

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (3): 742-752.doi: 10.16182/j.issn1004731x.joss.23-1342
• Papers • Previous Articles Next Articles
Bai Yuxin1,2, Chen Zhenya1,2, Shi Ruitao1,2, Su Weitao1,2, Ma Zhuoqiang1,2, Yang Shangjin1,2
Received:2023-11-08
Revised:2023-12-04
Online:2025-03-17
Published:2025-03-21
Contact:
Chen Zhenya
CLC Number:
Bai Yuxin, Chen Zhenya, Shi Ruitao, Su Weitao, Ma Zhuoqiang, Yang Shangjin. Research on Robot Path Planning Based on Improved Harris Hawks Algorithm[J]. Journal of System Simulation, 2025, 37(3): 742-752.

Fig. 1
Comparison of initial population distribution
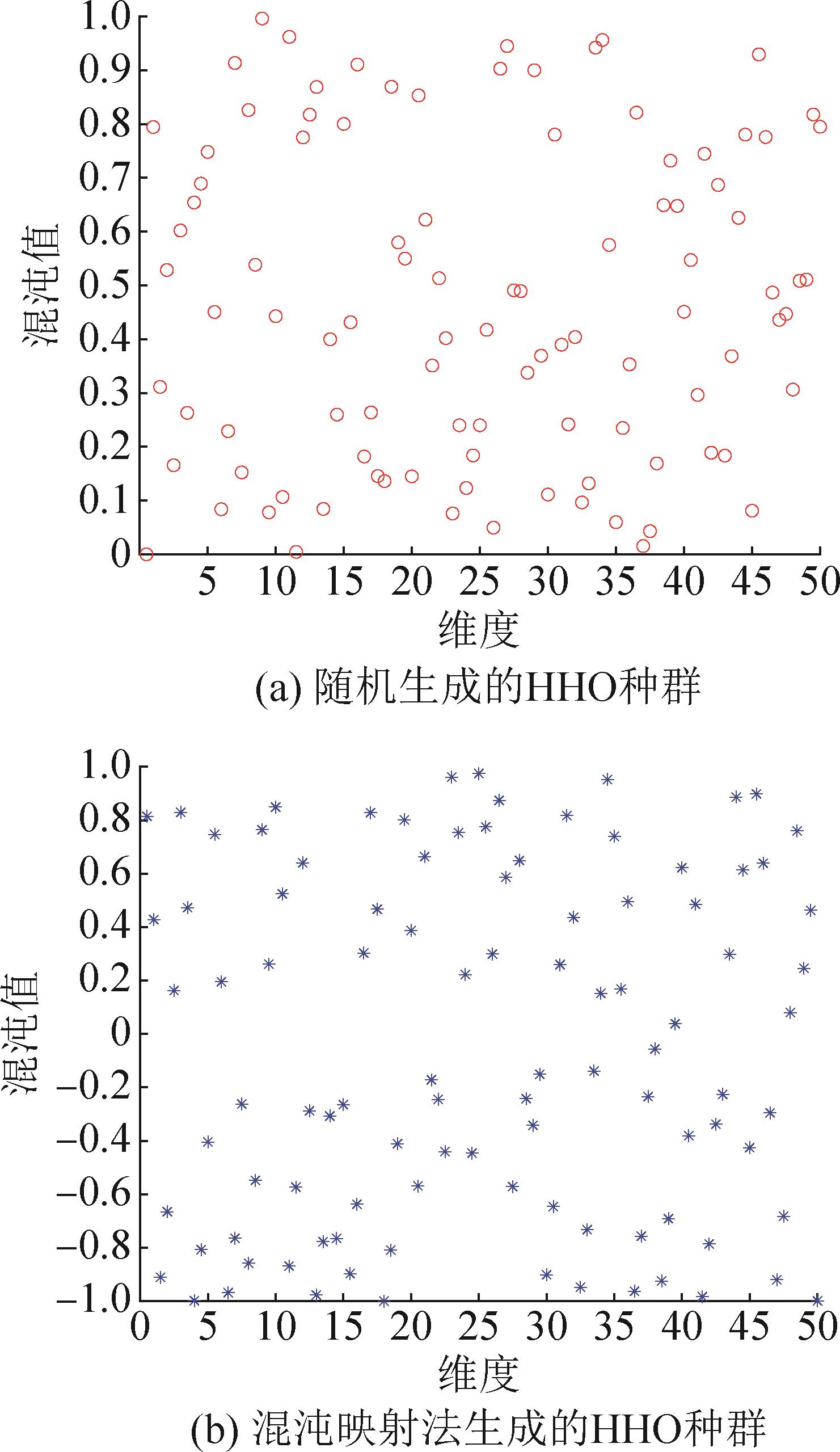

Fig. 2
Escape energy curves
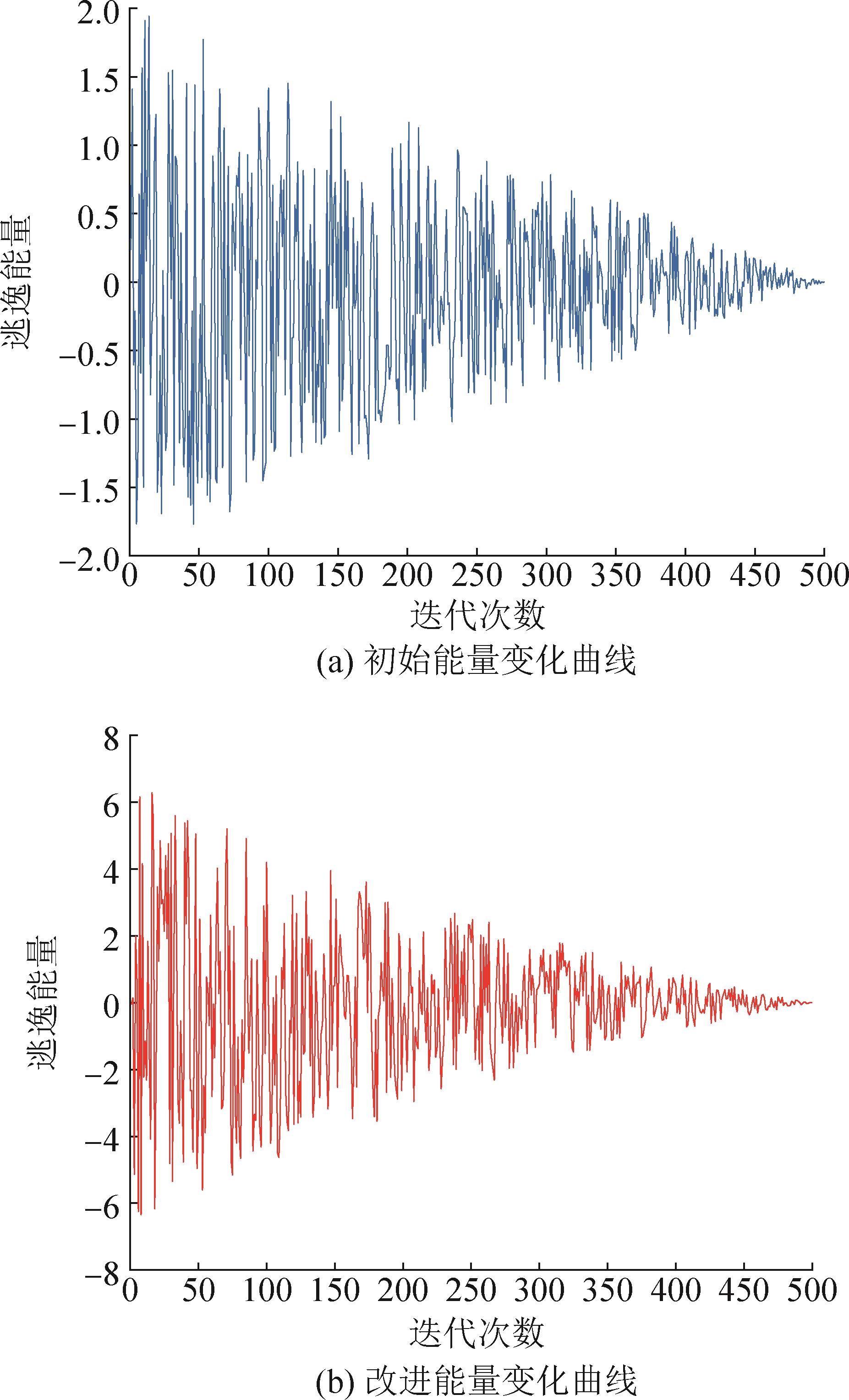
Table 1
Nine test functions
| 函数类别 | 表达式 | 取值范围 |
|---|---|---|
| 单峰测试函数 | (-100,100) | |
| (-100,100) | ||
| (-30,30) | ||
| 多峰测试函数 | (-100,100) | |
| (-10,10) | ||
| (-100,100) | ||
| 固定维多峰测试函数 | (-65.536,65.536) | |
| (0,1) | ||
| (0,10) |
Table 2
Function comparison experimental results
| 函数 | 指标 | GWO | WOA | HHO | GA | PSO | GSHHO |
|---|---|---|---|---|---|---|---|
| F1 | 最优值 | 1.400 1×10-125 | 2.765 4×10-218 | 2.765 4×10-218 | 0.025 4 | 2.935 9×10-11 | 2.765 4×10-218 |
| 平均值 | 3.113 5×10-117 | 1.980 6×10-156 | 3.017 2×10-189 | 1.470 2 | 3.014 2×10-9 | 6.717 5×10-191 | |
| 标准差 | 9.360 5×10-117 | 6.240 4×10-156 | 0 | 2.087 3 | 5.743 6×10-9 | 0 | |
| F2 | 最优值 | 4.557 1×10-65 | 1.546×10-193 | 1.546×10-193 | 8.330 3×102 | 1.338 3×10-4 | 1.546 0×10-193 |
| 平均值 | 9.318 8×10-52 | 18.815 4 | 1.144 6×10-163 | 3.982 3×103 | 0.001 8 | 1.853 0×10-165 | |
| 标准差 | 5.033 1×10-51 | 52.093 2 | 9.987 6×10-161 | 2.398 5×103 | 0.001 9 | 0 | |
| F4 | 最优值 | -3.716 0×103 | -4.189 8×103 | -4.189 8×103 | -1.845 4×103 | -3.064 7×103 | -4.189 8×103 |
| 平均值 | -2.804 3×103 | -3.434 4×103 | -4.164 8×103 | -1.228 6×103 | -2.493 1×103 | -4.189 8×103 | |
| 标准差 | 3.403 2×102 | 5.785 2×102 | 1.369 9×102 | 2.7755×102 | 3.672 1×102 | 0.033 0 | |
| F6 | 最优值 | 0.998 0 | 0.998 0 | 0.998 0 | 0.998 0 | 0.998 0 | 0.998 0 |
| 平均值 | 5.107 7 | 3.314 9 | 1.196 8 | 1.023 4 | 3.103 3 | 0.998 0 | |
| 标准差 | 4.441 2 | 3.858 7 | 0.404 4 | 0.129 7 | 2.322 3 | 2.375 4×10-10 | |
| F8 | 最优值 | -3.322 0 | -3.315 6 | -3.315 6 | -2.607 5 | -3.322 0 | -3.410 2 |
| 平均值 | -3.256 5 | -3.256 9 | -3.122 3 | -1.608 8 | -3.278 4 | -3.383 7 | |
| 标准差 | 0.069 8 | 0.089 1 | 0.097 3 | 0.548 3 | 0.058 3 | 0.072 3 | |
| F9 | 最优值 | -10.536 4 | -10.536 3 | -10.536 3 | -2.123 4 | -10.536 4 | -10.536 6 |
| 平均值 | -10.535 9 | -7.911 9 | -5.302 8 | -1.217 0 | -9.862 5 | -10.588 1 | |
| 标准差 | 3.030 3 | 3.098 7 | 0.960 9 | 0.422 7 | 2.086 7 | 0.077 6 |
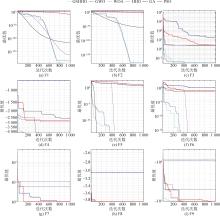
Fig. 3
Comparison of algorithm convergence curves
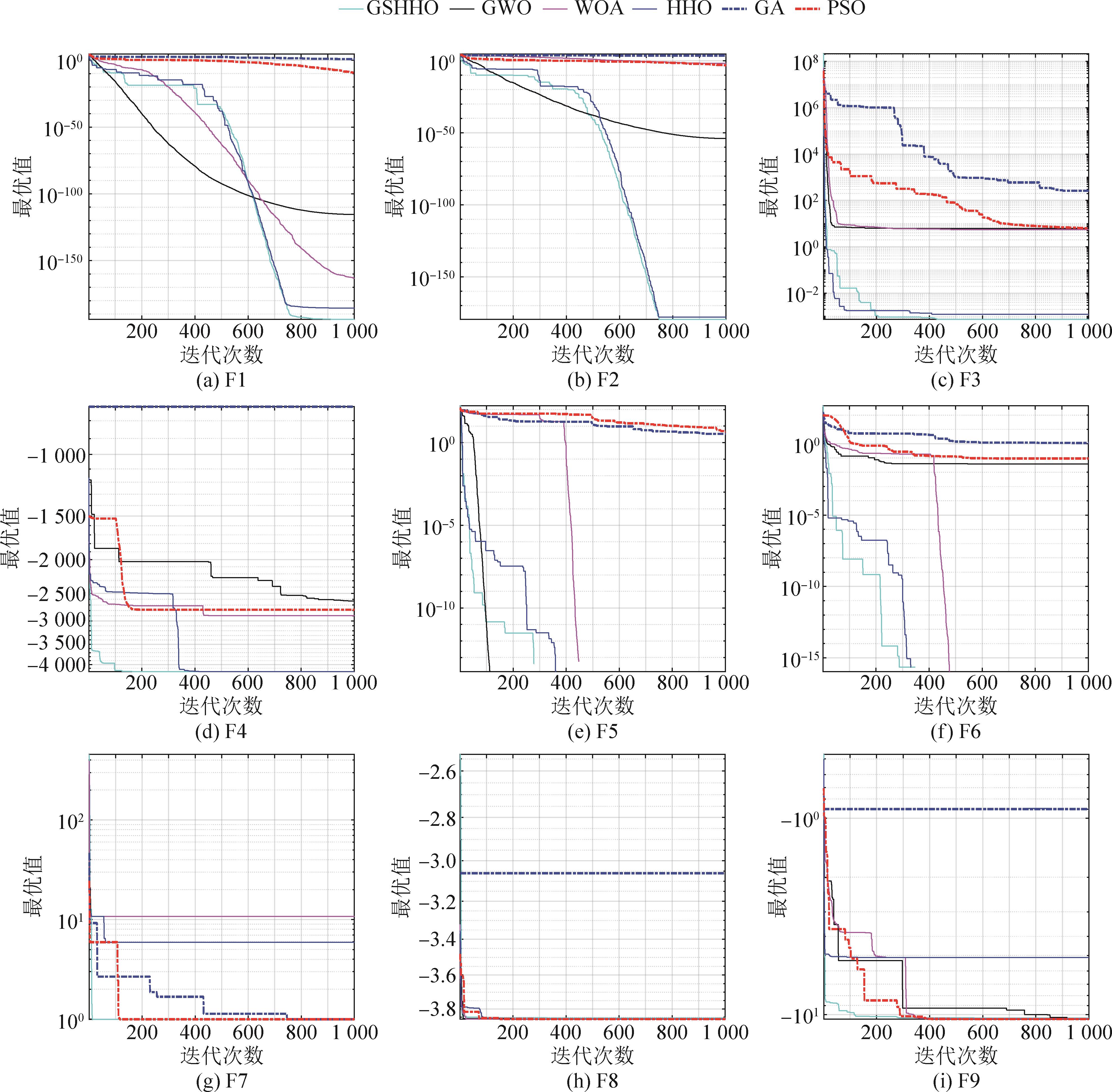
Table 3
Experimental data of path planning
| 地图 | 实验次数 | GA | PSO | GWO | WOA | HHO | GSHHO |
|---|---|---|---|---|---|---|---|
| 简单 | 1 | 28.577 7 | 29.827 2 | 28.577 7 | 31.964 0 | 28.577 7 | 28.419 3 |
| 2 | 28.531 2 | 31.052 5 | 28.577 7 | 30.809 8 | 30.484 9 | 28.139 5 | |
| 3 | 31.052 5 | 29.411 7 | 29.892 6 | 31.424 7 | 28.577 7 | 28.577 7 | |
| 4 | 28.725 2 | 29.411 7 | 28.419 3 | 29.890 2 | 31.052 5 | 28.419 3 | |
| 5 | 30.533 9 | 28.577 7 | 28.577 7 | 32.339 9 | 30.475 2 | 28.577 7 | |
| 6 | 29.233 5 | 29.411 7 | 28.577 7 | 31.655 4 | 29.264 6 | 28.139 5 | |
| 7 | 30.188 5 | 30.188 5 | 30.188 5 | 33.095 2 | 30.767 4 | 28.631 5 | |
| 8 | 31.052 5 | 30.188 5 | 29.954 7 | 33.090 8 | 30.297 6 | 29.901 7 | |
| 9 | 29.954 7 | 31.073 3 | 28.577 7 | 30.282 0 | 28.577 7 | 28.577 7 | |
| 10 | 30.892 7 | 28.577 7 | 28.725 2 | 32.483 8 | 31.052 5 | 28.577 7 | |
| 复杂 | 1 | 60.566 8 | 65.052 5 | 64.069 5 | 76.828 4 | 69.022 7 | 58.925 |
| 2 | 63.927 5 | 61.259 2 | 63.434 7 | 76.828 4 | 60.784 9 | 59.562 1 | |
| 3 | 61.165 8 | 70.924 4 | 65.277 0 | 75.656 9 | 62.269 9 | 61.326 7 | |
| 4 | 66.620 5 | 62.837 5 | 61.699 2 | 76.828 4 | 67.363 0 | 61.240 7 | |
| 5 | 59.891 9 | 66.227 2 | 59.891 0 | 76.828 4 | 68.086 0 | 59.708 6 | |
| 6 | 60.532 0 | 71.424 3 | 66.544 3 | 75.656 9 | 63.954 6 | 59.804 9 | |
| 7 | 73.447 9 | 71.317 6 | 78.519 7 | 76.828 4 | 59.985 6 | 58.241 0 | |
| 8 | 59.522 4 | 62.891 8 | 59.669 0 | 76.828 4 | 61.778 5 | 59.141 0 | |
| 9 | 60.572 1 | 67.537 7 | 63.545 4 | 76.242 6 | 65.359 1 | 58.082 5 | |
| 10 | 61.820 5 | 62.561 2 | 62.506 0 | 76.828 4 | 64.570 5 | 60.870 2 |

Fig. 4
Comparison of results in a simple map
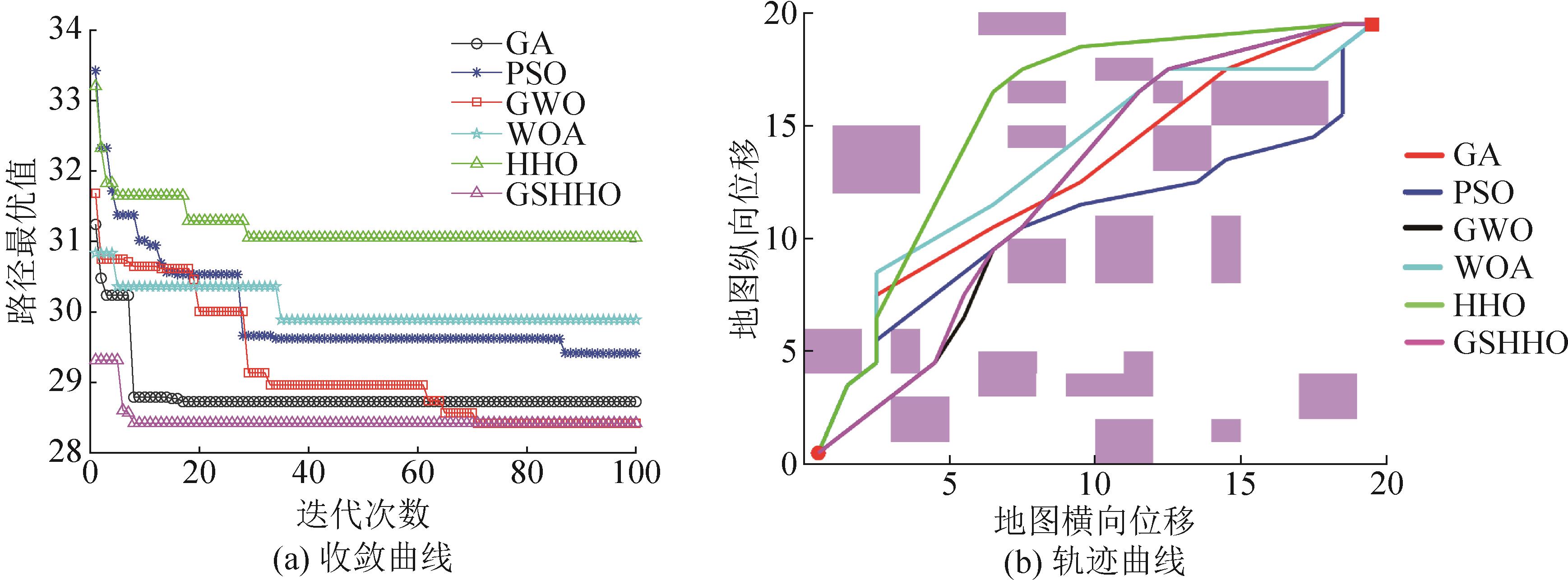

Fig. 5
Comparison of the effects of complex maps
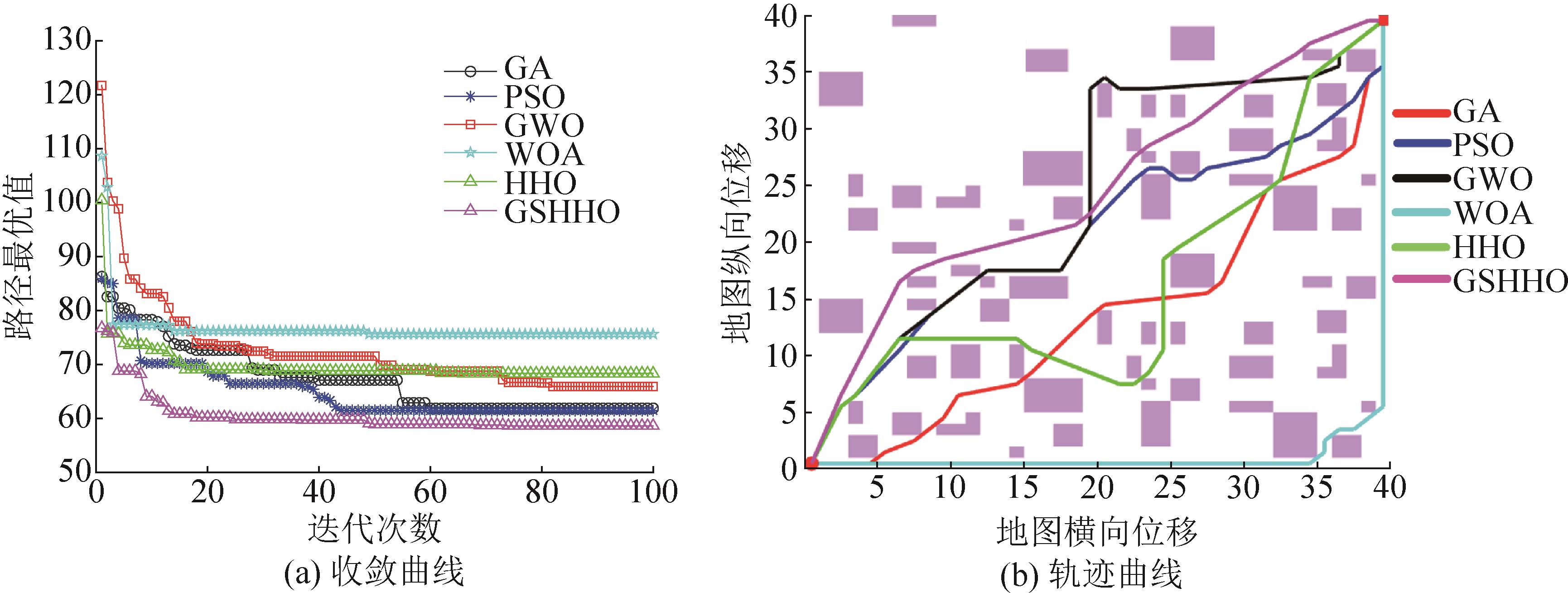
Table 4
Comparison of path planning experimental analysis results
| 地图环境 | 算法 | 最优值 | 平均值 | 标准差 |
|---|---|---|---|---|
| 简单 | GA | 28.531 2 | 29.874 2 | 0.978 3 |
| PSO | 28.577 7 | 29.772 1 | 0.832 2 | |
| GWO | 28.419 3 | 29.006 9 | 0.665 2 | |
| WOA | 29.890 2 | 31.703 6 | 1.055 0 | |
| HHO | 28.577 7 | 29.912 8 | 0.994 4 | |
| GSHHO | 28.139 5 | 28.596 2 | 0.467 6 | |
| 复杂 | GA | 62.806 7 | 59.522 4 | 4.088 6 |
| PSO | 66.203 3 | 61.259 2 | 3.725 8 | |
| GWO | 64.515 6 | 59.669 | 5.098 7 | |
| WOA | 76.535 5 | 75.656 9 | 0.472 2 | |
| HHO | 64.317 5 | 59.985 6 | 2.979 6 | |
| GSHHO | 59.690 3 | 58.082 5 | 1.098 9 |
| 1 | 周庆懿, 瞿佳伟, 张春雷. 基于机器视觉的五轴点胶机工件定位算法研发[J]. 自动化与仪表, 2022, 37(5): 63-69. |
| Zhou Qingyi, Qu Jiawei, Zhang Chunlei. Research of Workpiece Positioning Algorithm of Five-axis Dispensing Machine Based on Machine Vision[J]. Automation & Instrumentation, 2022, 37(5): 63-69. | |
| 2 | 余浪, 苗鸿宾, 申光鹏, 等. 基于机器视觉的工件识别与定位算法[J]. 自动化与仪表, 2023, 38(6): 29-33, 38. |
| Yu Lang, Miao Hongbin, Shen Guangpeng, et al. Algorithm for Workpiece Recognition and Location Based on Machine Vision[J]. Automation & Instrumentation, 2023, 38(6): 29-33, 38. | |
| 3 | Meng Fan, Li Jinhui, Zhang Yunqi, et al. Transforming Unmanned Pineapple Picking with Spatio-temporal Convolutional Neural Networks[J]. Computers and Electronics in Agriculture, 2023, 214: 108298. |
| 4 | Shi Huaitao, Li Gang, Bai Xiaotian, et al. Research on Nonlinear Control Method of Underactuated Gantry Crane Based on Machine Vision Positioning[J]. Symmetry, 2019, 11(8): 987. |
| 5 | Fan Qian, Chen Zhenjian, Li Zhao, et al. An Efficient Refracted Salp Swarm Algorithm and Its Application in Structural Parameter Identification[J]. Engineering with Computers, 2022, 38(1): 175-189. |
| 6 | Hu Rongxin, Bao Liyong, Ding Hongwei, et al. Analysis of the Influence of Population Distribution Characteristics on Swarm Intelligence Optimization Algorithms[J]. Information Sciences, 2023, 645: 119340. |
| 7 | Ali Asghar Heidari, Mirjalili Seyedali, Faris Hossam, et al. Harris Hawks Optimization: Algorithm and Applications[J]. Future Generation Computer Systems, 2019, 97: 849-872. |
| 8 | Brezočnik Lucija, Fister Iztok, Podgorelec Vili. Swarm Intelligence Algorithms for Feature Selection: A Review[J]. Applied Sciences, 2018, 8(9): 1521. |
| 9 | Zenab Mohamed Elgamal, Norizan Binti Mohd Yasin, Tubishat Mohammad, et al. An Improved Harris Hawks Optimization Algorithm with Simulated Annealing for Feature Selection in the Medical Field[J]. IEEE Access, 2020, 8: 186638-186652. |
| 10 | 宋美佳, 贾鹤鸣, 林志兴, 等. 融合非线性收敛因子与变异准反射学习的哈里斯鹰优化算法[J]. 智能系统学报, 2024, 19(3): 738-748. |
| Song Meijia, Jia Heming, Lin Zhixing, et al. Harris Hawks Optimization Algorithm Based on Nonlinear Convergence Factor and Mutation Quasi-reflected-based Learning[J]. CAAI Transactions on Intelligent Systems, 2024, 19(3): 738-748. | |
| 11 | 李岩, 钱谦. 基于多种群与协同量子化的哈里斯鹰优化算法[J]. 控制与决策, 2024, 39(7): 2169-2176. |
| Li Yan, Qian Qian. Harris Hawks Optimization Algorithm Based on Multigroup and Collaborative Quantization[J]. Control and Decision, 2024, 39(7): 2169-2176. | |
| 12 | Akpamukcu Mehmet, Ates Abdullah, Akdag Ozan. Combination of Electromagnetic Field and Harris Hawks Optimization Algorithms with Optimization to Optimization Structure and Its Application for Optimum Power Flow[J]. Journal of the Chinese Institute of Engineers, 2023, 46(7): 754-765. |
| 13 | Gezici Harun, Livatyalı Haydar. Chaotic Harris Hawks Optimization Algorithm[J]. Journal of Computational Design and Engineering, 2022, 9(1): 216-245. |
| 14 | Wang Xiaonan, Hu Hao, Liang Yanxue, et al. On the Mathematical Models and Applications of Swarm Intelligent Optimization Algorithms[J]. Archives of Computational Methods in Engineering, 2022, 29(6): 3815-3842. |
| 15 | 黄志锋, 刘媛华, 任志豪, 等. 融合改进哈里斯鹰和改进动态窗口的机器人动态路径规划[J]. 计算机应用研究, 2024, 41(2): 450-458. |
| Huang Zhifeng, Liu Yuanhua, Ren Zhihao, et al. Research on Mobile Robot Dynamic Path Planning Based on Improved Harris Hawk Algorithm and Improved Dynamic Window Algorithm[J]. Application Research of Computers, 2024, 41(2): 450-458. | |
| 16 | 黄琴, 张惠珍, 马良, 等. 混合哈里斯鹰优化算法求解带模糊需求的低碳多式联运路径规划问题[J]. 计算机应用研究, 2023, 40(10): 2978-2983, 2999. |
| Huang Qin, Zhang Huizhen, Ma Liang, et al. Hybrid Harris Hawks Optimization Algorithm for Solving Low-carbon Multimodal Transportation Problem with Fuzzy Demand[J]. Application Research of Computers, 2023, 40(10): 2978-2983, 2999. | |
| 17 | Belge Egemen, Altan Aytaç, Hacıoğlu Rıfat. Metaheuristic Optimization-based Path Planning and Tracking of Quadcopter for Payload Hold-release Mission[J]. Electronics, 2022, 11(8): 1208. |
| 18 | Huang Lin, Fu Qiang, Tong Nan. An Improved Harris Hawks Optimization Algorithm and Its Application in Grid Map Path Planning[J]. Biomimetics, 2023, 8(5): 428. |
| 19 | Yu Yang, Gao Shangce, Cheng Shi, et al. CBSO: A Memetic Brain Storm Optimization with Chaotic Local Search[J]. Memetic Computing, 2018, 10(4): 353-367. |
| 20 | 逯苗, 何登旭, 曲良东. 非线性参数的精英学习灰狼优化算法[J]. 广西师范大学学报(自然科学版), 2021, 39(4): 55-67. |
| Lu Miao, He Dengxu, Qu Liangdong. Grey Wolf Optimization Algorithm Based on Elite Learning for Nonlinear Parameters[J]. Journal of Guangxi Normal University(Natural Science Edition), 2021, 39(4): 55-67. | |
| 21 | 黄霖, 符强, 童楠. 基于自适应调整哈里斯鹰优化算法求解机器人路径规划问题[J]. 计算机应用, 2023, 43(12): 3840-3847. |
| Huang Lin, Fu Qiang, Tong Nan. Solving Robot Path Planning Problem by Adaptively Adjusted Harris Hawk Optimization Algorithm[J]. Journal of Computer Applications, 2023, 43(12): 3840-3847. | |
| 22 | Tanyildizi E, Demir G. Golden Sine Algorithm: A Novel Math-inspired Algorithm[J]. Advances in Electrical and Computer Engineering, 2017, 17(2): 71-78. |
| 23 | Mansor M A, Morris A S. Path Planning in Unknown Environment with Obstacles Using Virtual Window[J]. Journal of Intelligent and Robotic Systems, 1999, 24(3): 235-251. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
