

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (7): 1509-1524.doi: 10.16182/j.issn1004731x.joss.23-0403
Huang Zhifeng( ), Liu Yuanhua()
), Liu Yuanhua()
Received:2023-04-09
Revised:2023-05-10
Online:2024-07-15
Published:2024-07-12
Contact:
Liu Yuanhua
E-mail:213491529@st.usst.edu.cn;liuyuanhua@st.usst.edu.cn
CLC Number:
Huang Zhifeng, Liu Yuanhua. UAV Path Planning Based on Improved Harris Hawk Algorithm and B-spline Curve[J]. Journal of System Simulation, 2024, 36(7): 1509-1524.
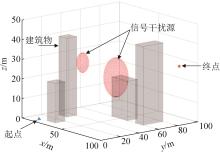
Fig. 1
Three-dimensional space examples
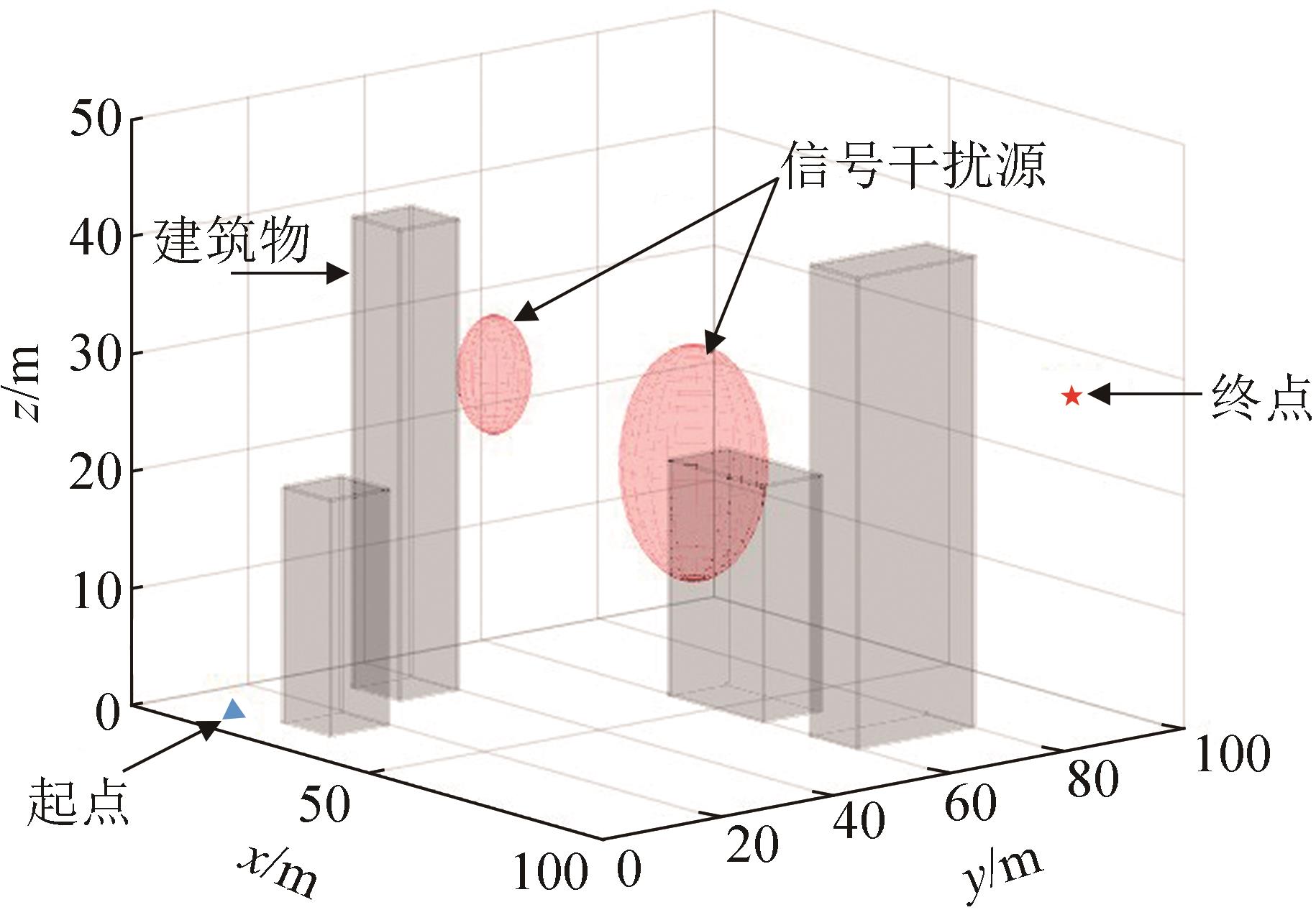
Fig. 2
Dynamic obstacle
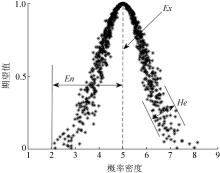
Fig. 3
Normal cloud distribution map
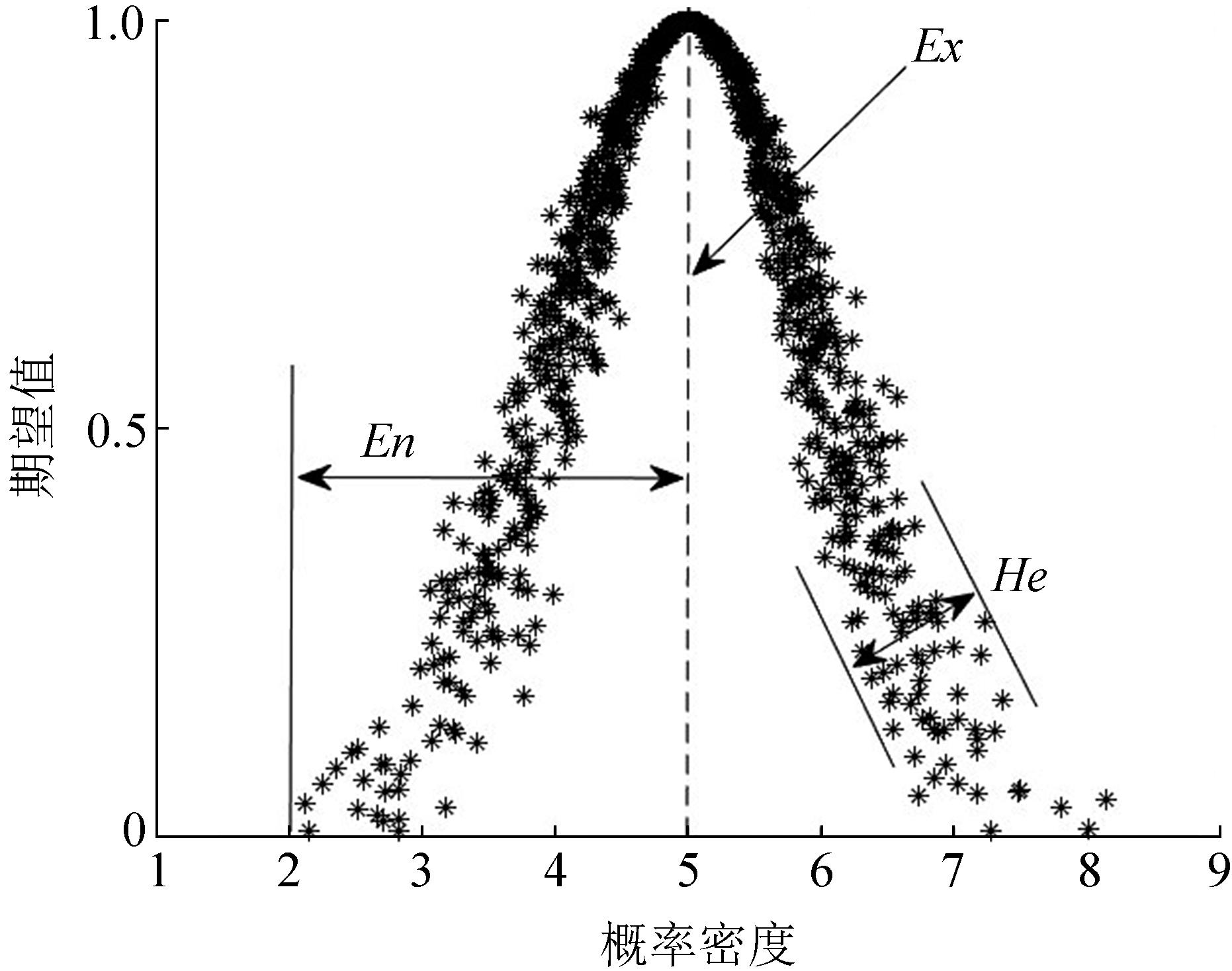
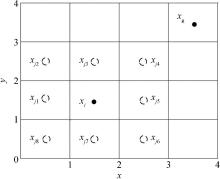
Fig. 4
Two-dimensional node selection
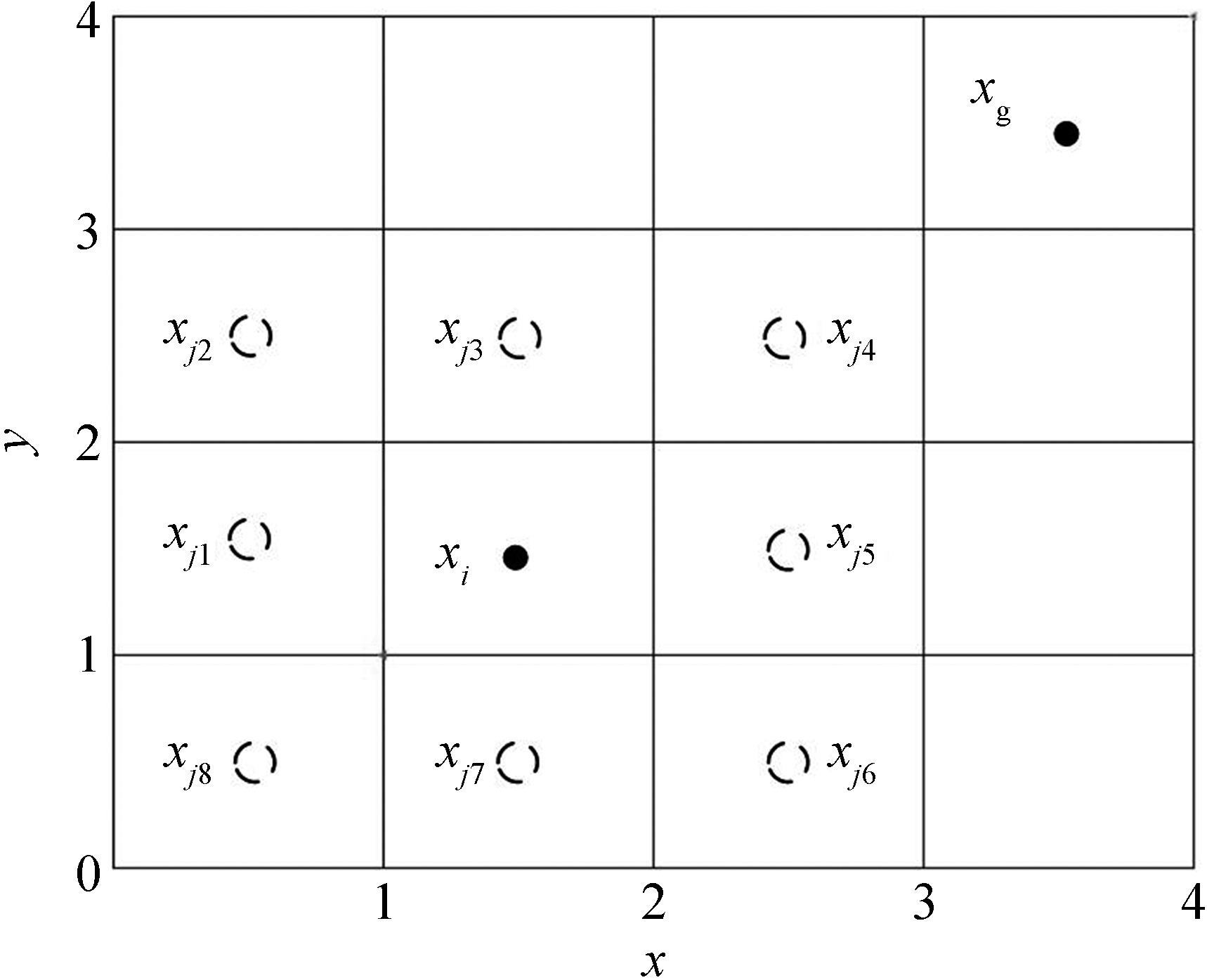
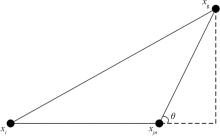
Fig. 5
Included angleθ
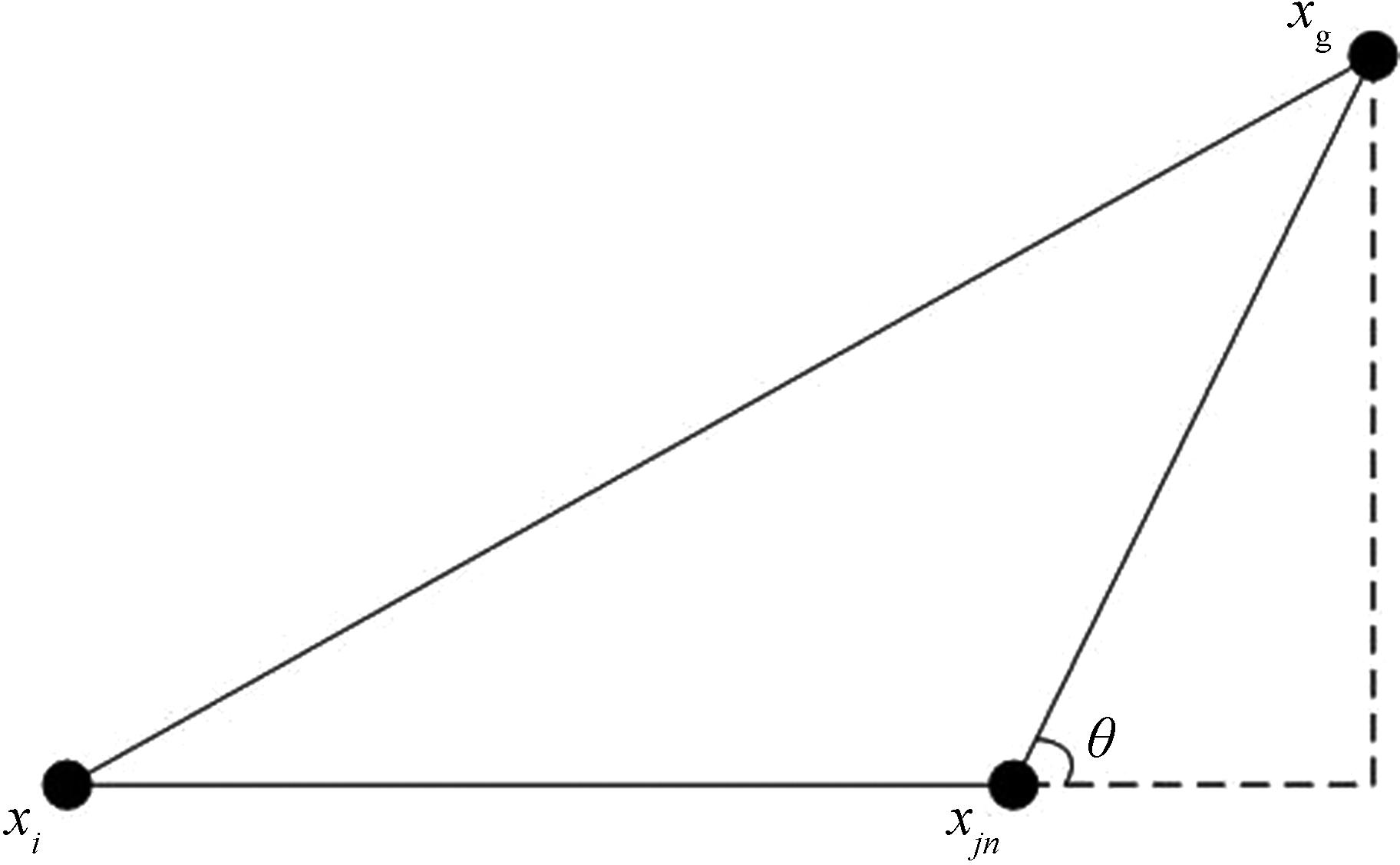

Fig. 6
Valuation function verification

Table 1
International standard test function
| 函数 | 名称 | 取值范围 | 维度 | 最值 |
|---|---|---|---|---|
| Sphere | [-100,100] | n | 0 | |
| Schwefel2.22 | [-10,10] | n | 0 | |
| Schwefel1.2 | [-100,100] | n | 0 | |
| Schwefel2.21 | [-100,100] | n | 0 | |
| Schwefel's 2.26 | [-500,500] | n | -12 569 | |
| Rastrigin | [-5.12,5.12] | n | 0 | |
| Ackley | [-32,32] | n | 0 | |
| Griewank | [-600,600] | n | 0 | |
| Foxholes | [-65,65] | 2 | 0.998 | |
| Kowalik's | [-5,5] | 4 | 3.075e-04 | |
| Six-Hump | [-5,5] | 2 | -1.031 628 | |
| Branin | [-5,5] | 2 | 0.398 |
Table 2
Comparison of test function results
| 函数 | GA | PSO | GWO | HHO | DCSOA-S | GHHO | IHHO | |
|---|---|---|---|---|---|---|---|---|
| ave | 8.57e+02 | 2.60e+03 | 1.11e-31 | 5.11e-96 | 1.71e-152 | 9.08e-186 | 0 | |
| std | 1.84e+02 | 3.31e+03 | 5.02e-31 | 2.79e-95 | 1.86e-156 | 0 | 0 | |
| 4.75e+02 | 2.99e+01 | 5.81e-32 | 3.34e-153 | — | 7.58e-150 | 0 | ||
| ave | 1.01e+02 | 1.51e+02 | 5.30e-09 | 2.69e-49 | 5.21e-108 | 7.77e-105 | 0 | |
| std | 1.39e+01 | 2.45e+01 | 2.80e-09 | 1.45e-48 | 6.13e-108 | 1.11e-104 | 0 | |
| 8.66e+01 | 1.29e+02 | 2.07e-09 | 4.09e-88 | — | 2.24e-131 | 0 | ||
| ave | 4.62e+04 | 9.18e+03 | 1.33e-08 | 2.89e-75 | 1.34e-85 | 4.70e-76 | 0 | |
| std | 1.25e+04 | 8.67e+03 | 1.97e-08 | 1.08e-74 | 4.82e-86 | 2.57e-75 | 0 | |
| 3.09e+04 | 3.23e+03 | 3.09e-09 | 8.70e+03 | — | 5.10e-114 | 0 | ||
| ave | 5.05e+01 | 2.31e+01 | 4.44e-08 | 4.88e-50 | 1.07e-94 | 7.95e-65 | 0 | |
| std | 8.28+00 | 5.16+00 | 5.55e-08 | 1.93e-49 | 2.08e-95 | 3.26e-64 | 0 | |
| 4.01e+01 | 1.71e+01 | 7.11e-09 | 4.86e-10 | — | 2.58e-74 | 0 | ||
| ave | -1.12e+04 | -6.94e+03 | -3.111e+03 | 1.26e+04 | -1.25e+04 | — | -1.25e+04 | |
| std | 2.47e+02 | 1.04e+03 | 3.05e+02 | 9.45e-01 | 0 | — | 0 | |
| -1.17e+04 | -8.05e+03 | -3.68e+03 | -12 567 | — | — | -12 569 | ||
| ave | 5.09e+01 | 1.13e+02 | 0 | 0 | 1.39e-06 | 0 | 0 | |
| std | 1.16e+01 | 3.39e+01 | 0 | 0 | 1.49e-06 | 0 | 0 | |
| 3.48e+01 | 5.36e+01 | 0 | 0 | — | 0 | 0 | ||
| ave | 7.34e+00 | 1.23e+01 | 1.72e-14 | 8.88e-16 | 3.86e-16 | 8.88e-16 | 8.88e-16 | |
| std | 1.29e+00 | 1.81e+00 | 4.49e-15 | 0 | 2.53e-16 | 0 | 0 | |
| 5.07e+00 | 1.00e+01 | 1.15e-14 | 8.88e-16 | — | 8.88e-16 | 8.88e-16 | ||
| ave | 8.36e+00 | 1.77e+01 | 0 | 0 | 5.74e-03 | 0 | 0 | |
| std | 3.02e+00 | 1.01e+01 | 0 | 0 | 5.53e-03 | 0 | 0 | |
| 3.64e+00 | 4.86e+00 | 0 | 0 | — | 0 | 0 | ||
| ave | 9.98e-01 | 1.09e+00 | 8.24e+00 | 1.39e+00 | — | — | 9.98e-01 | |
| std | 3.01e-04 | 3.14e-01 | 3.75e+00 | 9.91e-01 | — | — | 6.35e-10 | |
| 0.998 | 0.998 | 1.04e+00 | 0.998 | — | — | 0.998 | ||
| ave | 1.93e-02 | 3.50e-03 | 2.70e-03 | 3.79e-04 | 3.00e-03 | 4.11e-04 | 3.08e-04 | |
| std | 1.71e-02 | 6.40e-03 | 6.20e-03 | 2.33e-04 | 0 | 1.76e-04 | 0 | |
| 2.20e-03 | 3.07e-04 | 4.54e-04 | 5.96e-04 | — | 3.07e-04 | 3.07e-04 | ||
| ave | -1.02e+00 | -1.03e+00 | -1.03e+00 | -1.03e+00 | -1.03e+00 | -1.03e+00 | 1.03e+00 | |
| std | 4.20e-03 | 1.48e-16 | 1.50e-08 | 4.88e-08 | 0 | 9.63e-09 | 2.95e-04 | |
| -1.031 6 | -1.031 6 | -1.031 6 | -1.031 6 | — | -1.0316 | -1.031 6 | ||
| ave | 4.16e-01 | 3.97e-01 | 3.97e-01 | 3.98e-01 | — | — | 3.97e-01 | |
| std | 2.79e-02 | 0 | 8.91e-07 | 6.68e-04 | — | — | 0 | |
| 0.398 5 | 0.397 9 | 0.397 9 | 0.397 9 | — | — | 0.397 9 |

Fig. 7
Test function convergence curves (part)
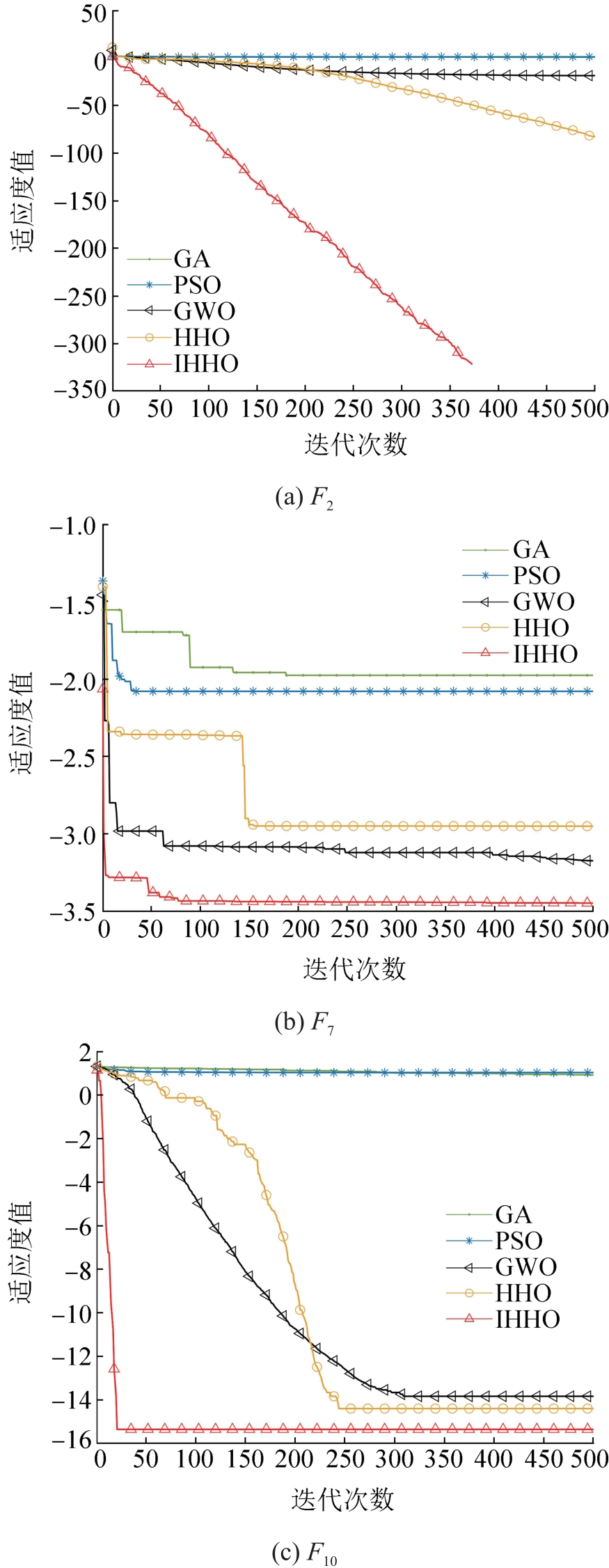
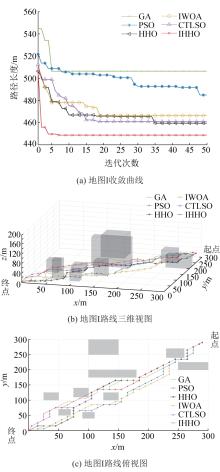
Fig. 8
Experimental results of static map
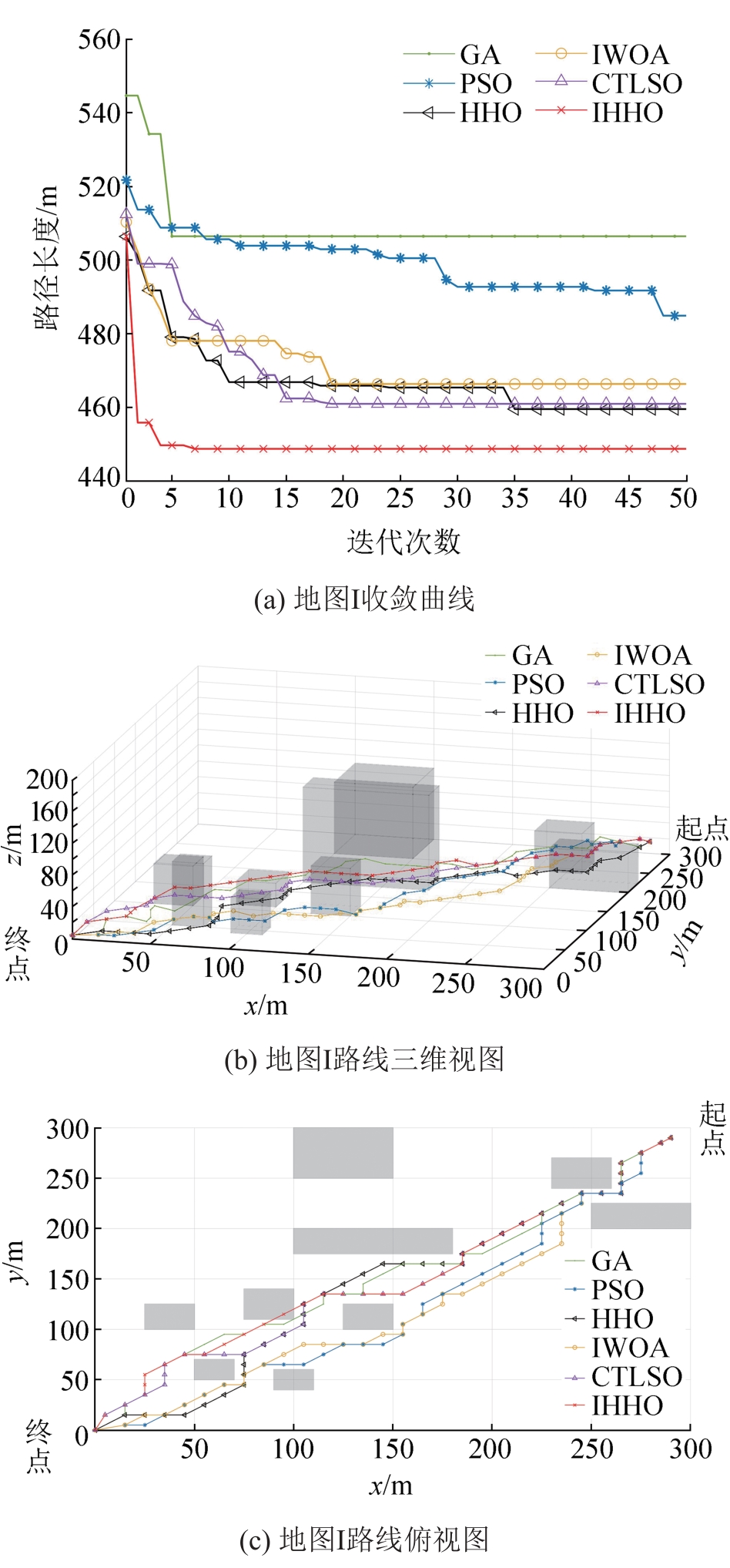
Table 3
Experimental data of static map
| 环境 | 算法 | 平均路径 长度/m | 转角数 | 运行 时间/s |
|---|---|---|---|---|
| 地图Ⅰ | GA | 506.485 | 29 | 14.430 |
| PSO | 484.931 | 23 | 15.036 | |
| HHO | 459.572 | 22 | 14.337 | |
| IWOA | 466.393 | 19 | 13.822 | |
| CTLSO | 460.992 | 14 | 13.112 | |
| IHHO | 448.778 | 13 | 9.538 | |
| IHHO平均优化率/% | 5.52 | 35.65 | 32.43 | |
| 地图Ⅱ | GA | 1 815.114 | 30 | 19.022 |
| PSO | 1 733.927 | 31 | 18.741 | |
| HHO | 1 677.342 | 20 | 17.698 | |
| IWOA | 1 627.704 | 20 | 16.776 | |
| CTLSO | 1 613.145 | 14 | 15.830 | |
| IHHO | 1 592.054 | 14 | 11.753 | |
| IHHO平均优化率/% | 5.81 | 33.63 | 32.95 | |
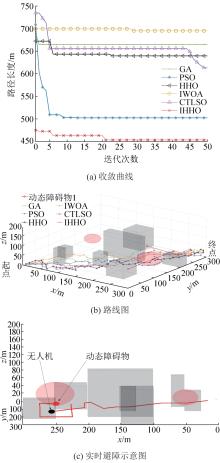
Fig. 9
Experimental results of 300×300×200 dynamic map Ⅰ
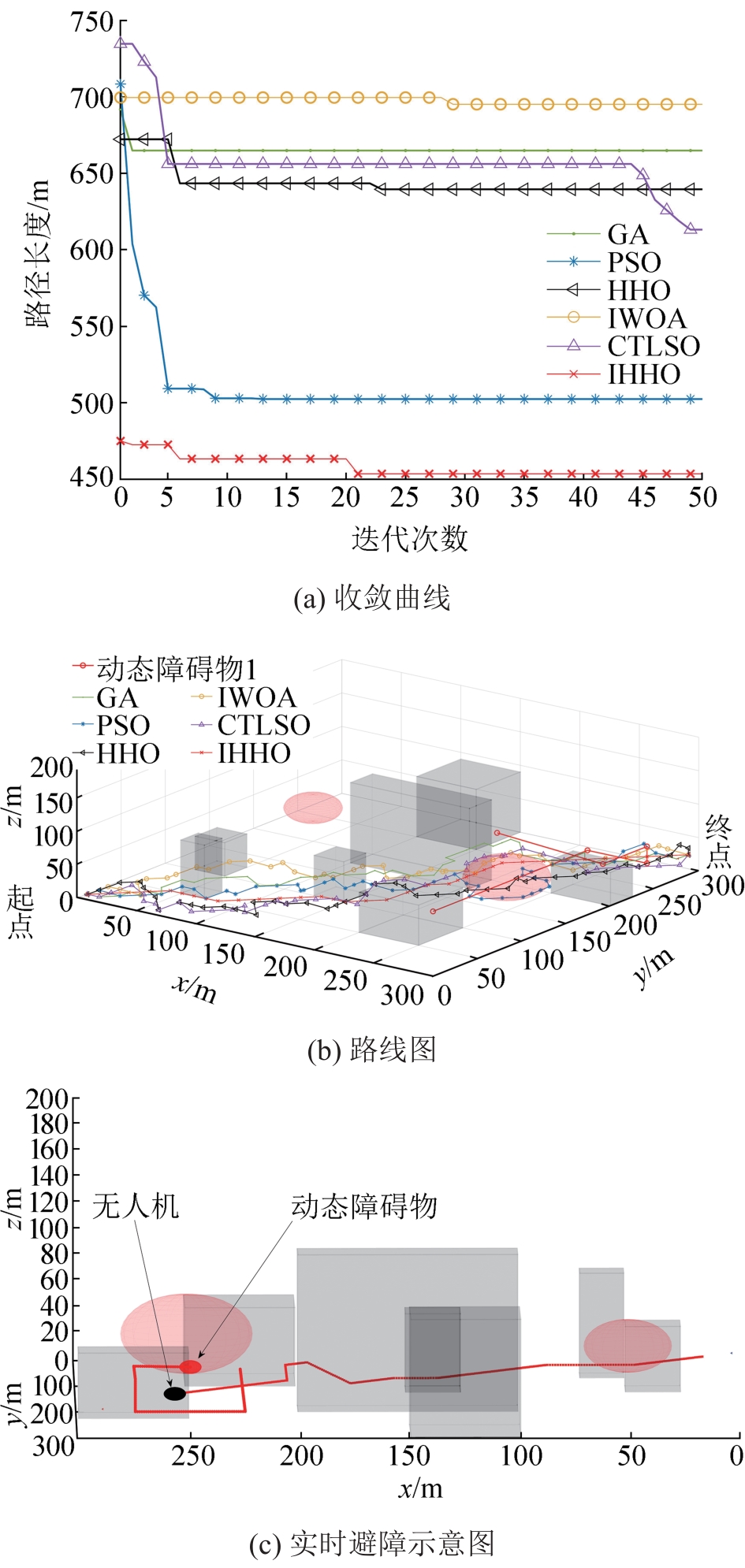

Fig. 10
Experimental results of dynamic map Ⅱ
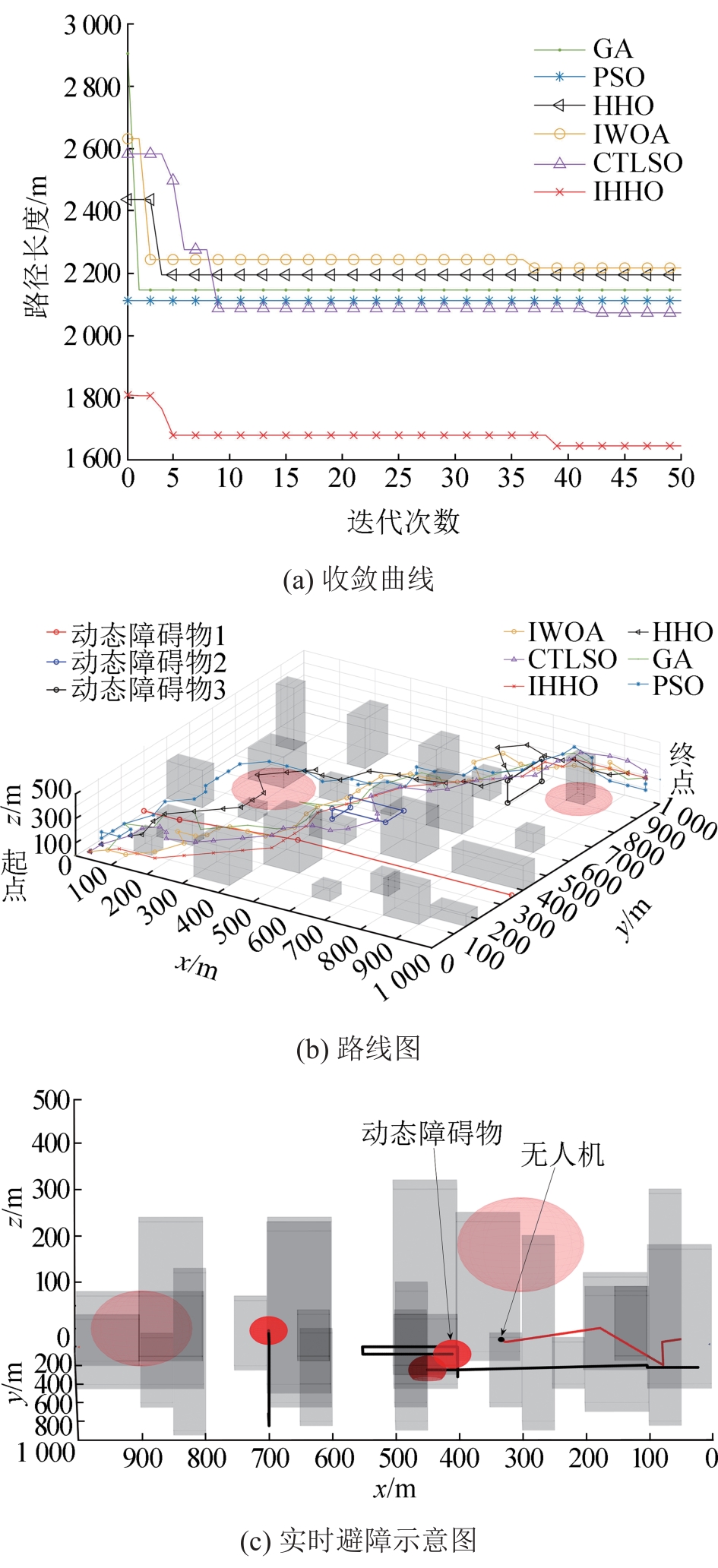
Table 4
Experimental results of dynamic map
| 环境 | 算法 | 平均路径 长度/m | 转角数 | 运行 时间/s |
|---|---|---|---|---|
| 地图Ⅰ | GA | 664.796 | 37 | 28.632 |
| PSO | 502.411 | 15 | 23.889 | |
| HHO | 639.471 | 31 | 47.592 | |
| IWOA | 695.042 | 19 | 50.993 | |
| CTLSO | 613.115 | 27 | 46.634 | |
| IHHO | 453.553 | 6 | 20.393 | |
| IHHO平均优化率/% | 26.27 | 74.13 | 43.33 | |
| 地图Ⅱ | GA | 2 146.167 | 25 | 31.565 |
| PSO | 2 112.059 | 24 | 28.076 | |
| HHO | 2 194.731 | 21 | 60.631 | |
| IWOA | 2 216.877 | 20 | 56.057 | |
| CTLSO | 2 072.962 | 23 | 62.250 | |
| IHHO | 1 646.203 | 7 | 27.442 | |
| IHHO平均优化率/% | 23.34 | 68.81 | 35.40 | |
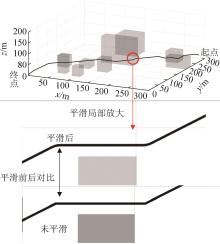
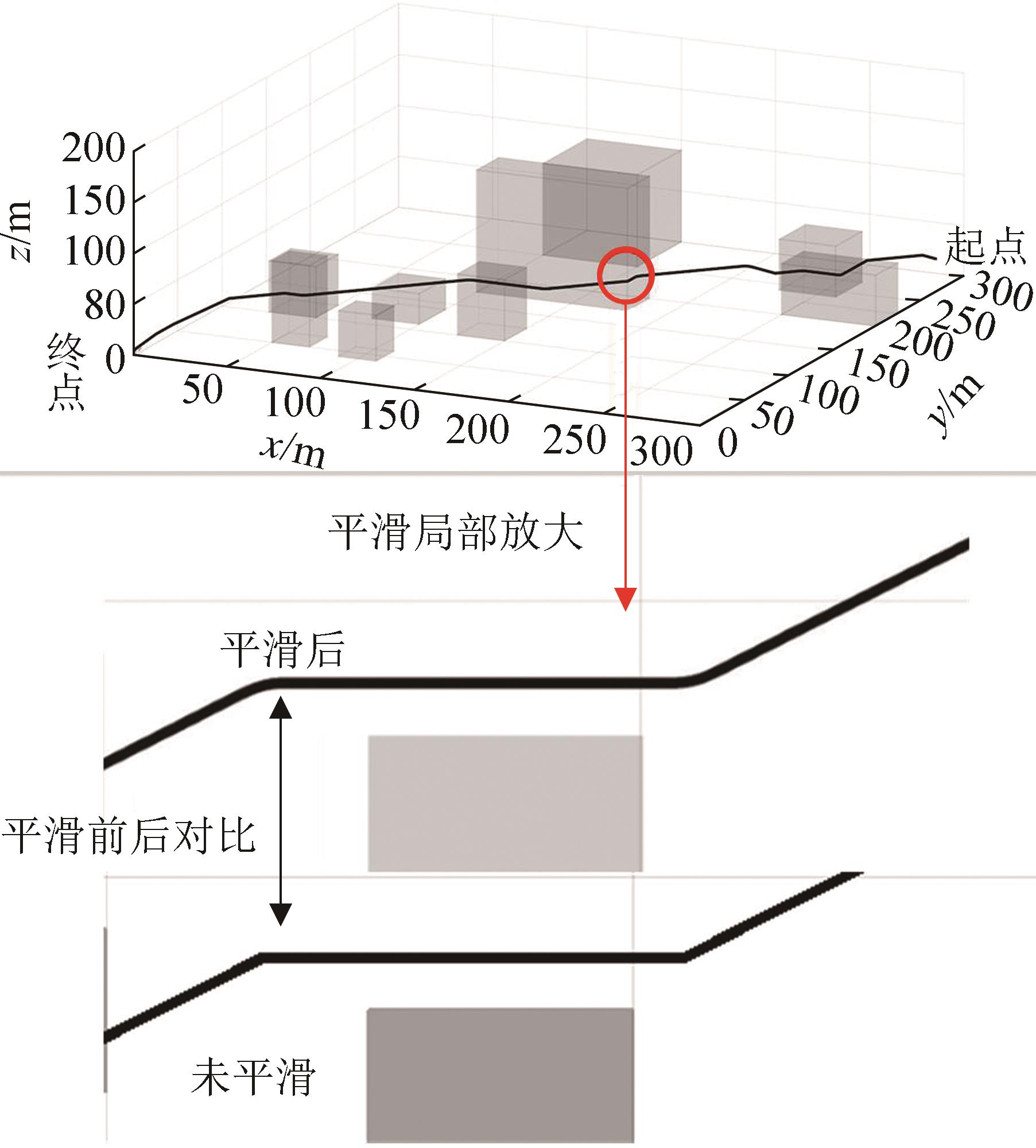
Fig. 11
Path smoothing
| 1 | Hart P E, Nilsson N J, Raphael B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 2 | 程传奇, 郝向阳, 李建胜, 等. 融合改进A*算法和动态窗口法的全局动态路径规划[J]. 西安交通大学学报, 2017, 51(11): 137-143. |
| Cheng Chuanqi, Hao Xiangyang, Li Jiansheng, et al. Global Dynamic Path Planning Based on Fusion of Improved A* Algorithm and Dynamic Window Approach[J]. Journal of Xi'an Jiaotong University, 2017, 51(11): 137-143. | |
| 3 | Brock O, Khatib O, Viji S. Task-consistent Obstacle Avoidance and Motion Behavior for Mobile Manipulation[C]//Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292). Piscataway, NJ, USA: IEEE, 2002: 388-393. |
| 4 | 黄志锋, 刘媛华, 张聪. 多策略融合的改进狮群算法及其工程优化[J]. 小型微型计算机系统, 2024, 45(4): 838-844. |
| Huang Zhifeng, Liu Yuanhua, Zhang Cong. Multi-strategy Fusion Improved Lion Swarm Optimization Algorithm and Its Application of Project Optimization[J]. Journal of Chinese Computer Systems, 2024, 45(4): 838-844. | |
| 5 | Liu Kun, Cheng Xü, Huang Daqing, et al. UAV Path Planning Based on Improved Whale optimization Algorithm[C]//2021 IEEE International Conference on Consumer Electronics and Computer Engineering (ICCECE). Piscataway, NJ, USA: IEEE, 2021: 569-573. |
| 6 | Ma Guoyuan, Yue Xiaofeng. An Improved Whale Optimization Algorithm Based on Multilevel Threshold Image Segmentation Using the Otsu Method[J]. Engineering Applications of Artificial Intelligence, 2022, 113: 104960. |
| 7 | Heidari A A, Mirjalili S, Faris Hossam, et al. Harris Hawks Optimization: Algorithm and Applications[J]. Future Generation Computer Systems, 2019, 97: 849-872. |
| 8 | 马云红, 张恒, 齐乐融, 等. 基于改进A*算法的三维无人机路径规划[J]. 电光与控制, 2019, 26(10): 22-25. |
| Ma Yunhong, Zhang Heng, Qi Lerong, et al. A 3D UAV Path Planning Method Based on Improved A* Algorithm[J]. Electronics Optics & Control, 2019, 26(10): 22-25. | |
| 9 | 谌海云, 陈华胄, 刘强. 基于改进人工势场法的多无人机三维编队路径规划[J]. 系统仿真学报, 2020, 32(3): 414-420. |
| Chen Haiyun, Chen Huazhou, Liu Qiang. Multi-UAV 3D Formation Path Planning Based on Improved Artificial Potential Field[J]. Journal of System Simulation, 2020, 32(3): 414-420. | |
| 10 | 黄志锋, 刘媛华. 基于四阶贝塞尔曲线和改进狮群优化算法求解路径规划问题[J]. 信息与控制, 2023, 52(2): 176-189. |
| Huang Zhifeng, Liu Yuanhua. Solving Path Planning Problem Based on Fourth-order Bezier Curve and Improved Lion Swarm Optimization Algorithm[J]. Information and Control, 2023, 52(2): 176-189. | |
| 11 | 黄志锋, 刘媛华. 基于改进狮群算法的城市无人机低空路径规划[J]. 信息与控制, 2023, 52(6): 747-757, 772. |
| Huang Zhifeng, Liu Yuanhua. Low Altitude Path Planning of Urban UAV Based on Improved Lion Swarm Optimization[J]. Information and Control, 2023, 52(6): 747-757, 772. | |
| 12 | 郭启程, 杜晓玉, 张延宇, 等. 基于改进鲸鱼算法的无人机三维路径规划[J]. 计算机科学, 2021, 48(12): 304-311. |
| Guo Qicheng, Du Xiaoyu, Zhang Yanyu, et al. Three-dimensional Path Planning of UAV Based on Improved Whale Optimization Algorithm[J]. Computer Science, 2021, 48(12): 304-311. | |
| 13 | 高建瓴, 喻明毫. 混合差分进化与二次插值改进哈里斯鹰算法[J]. 小型微型计算机系统, 2023, 44(7): 1352-1359. |
| Gao Jianling, Yu Minghao. Hybrid Differential Evolution and Quadratic Interpolation Improved Harris Hawks Optimization Algorithm[J]. Journal of Chinese Computer Systems, 2023, 44(7): 1352-1359. | |
| 14 | 苏佳, 杨志华, 刘彦明. 基于改进哈里斯鹰算法的系统能效优化[J]. 华中科技大学学报(自然科学版), 2024, 52(3): 58-64. |
| Su Jia, Yang Zhihua, Liu Yanming. System Energy Efficiency Optimization Based on Improved Harris Hawk Algorithm[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2024, 52(3): 58-64. | |
| 15 | 刘小龙, 梁彤缨. 基于方形邻域和随机数组的哈里斯鹰优化算法[J]. 控制与决策, 2022, 37(10): 2467-2476. |
| Liu Xiaolong, Liang Tongying. Harris Hawk Optimization Algorithm Based on Square Neighborhood and Random Array[J]. Control and Decision, 2022, 37(10): 2467-2476. | |
| 16 | 林之博, 刘媛华. 融合螺旋策略的离散混沌群粒振荡搜索算法[J]. 计算机应用研究, 2021, 38(10): 3060-3066, 3071. |
| Lin Zhibo, Liu Yuanhua. Dispersed Chaotic Swarm Oscillation Algorithm Merged with Spiral Strategy[J]. Application Research of Computers, 2021, 38(10): 3060-3066, 3071. | |
| 17 | 郭雨鑫, 刘升, 高文欣, 等. 精英反向学习与黄金正弦优化的HHO算法[J]. 计算机工程与应用, 2022, 58(10): 153-161. |
| Guo Yuxin, Liu Sheng, Gao Wenxin, et al. Elite Opposition-based Learning Golden-sine Harris Hawks Optimization[J]. Computer Engineering and Applications, 2022, 58(10): 153-161. |
| [1] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [2] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [3] | Qu Changhong, Wang Junjie, Wang Kun, Cui Qingyong, Chen Jiangyang, Wang Xinpeng. A Modeling and Simulation Method for Firepower Intelligent Decision-making of Directed Energy System Based on Joint DQN [J]. Journal of System Simulation, 2025, 37(5): 1256-1265. |
| [4] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [5] | Yang Chao, Zheng Ruiqun, Li Zhen, Zhang Hongwei, Tang Yanqun, Li Dongze. Parallel Task Transmission and Processing Optimization Scheme for UAV-assisted Internet of Vehicles [J]. Journal of System Simulation, 2025, 37(3): 635-645. |
| [6] | Jiang Limei, Chen Xinwei. Visual SLAM Algorithm Based on Feature Point Selection in Dynamic Scenes [J]. Journal of System Simulation, 2025, 37(3): 753-762. |
| [7] | Hu Shijun, Liu Hailiang, Wang Binglei, Su Wenke. Quadrotor UAV Path Planning Based on Rapidly-exploration Directional Tree Algorithm [J]. Journal of System Simulation, 2025, 37(2): 311-324. |
| [8] | Peng Yi, Lei Yunkui, Yang Qingqing, Li Hui, Wang Jianming. Improved PID Search Algorithm for UAV Path Planning in Mountainous Environments [J]. Journal of System Simulation, 2025, 37(12): 3075-3086. |
| [9] | Li Boning, Chen Ming, Qi Shuchang, Meng Haoran, Wang Lei. Attitude Control of Quadrotor UAV Based on Disturbance Observer and Command Filtering [J]. Journal of System Simulation, 2025, 37(11): 2793-2803. |
| [10] | Liang Xiuman, Liu Ziliang, Liu Zhendong. Path Planning of Improved RRT Algorithm Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(10): 2578-2593. |
| [11] | Huang Zhiqin, Lu Tianying, Chen Zheyi. Multi-UAV Deployment and Collaborative Offloading for Large-scale IoT Systems [J]. Journal of System Simulation, 2025, 37(1): 25-39. |
| [12] | Wang Qiwei, Zhang Qi, Yang Shuo, Peng Yong. Design of Robust Behavior Tree Control Architecture for Agents in Dynamic Task Environment [J]. Journal of System Simulation, 2025, 37(1): 54-65. |
| [13] | Yin Anlin, Zhang Zhuhong. UAV Path Planning in Complex Environments and Its Improved Artificial Rabbits Optimization Algorithm [J]. Journal of System Simulation, 2025, 37(1): 79-94. |
| [14] | Li Erchao, Zhang Shenghui. UAV Online Track Planning Based on DMOEA-APTC Algorithm [J]. Journal of System Simulation, 2024, 36(9): 2086-2099. |
| [15] | Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(8): 1843-1853. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
