

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (12): 2894-2905.doi: 10.16182/j.issn1004731x.joss.24-0566
• Papers • Previous Articles Next Articles
Liu Hongfu1, Fu Yajing1, Zhang Wanpeng1, Zhang Hu2
Received:2024-05-24
Revised:2024-09-03
Online:2024-12-20
Published:2024-12-20
CLC Number:
Liu Hongfu, Fu Yajing, Zhang Wanpeng, Zhang Hu. Algorithm and Semi-physical System Simulation for Command Intent Recognition of UAV in Low-resource Environment[J]. Journal of System Simulation, 2024, 36(12): 2894-2905.

Fig. 1
Whole framework of hardware-in-the-loop simulation system
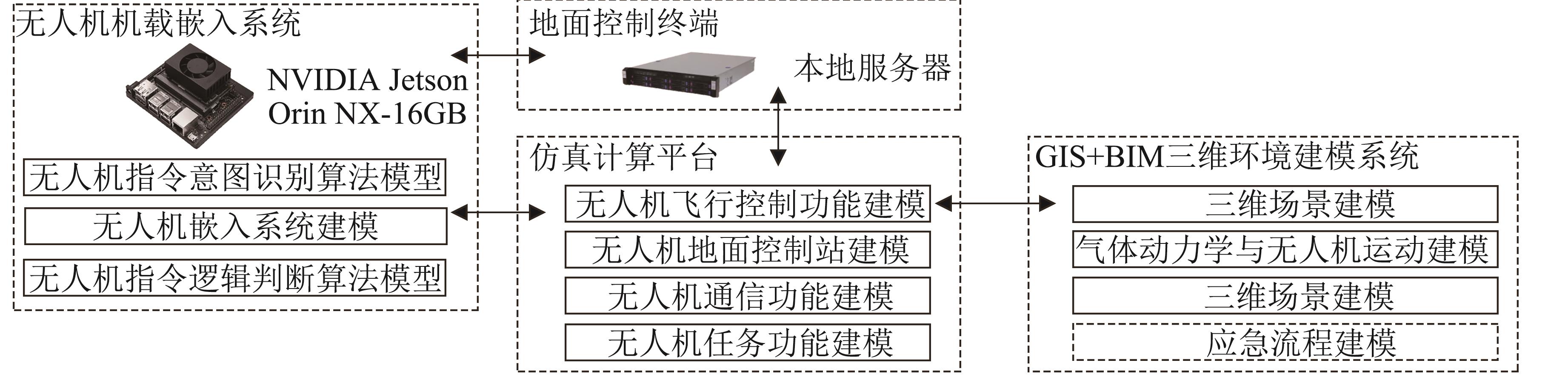
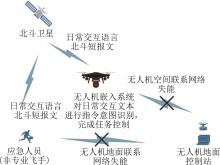
Fig. 2
Low resoure UAV command intent application
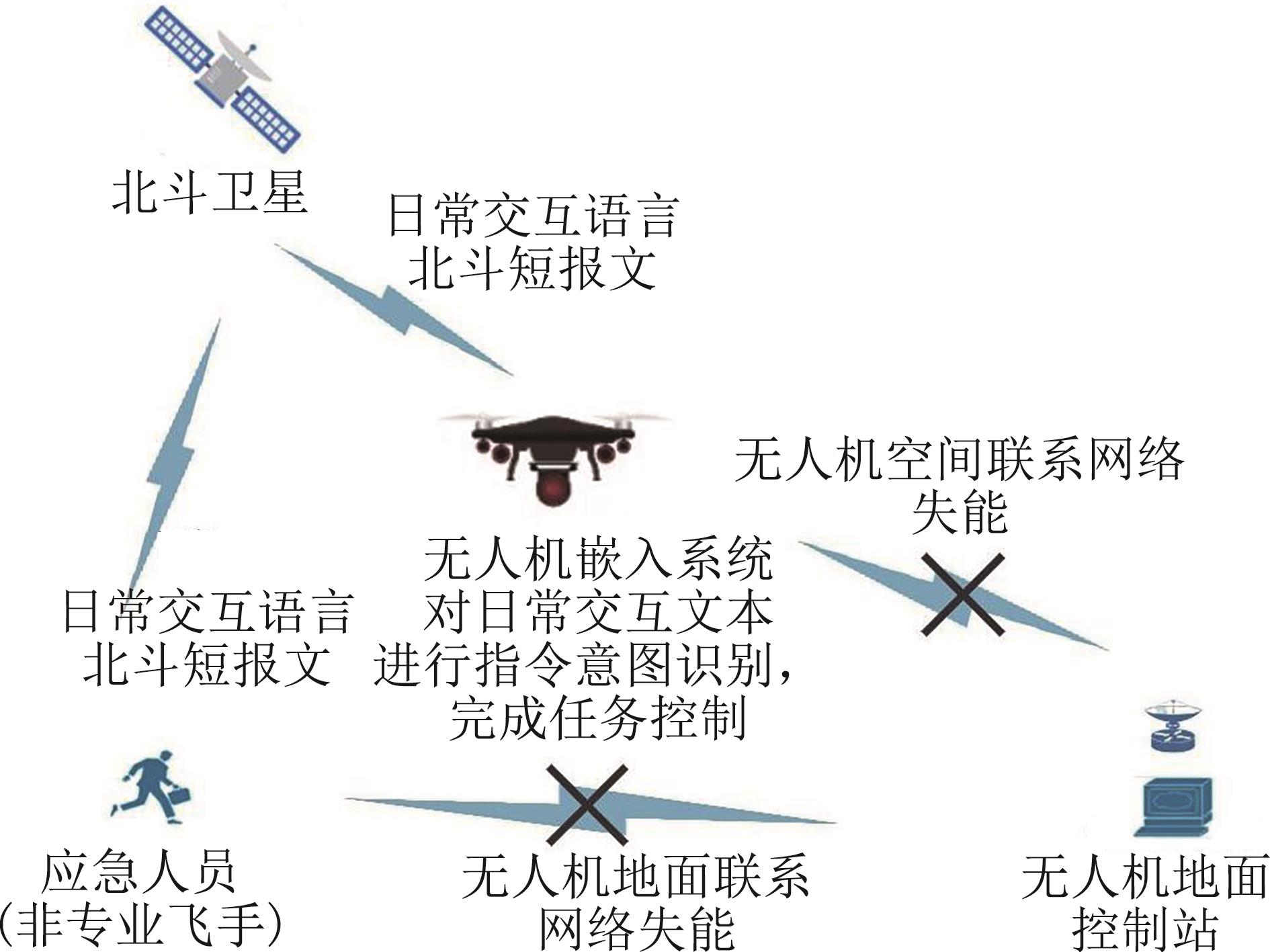
Fig. 3
Overall structure of algorithm model
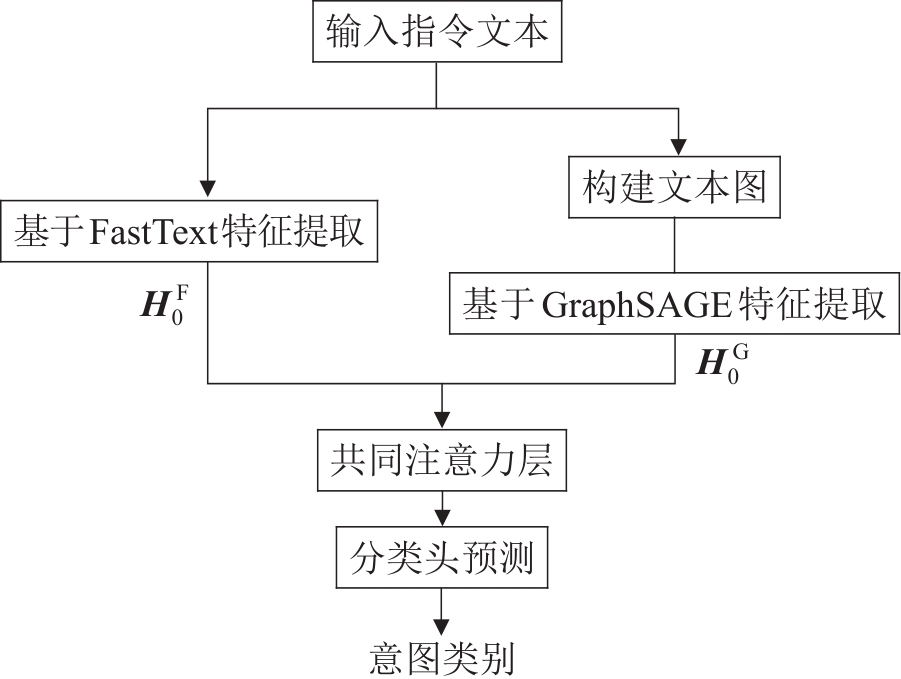
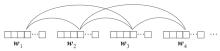
Fig. 4
Text graph
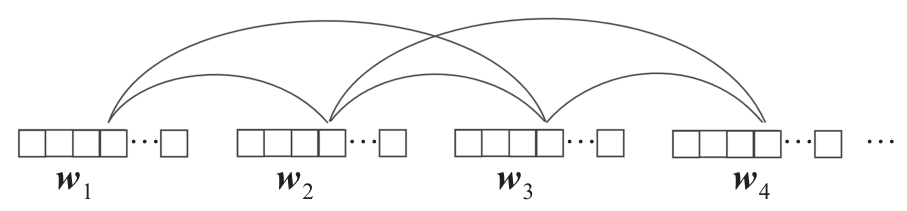

Fig. 5
GraphSAGE two-level neighbor sampling
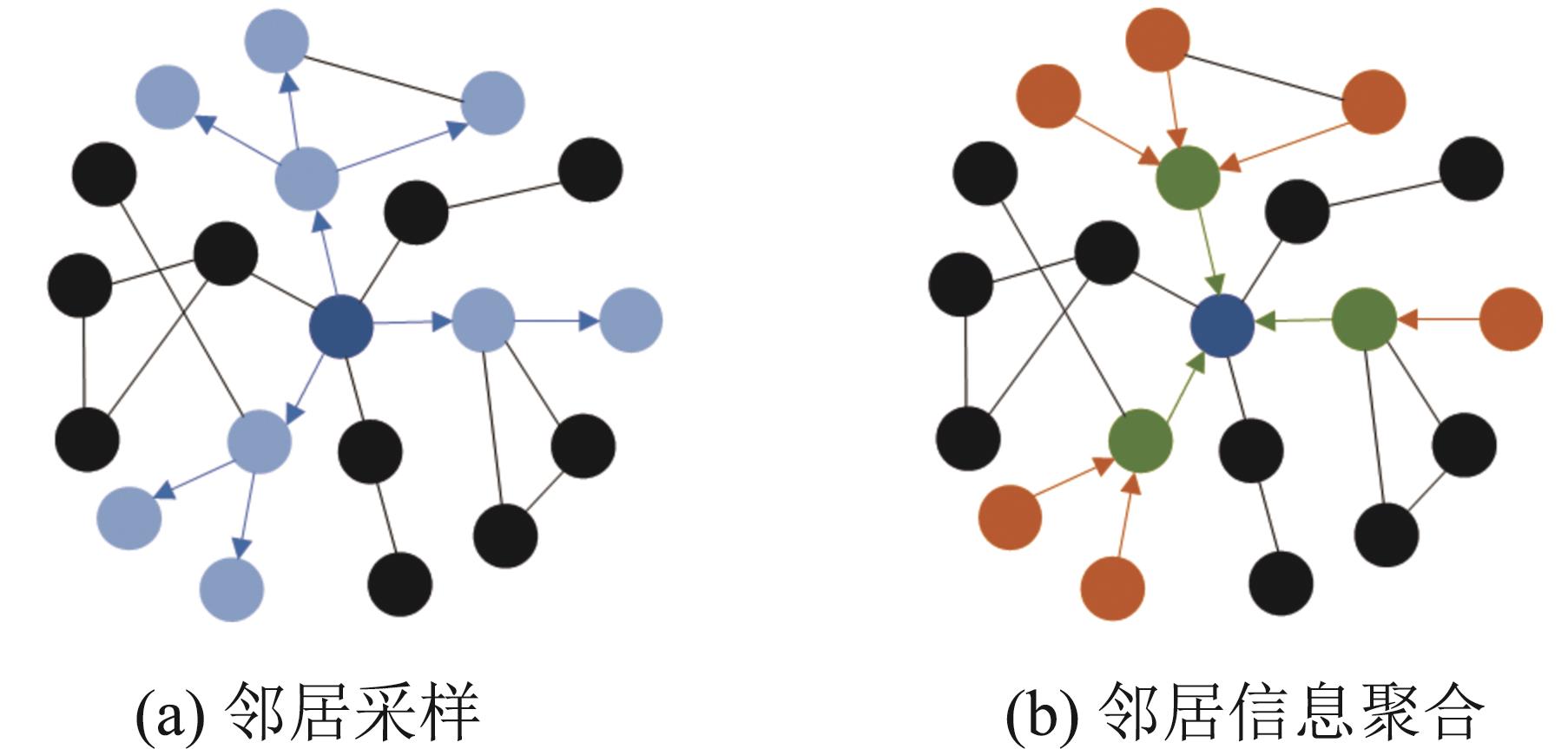

Fig. 6
Co-attention layer
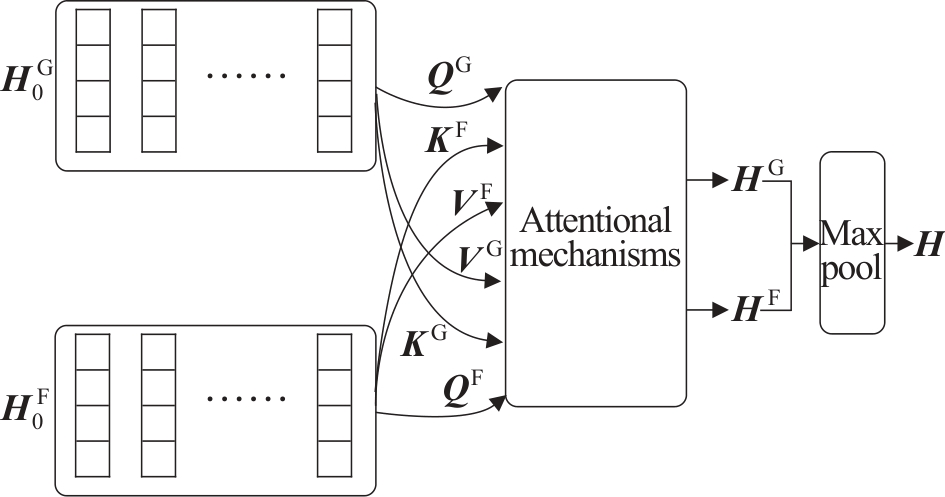

Fig. 7
Emergency rescue intelligent UAV system simulation diagram
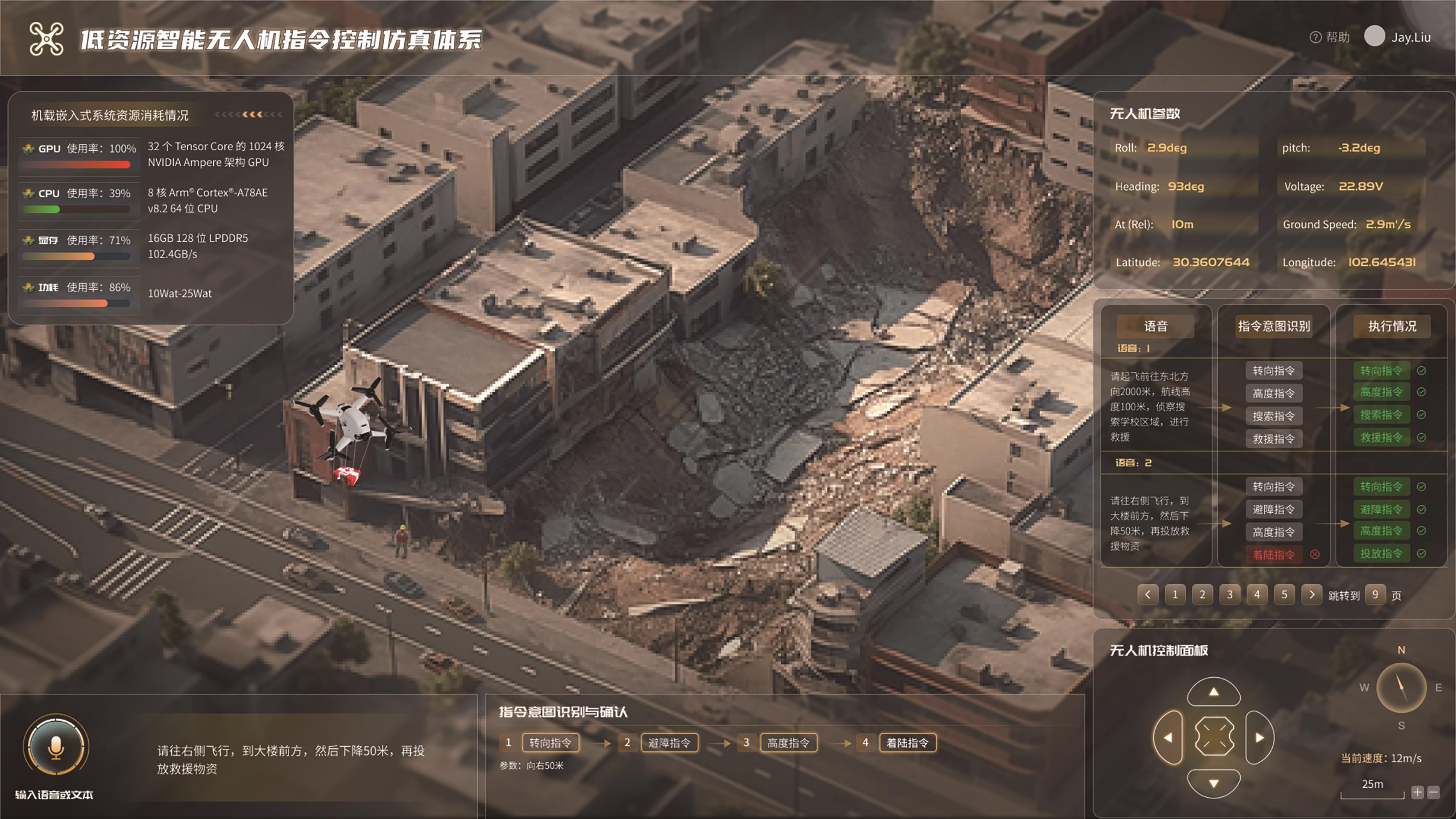

Fig. 8
Usage chart of embedded simulation resources for intelligent drones onboard


Fig. 9
Command intention recognition and execution effect of unmanned aerial vehicles
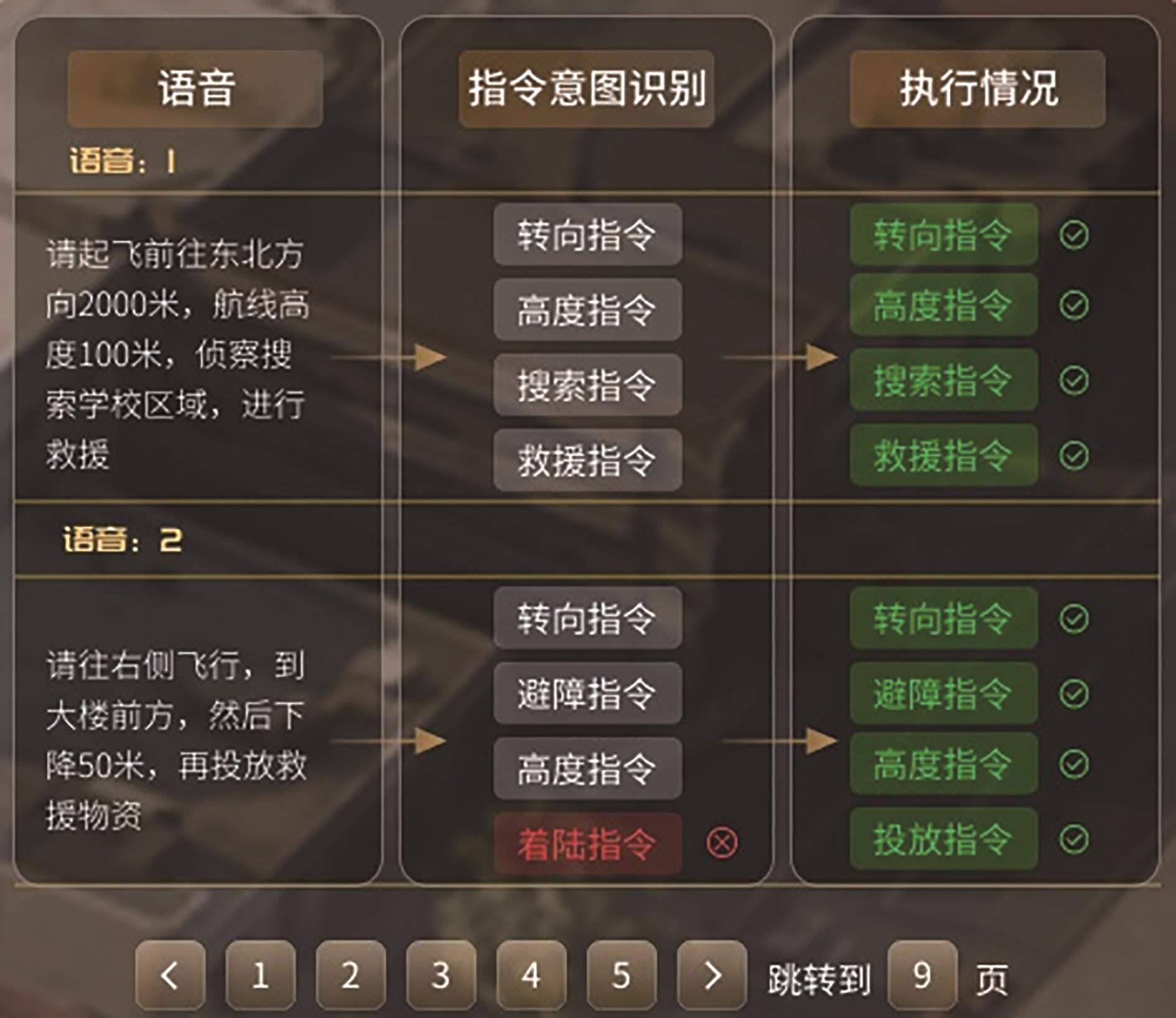
Table 1
Algorithm comparison experimental results
| 算法 | A | F1 | R |
|---|---|---|---|
| TextCNN | 0.875 2 | 0.873 9 | 0.875 0 |
| TextRNN | 0.863 5 | 0.855 6 | 0.862 1 |
| TextRCNN | 0.875 4 | 0.875 3 | 0.874 8 |
| DPCNN | 0.872 5 | 0.872 0 | 0.870 0 |
| BERT | 0.897 2 | 0.888 2 | 0.887 0 |
| ERNIE | 0.881 0 | 0.877 7 | 0.874 3 |
| 本文 | 0.890 7 | 0.889 0 | 0.889 0 |
Table 2
Algorithm ablation experimental performance
| 算法 | A | F1 | R |
|---|---|---|---|
| 本文 | 0.890 7 | 0.889 0 | 0.889 0 |
| Ⅰ | 0.673 8 | 0.680 3 | 0.680 0 |
| Ⅱ | 0.867 2 | 0.863 5 | 0.863 5 |
| Ⅲ | 0.881 5 | 0.878 6 | 0.880 0 |
| Ⅳ | 0.793 4 | 0.800 7 | 0.793 0 |
Table 3
Algorithm comparison experimental results
| 算法 | 训练时间/min | 预测时间/ms |
|---|---|---|
| TextCNN | 21.317 | 507.239 |
| TextRNN | 43.617 | 1 042.942 |
| TextRCNN | 26.100 | 684.258 |
| DPCNN | 33.217 | 671.357 |
| BERT | 158.233 | 13 608.010 |
| ERNIE | 187.875 | 13 151.264 |
| 本文模型 | 29.633 | 58.808 |
| 1 | Duan Haibin, Shao Shan, Su Bingwei, et al. New Development Thoughts on the Bio-inspired Intelligence Based Control for Unmanned Combat Aerial Vehicle[J]. Science China Technological Sciences, 2010, 53(8): 2025-2031. |
| 2 | 王正义, 陈邓安. 美无人机系统当前和今后担负的任务及其发展趋势[J]. 中国电子科学研究院学报, 2023, 18(2): 195-202. |
| Wang Zhengyi, Chen Dengan. The Present and Future Tasks and Development Trends of Unmanned Aircraft System in the United States[J]. Journal of China Academy of Electronics and Information Technology, 2023, 18(2): 195-202. | |
| 3 | Wang Yuhao, Pang Yutian, Gorceski Stojanche, et al. A Voice Communication-augmented Simulation Framework for Aircraft Trajectory Simulation[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 7310-7320. |
| 4 | Aletras N, Tsarapatsanis D, Preoţiuc-Pietro D, et al. Predicting Judicial Decisions of the European Court of Human Rights: A Natural Language Processing Perspective[J]. PeerJ Computer Science, 2016, 2: e93. |
| 5 | 王康静, 钱江海. 一种融合改进TF-IDF与词典模型的情感分类算法[J]. 上海电力大学学报, 2024, 40(1): 80-86. |
| Wang Kangjing, Qian Jianghai. An Improved Emotion Classification Algorithm Based on Improved TF-IDF and Dictionary Model[J]. Journal of Shanghai University of Electric Power, 2024, 40(1): 80-86. | |
| 6 | Jeong Minwoo, Geunbae Lee Gary. Jointly Predicting Dialog Act and Named Entity for Spoken Language Understanding[C]//2006 IEEE Spoken Language Technology Workshop. Piscataway: IEEE, 2006: 66-69. |
| 7 | Zhang Chenwei, Li Yaliang, Du Nan, et al. Joint Slot Filling and Intent Detection via Capsule Neural Networks[C]//Proceedings of the 57th Annual Meeting of the Association for Computational Linguistics. Stroudsburg: ACL, 2019: 5259-5267. |
| 8 | 刘鹏宇, 朱雪耀. 基于深度学习的融合空域空管指令语义解析技术[J]. 航空学报, 2023, 44(增1): 155-163. |
| Liu Pengyu, Zhu Xueyao. Semantic Parsing Technology of Air Traffic Control Instruction in Fusion Airspace Based on Deep Learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(S1): 155-163. | |
| 9 | 符凯, 朱雪耀, 吕全喜, 等. 基于深度学习的无人机指令意图识别技术[J]. 兵工自动化, 2022, 41(10): 41-44, 59. |
| Fu Kai, Zhu Xueyao, Quanxi Lü, et al. UAV Command Intent Identification Technology Based on Deep Learning[J]. Ordnance Industry Automation, 2022, 41(10): 41-44, 59. | |
| 10 | 关景文, 宋晓, 李晓庆, 等. 导弹领域文本嵌套命名实体识别方法研究[J]. 系统仿真学报, 2023, 35(8): 1757-1767. |
| Guan Jingwen, Song Xiao, Li Xiaoqing, et al. Research on Nested Named Entity Recognition in Missile Field Text[J]. Journal of System Simulation, 2023, 35(8): 1757-1767. | |
| 11 | Zhang Pan, Huang Li. Research on Chinese Intent Recognition Based on BERT Pre-trained Model[C]//Proceedings of the 2020 5th International Conference on Mathematics and Artificial Intelligence. New York: ACM, 2020: 128-132. |
| 12 | Wang Yaqing, Wang Song, Li Yanyan, et al. Recognizing Medical Search Query Intent by Few-shot Learning[C]//Proceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval. New York: ACM, 2022: 502-512. |
| 13 | Sharma Bidisha, Madhavi Maulik, Li Haizhou. Leveraging Acoustic and Linguistic Embeddings from Pretrained Speech and Language Models for Intent Classification[C]//ICASSP 2021-2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Piscataway: IEEE, 2021: 7498-7502. |
| 15 | Hamilton W L, Ying R, Leskovec J. Inductive Representation Learning on Large Graphs[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 1025-1035. |
| 16 | Bojanowski P, Grave E, Joulin A, et al. Enriching Word Vectors with Subword Information[J]. Transactions of the Association for Computational Linguistics, 2017, 5: 135-146. |
| 17 | Chen Y. Convolutional Neural Network for Sentence Classification[D]. Waterloo: University of Waterloo, 2015. |
| 18 | Liu Pengfei, Qiu Xipeng, Huang Xuanjing. Recurrent Neural Network for Text Classification with Multi-task Learning[C]//Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2016: 2873-2879. |
| 19 | Lai Siwei, Xu Liheng, Liu Kang, et al. Recurrent Convolutional Neural Networks for Text Classification[C]//Proceedings of the Twenty-ninth AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2015: 2267-2273. |
| 20 | Johnson R, Zhang Tong. Deep Pyramid Convolutional Neural Networks for Text Categorization[C]//Proceedings of the 55th Annual Meeting of the Association for Computational Linguistics. Stroudsburg: ACL, 2017: 562-570. |
| 21 | Devlin J, Chang Mingwei, Lee K, et al. BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding[C]//Proceedings of the 2019 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies. Stroudsburg: ACL, 2019: 4171-4186. |
| 22 | Sun Yu, Wang Shuohuan, Li Yukun, et al. ERNIE: Enhanced Representation Through Knowledge Integration[EB/OL]. (2019-04-19) [2024-04-20]. . |
| [1] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [2] | Yang Can, Chen Kai, Zhu Feng. Reinforcement Learning Based Method for UAV Team Orienteering Optimization under Multi-constraint Condition [J]. Journal of System Simulation, 2026, 38(2): 360-371. |
| [3] | Yang Xuesen, Zhao Wei, Zhang Binglong, Ren Sanqun, Xiang Xiaorong, Zhao Qingjun. Study on Semi-physical Simulation Method of Air Turbo Rocket Engine in Startup Process [J]. Journal of System Simulation, 2025, 37(8): 2061-2073. |
| [4] | Qu Changhong, Wang Junjie, Wang Kun, Cui Qingyong, Chen Jiangyang, Wang Xinpeng. A Modeling and Simulation Method for Firepower Intelligent Decision-making of Directed Energy System Based on Joint DQN [J]. Journal of System Simulation, 2025, 37(5): 1256-1265. |
| [5] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [6] | Yang Chao, Zheng Ruiqun, Li Zhen, Zhang Hongwei, Tang Yanqun, Li Dongze. Parallel Task Transmission and Processing Optimization Scheme for UAV-assisted Internet of Vehicles [J]. Journal of System Simulation, 2025, 37(3): 635-645. |
| [7] | Hu Shijun, Liu Hailiang, Wang Binglei, Su Wenke. Quadrotor UAV Path Planning Based on Rapidly-exploration Directional Tree Algorithm [J]. Journal of System Simulation, 2025, 37(2): 311-324. |
| [8] | Peng Yi, Lei Yunkui, Yang Qingqing, Li Hui, Wang Jianming. Improved PID Search Algorithm for UAV Path Planning in Mountainous Environments [J]. Journal of System Simulation, 2025, 37(12): 3075-3086. |
| [9] | Li Boning, Chen Ming, Qi Shuchang, Meng Haoran, Wang Lei. Attitude Control of Quadrotor UAV Based on Disturbance Observer and Command Filtering [J]. Journal of System Simulation, 2025, 37(11): 2793-2803. |
| [10] | Liang Xiuman, Liu Ziliang, Liu Zhendong. Path Planning of Improved RRT Algorithm Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(10): 2578-2593. |
| [11] | Huang Zhiqin, Lu Tianying, Chen Zheyi. Multi-UAV Deployment and Collaborative Offloading for Large-scale IoT Systems [J]. Journal of System Simulation, 2025, 37(1): 25-39. |
| [12] | Yin Anlin, Zhang Zhuhong. UAV Path Planning in Complex Environments and Its Improved Artificial Rabbits Optimization Algorithm [J]. Journal of System Simulation, 2025, 37(1): 79-94. |
| [13] | Li Erchao, Zhang Shenghui. UAV Online Track Planning Based on DMOEA-APTC Algorithm [J]. Journal of System Simulation, 2024, 36(9): 2086-2099. |
| [14] | Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(8): 1843-1853. |
| [15] | Huang Zhifeng, Liu Yuanhua. UAV Path Planning Based on Improved Harris Hawk Algorithm and B-spline Curve [J]. Journal of System Simulation, 2024, 36(7): 1509-1524. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
