

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (8): 1958-1968.doi: 10.16182/j.issn1004731x.joss.23-0783
• Papers • Previous Articles Next Articles
Kang Liang1, Du Yi2, Yin Lihua1
Received:2023-06-29
Revised:2023-09-15
Online:2024-08-15
Published:2024-08-19
CLC Number:
Kang Liang, Du Yi, Yin Lihua. An Improved Cat Swarm Optimization for Heterogeneous Multiple Mobile Robots[J]. Journal of System Simulation, 2024, 36(8): 1958-1968.
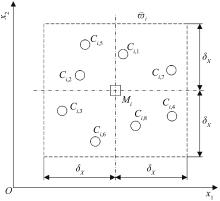
Fig. 1
Child robot si,j=Ci,j in parent robot si=Mi subdomain ?i
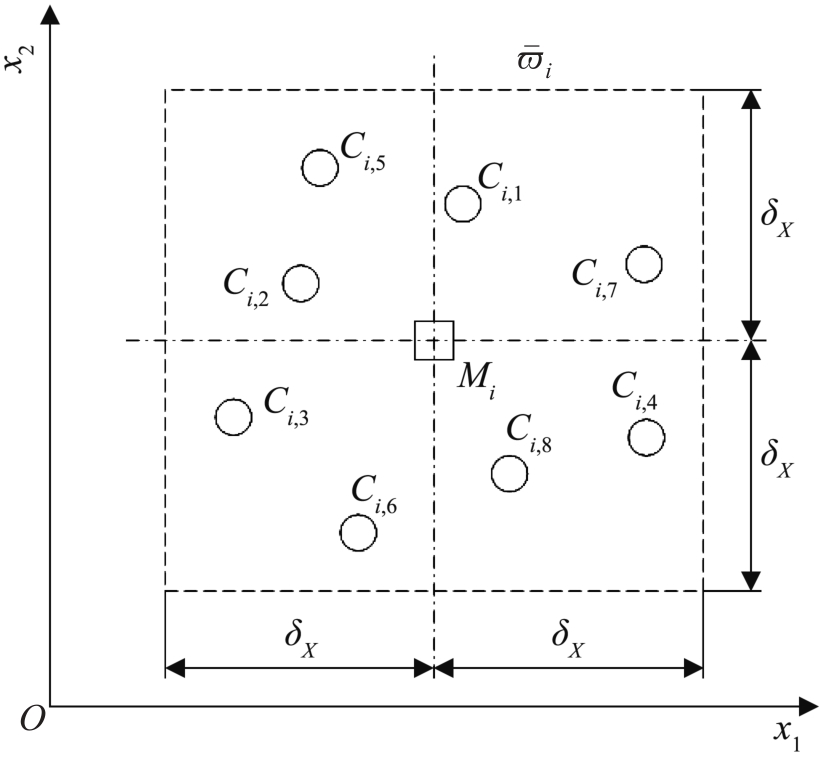
Fig. 2
Neighborhood Ωi of the robot si=Mi
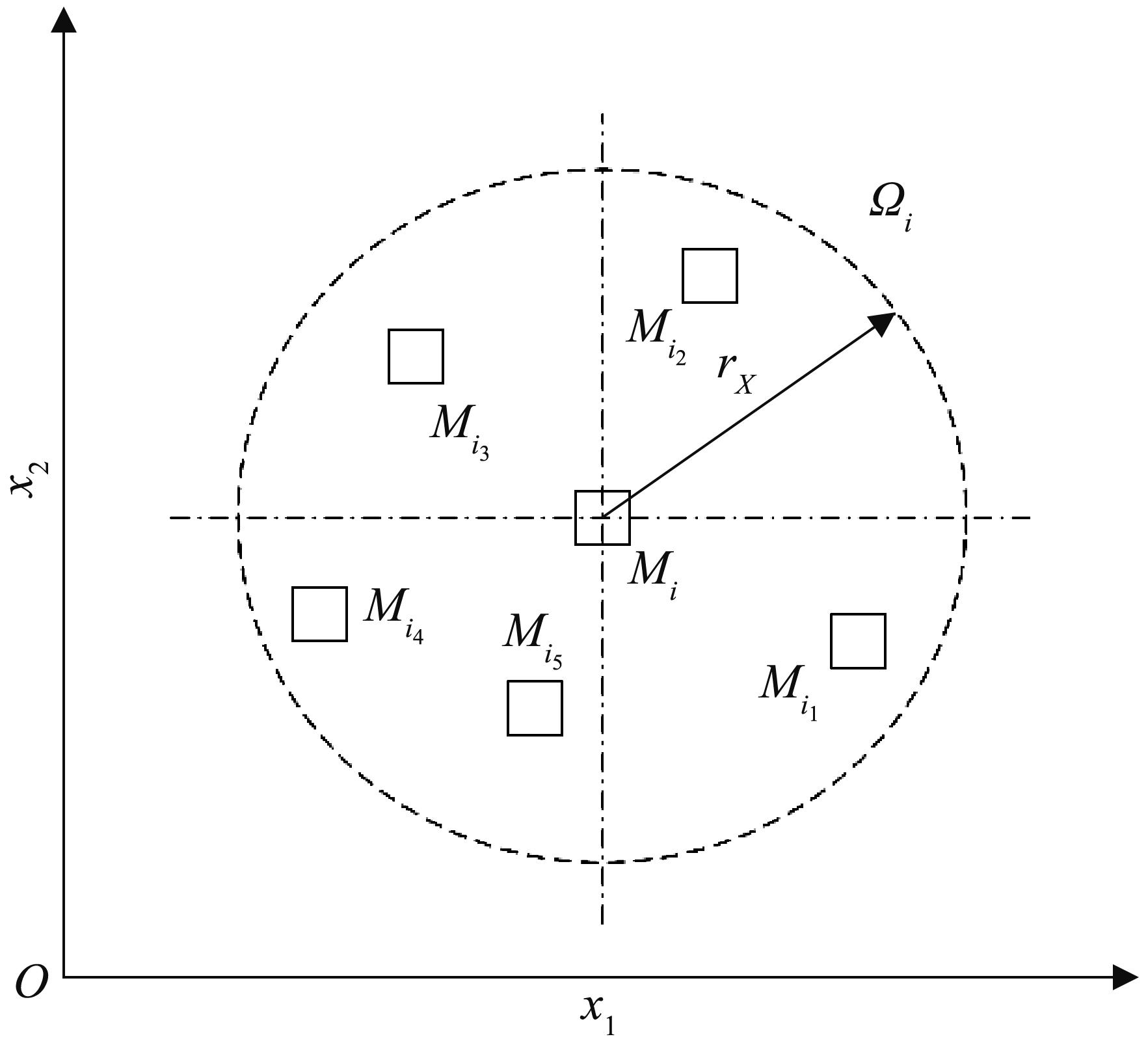
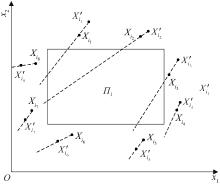
Fig. 3
Determination of search direction
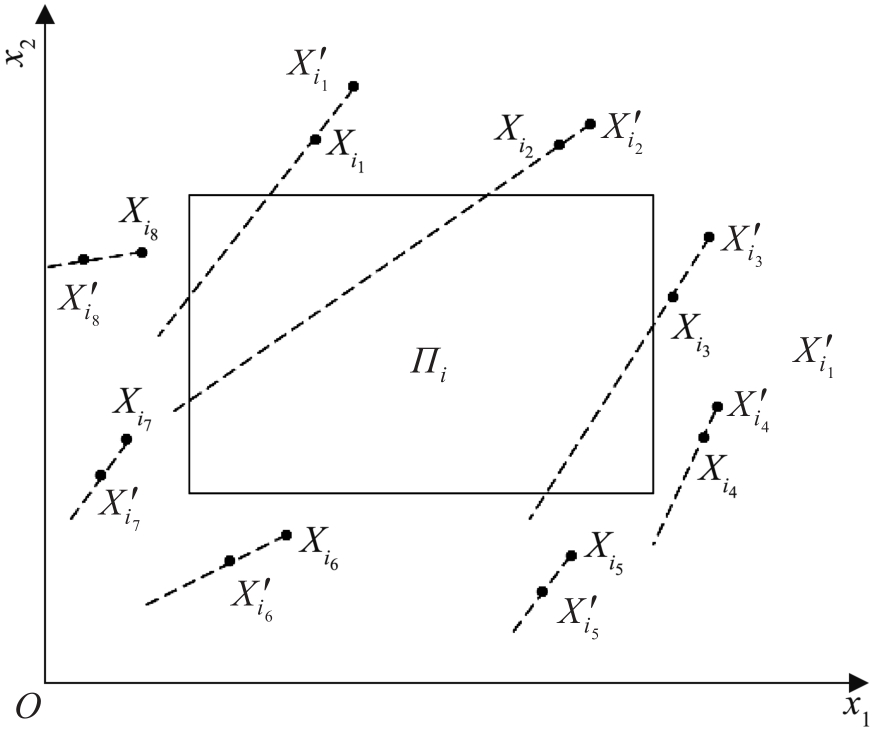

Fig. 4
Positioning probability of the Himmelblau function


Fig. 5
Positioning probability of the Rastrigin function
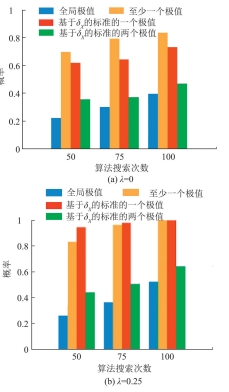
Table 1
Test function of CF1-CF6
| Name | Definition | Global Minimum X* |
|---|---|---|
| CF1 | ||
| CF2 | ||
| CF3 | ||
| CF4 | ||
| CF5 | ||
| CF6 |
Table 2
Min, median, mean and std of all recorded at the CF1-CF6 of other CSO
| CF1 | CF2 | CF3 | CF4 | CF5 | CF6 | ||
|---|---|---|---|---|---|---|---|
| 最小值 | CSO | 1.554 6×10-11 | 1.875 8 | 1.594 9×10-5 | 1.831 7×102 | 1.812 3×102 | 4.286 4×103 |
| SCSO | 1.498 8×10-28 | 1.373 3 | 6.113 5×10-5 | 1.622 8×102 | 1.850 3×102 | 1.357 0×104 | |
| MCSO | 1.182 7×10-150 | 7.539 5×10-15 | 1.600 5×10 | 1.780 9×10 | 9.323 3×10-33 | 7.476 5×102 | |
| 本文CSO | 0 | 4.340 9×10-16 | 1.817 7×10-4 | 8.138 7×10 | 9.403 3×10-33 | 3.137 3×10-1 | |
| 中间值 | CSO | 1.835 7×10-99 | 4.137 9 | 2.278 7×101 | 4.118 1×102 | 1.438 1×103 | 5.053 9×103 |
| SCSO | 4.518 4×10-27 | 3.437 5 | 1.961 1×101 | 4.337 2×102 | 5.941 6×103 | 1.467 0×104 | |
| MCSO | 1.348 5×10-14 | 1.475 5×10-14 | 2.919 5×101 | 3.870 3×101 | 9.323 3×10-33 | 7.057 9×103 | |
| 本文CSO | 0 | 1.501 5 | 2.081 6 | 1.323 2×102 | 1.110 7×10 | 2.102 9×103 | |
| 均值 | CSO | 1.402 4×10-91 | 5.336 4 | 5.639 8×101 | 4.971 0×102 | 2.130 0×103 | 5.264 9×103 |
| SCSO | 9.157 3×10-21 | 4.524 1 | 4.037 0×103 | 5.439 5×102 | 6.304 3×103 | 1.437 0×104 | |
| MCSO | 2.588 3×10-143 | 3.477 5 | 1.417 9×102 | 4.121 5×101 | 2.101 4×10-32 | 8.507 8×103 | |
| 本文CSO | 9.445 3×10-105 | 1.687 5 | 5.631 4 | 1.417 1×102 | 2.527 7×101 | 2.324 5×103 | |
| 标准差 | CSO | 1.028 5×10-90 | 4.135 4 | 1.221 8×102 | 2.710 3×102 | 2.154 9×103 | 8.475 2×102 |
| SCSO | 6.544 7×10-20 | 4.128 0 | 2.858 5×104 | 3.513 3×102 | 4.316 4×103 | 3.472 3×10-2 | |
| MCSO | 1.548 7×10-14 | 6.455 1 | 4.873 1×102 | 1.778 8×101 | 2.431 0×10-32 | 7.043 5×103 | |
| 本文CSO | 2.888 1×10-10 | 7.690 8×10-1 | 5.688 3 | 3.010 4×101 | 3.666 6×101 | 3.021 5×103 |
| 1 | 陈超, 李强, 闫青. 基于异质传感器信息融合的移动机器人同步定位与构图[J]. 科学技术与工程, 2018, 18(13): 86-91. |
| Chen Chao, Li Qiang, Yan Qing. Mobile Robot Simulataneous Localization and Mapping Based on Heterogeneous Sensor Information Fusion[J]. Science Technology and Engineering, 2018, 18(13): 86-91. | |
| 2 | 陈少斌, 蒋静坪. 运用异质传感器信息融合的移动机器人自定位[J]. 控制理论与应用, 2008, 25(5): 883-886. |
| Chen Shaobin, Jiang Jingping. Self-localization of the Mobile Robot Utilizing the Heterogeneous Sensor Information Fusion[J]. Control Theory & Applications, 2008, 25(5): 883-886. | |
| 3 | Guilherme Carlos R de Oliveira, Kevin B de Carvalho, Brandão Alexandre S. A Hybrid Path-planning Strategy for Mobile Robots with Limited Sensor Capabilities[J]. Sensors, 2019, 19(5): 1049. |
| 4 | Lin H Y, Huang Yichun. Collaborative Complete Coverage and Path Planning for Multi-robot Exploration[J]. Sensors, 2021, 21(11): 3709. |
| 5 | Wei Yongyong, Zheng Rong. Multi-robot Path Planning for Mobile Sensing Through Deep Reinforcement Learning[C]//IEEE INFOCOM 2021-IEEE Conference on Computer Communications. Piscataway: IEEE, 2021: 1-10. |
| 6 | Brian Lee K M, Kong F, Cannizzaro R, et al. An Upper Confidence Bound for Simultaneous Exploration and Exploitation in Heterogeneous Multi-robot Systems[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 8685-8691. |
| 7 | Bae J, Park M. A Heuristic for Efficient Coordination of Multiple Heterogeneous Mobile Robots Considering Workload Balance[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 4064-4070. |
| 8 | Patil A, Bae J, Park M. An Algorithm for Task Allocation and Planning for a Heterogeneous Multi-robot System to Minimize the Last Task Completion Time[J]. Sensors, 2022, 22(15): 5637. |
| 9 | Wu Guohua, Mallipeddi Rammohan, Suganthan P N. Ensemble Strategies for Population-based Optimization Algorithms-A Survey[J]. Swarm and Evolutionary Computation, 2018, 44: 695-711. |
| 10 | Zedadra Ouarda, Guerrieri Antonio, Jouandeau Nicolas, et al. Swarm Intelligence-based Algorithms Within IoT-based Systems: A Review[J]. Journal of Parallel and Distributed Computing, 2018, 122: 173-187. |
| 11 | Fister Iztok, Iglesias Andres, Galvez Akemi, et al. Novelty Search for Global Optimization[J]. Applied Mathematics and Computation, 2019, 347: 865-881. |
| 12 | Mirjalili S, Lewis A. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| 13 | Agirbas Asli. Façade Form-finding with Swarm Intelligence[J]. Automation in Construction, 2019, 99: 140-151. |
| 14 | Singh Prabhat R, Mohamed Abd Elaziz, Xiong Shengwu. Modified Spider Monkey Optimization Based on Nelder-mead Method for Global Optimization[J]. Expert Systems with Applications, 2018, 110: 264-289. |
| 15 | Singh Kavita, Sundar Shyam. Artifical Bee Colony Algorithm Using Problem-specific Neighborhood Strategies for the Tree T-spanner Problem[J]. Applied Soft Computing, 2018, 62: 110-118. |
| 16 | Krishnanand K N, Ghose D. Detection of Multiple Source Locations Using a Glowworm Metaphor with Applications to Collective Robotics[C]//Proceedings 2005 IEEE Swarm Intelligence Symposium. Piscataway: IEEE, 2005: 84-91. |
| 17 | 李国亮. 狼群算法的研究与应用[D]. 南昌: 东华理工大学, 2016. |
| Li Guoliang. Research and Application of Wolf Colony Algorithm[D]. Nanchang: East China University of Technology, 2016. | |
| 18 | Vaishak N L, Shilpa B. A Review of Swarm Robotics: A Different Approach to Service Robot[J]. International Journal of Science, Engineering and Technology Research, 2013, 2(8): 1560-1565. |
| 19 | Orouskhani Meysam, Orouskhani Yasin, Mansouri Mohammad, et al. A Novel Cat Swarm Optimization Algorithm for Unconstrained Optimization Problems[J]. International Journal of Information Technology and Computer Science, 2013, 5(11): 32-41. |
| 20 | Tsai P W, Pan J S, Chen S M, et al. Parallel Cat Swarm Optimization[C]//2008 International Conference on Machine Learning and Cybernetics. Piscataway: IEEE, 2008: 3328-3333. |
| 21 | 李昂, 付敬奇, 沈华明, 等. 基于模糊聚类和猫群算法的室内定位算法[J]. 仪器仪表学报, 2020, 41(1): 185-194. |
| Li Ang, Fu Jingqi, Shen Huaming, et al. Indoor Positioning Algorithm Based on Fuzzy Clustering and Cat Swarm Optimization[J]. Chinese Journal of Scientific Instrument, 2020, 41(1): 185-194. | |
| 22 | Ali Hussein Khala, El-Bakry Hazem M, Sahar Fawzy Sabbeh. University Courses Scheduling Using Cat Swarm Optimization Algorithm[J]. International Journal of Advanced Research in Computer Science & Technology, 2016, 4(1): 18-23. |
| 23 | Orouskhani Maysam, Teshnehlab Mohammad, Mohammad Ali Nekoui. Integration of Cat Swarm Optimization and Borda Ranking Method for Solving Dynamic Multi-objective Problems[J]. International Journal of Computational Intelligence and Applications, 2016, 15(3): 1650014. |
| 24 | Pettersson L M, Durand D, Johannessen O M, et al. Monitoring of Harmful Algal Blooms: [R]. London: Praxis Publishing, 2012. |
| 25 | Chu Shuchuan, Tsai P W, Pan J S. Cat Swarm Optimization[C]//PRICAI 2006: Trends in Artificial Intelligence. Berlin: Springer Berlin Heidelberg, 2006: 854-858. |
| 26 | Seyyedabbasi Amir, Kiani Farzad. Sand Cat Swarm Optimization: A Nature-inspired Algorithm to Solve Global Optimization Problems[J]. Engineering with Computers, 2023, 39(4): 2627-2651. |
| 27 | Guo Lei, Meng Zhuo, Sun Yize, et al. A Modified Cat Swarm Optimization Based Maximum Power Point Tracking Method for Photovoltaic System Under Partially Shaded Condition[J]. Energy, 2018, 144: 501-514. |
| [1] | Zhang Xin, Zhang Ping, Zhang Chen, Liu Wei, Han Boyang. Research on Calculation Model of Excavation Resistance Under Heterogeneous Soil Conditions [J]. Journal of System Simulation, 2026, 38(5): 1320-1332. |
| [2] | Liu Congping, Song Wei, Fang Jian, Liu Fei. Research on High-performance Optimization Methods for FastDDS in Heterogeneous Real-time Simulation [J]. Journal of System Simulation, 2025, 37(7): 1865-1878. |
| [3] | Hu Tianxiang, Ye Hui, Yang Xiaofei. Construction of a Digital Twin-based Ship Manufacturing Workshop Monitoring System [J]. Journal of System Simulation, 2025, 37(2): 517-528. |
| [4] | Zhang Zhili, Liu Jin, Zhou Zhaofa, Liang Zhe, Zhang Yunhao. Research on Temperature Compensation Technology of Fiber Optic Gyroscope based on ISCSO-BP Neural Network Model [J]. Journal of System Simulation, 2025, 37(11): 2904-2917. |
| [5] | Xuan Hua, Lü Lin, Li Bing. Distributed Heterogeneous Hybrid Flow-shop Scheduling Considering Combined Buffer [J]. Journal of System Simulation, 2025, 37(10): 2672-2686. |
| [6] | Lu Yuanjie, Long Shanshan, Zhao Hang, Feng Guoxu, Zhao Xiaojia. Effectiveness Evaluation of Heterogeneous UAV Swarms Based on a Hybrid Model [J]. Journal of System Simulation, 2024, 36(3): 700-712. |
| [7] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [8] | Feng Chen, You Xiaoming, Liu Sheng. Heterogeneous Multi-ant Colony Algorithm Combining Competitive Interaction Strategy and Eliminating-reconstructing Mechanism [J]. Journal of System Simulation, 2024, 36(1): 232-248. |
| [9] | Naiyang Xue, Dan Ding, Yutong Jia, Zhiqiang Wang, Yuan Liu. DQN-based Joint Scheduling Method of Heterogeneous TT&C Resources [J]. Journal of System Simulation, 2023, 35(2): 423-434. |
| [10] | Weiquan Wang, Ding Ding, Shuyan Cao. Hybrid Variable Neighborhood Search algorithm for the Multi-trip and Heterogeneous-fleet Electric Vehicle Routing Problem [J]. Journal of System Simulation, 2022, 34(4): 910-919. |
| [11] | Weiquan Wang, Ding Ding, Linsha Yan. Path-Based Model for the Heterogeneous-Fleet Electric Vehicle Routing Problem with Partial Linear Recharging [J]. Journal of System Simulation, 2022, 34(3): 614-623. |
| [12] | Guoqiang Shi, Zewei Liu, Tingyu Lin, Zhao Xu, Xingyi Yang, Liqin Guo, Zhengxuan Jia. Open Cloud Architecture Design for Complex Product Modeling and Simulation System [J]. Journal of System Simulation, 2022, 34(3): 442-451. |
| [13] | Fuzhen Zhang, Yaoqin Zhu. Task Allocation Method for Multi-UAV Cooperative Reconnaissance in Complex Environment [J]. Journal of System Simulation, 2022, 34(10): 2293-2302. |
| [14] | Qi Xiaolong, Yang Xuguang. Time-varying Output Formation Tracking Control of Discrete-time Heterogeneous Multi-agent Systems [J]. Journal of System Simulation, 2022, 34(1): 36-44. |
| [15] | Wang Zhendong, Xie Huamao, Hu Zhongdong, Li Dahai, Wang Junling. Improved Flower Pollination Algorithm Based Deployment Optimization of Wireless Sensor Network [J]. Journal of System Simulation, 2021, 33(3): 645-656. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
