

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (2): 373-384.doi: 10.16182/j.issn1004731x.joss.22-1220
• Papers • Previous Articles Next Articles
Wang Xinpeng1,3( ), Fu Huiqiao2, Deng Guizhou1,3, Tang Kaiqiang2,3(), Chen Chunlin2, Liu Canghai1,3
), Fu Huiqiao2, Deng Guizhou1,3, Tang Kaiqiang2,3(), Chen Chunlin2, Liu Canghai1,3
Received:2022-10-14
Revised:2022-11-07
Online:2024-02-15
Published:2024-02-04
Contact:
Tang Kaiqiang
E-mail:xpwang@mails.swust.edu.cn;kqtang@smail.nju.edu.cn
CLC Number:
Wang Xinpeng, Fu Huiqiao, Deng Guizhou, Tang Kaiqiang, Chen Chunlin, Liu Canghai. Research on Motion Planning of Hexapod Robot Based on DRL and Free Gait[J]. Journal of System Simulation, 2024, 36(2): 373-384.
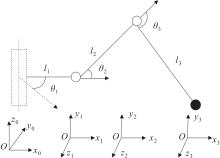
Fig. 1
Connecting rod of hexapod robot single leg structure
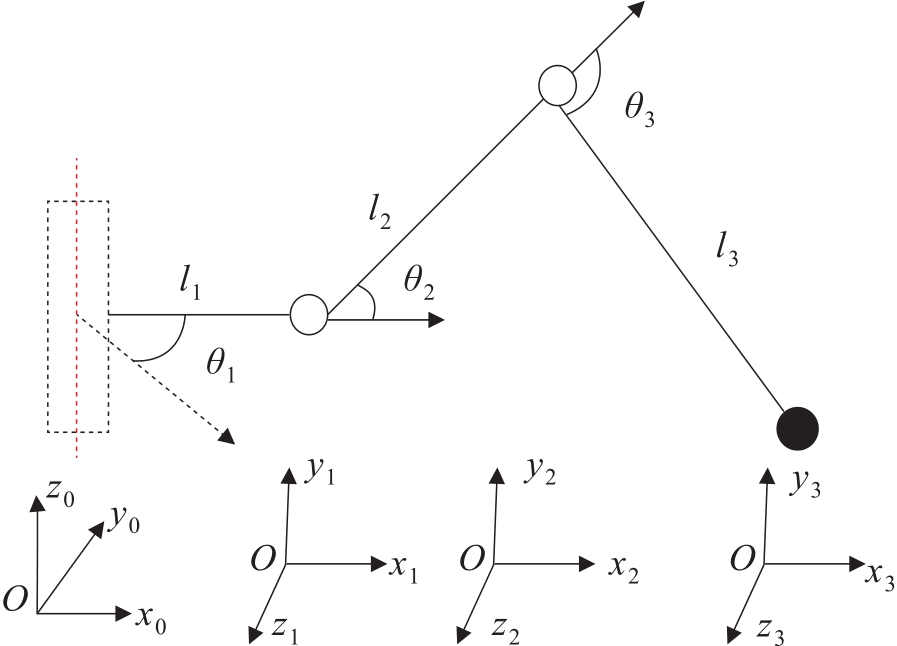
Table 1
D-H parameters of hexapod robot
| i | αi /(°) | ai | di | θi |
|---|---|---|---|---|
| 1 | 90 | l1 | 0 | θ1 |
| 2 | 0 | l2 | 0 | θ2 |
| 3 | 0 | l3 | 0 | θ3 |
Table 2
Dimension parameters and joint rotation ranges of hexapod robot
| 参数 | 基节 | 髋关节 | 膝关节 |
|---|---|---|---|
| 长度/mm | 60 | 120 | 145.8 |
| 转角范围/(°) | [-45, 45] | [0, 45] | [-135, -90] |
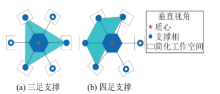
Fig. 2
Support polygon
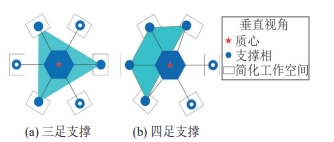
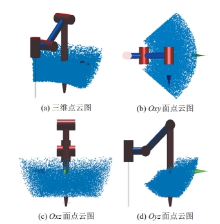
Fig. 3
Point cloud of foot workspace
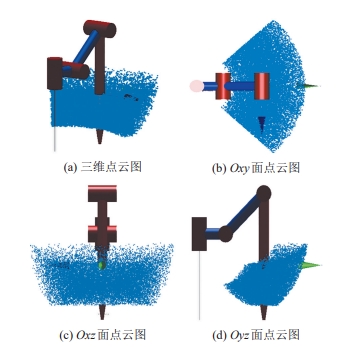
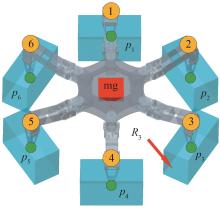
Fig. 4
Simplified workspace of hexapod robot
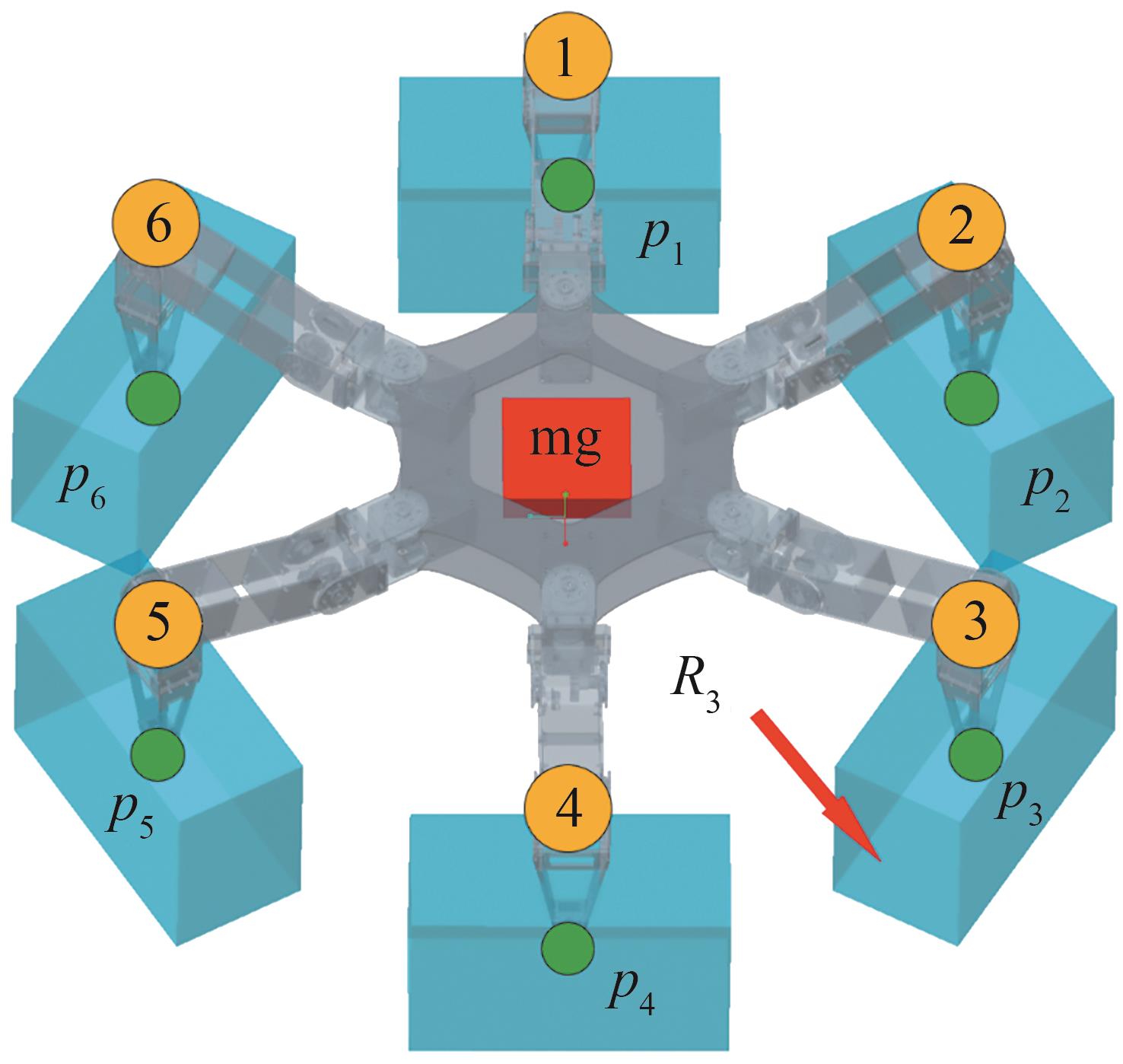
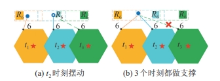
Fig. 5
Stagnation of leg 6 at three times
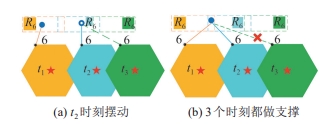
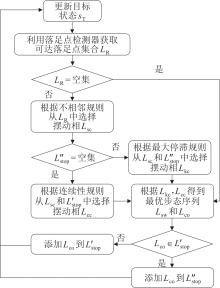
Fig. 6
Flow chart of free gait planning
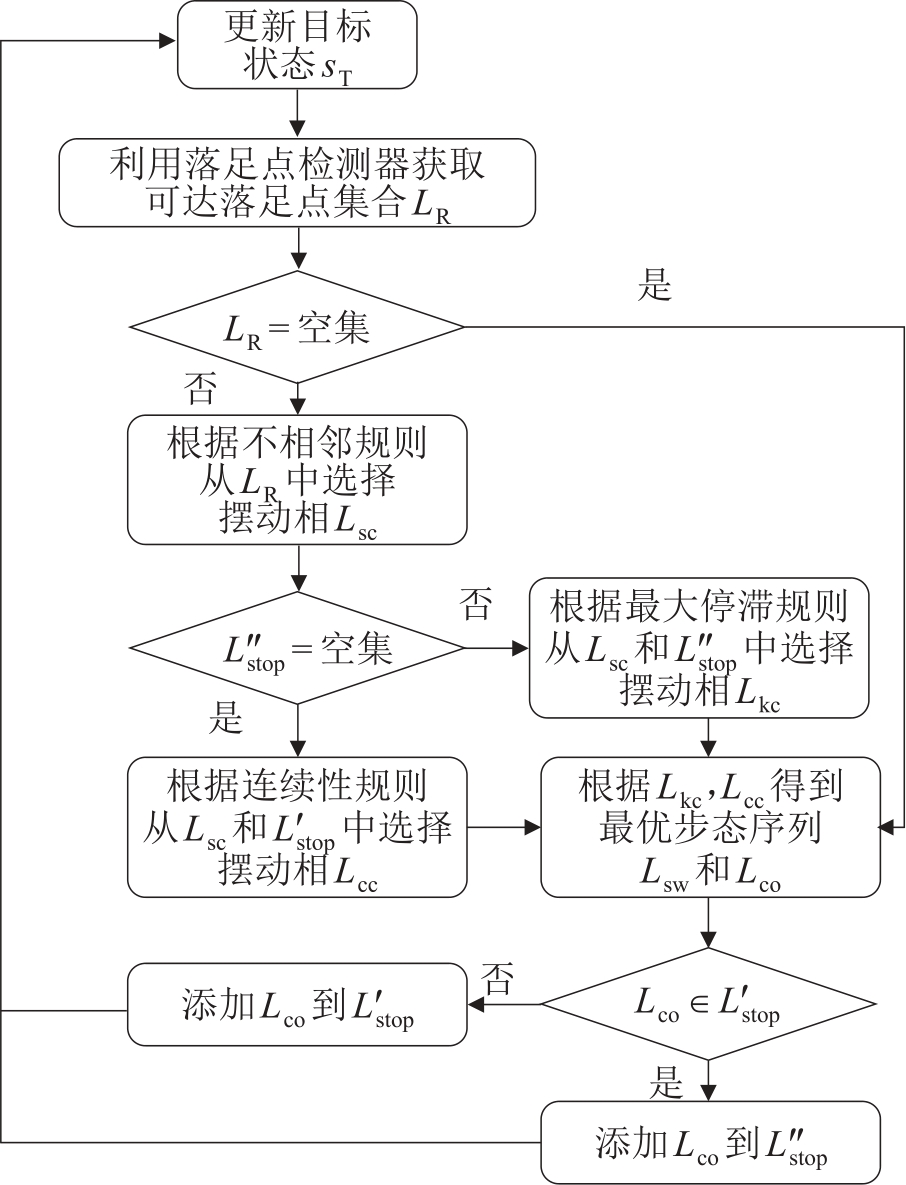
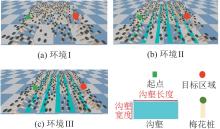
Fig. 7
Plum blossom pile environment setting
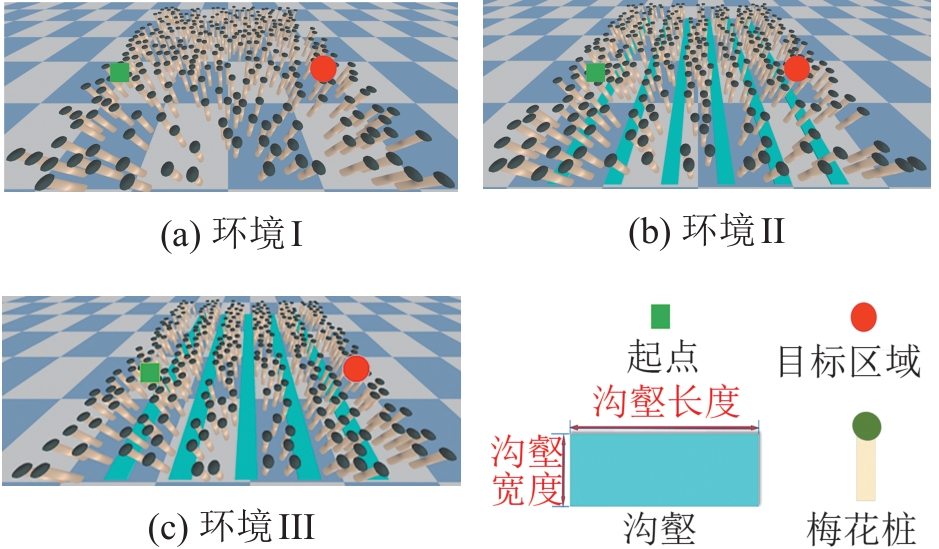
Table 3
Setting of plum blossom pile experiment environment
| 环境 | 沟壑宽度 |
|---|---|
| I | 0 |
| II | 100 |
| III | 150 |
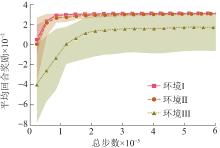
Fig. 8
Learning curve of average return under different environments
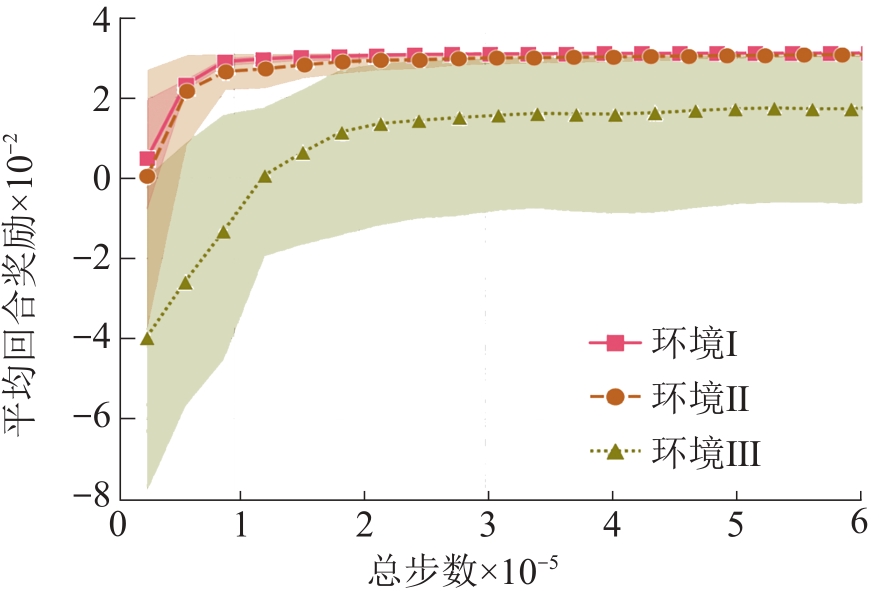
Fig. 9
Motion process of hexapod robot in simulation environment
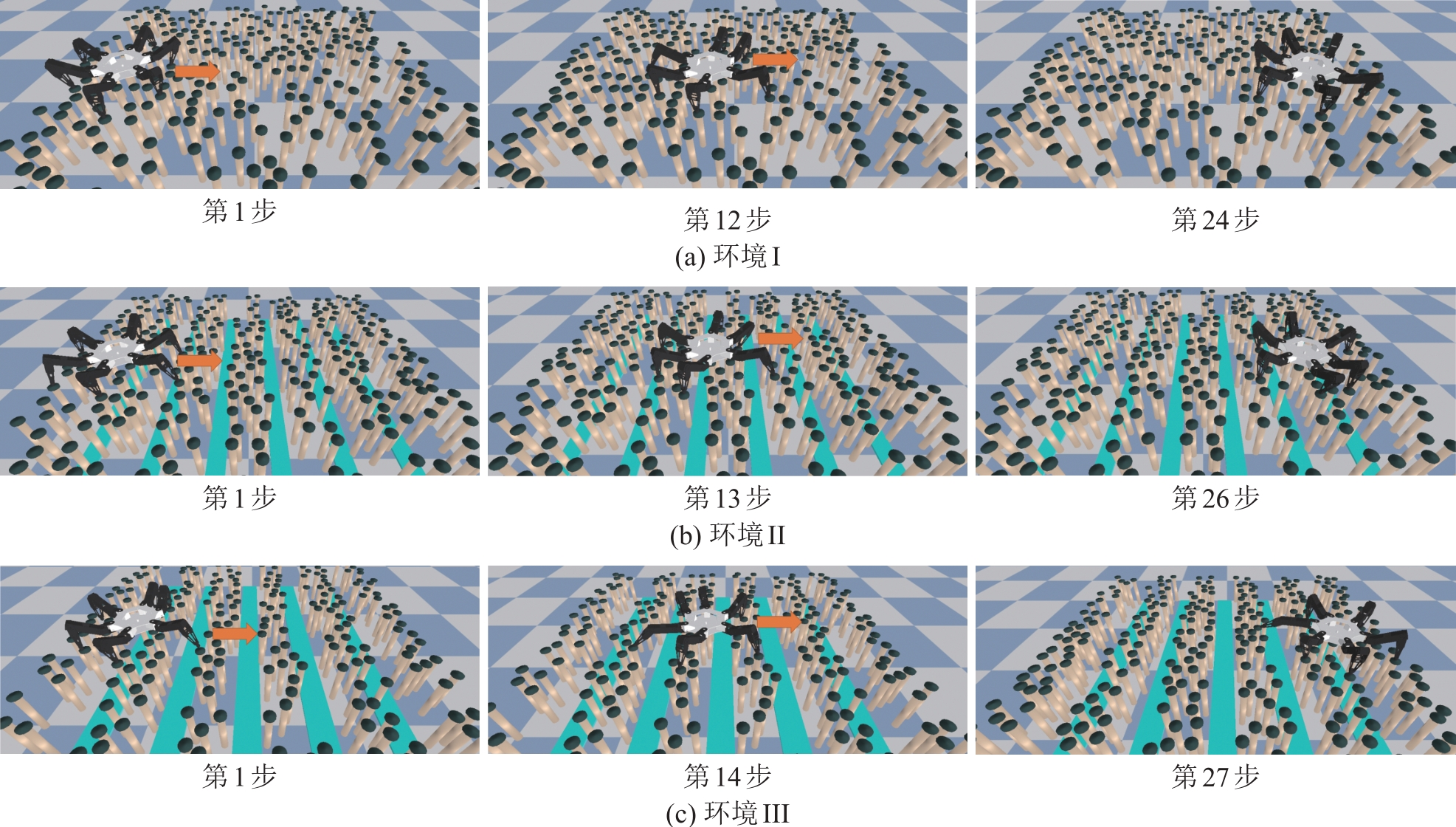
Table 4
Performance comparison in 3 environments
| 环境 | 平均回合步数 | 平均回合成功率/% |
|---|---|---|
| I | 25 | 100 |
| II | 31 | 98 |
| III | 64 | 52 |
Fig. 10
Proportion of gait patterns in different environments
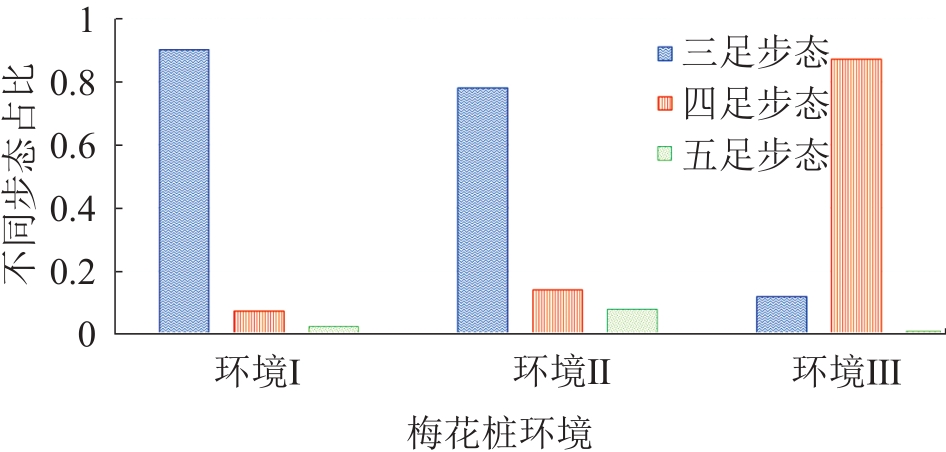
Fig. 11
Simulation process of hexapod robot in 3 trench width environments
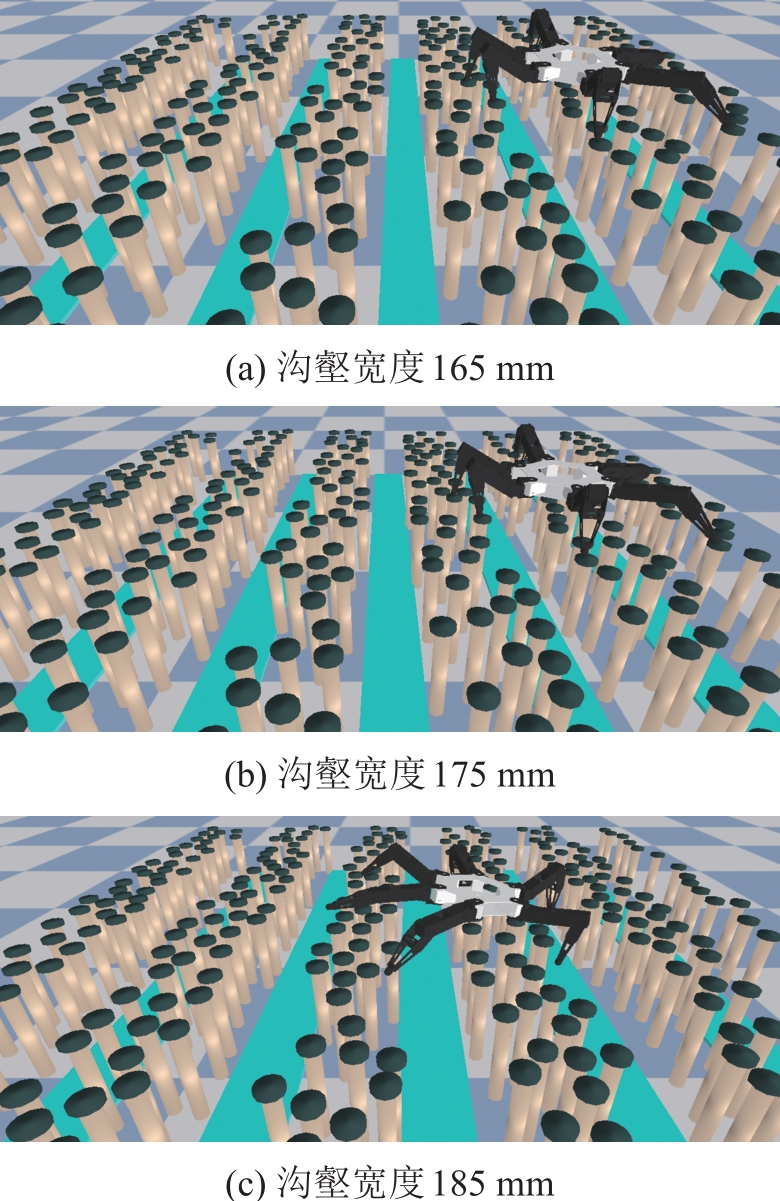
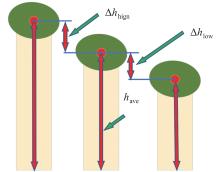
Fig. 12
Height difference of plum blossom pile
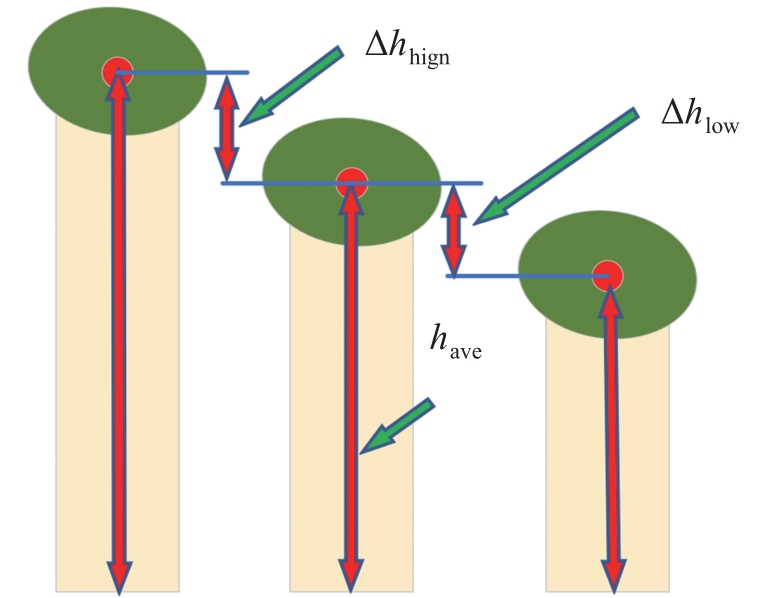

Fig. 13
Simulation process of hexapod robot in 3 height difference environments


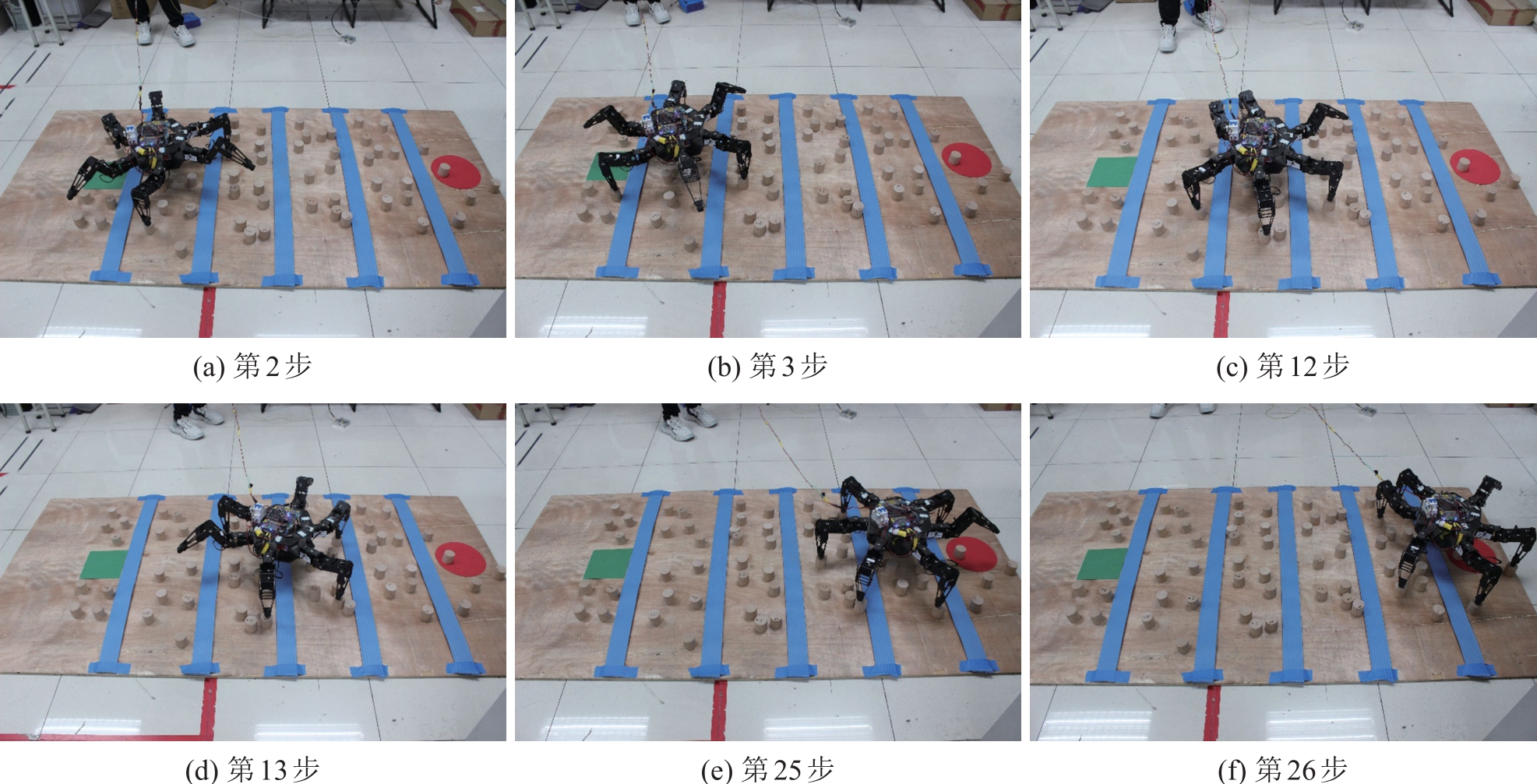
Fig.14
Motion process of hexapod robot in real environment
| 1 | Wu Jianxu, Yang Hui, Li Ruiming, et al. Design and Analysis of a Novel Octopod Platform with a Reconfigurable Trunk[J]. Mechanism and Machine Theory, 2021, 156: 104134. |
| 2 | 石琳, 罗庆生, 韩宝玲, 等. 仿生六足机器人稳定性的仿生实验研究[J]. 系统仿真学报, 2008, 20(19): 5384-5387. |
| Shi Lin, Luo Qingsheng, Han Baoling, et al. Research on Biomimetic Experiment of Stability of Hexapod Robot[J]. Journal of System Simulation, 2008, 20(19): 5384-5387. | |
| 3 | Hwangbo Jemin, Lee Joonho, Dosovitskiy Alexey, et al. Learning Agile and Dynamic Motor Skills for Legged Robots[J]. Science Robotics, 2019, 4(26): 5872. |
| 4 | Stelzer Annett, Hirschmüller Heiko, Görner Martin. Stereo-vision-based Navigation of a Six-legged Walking Robot in Unknown Rough Terrain[J]. The International Journal of Robotics Research, 2012, 31(4): 381-402. |
| 5 | 李满宏, 张明路, 张建华, 等. 六足机器人关键技术综述[J]. 机械设计, 2015, 32(10): 1-8. |
| Li Manhong, Zhang Minglu, Zhang Jianhua, et al. Review on Key Technology of the Hexapod Robot[J]. Journal of Machine Design, 2015, 32(10): 1-8. | |
| 6 | Belter Dominik, Wietrzykowski Jan, Skrzypczyński Piotr. Employing Natural Terrain Semantics in Motion Planning for a Multi-legged Robot[J]. Journal of Intelligent & Robotic Systems, 2019, 93(3): 723-743. |
| 7 | Estremera J, Cobano J A, Gonzalez de Santos P. Continuous Free-crab Gaits for Hexapod Robots on a Natural Terrain with Forbidden Zones: An Application to Humanitarian Demining[J]. Robotics and Autonomous Systems, 2010, 58(5): 700-711. |
| 8 | Estremera Joaquin, Pablo Gonzalez de Santos. Free Gaits for Quadruped Robots over Irregular Terrain[J]. The International Journal of Robotics Research, 2002, 21(2): 115-130. |
| 9 | Chen Zhijun, Liu Jimu, Gao Feng. Real-time Gait Planning Method for Six-legged Robots to Optimize the Performances of Terrain Adaptability and Walking Speed[J]. Mechanism and Machine Theory, 2022, 168: 104545. |
| 10 | Chen Xi, Wang Liquan, Ye Xiufen, et al. Prototype Development and Gait Planning of Biologically Inspired Multi-legged Crablike Robot[J]. Mechatronics, 2013, 23(4): 429-444. |
| 11 | Xu Peng, Ding Liang, Wang Zhikai, et al. Contact Sequence Planning for Hexapod Robots in Sparse Foothold Environment Based on Monte-carlo Tree[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 826-833. |
| 12 | Mustafa Suphi Erden, Leblebicioğlu Kemal. Free Gait Generation with Reinforcement Learning for a Six-legged Robot[J]. Robotics and Autonomous Systems, 2008, 56(3): 199-212. |
| 13 | Chen Zhihua, Li Jiehao, Wang Shoukun, et al. Flexible Gait Transition for Six Wheel-legged Robot with Unstructured Terrains[J]. Robotics and Autonomous Systems, 2022, 150: 103989. |
| 14 | Coelho Joana, Ribeiro Fernando, Dias Bruno, et al. Trends in the Control of Hexapod Robots: A Survey[J]. Robotics, 2021, 10(3): 100. |
| 15 | Mnih V, Kavukcuoglu K, Silver D, et al. Human-level Control Through Deep Reinforcement Learning[J]. Nature, 2015, 518(7540): 529-533. |
| 16 | 傅汇乔, 唐开强, 邓归洲, 等. 基于深度强化学习的六足机器人运动规划[J]. 智能科学与技术学报, 2020, 2(4): 361-371. |
| Fu Huiqiao, Tang Kaiqiang, Deng Guizhou, et al. Motion Planning for Hexapod Robot Using Deep Reinforcement Learning[J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(4): 361-371. | |
| 17 | 董星宇, 唐开强, 傅汇乔, 等. 基于强化学习的六足机器人动态避障研究[J]. 传感器与微系统, 2022, 41(1): 19-23. |
| Dong Xingyu, Tang Kaiqiang, Fu Huiqiao, et al. Study on Dynamic Obstacle Avoidance for Hexapod Robot Based on Reinforcement Learning[J]. Transducer and Microsystem Technologies, 2022, 41(1): 19-23. | |
| 18 | Fu Huiqiao, Tang Kaiqiang, Li Peng, et al. Deep Reinforcement Learning for Multi-contact Motion Planning of Hexapod Robots[C]//Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence. California: IJCAI, 2021: 2381-2388. |
| 19 | Tsounis Vassilios, Alge Mitja, Lee Joonho, et al. DeepGait: Planning and Control of Quadrupedal Gaits Using Deep Reinforcement Learning[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3699-3706. |
| 20 | Winkler A W. Optimization-based Motion Planning for Legged Robots[D]. Zurich: ETH Zurich, 2018. |
| 21 | Haarnoja T, Zhou A, Abbeel P, et al. Soft Actor-critic: Off-policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor[C]//Proceedings of the 35th International Conference on Machine Learning. Chia Laguna Resort, Sardinia, Italy: PMLR, 2018: 1861-1870. |
| 22 | In Kim Jae, Hong Mineui, Lee Kyungjae, et al. Learning to Walk a Tripod Mobile Robot Using Nonlinear Soft Vibration Actuators with Entropy Adaptive Reinforcement Learning[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2317-2324. |
| 23 | 孙辉辉, 胡春鹤, 张军国. 移动机器人运动规划中的深度强化学习方法[J]. 控制与决策, 2021, 36(6): 1281-1292. |
| Sun Huihui, Hu Chunhe, Zhang Junguo. Deep Reinforcement Learning for Motion Planning of Mobile Robots[J]. Control and Decision, 2021, 36(6): 1281-1292. |
| [1] | Wu Shuxia, Zhang Junjie, Chen Delong, Chen Zheyi. Resource-efficient Continuous Learning Framework for Edge Real-time Video Analytics [J]. Journal of System Simulation, 2026, 38(2): 294-306. |
| [2] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [3] | Liu Quan, Wang Yu, Liu Linyue, Chen Hao, Huang Jian. Knowledge Closed-loop Driving-based Intelligent Game Confrontation Simulation [J]. Journal of System Simulation, 2026, 38(2): 416-432. |
| [4] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [5] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| [6] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [7] | Zhang Bin, Lei Yonglin, Li Qun, Gao Yuan, Chen Yong, Zhu Jiajun, Bao Chenlong. Reinforcement Learning Modeling of Missile Penetration Decision Based on Combat Simulation [J]. Journal of System Simulation, 2025, 37(3): 763-774. |
| [8] | Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(3): 595-606. |
| [9] | Fei Shuaidi, Cai Changlong, Liu Fei, Chen Minghui, Liu Xiaoming. Research on the Target Allocation Method for Air Defense and Anti-missile Defense of Naval Ships [J]. Journal of System Simulation, 2025, 37(2): 508-516. |
| [10] | Huang Sijin, Wen Jia, Chen Zheyi. Intelligent Service Migration towards MEC-based IoV Systems [J]. Journal of System Simulation, 2025, 37(2): 379-391. |
| [11] | Li Chao, Li Jiabao, Ding Caichang, Ye Zhiwei, Zuo Fangwei. Edge Surveillance Task Offloading and Resource Allocation Algorithm Based on DRL [J]. Journal of System Simulation, 2024, 36(9): 2113-2126. |
| [12] | Wang Hongjun, Lin Junqiang, Zou Xiangjun, Zhang Po, Zhou Mingxuan, Zou Weirui, Tang Yunchao, Luo Lufeng. Construction of a Virtual Interactive System for Orchards Based on Digital Twin [J]. Journal of System Simulation, 2024, 36(6): 1493-1508. |
| [13] | Zhu Zilu, Liu Yongkui, Zhang Lin, Wang Lihui, Lin Tingyu. Simulation of Robotic Peg-in-hole Assembly Strategy Based on DRL [J]. Journal of System Simulation, 2024, 36(6): 1414-1424. |
| [14] | Wang Yuan, Xu Lin, Gong Xiaoze, Zhang Yongliang, Wang Yongli. Gradient-based Deep Reinforcement Learning Interpretation Methods [J]. Journal of System Simulation, 2024, 36(5): 1130-1140. |
| [15] | Pan Hainan, Chen Bailiang, Huang Kaihong, Ren Junkai, Cheng Chuang, Lu Huimin, Zhang Hui. Flipper Control Method for Tracked Robot Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2024, 36(2): 405-414. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
