

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (5): 1280-1289.doi: 10.16182/j.issn1004731x.joss.24-0010
• Papers • Previous Articles Next Articles
Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao
Received:2024-01-04
Revised:2024-03-26
Online:2025-05-20
Published:2025-05-23
Contact:
Li Yanqiang
CLC Number:
Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information[J]. Journal of System Simulation, 2025, 37(5): 1280-1289.
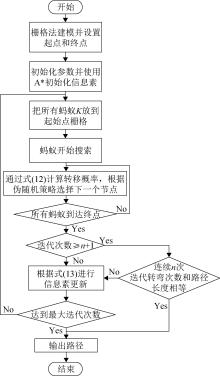
Fig. 1
Flowchart of improved Ant conlony algorithm
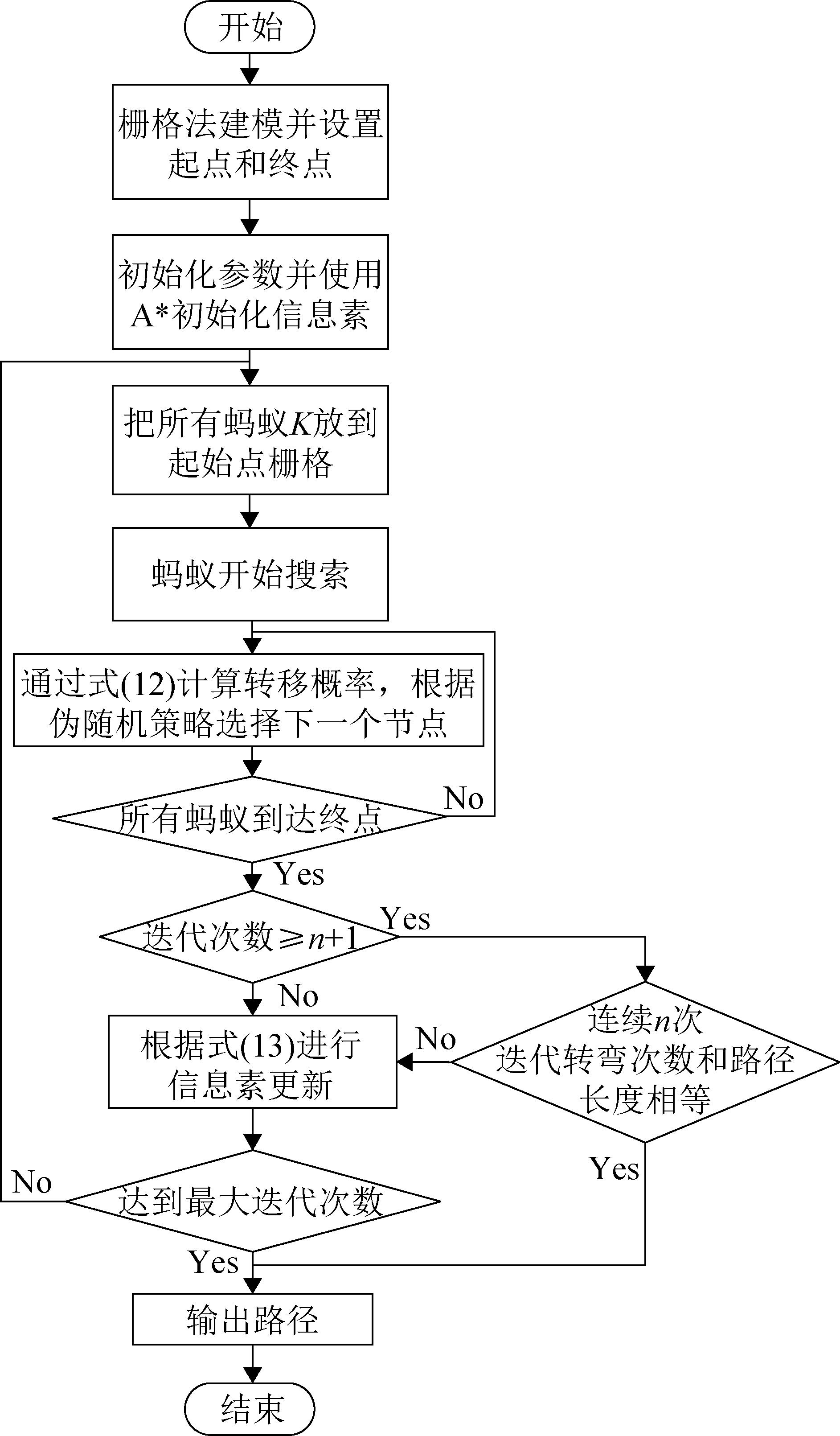
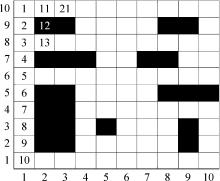
Fig. 2
10×10 raster map
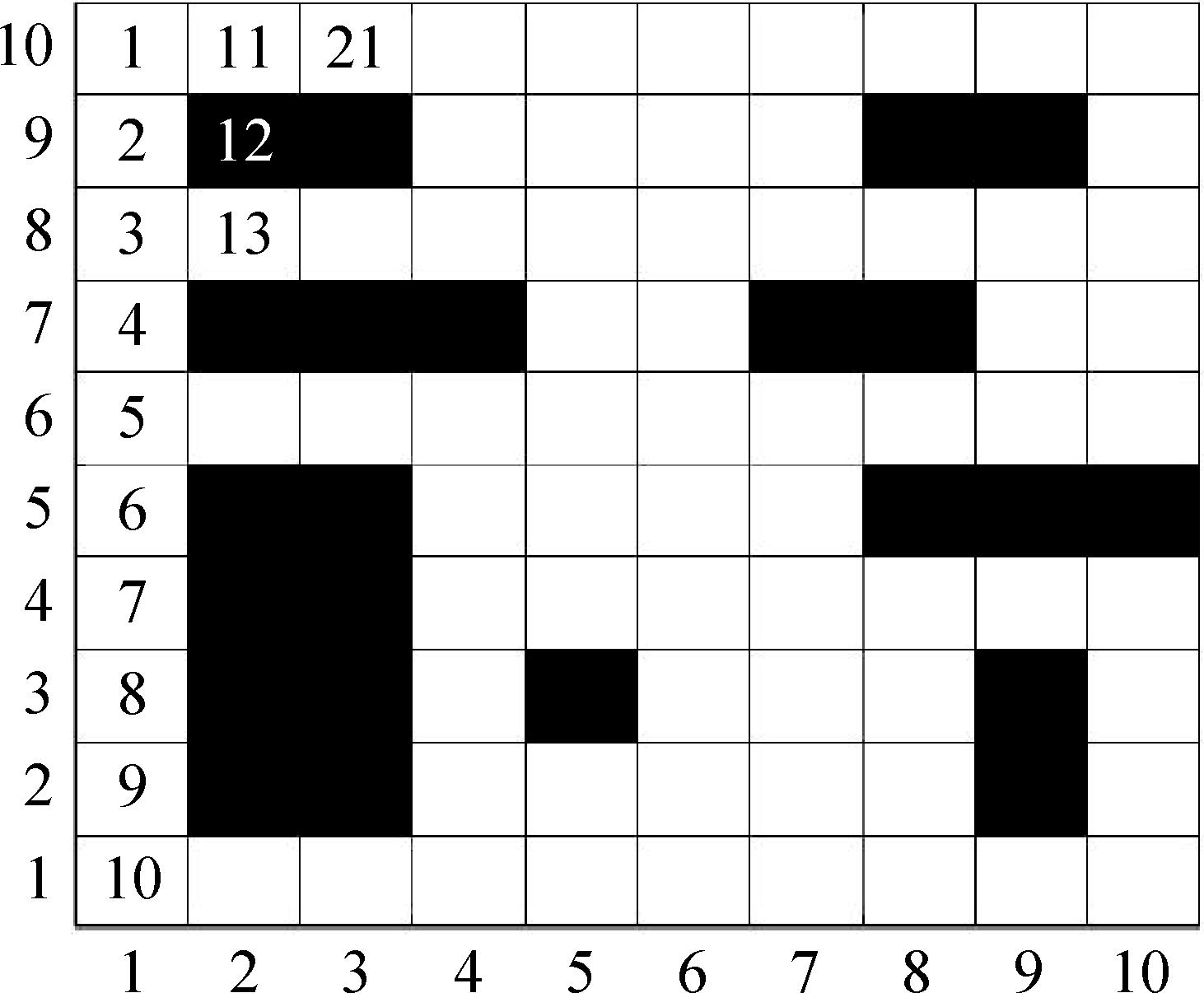
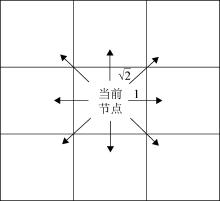
Fig. 3
Direction of node path selection
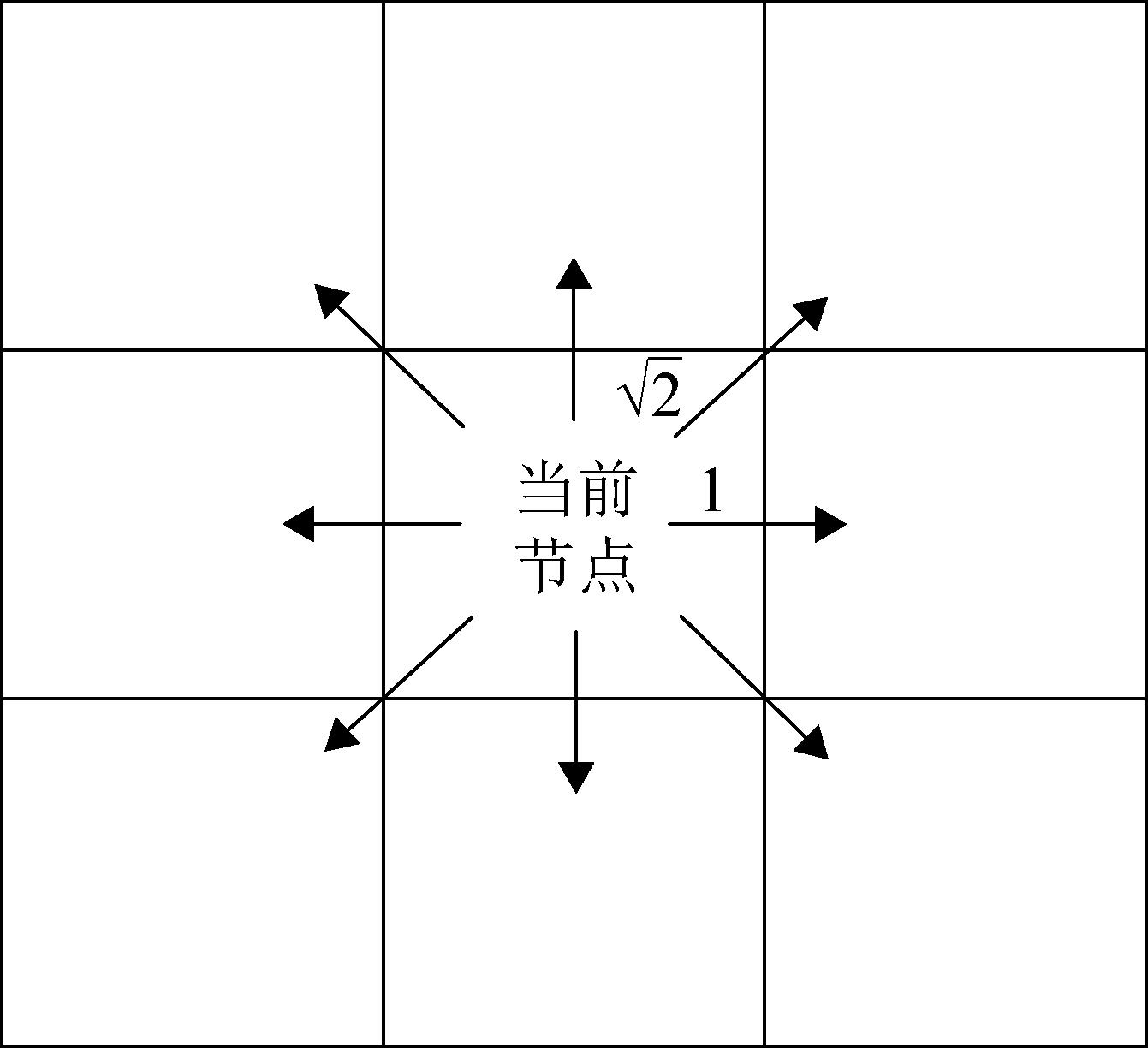
Fig. 4
Path walking diagram
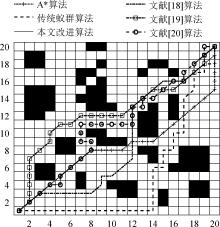
Fig. 5
20×20 raster path planning
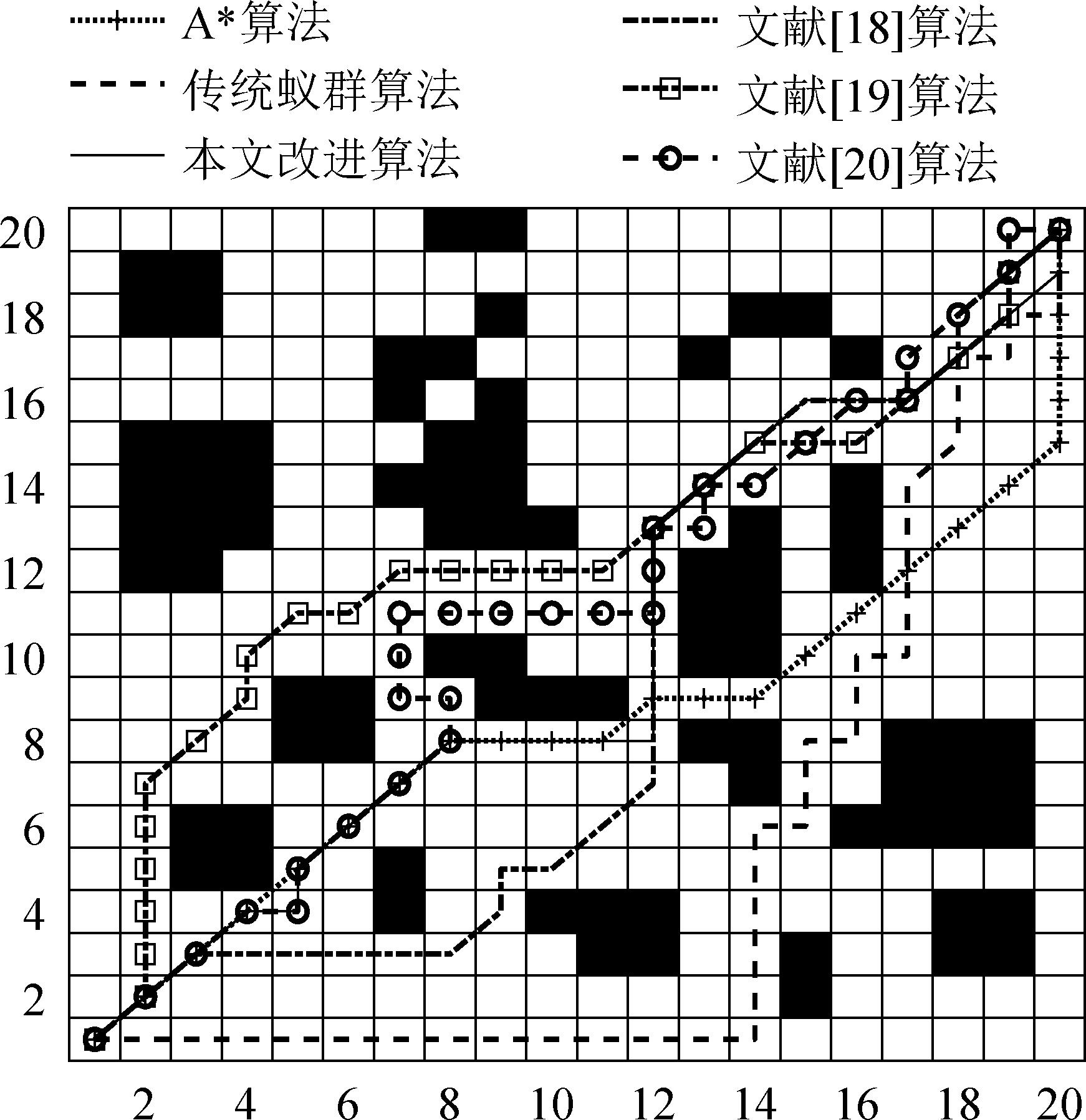
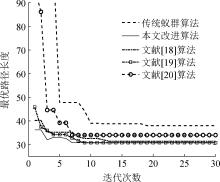
Fig. 6
Path Length convergence curves
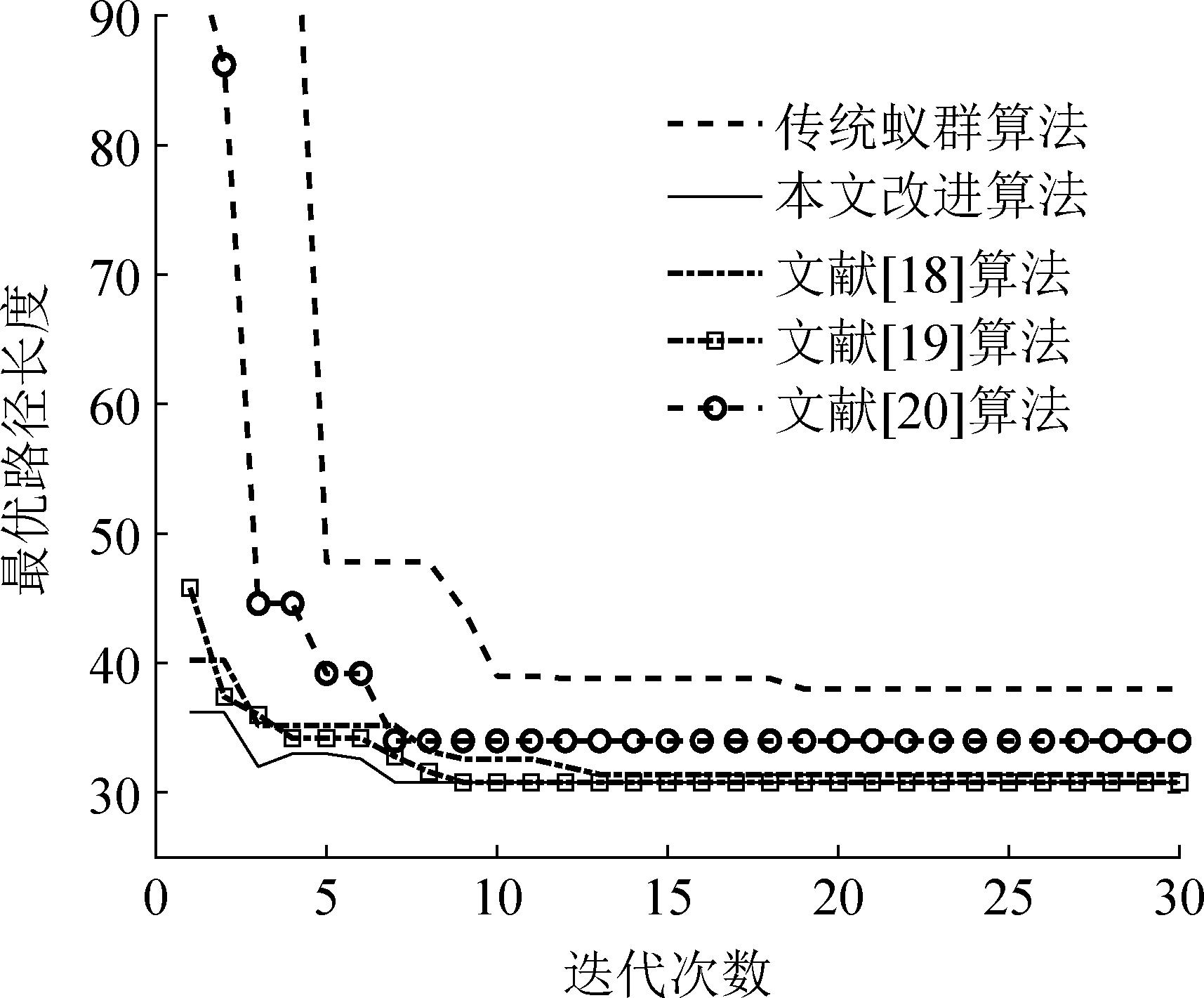
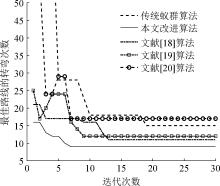
Fig. 7
Convergence curves for the number of turns
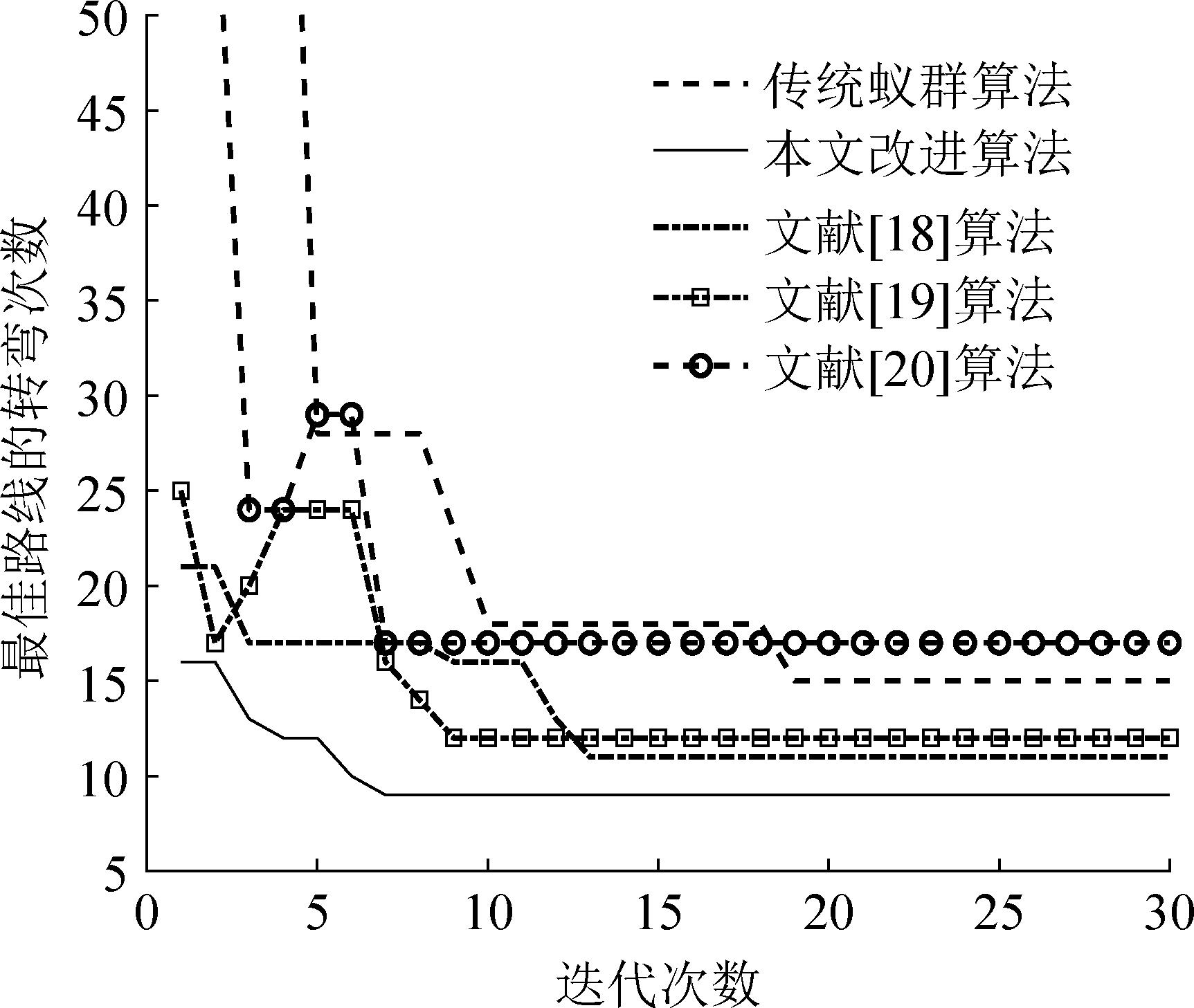
Table 1
Comparison of experimental results in a 20×20 grid environment
| 算法 | 最优路径 长度 | 最优转弯次数 | 迭代 次数 | 平均 时间/s |
|---|---|---|---|---|
| 传统蚁群算法 | 38 | 15 | 19 | 3.02 |
| 本文改进算法 | 30.8 | 9 | 7 | 1.09 |
| 文献[ | 31.4 | 11 | 13 | 2.43 |
| 文献[ | 30.8 | 12 | 9 | 1.12 |
| 文献[ | 34 | 17 | 7 | 4.19 |
Fig. 8
30×30 raster path planning
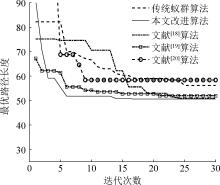
Fig. 9
Path iteration convergence curve

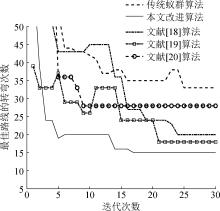
Fig. 10
Iterative convergence curves for the number of turns
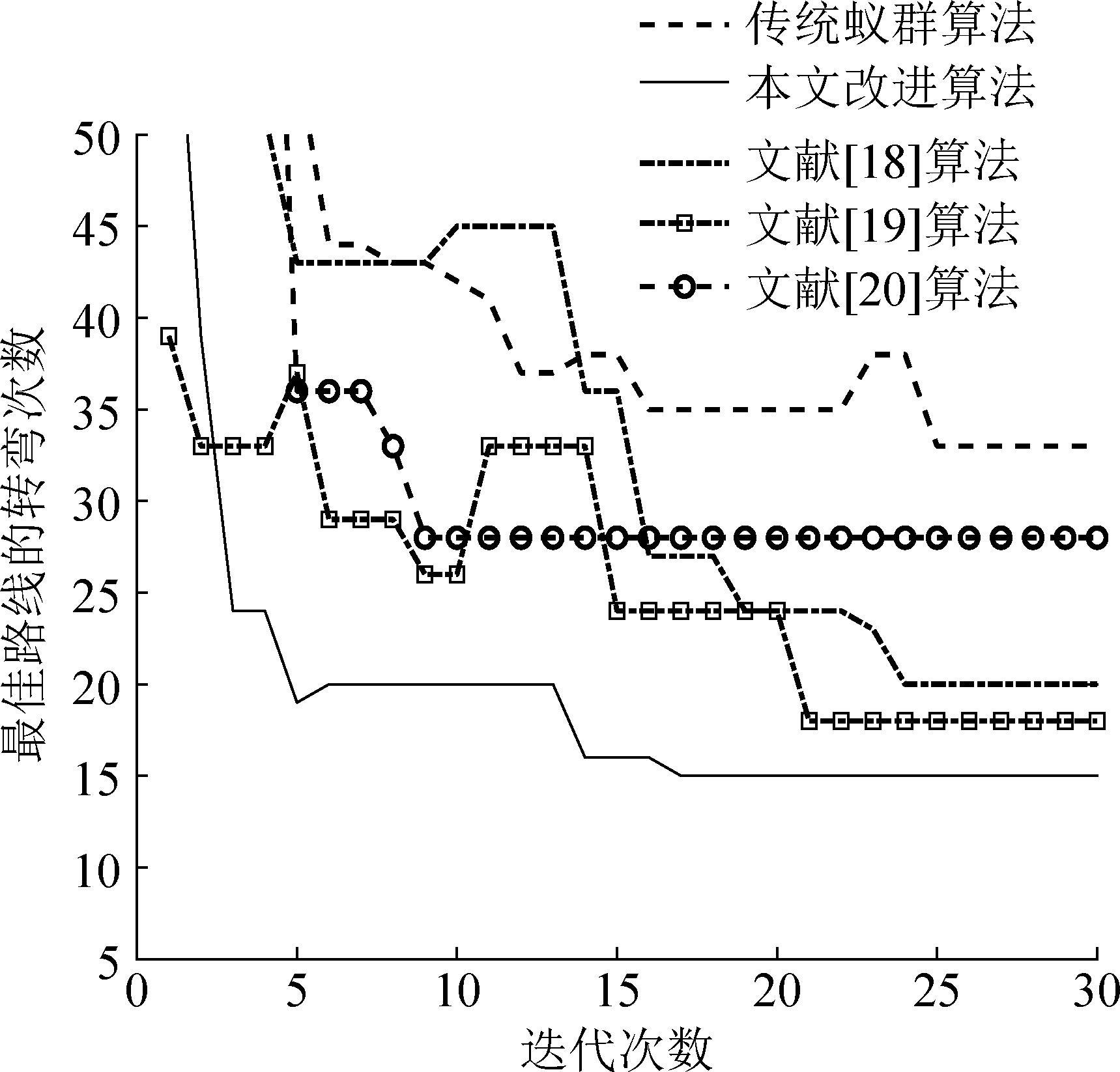
Table 2
Comparison of experimental results of different algorithms
| 算法 | 最优路径 长度 | 最优转弯次数 | 迭代 次数 | 平均 时间/s |
|---|---|---|---|---|
| 传统蚁群算法 | 56.2 | 33 | 25 | 4.38 |
| 本文改进算法 | 50.6 | 15 | 17 | 2.02 |
| 文献[ | 51 | 20 | 24 | 3.43 |
| 文献[ | 52 | 18 | 21 | 2.36 |
| 文献[ | 58.4 | 28 | 9 | 5.86 |
| 1 | 郑文赢. 移动机器人技术现状与展望[J]. 信息记录材料, 2020, 21(10): 24-25. |
| 2 | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26. |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| 3 | Fatin Hassan Ajeil, Ibraheem Kasim Ibraheem, Ahmad Taher Azar, et al. Grid-based Mobile Robot Path Planning Using Aging-based Ant Colony Optimization Algorithm in Static and Dynamic Environments[J]. Sensors, 2020, 20(7): 1880. |
| 4 | 蒋美云. 基于初始路径封闭区域的机器人路径规划算法[J]. 计算机应用与软件, 2020, 37(9): 263-267, 301. |
| Jiang Meiyun. Robot Path Planning Algorithm Based on Closed Area of Initial Path[J]. Computer Applications and Software, 2020, 37(9): 263-267, 301. | |
| 5 | 张恒, 何丽, 袁亮, 等. 基于改进双层蚁群算法的移动机器人路径规划[J]. 控制与决策, 2022, 37(2): 303-313. |
| Zhang Heng, He Li, Yuan Liang, et al. Mobile Robot Path Planning Using Improved Double-layer Ant Colony Algorithm[J]. Control and Decision, 2022, 37(2): 303-313. | |
| 6 | Miao Changwei, Chen Guangzhu, Yan Chengliang, et al. Path Planning Optimization of Indoor Mobile Robot Based on Adaptive Ant Colony Algorithm[J]. Computers & Industrial Engineering, 2021, 156: 107230. |
| 7 | 李三平, 袁龙强, 吴立国, 等. 基于改进融合蚁群算法的移动机器人路径规划[J]. 机械设计, 2023, 40(10): 76-84. |
| Li Sanping, Yuan Longqiang, Wu Liguo, et al. Path Planning of Mobile Robot Based on Improved Fusion Ant-colony Algorithm[J]. Journal of Machine Design, 2023, 40(10): 76-84. | |
| 8 | 郝兆明, 安平娟, 李红岩, 等. 增强目标启发信息蚁群算法的移动机器人路径规划[J]. 科学技术与工程, 2023, 23(22): 9585-9591. |
| Hao Zhaoming, An Pingjuan, Li Hongyan, et al. Mobile Robot Path Planning Based on Enhanced Goal Heuristic Information Ant Colony Algorithm[J]. Science Technology and Engineering, 2023, 23(22): 9585-9591. | |
| 9 | Wu Lei, Huang Xiaodong, Cui Junguo, et al. Modified Adaptive Ant Colony Optimization Algorithm and Its Application for Solving Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2023, 215: 119410. |
| 10 | Colorni A, Dorigo M, Maniezzo V, et al. Distributed Optimization by Ant Colonies[C]//Proceedings of ECAL91-European Conference on Artificial Life. 1991, 142: 134-142. |
| 11 | Dorigo M, Gambardella L M. Ant Colony System: A Cooperative Learning Approach to the Traveling Salesman Problem[J]. IEEE Transactions on Evolutionary Computation, 1997, 1(1): 53-66. |
| 12 | 饶鑫. 基于改进蚁群算法的自动驾驶车辆路径规划[D]. 沈阳: 沈阳建筑大学, 2022. |
| Rao Xin. Path Planning of Autonomous Vehicle Based on Improved Ant Colony Algorithm[D]. Shenyang: Shenyang Jianzhu University, 2022. | |
| 13 | Cao Jingang. Robot Global Path Planning Based on an Improved Ant Colony Algorithm[J]. Journal of Computer and Communications, 2016, 4(2): 11-19. |
| 14 | 徐英卓, 李凯, 周俊. 基于改进蚁群算法的钻井救援车辆路径规划[J]. 计算机系统应用, 2022, 31(4): 268-272. |
| Xu Yingzhuo, Li Kai, Zhou Jun. Path Planning of Drilling Rescue Vehicle Based on Improved Ant Colony Algorithm[J]. Computer Systems & Applications, 2022, 31(4): 268-272. | |
| 15 | An Jingxin, Wang Weixin, Liu Zhong, et al. A Route Planning Method Based on the Airspace Divided by Grid Method[J]. Advanced Materials Research, 2014, 1073-1076: 2381-2384. |
| 16 | Kohrt C, Stamp R, Pipe A G, et al. An Online Robot Trajectory Planning and Programming Support System for Industrial Use[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 71-79. |
| 17 | 吴靖宇, 朱世强, 宋伟, 等. 基于改进单元分解法的全覆盖路径规划[J]. 系统工程与电子技术, 2023, 45(12): 3949-3957. |
| Wu Jingyu, Zhu Shiqiang, Song Wei, et al. Coverage Path Planning Based on Improved Cellular Decomposition[J]. Systems Engineering and Electronics, 2023, 45(12): 3949-3957. | |
| 18 | Luo Qiang, Wang Haibao, Zheng Yan, et al. Research on Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Neural Computing and Applications, 2020, 32(6): 1555-1566. |
| 19 | 绳红强, 黄海英, 石小锐, 等. 基于改进蚁群算法的自动驾驶路径规划研究[J]. 机械制造与自动化, 2022, 51(5): 203-206. |
| Sheng Hongqiang, Huang Haiying, Shi Xiaorui, et al. A Research on Path Planning of Automated Driving Based on Improved Ant Colony Algorithm[J]. Machine Building & Automation, 2022, 51(5): 203-206. | |
| 20 | 徐熠. 基于改进蚁群算法的机器人路径规划研究[D]. 北京: 北京化工大学, 2023. |
| Xu Yi. Research on Robot Path Planning Based on Improved Ant Colony Algorithm[D]. Beijing: Beijing University of Chemical Technology, 2023. | |
| 21 | 李理. 多因素蚁群算法的移动机器人路径规划研究[D]. 长沙: 长沙理工大学, 2019. |
| Li Li. Research on Path Planning of Mobile Robot Based on Multi-factor Ant Colony Algorithm[D]. Changsha: Changsha University of Science & Technology, 2019. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [14] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| [15] | He Zhigang, Li Dayan, Wang Niya, Mao Jianlin, Wang Ning. A Multi-robot Collaborative Path Planning Algorithm with Chain Working Mode [J]. Journal of System Simulation, 2025, 37(4): 953-967. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
