

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (1): 1-26.doi: 10.16182/j.issn1004731x.joss.23-1297E
• Expert Manuscript • Next Articles
Tang Yunchao1,2( ), Qi Shaojun2, Zhu Lixue2, Zhuo Xianrong2, Zhang Yunqi2, Meng Fan2
), Qi Shaojun2, Zhu Lixue2, Zhuo Xianrong2, Zhang Yunqi2, Meng Fan2
Received:2023-10-27
Revised:2023-12-18
Online:2024-01-20
Published:2024-01-19
About author:Tang Yunchao (1983-), male, professor, doctor, research areas: Computer vision, Field robotics. E-mail: ryan.twain@gmail.comSupported by:CLC Number:
Tang Yunchao, Qi Shaojun, Zhu Lixue, Zhuo Xianrong, Zhang Yunqi, Meng Fan. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26.

Fig. 1
Path planning algorithm classification
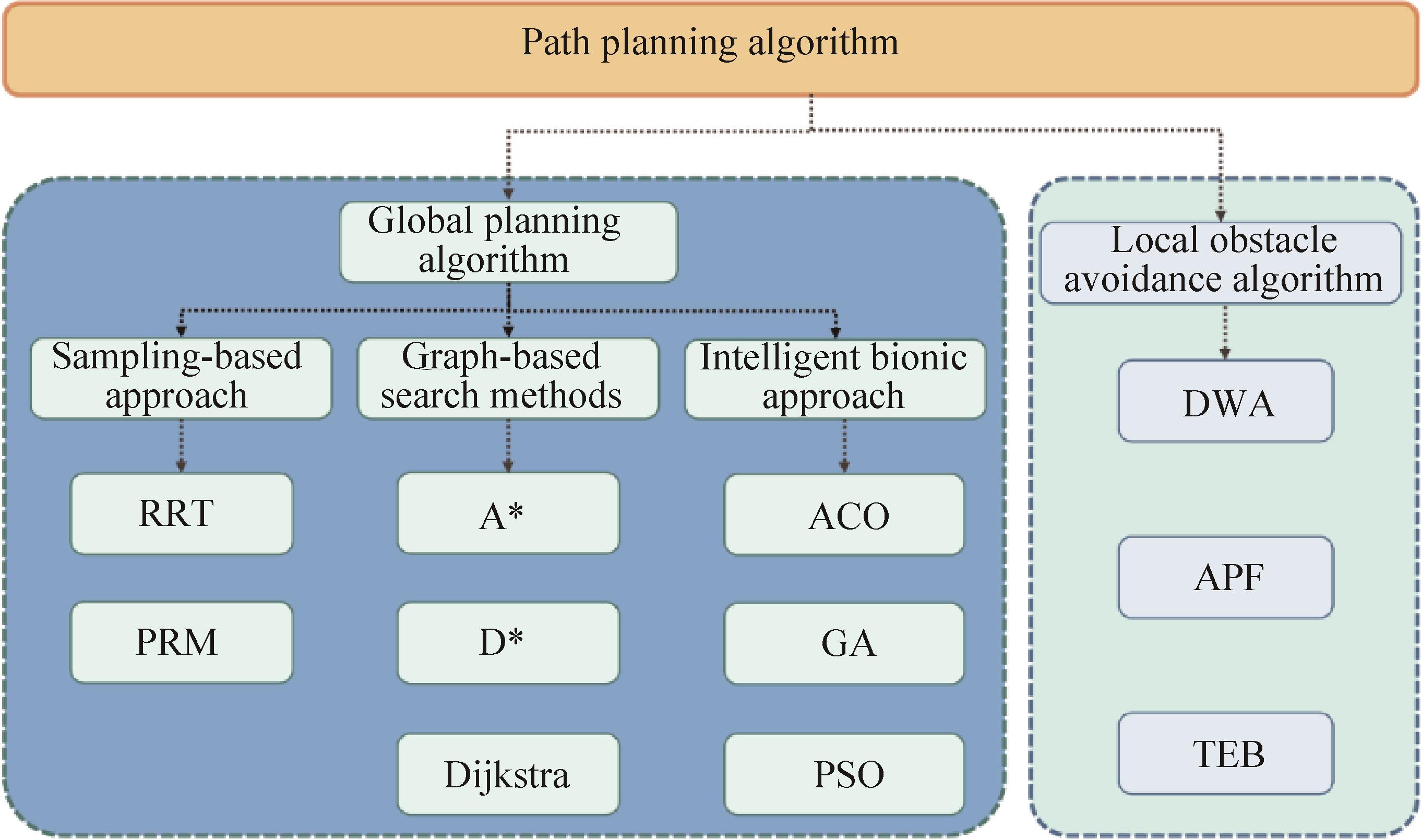

Fig. 2
(a) The two-wheeled firefighting robot; (b) when the Goal-bias RRT algorithm encounters the sag trap, there are more search nodes; (c) when the bidirectional RRT algorithm meets the depression trap, there are fewer search nodes
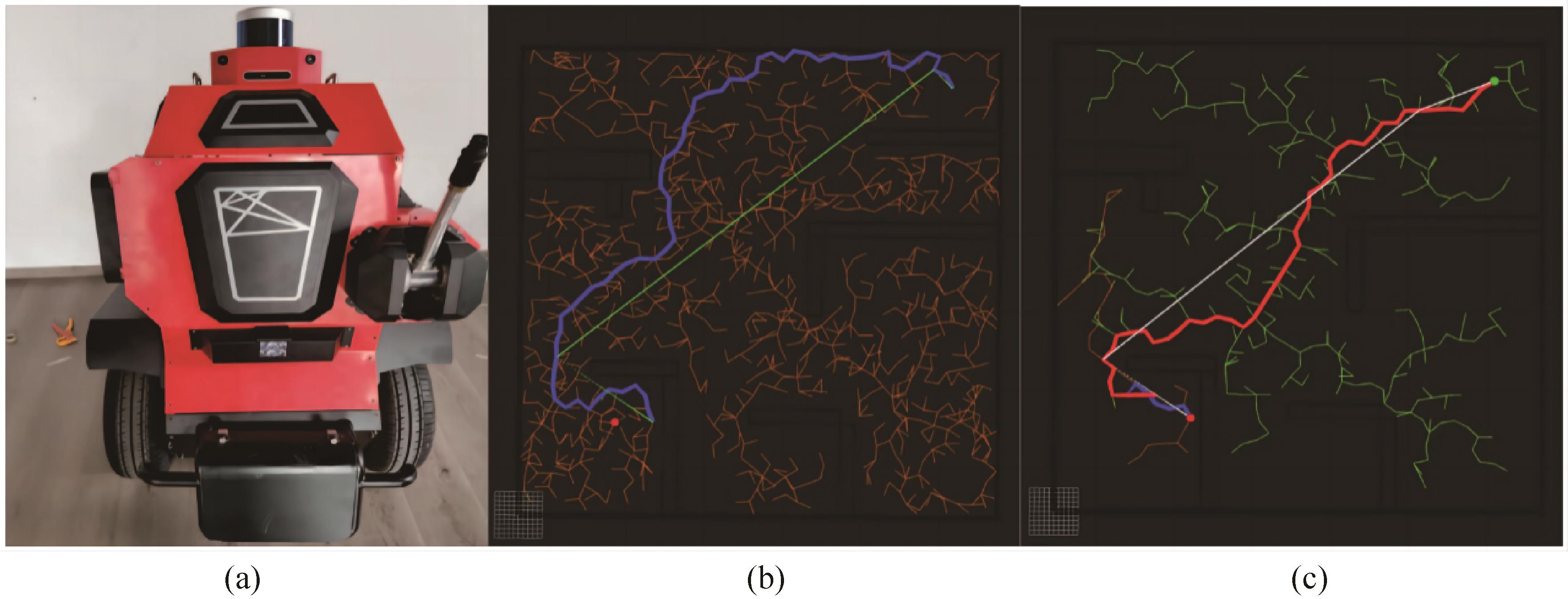
Fig. 3
RRT algorithm and its variant improvement strategies
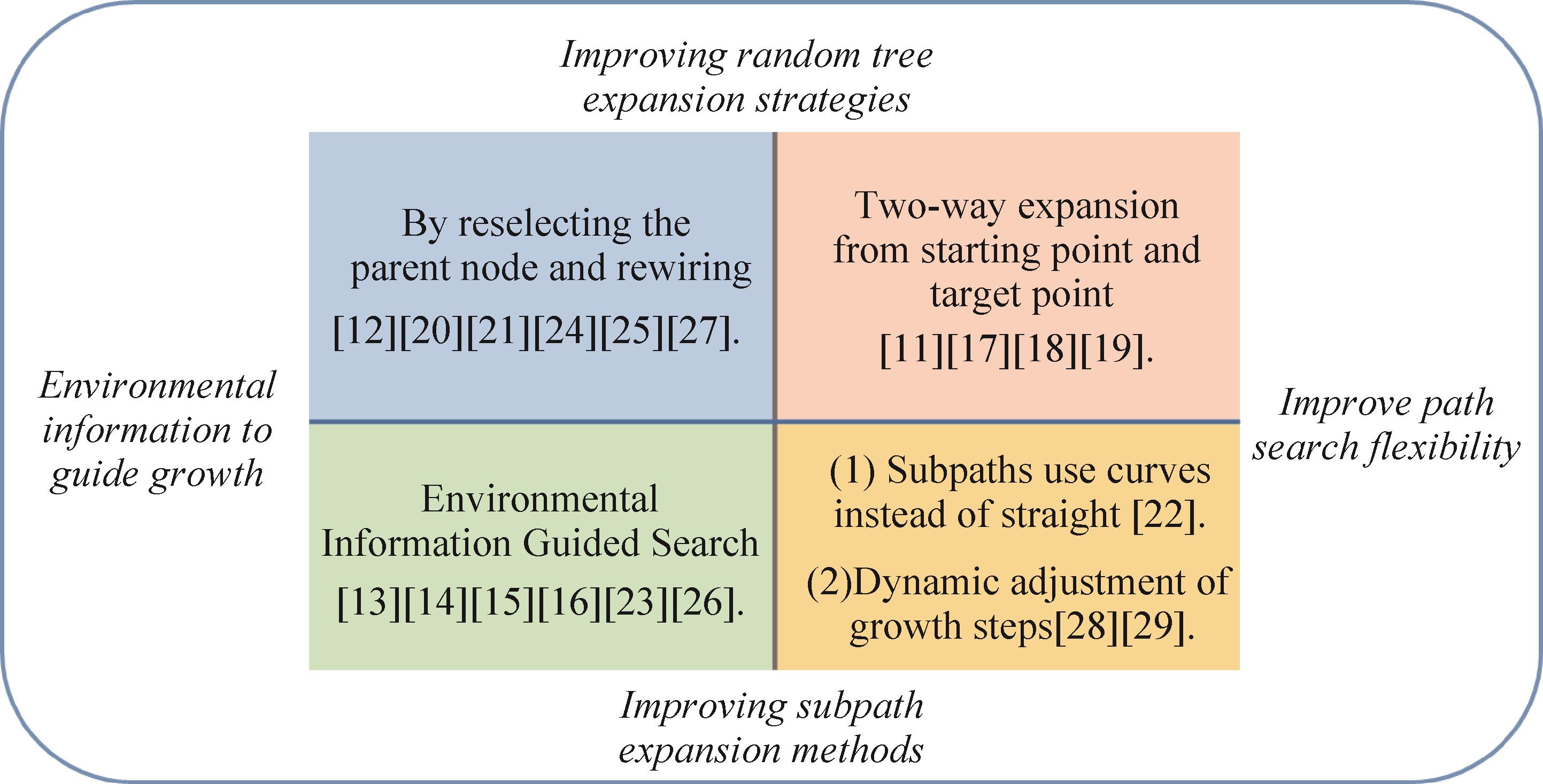
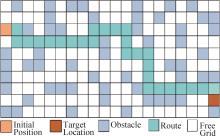
Fig. 4
Raster map
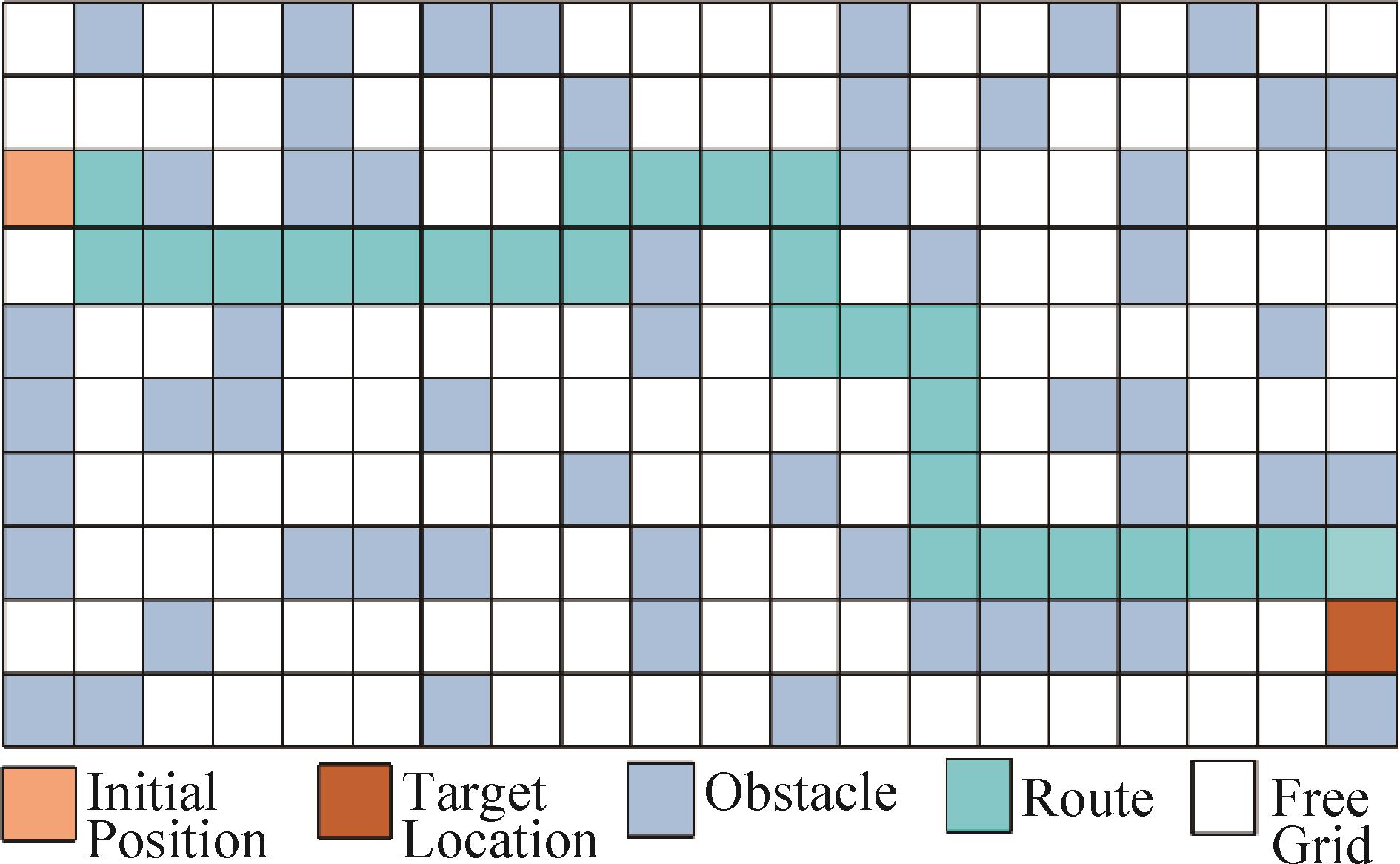
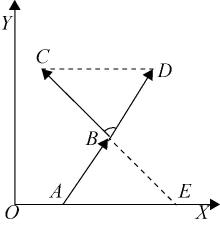
Fig. 5
Vector triangle path
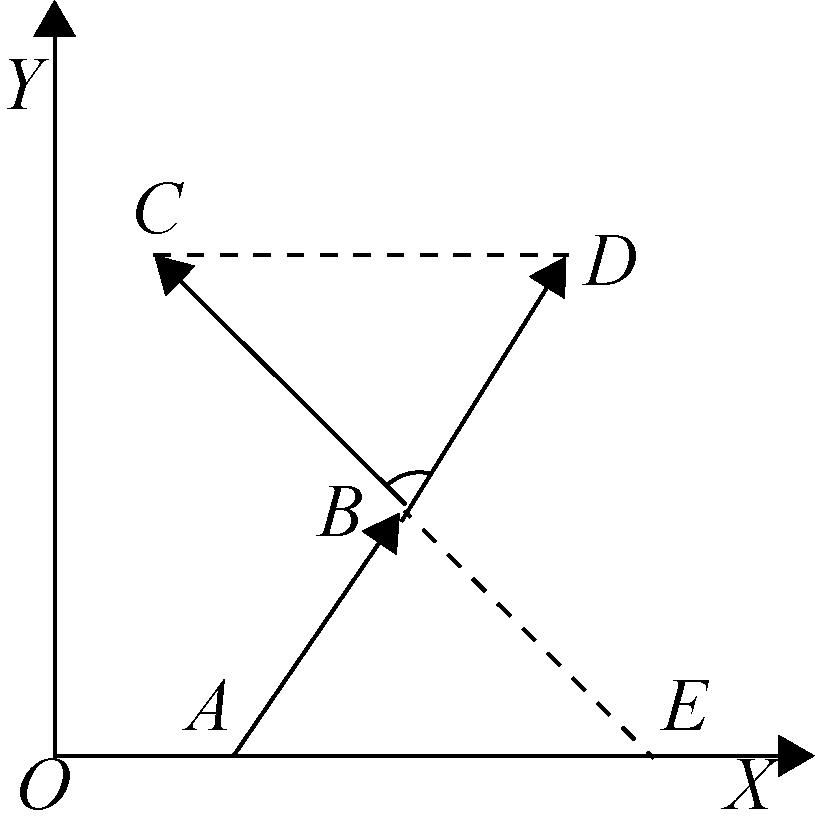
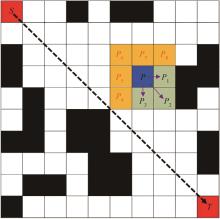
Fig. 6
Heuristic mechanism based on orientation information
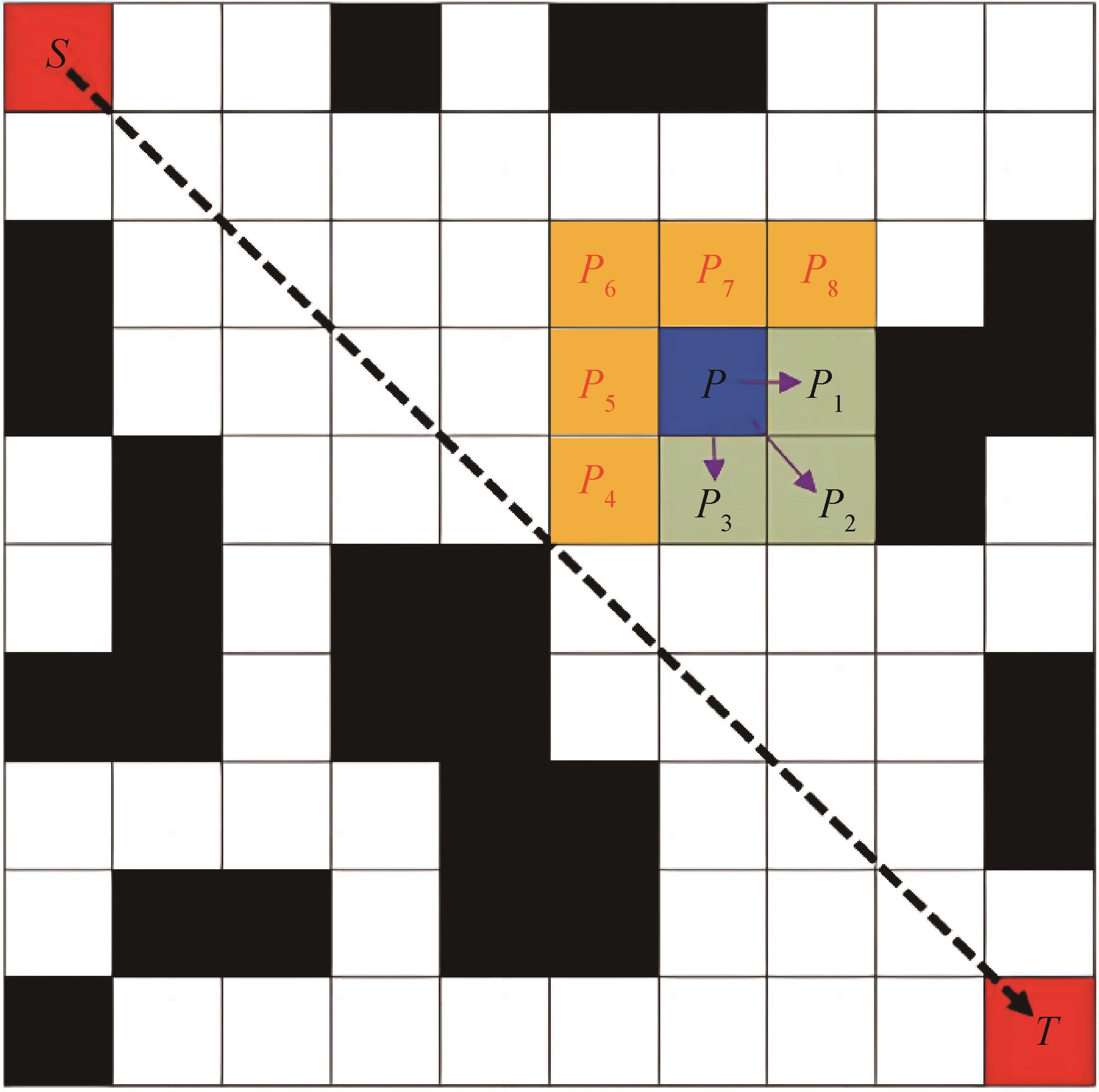

Fig. 7
Mobile robots for airport navigation


Fig. 8
Different improvement strategies for DWA algorithm
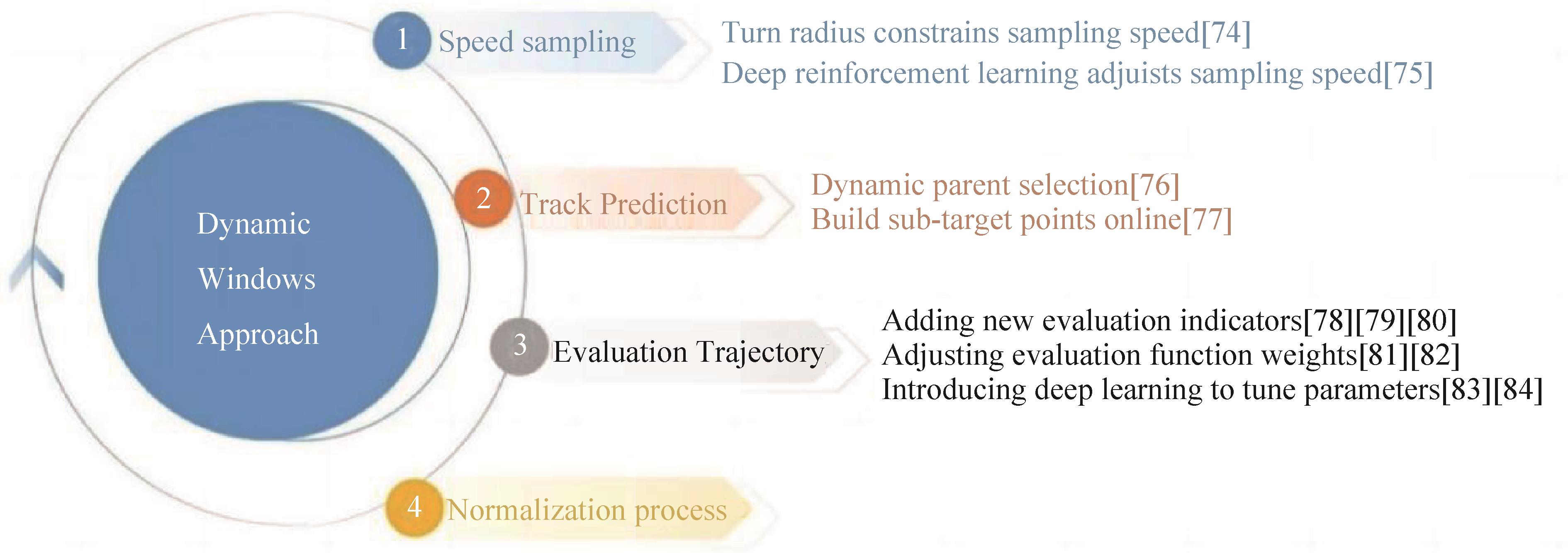
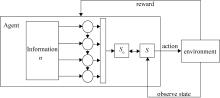
Fig. 9
LSTM Q-Learning structure
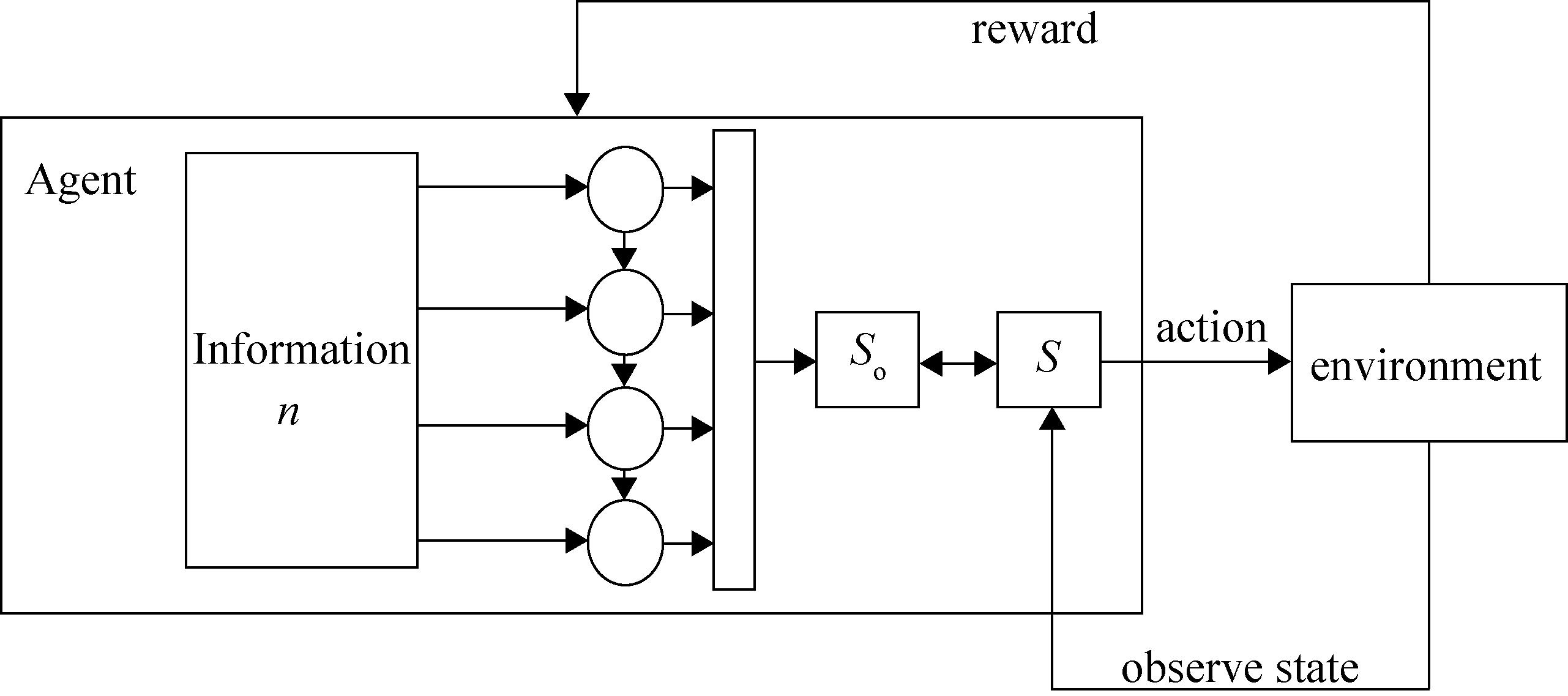

Fig. 10
Robot movement route and pedestrian cost map
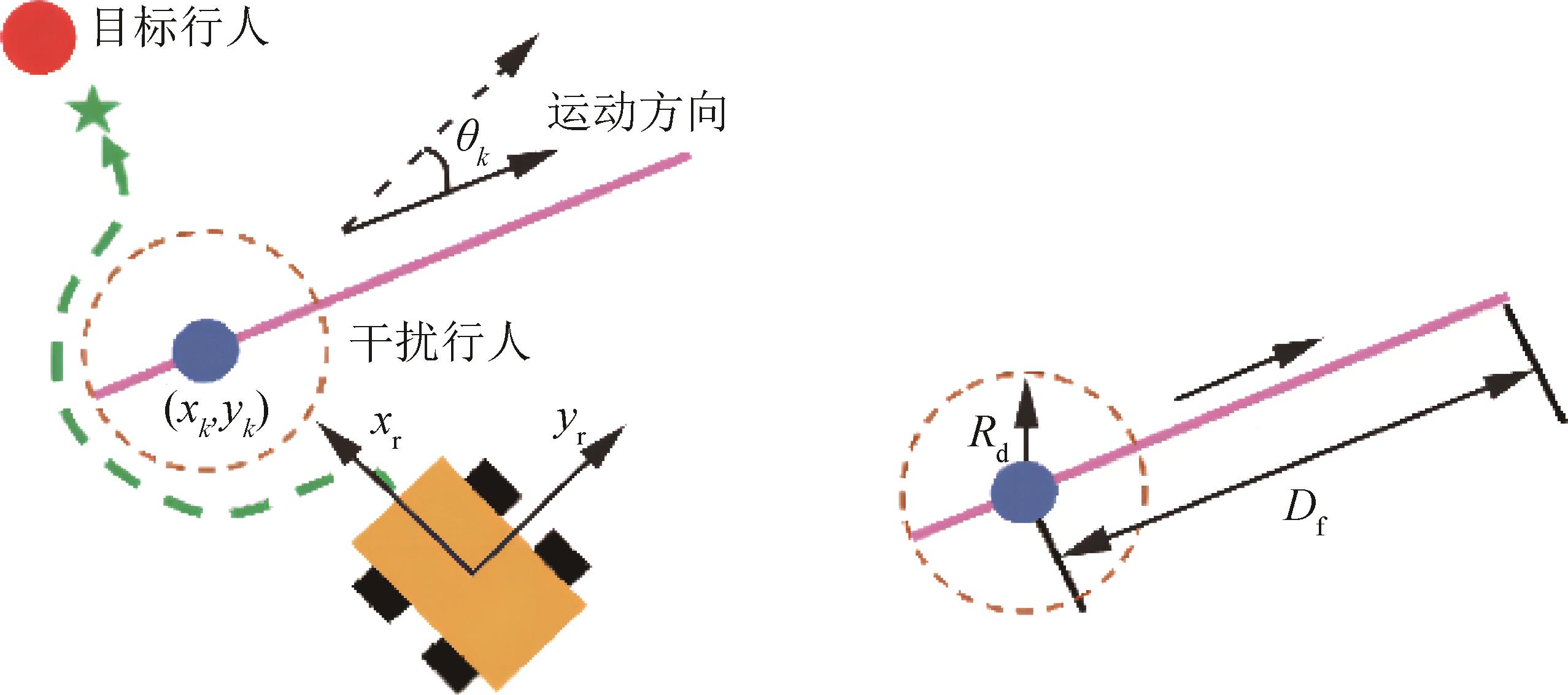
Fig. 11
(a) Motion state estimation; (b) obstacle avoidance effect demonstration
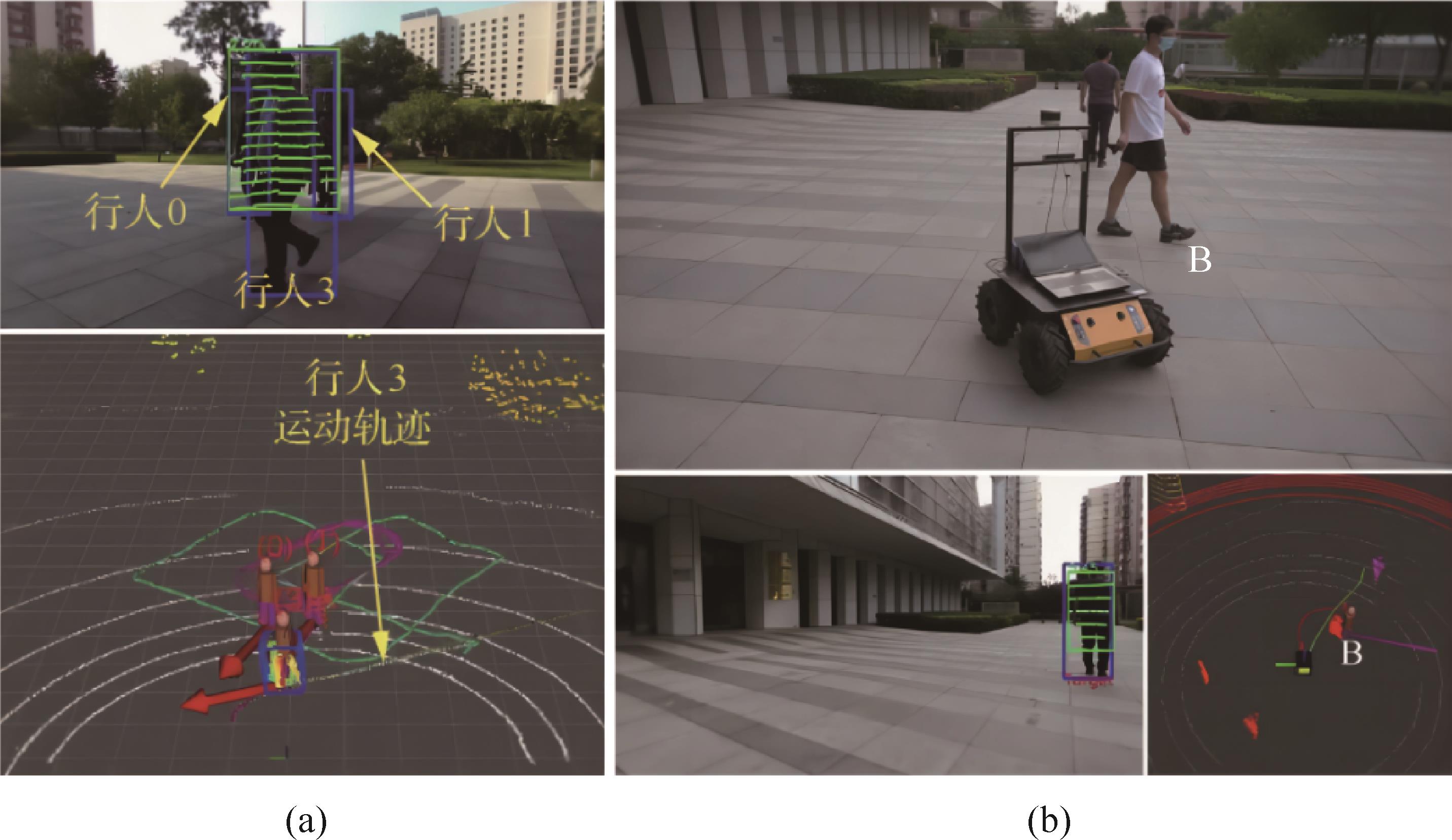
Table 1
Principle of improvement of different algorithms and their advantages and disadvantages
| Path planning methods | Representative methods | Improvement principle | Advantages | Limitations | |
|---|---|---|---|---|---|
Global path planning methods | Sampling-based approach | PRM RRT | Heuristic search; dynamic adjustment of step size | Simple process; quick search | Blind search; stuck in a dead zone |
Graph-based search methods | A* D* Dijkstra | Reduce the number of iterations and inflection points | Rich environmental expression | High environmental model accuracy requirements | |
Intelligent bionic approach | GA ACO PSO | Optimize individuals; improved individual interaction | Highly adaptable; highly efficient | Easily trapped in local optima; slow convergence in later stages | |
Local obstacle avoidance algorithm | DWA | Optimized evaluation function | Low computational complexity; high operability | High demand on the evaluation function; prone to local optima | |
| APF | Refining the potential field function | Highly real time | Require reasonable potential field functions | ||
| TEB | Adding constraints | Multi-objective optimization | Strict parameter requirements | ||
| 1 | Mukherjee Debasmita, Gupta Kashish, Li Hsin Chang, et al. A Survey of Robot Learning Strategies for Human-robot Collaboration in Industrial Settings[J]. Robotics and Computer-Integrated Manufacturing, 2022, 73: 102231. |
| 2 | Sinha A, West A, Vasdev N, et al. Current Practises and the Future of Robotic Surgical Training[J]. The Surgeon, 2023, 21(5): 314-322. |
| 3 | Zhang Shuo, Yao Jiantao, Wang Ruochao, et al. Design of Intelligent Fire-fighting Robot Based on Multi-sensor Fusion and Experimental Study on Fire Scene Patrol[J]. Robotics and Autonomous Systems, 2022, 154: 104122. |
| 4 | Bernardo Rodrigo, M C Sousa João, J S Gonçalves Paulo. Survey on Robotic Systems for Internal Logistics[J]. Journal of Manufacturing Systems, 2022, 65: 339-350. |
| 5 | 孟明辉, 周传德, 陈礼彬, 等. 工业机器人的研发及应用综述[J]. 上海交通大学学报, 2016, 50(增1): 98-101. |
| Meng Minghui, Zhou Chuande, Chen Libin, et al. A Review of the Research and Development of Industrial Robots[J]. Journal of Shanghai Jiaotong University, 2016, 50(S1): 98-101. | |
| 6 | Patle B K, Ganesh Babu L, Pandey Anish, et al. A Review: on Path Planning Strategies for Navigation of Mobile Robot[J]. Defence Technology, 2019, 15(4): 582-606. |
| 7 | Cheng Chunxi, Sha Qixin, He Bo, et al. Path Planning and Obstacle Avoidance for AUV: A Review[J]. Ocean Engineering, 2021, 235: 109355. |
| 8 | 林韩熙, 向丹, 欧阳剑, 等. 移动机器人路径规划算法的研究综述[J]. 计算机工程与应用, 2021, 57(18): 38-48. |
| Lin Hanxi, Xiang Dan, Ouyang Jian, et al. Review of Path Planning Algorithms for Mobile Robots[J]. Computer Engineering and Applications, 2021, 57(18): 38-48. | |
| 9 | 王梓强, 胡晓光, 李晓筱, 等. 移动机器人全局路径规划算法综述[J]. 计算机科学, 2021, 48(10): 19-29. |
| Wang Ziqiang, Hu Xiaoguang, Li Xiaoxiao, et al. Overview of Global Path Planning Algorithms for Mobile Robots[J]. Computer Science, 2021, 48(10): 19-29. | |
| 10 | LaValle S M. Rapidly-exploring Random Trees: A New Tool for Path Planning[J]. IEEE Transactions on Robotics and Automation, 1998, 10(5): 573-582. |
| 11 | Kuffner J J, LaValle S M. RRT-connect: An Efficient Approach to Single-query Path Planning[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2000: 995-1001. |
| 12 | Karaman S, Frazzoli E. Sampling-based Algorithms for Optimal Motion Planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 13 | Zhang Y, Li Y, Li Y. APF-RRT*: An Efficient Sampling-based Path Planning Method with the Guidance of Artificial Potential Field[J]. Journal of Intelligent & Robotic Systems, 2019, 96(3): 575-590. |
| 14 | 陈侠, 刘奎武, 毛海亮. 基于APF-RRT算法的无人机航迹规划[J]. 电光与控制, 2022, 29(5): 17-22. |
| Chen Xia, Liu Kuiwu, Mao Hailiang. UAV Path Planning Based on APF-RRT Algorithm[J]. Electronics Optics & Control, 2022, 29(5): 17-22. | |
| 15 | Wang Yixin, Yu Xiaojun, Yu Chuan, et al. Improved Motion Planning Algorithms Based on Rapidly-exploring Random Tree: A Review[C]//Proceedings of the 8th International Conference on Communication and Information Processing. New York, NY, USA: Association for Computing Machinery, 2022: 1-8. |
| 16 | Situ H J, Lei H B, Zhuang C G. RRT Path Planning Algorithm Based on Artificial Potential Field Guidance in Dynamic Environment[J]. Journal of Computer Applications, 2021, 38(6): 1783-1788. |
| 17 | Ma Guojun, Duan Yunlong, Li Mingze, et al. A Probability Smoothing Bi-RRT Path Planning Algorithm for Indoor Robot[J]. Future Generation Computer Systems, 2023, 143: 349-360. |
| 18 | Tong Tao, Guo Fanghong, Wu Xiang, et al. Global Path Planning for Fire-fighting Robot Based on Advanced Bi-RRT Algorithm[C]//2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA). Piscataway, NJ, USA: IEEE, 2021: 1786-1790. |
| 19 | Ding Jun, Zhou Yinxuan, Huang Xia, et al. An Improved RRT* Algorithm for Robot Path Planning Based on Path Expansion Heuristic Sampling[J]. Journal of Computational Science, 2023, 67: 101937. |
| 20 | Mashayekhi Reza, Mohd Yamani Idna Idris, Anisi M H, et al. Informed RRT*-connect: An Asymptotically Optimal Single-query Path Planning Method[J]. IEEE Access, 2020, 8: 19842-19852. |
| 21 | Jeong I B, Lee Seung-Jae, Kim Jong-Hwan. Quick-RRT*: Triangular Inequality-based Implementation of RRT* with Improved Initial Solution and Convergence Rate[J]. Expert Systems with Applications, 2019, 123: 82-90. |
| 22 | Webb Dustin J, Jur van den Berg. Kinodynamic RRT*: Optimal Motion Planning for Systems with Linear Differential Constraints[EB/OL]. (2012-05-23) [2023-10-13]. . |
| 23 | Guo Jun, Xia Wei, Hu Xiaoxuan, et al. Feedback RRT* Algorithm for UAV Path Planning in a Hostile Environment[J]. Computers & Industrial Engineering, 2022, 174: 108771. |
| 24 | Wang Jiankun, Li Baopu, Meng M Q H. Kinematic Constrained Bi-directional RRT with Efficient Branch Pruning for robot Path Planning[J]. Expert Systems with Applications, 2021, 170: 114541. |
| 25 | Karaman S, Walter M R, Perez A, et al. Anytime Motion Planning Using the RRT*[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2011: 1478-1483. |
| 26 | Ahmed Hussain Qureshi, Ayaz Yasar. Potential Functions Based Sampling Heuristic for Optimal Path Planning[J]. Autonomous Robots, 2016, 40(6): 1079-1093. |
| 27 | Li Yanjie, Wei Wu, Gao Yong, et al. PQ-RRT*: An Improved Path Planning Algorithm for Mobile Robots[J]. Expert Systems with Applications, 2020, 152: 113425. |
| 28 | Wang Yi, Liu Dun, Zhao Hongmei, et al. Rapid Citrus Harvesting Motion Planning with Pre-harvesting Point and Quad-tree[J]. Computers and Electronics in Agriculture, 2022, 202: 107348. |
| 29 | Xiong Jing, Duan Xiaokun. Path Planning for UAV Based on Improved Dynamic Step RRT Algorithm[J]. Journal of Physics: Conference Series, 2021, 1983(1): 012034. |
| 30 | 李晓旭, 马兴录, 王先鹏. 移动机器人路径规划算法综述[J]. 计算机测量与控制, 2022, 30(7): 9-19. |
| Li Xiaoxu, Ma Xinglu, Wang Xianpeng, et al. A Survey of Path Planning Algorithms for Mobile Robots[J]. Computer Measurement & Control, 2022, 30(7): 9-19. | |
| 31 | 陈志勇, 吴精华. 基于目标导向采样的机器人改进概率路图法研究[J]. 农业机械学报, 2023, 54(6): 410-418, 426. |
| Chen Zhiyong, Wu Jinghua. Improved Probability Path Graph Method for Robots Based on Goal-oriented Sampling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(6): 410-418, 426. | |
| 32 | Li Weimin, Wang Lei, Zou Awei, et al. Path Planning for UAV Based on Improved PRM[J]. Energies, 2022, 15(19): 7267. |
| 33 | 程谦, 高嵩, 曹凯, 等. 基于PRM优化算法的移动机器人路径规划[J]. 计算机应用与软件, 2020, 37(12): 254-259, 296. |
| Cheng Qian, Gao Song, Cao Kai, et al. Path Planning of Mobile Robot Based on PRM Optimization Algorithm[J]. Computer Applications and Software, 2020, 37(12): 254-259, 296. | |
| 34 | Paliwal Pulkit. A Survey of A-star Algorithm Family for Motion Planning of Autonomous Vehicles[C]//2023 IEEE International Students' Conference on Electrical, Electronics and Computer Science (SCEECS). Piscataway, NJ, USA: IEEE, 2023: 1-6. |
| 35 | Yangqi Ou, Fan Yuexin, Zhang Xinglan, et al. Improved A* Path Planning Method Based on the Grid Map[J]. Sensors, 2022, 22(16): 6198. |
| 36 | 刘子豪, 赵津, 刘畅, 等. 基于改进A*算法室内移动机器人路径规划[J]. 计算机工程与应用, 2021, 57(2): 186-190. |
| Liu Zihao, Zhao Jin, Liu Chang, et al. Path Planning of Indoor Mobile Robot Based on Improved A* Algorithm[J]. Computer Engineering and Applications, 2021, 57(2): 186-190. | |
| 37 | Tang Gang, Tang Congqiang, Claramunt C, et al. Geometric A-star Algorithm: An Improved A-star Algorithm for AGV Path Planning in a Port Environment[J]. IEEE Access, 2021, 9: 59196-59210. |
| 38 | 刘钰铭, 黄海松, 范青松, 等. 基于改进A*_DWA算法的移动机器人路径规划[J/OL]. 计算机集成制造系统. (2022-11-28) [2023-10-15]. . |
| Liu Yuming, Huang Haissong, Fan Qingsong, et al. Based on Improved A*_DWA Algorithm for Mobile Robot Path Planning[J/OL]. Computer Integrated Manufacturing Systems. (2022-11-28) [2023-10-15]. . | |
| 39 | Jiang Haojie, Sun Yuan. Research on Global Path Planning of Electric Disinfection Vehicle Based on Improved A* Algorithm[J]. Energy Reports, 2021, 7, (S7): 1270-1279. |
| 40 | 秦旭, 黄晓华, 马东明, 等. 基于改进D*算法的巡检机器人路径规划[J]. 组合机床与自动化加工技术, 2022(6): 10-13. |
| Qin Xu, Huang Xiaohua, Ma Dongming, et al. Path Planning of Inspection Robot Based on Improved D* Algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(6): 10-13. | |
| 41 | 王帅军, 胡立坤, 王一飞. 基于改进D*算法的室内移动机器人路径规划[J]. 计算机工程与设计, 2020, 41(4): 1118-1124. |
| Wang Shuaijun, Hu Likun, Wang Yifei, et al. Path Planning of Indoor Mobile Robot Based on Improved D* Algorithm[J]. Computer Engineering and Design, 2020, 41(4): 1118-1124. | |
| 42 | 朱蟋蟋, 孙兵, 朱大奇. 基于改进D*算法的AUV三维动态路径规划[J]. 控制工程, 2021, 28(4): 736-743. |
| Zhu Xixi, Sun Bing, Zhu Daqi, et al. Three-dimensional Dynamic Path Planning of AUV Based on Improved D* Algorithm[J]. Control Engineering of China, 2021, 28(4): 736-743. | |
| 43 | 李世奇, 孙兵, 朱蟋蟋. 海流环境下基于改进D*算法的AUV动态路径规划[J]. 高技术通讯, 2022, 32(1): 84-92. |
| Li Shiqi, Sun Bing, Zhu Xixi, et al. Autonomous Underwater Vehicles Dynamic Path Planning Based on Improved D* Algorithm in Ocean Current Environment[J]. Chinese High Technology Letters, 2022, 32(1): 84-92. | |
| 44 | 刘军, 冯硕, 任建华. 移动机器人路径动态规划有向D*算法[J]. 浙江大学学报(工学版), 2020, 54(2): 291-300. |
| Liu Jun, Feng Shuo, Ren Jianhua, et al. Directed D* Algorithm for Dynamic Path Planning of Mobile Robots[J]. Journal of Zhejiang University(Engineering Science), 2020, 54(2): 291-300. | |
| 45 | Sedeño-Noda Antonio, Colebrook Marcos. A Biobjective Dijkstra Algorithm[J]. European Journal of Operational Research, 2019, 276(1): 106-118. |
| 46 | 姜辰凯, 李智, 盘书宝, 等. 基于改进Dijkstra算法的AGVs无碰撞路径规划[J]. 计算机科学, 2020, 47(8): 272-277. |
| Jiang Chenkai, Li Zhi, Pan Shubao, et al. Collision-free Path Planning of AGVs Based on Improved Dijkstra Algorithm[J]. Computer Science, 2020, 47(8): 272-277. | |
| 47 | Sun Yinghui, Fang Ming, Su Yixin. AGV Path Planning based on Improved Dijkstra Algorithm[J]. Journal of Physics: Conference Series, 2021, 1746(1): 012052. |
| 48 | 李全勇, 李波, 张瑞, 等. 基于改进Dijkstra算法的AGV路径规划研究[J]. 机械工程与自动化, 2021(1): 23-25, 28. |
| Li Quanyong, Li Bo, Zhang Rui, et al. Research on AGV Path Planning Based on Improved Dijkstra Algorithm[J]. Mechanical Engineering & Automation, 2021(1): 23-25, 28. | |
| 49 | Zhu Zhenyu, Li Lianbo, Wu Wenhao, et al. Application of Improved Dijkstra Algorithm in Intelligent Ship Path Planning[C]//2021 33rd Chinese Control and Decision Conference (CCDC). Piscataway, NJ, USA: IEEE, 2021: 4926-4931. |
| 50 | 梁彧. 基于改进Dijkstra算法的AGV智能车路径规划[J]. 科技与创新, 2020(24): 159-160, 封3. |
| Liang Yu. Path Planning of AGV Intelligent Vehicle Based on Improved Dijkstra Algorithm[J]. Science and Technology & Innovation, 2020(24): 159-160, 封3. | |
| 51 | Hao Kun, Zhao Jiale, Li Zhisheng, et al. Dynamic Path Planning of a Three-dimensional Underwater AUV Based on an Adaptive Genetic Algorithm[J]. Ocean Engineering, 2022, 263: 112421. |
| 52 | Sarkar Ritam, Barman Debaditya, Chowdhury Nirmalya. Domain Knowledge Based Genetic Algorithms for Mobile Robot Path Planning Having Single and Multiple Targets[J]. Journal of King Saud University - Computer and Information Sciences, 2022, 34(7): 4269-4283. |
| 53 | Guo Hui, Mao Zhaoyong, Ding Wenjun, et al. Optimal Search Path Planning for Unmanned Surface Vehicle Based on an Improved Genetic Algorithm[J]. Computers & Electrical Engineering, 2019, 79: 106467. |
| 54 | Lamini Chaymaa, Benhlima Said, Elbekri Ali. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning[J]. Procedia Computer Science, 2018, 127: 180-189. |
| 55 | Volkan Pehlivanoglu Y, Pehlivanoglu Perihan. An Enhanced Genetic Algorithm for Path Planning of Autonomous UAV in Target Coverage Problems[J]. Applied Soft Computing, 2021, 112: 107796. |
| 56 | Hao Kun, Zhao Jiale, Yu Kaicheng, et al. Path Planning of Mobile Robots Based on a Multi-population Migration Genetic Algorithm[J]. Sensors, 2020, 20(20): 5873. |
| 57 | Xin Junfeng, Zhong Jiabao, Yang Fengru, et al. An Improved Genetic Algorithm for Path-Planning of Unmanned Surface Vehicle[J]. Sensors, 2019, 19(11): 2640. |
| 58 | Dorigo M, Gambardella L M. Ant Colony System: A Cooperative Learning Approach to the Traveling Salesman Problem[J]. IEEE Transactions on Evolutionary Computation, 1997, 1(1): 53-66. |
| 59 | Wu Lei, Huang Xiaodong, Cui Junguo, et al. Modified Adaptive Ant Colony Optimization Algorithm and Its Application for Solving Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2023, 215: 119410. |
| 60 | Xie Xingwen, Tang Zhihong, Cai Jiejin. The Multi-objective Inspection Path-planning in Radioactive Environment Based on an Improved Ant Colony Optimization Algorithm[J]. Progress in Nuclear Energy, 2022, 144: 104076. |
| 61 | Luo Qiang, Wang Haibao, Zheng Yan, et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Neural Computing and Applications, 2020, 32(6): 1555-1566. |
| 62 | Miao Changwei, Chen Guangzhu, Yan Chengliang, et al. Path Planning Optimization of Indoor Mobile Robot Based on Adaptive Ant Colony Algorithm[J]. Computers & Industrial Engineering, 2021, 156: 107230. |
| 63 | Gao Xiang, Jin Wuyin, Zhang Xia, et al. Application of Improved Ant Colony Algorithm in Mobile Robot Path Planning[C]//Proceedings Volume 12259, 2nd International Conference on Applied Mathematics, Modelling, and Intelligent Computing (CAMMIC 2022). Bellingham, WA, USA: SPIE, 2022: 122595K. |
| 64 | Hou Wenbin, Xiong Zhihua, Wang Changsheng, et al. Enhanced Ant Colony Algorithm with Communication Mechanism for Mobile Robot Path Planning[J]. Robotics and Autonomous Systems, 2022, 148: 103949. |
| 65 | Yue Longwang, Chen Hanning. Unmanned Vehicle Path Planning Using a Novel Ant Colony Algorithm[J]. EURASIP Journal on Wireless Communications and Networking, 2019, 2019(1): 136. |
| 66 | Tian Shasha, Li Yuanxiang, Kang Yilin, et al. Multi-robot Path Planning in Wireless Sensor Networks Based on Jump Mechanism PSO and Safety Gap Obstacle Avoidance[J]. Future Generation Computer Systems, 2021, 118: 37-47. |
| 67 | Ma Zeyuan, Chen Jing. Adaptive Path Planning Method for UAVs in Complex Environments[J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 115: 103133. |
| 68 | Song Baoye, Wang Zidong, Zou Lei. An Improved PSO Algorithm for Smooth Path Planning of Mobile Robots Using Continuous High-degree Bezier Curve[J]. Applied Soft Computing, 2021, 100: 106960. |
| 69 | Yu Zhenhua, Si Zhijie, Li Xiaobo, et al. A Novel Hybrid Particle Swarm Optimization Algorithm for Path Planning of UAVs[J]. IEEE Internet of Things Journal, 2022, 9(22): 22547-22558. |
| 70 | Girija S, Joshi Ashok. Fast Hybrid PSO-APF Algorithm for Path Planning in Obstacle Rich Environment[J]. IFAC-PapersOnLine, 2019, 52(29): 25-30. |
| 71 | Xiang Zhenglong, Ji Daomin, Zhang Heng, et al. A Simple PID-based Strategy for Particle Swarm Optimization Algorithm[J]. Information Sciences, 2019, 502: 558-574. |
| 72 | Fox D, Burgard W, Thrun S. The Dynamic Window Approach to Collision Avoidance[J]. IEEE Robotics & Automation Magazine, 1997, 4(1): 23-33. |
| 73 | Hang Peng, Yan Yan, Fu Xianlan, et al. Research on Local Path Planning of Intelligent Vehicle Based on Improved Dynamic Window Approach[C]//Proceedings Volume 12610, Third International Conference on Artificial Intelligence and Computer Engineering (ICAICE 2022). Bellingham, WA, USA: SPIE, 2023: 126105H. |
| 74 | Kim Jinseok, Hun Yang Gi. Improvement of Dynamic Window Approach Using Reinforcement Learning in Dynamic Environments[J]. International Journal of Control Automation and Systems, 2022, 20(9): 2983-2992. |
| 75 | Han Sen, Wang Lei, Wang Yiting, et al. A Dynamically Hybrid Path Planning for Unmanned Surface Vehicles Based on Non-uniform Theta* and Improved Dynamic Windows Approach[J]. Ocean Engineering, 2022, 257: 111655. |
| 76 | Fu Qingchen, Wang Shuting, Zhang Hongyang, et al. Improved Local Path Planning for Mobile Robot Using Modified Dynamic Window Approach[C]//IECON 2022-48th Annual Conference of the IEEE Industrial Electronics Society. Piscataway, NJ, USA: IEEE, 2022: 1-6. |
| 77 | Yan Xiaozhen, Ding Ruochen, Luo Qinghua, et al. A Dynamic Path Planning Algorithm Based on the Improved DWA Algorithm[C]//2022 Global Reliability and Prognostics and Health Management (PHM-Yantai). Piscataway, NJ, USA: IEEE, 2022: 1-7. |
| 78 | Liu Haoxin, Zhang Yonghui. ASL-DWA: An Improved A-star Algorithm for Indoor Cleaning Robots[J]. IEEE Access, 2022, 10: 99498-99515. |
| 79 | Wang Zhenyu, Liang Yan, Gong Changwei, et al. Improved Dynamic Window Approach for Unmanned Surface Vehicles' Local Path Planning Considering the Impact of Environmental Factors[J]. Sensors, 2022, 22(14): 5181. |
| 80 | Xiang Lidan, Li Ximin, Liu Hao, et al. Parameter Fuzzy Self-adaptive Dynamic Window Approach for Local Path Planning of Wheeled Robot[J]. IEEE Open Journal of Intelligent Transportation Systems, 2022, 3: 1-6. |
| 81 | Zhang Jianhua, Feng Qi, Zhao, Aidi, et al. Local Path Planning of Mobile Robot Based on Self-adaptive Dynamic Window Approach[J]. Journal of Physics: Conference Series, 2021, 1905(1): 012019. |
| 82 | Matsuzaki Sango, Aonuma Shinta, Hasegawa Yuji. Dynamic Window Approach with Human Imitating Collision Avoidance[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2021: 8180-8186. |
| 83 | Chang Lu, Shan Liang, Jiang Chao, et al. Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment[J]. Autonomous Robots, 2021, 45(1): 51-76. |
| 84 | Wu Zhengtian, Dai Jinyu, Jiang Baoping, et al. Robot Path Planning Based on Artificial Potential Field with Deterministic Annealing[J]. ISA Transactions, 2023, 138: 74-87. |
| 85 | Chen Yanli, Bai Guiqiang, Zhan Yin, et al. Path Planning and Obstacle Avoiding of the USV Based on Improved ACO-APF Hybrid Algorithm with Adaptive Early-warning[J]. IEEE Access, 2021, 9: 40728-40742. |
| 86 | Luo Jie, Wang Zhongxun, Pan Kanglu. Reliable Path Planning Algorithm Based on Improved Artificial Potential Field Method[J]. IEEE Access, 2022, 10: 108276-108284. |
| 87 | He Naifeng, Su Yifan, Guo Jilu, et al. Dynamic Path Planning of Mobile Robot Based on Artificial Potential Field[C]//2020 International Conference on Intelligent Computing and Human-computer Interaction (ICHCI). Piscataway, NJ, USA: IEEE, 2020: 259-264. |
| 88 | Li Hongcai, Liu Wenjie, Yang Chao, et al. An Optimization-based Path Planning Approach for Autonomous Vehicles Using the DynEFWA-artificial Potential Field[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(2): 263-272. |
| 89 | Guo Siyu, Zhang Xiuguo, Zheng Yisong, et al. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning[J]. Sensors, 2020, 20(2): 426. |
| 90 | Yao Qingfeng, Zheng Zeyu, Qi Liang, et al. Path Planning Method with Improved Artificial Potential Field-a Reinforcement Learning Perspective[J]. IEEE Access, 2020, 8: 135513-135523. |
| 91 | Li Bohao, Wu Yunjie. Path Planning for UAV Ground Target Tracking via Deep Reinforcement Learning[J]. IEEE Access, 2020, 8: 29064-29074. |
| 92 | Roesmann Christoph, Feiten Wendelin, Woesch Thomas, et al. Trajectory Modification Considering Dynamic Constraints of Autonomous Robots[C]//ROBOTIK 2012; 7th German Conference on Robotics. Piscataway, NJ, USA: IEEE, 2012: 1-6. |
| 93 | Rösmann Christoph, Feiten Wendelin, Wösch Thomas, et al. Efficient Trajectory Optimization Using a Sparse Model[C]//2013 European Conference on Mobile Robots. Piscataway, NJ, USA: IEEE, 2013: 138-143. |
| 94 | 文郁, 黄江帅, 江涛, 等. 安全平滑的改进时间弹性带轨迹规划算法[J]. 控制与决策, 2022, 37(8): 2008-2016. |
| Wen Yu, Huang Jiangshuai, Jiang Tao, et al. Safe and Smooth Improved Time Elastic Band Trajectory Planning Algorithm[J]. Control and Decision, 2022, 37(8): 2008-2016. | |
| 95 | Rösmann Christoph, Makarow Artemi, Bertram Torsten. Online Motion Planning Based on Nonlinear Model Predictive Control with Non-Euclidean Rotation Groups[C]//2021 European Control Conference (ECC). Piscataway, NJ, USA: IEEE, 2021: 1583-1590. |
| 96 | Lan Anh Nguyen, Trung Dung Pham, Trung Dung Ngo, et al. A Proactive Trajectory Planning Algorithm for Autonomous Mobile Robots in Dynamic Social Environments[C]//2020 17th International Conference on Ubiquitous Robots (UR). Piscataway, NJ, USA: IEEE, 2020: 309-314. |
| 97 | 庞磊, 曹志强, 喻俊志. 基于A*和TEB融合的行人感知无碰跟随方法[J]. 航空学报, 2021, 42(4): 495-504. |
| Pang Lei, Cao Zhiqiqng, Yu Junzhi. A Pedestrian-aware Collision-free Following Approach for Mobile Robots Based on A* and TEB[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 495-504. | |
| 98 | Wu Jiafeng, Ma Xianghua, Peng Tongrui, et al. An Improved Timed Elastic Band (TEB) Algorithm of Autonomous Ground Vehicle (AGV) in Complex Environment[J]. Sensors, 2021, 21(24): 8312. |
| 99 | 郑凯林, 韩宝玲, 王新达. 基于改进TEB算法的阿克曼机器人运动规划系统[J]. 科学技术与工程, 2020, 20(10): 3997-4003. |
| Zheng Kailin, Han Baoling, Wang Xinda. Ackerman Robot Motion Planning System Based on Improved TEB Algorithm[J]. Science Technology and Engineering, 2020, 20(10): 3997-4003. | |
| 100 | Wang Jiayi, Luo Yonghu, Tan Xiaojun. Path Planning for Automatic Guided Vehicles (AGVs) Fusing MH-RRT with Improved TEB[J]. Actuators, 2021, 10(12): 314. |
| 101 | Qin Hongwei, Shao Shiliang, Wang Ting, et al. Review of Autonomous Path Planning Algorithms for Mobile Robots[J]. Drones, 2023, 7(3): 211. |
| [1] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [2] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [3] | Lin Guijuan, Li Zihan, Wang Yu. Research on Improved A* Algorithm Path Planning Based on Global Key Point Extraction [J]. Journal of System Simulation, 2025, 37(3): 667-678. |
| [4] | Li Jiongyi, Li Qiang, Zhang Xinwen, Htet Zin Myo, Cai Yongbin. Improved Bidirectional A* Quadratic Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2025, 37(2): 498-507. |
| [5] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [6] | Yang Lanying, Li Chao, Zou Haifeng, Wan Jiangtao, Zhang Renqiang, Liu Hui, Lu Hong. Robot Path Planning Optimization Based on Fusion of Improved Ant Colony Algorithm and A* Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2956-2965. |
| [7] | Luo Yi, Deng Jia. Path Planning for Mobile Robots Based on Improved RRT-Connect and DWA Fusion [J]. Journal of System Simulation, 2025, 37(10): 2545-2556. |
| [8] | Xu Jianmin, Song Lei, Deng Dongdong, Chen Yaoruo, Yang Wei. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized DWA Algorithm [J]. Journal of System Simulation, 2025, 37(1): 257-270. |
| [9] | Sun Haijie, San Hongjun, Xiao Le, Yao Dexin, Chen Jiupeng, Yang Xiaoyuan. An Improved Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2024, 36(9): 2193-2207. |
| [10] | Yao Wanye, Pang Zewei, Sun Peijie, Wang Zhu. Research on ORB-SLAM Algorithm Based on Windowed Matching Estimation [J]. Journal of System Simulation, 2024, 36(9): 2032-2042. |
| [11] | Kang Liang, Du Yi, Yin Lihua. An Improved Cat Swarm Optimization for Heterogeneous Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(8): 1958-1968. |
| [12] | Wang Yaru, Yao Dexin, Liu Zengli, Peng Yi. Path Planning for Mobile Robot Based on Angle Search [J]. Journal of System Simulation, 2024, 36(7): 1643-1654. |
| [13] | Lei Xu, Chen Jingyi, Chen Xiaoyang. Research on Path Planning of Warehouse Robot with Improved Harris Hawks Algorithm [J]. Journal of System Simulation, 2024, 36(5): 1081-1092. |
| [14] | Liu Jinhui, Chen Mengyuan, Han Pengpeng, Chen Hebao, Zhang Yukun. A Graph Neural Network Visual SLAM Algorithm for Large-angle View Motion [J]. Journal of System Simulation, 2024, 36(5): 1043-1060. |
| [15] | Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(4): 957-968. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
