

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2086-2099.doi: 10.16182/j.issn1004731x.joss.23-0615
Previous Articles Next Articles
Li Erchao, Zhang Shenghui
Received:2023-05-24
Revised:2023-07-07
Online:2024-09-15
Published:2024-09-30
Contact:
Zhang Shenghui
CLC Number:
Li Erchao, Zhang Shenghui. UAV Online Track Planning Based on DMOEA-APTC Algorithm[J]. Journal of System Simulation, 2024, 36(9): 2086-2099.
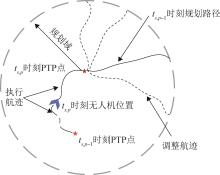
Fig. 1
Online track planning
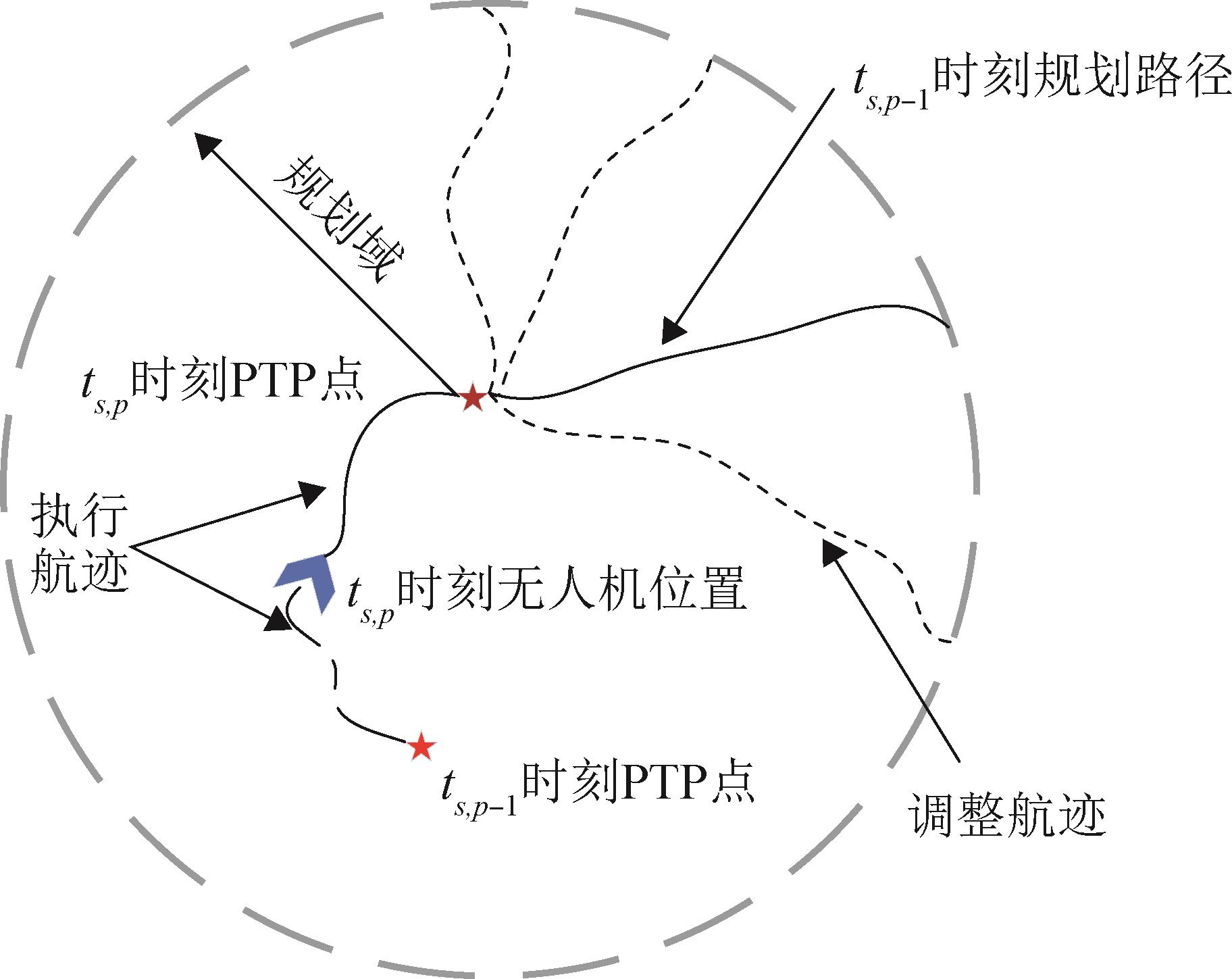
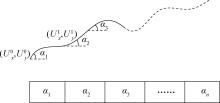
Fig. 2
Track coding
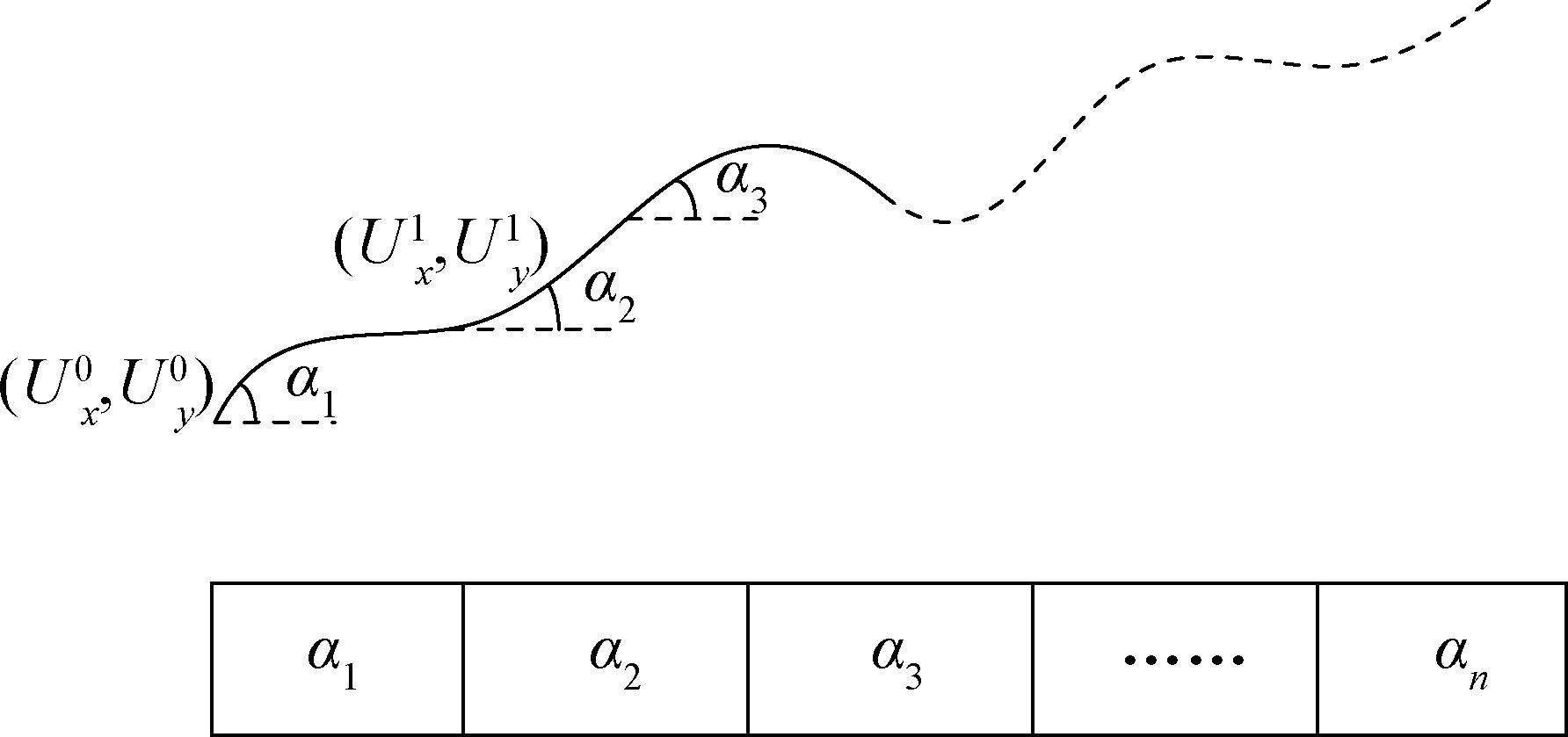

Fig. 3
Distance cost
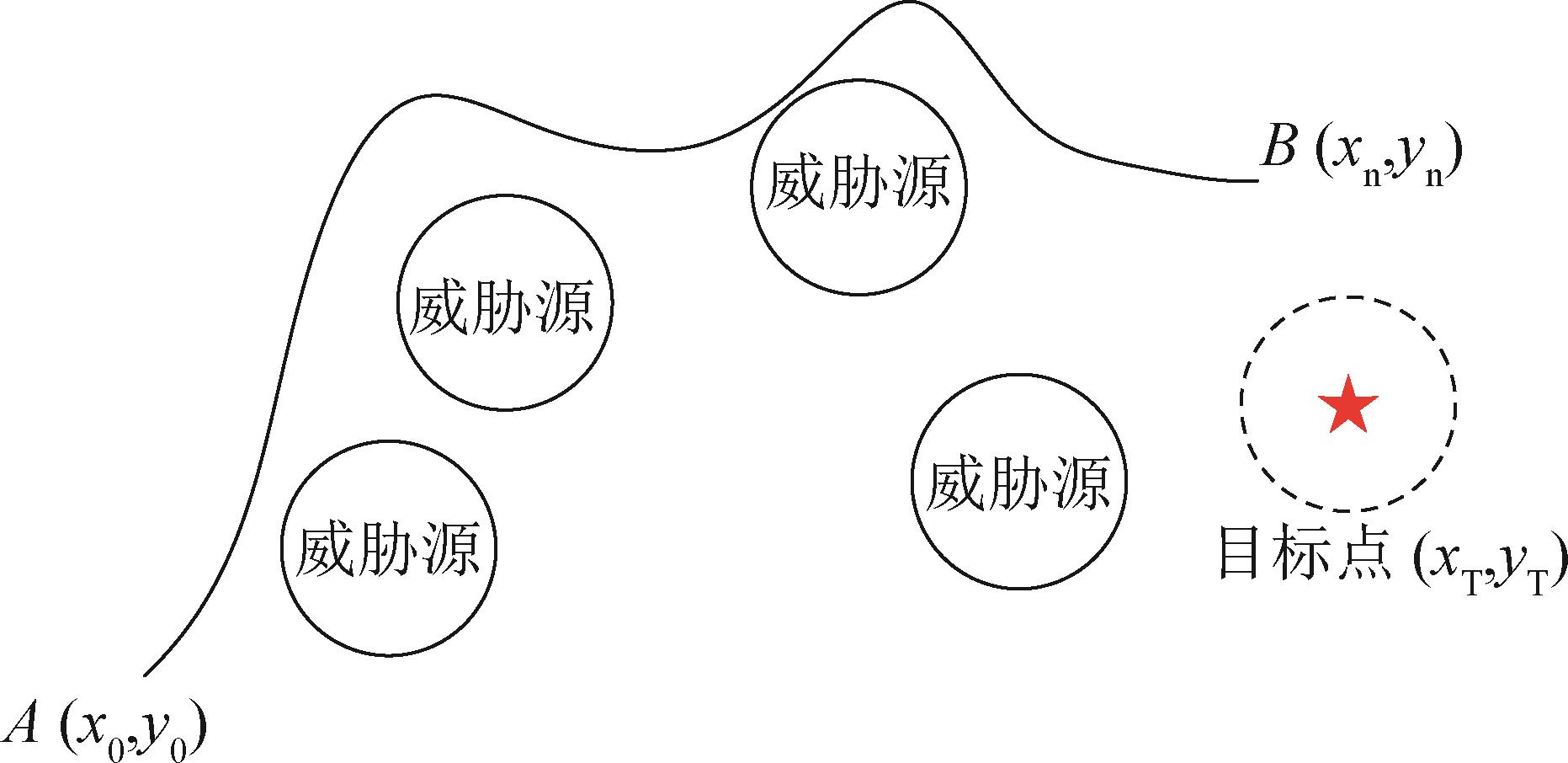
Fig. 4
Refer ence to straight-line
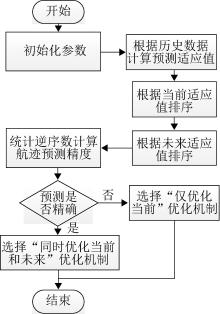
Fig. 5
Flow chart of time correlation optimization algorithm
Table 1
Threat feed parameters
| 威胁 | ||||
|---|---|---|---|---|
| K1 | -30 | 10 | 3.0 | 3.0 |
| K2 | 5 | 0 | 3.0 | 3.0 |
| K3 | 20 | -10 | 3.0 | 3.0 |
| K4 | 25 | -5 | 3.0 | 3.0 |
| K5 | 30 | 0 | 2.7 | 2.7 |
| K6 | 30 | -40 | 3.0 | 3.0 |
| K7 | -10 | 40 | 3.0 | 3.0 |
| K8 | -20 | -30 | 2.7 | 2.7 |
| K9 | 0 | -30 | 2.1 | 2.1 |
| K10 | -14 | -10 | 2.4 | 2.4 |
| K11 | -10 | 20 | 3.0 | 3.0 |
| K12 | 10 | 30 | 2.1 | 2.1 |
| K13 | -30 | -10 | 3.3 | 3.3 |
| K14 | -30 | 40 | 3.9 | 3.9 |
| K15 | 20 | 20 | 4.5 | 4.5 |
| K16 | 10 | -20 | 4.5 | 4.5 |
| K17 | 30 | 40 | 3.0 | 3.0 |
Fig. 6
Threat feed distribution map

Fig. 7
Plan tracks in case of static threats

Fig. 8
Heading angle change curve in static threat situations
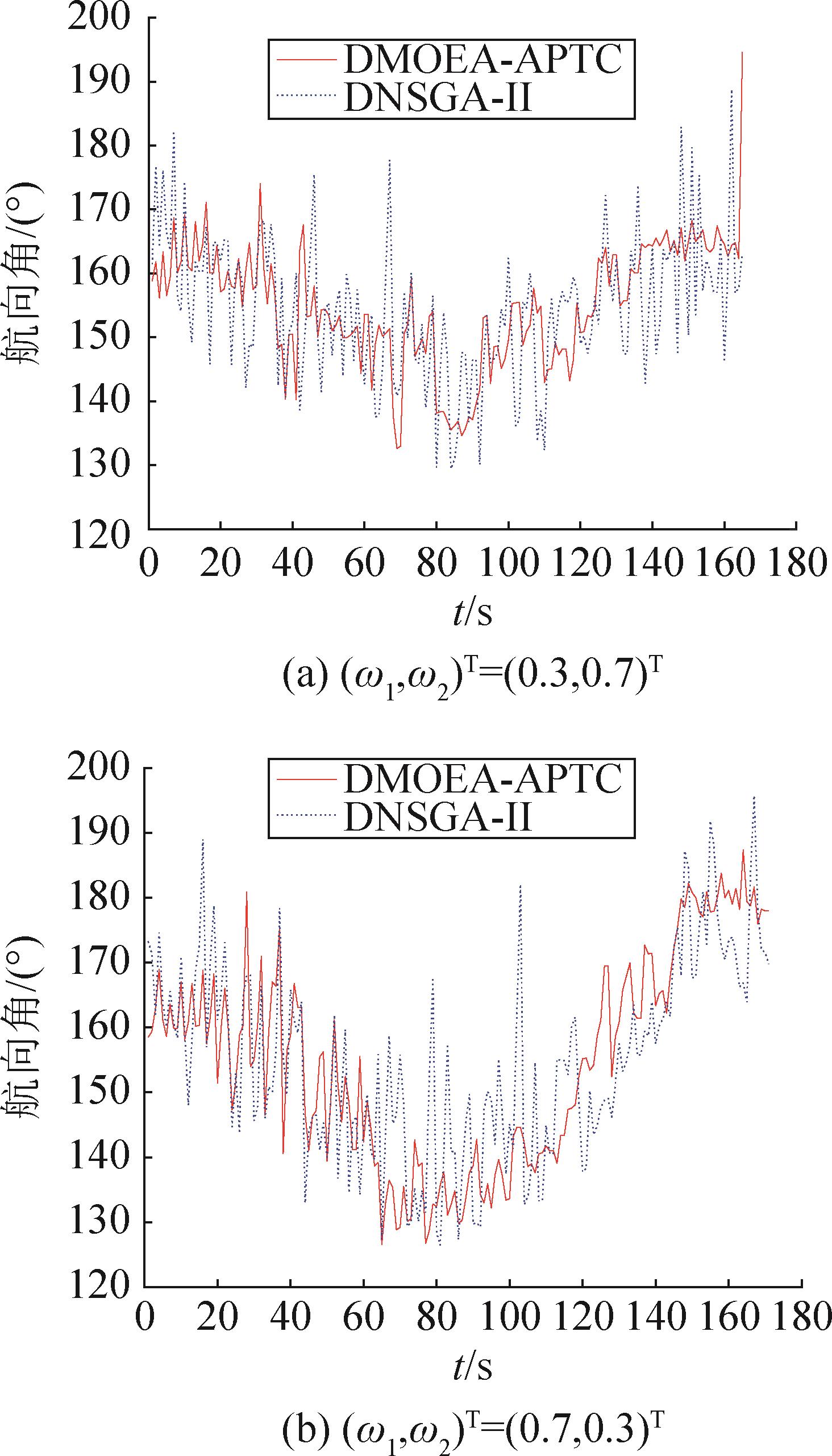
Table 2
Plan results for static threat scenarios
| 偏好设置 | 规划方法 | 飞行时间/s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 171 | 0.931 68 | 9.667 7 | |
| DNSGA-II | 175 | 0.907 86 | 11.457 4 | |
| DMOEA-APTC | 165 | 0.876 83 | 5.309 0 | |
| DNSGA-II | 168 | 0.850 36 | 8.586 5 |

Fig. 9
Plan tracks in case of sudden threats
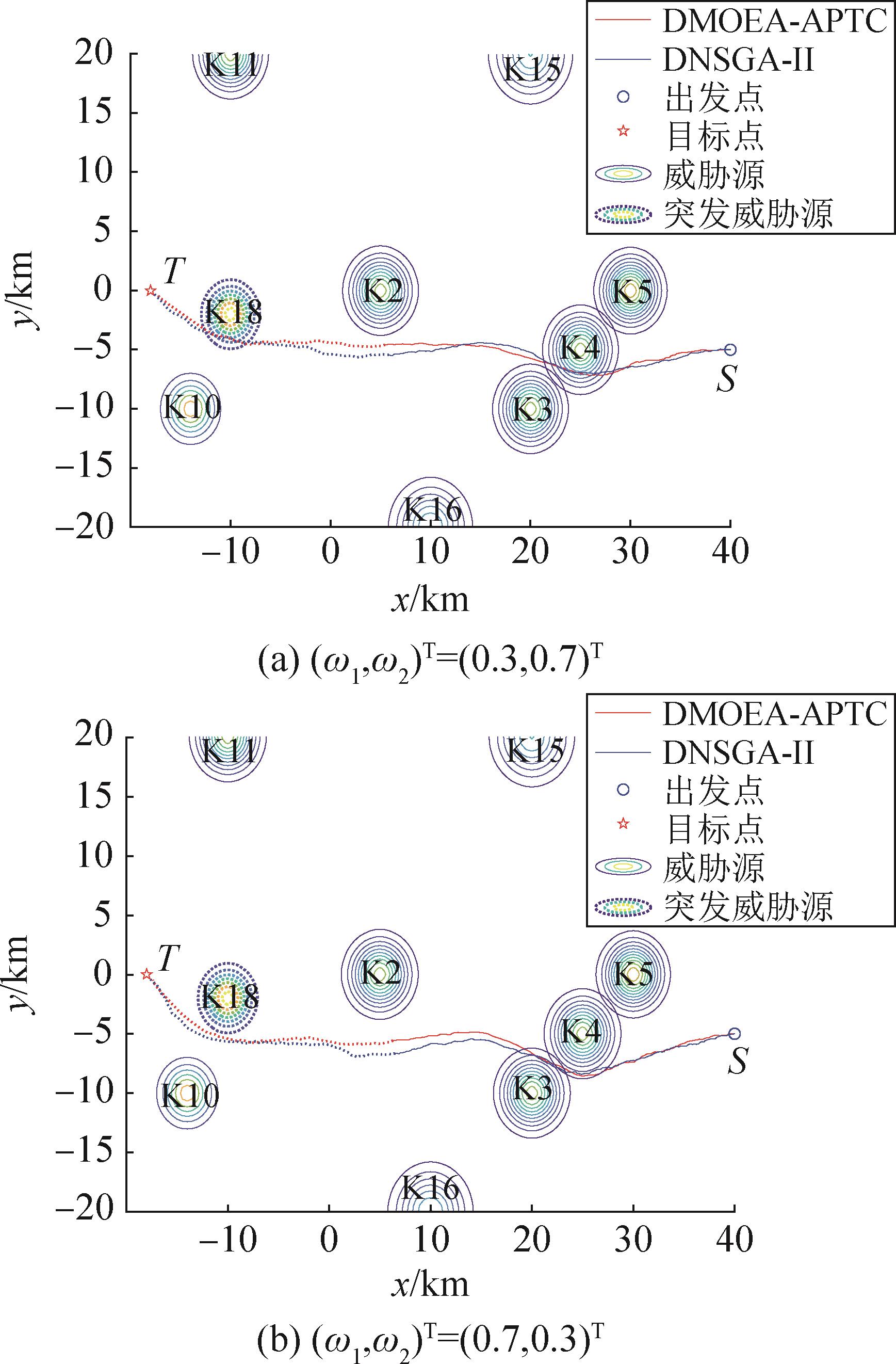

Fig. 10
Heading angle change curve in sudden threat situations
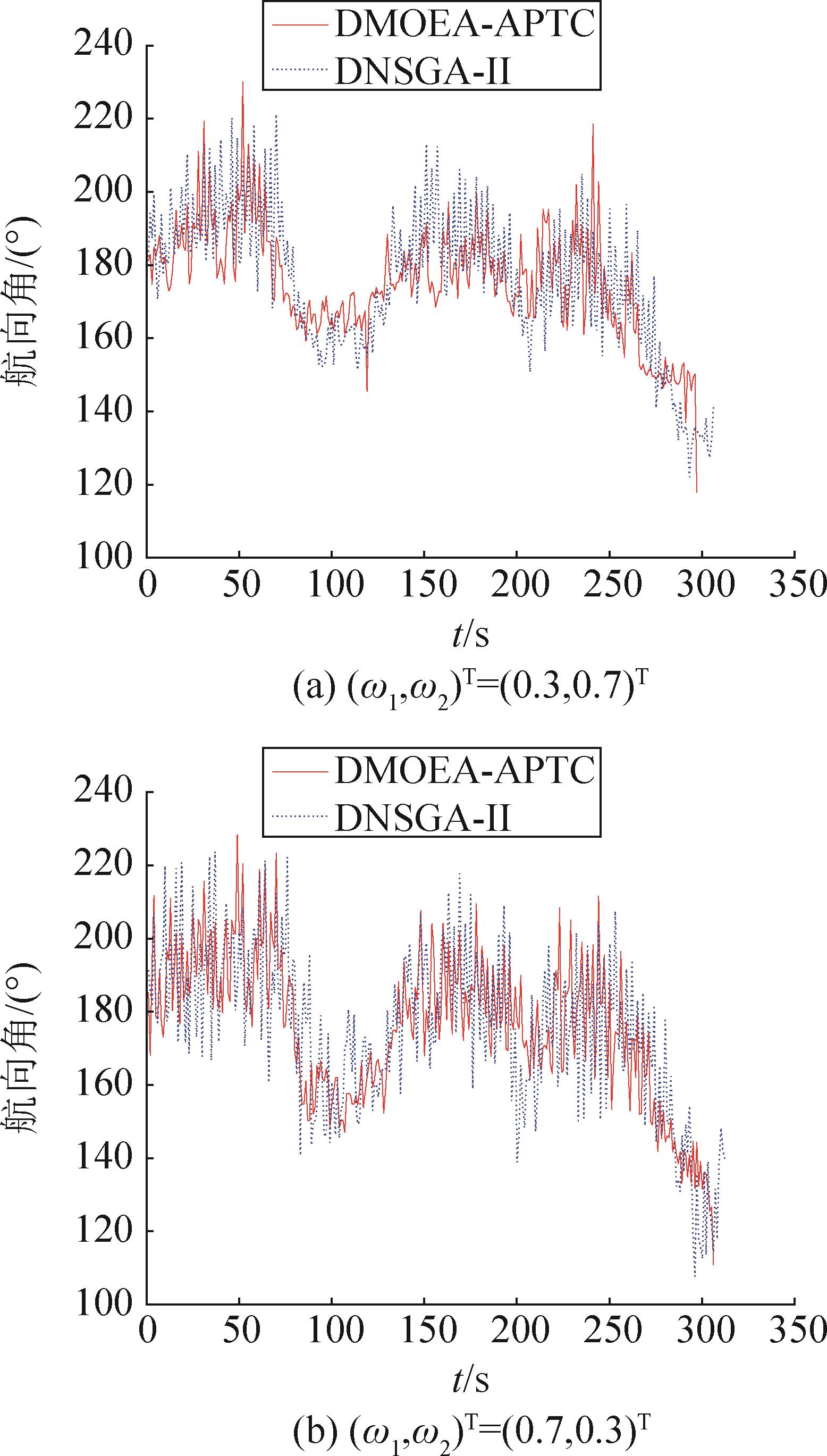
Table 3
Plan outcomes in emergent threat situations
| 偏好设置 | 规划方法 | 飞行时间/ s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 306 | 0.953 26 | 12.943 7 | |
| DNSGA-II | 312 | 0.957 49 | 14.849 7 | |
| DMOEA-APTC | 297 | 0.812 97 | 8.558 2 | |
| DNSGA-II | 306 | 0.850 36 | 11.978 3 |

Fig. 11
Plan tracks in case of mutation threat
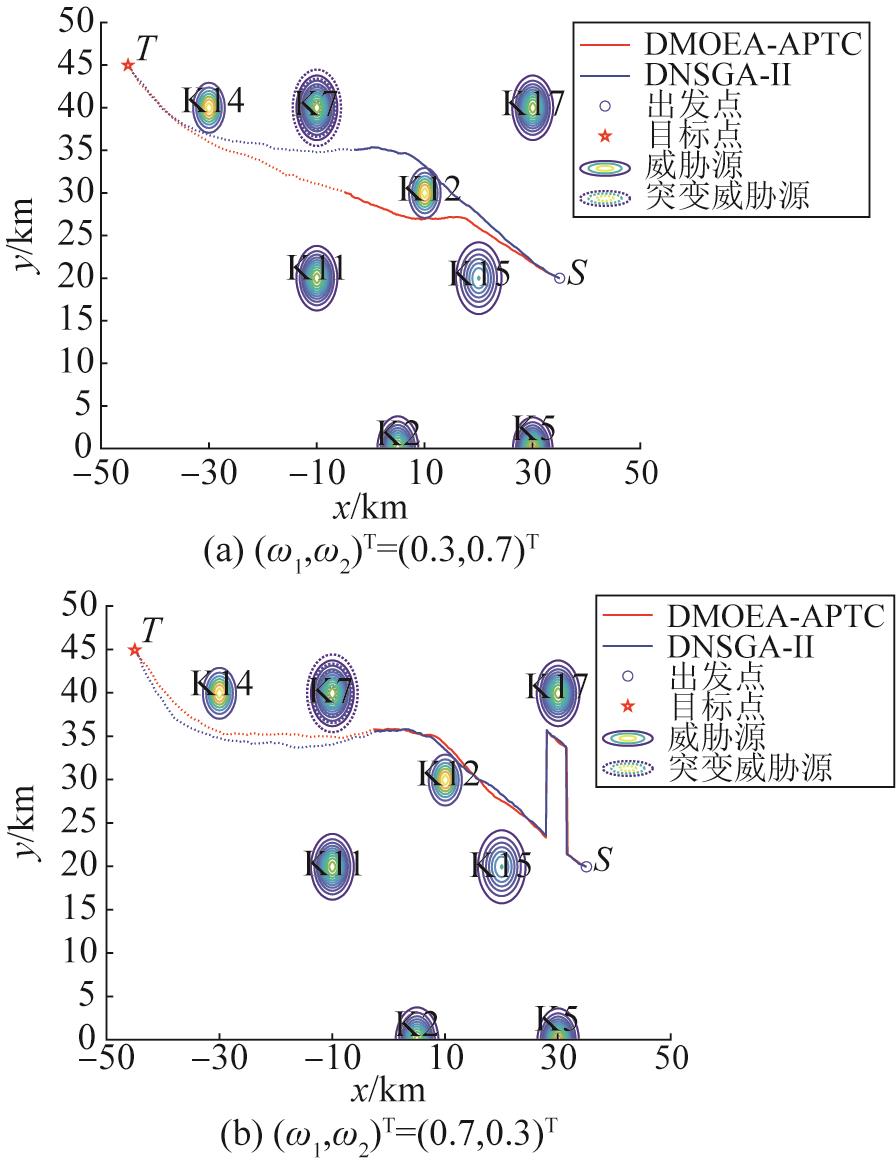

Fig. 12
Heading angle change curve in abrupt threat situations
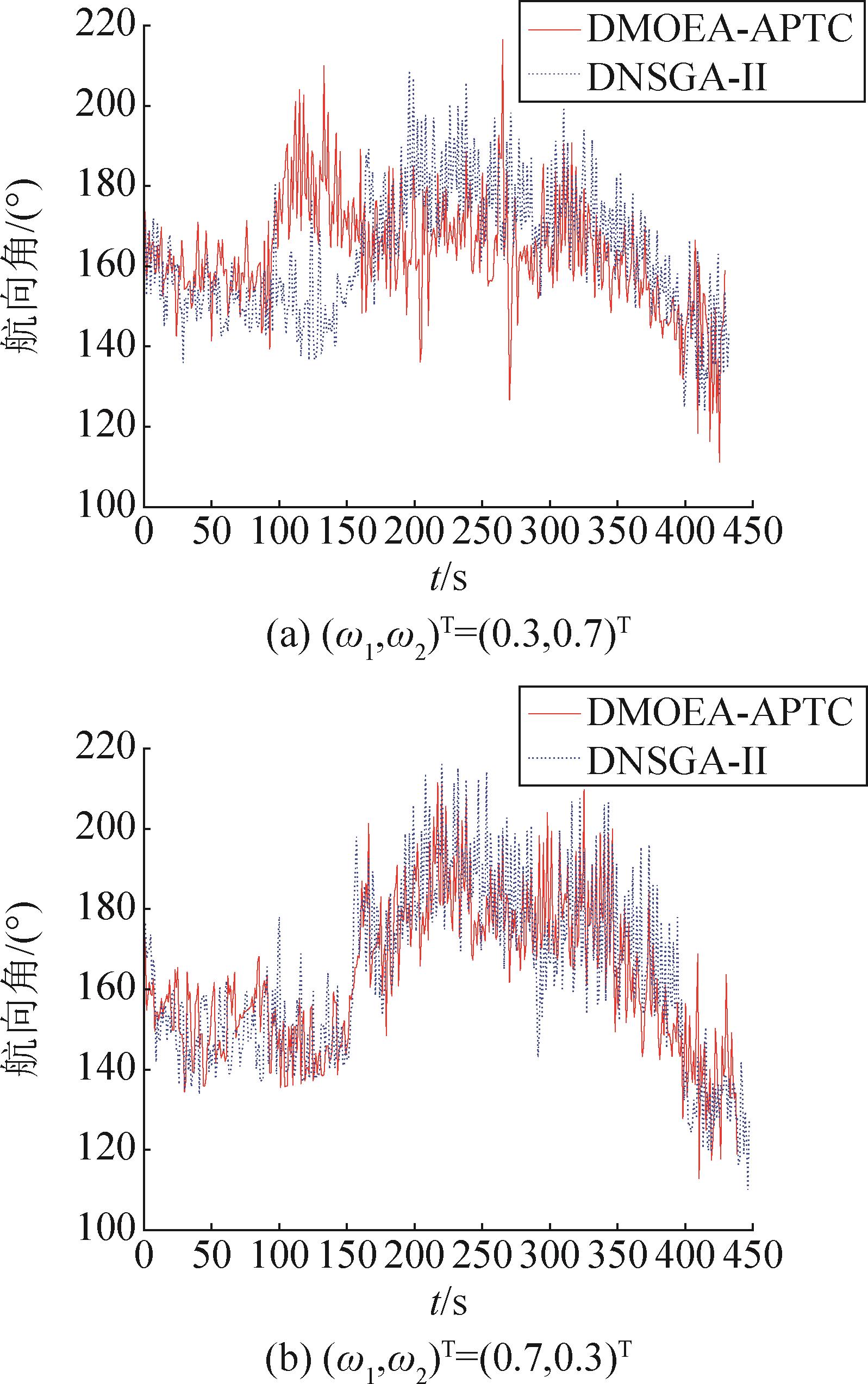
Table 4
Plan outcomes in mutation threat situations
| 偏好设置 | 规划方法 | 飞行时间/s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 438 | 0.916 01 | 11.887 3 | |
| DNSGA-II | 447 | 0.892 31 | 14.160 6 | |
| DMOEA-APTC | 429 | 0.844 18 | 8.930 3 | |
| DNSGA-II | 432 | 0.810 41 | 11.247 6 |
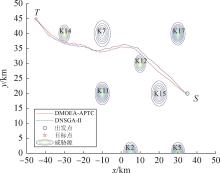
Fig. 13
Plan tracks when preferences change

Fig. 14
Heading angle change curve when preference changes
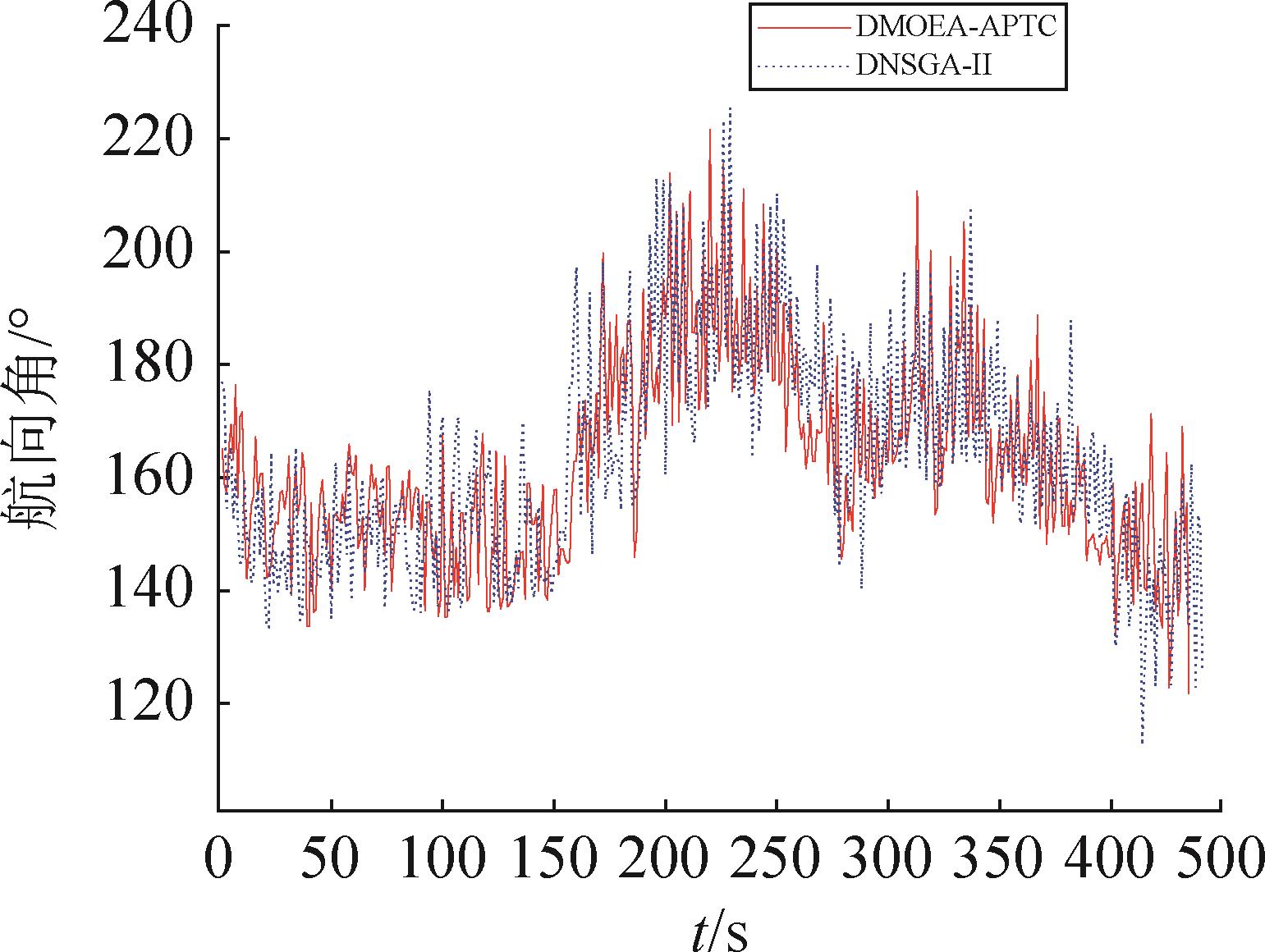
Table 5
Plan outcomes in case of preference changes
| 偏好设置 | 规划方法 | 飞行时间/s | 生存概率 | 航向角平均变化值/(°) |
|---|---|---|---|---|
| DMOEA-APTC | 435 | 0.884 95 | 11.036 7 | |
| DNSGA-II | 441 | 0.875 93 | 13.085 1 |
| 1 | 卢新来, 杜子亮, 许赟. 航空人工智能概念与应用发展综述[J]. 航空学报, 2021, 42(4): 245-258. |
| Lu Xinlai, Du Ziliang, Xu Yun. Review on Basic Concept and Applications for Artificial Intelligence in Aviation[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 245-258. | |
| 2 | 杨伟. 关于未来战斗机发展的若干讨论[J]. 航空学报, 2020, 41(6): 1-12. |
| Yang Wei. Some Discussions on the Development of Future Fighters[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(6): 1-12. | |
| 3 | Harker T W, Gilday M M, Berger D H. Department of Navy Unmanned Campaign Framework[EB/OL]. [2021-03-16]. . |
| 4 | 雷宏杰, 姚呈康. 面向军事应用的航空人工智能技术架构研究[J]. 导航定位与授时, 2020, 7(1): 1-11. |
| Lei Hongjie, Yao Chengkang. Technical Architecture of Aviation Artificial Intelligence for Military Application[J]. Navigation Positioning and Timing, 2020, 7(1): 1-11. | |
| 5 | Aggarwal Shubhani, Kumar Neeraj. Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges[J]. Computer Communications, 2020, 149: 270-299. |
| 6 | Shahid Noor, Abrar Muhammad, Ajmal Ushna, et al. Path Planning in Unmanned Aerial Vehicles: An Optimistic Overview[J]. International Journal of Communication Systems, 2022, 35(6): e5090. |
| 7 | 李波, 屈原, 徐静. 复杂动态环境下基于DMPC-PSO 的多无人机在线航迹规划[J]. 内蒙古师范大学学报(自然科学汉文版), 2018, 47(6): 491-498. |
| Li Bo, Qu Yuan, Xu Jing. DMPC-PSO Based on Multiple Unmanned Aerial Vehicles Real-time Route Planning in Complex Dynamic Environment[J]. Journal of Inner Mongolia Normal University(Natural Science Edition), 2018, 47(6): 491-498. | |
| 8 | 陈都, 孟秀云. 基于改进ARA*算法的无人机在线航迹规划[J]. 飞行力学, 2021, 39(1): 60-65. |
| Chen Dou, Meng Xiuyun. UAV Online Path Planning Based on Improved ARA* Algorithm[J]. Flight Dynamics, 2021, 39(1): 60-65. | |
| 9 | Li Keyu, Lu Yonggen, Zhang Yanchi. Dynamic Obstacle Avoidance Path Planning of UAV Based on Improved APF[C]//2020 5th International Conference on Communication, Image and Signal Processing (CCISP). Piscataway, NJ, USA: IEEE, 2020: 159-163. |
| 10 | Liu Wei, Hao Peng, Zheng Zheng, et al. FBCRI Based Real-time Path Planning for Unmanned Aerial Vehicles in Unknown Environments with Uncertainty[J]. 机器人, 2013, 35(6): 641-650. |
| 11 | Margraff Julien, Stéphant Joanny, Labbani-Igbida Ouiddad. UAV 3D Path and Motion Planning in Unknown Dynamic Environments[C]//2020 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway, NJ, USA: IEEE, 2020: 77-84. |
| 12 | 彭星光, 徐德民, 高晓光. 基于Pareto解集关联与预测的动态多目标进化算法[J]. 控制与决策, 2011, 26(4): 615-618. |
| Peng Xingguang, Xu Demin, Gao Xiaoguang. A Dynamic Multi-objective Evolutionary Algorithm Based on Pareto Set Linkage and Prediction[J]. Control and Decision, 2011, 26(4): 615-618. | |
| 13 | 唐嘉钰, 李相民, 代进进. 基于威胁建模的UCAV武器投放在线航迹规划[J]. 西北工业大学学报, 2021, 39(2): 382-391. |
| Tang Jiayu, Li Xiangmin, Dai Jinjin. Online Trajectory Planning for UCAV Performing Ground Attacks Based on Threat Modeling[J]. Journal of Northwestern Polytechnical University, 2021, 39(2): 382-391. | |
| 14 | 汪瀚洋, 陈亮, 徐海, 等. 基于MOEA/D-ARMS的无人机在线航迹规划[J]. 系统工程与电子技术, 2022, 44(11): 3505-3514. |
| Wang Hanyang, Chen Liang, Xu Hai, et al. UAV Online Trajectory Planning Based on MOEA/D-ARMS[J]. Systems Engineering and Electronics, 2022, 44(11): 3505-3514. | |
| 15 | 任智, 张栋, 唐硕. 基于强化学习的改进三维A*算法在线航迹规划[J]. 系统工程与电子技术, 2023, 45(1): 193-201. |
| Ren Zhi, Zhang Dong, Tang Shuo. Improved Three-dimensional A* Algorithm of Real-time Path Planning Based on Reinforcement Learning[J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. | |
| 16 | 池海红, 周明鑫. 融合强化学习和进化算法的高超声速飞行器航迹规划[J]. 控制理论与应用, 2022, 39(5): 847-856. |
| Chi Haihong, Zhou Mingxin. Trajectory Planning for Hypersonic Vehicle Combined with Reinforcement Learning and Evolutionary Algorithms[J]. Control Theory & Applications, 2022, 39(5): 847-856. | |
| 17 | Deb Kalyanmoy, Udaya Bhaskara Rao N, Karthik S. Dynamic Multi-objective Optimization and Decision-making Using Modified NSGA-II: A Case Study on Hydro-thermal Power Scheduling[C]//Evolutionary Multi-Criterion Optimization. Berlin, Heidelberg: Springer Berlin Heidelberg, 2007: 803-817. |
| 18 | Li Yibing, Zhang Sitong, Ye Fang, et al. A UAV Path Planning Method Based on Deep Reinforcement Learning[C]//2020 IEEE USNC-CNC-URSI North American Radio Science Meeting (Joint with AP-S Symposium). Piscataway, NJ, USA: IEEE, 2020: 93-94. |
| 19 | Liu Shengwei, Ma Yue. Research for Bidirectional Path Planning Based on An Improved A* Algorithm[C]//2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications(AEECA). Piscataway: IEEE, 2020: 1036-1039. |
| 20 | Chen Haiyang, Ji Yebiao, Niu Longhui. Reinforcement Learning Path Planning Algorithm Based on Obstacle Area Expansion Strategy[J]. Intelligent Service Robotics, 2020, 13(2): 289-297. |
| 21 | Li Bohao, Wu Yunjie. Path Planning for UAV Ground Target Tracking Via Deep Reinforcement Learning[J]. IEEE Access, 2020, 8: 29064-29074. |
| 22 | Dogan A. Probabilistic Path Planning for UAVs[C]//2nd AIAA "Unmanned Unlimited" Conf. and Workshop & Exhibit. Reston, VA, USA: AIAA, 2003: AIAA 2003-6552. |
| 23 | Roberge V, Tarbouchi M, Labonté Gilles. Fast Genetic Algorithm Path Planner for Fixed-wing Military UAV Using GPU[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(5): 2105-2117. |
| 24 | Song Qi, Zhao Qinglei, Wang Shuxin, et al. Dynamic Path Planning for Unmanned Vehicles Based on Fuzzy Logic and Improved Ant Colony Optimization[J]. IEEE Access, 2020, 8: 62107-62115. |
| 25 | Wu Xiaojing, Xu Lei, Zhen Ran, et al. Biased Sampling Potentially Guided Intelligent Bidirectional RRT∗ Algorithm for UAV Path Planning in 3D Environment[J]. Mathematical Problems in Engineering, 2019, 2019: 5157403. |
| 26 | Ma Xiaoliang, Zhang Qingfu, Tian Guangdong, et al. On Tchebycheff Decomposition Approaches for Multiobjective Evolutionary Optimization[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(2): 226-244. |
| 27 | 何春雄, 龙卫江, 朱锋峰. 概率论与数理统计[M]. 北京: 高等教育出版社, 2012: 79-80. |
| 28 | 彭星光. 面向无人系统的动态进化算法及应用[M]. 北京: 科学出版社, 2017: 87-104. |
| 29 | Xu Biao, Zhang Yong, Gong Dunwei, et al. Environment Sensitivity-based Cooperative Co-evolutionary Algorithms for Dynamic Multi-objective Optimization[J]. IEEE/ACM Transactions on Computational Biology and Bioinformatics, 2018, 15(6): 1877-1890. |
| 30 | Goh C K, Tan K C. A Coevolutionary Paradigm for Dynamic Multi-objective Optimization[M]//Goh C K, Tan K C. Evolutionary Multi-objective Optimization in Uncertain Environments: Issues and Algorithms. Berlin, Heidelberg: Springer Berlin Heidelberg, 2009: 153-185. |
| 31 | Deb K, Thiele L, Laumanns M, et al. Scalable Test Problems for Evolutionary Multiobjective Optimization[M]//Abraham A, Jain L, Goldberg R. Evolutionary Multiobjective Optimization: Theoretical Advances and Applications. London: Springer London, 2005: 105-145. |
| [1] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [2] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [3] | Qu Changhong, Wang Junjie, Wang Kun, Cui Qingyong, Chen Jiangyang, Wang Xinpeng. A Modeling and Simulation Method for Firepower Intelligent Decision-making of Directed Energy System Based on Joint DQN [J]. Journal of System Simulation, 2025, 37(5): 1256-1265. |
| [4] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [5] | Yang Chao, Zheng Ruiqun, Li Zhen, Zhang Hongwei, Tang Yanqun, Li Dongze. Parallel Task Transmission and Processing Optimization Scheme for UAV-assisted Internet of Vehicles [J]. Journal of System Simulation, 2025, 37(3): 635-645. |
| [6] | Hu Shijun, Liu Hailiang, Wang Binglei, Su Wenke. Quadrotor UAV Path Planning Based on Rapidly-exploration Directional Tree Algorithm [J]. Journal of System Simulation, 2025, 37(2): 311-324. |
| [7] | Peng Yi, Lei Yunkui, Yang Qingqing, Li Hui, Wang Jianming. Improved PID Search Algorithm for UAV Path Planning in Mountainous Environments [J]. Journal of System Simulation, 2025, 37(12): 3075-3086. |
| [8] | Li Boning, Chen Ming, Qi Shuchang, Meng Haoran, Wang Lei. Attitude Control of Quadrotor UAV Based on Disturbance Observer and Command Filtering [J]. Journal of System Simulation, 2025, 37(11): 2793-2803. |
| [9] | Liang Xiuman, Liu Ziliang, Liu Zhendong. Path Planning of Improved RRT Algorithm Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(10): 2578-2593. |
| [10] | Huang Zhiqin, Lu Tianying, Chen Zheyi. Multi-UAV Deployment and Collaborative Offloading for Large-scale IoT Systems [J]. Journal of System Simulation, 2025, 37(1): 25-39. |
| [11] | Yin Anlin, Zhang Zhuhong. UAV Path Planning in Complex Environments and Its Improved Artificial Rabbits Optimization Algorithm [J]. Journal of System Simulation, 2025, 37(1): 79-94. |
| [12] | Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(8): 1843-1853. |
| [13] | Huang Zhifeng, Liu Yuanhua. UAV Path Planning Based on Improved Harris Hawk Algorithm and B-spline Curve [J]. Journal of System Simulation, 2024, 36(7): 1509-1524. |
| [14] | Wang Tao, Ji Xiaodong. Optimal Trajectory of Full-duplex UAV Relaying over Hybrid Probability Channels [J]. Journal of System Simulation, 2024, 36(6): 1369-1377. |
| [15] | Zhu Jingyu, Zhang Hongli, Kuang Minchi, Shi Heng, Zhu Jihong, Qiao zhi, Zhou Wenqing. Curriculum Learning-based Simulation of UAV Air Combat Under Sparse Rewards [J]. Journal of System Simulation, 2024, 36(6): 1452-1467. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
