

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (9): 2397-2408.doi: 10.16182/j.issn1004731x.joss.24-0453
• Papers • Previous Articles Next Articles
Yu Yiran1,2, Lai Huicheng1,2, Gao Guxue1,2, Zhang Guo1,2, Peng Wangyinan1,2, Yang Longfei1,2, Huang Junhao1,2
Received:2024-04-26
Revised:2024-06-04
Online:2025-09-18
Published:2025-09-22
Contact:
Lai Huicheng
CLC Number:
Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm[J]. Journal of System Simulation, 2025, 37(9): 2397-2408.
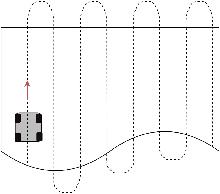
Fig. 1
Site constraints
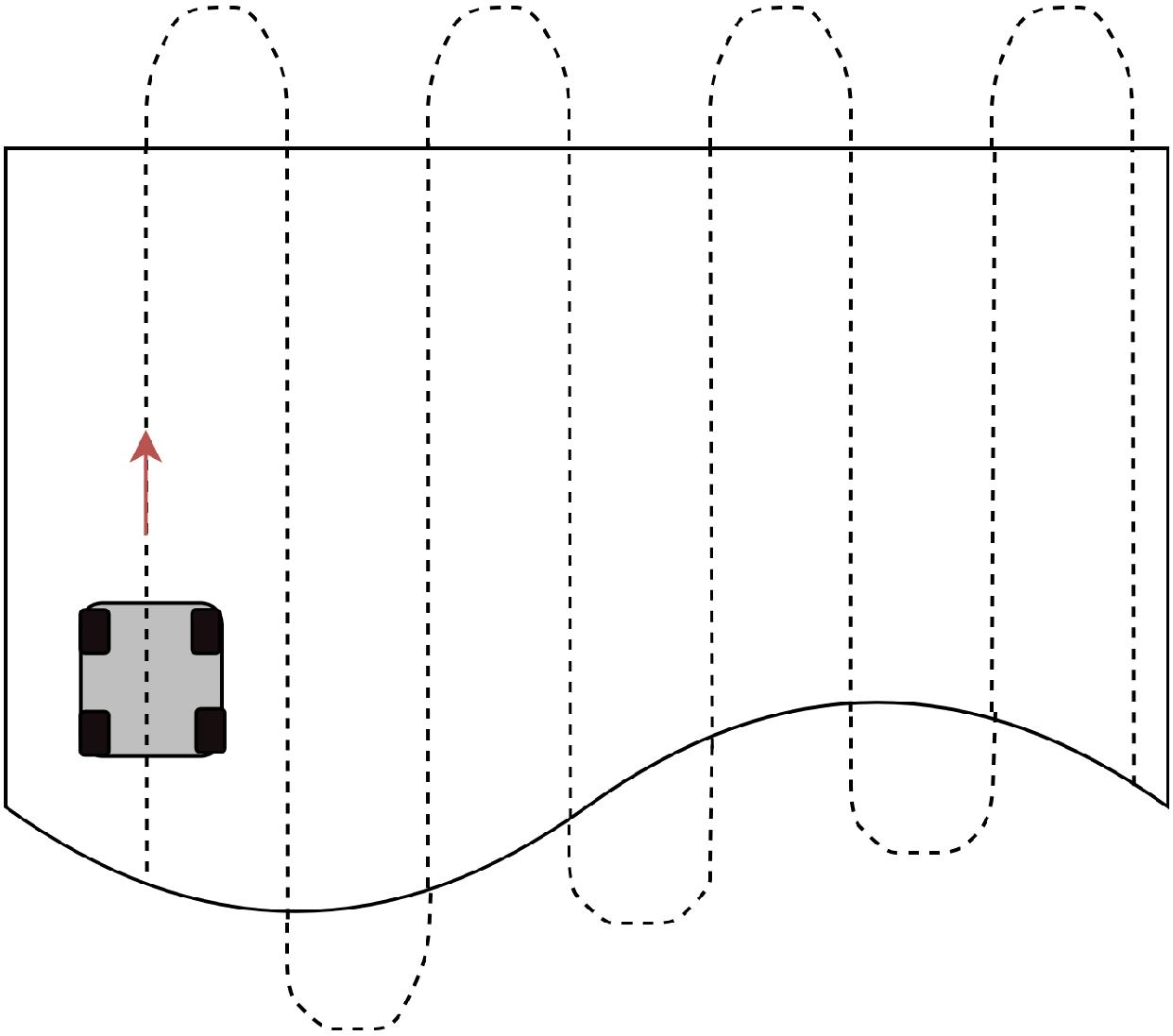

Fig. 2
Population initialization
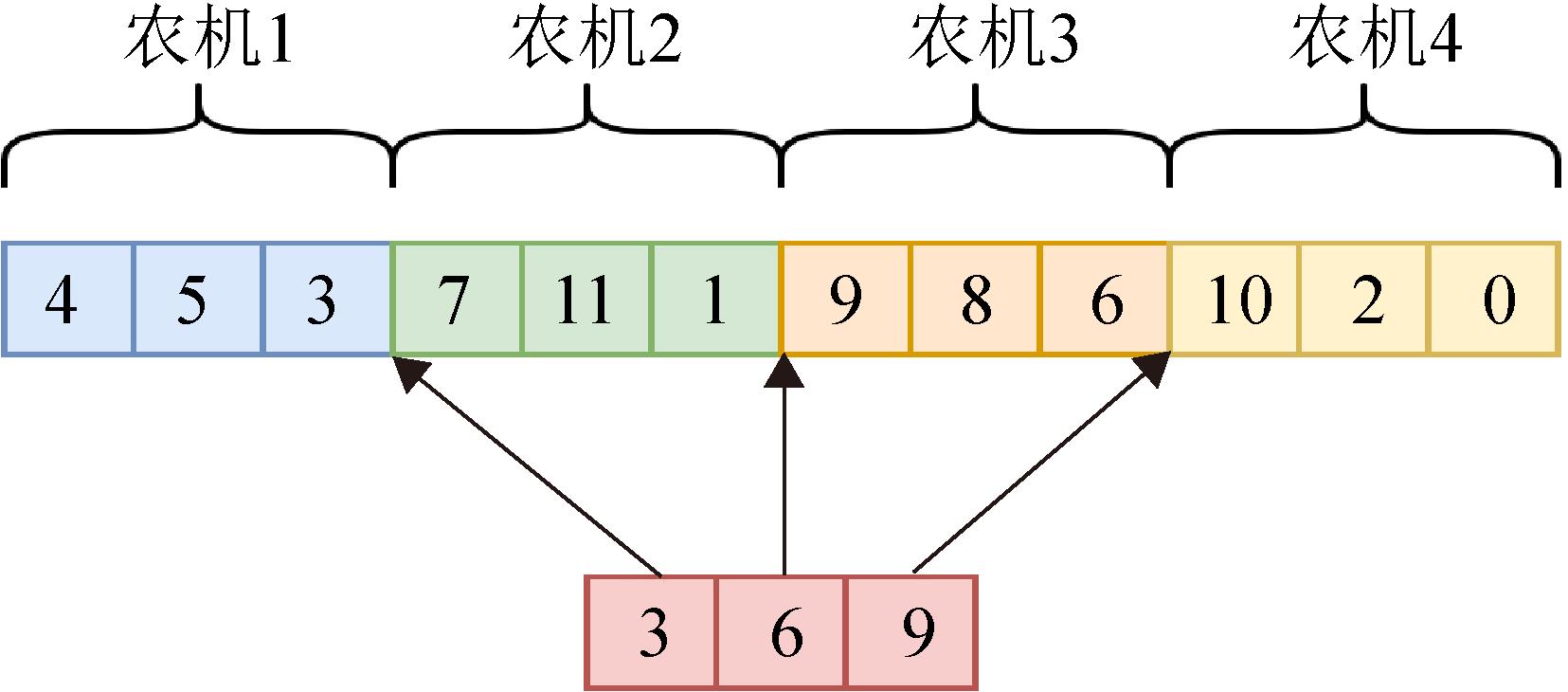
Fig. 3
Genetic recombination operator

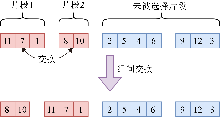
Fig. 4
Inter-group exchange operator
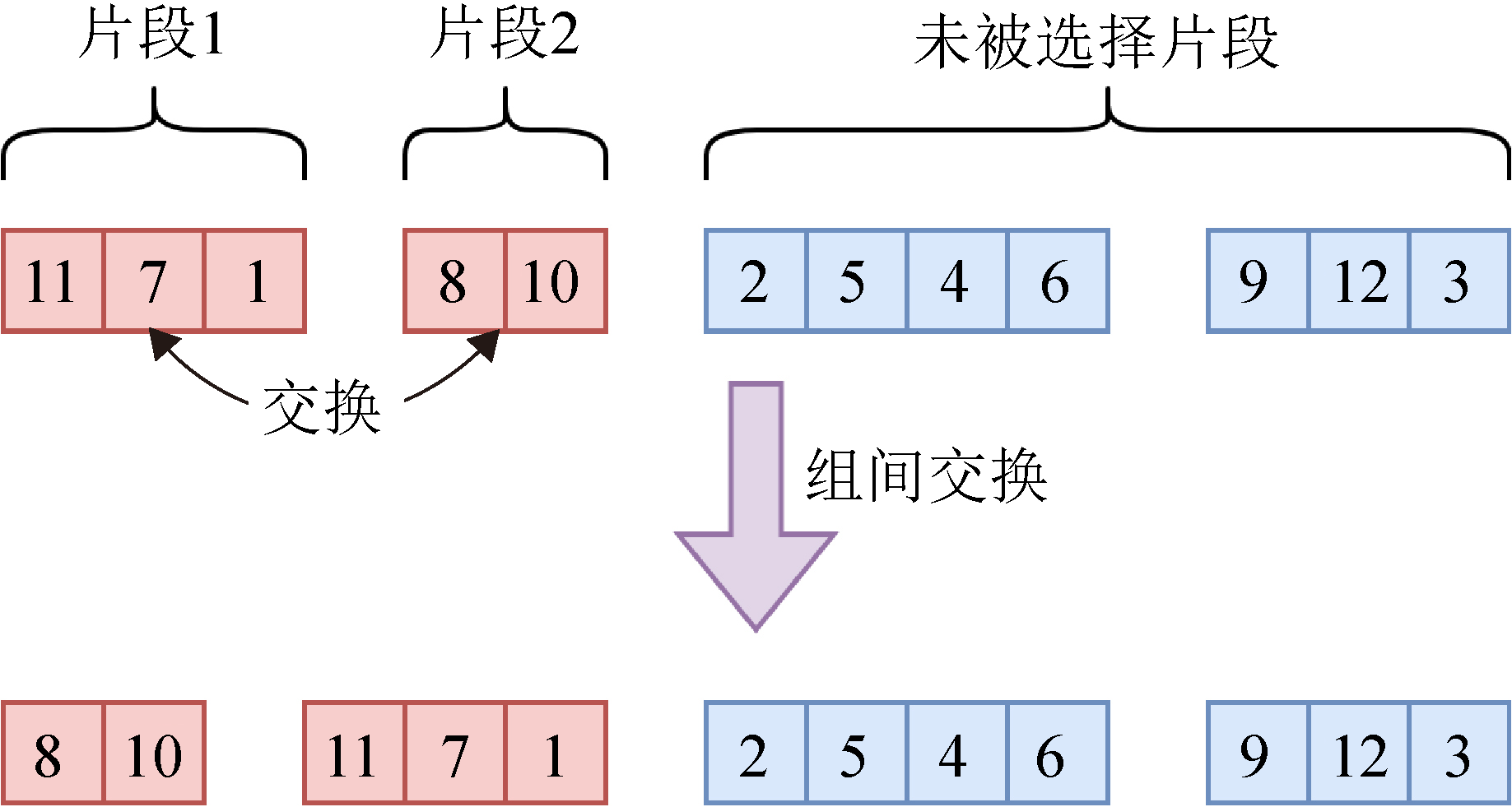
Fig. 5
Discontinuous point mutation operator
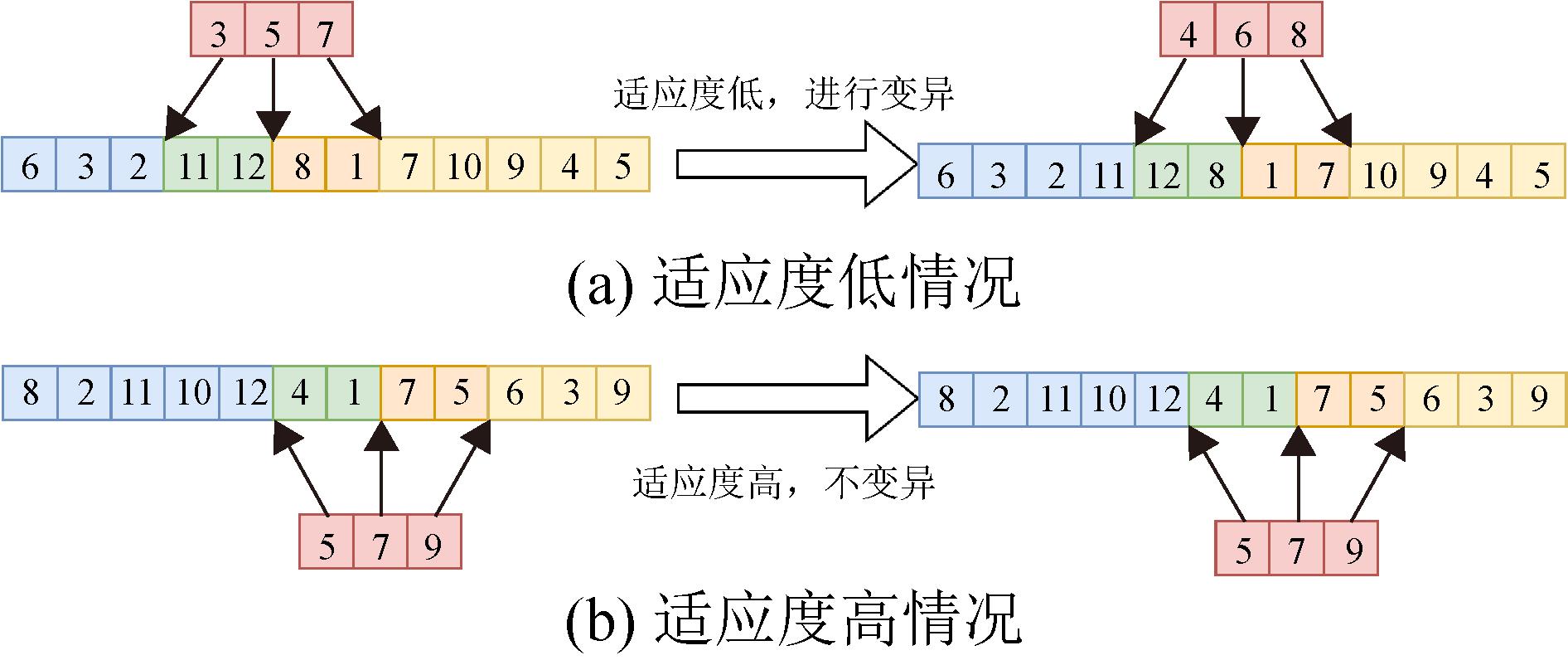
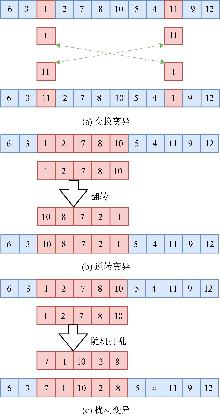
Fig. 6
Mixed mutation operator
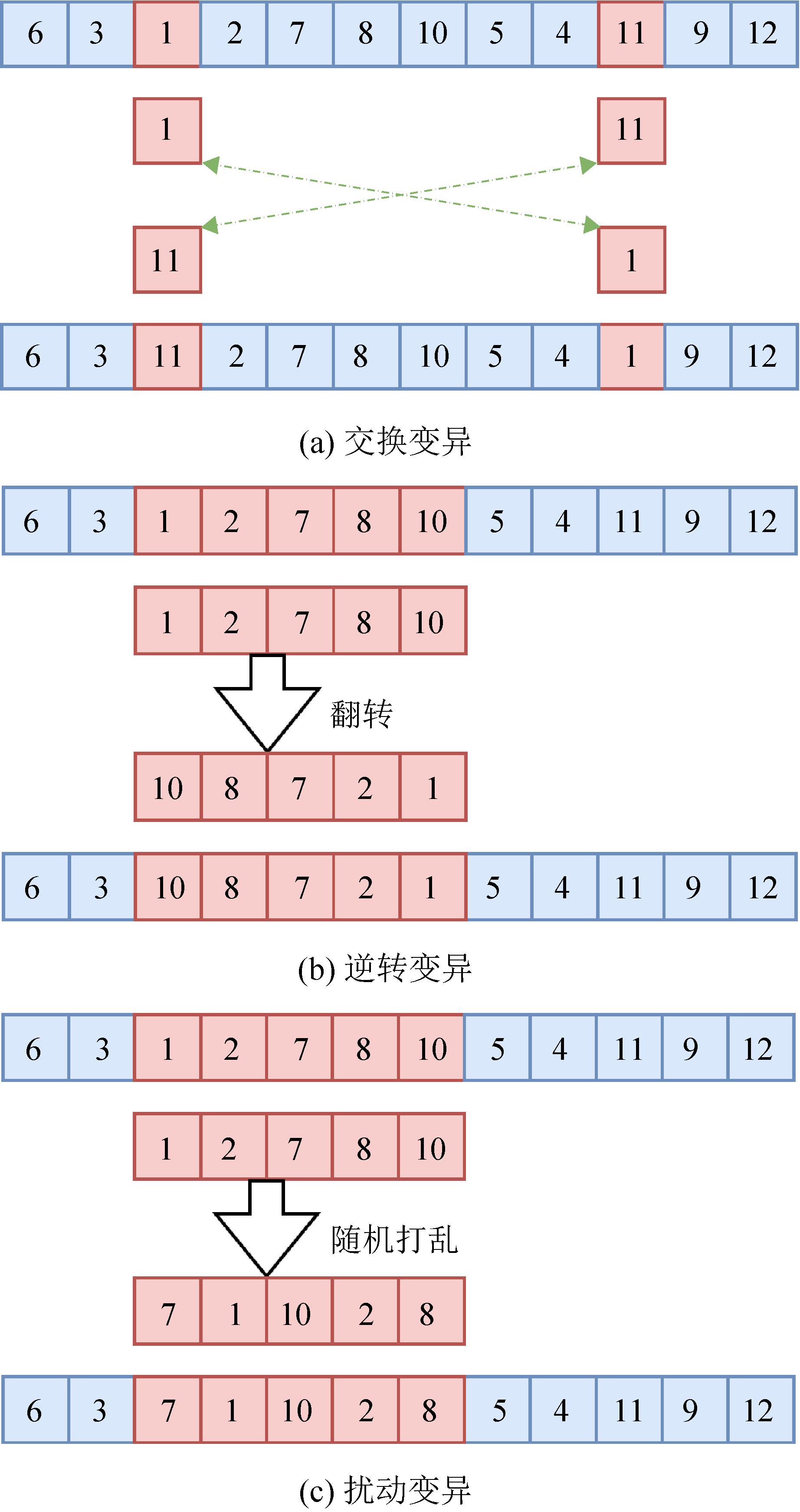

Fig. 7
Task assignment flowchart
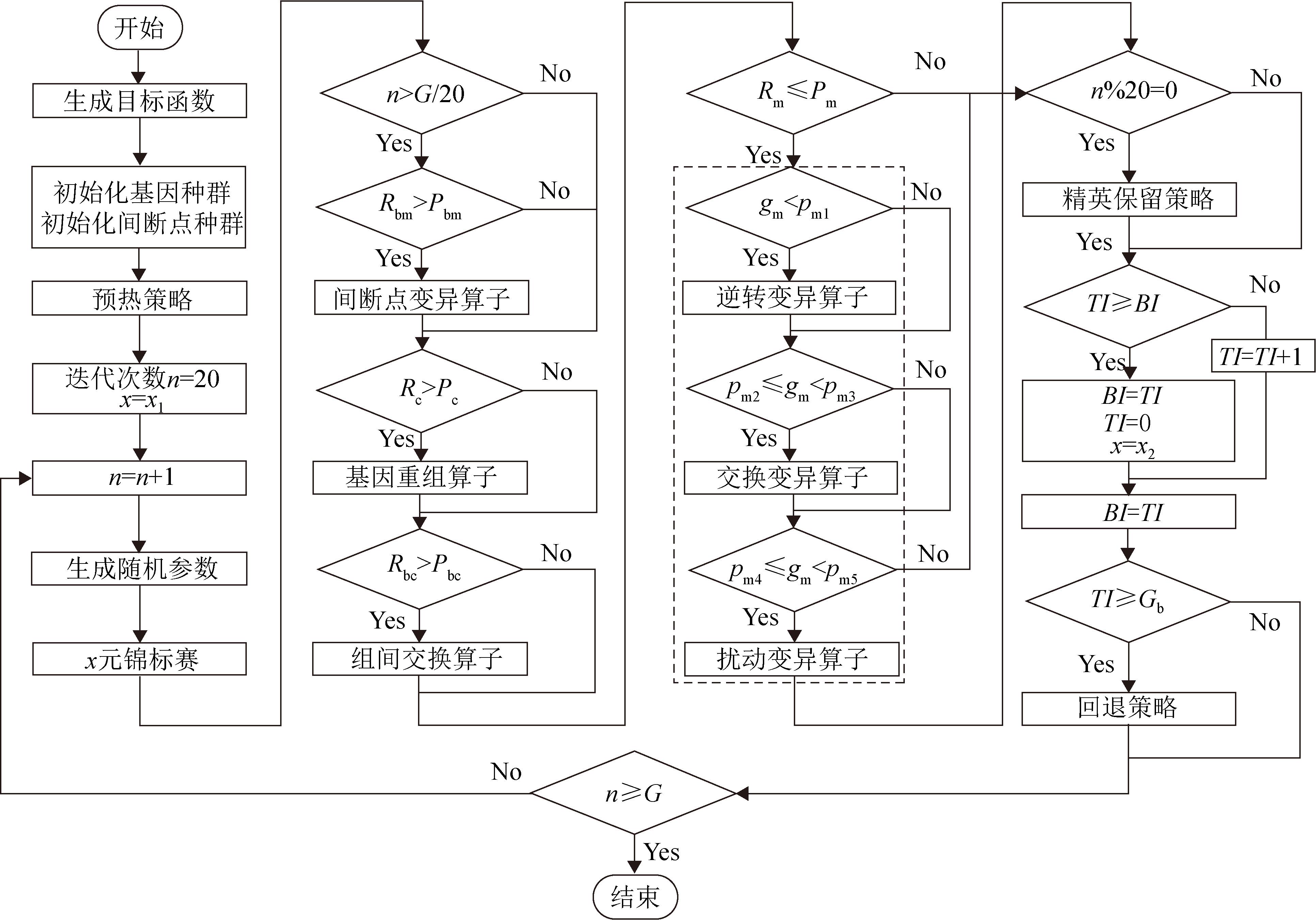

Fig. 8
Map of experimental farm No. 1
Table 1
Agricultural machinery performance parameters
| 参数 | 量值 |
|---|---|
| 作业宽幅d/m | 2.4 |
| 农机轴距L/m | 3.5 |
| 农机作业平均速度vw/(km/h) | 3.5 |
| 农机行驶平均速度vr/(km/h) | 15 |
| 农机转向平均速度vturn/(km/h) | 2.5 |
| 最大转向角θmax /rad | 0.6 |
Table 2
Farm specific parameters
| 农田序号 | 长度/m | 宽度/m |
|---|---|---|
| 1 | 173 | 100 |
| 2 | 133 | 92 |
| 3 | 139 | 52 |
| 4 | 111 | 42 |
| 5 | 73 | 58 |
| 6 | 97 | 90 |
| 7 | 120 | 66 |
| 8 | 103 | 127 |
| 9 | 115 | 98 |
| 10 | 74 | 44 |
| 11 | 225 | 94 |
| 12 | 49 | 134 |
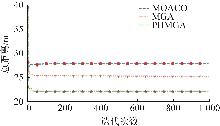
Fig. 9
Algorithm comparison results
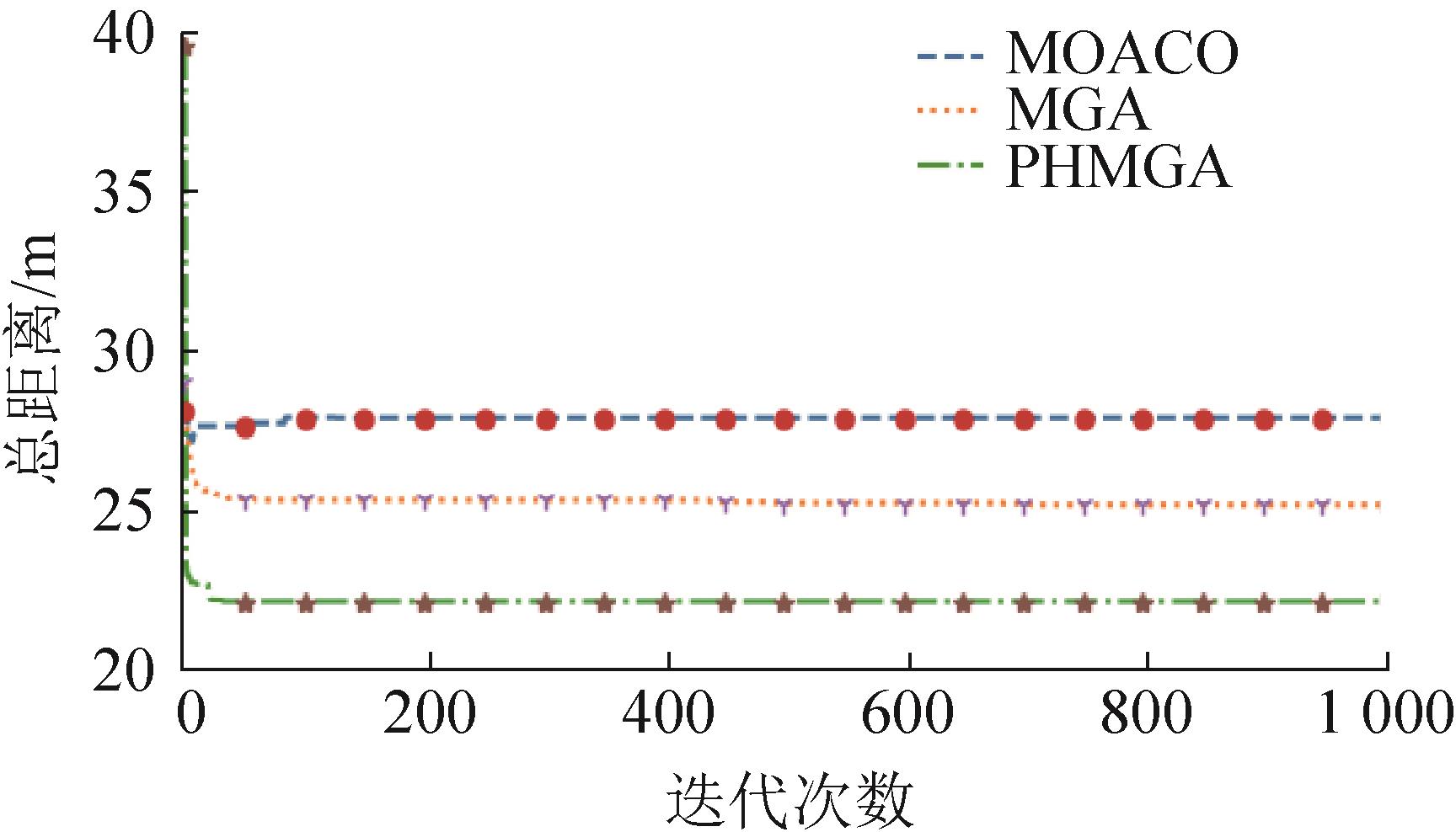
Table 3
Experimental results with different weights
| 权重 | 任务分配结果 | R | G | ||||
|---|---|---|---|---|---|---|---|
| 农机1 | 农机2 | 农机3 | 农机4 | ||||
| α=1,β=0,γ=0 | 0→7→8→0 | 0→5→9→0 | 0→2→4→6→ 10→11→12→0 | 0→1→3→0 | 22.08 | 384.291 | 134.180 |
| α=0,β=1,γ=0 | 0→12→3→2→0 | 0→11→5→0 | 0→10→4→ 7→9→0 | 0→8→6→1→0 | 37.255 | 0.011 | 8.514 |
| α=0,β=0,γ=1 | 0→7→10→3→0 | 0→2→5→9→0 | 0→1→4→8→0 | 0→11→6→12→0 | 34.219 | 32.813 | 0.003 |
| α=0.6,β=0.2,γ=0.2 | 0→12→2→3→0 | 0→1→4→8→0 | 0→5→6→ 10→9→0 | 0→7→11→0 | 30.977 | 1.911 | 0.065 |
| α=0.2,β=0.6,γ=0.2 | 0→7→5→3→0 | 0→6→10→ 9→8→0 | 0→11→4→0 | 0→12→2→1→0 | 30.253 | 0.459 | 1.703 |
| α=0.2,β=0.2,γ=0.6 | 0→5→11→0 | 0→9→10→ 6→4→0 | 0→1→8→7→0 | 0→12→2→3→0 | 29.403 | 0.015 | 4.786 |
| α=0.33,β=0.33,γ=0.33 | 0→5→6→ 10→9→0 | 0→3→2→12→0 | 0→8→4→1→0 | 0→7→11→0 | 30.977 | 1.911 | 0.065 |

Fig. 10
Comparison of three algorithms on different task plot quantities
Fig. 11
Task sequence representation
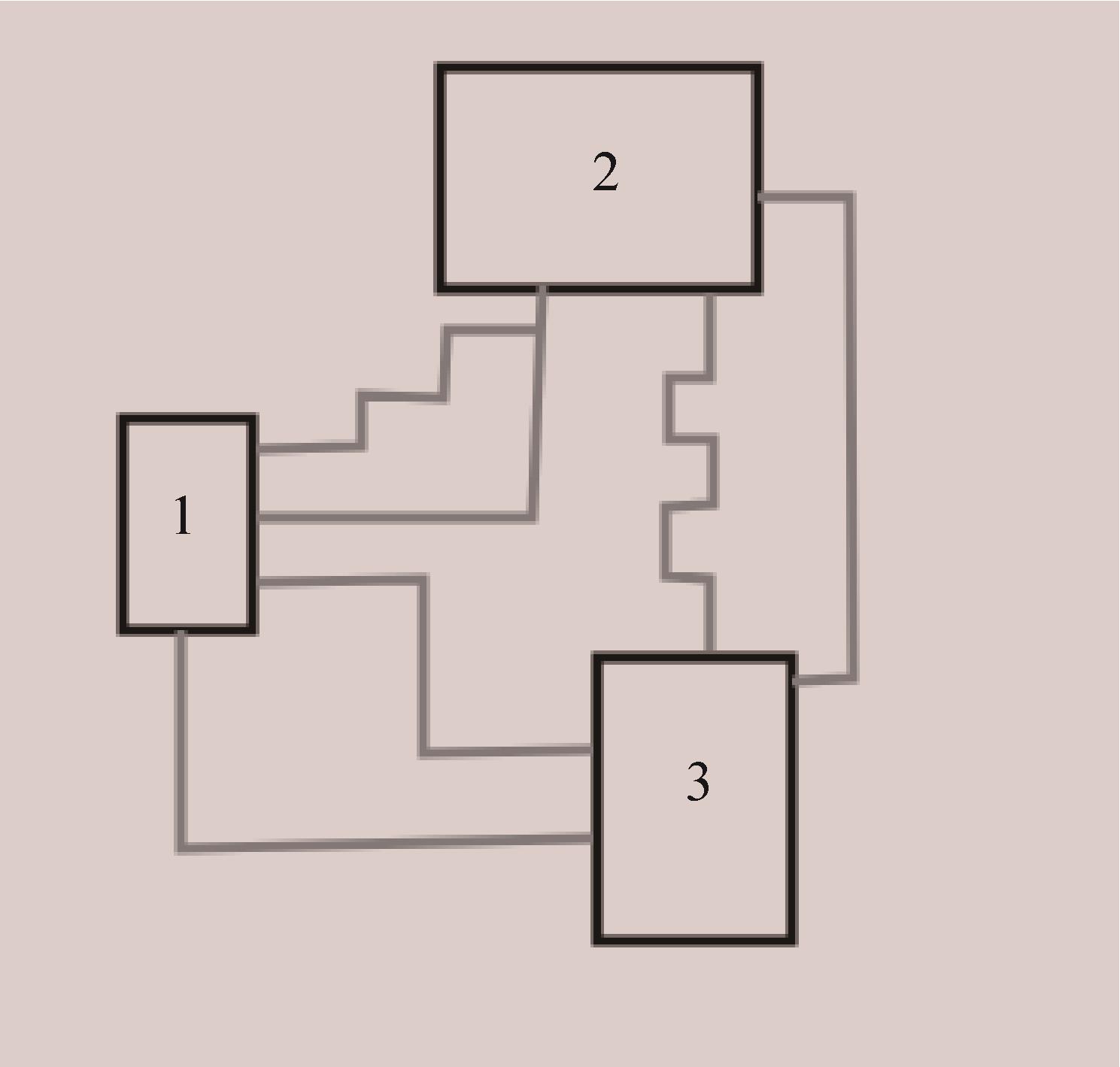
Table 4
Comparison of A* and tA* path planning performance in a farmland scenario
| 子任务 | 性能 | A* | tA* |
|---|---|---|---|
| 1→2 | 选择的路径 消耗的时间/s | ① 88.68 | ② 48.12 |
| 2→3 | 选择的路径 消耗的时间/s | ① 149.96 | ② 91.19 |
| 3→1 | 选择的路径 消耗的时间/s | ① 52.79 | ① 52.79 |
Table 5
Comparison of multi-machine cooperative task planning
| 算法 | 农机编号 | 作业距离/km | 作业时间/h | 完成时间/h | 等待时间/h |
|---|---|---|---|---|---|
| MGA+A* | 农机1 农机2 农机3 农机4 | 10.094 22.452 14.236 19.410 | 1.908 3.008 2.105 2.954 | 3.008 | 1.100 |
| MGA+tA* | 农机1 农机2 农机3 农机4 | 10.230 22.452 14.236 19.486 | 1.901 3.008 2.105 2.951 | 3.008 | 1.107 |
| MOACO+A* | 农机1 农机2 农机3 农机4 | 14.176 17.787 17.201 17.898 | 2.395 2.431 2.175 3.018 | 3.018 | 0.843 |
| MOACO+tA* | 农机1 农机2 农机3 农机4 | 14.276 17.787 17.201 17.898 | 2.391 2.431 2.175 3.018 | 3.018 | 0.843 |
| PHMGA+A* | 农机1 农机2 农机3 农机4 | 16.270 16.906 21.700 18.544 | 2.534 2.498 2.856 2.595 | 2.856 | 0.358 |
| PHMGA+tA* | 农机1 农机2 农机3 农机4 | 16.270 17.026 21.700 18.544 | 2.534 2.493 2.856 2.595 | 2.856 | 0.363 |
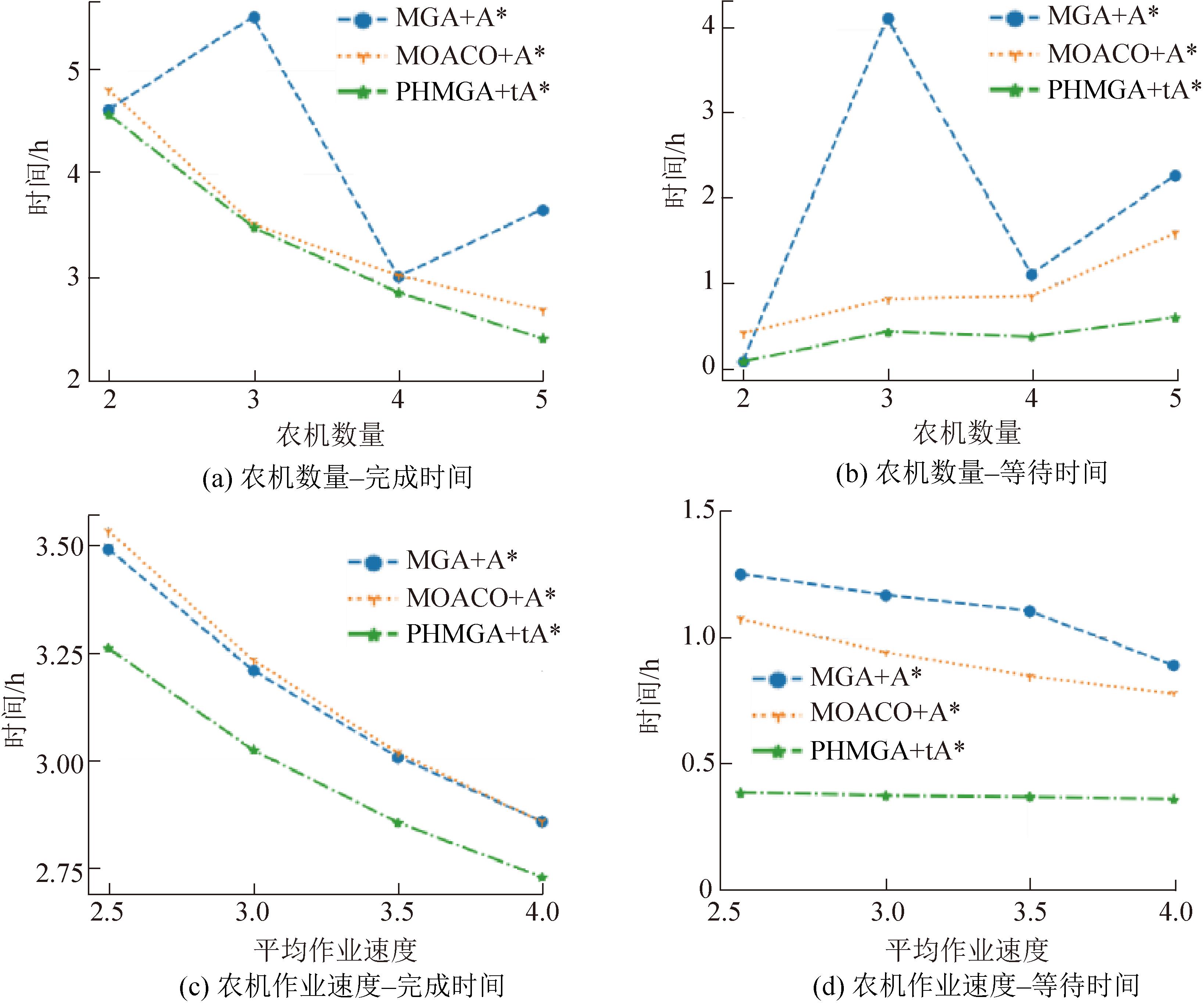
Fig. 12
Performance after major parameter changes
| [1] | 国家统计局. 中国统计年鉴——2023[EB/OL]. [2024-04-15]. . |
| [2] | 习近平. 加快建设农业强国推进农业农村现代化[J]. 求是, 2023(6): 4-17. |
| [3] | 刘成良, 贡亮, 苑进, 等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报, 2022, 53(7): 1-22, 55. |
| Liu Chengliang, Gong Liang, Yuan Jin, et al. Current Status and Development Trends of Agricultural Robots[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(7): 1-22, 55. | |
| [4] | 韩冷, 何雄奎, 王昌陵, 等. 智慧果园构建关键技术装备及展望[J]. 智慧农业(中英文), 2022, 4(3): 1-11. |
| Han Leng, He Xiongkui, Wang Changling, et al. Key Technologies and Equipment for Smart Orchard Construction and Prospects[J]. Smart Agriculture, 2022, 4(3): 1-11. | |
| [5] | 张振国, 毛建旭, 谭浩然, 等. 重大装备制造多机器人任务分配与运动规划技术研究综述[J]. 自动化学报, 2024, 50(1): 21-41. |
| Zhang Zhenguo, Mao Jianxu, Tan Haoran, et al. A Review of Task Allocation and Motion Planning for Multi-robot in Major Equipment Manufacturing[J]. Acta Automatica Sinica, 2024, 50(1): 21-41. | |
| [6] | 陈宝童, 王丽清, 蒋晓敏, 等. 群智协同任务分配研究综述[J]. 计算机工程与应用, 2021, 57(20): 1-12. |
| Chen Baotong, Wang Liqing, Jiang Xiaomin, et al. Survey of Task Assignment for Crowd-based Cooperative Computing[J]. Computer Engineering and Applications, 2021, 57(20): 1-12. | |
| [7] | Tang Jun, Liu Gang, Pan Qingtao. A Review on Representative Swarm Intelligence Algorithms for Solving Optimization Problems: Applications and Trends[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(10): 1627-1643. |
| [8] | Chakraa Hamza, Guérin François, Leclercq Edouard, et al. Optimization Techniques for Multi-robot Task Allocation Problems: Review on the State-of-the-art[J]. Robotics and Autonomous Systems, 2023, 168: 104492. |
| [9] | 崔炜, 朱发证. 机器人导航的路径规划算法研究综述[J]. 计算机工程与应用, 2023, 59(19): 10-20. |
| Cui Wei, Zhu Fazheng. Review of Path Planning Algorithms for Robot Navigation[J]. Computer Engineering and Applications, 2023, 59(19): 10-20. | |
| [10] | Yao Linhui, Sun Zhongyi. Research Progress of Robot Path Planning Algorithm[J]. Current Journal of Applied Science and Technology, 2023, 42(23): 27-41. |
| [11] | Chakraborty Suprava, Elangovan Devaraj, Padma Lakshmi Govindarajan, et al. A Comprehensive Review of Path Planning for Agricultural Ground Robots[J]. Sustainability, 2022, 14(15): 9156. |
| [12] | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26. |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| [13] | Hu Kewei, Chen Zheng, Kang Hanwen, et al. 3D Vision Technologies for a Self-developed Structural External Crack Damage Recognition Robot[J]. Automation in Construction, 2024, 159: 105262. |
| [14] | 余翔, 姜陈, 段思睿, 等. 改进A*算法和人工势场法的路径规划[J]. 系统仿真学报, 2024, 36(3): 782-794. |
| Yu Xiang, Jiang Chen, Duan Sirui, et al. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method[J]. Journal of System Simulation, 2024, 36(3): 782-794. | |
| [15] | Dam Tuan, Chalvatzaki Georgia, Peters Jan, et al. Monte-Carlo Robot Path Planning[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 11213-11220. |
| [16] | 余翔, 邓千锐, 段思睿, 等. 一种多无人机协同优先覆盖搜索算法[J]. 系统仿真学报, 2024, 36(4): 991-1000. |
| Yu Xiang, Deng Qianrui, Duan Sirui, et al. A Multi-UAV Collaborative Priority Coverage Search Algorithm[J]. Journal of System Simulation, 2024, 36(4): 991-1000. | |
| [17] | 王伟权, 丁鼎, 曹淑艳. 混合变邻域搜索算法求解大规模电动车辆路径优化问题[J]. 系统仿真学报, 2022, 34(4): 910-919. |
| Wang Weiquan, Ding Ding, Cao Shuyan. Hybrid Variable Neighborhood Search algorithm for the Multi-trip and Heterogeneous-fleet Electric Vehicle Routing Problem[J]. Journal of System Simulation, 2022, 34(4): 910-919. | |
| [18] | Zhang Yajia, Sun Hongyi, Zhou Jinyun, et al. Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Piscataway: IEEE, 2020: 978-984. |
| [19] | 张莉, 张惠珍, 刘冬, 等. 考虑紧迫度的应急物资调度及粒子群算法求解[J]. 系统仿真学报, 2022, 34(9): 1988-1998. |
| Zhang Li, Zhang Huizhen, Liu Dong, et al. Particle Swarm Algorithm for Solving Emergency Material Dispatch Considering Urgency[J]. Journal of System Simulation, 2022, 34(9): 1988-1998. | |
| [20] | Evans J T IV, Pitla S K, Luck J D, et al. Row Crop Grain Harvester Path Optimization in Headland Patterns[J]. Computers and Electronics in Agriculture, 2020, 171: 105295. |
| [21] | Zhao Xin, Wang Ke, Wu Sixian, et al. An Obstacle Avoidance Path Planner for an Autonomous Tractor Using the Minimum Snap Algorithm[J]. Computers and Electronics in Agriculture, 2023, 207: 107738. |
| [22] | Worasan Kongkidakhon, Sethanan Kanchana, Pitakaso Rapeepan, et al. Hybrid Particle Swarm Optimization and Neighborhood Strategy Search for Scheduling Machines and Equipment and Routing of Tractors in Sugarcane Field Preparation[J]. Computers and Electronics in Agriculture, 2020, 178: 105733. |
| [23] | Wang Ning, Yang Xi, Wang Tianhai, et al. Collaborative Path Planning and Task Allocation for Multiple Agricultural Machines[J]. Computers and Electronics in Agriculture, 2023, 213: 108218. |
| [24] | Singh Alok, Anurag Singh Baghel. A New Grouping Genetic Algorithm Approach to the Multiple Traveling Salesperson Problem[J]. Soft Computing, 2009, 13(1): 95-101. |
| [25] | Alaya Ines, Solnon Christine, Ghedira Khaled. Ant Colony Optimization for Multi-objective Optimization Problems[C]//19th IEEE International Conference on Tools with Artificial Intelligence(ICTAI 2007). Piscataway: IEEE, 2007: 450-457. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [8] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [9] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [10] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [11] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [12] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [13] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [14] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [15] | He Zhigang, Li Dayan, Wang Niya, Mao Jianlin, Wang Ning. A Multi-robot Collaborative Path Planning Algorithm with Chain Working Mode [J]. Journal of System Simulation, 2025, 37(4): 953-967. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
