

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (10): 2630-2642.doi: 10.16182/j.issn1004731x.joss.24-0515
• Papers • Previous Articles Next Articles
Wang Ning, Mao Jianlin, Li Dayan, Fang Chengyuan, Qian Chengze
Received:2024-05-15
Revised:2024-07-01
Online:2025-10-20
Published:2025-10-21
Contact:
Mao Jianlin
CLC Number:
Wang Ning, Mao Jianlin, Li Dayan, Fang Chengyuan, Qian Chengze. Low-energy Multi-robot Path Planning Algorithm under HCA* Framework[J]. Journal of System Simulation, 2025, 37(10): 2630-2642.

Fig. 1
Straight-line and turning actions of differential-drive robot
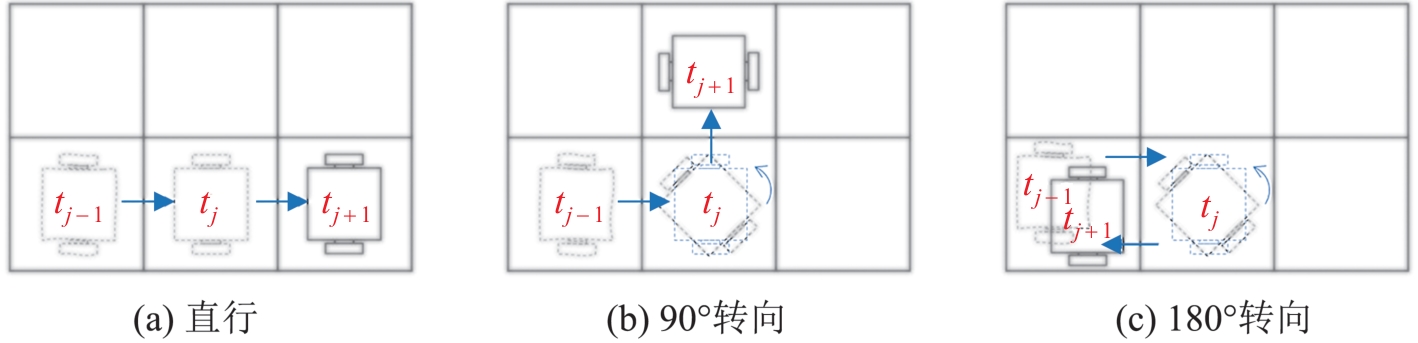
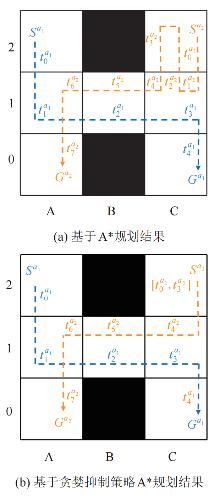
Fig. 2
Example of oscillating path
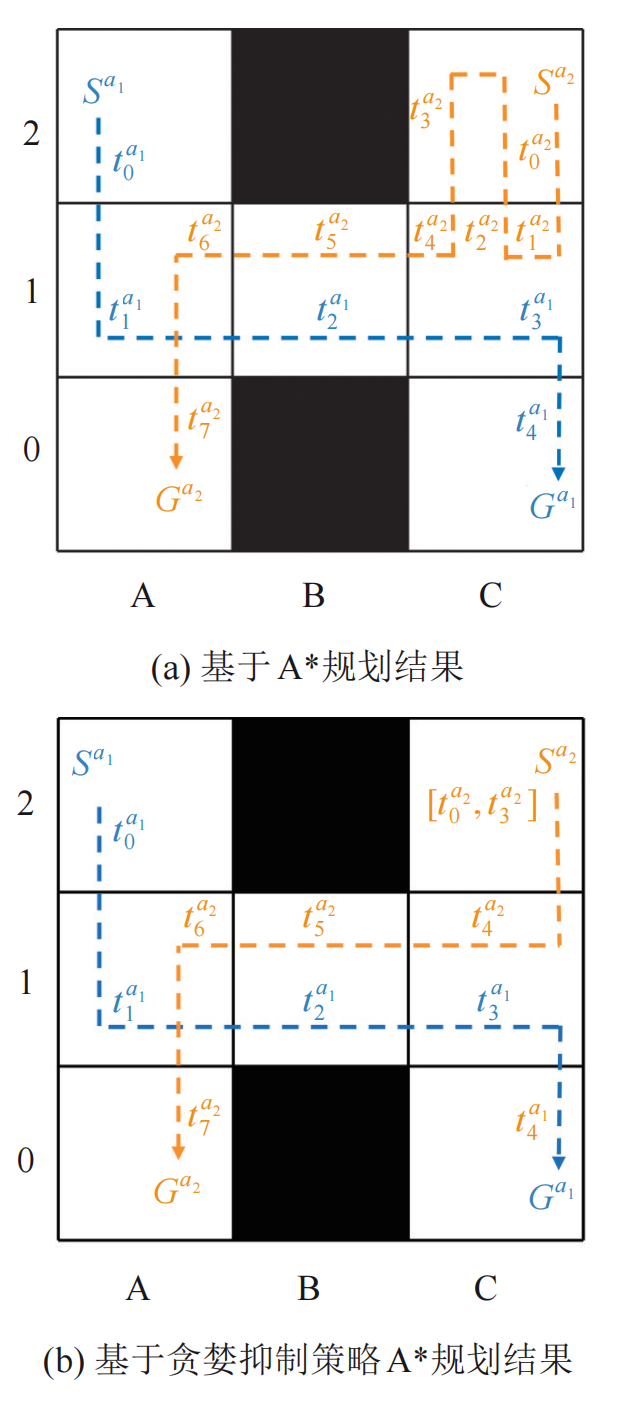

Fig. 3
Node expansion process in example
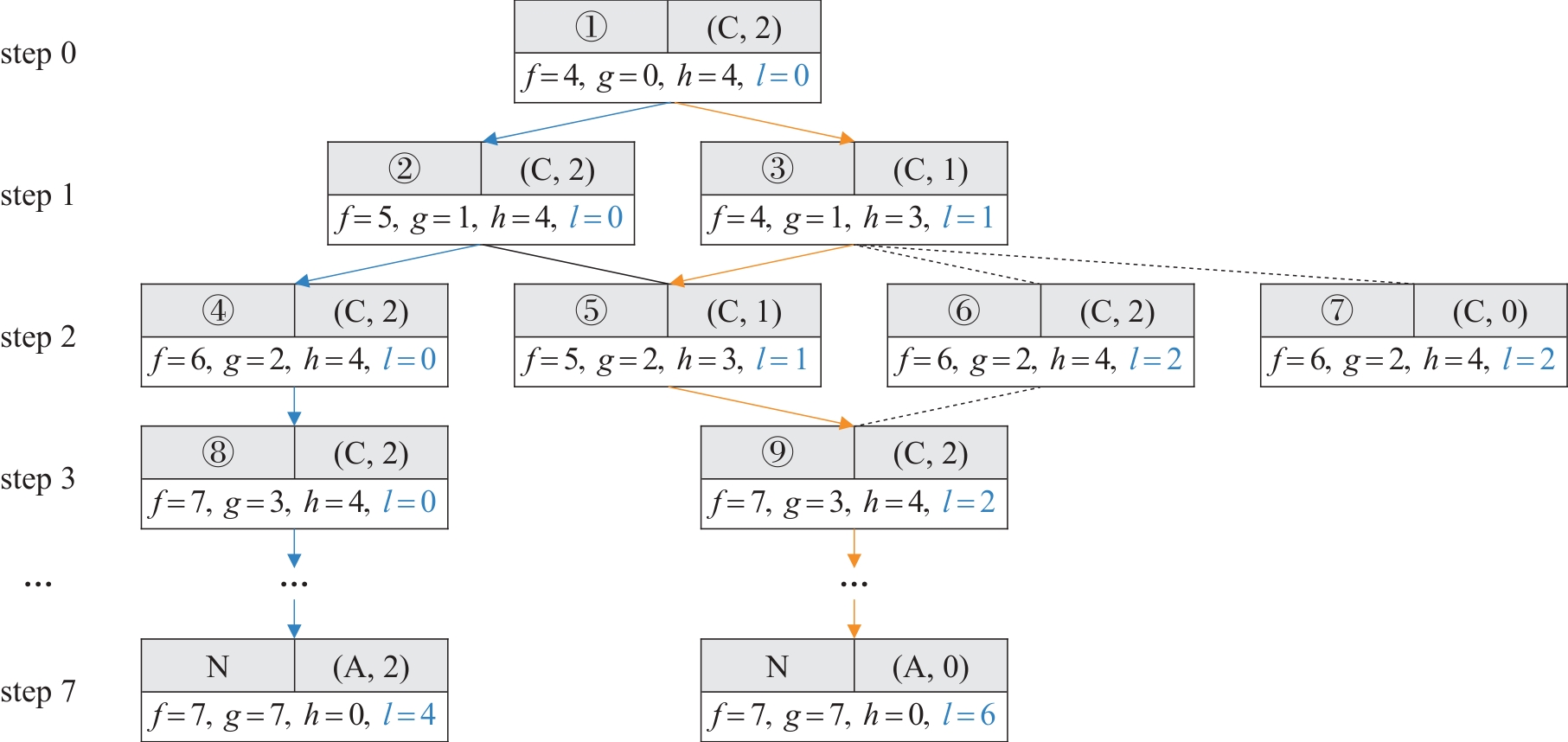

Fig. 4
Framework of E-HCA* algorithm
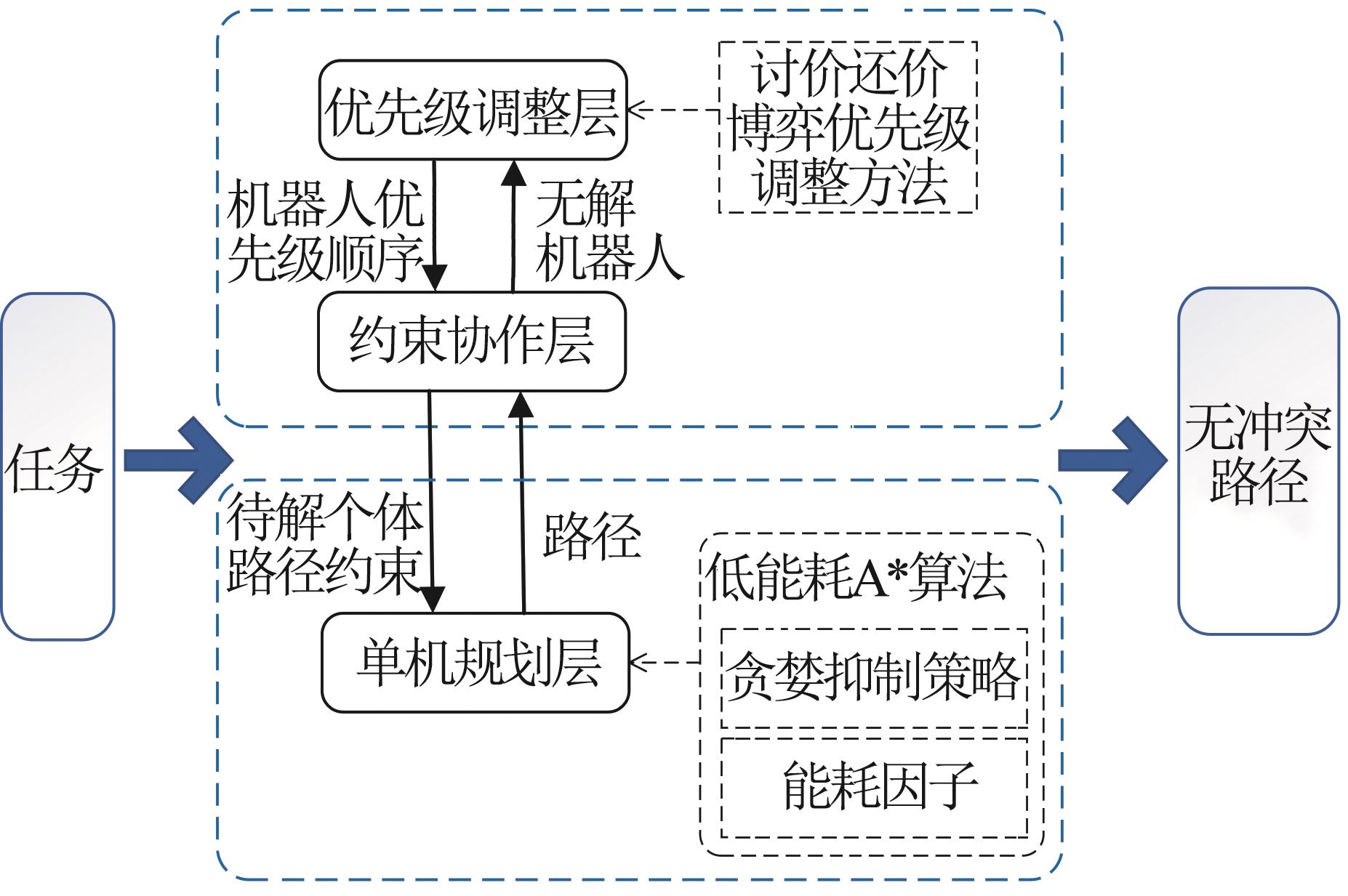
Fig. 5
8×8 map and its task configuration
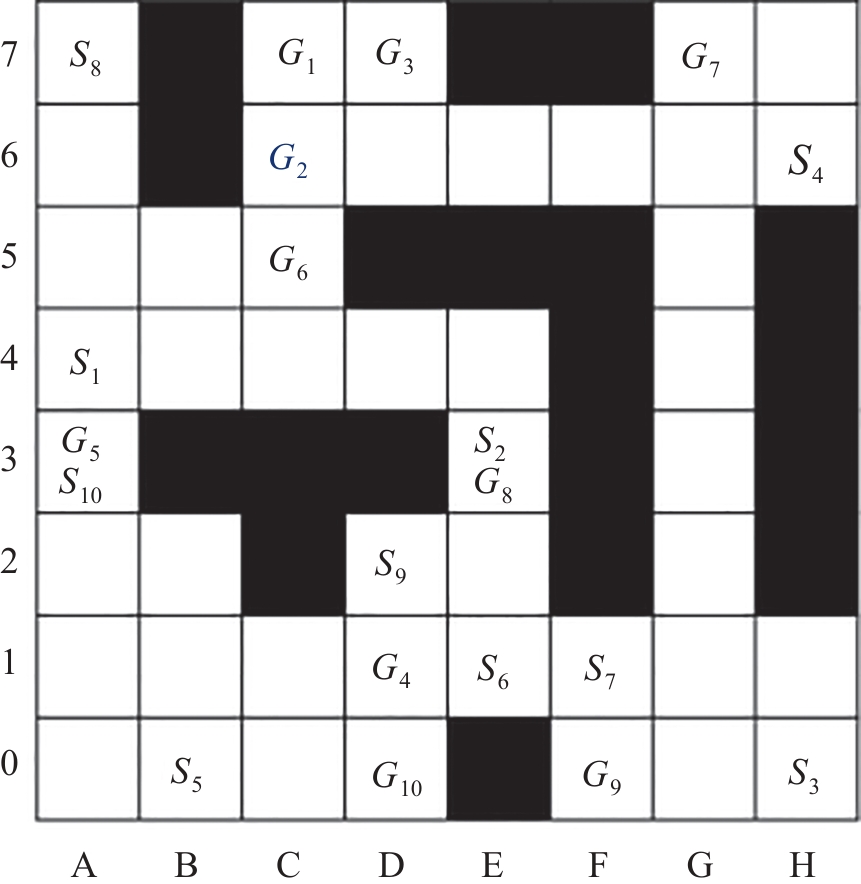

Fig. 6
Path finding solution space
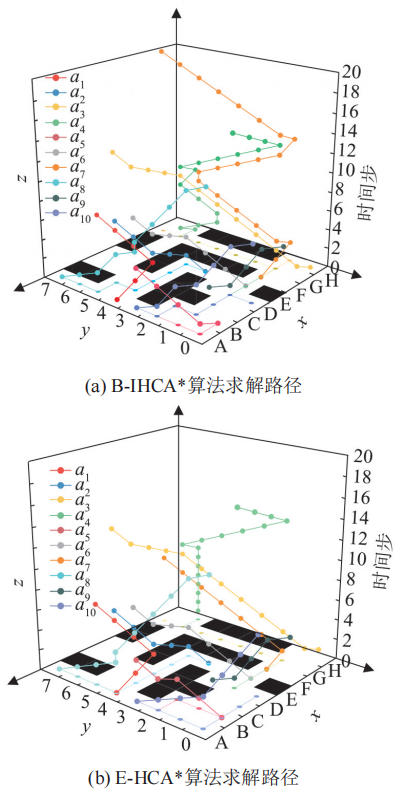
Table 1
Performance metrics on 8-8 map for path finding solution
| 算法 | 路径总代价/步 | 最大完工时间/步 | 路径总长度/m | 路径总转向次数/次 | 路径总能耗/kJ |
|---|---|---|---|---|---|
| B-IHCA* | 86 | 20 | 83 | 36 | 117.48 |
| B-IHCA*+GSS | 73 | 16 | 65 | 22 | 88.63 |
| E-HCA* | 73 | 16 | 65 | 18 | 86.41 |
Fig. 7
Map for large-scale random task experiments
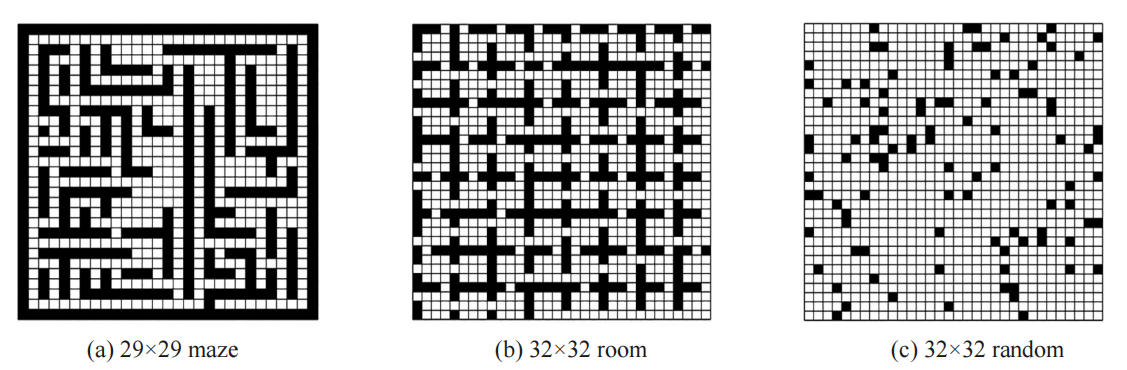

Fig. 8
VSoE obtained by different algorithms
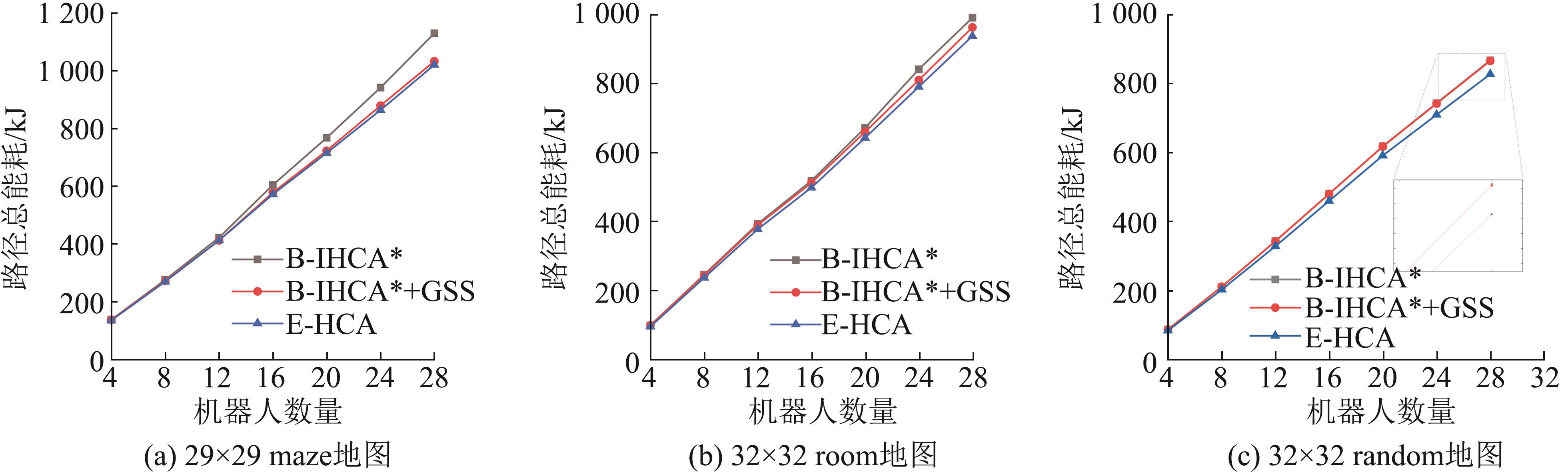
Fig. 9
Number of turns obtained by different algorithms
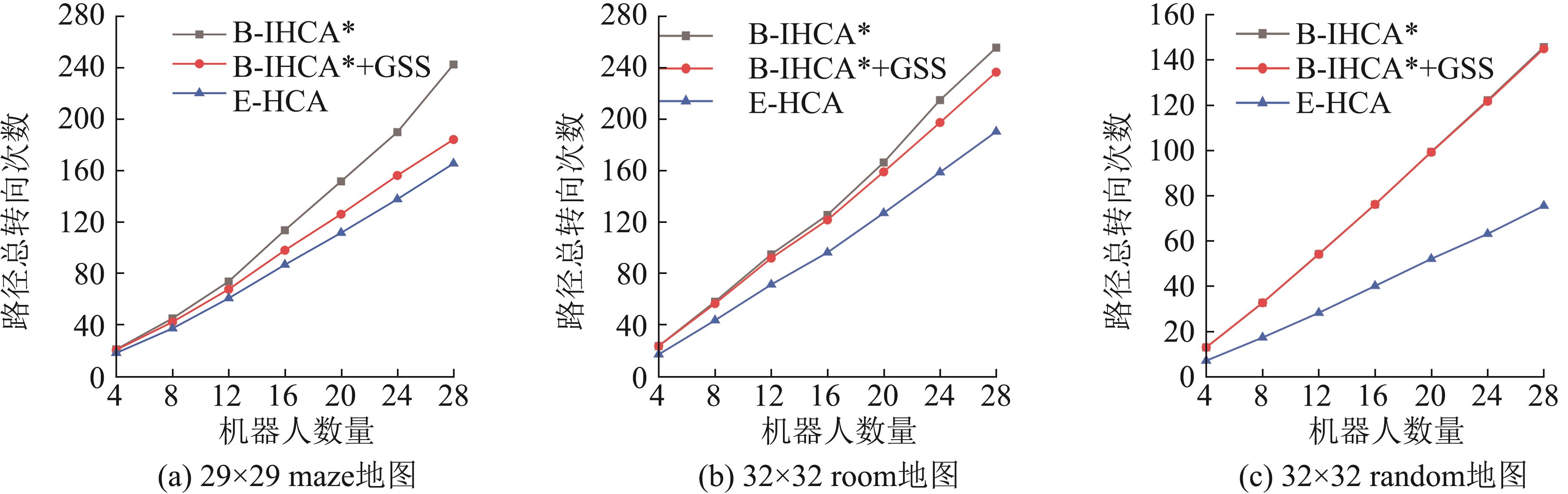

Fig. 10
VSoL obtained by different algorithms
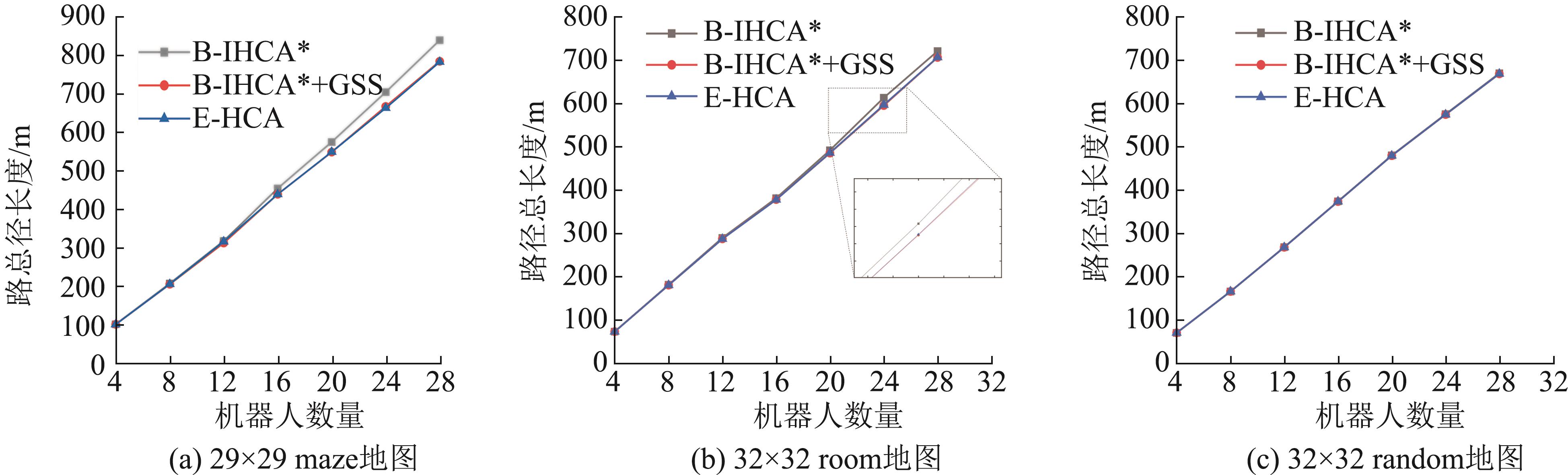
Table 2
Average VSOC for each algorithm on different maps
| 地图 | 机器人数量/个 | 算例数量 | 平均路径总代价值/步 | ||
|---|---|---|---|---|---|
| B-IHCA* | B-IHCA*+GSS | E-HCA* | |||
| 29×29 maze | 4 | 20 | 108.40 | 108.40 | 108.40 |
| 8 | 20 | 217.30 | 216.75 | 216.60 | |
| 12 | 18 | 330.44 | 330.50 | 333.27 | |
| 16 | 18 | 472.44 | 471.89 | 472.62 | |
| 20 | 18 | 601.89 | 602.17 | 605.17 | |
| 24 | 17 | 736.50 | 736.39 | 737.82 | |
| 28 | 16 | 883.67 | 875.88 | 880.10 | |
| 32×32 room | 4 | 20 | 72.95 | 72.95 | 72.65 |
| 8 | 20 | 182.35 | 182.35 | 182.05 | |
| 12 | 18 | 294.10 | 294.20 | 292.95 | |
| 16 | 18 | 389.61 | 389.72 | 392.06 | |
| 20 | 18 | 503.78 | 503.89 | 507.41 | |
| 24 | 17 | 632.53 | 624.17 | 627.15 | |
| 28 | 16 | 753.72 | 752.22 | 756.26 | |
| 32×32 random | 4 | 20 | 68.10 | 68.10 | 68.10 |
| 8 | 20 | 164.25 | 164.25 | 164.90 | |
| 12 | 18 | 268.85 | 268.85 | 269.00 | |
| 16 | 18 | 377.45 | 377.45 | 378.35 | |
| 20 | 18 | 485.15 | 485.15 | 488.15 | |
| 24 | 17 | 585.90 | 585.90 | 589.90 | |
| 28 | 17 | 686.75 | 686.75 | 691.85 | |
Fig. 11
Physical experiment map
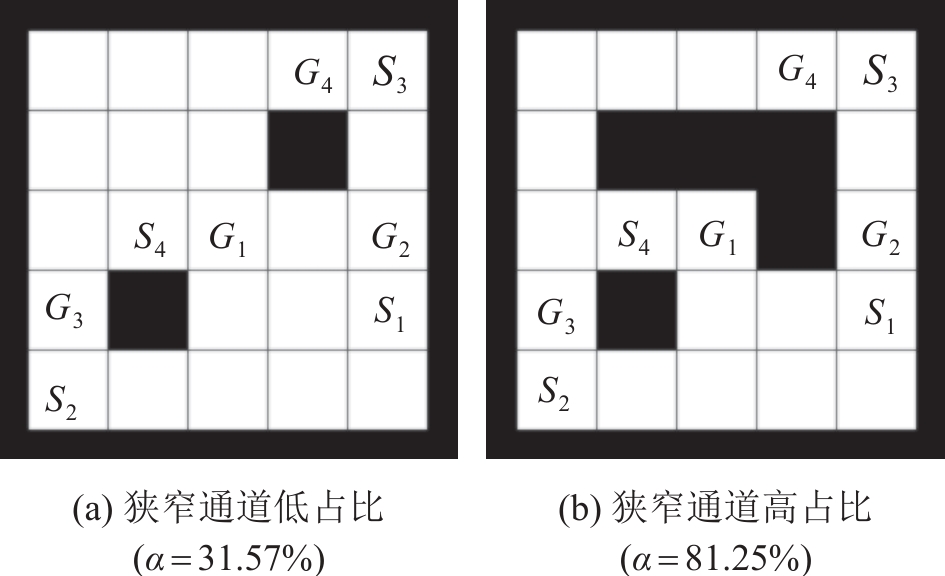

Fig. 12
Path planning execution results of B-IHCA* algorithm for scenario with a low percentage of narrow passages


Fig. 13
Path planning execution results of E-HCA* algorithm for scenario with a low percentage of narrow passages


Fig. 14
Path planning execution results of B-IHCA* algorithm for scenario with a high percentage of narrow passages


Fig. 15
Path planning execution results of E-HCA* algorithm for scenario with a high percentage of narrow passages

| [1] | 高明, 唐洪, 张鹏. 机器人集群路径规划技术研究现状[J]. 国防科技大学学报, 2021, 43(1): 127-138. |
| Gao Ming, Tang Hong, Zhang Peng. Survey of Path Planning Technologies for Robots Swarm[J]. Journal of National University of Defense Technology, 2021, 43(1): 127-138. | |
| [2] | Zhang Kaixiang, Mao Jianlin, Chen Mingfang, et al. Multi-agent Priority Gaming for Path Planning in Chain-like Blocking Situation[J]. Advanced Engineering Informatics, 2024, 61: 102523. |
| [3] | Zhang Yulun, Fontaine M C, Bhatt V, et al. Multi-robot Coordination and Layout Design for Automated Warehousing[C]//Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence (IJCAI-23). California: IJCAI, 2024: 5503-5511. |
| [4] | Li Jiaoyang, Sun Kexuan, Ma Hang, et al. Moving Agents in Formation in Congested Environments[C]//Proceedings of the Thirteenth International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2021: 131-132. |
| [5] | Wu Mengdie, Yan Wenyao, Hasan Haslin, et al. A Review of Multi-agent Path Finding Algorithms[C]//2023 11th International Conference on Information Systems and Computing Technology (ISCTech). Piscataway: IEEE, 2023: 69-73. |
| [6] | Liu Minghua, Ma Hang, Li Jiaoyang, et al. Task and Path Planning for Multi-agent Pickup and Delivery[C]//Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2019: 1152-1160. |
| [7] | Ma Hang, Yang Jingxing, Cohen L, et al. Feasibility Study: Moving Non-homogeneous Teams in Congested Video Game Environments[C]//Proceedings of the Thirteenth AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment. Palo Alto: AAAI Press, 2021: 270-272. |
| [8] | Sharon Guni, Stern Roni, Goldenberg Meir, et al. The Increasing Cost Tree Search for Optimal Multi-agent Pathfinding[J]. Artificial Intelligence, 2013, 195: 470-495. |
| [9] | Sharon Guni, Stern Roni, Felner Ariel, et al. Conflict-based Search for Optimal Multi-agent Pathfinding[J]. Artificial Intelligence, 2015, 219: 40-66. |
| [10] | Boyarski Eli, Felner Ariel, Stern Roni, et al. ICBS: The Improved Conflict-based Search Algorithm for Multi-agent Pathfinding[C]//Proceedings of the Eighth International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2015: 223-225. |
| [11] | Walker T T, Sturtevant Nathan R, Felner Ariel, et al. Conflict-based Increasing Cost Search[C]//Proceedings of the Thirty-First International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2021: 385-395. |
| [12] | 宣志玮, 毛剑琳, 张凯翔. CBS框架下面向复杂地图的低拓展度A*算法[J]. 电子学报, 2022, 50(8): 1943-1950. |
| Xuan Zhiwei, Mao Jianlin, Zhang Kaixiang. Low-expansion A* Algorithm Based on CBS Framework for Complex Map[J]. Acta Electronica Sinica, 2022, 50(8): 1943-1950. | |
| [13] | 杨邹, 毛剑琳, 李大焱, 等. 基于冲突概率反馈的CBS分层多机器人路径规划[J/OL]. 计算机集成制造系统. (2023-07-31) [2024-07-01]. . |
| Yang Zou, Mao Jianlin, Li Dayan, et al. CBS Hierarchical Multi-robot Path Planning Based on Conflict Probability Feedback[J/OL]. Computer Integrated Manufacturing Systems. (2023-07-31) [2024-07-01]. . | |
| [14] | Silver David. Cooperative Pathfinding[C]//First Artificial Intelligence and Interactive Digital Entertainment Conference. Palo Alto: AAAI Press, 2021: 117-122. |
| [15] | Phillips M, Likhachev M. SIPP: Safe Interval Path Planning for Dynamic Environments[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 5628-5635. |
| [16] | Yakovlev Konstantin, Andreychuk Anton, Stern Roni. Revisiting Bounded-suboptimal Safe Interval Path Planning[C]//Proceedings of the Thirtieth International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 300-304. |
| [17] | Li Jiaoyang, Ruml W, Koenig S. EECBS: Bounded-suboptimal Search for Multi-agent Path Finding[C]//Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence and the Thirty-Third Conference on Innovative Applications of Artificial Intelligence and the Eleventh Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2021: 12353-12362. |
| [18] | 张凯翔, 毛剑琳, 向凤红, 等. 基于讨价还价博弈机制的B-IHCA*多机器人路径规划算法[J]. 自动化学报, 2023, 49(7): 1483-1497. |
| Zhang Kaixiang, Mao Jianlin, Xiang Fenghong, et al. B-IHCA*, a Bargaining Game Based Multi-agent Path Finding Algorithm[J]. Acta Automatica Sinica, 2023, 49(7): 1483-1497. | |
| [19] | Li Jiaoyang, Hoang T A, Lin E, et al. Intersection Coordination with Priority-based Search for Autonomous Vehicles[C]//Proceedings of the Thirty-Seventh AAAI Conference on Artificial Intelligence and Thirty-Fifth Conference on Innovative Applications of Artificial Intelligence and Thirteenth Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2023: 11578-11585. |
| [20] | Sartoretti G, Kerr J, Shi Yunfei, et al. PRIMAL: Pathfinding via Reinforcement and Imitation Multi-agent Learning[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2378-2385. |
| [21] | Damani M, Luo Zhiyao, Wenzel E, et al. PRIMAL2: Pathfinding via Reinforcement and Imitation Multi-agent Learning-lifelong[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 2666-2673. |
| [22] | 闫星宇, 李大焱, 王妮娅, 等. 带障碍物惩罚因子的多机器人路径规划[J]. 系统仿真学报, 2024, 36(3): 673-685. |
| Yan Xingyu, Li Dayan, Wang Niya, et al. Multi-agent Path Planning with Obstacle Penalty Factor[J]. Journal of System Simulation, 2024, 36(3): 673-685. | |
| [23] | Stern Roni. Multi-agent Path Finding-an Overview[M]//Gennady S Osipov, Aleksandr I Panov, Konstantin S Yakovlev. Artificial Intelligence. Cham: Springer International Publishing, 2019: 96-115. |
| [24] | Stern Roni, Sturtevant Nathan, Felner Ariel, et al. Multi-agent Pathfinding: Definitions, Variants, and Benchmarks[C]//Proceedings of the International Symposium on Combinatorial Search. Palo Alto: AAAI Press, 2019: 151-158. |
| [25] | Liu Shuang, Sun Dong. Minimizing Energy Consumption of Wheeled Mobile Robots via Optimal Motion Planning[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(2): 401-411. |
| [26] | Lian Yindong, Zhang Langwen, Xie Wei, et al. An Improved Heuristic Path Planning Algorithm for Minimizing Energy Consumption in Distributed Multi-AGV Systems[C]//2020 International Symposium on Autonomous Systems (ISAS). Piscataway: IEEE, 2020: 70-75. |
| [27] | Hu Kewei, Chen Zheng, Kang Hanwen, et al. 3D Vision Technologies for a Self-developed Structural External Crack Damage Recognition Robot[J]. Automation in Construction, 2024, 159: 105262. |
| [28] | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26. |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| [29] | Andreychuk Anton, Yakovlev Konstantin, Surynek Pavel, et al. Multi-agent Pathfinding with Continuous Time[J]. Artificial Intelligence, 2022, 305: 103662. |
| [30] | Atzmon Dor, Stern Roni, Felner Ariel, et al. Robust Multi-agent Path Finding and Executing[J]. Journal of Artificial Intelligence Research, 2020, 67: 549-579. |
| [31] | 张洪琳, 吴耀华, 胡金昌, 等. 一种基于改进冲突搜索的多机器人路径规划算法[J]. 控制与决策, 2023, 38(5): 1327-1335. |
| Zhang Honglin, Wu Yaohua, Hu Jinchang, et al. A Multi-robot Path Finding Algorithm Based on Improved Conflict Search[J]. Control and Decision, 2023, 38(5): 1327-1335. | |
| [32] | Yu Jingjin, LaValle S. Structure and Intractability of Optimal Multi-robot Path Planning on Graphs[C]//Proceedings of the Twenty-Seventh AAAI Conference on Artificial Intelligence and the Twenty-Fifth Conference on Innovative Applications of Artificial Intelligence and the Fourth Symposium on Educational Advances in Artificial Intelligence. Palo Alto: AAAI Press, 2013: 1443-1449. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
