

Journal of System Simulation ›› 2026, Vol. 38 ›› Issue (1): 14-28.doi: 10.16182/j.issn1004731x.joss.25-0214
• Papers • Previous Articles Next Articles
Zhou Jiarui1, Cui Haihua1, Li Pengcheng1, Gu Shihao1, Hao Huipu1, Zhao Xifu1, Zhao Anan1, Jiang Tao2
Received:2025-03-20
Revised:2025-04-24
Online:2026-01-18
Published:2026-01-28
Contact:
Cui Haihua
CLC Number:
Zhou Jiarui, Cui Haihua, Li Pengcheng, Gu Shihao, Hao Huipu, Zhao Xifu, Zhao Anan, Jiang Tao. 3D Object Tracking Registration Based on Improved RBOT Method[J]. Journal of System Simulation, 2026, 38(1): 14-28.
Fig. 1
Overview of attitude estimation
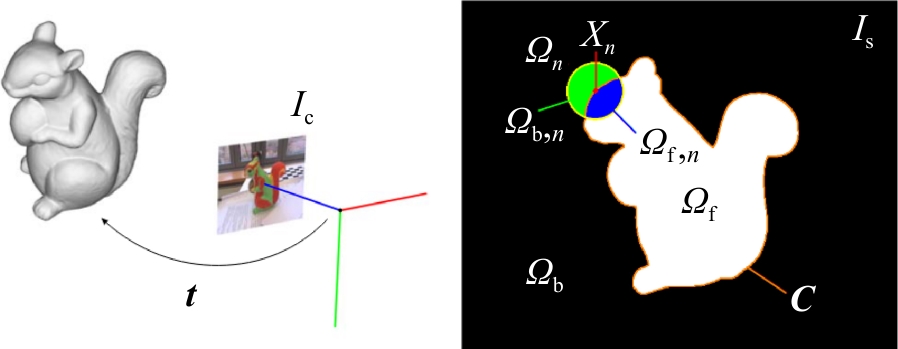
Fig. 2
Binarization results
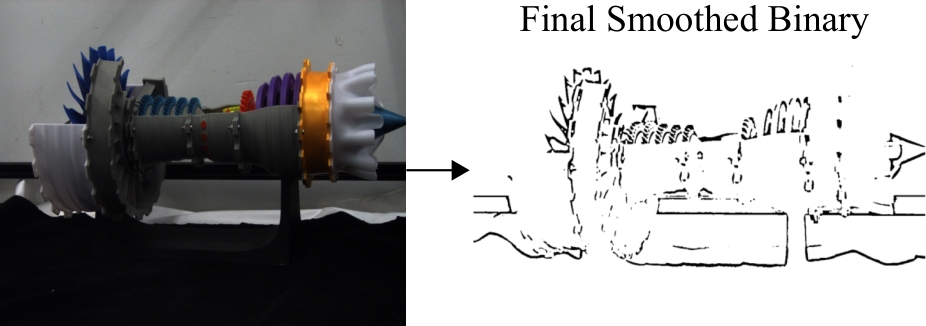

Fig. 3
Scene processing

Fig. 4
Experiment process
Table 1
Evaluation of the initial positional accuracy of the two methods
| 方法 | 平均运行时间/ms | 旋转误差/(°) | 平移误差/mm | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| RBOT | 82.81 | 2.01 | 1.10 | 6.04 | 2.86 |
| 改进RBOT | 86.02 | 1.33 | 0.80 | 4.99 | 2.14 |
Fig. 5
Initial position matching process position error
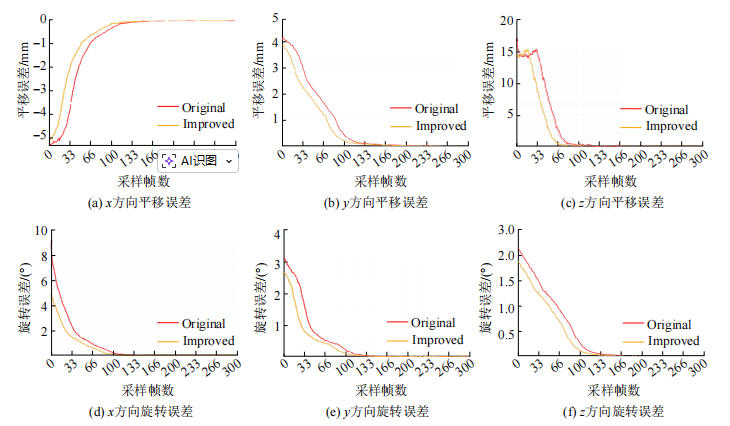

Fig. 6
Schematic diagram of light brightness change
Table 2
Evaluation of initial positional accuracy of two methods under illumination brightening
| 方法 | 平均运行时间/ms | 旋转误差/(°) | 平移误差/mm | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| RBOT | 82.54 | 2.71 | 1.65 | 6.08 | 4.46 |
| 改进RBOT | 85.47 | 2.56 | 1.53 | 5.81 | 4.25 |

Fig. 7
Positioning error of the initial position matching process of the two methods under illumination
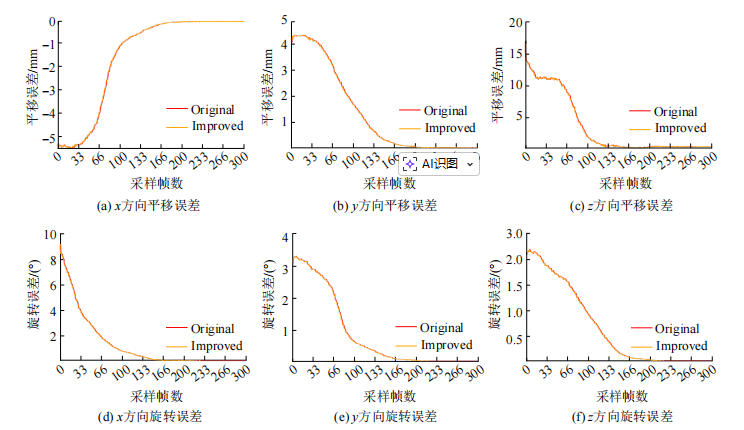
Table 3
Evaluation of the initial positional accuracy of the two methods under illumination darkening
| 方法 | 平均运行时间/ms | 旋转误差/(°) | 平移误差/mm | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| RBOT | 80.14 | 3.35 | 2.37 | 5.72 | 4.57 |
| 改进RBOT | 86.09 | 3.30 | 2.33 | 5.62 | 4.49 |
Fig. 8
Positioning error of the initial position matching process of the two methods under illumination darkening
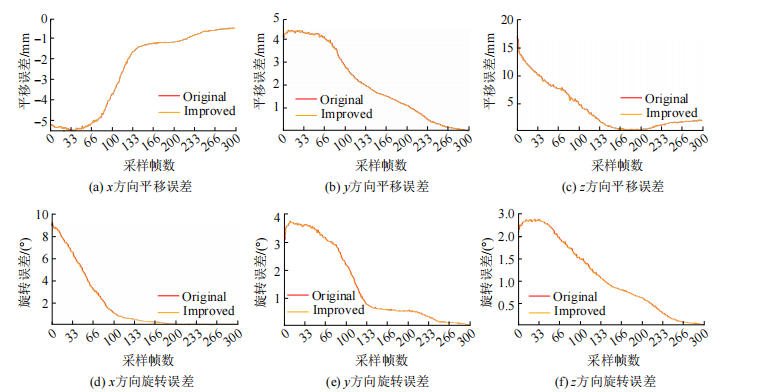
Table 4
Evaluation of the static tracking process accuracy of the two methods under constant illumination
| 方法 | 位移抖动/% | 旋转误差/(°) | 平移误差/mm | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| RBOT | 0.03 | 0.41 | 0.42 | 0.14 | 0.15 |
| 改进RBOT | 0.02 | 0.34 | 0.34 | 0.13 | 0.14 |

Fig. 9
Comparison of the two methods of continuous frame position error under constant light

Fig. 10
Comparison of the position error of two methods in successive frames under illumination

Fig. 11
Comparison of the position error of two methods in successive frames under illumination darkening
Table 5
Evaluation of the static tracking process accuracy of the two methods under illumination brightening
| 方法 | 位移抖动/% | 旋转误差/(°) | 平移误差/mm | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| RBOT | 0.34 | 0.10 | 0.13 | 1.65 | 1.65 |
| 改进RBOT | 0.34 | 0.11 | 0.13 | 1.66 | 1.65 |
Table 6
Evaluation of the static tracking process accuracy of the two methods under illumination darkening
| 方法 | 位移抖动/% | 旋转误差/(°) | 平移误差/mm | ||
|---|---|---|---|---|---|
| RMSE | MAE | RMSE | MAE | ||
| RBOT | 0.21 | 0.65 | 0.63 | 1.04 | 1.03 |
| 改进RBOT | 0.18 | 0.63 | 0.63 | 0.90 | 0.87 |
| [1] | 侯廷红, 周平, 何黎明, 等. 航空发动机维修技术进展与展望[J]. 航空工程进展, 2023, 14(5): 29-34, 60. |
| Hou Tinghong, Zhou Ping, He Liming, et al. Research Progress and Prospect of Aero-engine Maintenance Technology[J]. Advances in Aeronautical Science and Engineering, 2023, 14(5): 29-34, 60. | |
| [2] | 魏禛, 郭宇, 汤鹏洲, 等. 增强现实在复杂产品装配领域的关键技术研究与应用综述[J]. 计算机集成制造系统, 2022, 28(3): 649-662. |
| Wei Zhen, Guo Yu, Tang Pengzhou, et al. A Review of Key Technology Research and Application of Augmented Reality in Complex Product Assembly[J]. Computer Integrated Manufacturing Systems, 2022, 28(3): 649-662. | |
| [3] | 王群淼. 增强现实技术及其在航空发动机维修中的应用研究[J]. 内燃机与配件, 2020(22): 159-160. |
| Wang Qunmiao. Research on Augmented Reality Technology and its Application in Aeroengine Maintenance[J]. Internal Combustion Engine & Parts, 2020(22): 159-160. | |
| [4] | 刘远, 孟少华, 陈畅宇, 等. 增强现实技术最新研究进展及航空航天领域应用[J]. 计算机与数字工程, 2023, 51(1): 125-132. |
| Liu Yuan, Meng Shaohua, Chen Changyu, et al. Research on the Latest Progress Augmented Reality Technology and its Application in Aerospace[J]. Computer & Digital Engineering, 2023, 51(1): 125-132. | |
| [5] | Serván J, Mas F, Menéndez J L, et al. Using Augmented Reality in Airbus A400M Shop Floor Assembly Work Instructions[J]. AIP Conference Proceedings, 2012, 1431(1): 633-640. |
| [6] | 梅英杰, 王大伟, 孙传智, 等. 基于增强现实的航空发动机机匣数字孪生测调系统[J]. 航空学报, 2024, 45(21): 80-92. |
| Mei Yingjie, Wang Dawei, Sun Chuanzhi, et al. A Digital Twin Testing and Adjusting System for Aero-engine Casings Based on Augmented Reality[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(21): 80-92. | |
| [7] | 敖良忠, 吴梓祺. 基于混合现实的发动机维修培训系统[J]. 中国民航飞行学院学报, 2023, 34(2): 53-56. |
| Ao Liangzhong, Wu Ziqi. Mixed Reality-based Aero-engine Maintenance Training System[J]. Journal of Civil Aviation Flight University of China, 2023, 34(2): 53-56. | |
| [8] | 方维, 许澍虹, 韩磊, 等. AR增强装配中的跟踪注册方法研究与应用进展[J]. 系统仿真学报, 2023, 35(7): 1438-1454. |
| Fang Wei, Xu Shuhong, Han Lei, et al. Research and Application Progress of Tracking Registration Methods in AR Assembly[J]. Journal of System Simulation, 2023, 35(7): 1438-1454. | |
| [9] | 李峰. 基于视觉的增强现实三维注册技术研究[D]. 唐山: 华北理工大学, 2022. |
| Li Feng. Research on Augmented Reality 3D Registration Technology Based on Vison[D]. Tangshan: North China University of Science and Technology, 2022. | |
| [10] | Schmaltz C, Rosenhahn B, BROX T, et al. Region-based Pose Tracking[C]//Proceedings of the 3rd Iberian conference on Pattern Recognition and Image Analysis, Part II. Heidelberg : Springer-Verlag, 2007: 56-63. |
| [11] | Rosenhahn B, Brox T, Weickert J. Three-Dimensional Shape Knowledge for Joint Image Segmentation and Pose Tracking[J]. International Journal of Computer Vision, 2007, 73(3): 243-262. |
| [12] | Kass M, Witkin A, Terzopoulos D. Snakes: Active Contour Models[J]. International Journal of Computer Vision, 1988, 1(4): 321-331. |
| [13] | Prisacariu V A, Reid I D. PWP3D: Real-time Segmentation and Tracking of 3D Objects[J]. International Journal of Computer Vision, 2012, 98(3): 335-354. |
| [14] | Tjaden H, Schwanecke U, Schömer E. Real-time Monocular Segmentation and Pose Tracking of Multiple Objects[C]//Computer Vision – ECCV 2016. Cham: Springer International Publishing, 2016: 423-438. |
| [15] | Tjaden H, Schwanecke U, Schömer E. Real-time Monocular Pose Estimation of 3D Objects Using Temporally Consistent Local Color Histograms[C]//2017 IEEE International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2017: 124-132. |
| [16] | Tjaden H, Schwanecke U, Schömer E, et al. A Region-Based Gauss-newton Approach to Real-time Monocular Multiple Object Tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2019, 41(8): 1797-1812. |
| [17] | Zhong Leisheng, Zhao Xiaolin, Zhang Yu, et al. Occlusion-aware Region-based 3D Pose Tracking of Objects with Temporally Consistent Polar-based Local Partitioning[J]. IEEE Transactions on Image Processing, 2020, 29: 5065-5078. |
| [18] | 黄鸿, 钟凡, 秦学英. 基于时间一致性局部颜色特征的无纹理3D物体实时跟踪[J]. 计算机辅助设计与图形学学报, 2020, 32(1): 99-111. |
| Huang Hong, Zhong Fan, Qin Xueying. Real-time Textureless 3D Object Tracking Based on Temporally Consistent Local Color Feature[J]. Journal of Computer-aided Design & Computer Graphics, 2020, 32(1): 99-111. | |
| [19] | Stoiber M, Pfanne M, Strobl K H, et al. SRT3D: A Sparse Region-based 3D Object Tracking Approach for the Real World[J]. International Journal of Computer Vision, 2022, 130(4): 1008-1030. |
| [20] | Stoiber M, Sundermeyer M, Triebel R. Iterative Corresponding Geometry: Fusing Region and Depth for Highly Efficient 3D Tracking of Textureless Objects[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2022: 6845-6855. |
| [21] | Stoiber M, Elsayed M, Reichert A E, et al. Fusing Visual Appearance and Geometry for Multi-modality 6DoF Object Tracking[C]//2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2023: 1170-1177. |
| [22] | 徐一成, 里鹏, 李帅, 等. 基于区域的弱纹理零件三维跟踪方法[J]. 计算机集成制造系统, 2024, 30(12): 4246-4258. |
| Xu Yicheng, Li Peng, Li Shuai, et al. Region-based 3D Tracking Method for Textureless Parts[J]. Computer Integrated Manufacturing Systems, 2024, 30(12): 4246-4258. | |
| [23] | Lowe D G. Robust Model-based Motion Tracking Through the Integration of Search and Estimation[J]. International Journal of Computer Vision, 1992, 8(2): 113-122. |
| [24] | Harris C, Stennett C. RAPID - A Video Rate Object Tracker[C]//Proceedings of the British Machine Vision Conference. Durham: BMVA Press, 1990: 15.1-15.6. |
| [25] | Dong Yanchao, Ji Lingling, Wang Senbo, et al. Accurate 6DOF Pose Tracking for Texture-less Objects[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 31(5): 1834-1848. |
| [26] | Tian Xuhui, Lin Xinran, Zhong Fan, et al. Large-displacement 3D Object Tracking with Hybrid Non-local Optimization[C]//Computer Vision – ECCV 2022. Cham: Springer Nature Switzerland, 2022: 627-643. |
| [1] | Qin Lang, Xie Jiacheng, Qiao Xiaojun, Wang Xuewen, Xiao Zhijie. Robot Trajectory Planning and Adjustment Method for Abnormal Pose of Actuator [J]. Journal of System Simulation, 2026, 38(5): 1466-1483. |
| [2] | Li Pengfei, Xu Wei, Piao Yongjie, Fang Yinghong, Shi Dunpan. Digital Imaging Simulation of Complex Scene of Space-based Space Small Target [J]. Journal of System Simulation, 2025, 37(9): 2315-2334. |
| [3] | Liu Jia, Zhang Zengwei, Chen Dapeng, Huang Nanxuan, Wang Bin, Song Hong. Improvement of SLAM Localization Accuracy in AR by Enhancing YOLOv8 [J]. Journal of System Simulation, 2025, 37(11): 2701-2713. |
| [4] | Hu Yan, Chen Lizhe, Xie Hanna, Ge Yuyao, Zhou Shun, Cai Xingquan. Real-time Non-photorealistic Rendering Method for Black and White Comic Style in Games and Animation [J]. Journal of System Simulation, 2024, 36(7): 1699-1712. |
| [5] | Liu Wanjun, Cheng Yuqian, Qu Haicheng. Image Self-enhancement De-hazing Algorithm Combined with Generative Adversarial Network [J]. Journal of System Simulation, 2024, 36(5): 1093-1106. |
| [6] | Wei Fang, Shuhong Xu, Lei Han, Zhangwenchi Li. Research and Application Progress of Tracking Registration Methods in AR Assembly [J]. Journal of System Simulation, 2023, 35(7): 1438-1454. |
| [7] | Songming Jiao, Hui Ding, Yufei Zhong, Xin Yao, Jiahao Zheng. A UAV Target Tracking and Control Algorithm Based on SiamRPN [J]. Journal of System Simulation, 2023, 35(6): 1372-1380. |
| [8] | Yiling Sun, Yi Chen, Guihua Shan, Xiaoxing Li. Multi-person Interactive Globe System Based on AR Technology [J]. Journal of System Simulation, 2022, 34(6): 1367-1374. |
| [9] | Bingan Yuan, Mingen Zhong, Jingxin Ni. Research on Visual Inspection Algorithm of Crimping Appearance Defects for Wiring Harness Terminals [J]. Journal of System Simulation, 2022, 34(5): 1152-1159. |
| [10] | Qizong Shen, Chunyan Gao. Research on Semantic Segmentation of Natural Landform Based on Edge Detection Module [J]. Journal of System Simulation, 2022, 34(2): 293-302. |
| [11] | Hou Shouming, Ge Qian, Liu Yanyan. Research on Digital Protection System of Intangible Cultural Heritage Based on Mobile Augmented Reality Technology [J]. Journal of System Simulation, 2021, 33(6): 1334-1341. |
| [12] | Wei Shisong, Zhou Zhengdong, Zhang Xuling, Mao Ling, Jia Junshan, Liu Chuanle. Virtual Training System for Spacecraft Maintenance Based on Desktop Virtual Reality [J]. Journal of System Simulation, 2021, 33(6): 1358-1363. |
| [13] | Yu Tiantian, Wang Xiaoping, Li Weiqing, Su Zhiyong. Research on Virtual Avatar Position and Orientation Technology for Augmented Reality Virtual Sandbox [J]. Journal of System Simulation, 2021, 33(2): 324-330. |
| [14] | Wang Qiang, Fan Xiumin, He Qichang, Zhu Wenmin. AR-based Simulation Interaction and Human Factor Assessment for Human Robot Cooperation Assembly Planning [J]. Journal of System Simulation, 2021, 33(2): 389-400. |
| [15] | Deng Chen, You Xiong, Zhi Meixia. Evaluation on Geo-registration Accuracy of Outdoor Augmented Reality [J]. Journal of System Simulation, 2020, 32(9): 1693-1704. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
