

Journal of System Simulation ›› 2022, Vol. 34 ›› Issue (10): 2293-2302.doi: 10.16182/j.issn1004731x.joss.21-0552
• VV&A Technology • Previous Articles Next Articles
Fuzhen Zhang( ), Yaoqin Zhu()
), Yaoqin Zhu()
Received:2021-06-15
Revised:2021-07-30
Online:2022-10-30
Published:2022-10-18
Contact:
Yaoqin Zhu
E-mail:1376868256@qq.com;zhuyaoqin@njust.edu.cn
CLC Number:
Fuzhen Zhang, Yaoqin Zhu. Task Allocation Method for Multi-UAV Cooperative Reconnaissance in Complex Environment[J]. Journal of System Simulation, 2022, 34(10): 2293-2302.
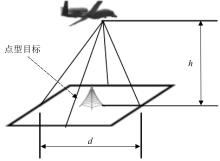
Fig. 1
Point target
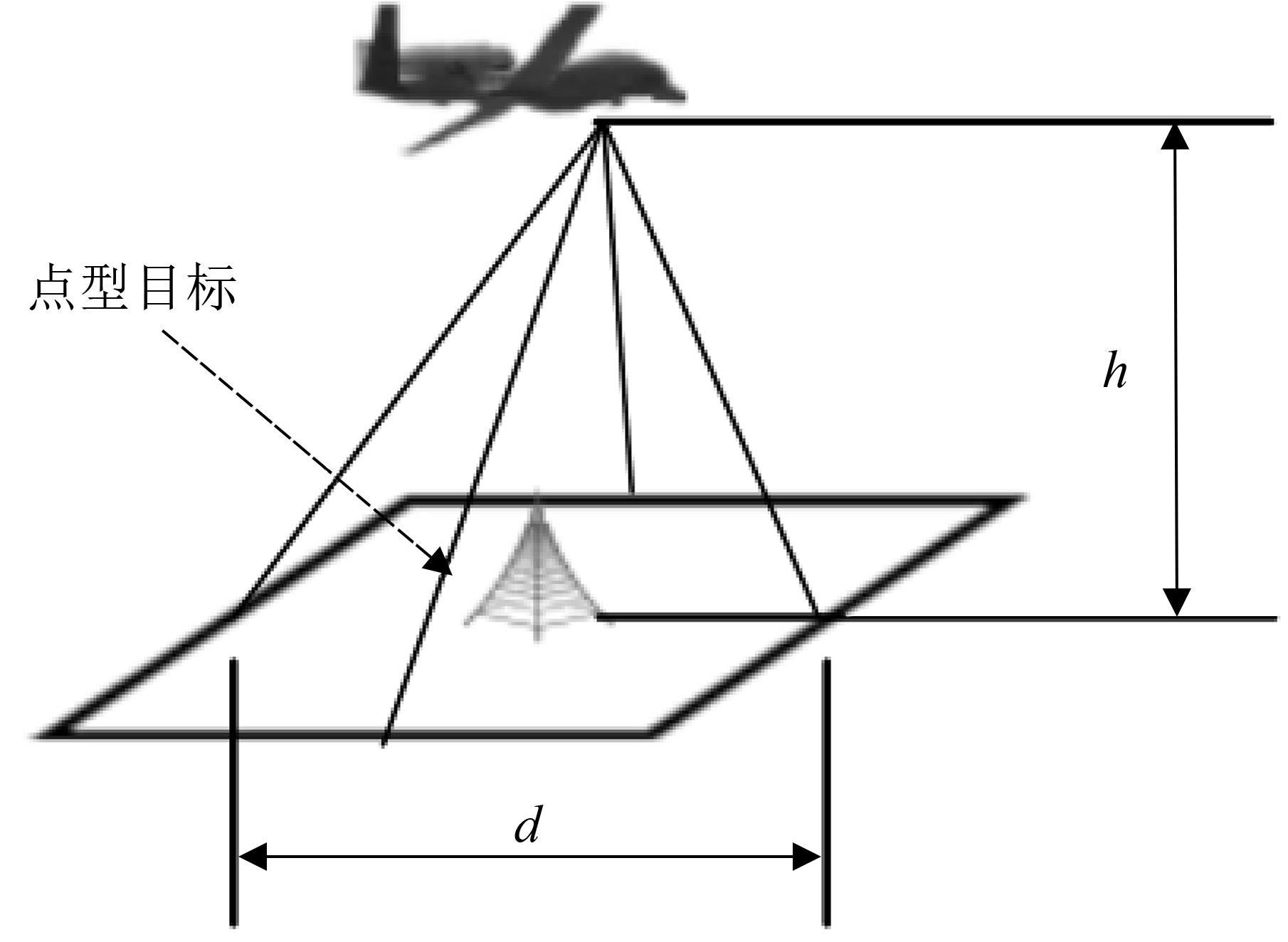
Fig. 2
Linear target
Fig. 3
Surface target
Fig. 4
Schematic of flight path calculation
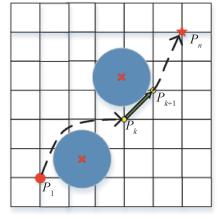
Fig. 5
Schematic of track connection
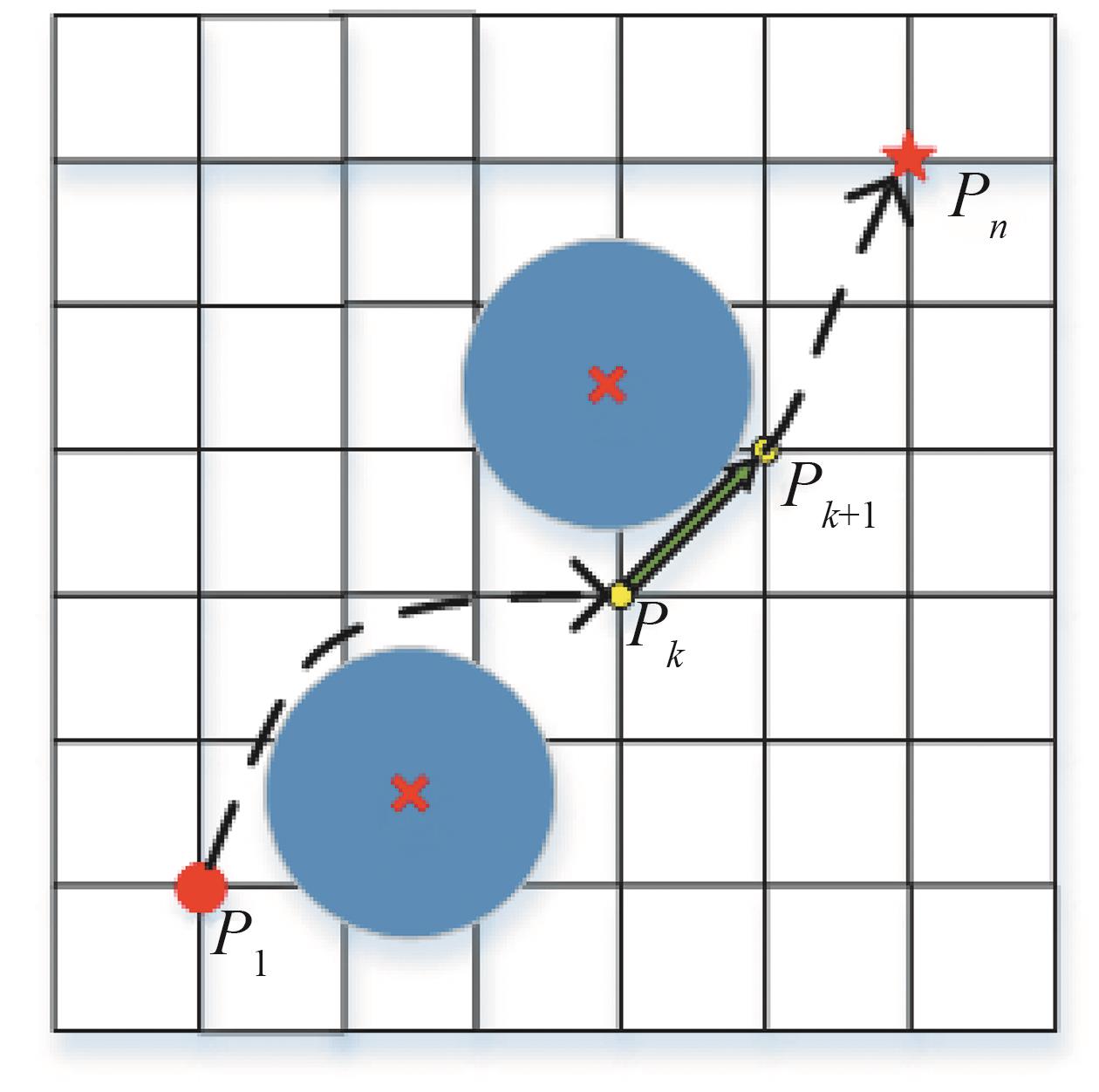
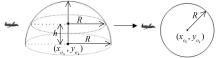
Fig. 6
Schematic of UAV flight section
Table 1
UAV attribute information
| 无人机编号 | 坐标/km | 速度/(m/s) | 高度/m | 侦察角/(°) |
|---|---|---|---|---|
| UAV1 | (10, 40) | 40 | 20 | 90 |
| UAV2 | (20, 20) | 40 | 20 | 90 |
| UAV3 | (40, 10) | 40 | 20 | 90 |
| UAV4 | (70, 20) | 40 | 20 | 90 |
Table 2
Target attribute information
| 目标编号 | 目标坐标/km | 目标 类型 |
|---|---|---|
| T1 | (55, 175)、(65, 175)、(65, 185)、(55, 185) | 点型 |
| T2 | (155, 125)、(165, 125)、(165, 135)、 (155, 135) | 点型 |
| T3 | (130, 170)、(190, 170)、(190, 180)、(130, 180) | 线型 |
| T4 | (160, 80)、(200, 80)、(200, 110)、(160, 110) | 面型 |
Table 3
No-fly zone and threat area information
| 区域编号 | 区域中心坐标/km | 区域半径/km | 区域类型 |
|---|---|---|---|
| R1 | 端点坐标:(20, 110)、(50, 110)、(50, 150)、(40, 150)、(20, 140) | 无 | 禁飞区 |
| R2 | (70, 90) | 20 | 天气威胁 |
| R3 | (50, 105) | 20 | 天气威胁 |
| R4 | (130, 100) | 20 | 雷达威胁 |
| R5 | (120, 40) | 30 | 高炮威胁 |
| R6 | (130, 70) | 20 | 高炮威胁 |
| R7 | (90, 150) | 15 | 导弹威胁 |
| R8 | (50, 40) | 10 | 山体威胁 |
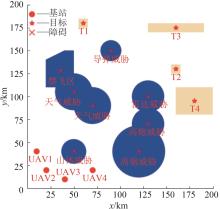
Fig. 7
Schematic diagram of simulation map
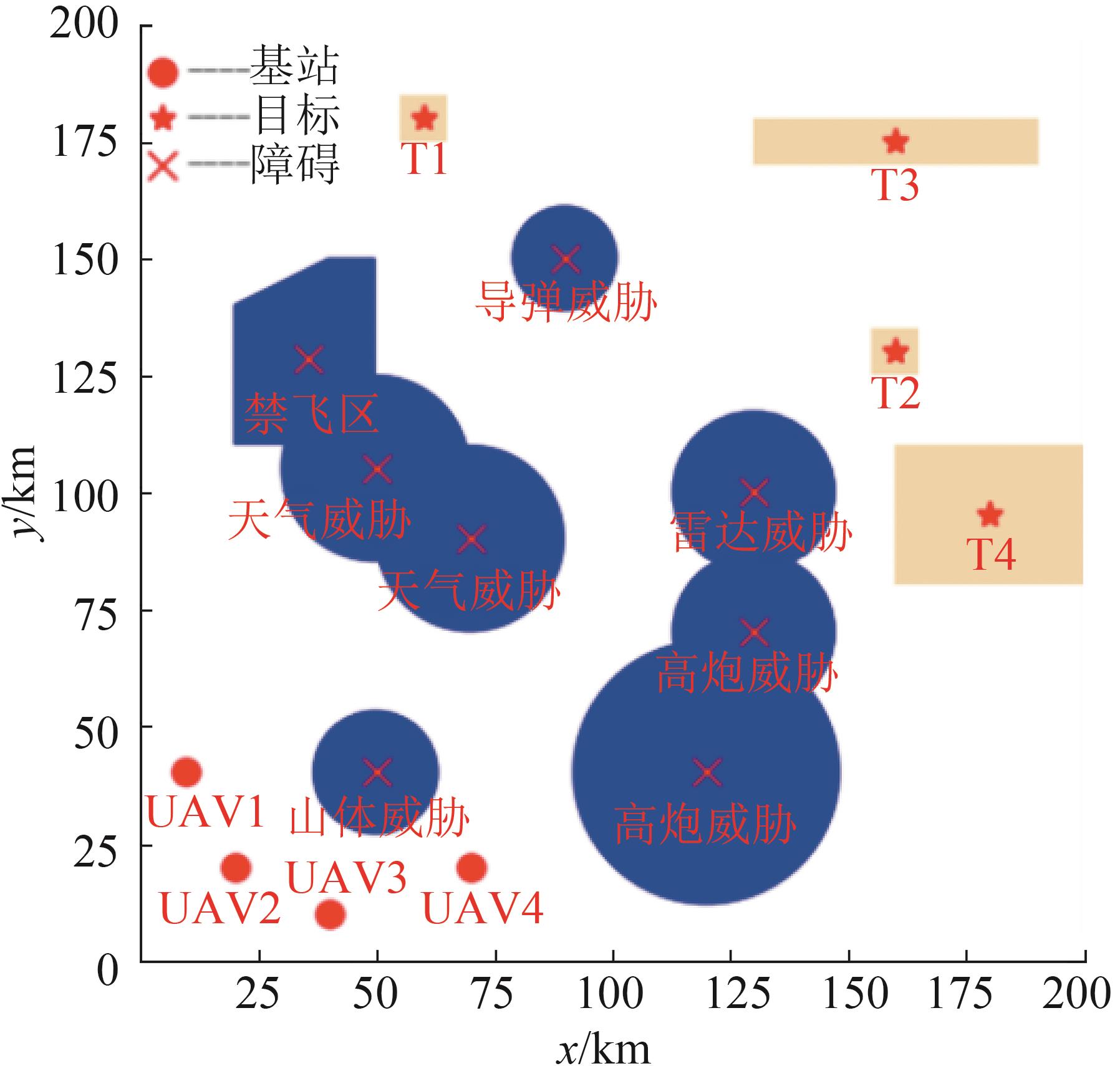
Table 4
Two algorithms are used to plan flight path results
| 目标 | 经典PSO-AFSA | 改进PSO-AFSA |
|---|---|---|
| T1 | 319.85 | 321.04 |
| T2 | 364.28 | 364.99 |
| T3 | 495.81 | 494.95 |
| T4 | 515.26 | 515.68 |
Fig. 8
Classical PSO-AFSA planning results
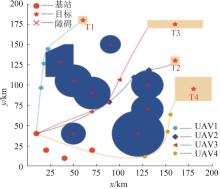
Fig. 9
Improved PSO-AFSA planning results
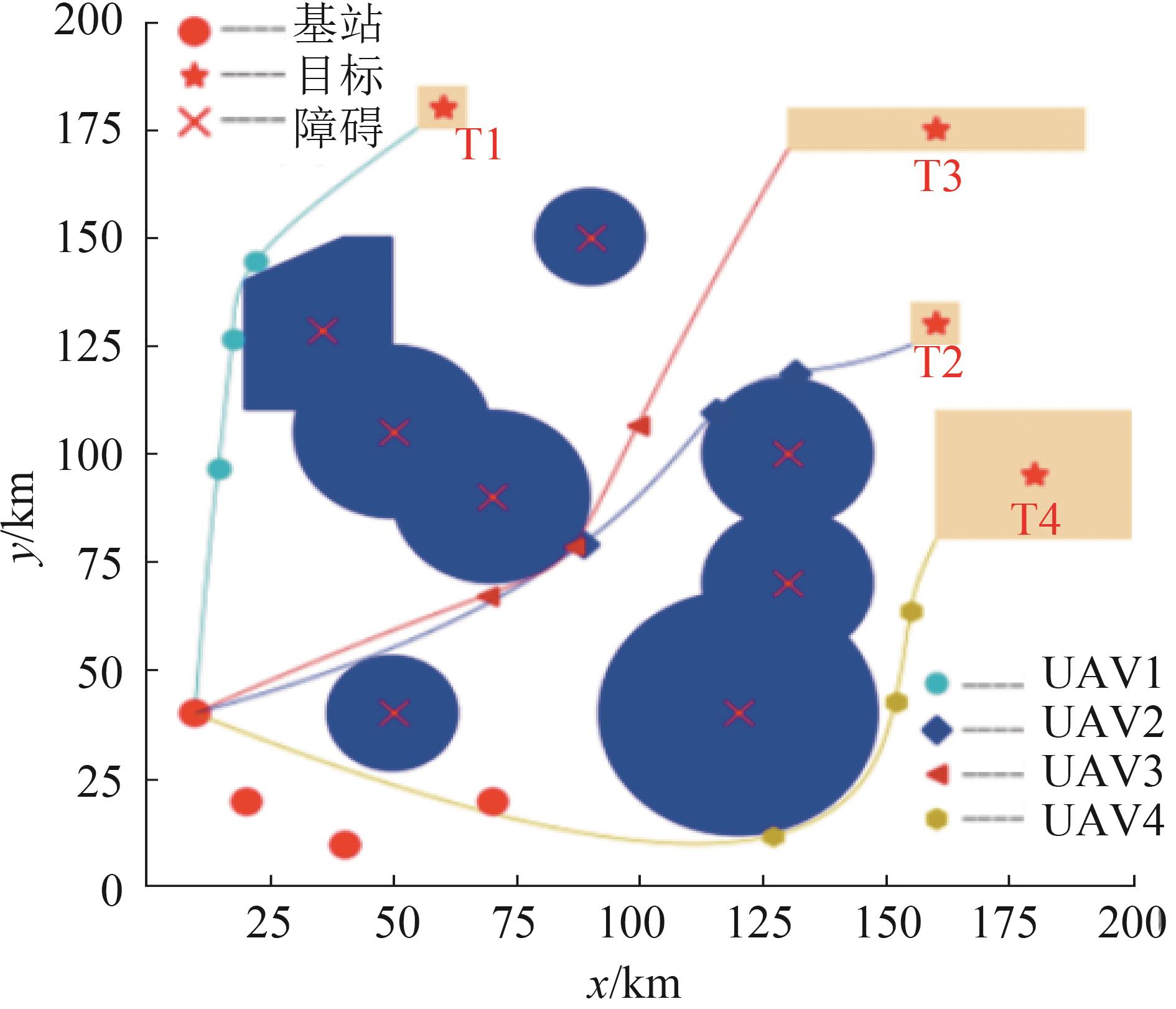
Fig. 10
Distribution results of classical PSO-AFSA without preplanning
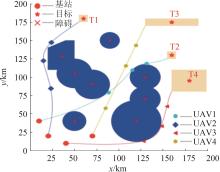
Fig. 11
Distribution results of improved PSO-AFSA without preplanning
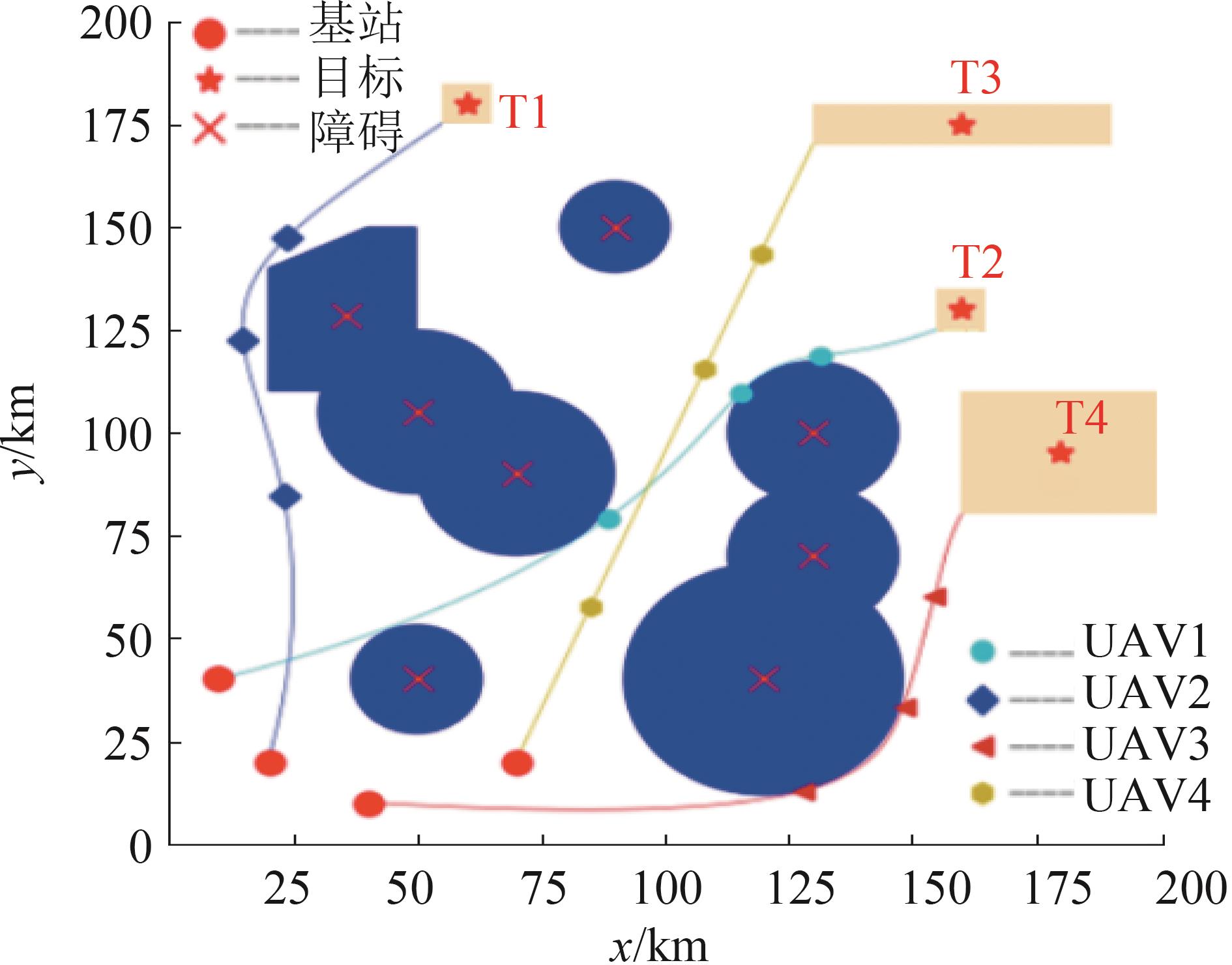
Fig. 12
Distribution results of classical PSO-AFSA under preplanning
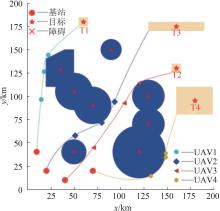
Fig.13
Distribution results of PSO-AFSA were improved under preplanning
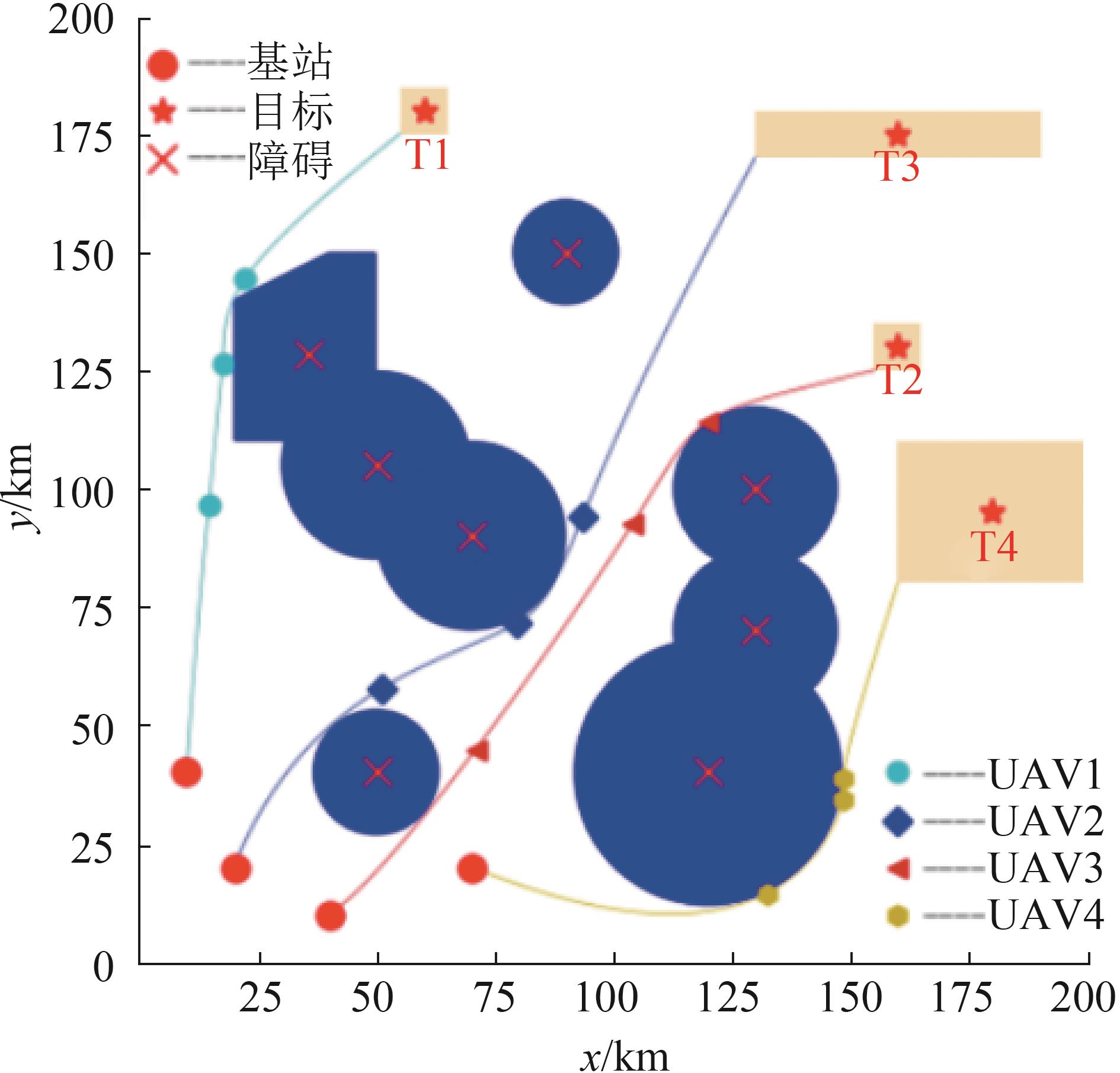
Table 5
The task cost under each assignment result
| 无人机 | 未预规划下的任务分配 | 预规划下的任务分配 | ||||||
|---|---|---|---|---|---|---|---|---|
| 经典PSO-AFSA | 改进PSO-AFSA | 经典PSO-AFSA | 改进PSO-AFSA | |||||
| 目标 | 任务代价 | 目标 | 任务代价 | 目标 | 任务代价 | 目标 | 任务代价 | |
| 总代价 | 1 736.60 | 1 617.51 | 1 603.63 | 1 570.69 | ||||
| UAV1 | T2 | 364.27 | T2 | 364.99 | T1 | 319.85 | T1 | 321.04 |
| UAV2 | T1 | 425.64 | T1 | 365.62 | T4 | 486.64 | T3 | 505.58 |
| UAV3 | T4 | 503.58 | T4 | 443.79 | T3 | 489.43 | T2 | 357.41 |
| UAV4 | T3 | 443.11 | T3 | 443.11 | T2 | 307.71 | T4 | 386.66 |
| 1 | Wang Jianfeng, Jia Gaowei, Lin Juncan, et al. Cooperative Task Allocation for Heterogeneous Multi-UAV Using Multi-Objective Optimization Algorithm[J]. Journal of Central South University(S2095-2899), 2020, 27(2): 432-448. |
| 2 | 梁星星, 马扬, 冯旸赫, 等. 面向多旅行商问题的多目标模拟退火算法研究[J]. 南京师大学报(自然科学版), 2017, 40(3): 80-86. |
| Liang Xingxing, Ma Yang, Feng Yanghe, et al. Research on Multi-Objective Simulated Annealing Algorithm for Multi-Traveling Salesman Problem[J]. Journal of Nanjing Normal University(Natural Science Edition), 2017, 40(3): 80-86. | |
| 3 | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40(9): 1986-1992. |
| Lin Juncan, Jia Gaowei, Hou Zhongxi. Research on Task Assignment of Heterogeneous UAV Formation in the Anti-Radar Combat[J]. Systems Engineering and Electronics, 2018, 40(9): 1986-1992. | |
| 4 | 田震, 王晓芳. 基于多基因遗传算法的异构多无人机协同任务分配[J].飞行力学, 2019, 37(1): 39-44. |
| Tian Zhen, Wang Xiaofang. Cooperative Multiple Task Assignment for Heterogeneous Multi-UAVs with Multi-Chromosome Genetic Algorithm[J]. Flight Dynamics, 2019, 37(1): 39-44. | |
| 5 | 严飞, 祝小平, 周洲, 等. 考虑同时攻击约束的多异构无人机实时任务分配[J]. 中国科学: 信息科学, 2019, 49(5): 555-569. |
| Yan Fei, Zhu Xiaoping, Zhou Zhou, et al. Real-Time Task Allocation for a Heterogeneous Multi-UAV Simultaneous[J]. Scientia Sinica Informationis, 2019, 49(5): 555-569. | |
| 6 | 姚雨, 李庆, 陈曦. 优化的A* 算法在航迹规划上的应用[J]. 微电子学与计算机, 2017, 34(7): 51-55. |
| Yao Yu, Li Qing, Chen Xi. Optimization of the Application of A* Algorithm in Path Planning[J]. Microelectronics & Computer, 2017, 34(7): 51-55. | |
| 7 | 陈晋音, 胡可科, 李玉玮. 基于MB-RRT*的无人机多点航迹规划算法研究[J]. 计算机科学, 2018, 45(增1): 85-90. |
| Chen Jinyin, Hu Keke, Li Yuwei. Research on UAV Multi-Point Navigation Algorithm Based on MB-RRT*[J]. Computer Science, 2018, 45(S1): 85-90. | |
| 8 | Volkan Pehlivanoglu Y. A New Vibrational Genetic Algorithm Enhanced with a Voronoi Diagram for Path Planning of Autonomous UAV[J]. Aerospace Science and Technology(S1270-9638), 2012, 16(1): 47-55. |
| 9 | 王闯, 董宏丽, 谷星澍, 等. 改进粒子群算法及其在航迹规划中的应用[J]. 控制工程, 2019, 26(8): 1466-1471. |
| Wang Chuang, Dong Hongli, Gu Xingshu, et al. Improved Particle Swarm Optimization Algorithm and Its Application Path Planning[J]. Control Engineering of China, 2019, 26(8): 1466-1471. | |
| 10 | 周青, 张锐, 索晓杰, 等. 具有时间约束的无人机遗传算法航迹规划[J]. 航空计算技术, 2016, 46(2): 93-96, 101. |
| Zhou Qing, Zhang Rui, Suo Xiaojie, et al. Genetic Algorithm for UAV Trajectory Planning with Timing Constraints[J]. Aeronautical Computing Technique, 2016, 46(2): 93-96, 101. | |
| 11 | 韩攀, 陈谋, 陈哨东, 等. 基于改进蚁群算法的无人机航迹规划[J]. 吉林大学学报(信息科学版), 2013, 31(1): 66-72. |
| Han Pan, Chen Mou, Chen Shaodong, et al. Path Planning for UAVs Based on Improved Ant Colony Algorithm[J]. Journal of Jilin University(Information Science Edition), 2013, 31(1): 66-72. | |
| 12 | Kouibia A, Pasadas M. An Approximation Problem of Noisy Data By Cubic and Bicubic Splines[J].Applied Mathematical Modelling(S0307-904X), 2012, 36(9): 4135-4145. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [3] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [4] | Huang Shijie, Zhang Zhensheng, Cai Jing, Zhang Rui. Research on Modeling, Optimization and Application of Aeroengine Oil System [J]. Journal of System Simulation, 2025, 37(5): 1266-1279. |
| [5] | Li Min, Zhang Sen, Zeng Xiangguang, Wang Gang, Zhang Tongwei, Xie Dijie, Ren Wenzhe, Zhang Tao. Trajectory Planning of Quadruped Robot Over Obstacle with Single Leg Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(4): 895-909. |
| [6] | Xiong Jun, Zhang Wenbo, Xiong Zhi, Zhou Feng, Yang Bo. Survey of Cooperative Multi-Agent Path Finding [J]. Journal of System Simulation, 2025, 37(12): 3033-3049. |
| [7] | Wang Zhu, Zhang Zhenpeng, Zhang Mengtong, Xu Guangtong. Sequential Convex Programming Using Safe Flight Corridor for Trajectory Planning of UAVs [J]. Journal of System Simulation, 2025, 37(1): 134-144. |
| [8] | Zhang Wei, Jiang Yuefeng. Adaptive Particle Swarm Optimization Algorithm Based on Trap Label and Lazy Ant [J]. Journal of System Simulation, 2024, 36(7): 1631-1642. |
| [9] | Xiao Peng, Xie Feng, Ni Haihong, Zhang Min, Tang Zhili, Li Ni. Research on Collaborative Optimization Method of Multi-UAV Task Allocation and Path Planning [J]. Journal of System Simulation, 2024, 36(5): 1141-1151. |
| [10] | Cheng Jie, Zheng Yuan, Li Chenglong, Jiang Bo. Multi-UAV Collaborative Trajectory Planning Algorithm for Urban Ultra-low-altitude Air Transportation Scenario [J]. Journal of System Simulation, 2024, 36(1): 50-66. |
| [11] | Jiayi Liu, Gang Wang, Qiang Fu, Xiangke Guo, Siyuan Wang. Intelligent Air Defense Task Assignment Based on Assignment Strategy Optimization Algorithm [J]. Journal of System Simulation, 2023, 35(8): 1705-1716. |
| [12] | Wanjie Hu, Jianjun Dong, Rui Ren, Zhilong Chen. Layout Planning of Metro-based Underground Logistics System Network Considering Fuzzy Uncertainties [J]. Journal of System Simulation, 2022, 34(8): 1725-1740. |
| [13] | Feibo Feng, Xingde Yan, Baoqiang Zheng, Xiaofeng Yin, Mengzhen Zhou, Xin Jiang. Bi-Level Optimization of Distribution Network for Hybrid Energy Storage System of Storage Battery and Hydrogen Storage [J]. Journal of System Simulation, 2022, 34(7): 1405-1416. |
| [14] | Lixin Ma, Ying Cheng. Optimal Operation for Park Integrated Energy System Considering Interruptible Loads [J]. Journal of System Simulation, 2022, 34(4): 817-825. |
| [15] | Kaiqing Zhang, Qichun Ji. Research on Multi-depot Half-open Vehicle Routing Problem with Time-varying Speed [J]. Journal of System Simulation, 2022, 34(4): 836-846. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
