

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (8): 1776-1787.doi: 10.16182/j.issn1004731x.joss.22-0454
•
Jianwei Peng1,2( ), Zhelin Liao1,3, Hanchen Yao1,2, Zhiyu Wan1,4, Liqi Zhu1, Houde Dai1,2()
), Zhelin Liao1,3, Hanchen Yao1,2, Zhiyu Wan1,4, Liqi Zhu1, Houde Dai1,2()
Received:2022-05-05
Revised:2022-06-13
Online:2023-08-25
Published:2023-08-15
Jianwei Peng, Zhelin Liao, Hanchen Yao, Zhiyu Wan, Liqi Zhu, Houde Dai. A Compliant Robot Control Based on Extended Social-force Model for Human-following and Obstacle Avoidance[J]. Journal of System Simulation, 2023, 35(8): 1776-1787.
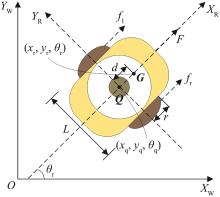
Fig. 1
Model schematic of a two-wheel differential mobile robot
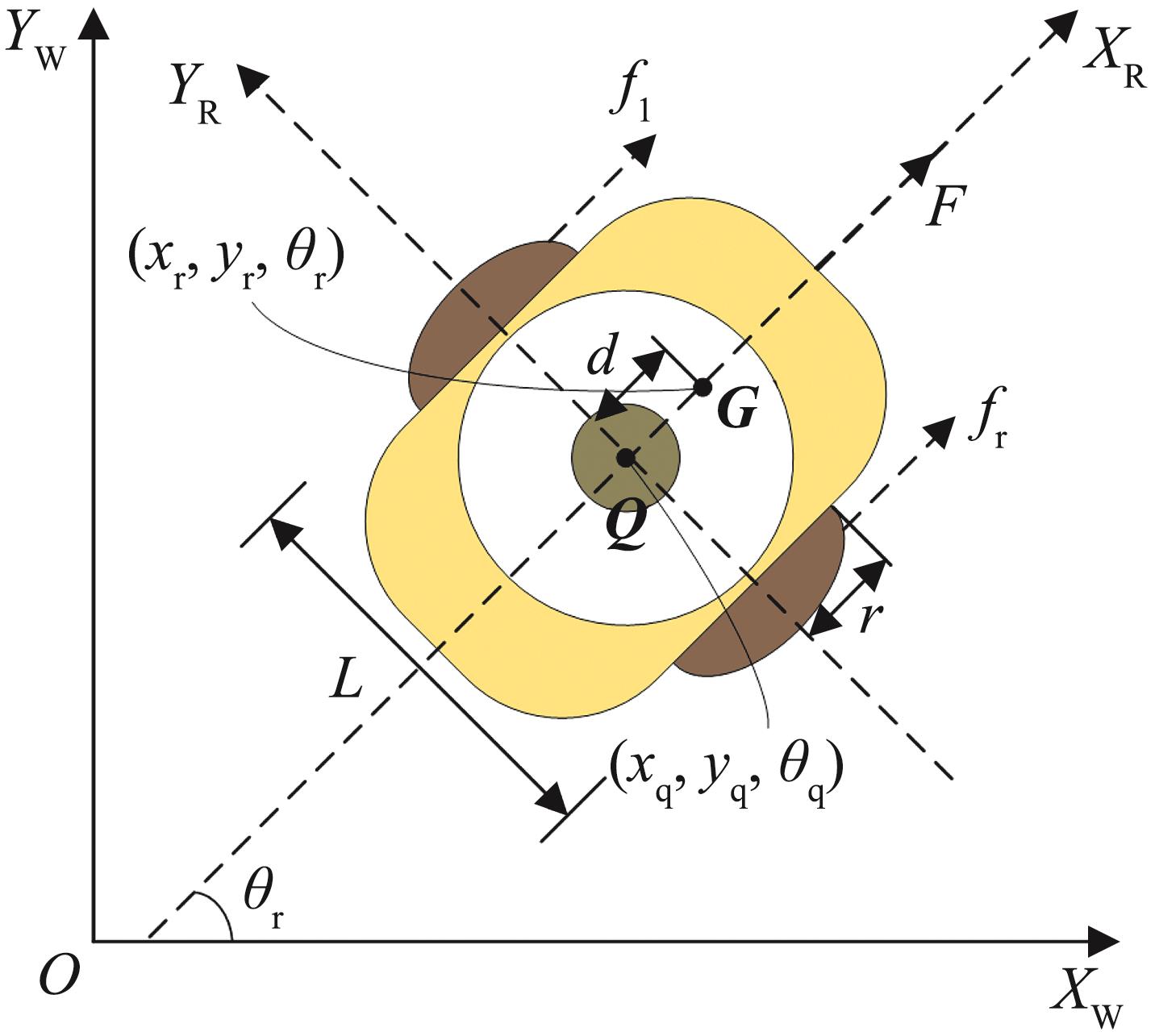
Fig. 2
Model schematic of human-following robot in social environment
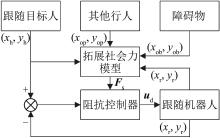
Fig. 3
Human-friendly compliant human-following and obstacle avoidance control strategy
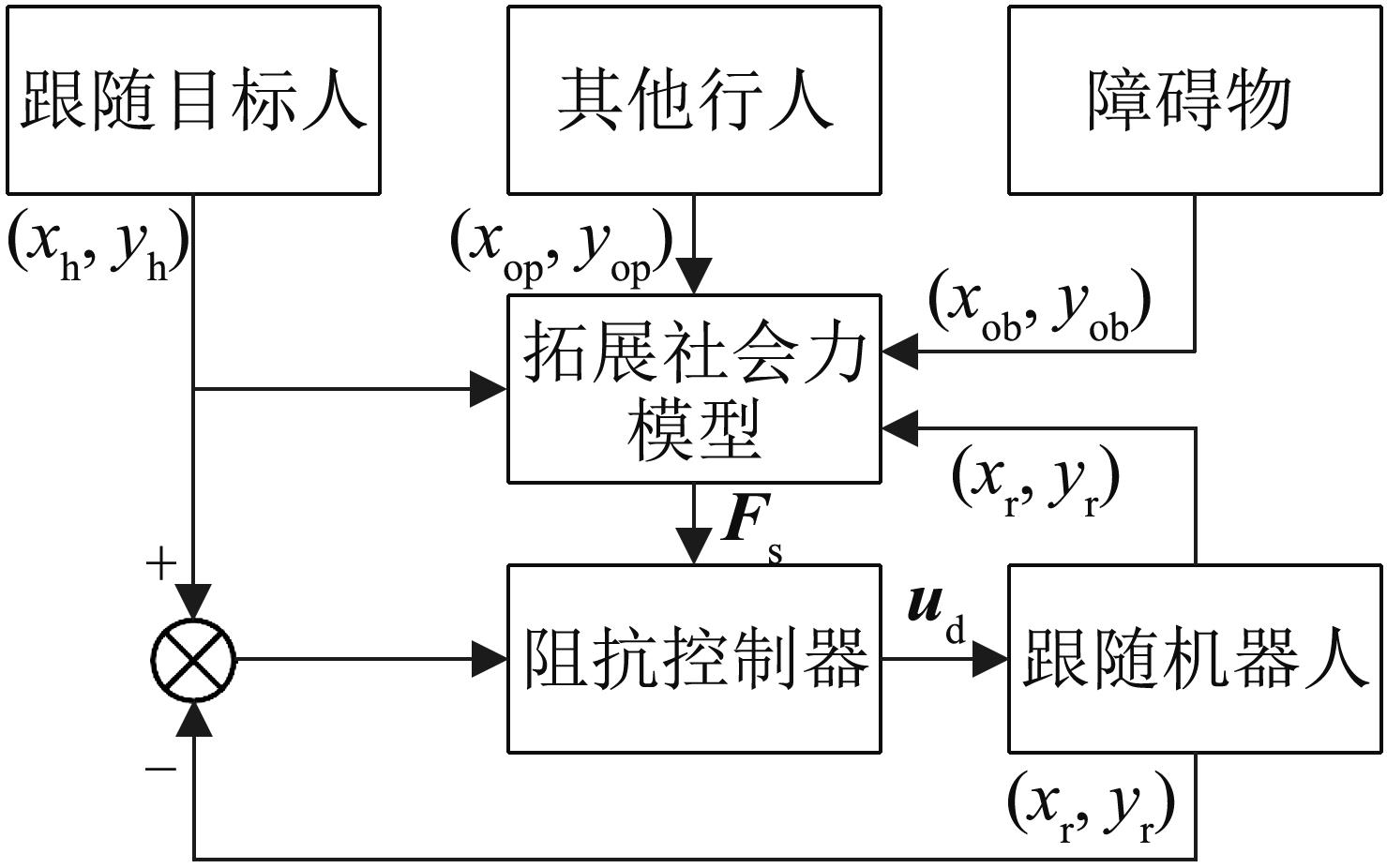
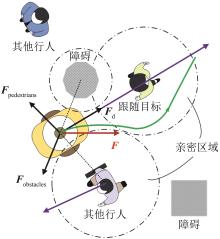
Fig. 4
Schematic of extended social-force model
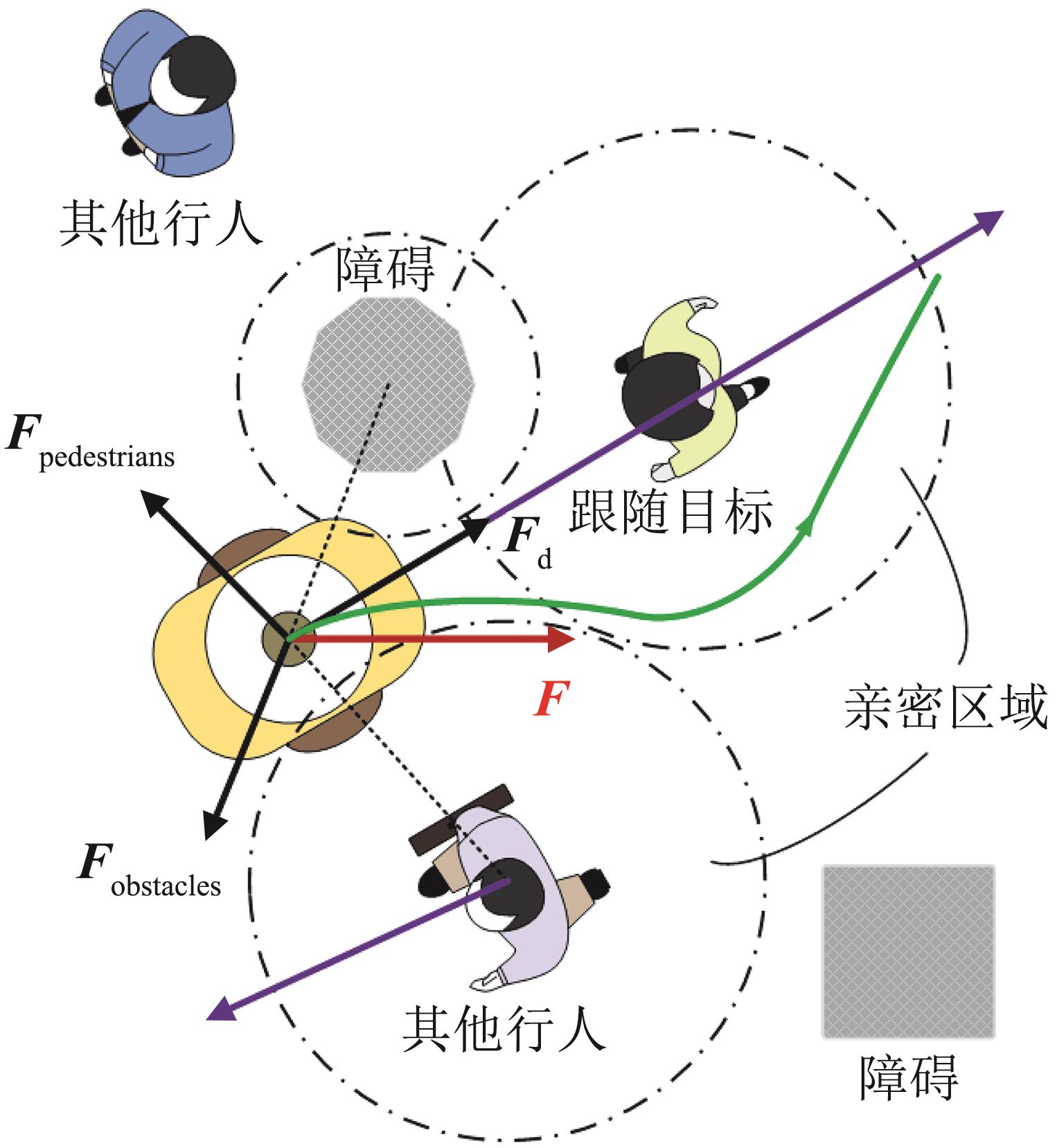
Table 1
Human-following robot parameter settings
| 主要参数 | 量值 |
|---|---|
| 机器人质量 /kg | 40 |
| 驱动轮半径 /m | 0.216 |
| 驱动轮轮轴距 /m | 0.525 |
| 形心到轮轴中心的距离 /m | 0.04 |
| 动力学模型参数 | 0.003 |
| 动力学模型参数 | 0.1 |
| 动力学模型参数 | 0.1 |
| 动力学模型参数 | 0.1 |
Table 2
Simulation parameter settings
| 主要参数 | 量值 |
|---|---|
| 目标人私人区域半径 /m | 1.5 |
| 目标人社交区域半径 /m | 3.66 |
| 其他行人的私人区域半径 /m | 1.5 |
| 障碍物的膨胀范围 /m | 1 |
| 跟随距离 /m | 2 |
| 惯性系数 | 10 |
| 阻尼系数 | 500 |
| 弹性系数 | 7 200 |
| 拓展社会力强度系数 | 10 000 |
| 拓展社会力方程阶数 | 2 |

Fig. 5
Straight trajectory experiment without obstacles for human-following robot
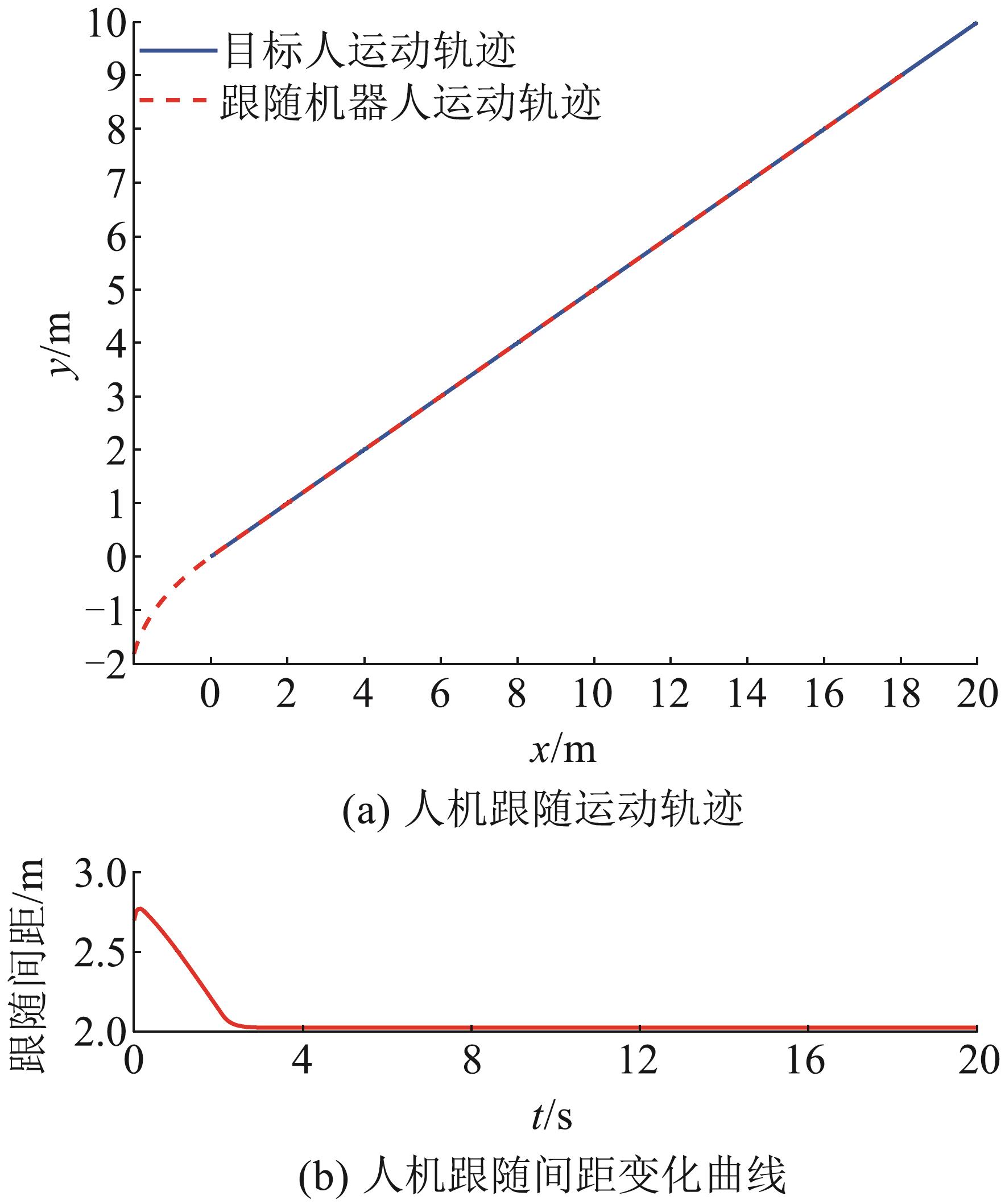

Fig. 6
Circular trajectory experiment without obstacles for human-following robot
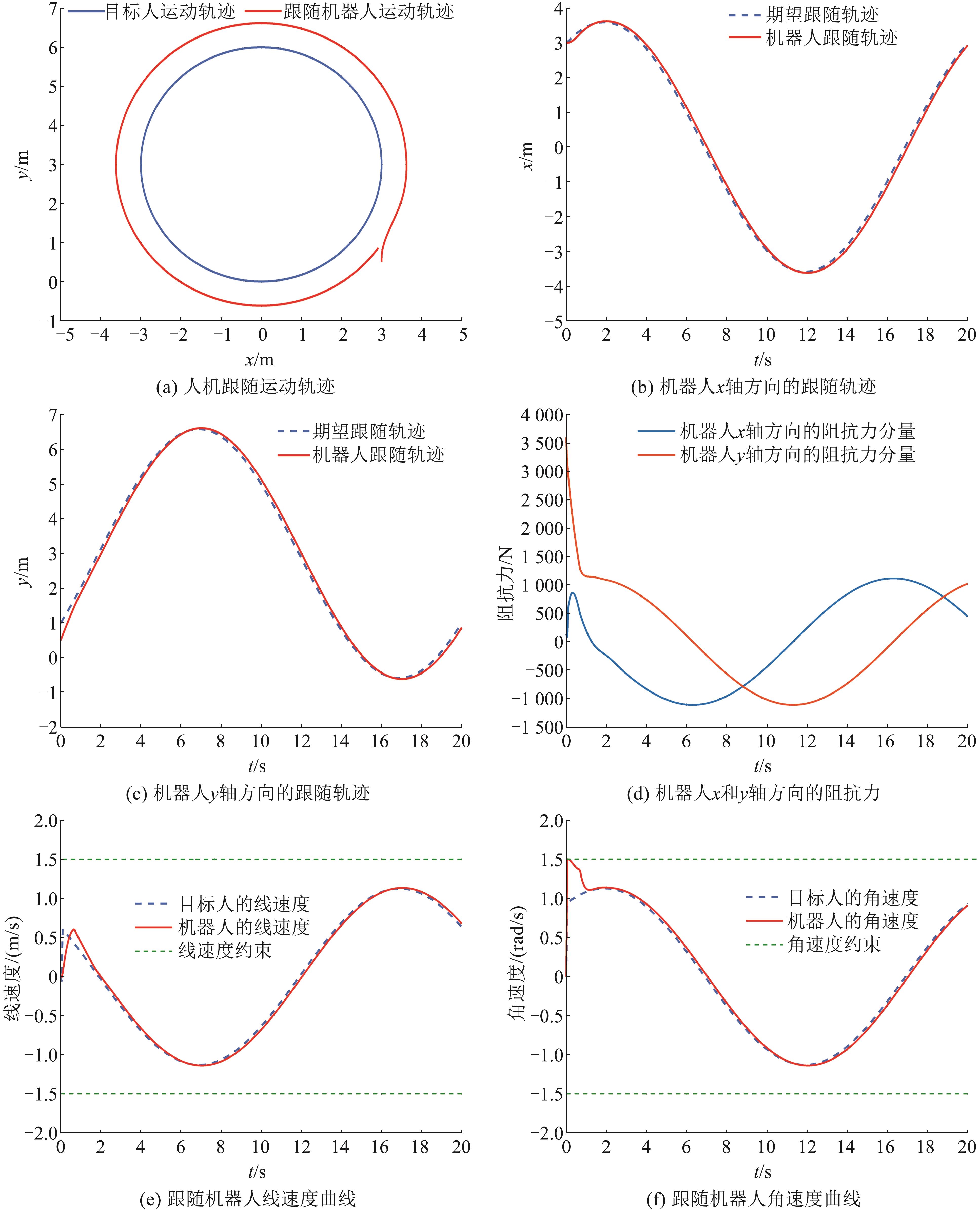

Fig. 7
Circular trajectory experiment with obstacles
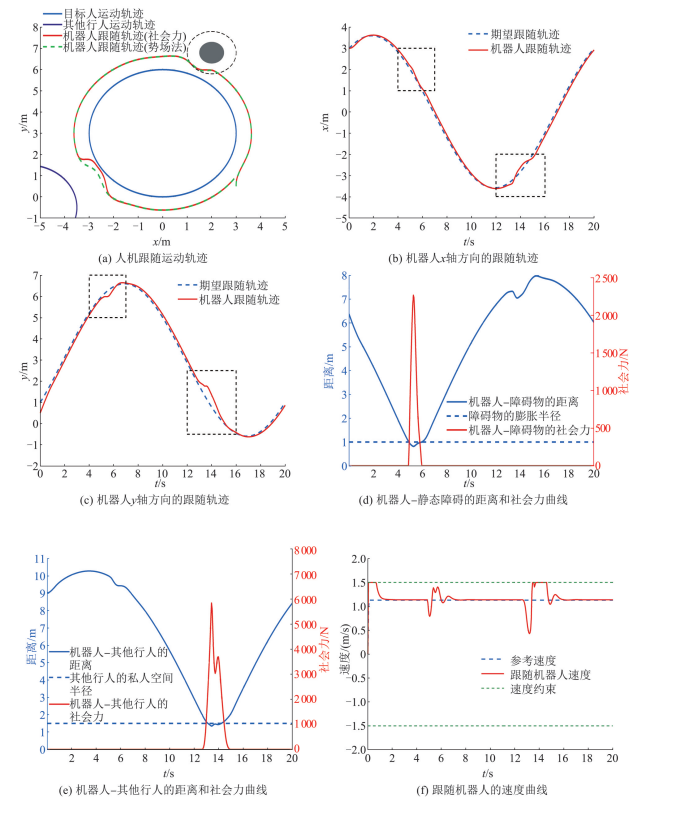
Table 3
Experimental parameters of circular trajectory with obstacles
| 类别 | 安全区时间/s | 最小间距/m |
|---|---|---|
| 机器人-静态障碍物 | 1.05 | 0.818 |
| 机器人-动态障碍物 | 1.15 | 1.345 |
| 机器人-被跟随目标 | 0 | 2.015 |
| 人工势场(静态障碍物) | 1.25 | 0.811 |
| 人工势场(动态障碍物) | 2.70 | 1.152 |
| 1 |
何玉庆, 赵忆文, 韩建达, 等. 与人共融-机器人技术发展的新趋势[J]. 机器人产业, 2015(5): 74-80.
|
|
|
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
李晓天. 一种跟随式助老机器人的设计与研究[J]. 电子世界, 2021(16): 104-106.
|
|
|
|
| 6 |
|
| 7 |
胡荣, 章小宝, 谭菊华. 基于深度学习的智能物流分拣跟随机器人的设计与研究[J]. 中国储运, 2022(2): 141-142.
|
|
|
|
| 8 |
谢嘉, 桑成松, 王世明, 等. 智能跟随移动机器人的研究与应用前景综述[J]. 制造业自动化, 2020, 42(10): 49-55.
|
|
|
|
| 9 |
孙月, 刘景泰. 基于RGB-D传感器的室内服务机器人舒适跟随方法[J]. 机器人, 2019, 41(6): 823-833.
|
|
|
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
孙立香, 孙晓娴, 刘成菊, 等. 人群环境中基于深度强化学习的移动机器人避障算法[J]. 信息与控制, 2022, 51(1): 107-118.
|
|
|
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
陈靓, 黄玉平, 陶云飞, 等. 基于阻抗模型的下肢康复机器人交互控制系统设计[J]. 计算机测量与控制, 2020, 28(4): 116-120.
|
|
|
|
| 19 |
|
| 20 |
姚瀚晨, 彭建伟, 戴厚德, 等. 基于改进弹簧模型的移动机器人柔顺跟随行人方法[J]. 机器人, 2021, 43(6): 684-693.
|
|
|
|
| 21 |
|
| 22 |
Celso De La Cruz,
|
| 23 |
陈明, 甘亚辉, 戴先中, 等. 基于阻抗控制的工业机器人轨迹跟踪系统设计[C]//第十二届中国智能机器人大会论文集. 哈尔滨: 中国人工智能学会, 2017: 324-331.
|
|
|
|
| 24 |
|
| 25 |
|
| 26 |
|
| [1] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [2] | Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(3): 595-606. |
| [3] | Ji Peng, Zhang Xinyuan, Gao Shuaixuan, Wei Shuorang. Path Planning Based on Improved A* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(9): 2171-2180. |
| [4] | Huo Hanlin, Zou Xiangjun, Chen Yan, Zhou Xinzhao, Chen Mingyou, Li Chengen, Pan Yaoqiang, Tang Yunchao. Visual Robot Obstacle Avoidance Planning and Simulation Using Mapped Point Clouds [J]. Journal of System Simulation, 2024, 36(9): 2149-2158. |
| [5] | Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(8): 1843-1853. |
| [6] | Liu Zesen, Bi Sheng, Guo Chuanhong, Wang Yankui, Dong Min. Deep Learning Based Local Path Planning Method for Moving Robots [J]. Journal of System Simulation, 2024, 36(5): 1199-1210. |
| [7] | Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(4): 957-968. |
| [8] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [9] | Ai Gaohang, Li Chuntao. UAV Swarm Obstacle Avoidance Based on Visual Filed and Adaptive Radius [J]. Journal of System Simulation, 2024, 36(12): 2945-2959. |
| [10] | Ma Zongfang, Zhang Linxuan, Song Lin, Wang Jia. Garage AGV Path Planning and Simulation Based on Improved DWA [J]. Journal of System Simulation, 2024, 36(10): 2265-2276. |
| [11] | Tang Yunchao, Qi Shaojun, Zhu Lixue, Zhuo Xianrong, Zhang Yunqi, Meng Fan. Obstacle Avoidance Motion in Mobile Robotics [J]. Journal of System Simulation, 2024, 36(1): 1-26. |
| [12] | Junqiang Lin, Hongjun Wang, Xiangjun Zou, Po Zhang, Chengen Li, Yipeng Zhou, Shujie Yao. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO [J]. Journal of System Simulation, 2023, 35(8): 1692-1704. |
| [13] | Junxiao Xue, Xiangyan Kong, Bowei Dong, Hao Tao, Haiyang Guan, Lei Shi, Mingliang Xu. Obstacle Avoidance and Simulation of Carrier-Based Aircraft on the Deck of Aircraft Carrier [J]. Journal of System Simulation, 2023, 35(3): 592-603. |
| [14] | Teng Li, Peipei Ding, Jinfang Liu. Multi-Stage Multi-AGV Path Planning with Walk under Shelves for Robotic Mobile Fulfillment Systems [J]. Journal of System Simulation, 2022, 34(7): 1512-1523. |
| [15] | Chikun Gong, Xunwei Wu, Lipeng Yuan. Control of Quadruped Robot Based on Impedance and Virtual Model [J]. Journal of System Simulation, 2022, 34(10): 2152-2161. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
