

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (9): 2100-2112.doi: 10.16182/j.issn1004731x.joss.23-0536
Previous Articles Next Articles
Yuan Chao1, Zhang Yao1, Zhao Yadong1, Xu Dawei1,2, Yuan Jing3, Zhai Yongjie1
Received:2023-05-08
Revised:2023-07-25
Online:2024-09-15
Published:2024-09-30
Contact:
Zhang Yao
CLC Number:
Yuan Chao, Zhang Yao, Zhao Yadong, Xu Dawei, Yuan Jing, Zhai Yongjie. Modeling and Simulation of Pipeline Cable Inspection Robot Based on Omnidirectional Wheel[J]. Journal of System Simulation, 2024, 36(9): 2100-2112.

Fig. 1
Underground pipeline cable drawings collected on site

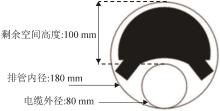
Fig. 2
Available space of pipeline
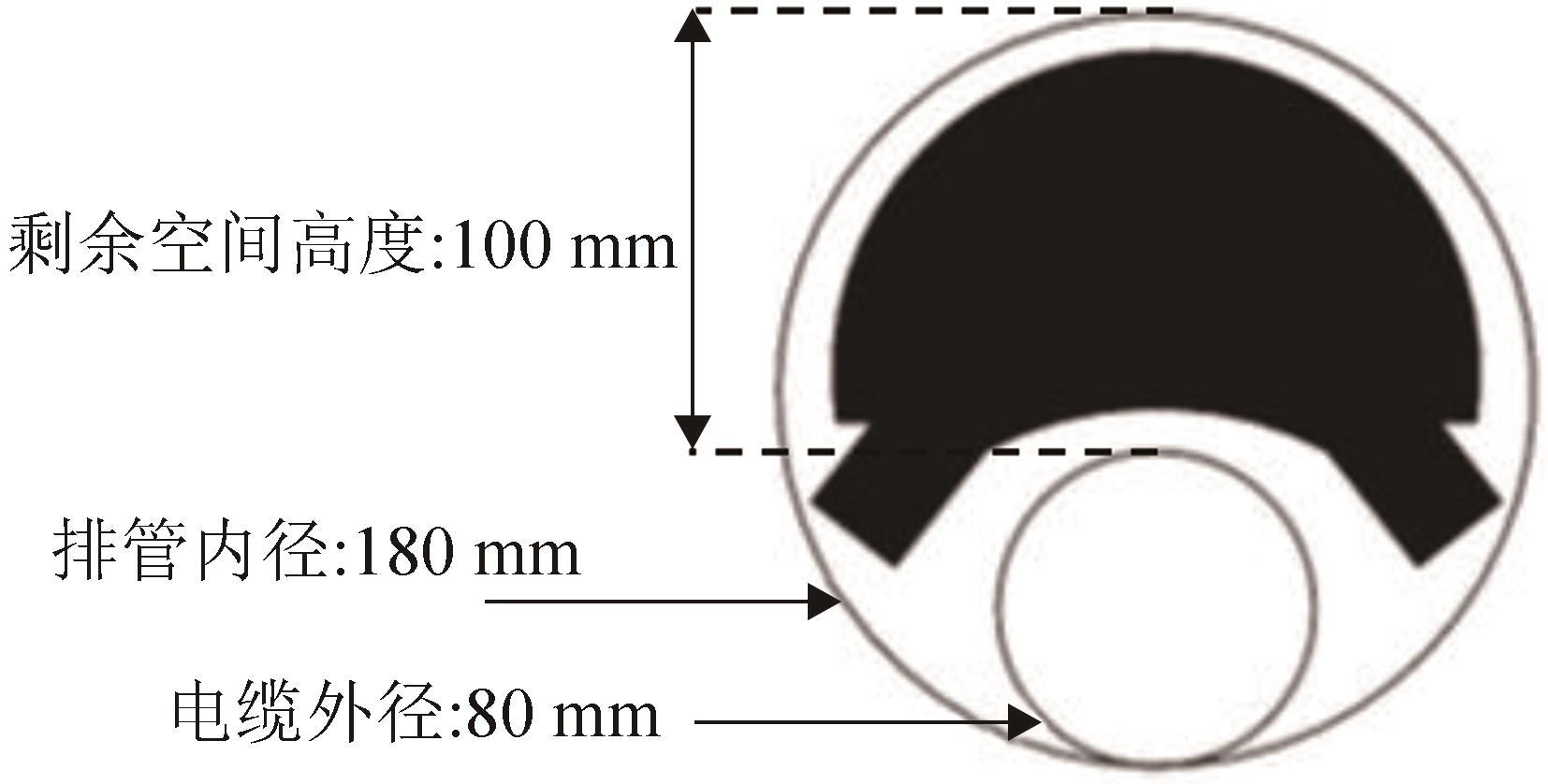

Fig. 3
Cable position distribution
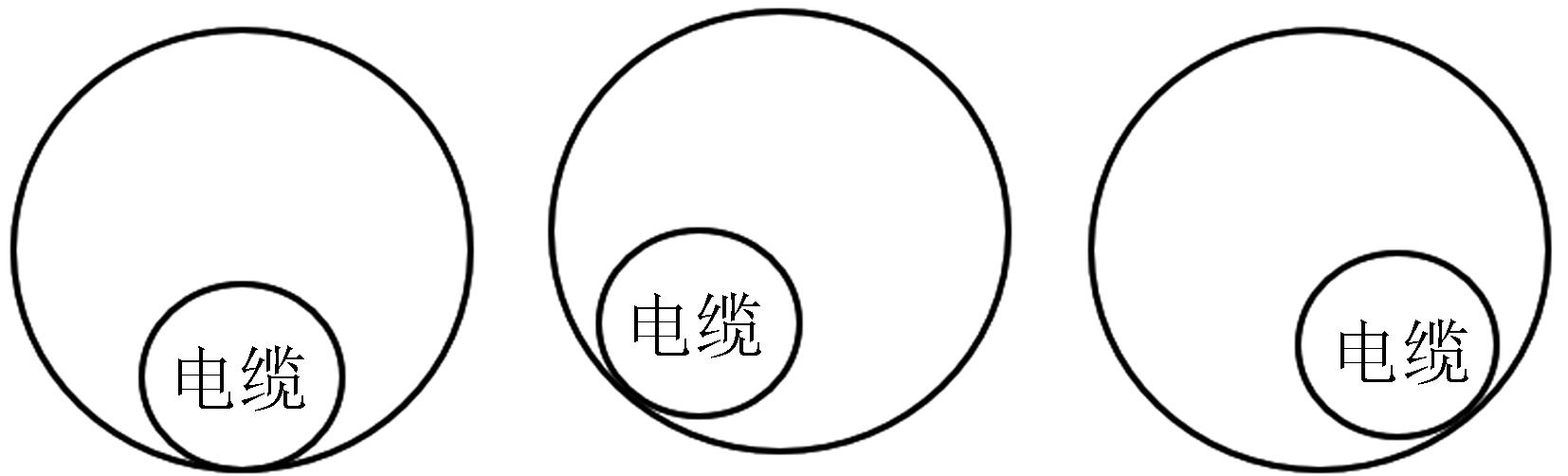
Fig. 4
3D diagram of overall structure of robot
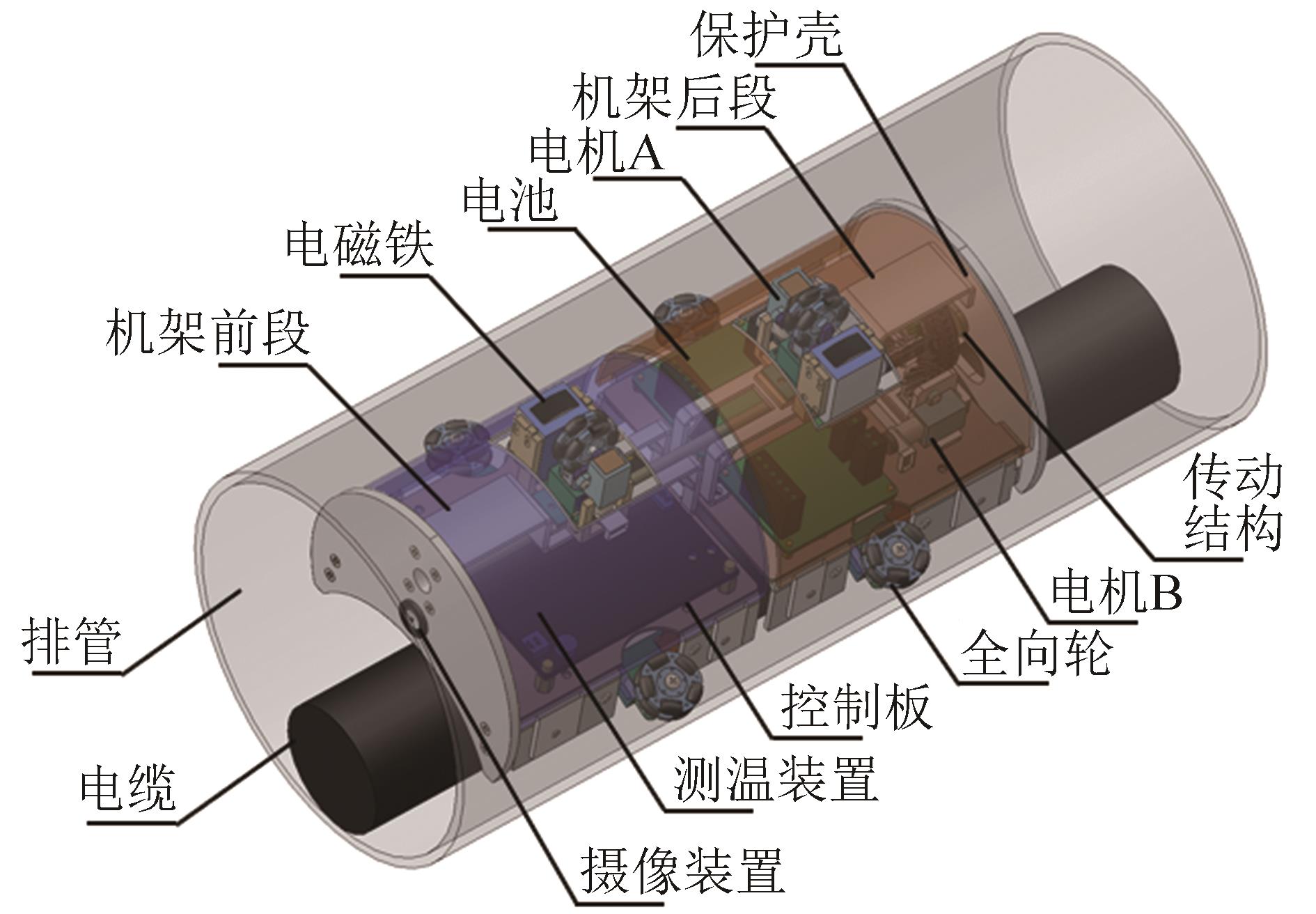
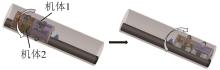
Fig. 5
Attitude adjustment
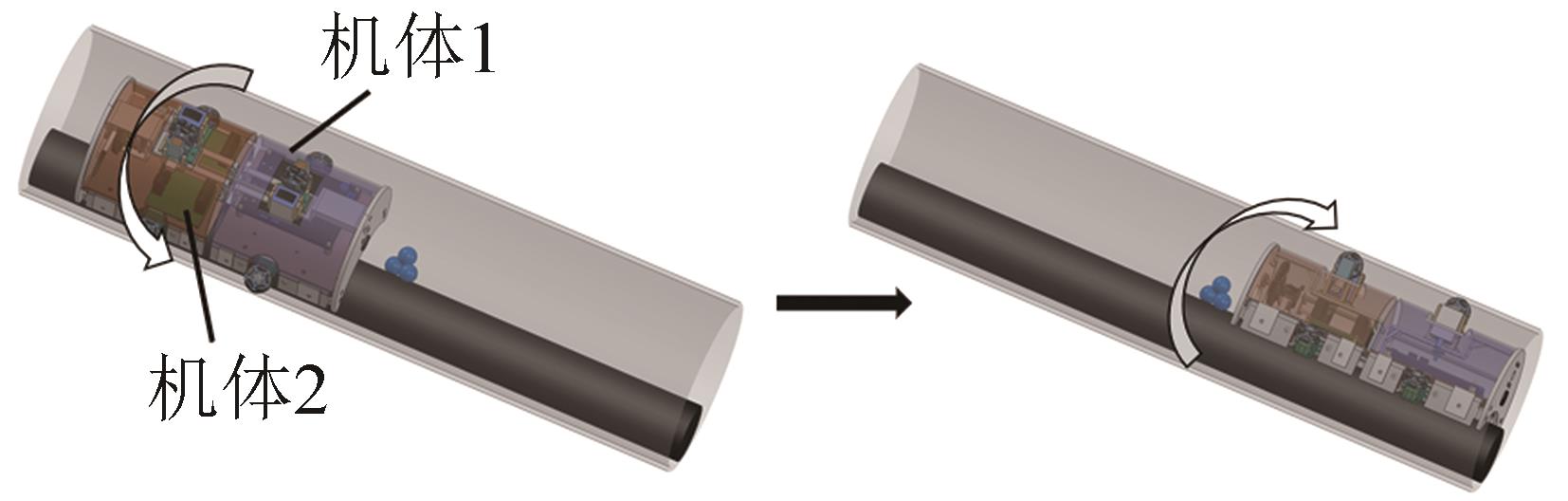
Table 1
Robot state
| 机器人状态 | 电机A | 电机B | 电磁铁 |
|---|---|---|---|
| 直行状态 | 开 | 关 | 关 |
| 姿态调整 | 关 | 开 | 开/关 |
| 停止状态 | 关 | 关 | 关 |
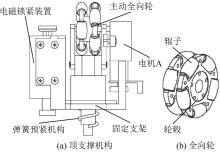
Fig. 6
Robot roof support walking mechanism
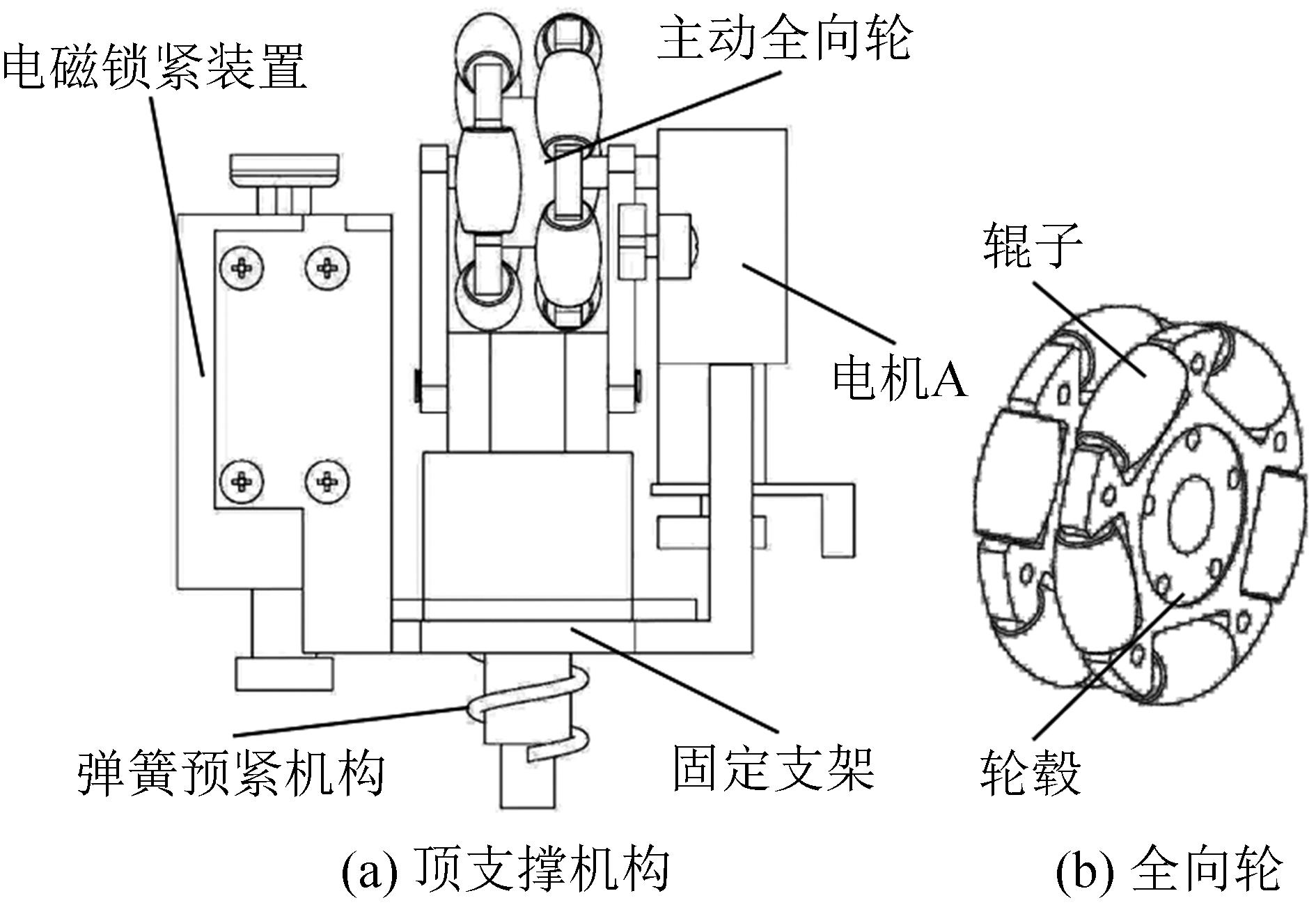
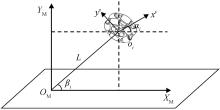
Fig. 7
Position relationship between robot center and omnidirectional wheel center
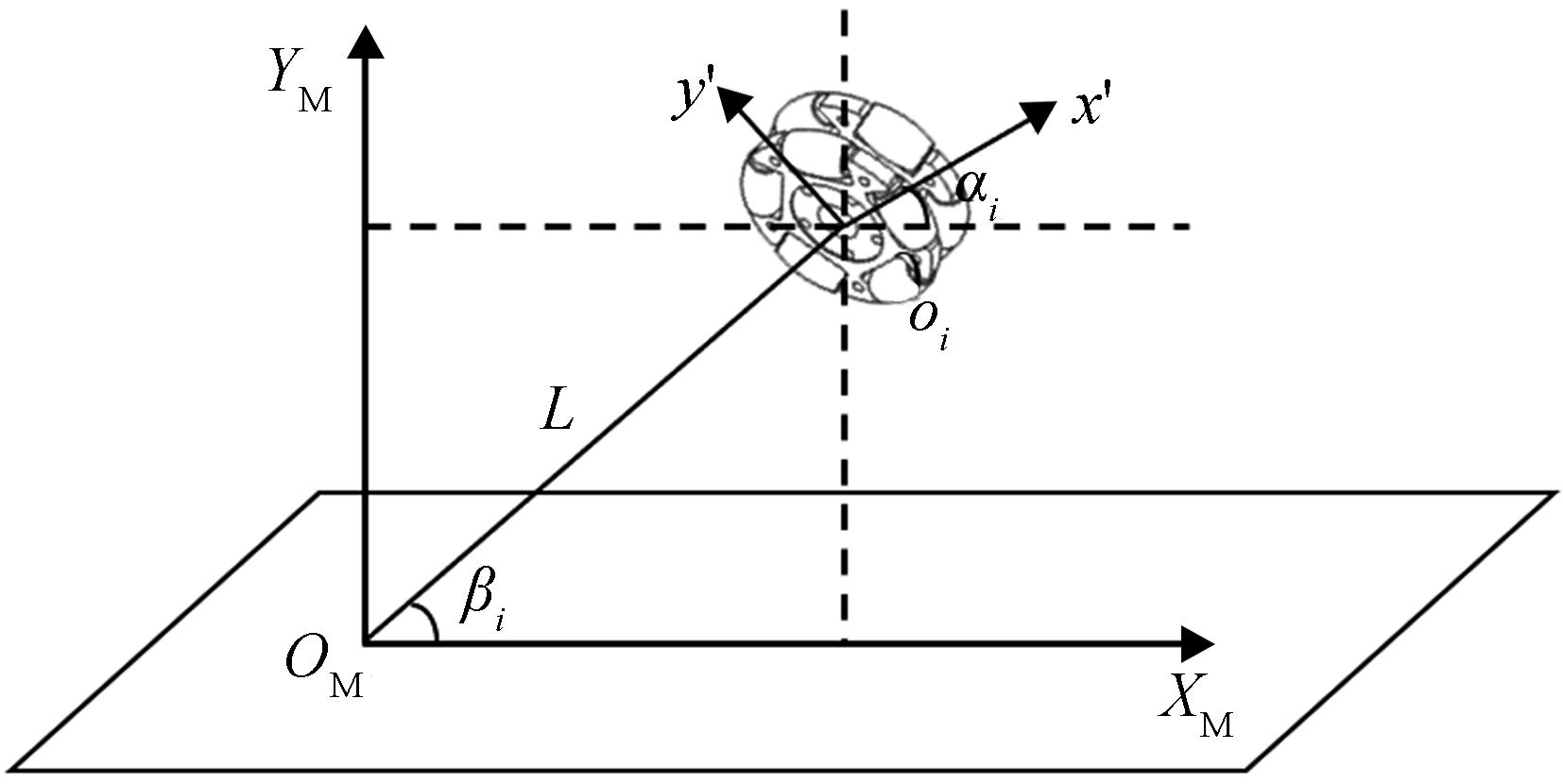
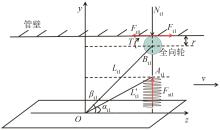
Fig. 8
Force analysis of spring preload mechanism
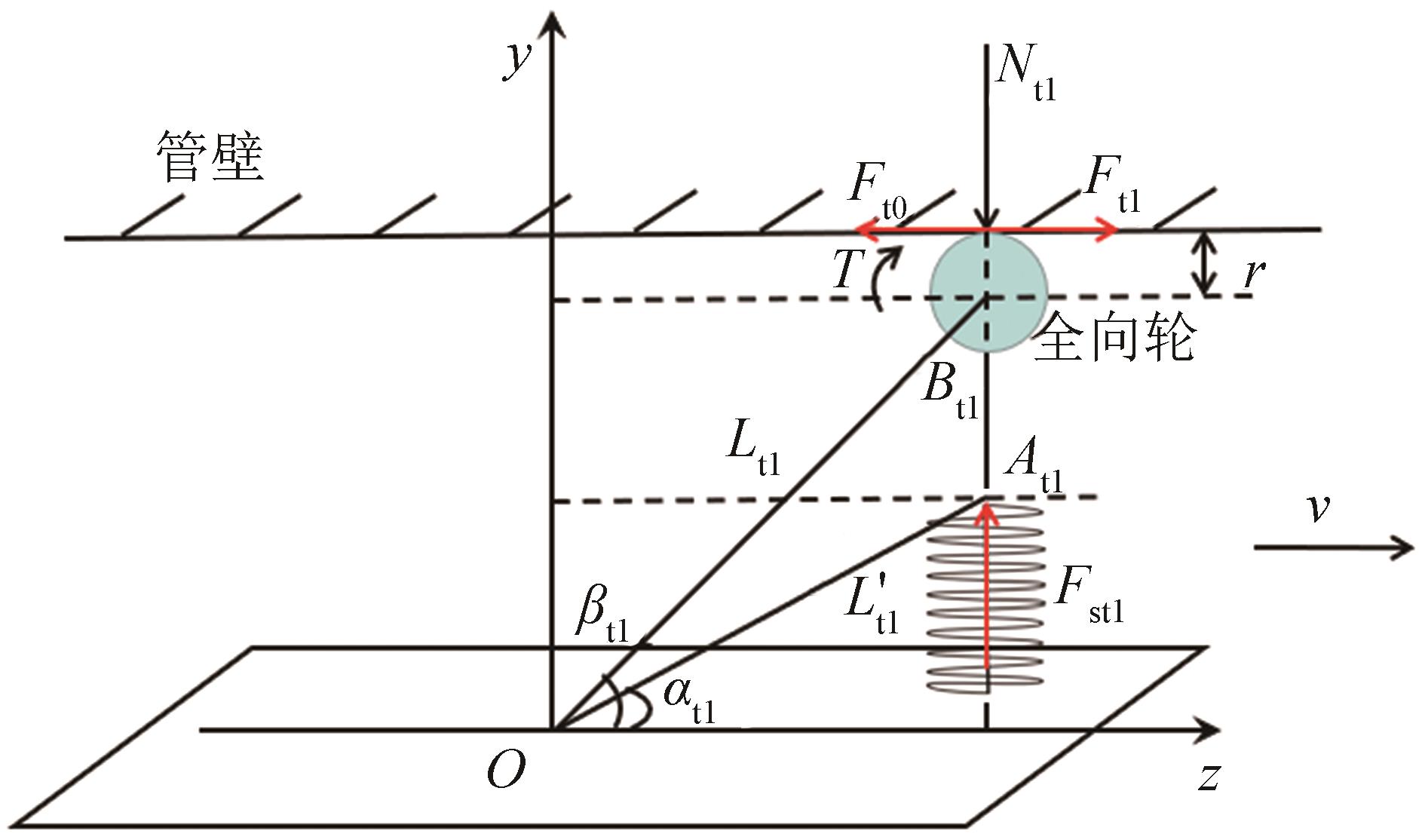
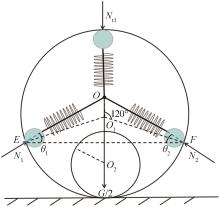
Fig. 9
Force analysis of body 1 in xy section of pipeline
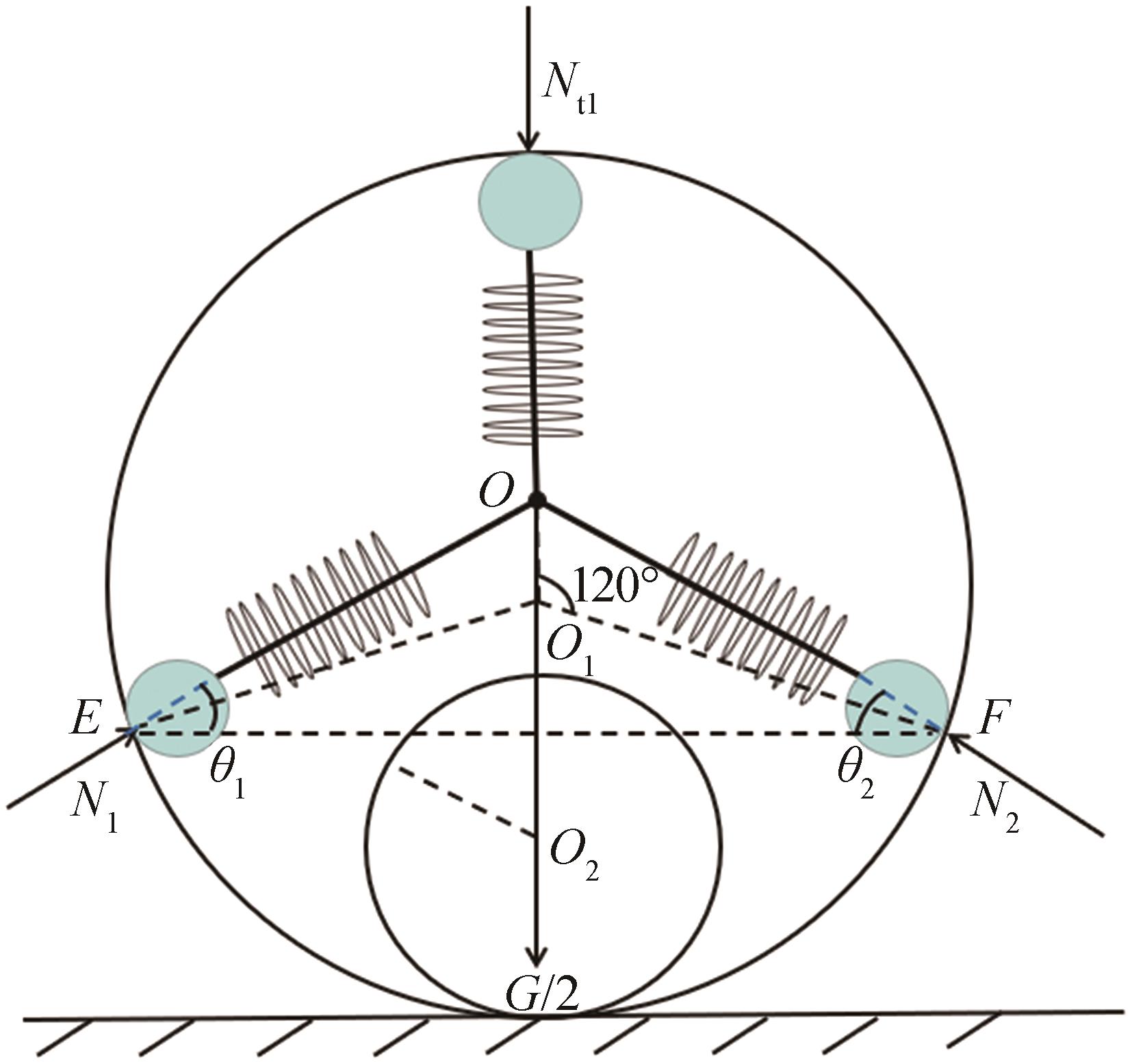

Fig. 10
Force analysis of body 1 after rotation ψ angle
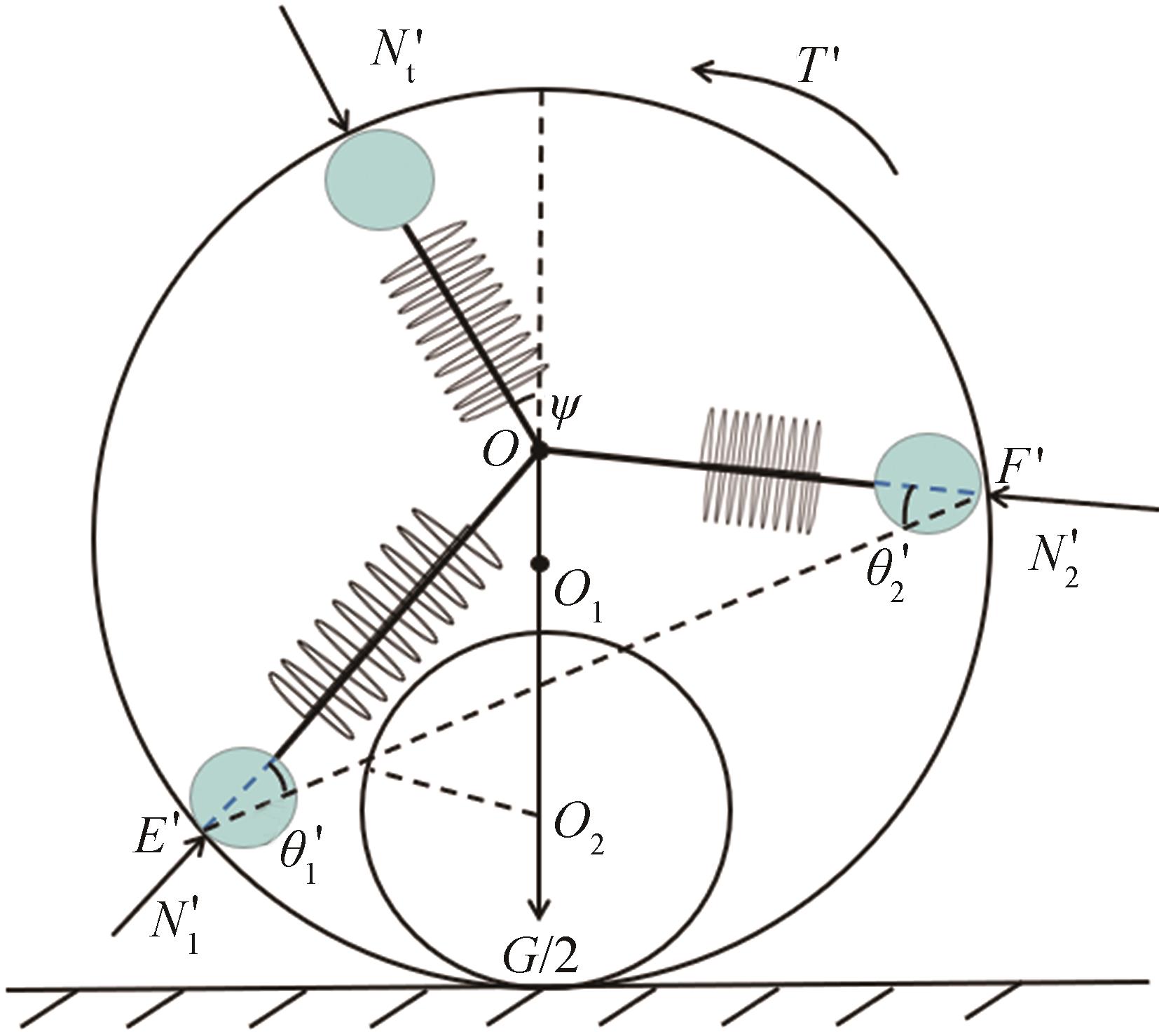
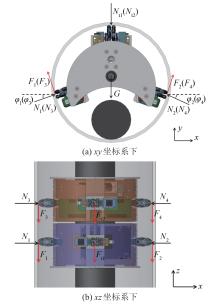
Fig. 11
Robot overall force analysis
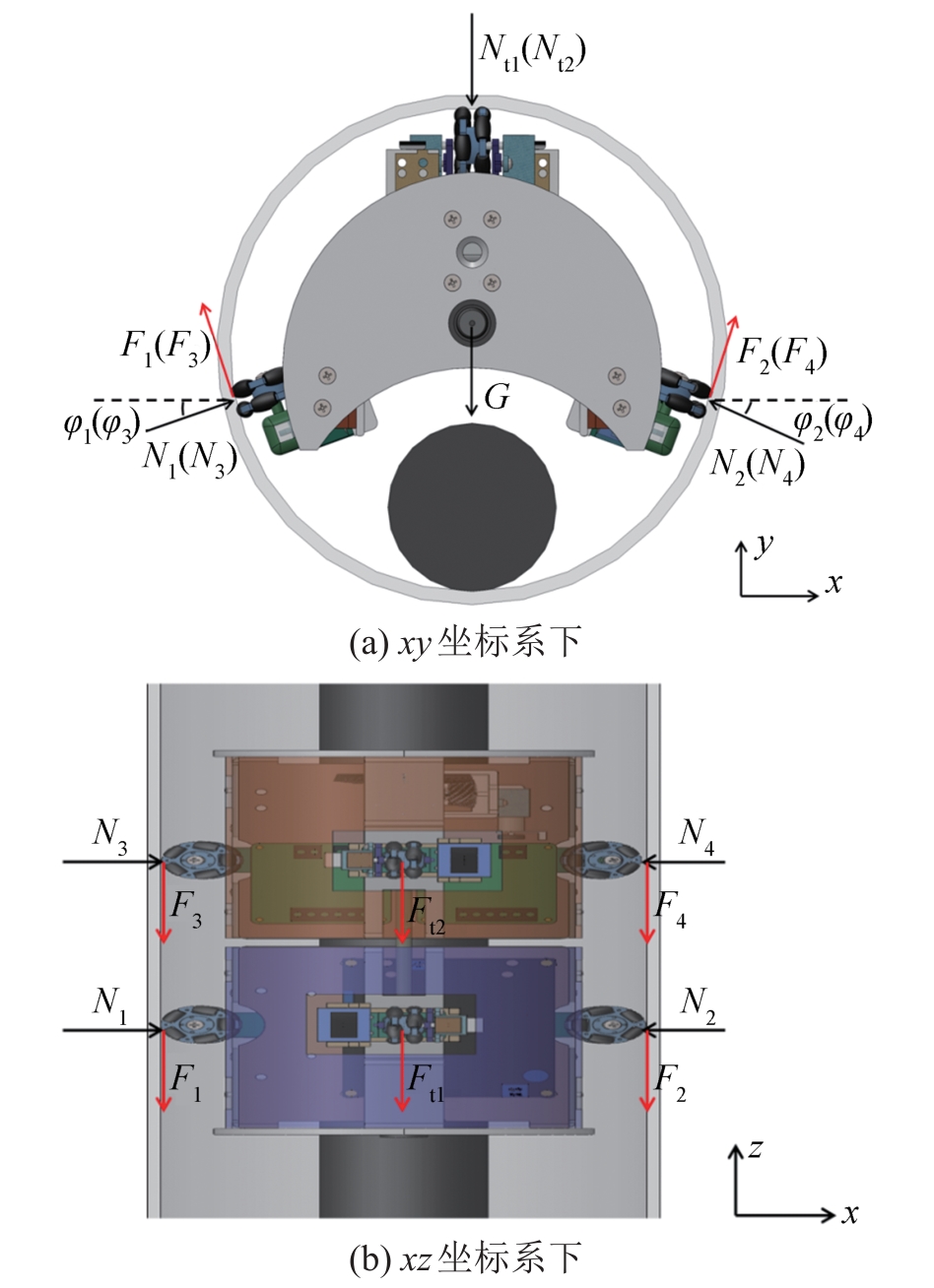
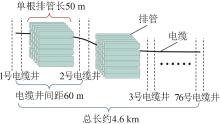
Fig.12
Layout diagram of a certain cable route
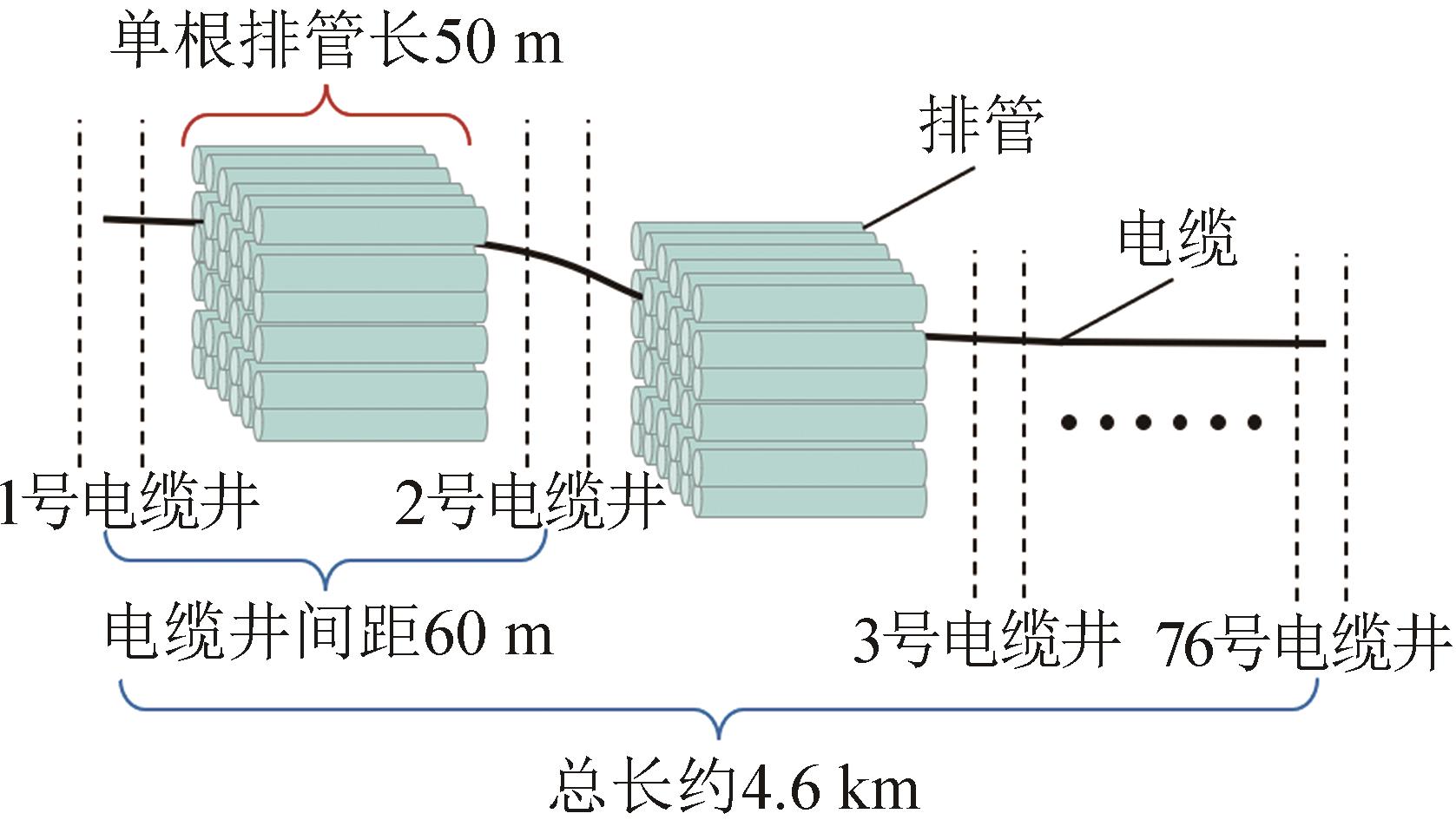
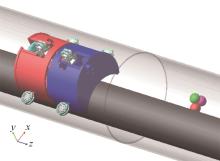
Fig. 13
ADAMS robot simulation model and environment
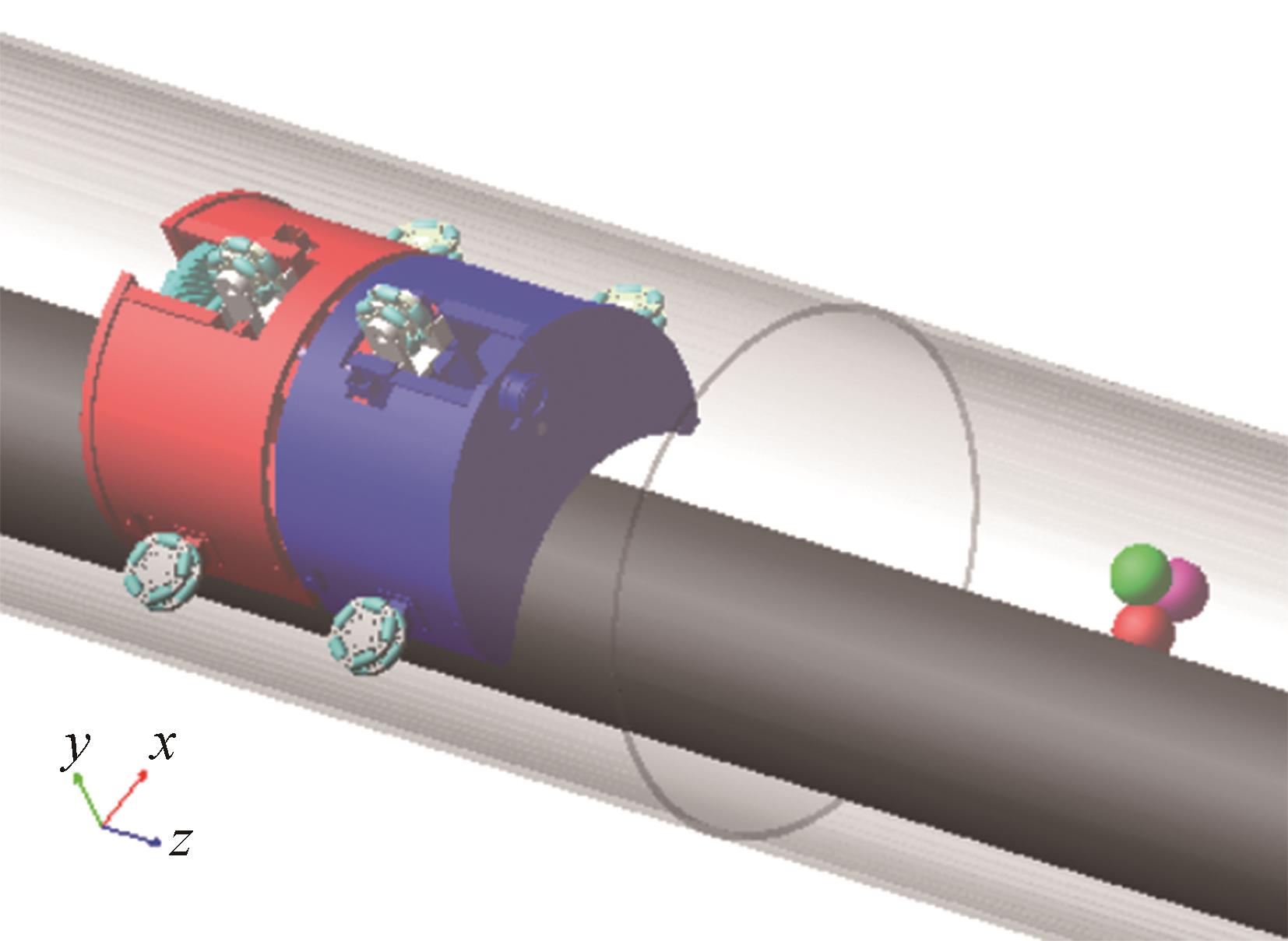
Table 2
Correlation simulation parameter
| 主要参数 | 量值 |
|---|---|
| 排管直径/mm | 180 |
| 电缆直径/mm | 80 |
| 机器人长度/mm | 310 |
| 机器人平均速度/(mm·s-1) | 140 |
| 机器人外轮廓直径/mm | 75 |
| 弹簧刚度系数/(N·mm-1) | 2 |
| 弹簧预载力/N | 2 |
| 摩擦因数 | 0.75 |

Fig. 14
Passability simulation when there are no obstacles
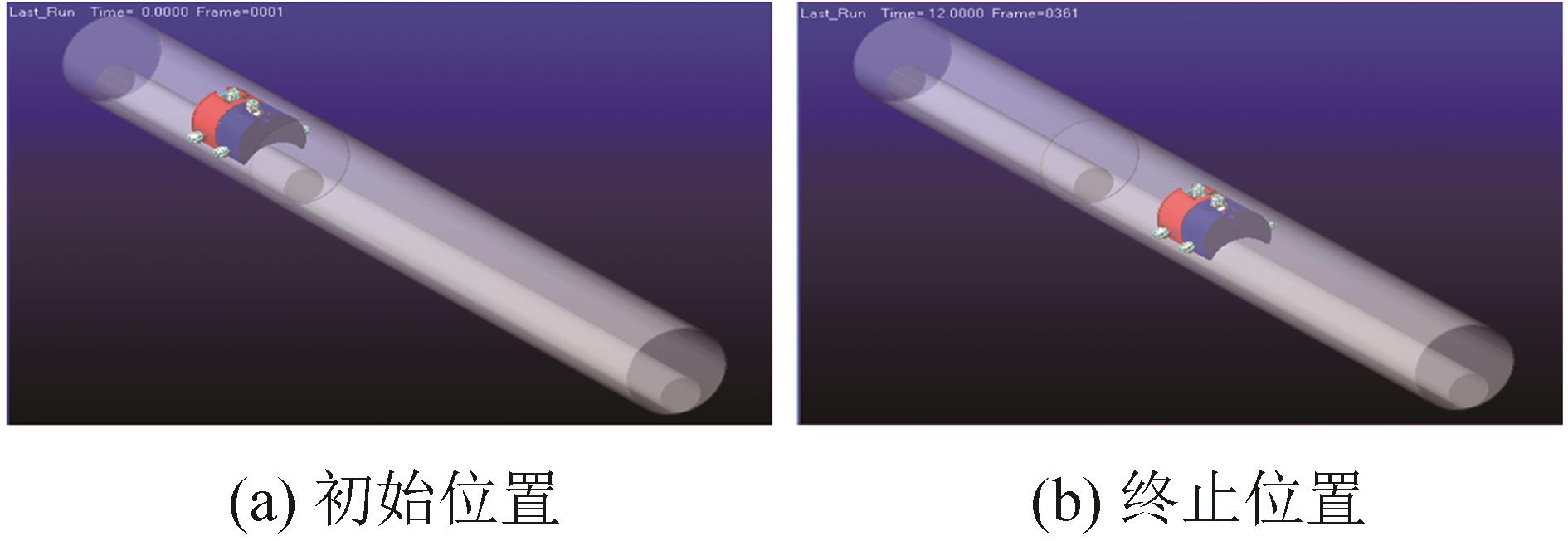
Fig. 15
Simulation result curve when there are no obstacles
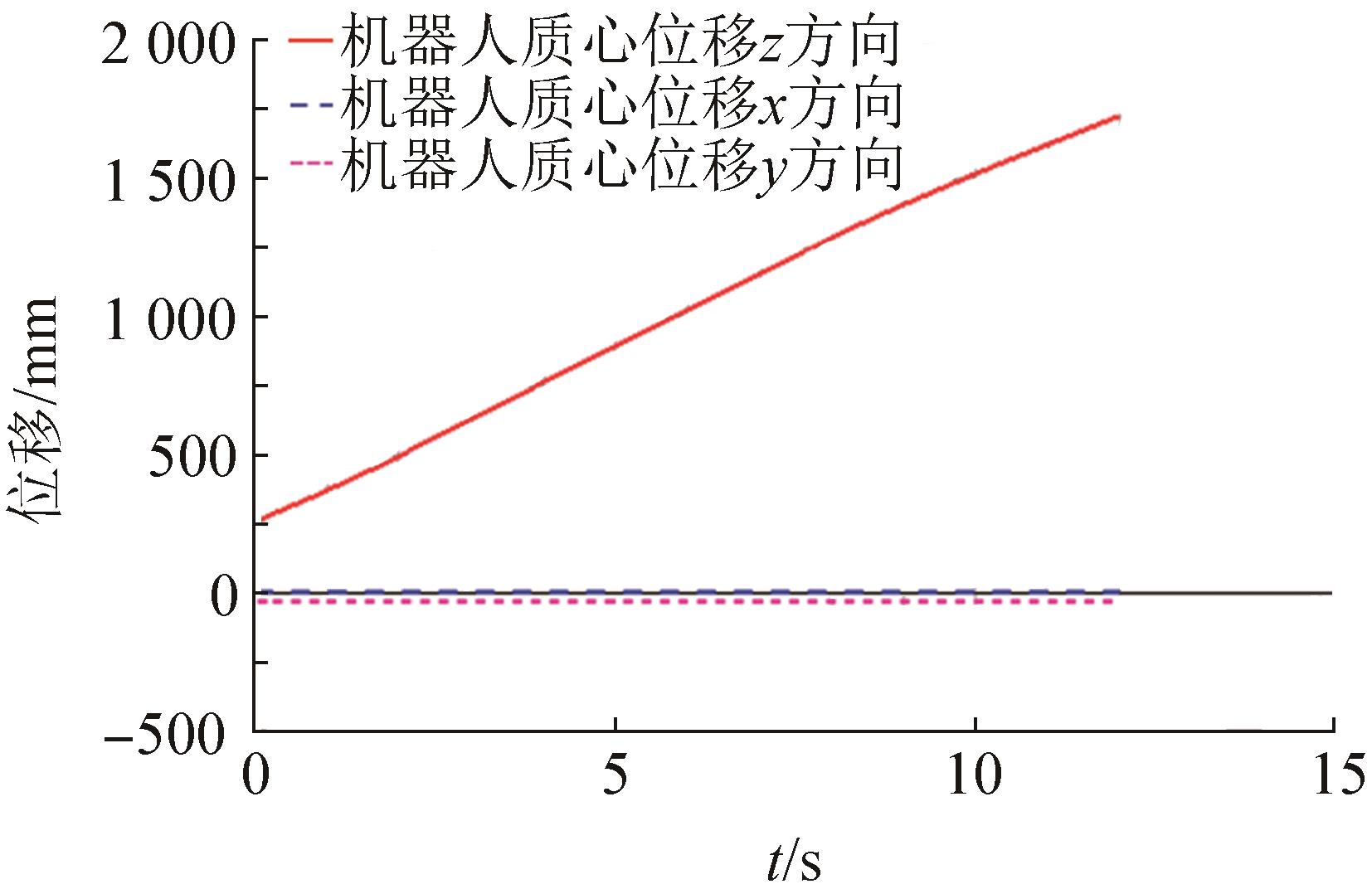
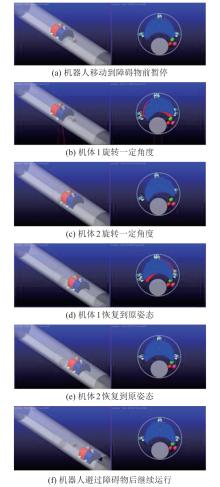
Fig. 16
Robot bbs tacle traversal-simulation
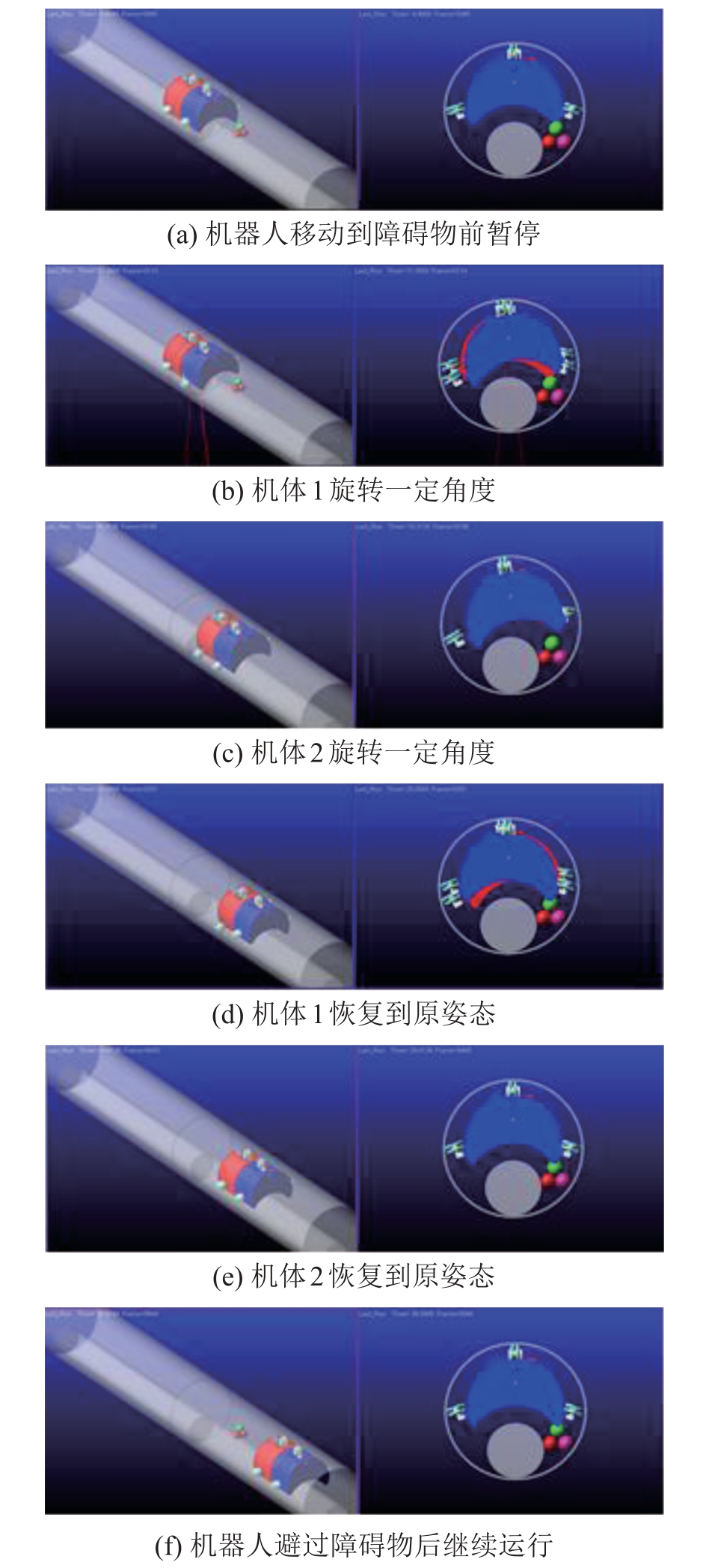

Fig. 17
Displacement curve of centroid of robot in different directions
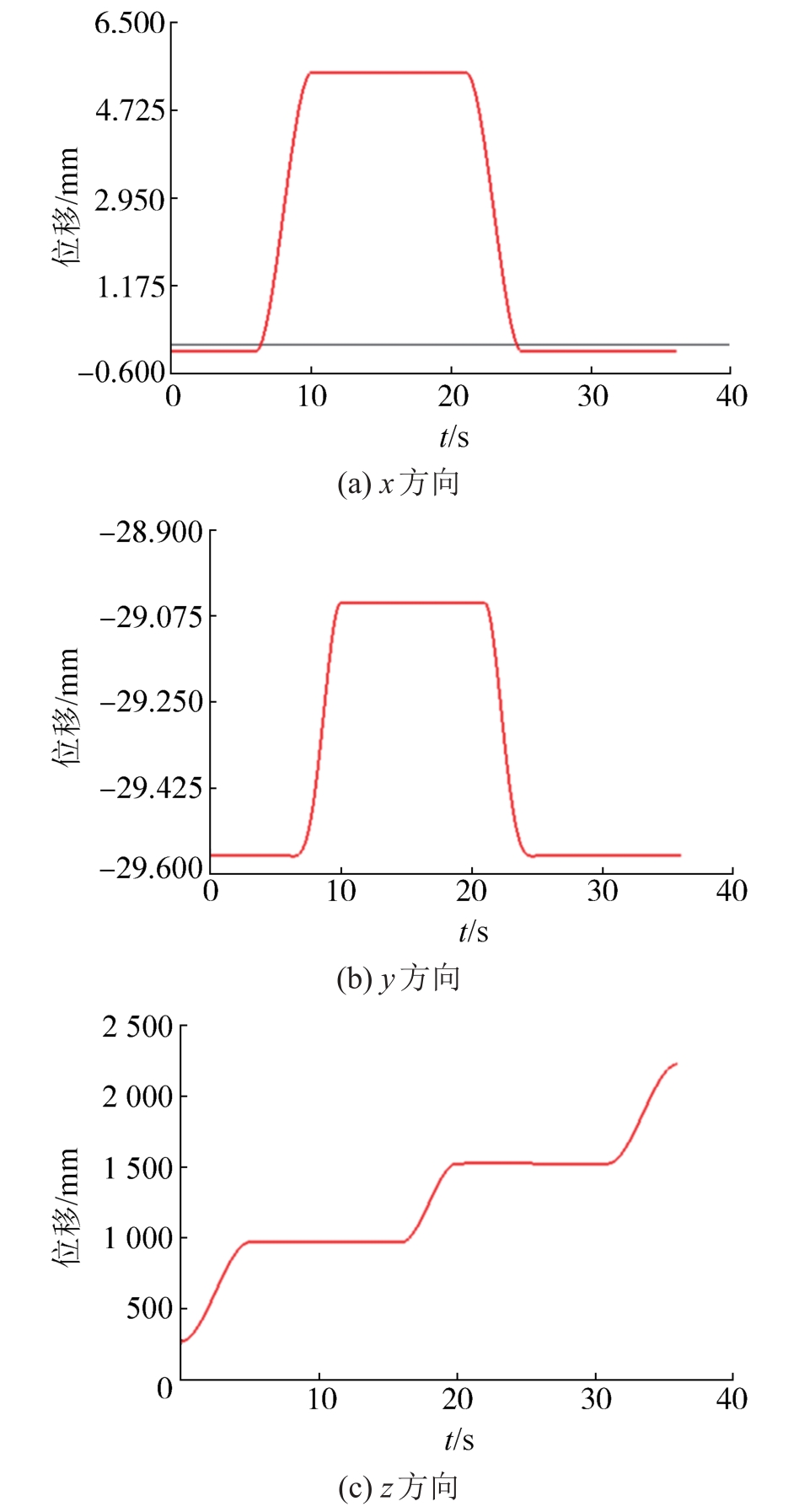
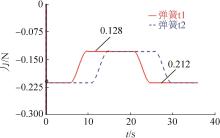
Fig. 18
t1 and t2 elastic force change curve of spring of supporting walking mechanism
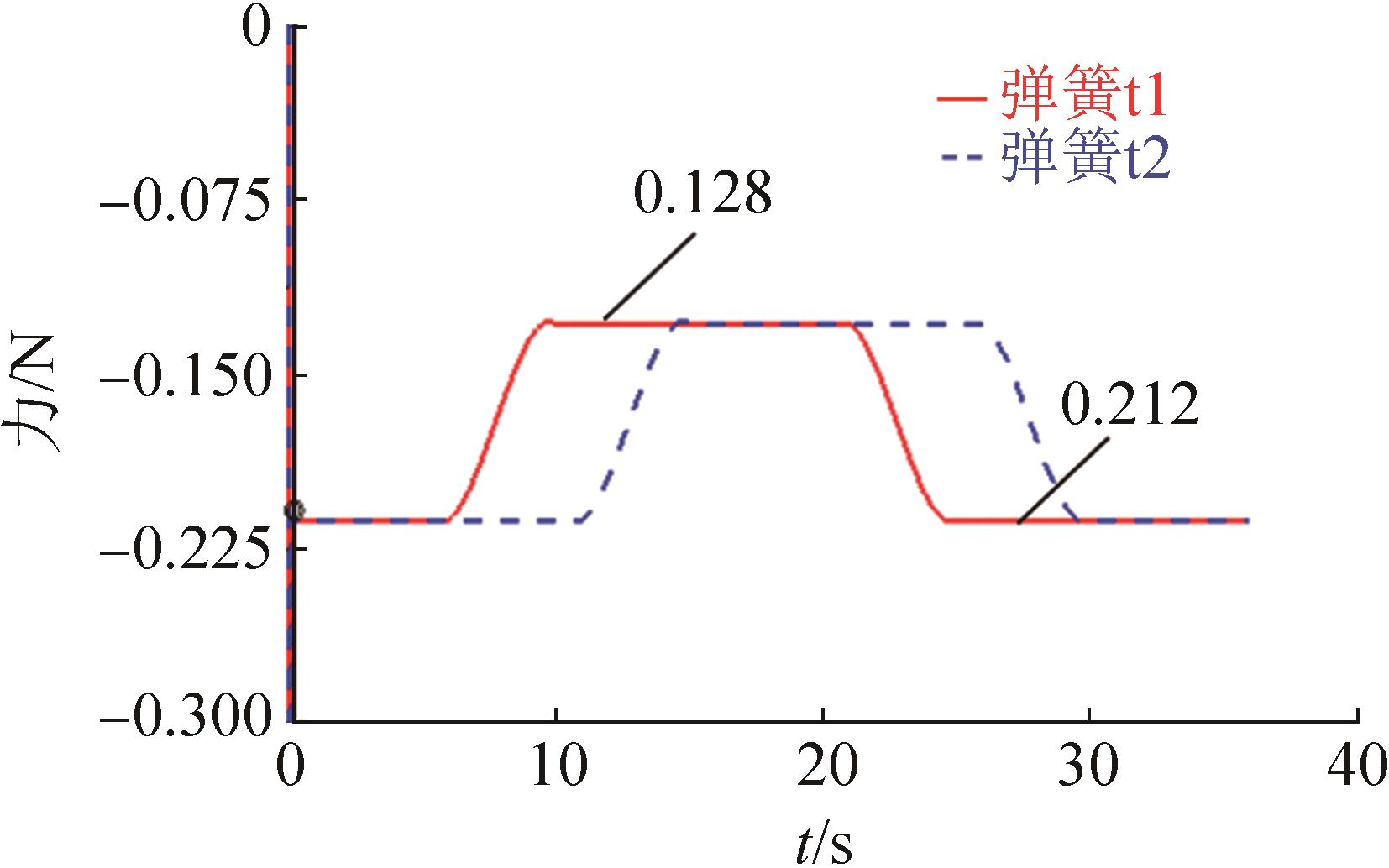
Fig. 19
Centroid displacement curve of body 1 and body 2
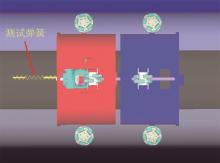
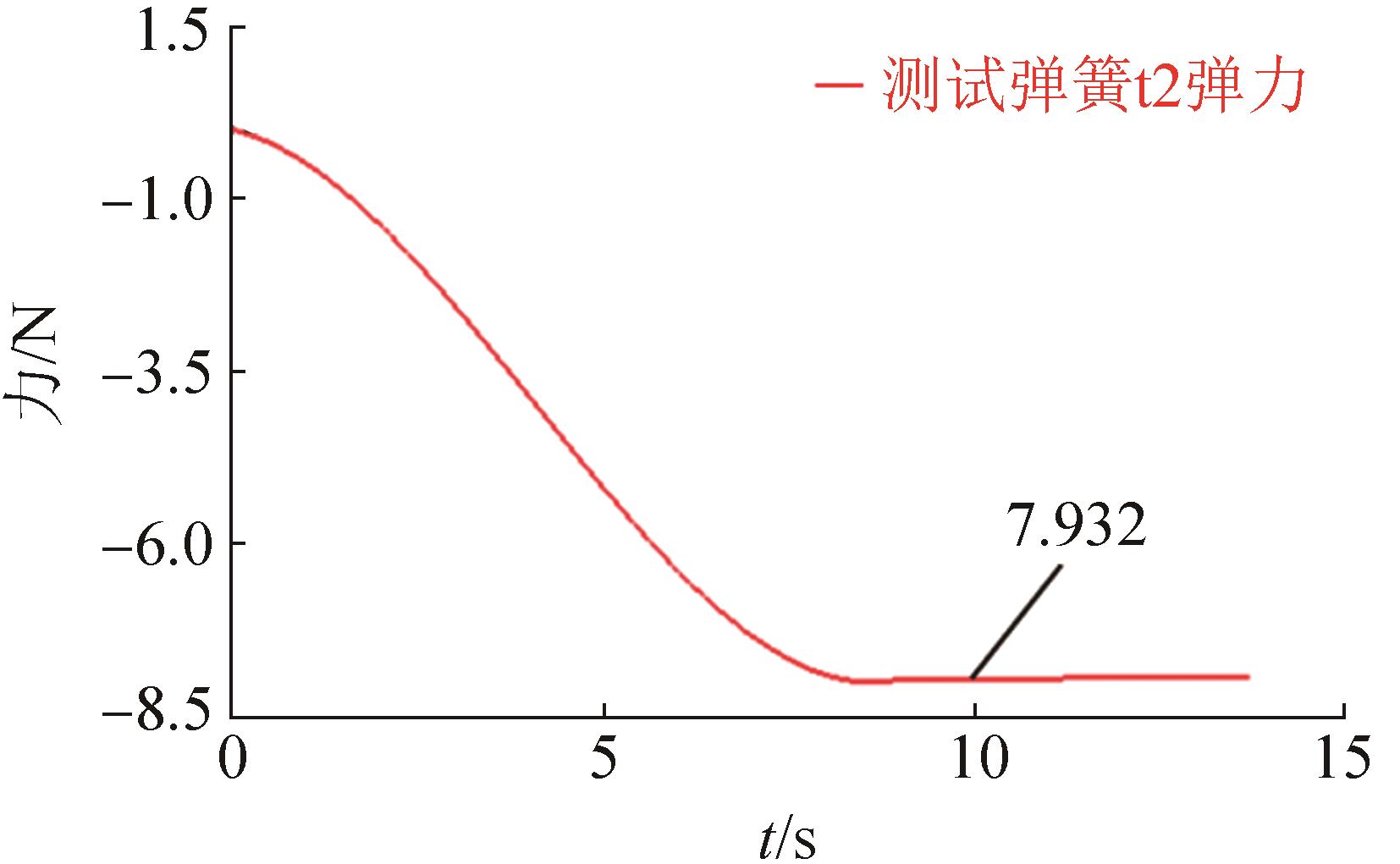
Fig. 20
Add a test spring for simulation
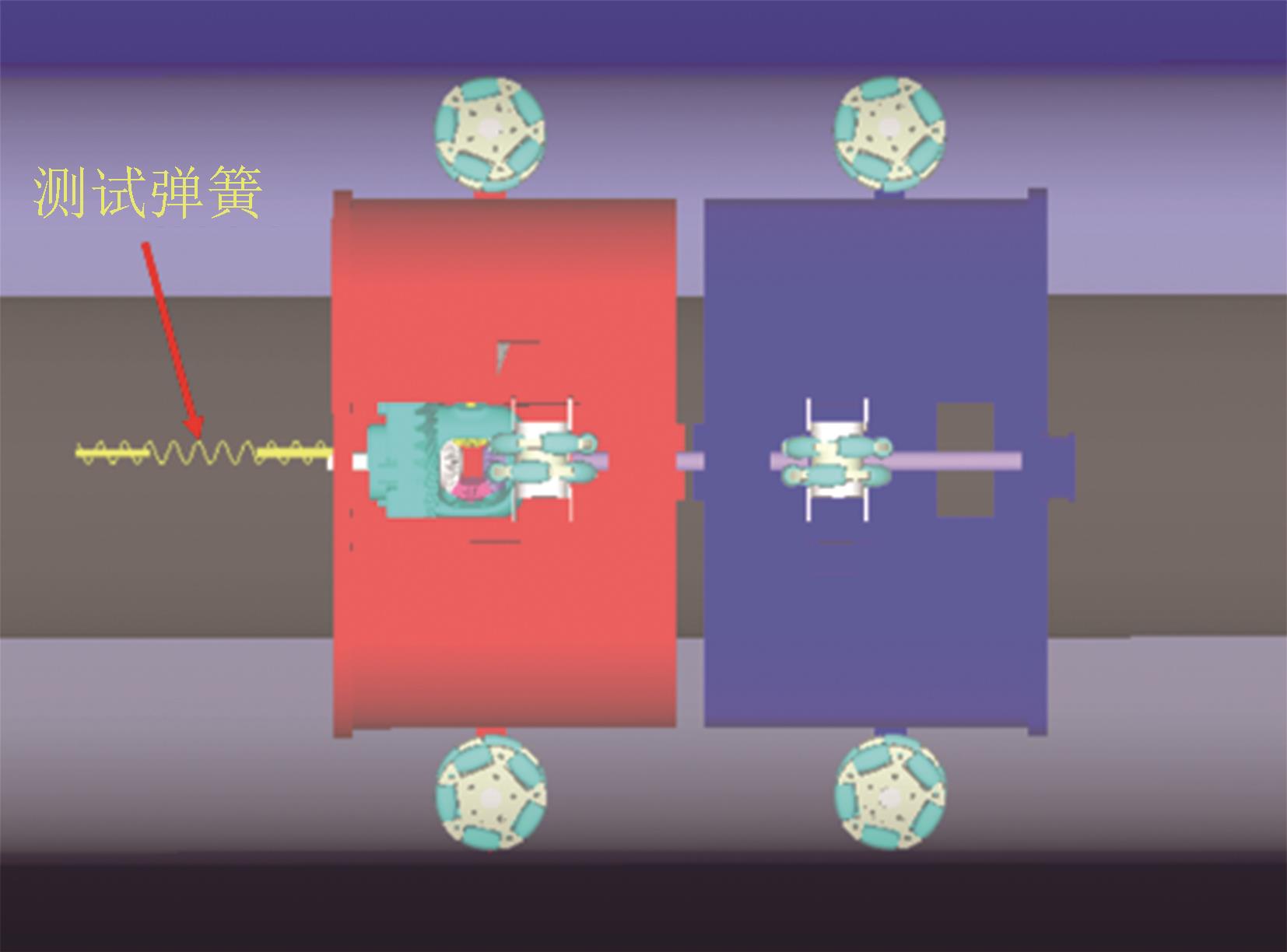
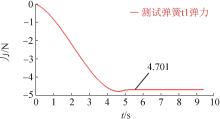
Fig. 21
Simulation results of traction force when robot is in a horizontal posture
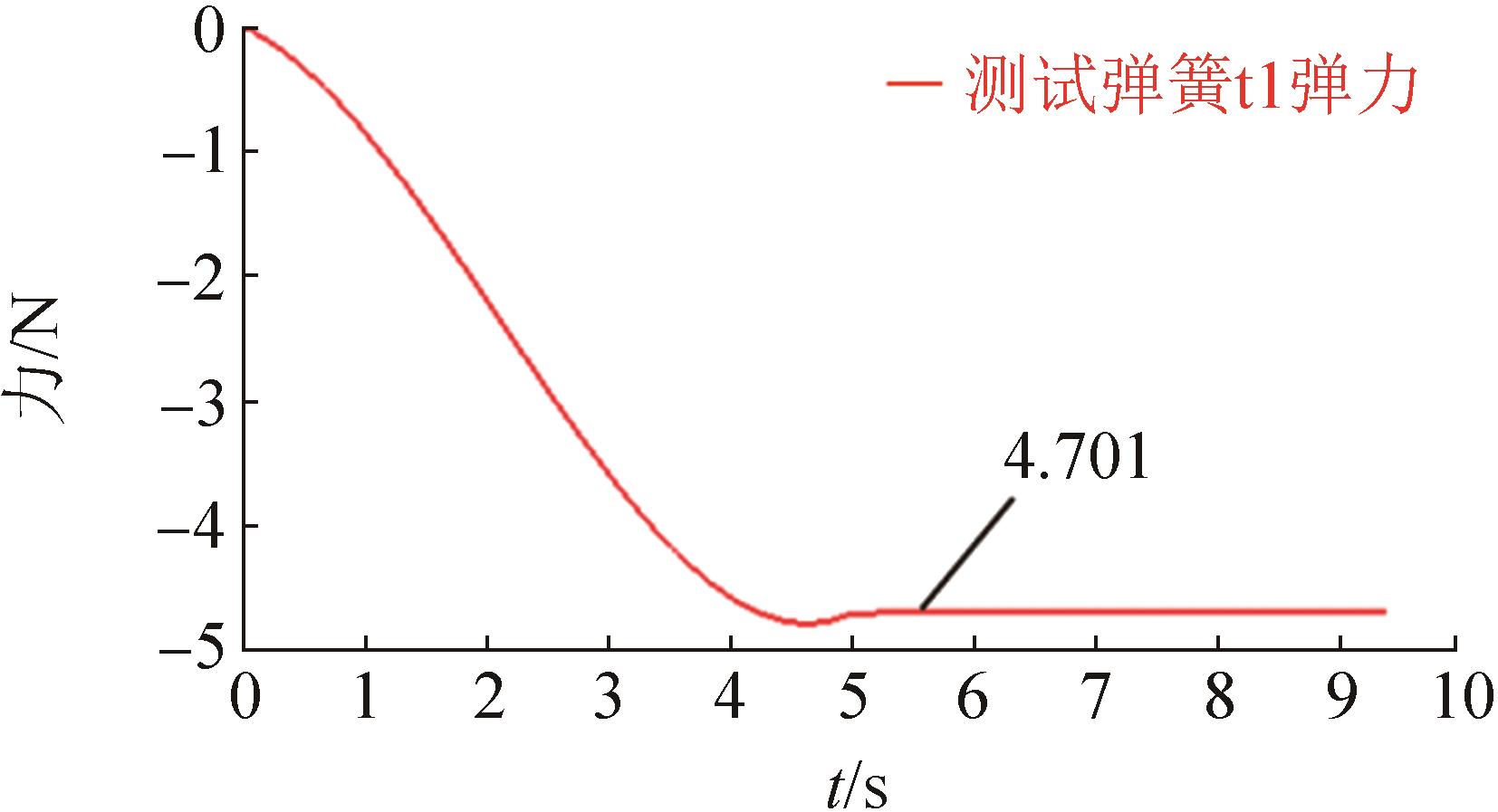

Fig. 22
Diagram of maximum attitude angle
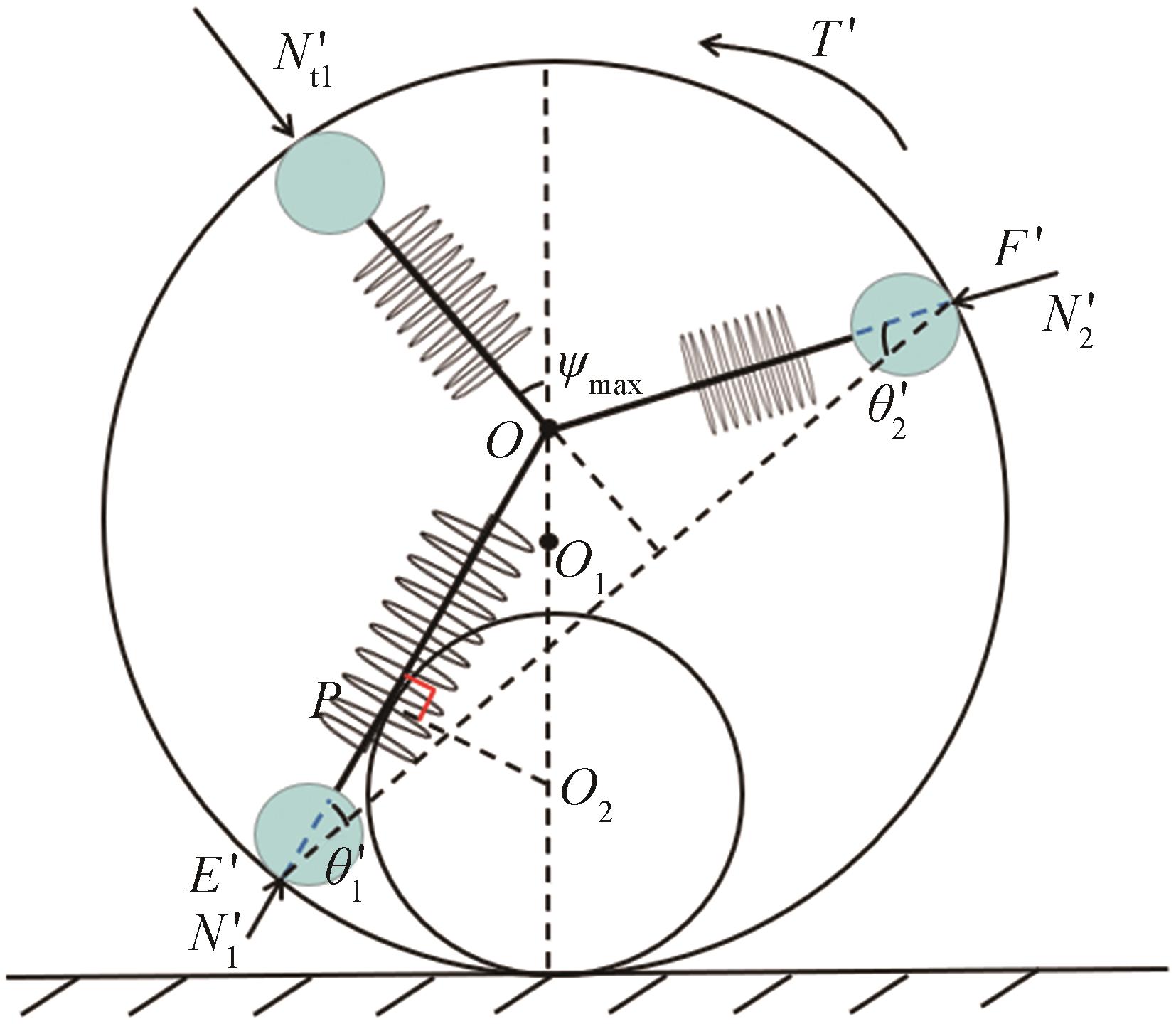
Fig. 23
Simulation results of traction force after robot's posture adjustment
| 1 | 马钊, 刘颖异, 尚宇炜, 等. CIGRE 2016未来电力系统及主动配电系统技术新动向[J]. 中国电机工程学报, 2017, 37(1): 27-35. |
| Ma Zhao, Liu Yingyi, Shang Yuwei, et al. CIGRE 2016 Development Trends of Future Power System and Active Distribution System[J]. Proceedings of the CSEE, 2017, 37(1): 27-35. | |
| 2 | Somsak Tanachai, Suwanasri Thanapong, Suwanasri Cattareeya, et al. Remaining Useful Life Estimation for Underground Cable Systems Based on Historical Health Index[J]. Energies, 2022, 15(24): 9447. |
| 3 | 白承栋. 内径自适应管道机器人设计与运动性能分析[D]. 大连: 大连理工大学, 2022. |
| Bai Chengdong. Design and Kinematic Performance Analysis of Self-adaptive Inner Diameter Pipeline Robot[D]. Dalian: Dalian University of Technology, 2022. | |
| 4 | 米红甫, 张小梅, 杨文璟, 等. 城市地下综合管廊电缆舱火灾概率分析方法[J]. 中国安全科学学报, 2021, 31(1): 165-172. |
| Mi Hongfu, Zhang Xiaomei, Yang Wenjing, et al. Fire Probability Analysis Method of Cable Cabin in Urban Utility Tunnel[J]. China Safety Science Journal, 2021, 31(1): 165-172. | |
| 5 | 闫佳文, 黄继杰, 周磊, 等. 基于多时间尺度和VR的输电线运检培训仿真[J]. 系统仿真学报, 2022, 34(2): 212-220. |
| Yan Jiawen, Huang Jijie, Zhou Lei, et al. Transmission Line Operation and Inspection Training Simulation Based on Multiple Time Scales and VR[J]. Journal of System Simulation, 2022, 34(2): 212-220. | |
| 6 | Yun Seok Choi, Moon Kim Ho, Hyeong Min Mun, et al. Recognition of Pipeline Geometry by Using Monocular Camera and PSD Sensors[J]. Intelligent Service Robotics, 2017, 10(3): 213-227. |
| 7 | Waleed Danial, Syed Hamdan Mustafa, Mukhopadhyay Shayok, et al. An in-pipe Leak Detection Robot with a Neural-network-based Leak Verification System[J]. IEEE Sensors Journal, 2019, 19(3): 1153-1165. |
| 8 | Kazeminasab S, Akbari A, Jafari R, et al. Design, Characterization, and Control of a Size Adaptable in-pipe Robot for Water Distribution Systems[C]//2021 22nd IEEE International Conference on Industrial Technology (ICIT). Piscataway: IEEE, 2021: 39-46. |
| 9 | Brown L, Carrasco J, Watson S, et al. Elbow Detection in Pipes for Autonomous Navigation of Inspection Robots[J]. Journal of Intelligent & Robotic Systems, 2019, 95(2): 527-541. |
| 10 | Nasibullayev Ildar, Darintsev Oleg, Bogdanov Dinar. In-pipe Modular Robot: Configuration, Displacement Principles, Standard Patterns and Modeling[C]//Electromechanics and Robotics. Singapore: Springer Singapore, 2022: 85-96. |
| 11 | 唐德威, 李庆凯, 姜生元, 等. 三轴差速式管道机器人过弯管时的差速特性及拖动力分析[J]. 机器人, 2010, 32(1): 91-96. |
| Tang Dewei, Li Qingkai, Jiang Shengyuan, et al. Differential Property and Traction Force of Tri-axial Differential Pipeline Robot in Elbow[J]. Robot, 2010, 32(1): 91-96. | |
| 12 | 梁亮, 胡冠昱, 朱宗铭, 等. 内外螺旋管道机器人的动力学建模和数值仿真[J]. 系统仿真学报, 2013, 25(11): 2546-2551. |
| Liang Liang, Hu Guanyu, Zhu Zongming, et al. Dynamics Modeling and Numerical Simulation of Inner and Outer Spiral in-pipe Robots[J]. Journal of System Simulation, 2013, 25(11): 2546-2551. | |
| 13 | 闫宏伟, 焦彪彪, 马建强, 等. 一种管道机器人的自适应主动螺旋式驱动机理分析[J]. 中国机械工程, 2018, 29(1): 21-29. |
| Yan Hongwei, Jiao Biaobiao, Ma Jianqiang, et al. Adaptive Active Screw Driving Mechanism Analysis for Pipeline Robots[J]. China Mechanical Engineering, 2018, 29(1): 21-29. | |
| 14 | 罗继曼, 戴璐璐, 印辉, 等. 管道清淤机器人协调运动控制系统的设计[J]. 沈阳建筑大学学报(自然科学版), 2021, 37(3): 556-562. |
| Luo Jiman, Dai Lulu, Yin Hui, et al. Design on Coordinated Motion Control System of Pipe Dredging Robot[J]. Journal of Shenyang Jianzhu University(Natural Science), 2021, 37(3): 556-562. | |
| 15 | 刘洪斌, 冀楠. 蠕动式管道机器人结构设计与运动特性分析[J]. 哈尔滨工程大学学报, 2022, 43(8): 1169-1177. |
| Liu Hongbin, Ji Nan. Structural Design and Motion Characteristics Analysis of Peristaltic Pipeline Robots[J]. Journal of Harbin Engineering University, 2022, 43(8): 1169-1177. | |
| 16 | 李智强, 李卫国, 冯志成, 等. 管道机器人结构与通过性分析[J]. 机械传动, 2021, 45(6): 146-152. |
| Li Zhiqiang, Li Weiguo, Feng Zhicheng, et al. Structural and Passability Analysis of Pipeline Robot[J]. Journal of Mechanical Transmission, 2021, 45(6): 146-152. | |
| 17 | 陈潇, 吴志鹏, 何思宇, 等. 自适应支撑式管道检测机器人的通过性设计[J]. 中南大学学报(自然科学版), 2018, 49(12): 2953-2962. |
| Chen Xiao, Wu Zhipeng, He Siyu, et al. Passing Property Design of Adaptive Support Pipeline Detection Robot[J]. Journal of Central South University(Science and Technology), 2018, 49(12): 2953-2962. | |
| 18 | Rubies Elena, Palacín Jordi. Design and FDM/FFF Implementation of a Compact Omnidirectional Wheel for a Mobile Robot and Assessment of ABS and PLA Printing Materials[J]. Robotics, 2020, 9(2): 43. |
| 19 | Hijikata Masaaki, Miyagusuku Renato, Ozaki Koichi. Wheel Arrangement of Four Omni Wheel Mobile Robot for Compactness[J]. Applied Sciences, 2022, 12(12): 5798. |
| 20 | 李颀, 汪伟. 多全向轮协同分拣平台的路径规划[J]. 系统仿真学报, 2021, 33(3): 698-709. |
| Li Qi, Wang Wei. Path Designing of Multi-omnidirectional Wheel Collaborative Sorting Platform[J]. Journal of System Simulation, 2021, 33(3): 698-709. | |
| 21 | Tu Qing, Liu Qingyou, Ren Tao, et al. Obstacle Crossing and Traction Performance of Active and Passive Screw Pipeline Robots[J]. Journal of Mechanical Science and Technology, 2019, 33(5): 2417-2427. |
| 22 | 吴伟, 李博, 刘娜娜, 等. 轮式牵引机器人优化设计及运动特性分析[J]. 系统仿真学报, 2020, 32(5): 918-926. |
| Wu Wei, Li Bo, Liu Nana, et al. Optimization Design and Locomotion Characteristics Analysis of Wheeled Traction Robot[J]. Journal of System Simulation, 2020, 32(5): 918-926. |
| [1] | Li Xiaonan, Chao Tao, Ma Ping, Yang Ming, Wang Yuxuan. Robust Identification of Black-box Nonlinear SSM Using Expectation-maximization [J]. Journal of System Simulation, 2026, 38(5): 1146-1158. |
| [2] | Wang Jun, Liu Min, Zhang Xiaochuan, Ding Yishan, Feng Juhui, Zhuang Ye. Modelling Method of Unmanned Vehicle Dynamics Based on Neural Network [J]. Journal of System Simulation, 2026, 38(4): 932-947. |
| [3] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [4] | Xie Xueyuan, Lin Chen, Wu Han, Zhao Qinglan, Gao Junfei, Hao Qiangguo, Zheng Xinqian. Research on Joint Simulation of Special Vehicle Engine Operation Characteristics Based on Virtual Driving Scenarios [J]. Journal of System Simulation, 2025, 37(8): 2163-2175. |
| [5] | Hu yang, Li Zihao, Fu Deyi, Song Ziqiu, Fang Fang, Liu Jizhen. Deep Learning Modeling of Multi-scale Characteristics of Large-scale Wind Turbine Gearbox [J]. Journal of System Simulation, 2025, 37(10): 2454-2468. |
| [6] | Hongbin Liu, Zhiqiang Shen, Yize Wang, Ming Qiu, Wenrong Lin. Application of Digital Twin Model in Grinding of Bearing Rings [J]. Journal of System Simulation, 2023, 35(3): 557-567. |
| [7] | Yu Xiaolan, Xiong Wei, Han Chi, Wu Zhenwei. Research on Operational Effectiveness Evaluation Method of Space-based Information Support Equipment System [J]. Journal of System Simulation, 2023, 35(11): 2429-2444. |
| [8] | Jianlei Liu, Xuejian Jiao, Huaiqian Wang. Development of Vehicle Dynamics Virtual Simulation System Based on CarSim [J]. Journal of System Simulation, 2022, 34(8): 1847-1854. |
| [9] | Yingyan Zhao, Qunsheng Cao, Zhengnan Cao, Jianchun Wang. Realization of Domestic Ship Hydrodynamic Numerical Software on Industrial Cloud Platform [J]. Journal of System Simulation, 2022, 34(8): 1855-1863. |
| [10] | Jing Wang, Ying Dong. Simulation Research on COVID-19 Transmission and Control Measures Based on SEIiRD Model [J]. Journal of System Simulation, 2022, 34(7): 1532-1546. |
| [11] | Wei Chen, Zongping Li, Can Liu, Yanni Ju. Research on the Number of Passengers on the Platform of Rail Transit Station Considering Congestion Propagation [J]. Journal of System Simulation, 2022, 34(7): 1582-1592. |
| [12] | Tong Wu, Qinghui Wang, Zhijia Xu. Study on the Scale Characteristics of Permeability of TPMS Porous Materials [J]. Journal of System Simulation, 2022, 34(5): 1015-1024. |
| [13] | Ou Xie, Aiguo Song, Qixin Zhu. Study on Near-body Pressure Characteristics of Bionic Robotic Fish Undulating in Near Wall Region [J]. Journal of System Simulation, 2022, 34(4): 870-877. |
| [14] | Guangxu Xi, Yongyi Liu, Chong Wu, Junjie Zhang, Yinghao Chen. Key Technology Research on Stall Spin Simulation Training System of an Aircraft [J]. Journal of System Simulation, 2022, 34(4): 878-890. |
| [15] | Shen Zhang, Zewang Yang, Yifan Wang, Liang Sun, Ming Cheng, Fankai Meng, Ting Li. Simulation on Flood Disaster in Urban Building Complex System Based on LBM [J]. Journal of System Simulation, 2022, 34(12): 2584-2594. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
