An Autonomous Path Planning Method for Unmanned Aerial Vehicle Based on a Tangent Intersection and Target Guidance Strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(4): 3061-3073. |
| 18 | Fox D, Burgard W, Thrun S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| 19 | Chang Lu, Shan Liang, Jiang Chao, et al. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment[J]. Autonomous Robots, 2021, 45(1): 51-76. |
| 20 | Zhong Xunyu, Tian Jun, Hu Huosheng, et al. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-scale Dynamic Environment[J]. Journal of Intelligent & Robotic Systems, 2020, 99(1): 65-77. |
| 21 | Han Sen, Wang Lei, Wang Yiting, et al. A Dynamically Hybrid Path Planning for Unmanned Surface Vehicles Based on Non-uniform Theta* and Improved Dynamic Windows Approach[J]. Ocean Engineering, 2022, 257: 111655. |
| 22 | 魏立新, 张钰锟, 孙浩, 等. 基于改进蚁群和DWA算法的机器人动态路径规划[J]. 控制与决策, 2022, 37(9): 2211-2216. |
| Wei Lixin, Zhang Yukun, Sun Hao, et al. Robot Dynamic Path Planning Based on Improved Ant Colony and DWA Algorithm[J]. Control and Decision, 2022, 37(9): 2211-2216. | |
| 23 | Li Yonggang, Jin Rencai, Xu Xiangrong, et al. A Mobile Robot Path Planning Algorithm Based on Improved A* Algorithm and Dynamic Window Approach[J]. IEEE Access, 2022, 10: 57736-57747. |
| 24 | Dai Jun, Li Dongfang, Zhao Junwei, et al. Autonomous Navigation of Robots Based on the Improved Informed-RRT∗ Algorithm and DWA[J]. Journal of Robotics, 2022, 2022(1): 3477265. |
| 25 | Fu Jinyu, Sun Guanghui, Yao Weiran, et al. On Trajectory Homotopy to Explore and Penetrate Dynamically of Multi-UAV[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 24008-24019. |
| 26 | Yu Xiaobing, Li Chenliang, Yen G G. A Knee-guided Differential Evolution Algorithm for Unmanned Aerial Vehicle Path Planning in Disaster Management[J]. Applied Soft Computing, 2021, 98: 106857. |
| 27 | 王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353. |
| Wang Hongbin, Yin Pengheng, Zheng Wei, et al. Mobile Robot Path Planning Based on Improved A* Algorithm and Dynamic Window Method[J]. Robot, 2020, 42(3): 346-353. | |
| 28 | Yang Dian, Su Chen, Wu Hang, et al. Construction of Novel Self-adaptive Dynamic Window Approach Combined with Fuzzy Neural Network in Complex Dynamic Environments[J]. IEEE Access, 2022, 10: 104375-104383. |
| 29 | 张伟龙, 单梁, 常路, 等. 基于改进DWA的多无人水面艇分布式避碰算法[J]. 控制与决策, 2023, 38(4): 951-962. |
| Zhang Weilong, Shan Liang, Chang Lu, et al. Distributed Collision Avoidance Algorithm for Multiple Unmanned Surface Vessels Based on Improved DWA[J]. Control and Decision, 2023, 38(4): 951-962. | |
| 30 | 王永雄, 田永永, 李璇, 等. 穿越稠密障碍物的自适应动态窗口法[J]. 控制与决策, 2019, 34(5): 927-936. |
| Wang Yongxiong, Tian Yongyong, Li Xuan, et al. Self-adaptive Dynamic Window Approach in Dense Obstacles[J]. Control and Decision, 2019, 34(5): 927-936. | |
| 31 | 常路, 单梁, 戴跃伟, 等. 未知环境下基于改进DWA的多机器人编队控制[J]. 控制与决策, 2022, 37(10): 2524-2534. |
| Chang Lu, Shan Liang, Dai Yuewei, et al. Multi-robot Formation Control in Unknown Environment Based on Improved DWA[J]. Control and Decision, 2022, 37(10): 2524-2534. | |
| 32 | Xu Ce, Xu Zhenbang, Xia Mingyi. Obstacle Avoidance in a Three-dimensional Dynamic Environment Based on Fuzzy Dynamic Windows[J]. Applied Sciences, 2021, 11(2): 504. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [7] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [8] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [9] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [10] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [11] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [12] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Qu Changhong, Wang Junjie, Wang Kun, Cui Qingyong, Chen Jiangyang, Wang Xinpeng. A Modeling and Simulation Method for Firepower Intelligent Decision-making of Directed Energy System Based on Joint DQN [J]. Journal of System Simulation, 2025, 37(5): 1256-1265. |
| [15] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
