

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (2): 332-345.doi: 10.16182/j.issn1004731x.joss.24-1327
• Machine Learning Algorithms • Previous Articles Next Articles
Zhu Ling, Li Jing, Zhang Zhaohui
Received:2024-12-02
Revised:2025-01-16
Online:2026-02-18
Published:2026-02-11
Contact:
Li Jing
CLC Number:
Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm[J]. Journal of System Simulation, 2026, 38(2): 332-345.
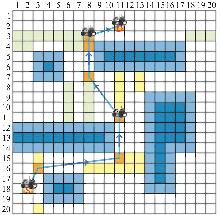
Fig. 1
Network model of robot path planning
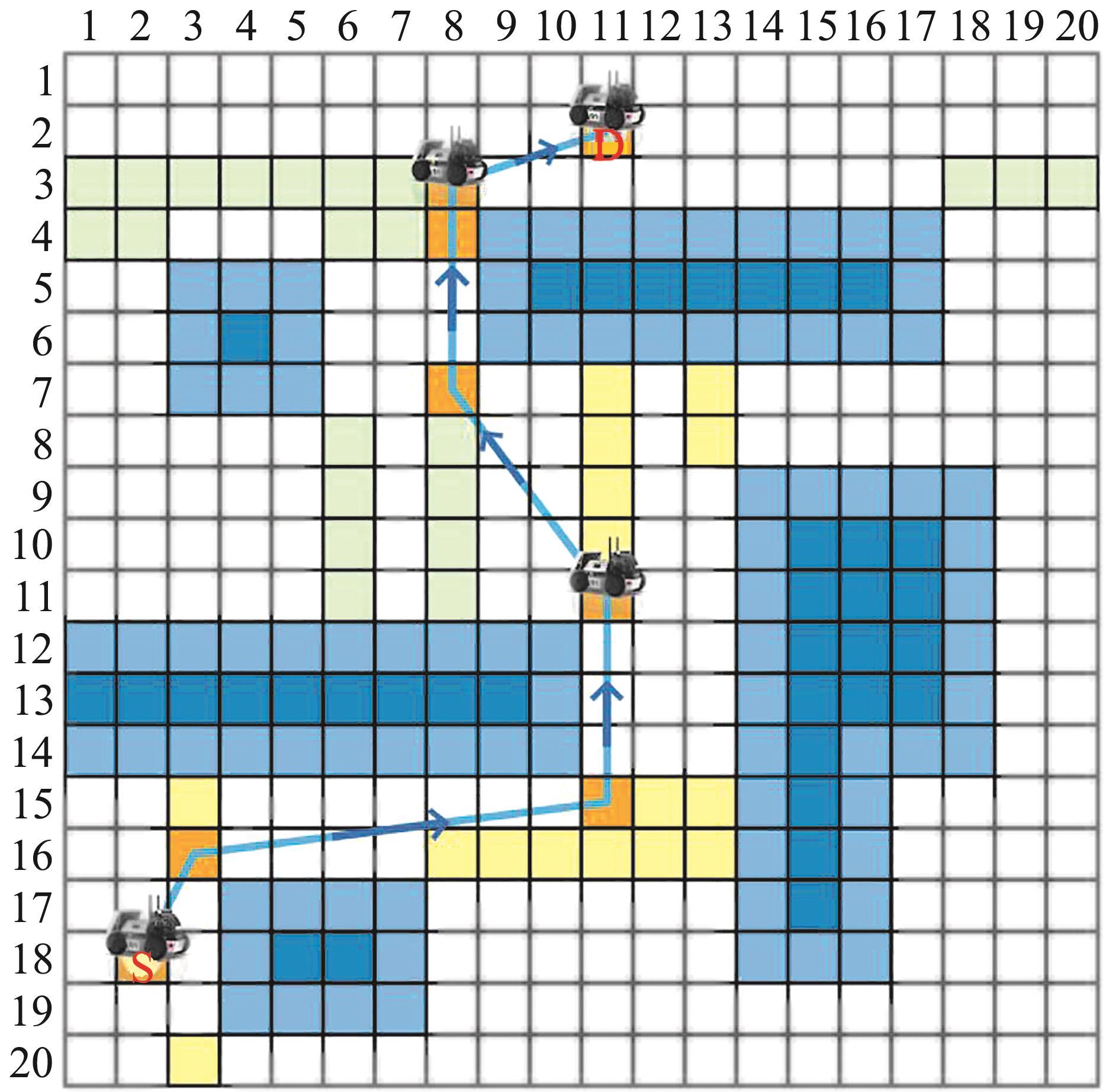
Table 1
Meaning of different colors in network model
| 矩阵元素数值 | 对应颜色 | 含义 |
|---|---|---|
| 1 | 白色 | 未阻塞单元NO |
| 2 | 蓝色 | 阻塞单元O |
| 3 | 浅蓝色 | 安全缓冲区域SBA |
| 5 | 橘色 | 路径点PN |
| 6 | 黄色 | 正向通行区间FPI |
| 7 | 绿色 | 反向通行区间RPI |
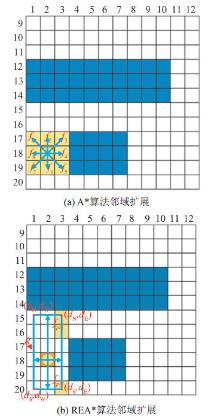
Fig. 2
Neighbor expansion strategy of two algorithms
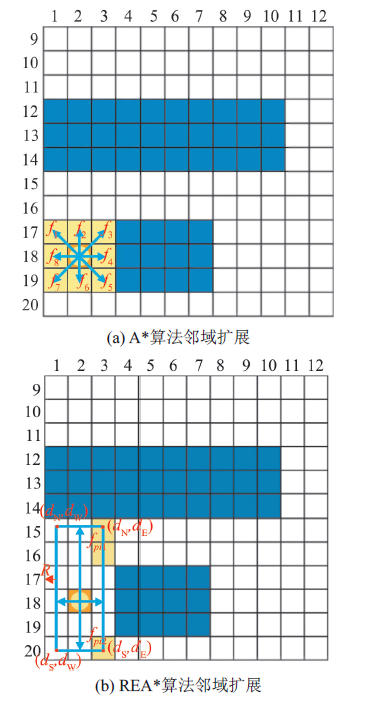
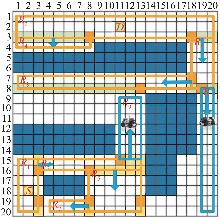
Fig. 3
Termination failure determination
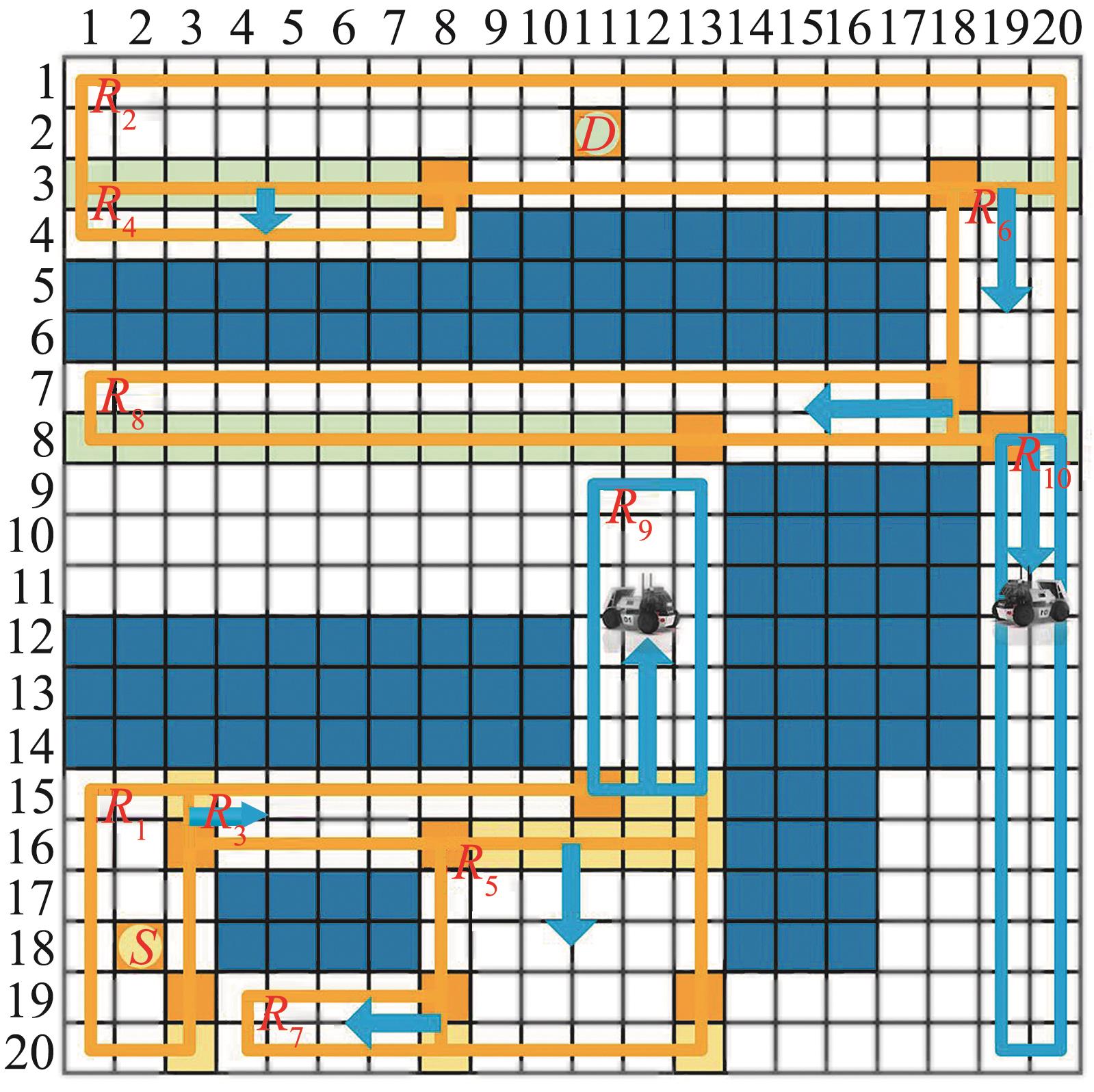

Fig. 4
Slide-rail corner adjustment method
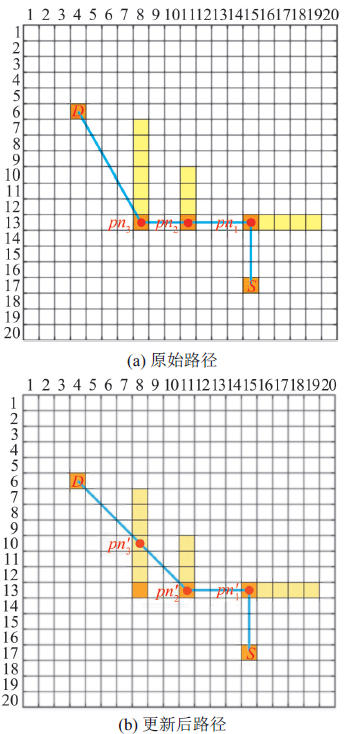

Fig. 5
Improved REA* algorithm flow

Fig. 6
Bidirectional neighbor expansion
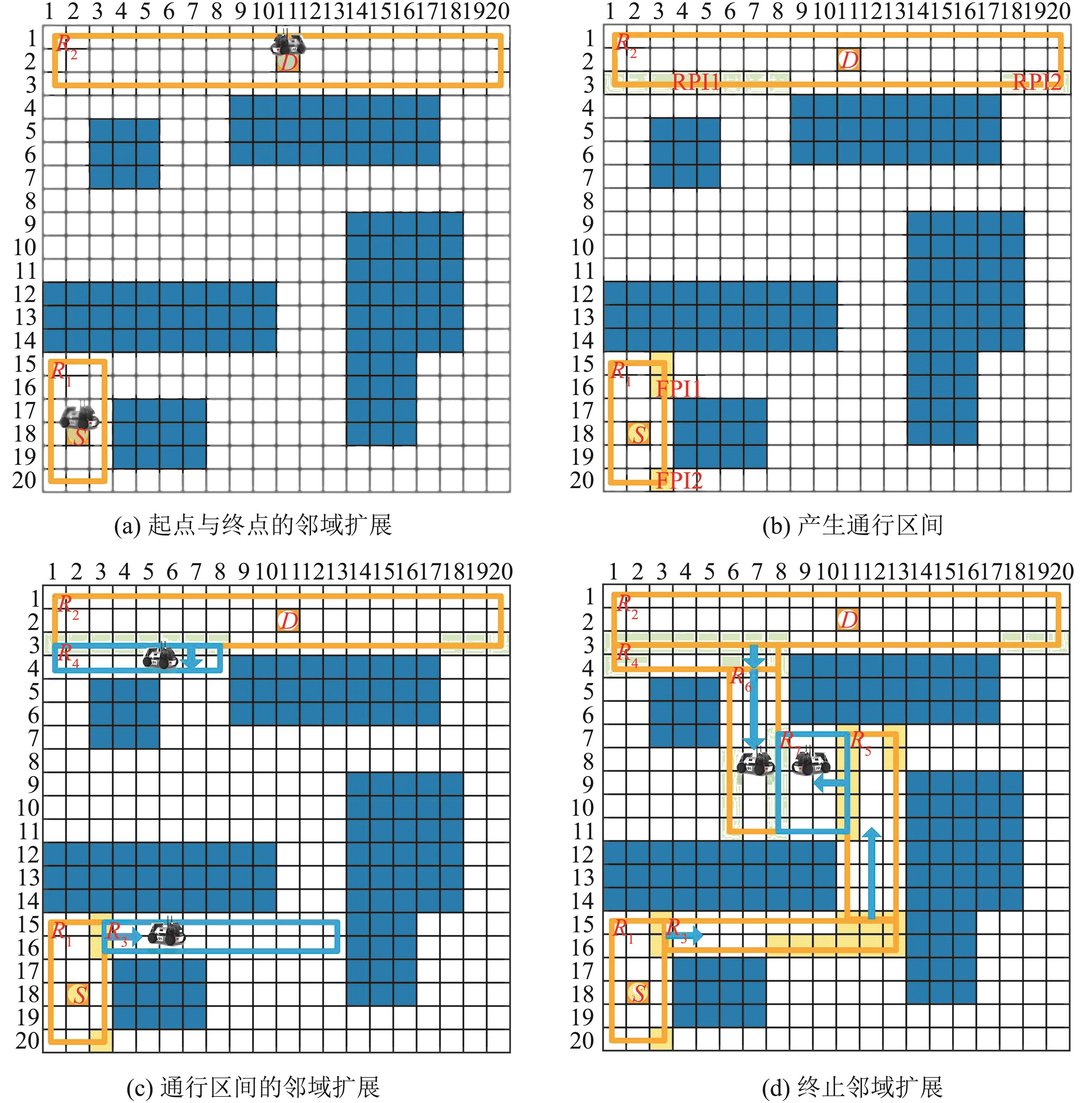
Table 2
Correspondence of directions
| 方向 | 向量 | 对应数字 | 方向 | 向量 | 对应数字 |
|---|---|---|---|---|---|
| 北 | [-1, 0] | 1 | 西 | [0, -1] | 3 |
| 南 | [1, 0] | 2 | 东 | [0, 1] | 4 |
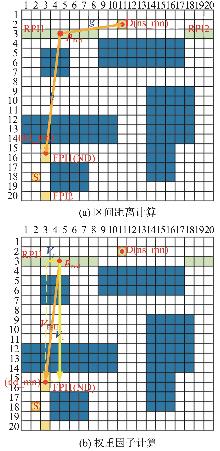
Fig. 7
Evaluation function calculation
Fig. 8
Starting direction judgment
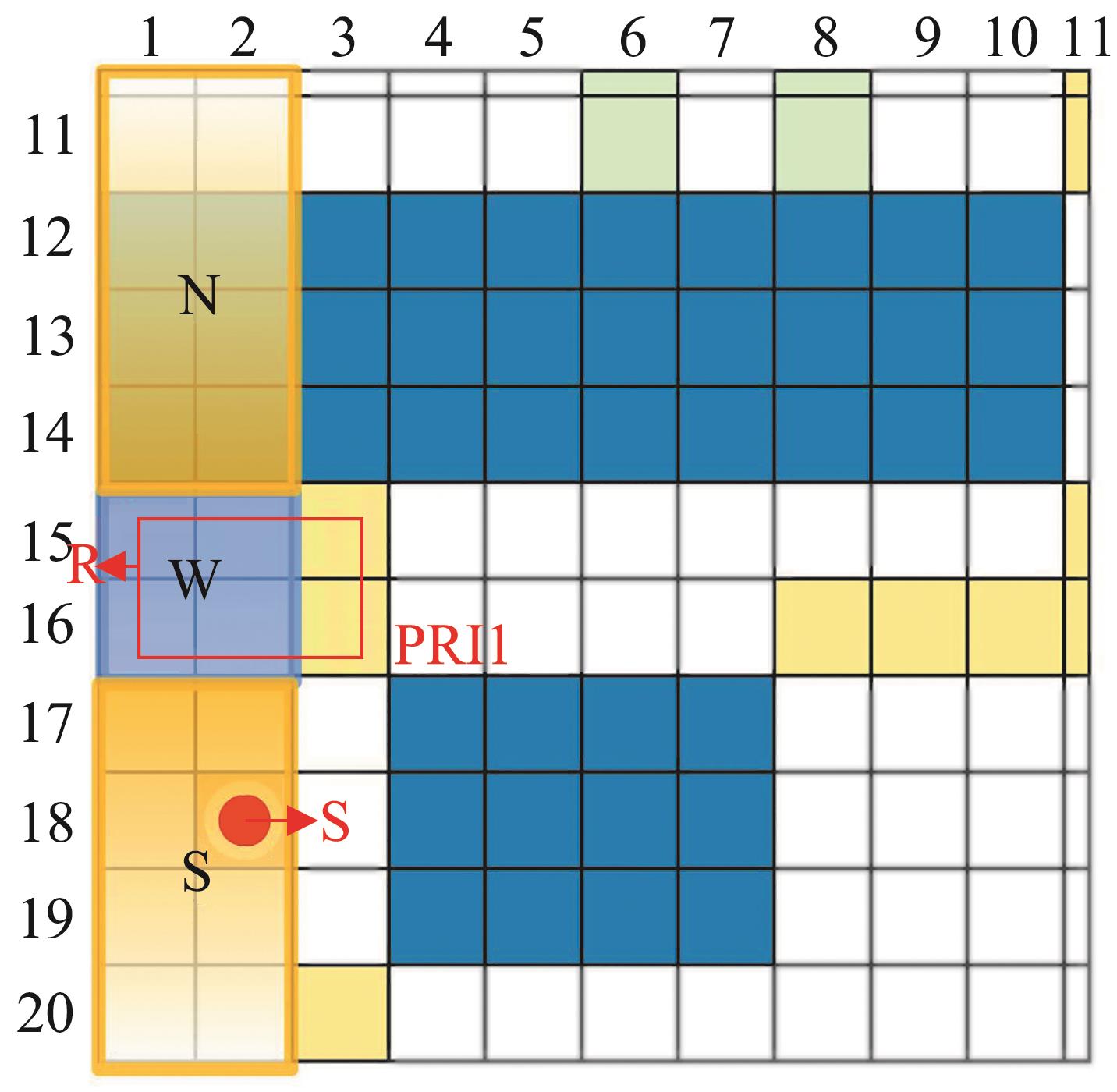
Fig. 9
U-turn
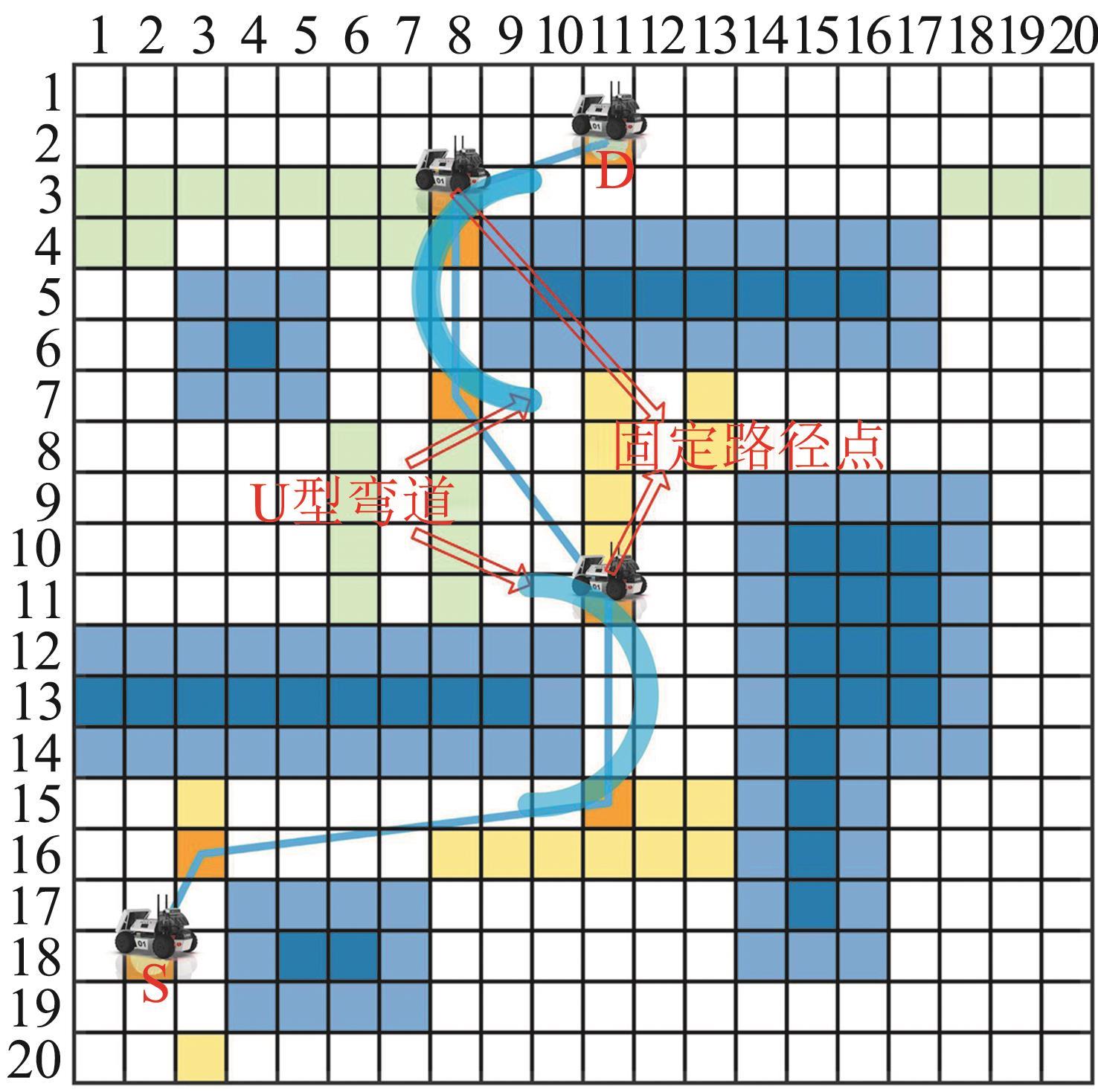
Fig. 10
Intersection of interval and line
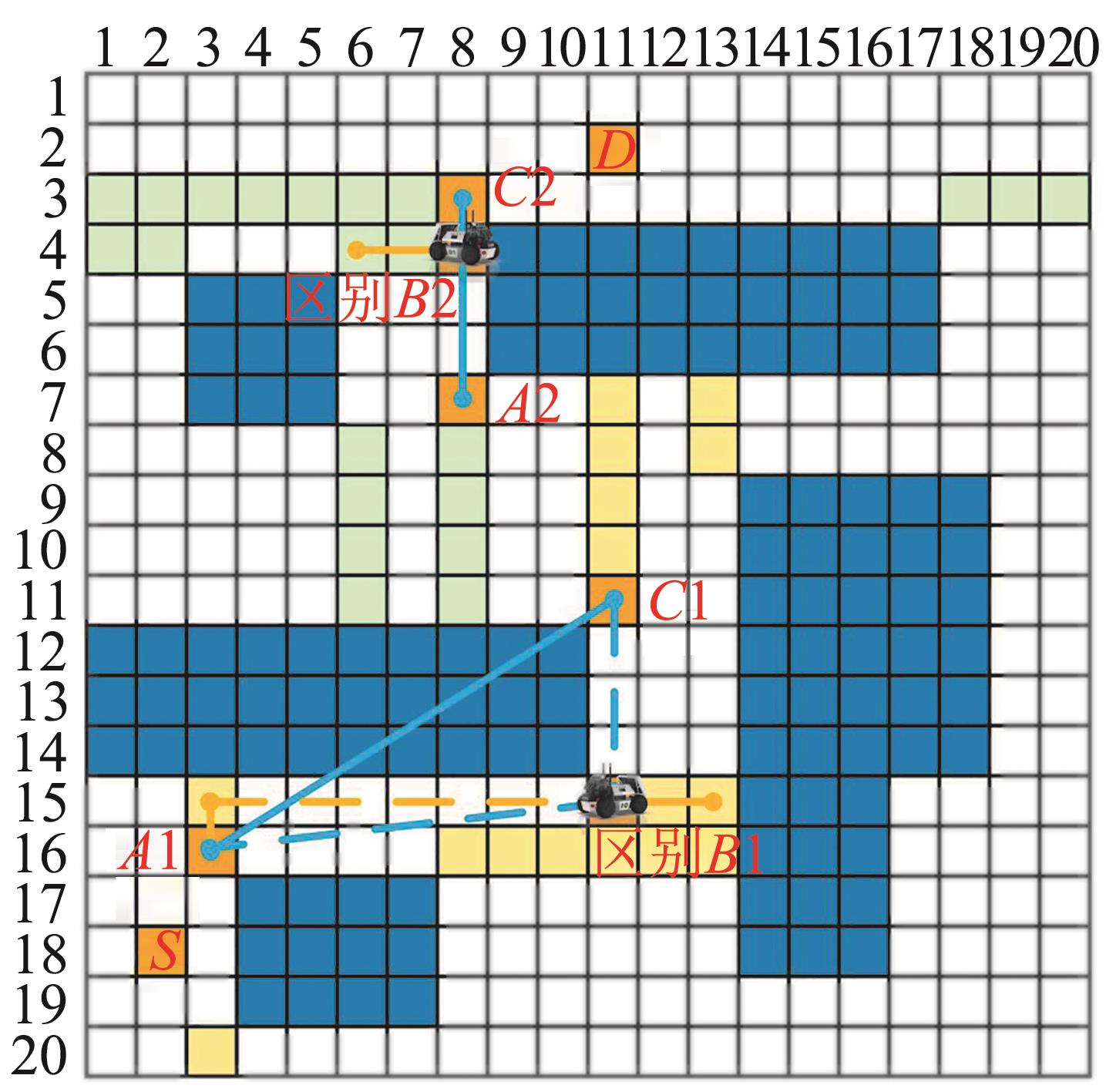
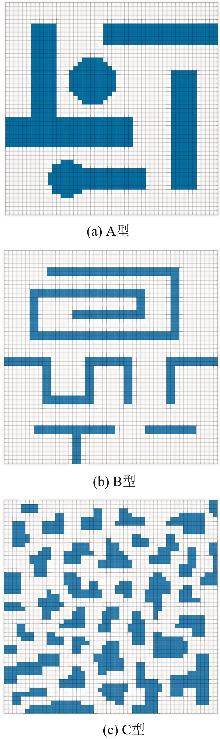
Fig. 11
Three different types of simulation maps
Table 3
Experimental results of five algorithms on three maps
| 地图 | 算法 | A* | JPS | REA* | SBREA* | 改进REA* |
|---|---|---|---|---|---|---|
| A型 | 平均搜索时间/s | 2.74 | 0.14 | 0.06 | 0.27 | 0.11 |
| 路径长度/m | 98.63 | 93.11 | 96.29 | 94.48 | 87.84 | |
| 扩展次数 | 559 | 31 | 32 | 25 | 19 | |
| 转向角度和/(˚) | 900.00 | 675.00 | 510.26 | 531.08 | 338.40 | |
| 转角数 | 19 | 15 | 12 | 12 | 10 | |
| 相对平滑度 | 1.00 | 1.33 | 1.76 | 1.69 | 2.66 | |
| B型 | 平均搜索时间/s | 5.10 | 0.14 | 0.04 | 0.21 | 0.09 |
| 路径长度/m | 168.47 | 146.28 | 150.25 | 166.78 | 148.98 | |
| 扩展次数 | 1 075 | 31 | 21 | 18 | 13 | |
| 转向角度和/(˚) | 2 070.00 | 945.00 | 852.97 | 908.08 | 858.17 | |
| 转角数 | 43 | 21 | 11 | 13 | 11 | |
| 相对平滑度 | 1.00 | 2.19 | 2.43 | 2.28 | 2.41 | |
| C型 | 平均搜索时间/s | 1.19 | 0.19 | 0.08 | 0.27 | 0.12 |
| 路径长度/m | 236 | 47 | 39 | 23 | 25 | |
| 扩展次数 | 66.50 | 64.25 | 71.97 | 64.17 | 64.06 | |
| 转向角度和/(˚) | 1 305.00 | 675.00 | 1 014.60 | 423.11 | 670.19 | |
| 转角数 | 26 | 15 | 27 | 20 | 23 | |
| 相对平滑度 | 1.00 | 1.93 | 1.29 | 3.08 | 1.95 |
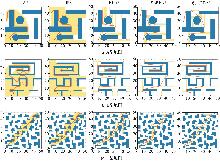
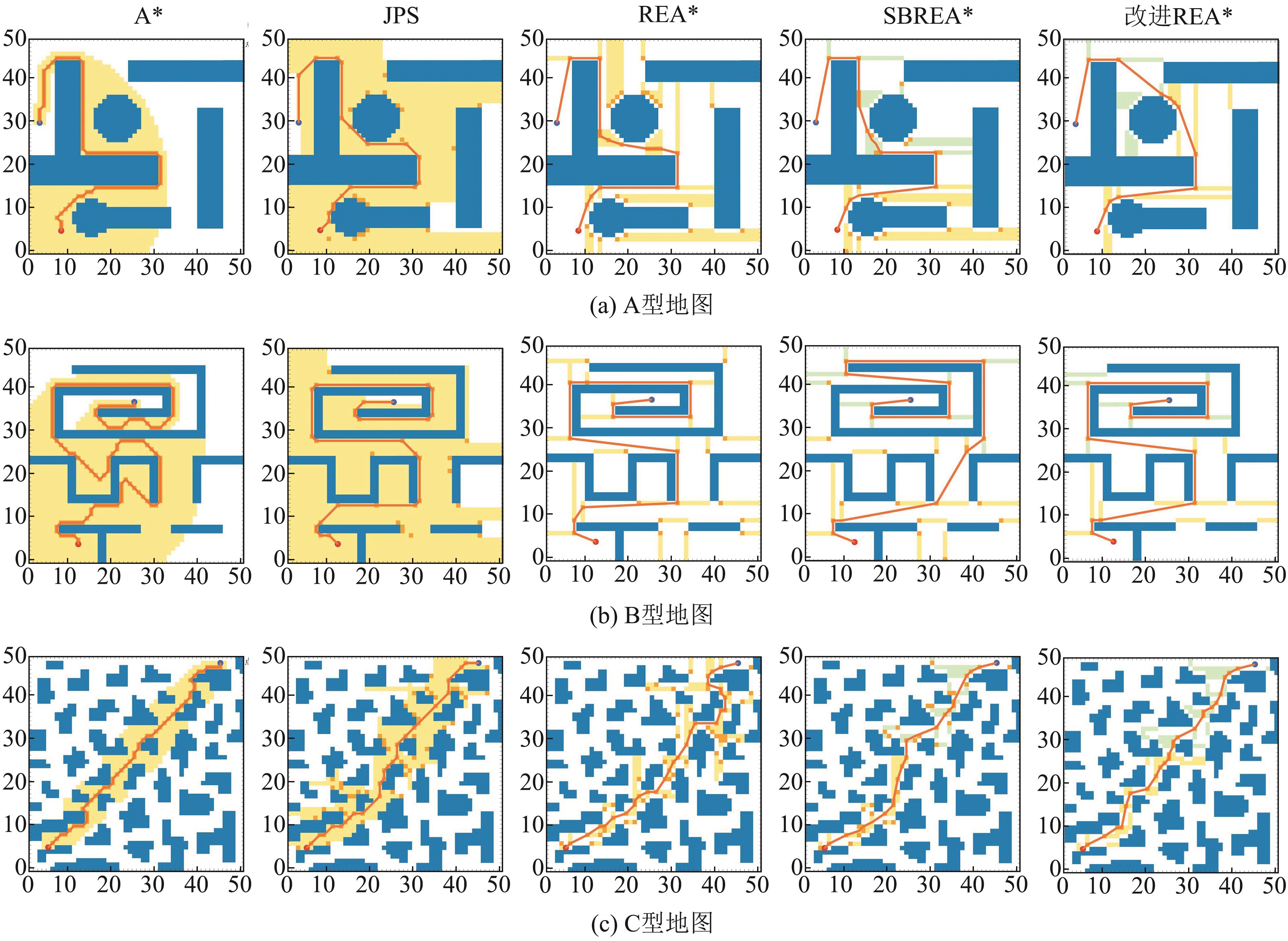
Fig. 12
Path planning of five different algorithms under three types of maps
| [1] | Liu Lixing, Wang Xu, Yang Xin, et al. Path Planning Techniques for Mobile Robots: Review and Prospect[J]. Expert Systems with Applications, 2023, 227: 120254. |
| [2] | Li Haodong, Zhao Tao, Songyi Dian. Forward Search Optimization and Subgoal-based Hybrid Path Planning to Shorten and Smooth Global Path for Mobile Robots[J]. Knowledge-Based Systems, 2022, 258: 110034. |
| [3] | Duraklı Zafer, Nabiyev Vasif. A New Approach Based on Bezier Curves to Solve Path Planning Problems for Mobile Robots[J]. Journal of Computational Science, 2022, 58: 101540. |
| [4] | Feng Haobo, Hu Qiao, Zhao Zhenyi, et al. Smooth Path Planning Under Maximum Curvature Constraints for Autonomous Underwater Vehicles Based on Rapidly-exploring Random Tree Star with B-spline Curves[J]. Engineering Applications of Artificial Intelligence, 2024, 133, Part F: 108583. |
| [5] | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26 |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| [6] | Ye Lei, Wu Fengyun, Zou Xiangjun, et al. Path Planning for Mobile Robots in Unstructured Orchard Environments: An Improved Kinematically Constrained Bi-directional RRT Approach[J]. Computers and Electronics in Agriculture, 2023, 215: 108453. |
| [7] | Chen Xinqiang, Liu Shuhao, Zhao Jiansen, et al. Autonomous Port Management Based AGV Path Planning and Optimization Via an Ensemble Reinforcement Learning Framework[J]. Ocean & Coastal Management, 2024, 251: 107087. |
| [8] | 张瑞, 周丽, 刘正洋. 融合RRT*与DWA算法的移动机器人动态路径规划[J]. 系统仿真学报, 2024, 36(4): 957-968. |
| Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach[J]. Journal of System Simulation, 2024, 36(4): 957-968. | |
| [9] | Sun Yuekun, Tong Xiaochong, Lei Yi, et al. A Multi-scale Path-planning Method for Large-scale Scenes Based on a Framed Scale-elastic Grid Map[J]. International Journal of Digital Earth, 2024, 17(1): 2383852. |
| [10] | Huang Chen, Zhou Xiangbing, Ran Xiaojuan, et al. Adaptive Cylinder Vector Particle Swarm Optimization with Differential Evolution for UAV Path Planning[J]. Engineering Applications of Artificial Intelligence, 2023, 121: 105942. |
| [11] | Zhang Jie, Chen Dugui, Han Guangjie, et al. Formation Path Planning for Collaborative Autonomous Underwater Vehicles Based on Consensus-sparrow Search Algorithm[J]. IEEE Internet of Things Journal, 2024, 11(8): 13810-13823. |
| [12] | Zhang Shuai, Yu Deshen, Sang Hongqiang, et al. A New Hybrid Path Planning Method for the Sailboat Architecture Wave Glider in the Wind Field Environment[J]. Ocean Engineering, 2023, 283: 115153. |
| [13] | Dai Jun, Zhang Yi, Deng Hua. Novel Potential Guided Bidirectional RRT* with Direct Connection Strategy for Path Planning of Redundant Robot Manipulators in Joint Space[J]. IEEE Transactions on Industrial Electronics, 2024, 71(3): 2737-2747. |
| [14] | Li Changgeng, Huang Xia, Ding Jun, et al. Global Path Planning Based on a Bidirectional Alternating Search A* Algorithm for Mobile Robots[J]. Computers & Industrial Engineering, 2022, 168: 108123. |
| [15] | Yu Jiabin, Yang Meng, Zhao Zhiyao, et al. Path Planning of Unmanned Surface Vessel in an Unknown Environment Based on Improved D* Lite Algorithm[J]. Ocean Engineering, 2022, 266, Part 3: 112873. |
| [16] | Zhang An, Li Chong, Bi Wenhao. Rectangle Expansion A∗ Pathfinding for Grid Maps[J]. Chinese Journal of Aeronautics, 2016, 29(5): 1385-1396. |
| [17] | Xu Xing, Zeng Jiazhu, Zhao Yun, et al. Research on Global Path Planning Algorithm for Mobile Robots Based on Improved A* [J]. Expert Systems with Applications, 2024, 243: 122922. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [6] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [7] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [8] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [9] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [10] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [11] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [12] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [13] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [14] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [15] | He Zhigang, Li Dayan, Wang Niya, Mao Jianlin, Wang Ning. A Multi-robot Collaborative Path Planning Algorithm with Chain Working Mode [J]. Journal of System Simulation, 2025, 37(4): 953-967. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
