

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (5): 1211-1221.doi: 10.16182/j.issn1004731x.joss.23-0051
Previous Articles Next Articles
Wang Xiaokang( ), Ji Jie(), Liu Yang, He Qing
), Ji Jie(), Liu Yang, He Qing
Received:2023-01-14
Revised:2023-04-03
Online:2024-05-15
Published:2024-05-21
Contact:
Ji Jie
E-mail:1536340368@qq.com;jijiess@swu.edu.cn
CLC Number:
Wang Xiaokang, Ji Jie, Liu Yang, He Qing. Path Planning of Unmanned Delivery Vehicle Based on Improved Q-learning Algorithm[J]. Journal of System Simulation, 2024, 36(5): 1211-1221.
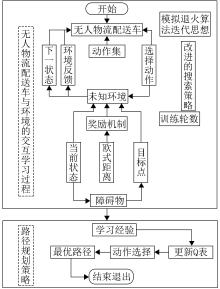
Fig. 1
Path planning framework for unmanned delivery vehicle
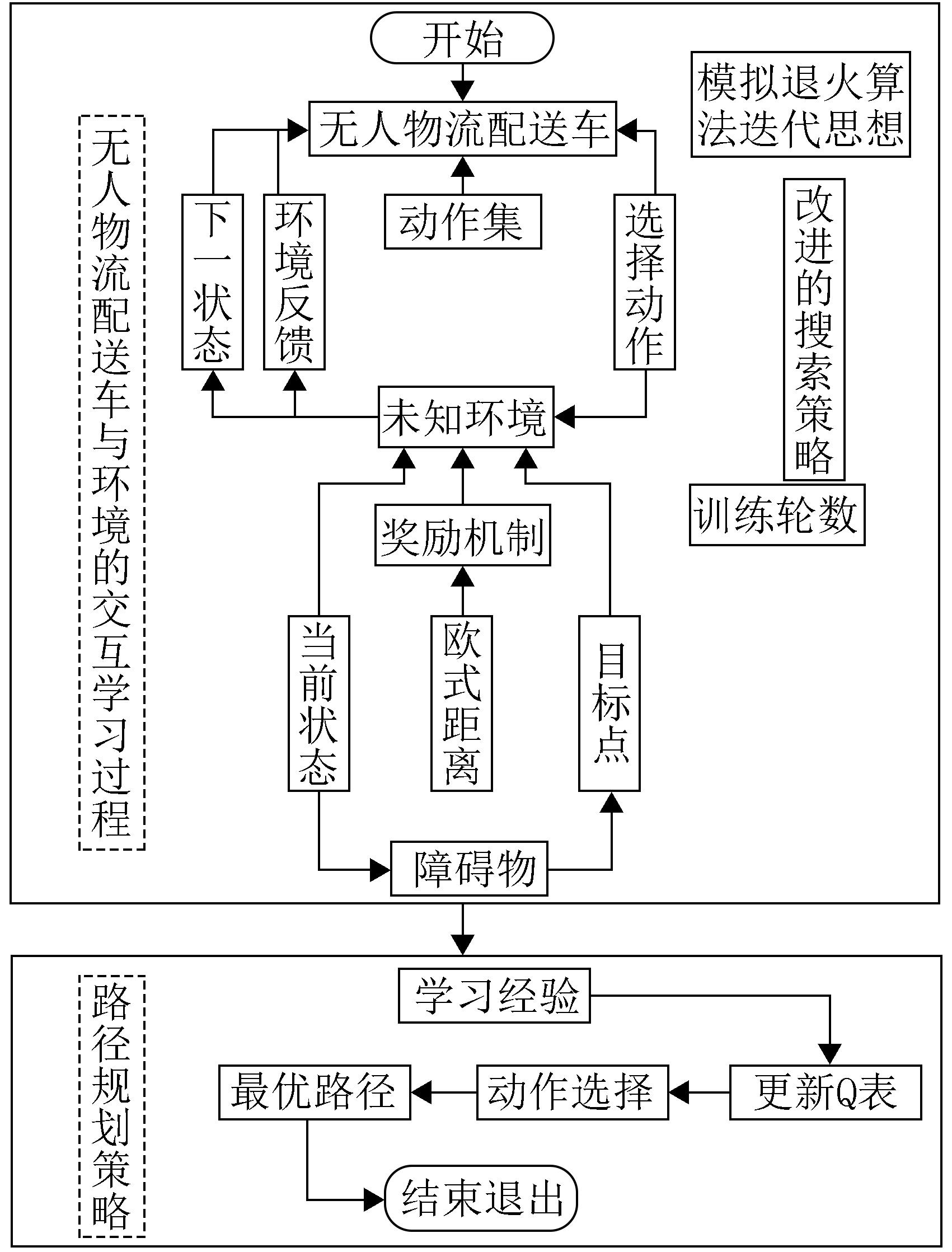
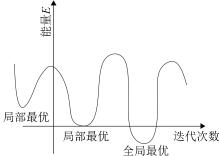
Fig. 2
Iteration diagram
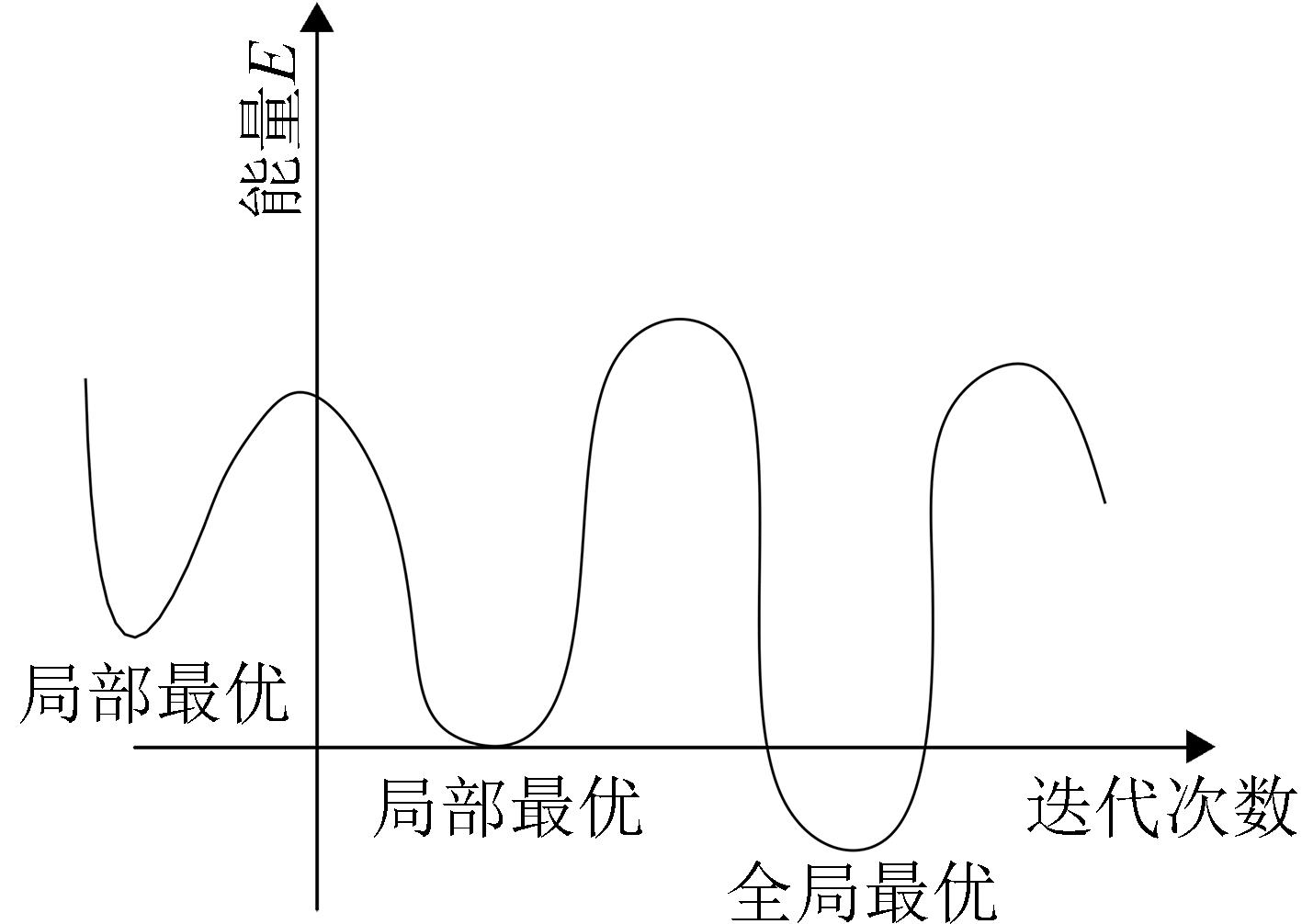
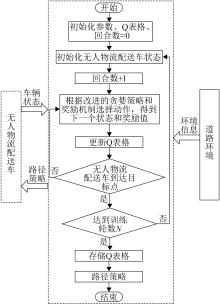
Fig. 3
Path planning training of improved Q-learning algorithm
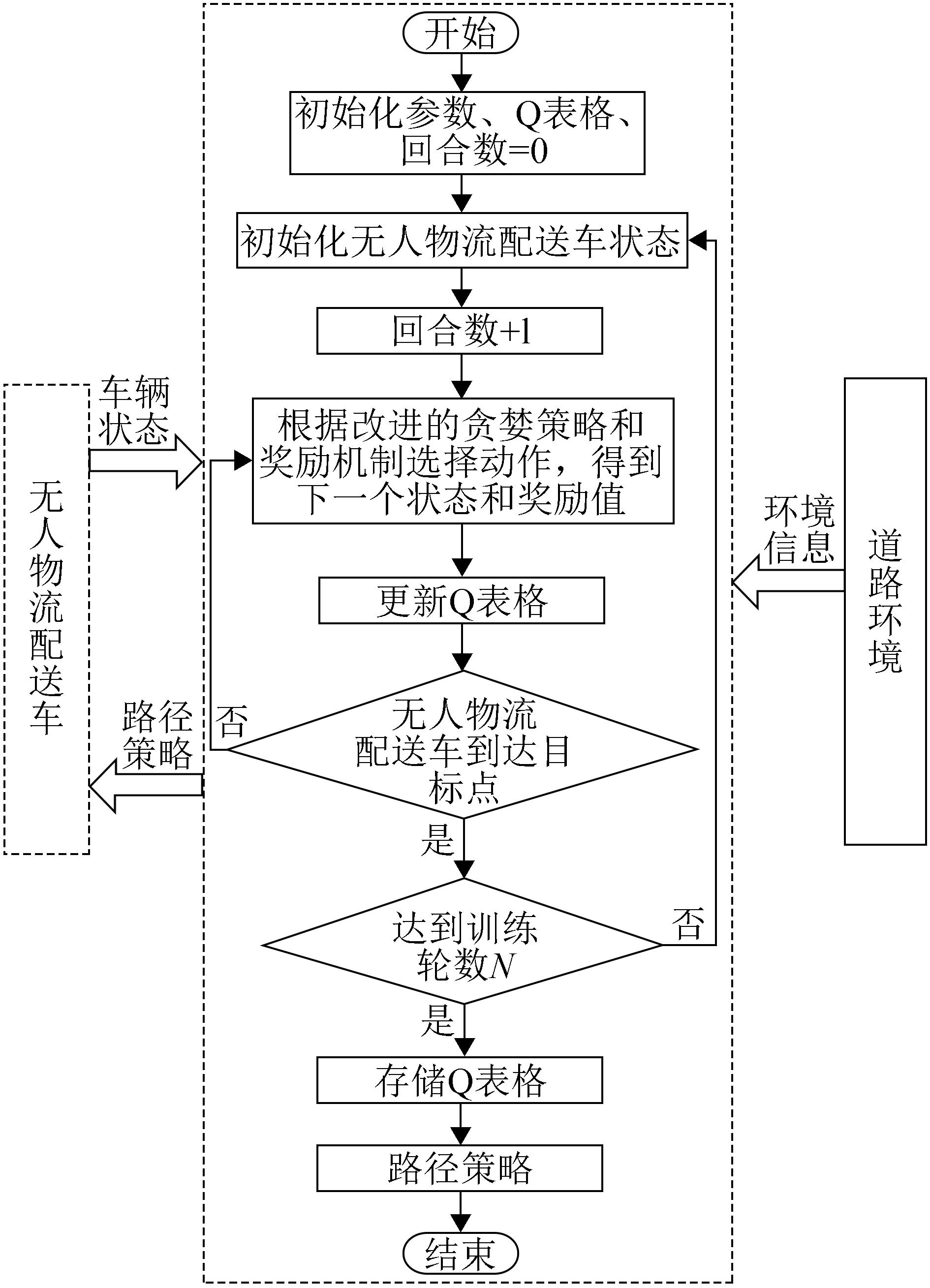
Table 1
Parameter setting
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 折扣率 | 0.9 | 比例因子 | 0.000 1 |
| 学习率 | 0.1 | 训练轮数 | 5 000 |
| 探索率 | 0.4 | 比例因子 | 42.192 5 |
| 初始探索率 | 0.4 | 比例因子 | |
| 最终探索率 | 0.001 | 目标点即时奖励 | 100 |
| 比例因子 |

Fig. 4
Map of a section in Chongqing

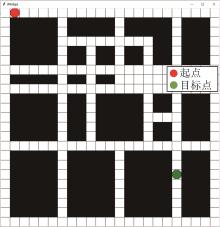
Fig. 5
Simulation environment grid map

Fig. 6
Paths planned by 3 algorithms
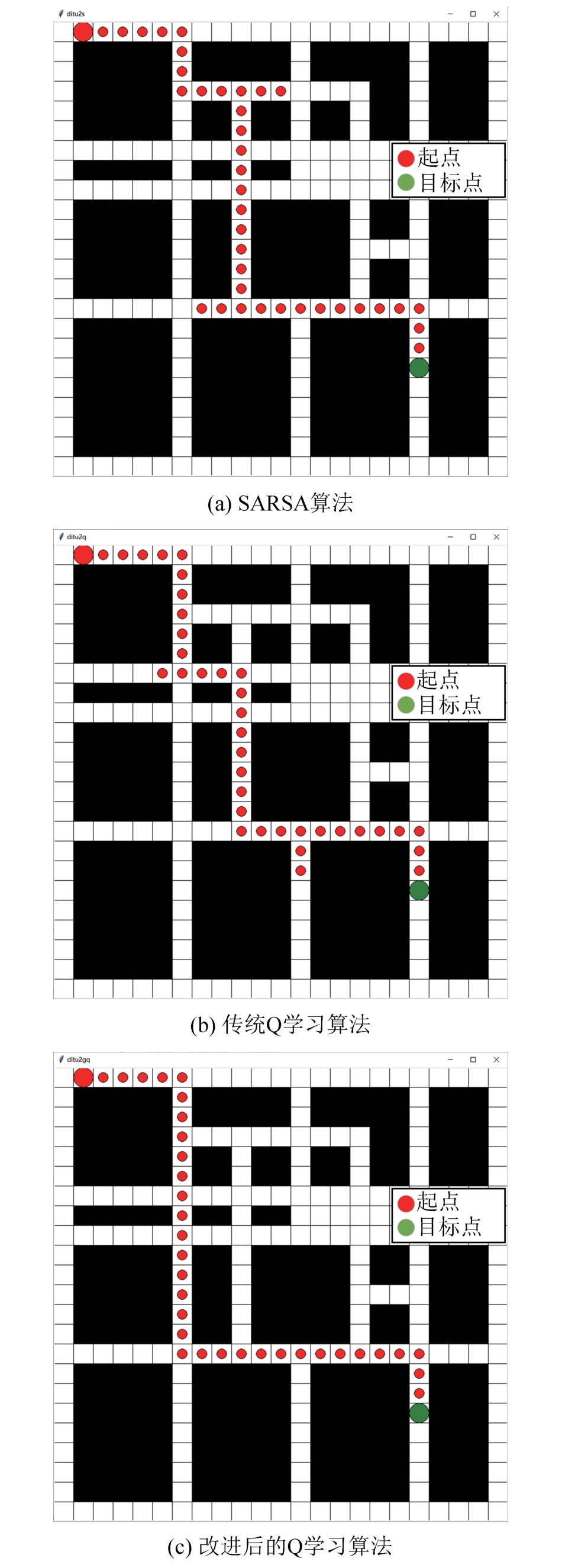
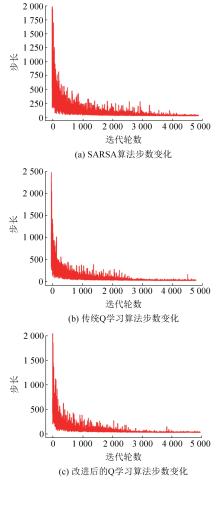
Fig. 7
Steps variation of 3 algorithms
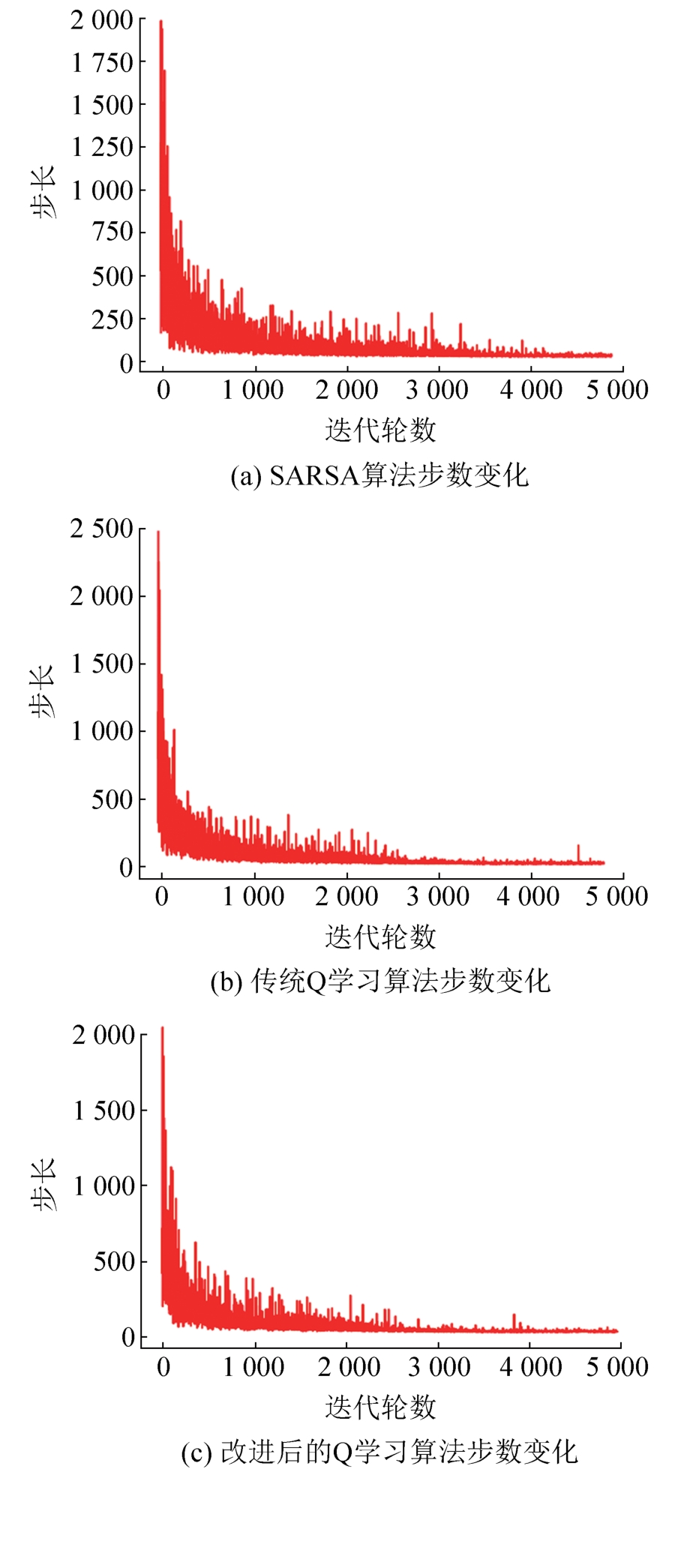

Fig. 8
Rewards variation of 3 algorithms
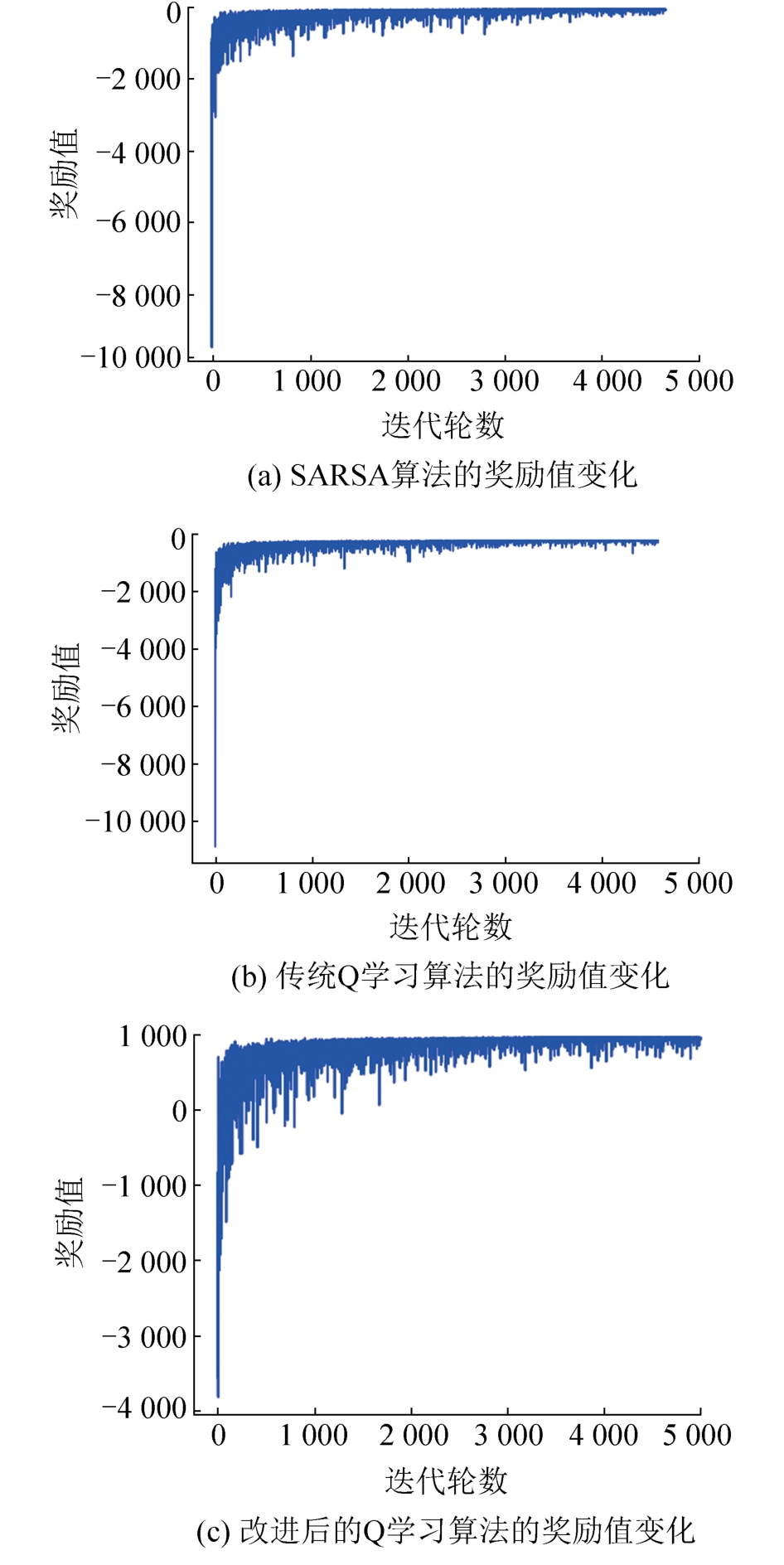
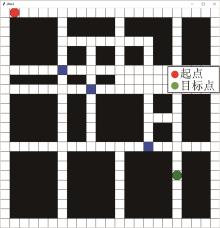
Fig. 9
Grid map under construction environment
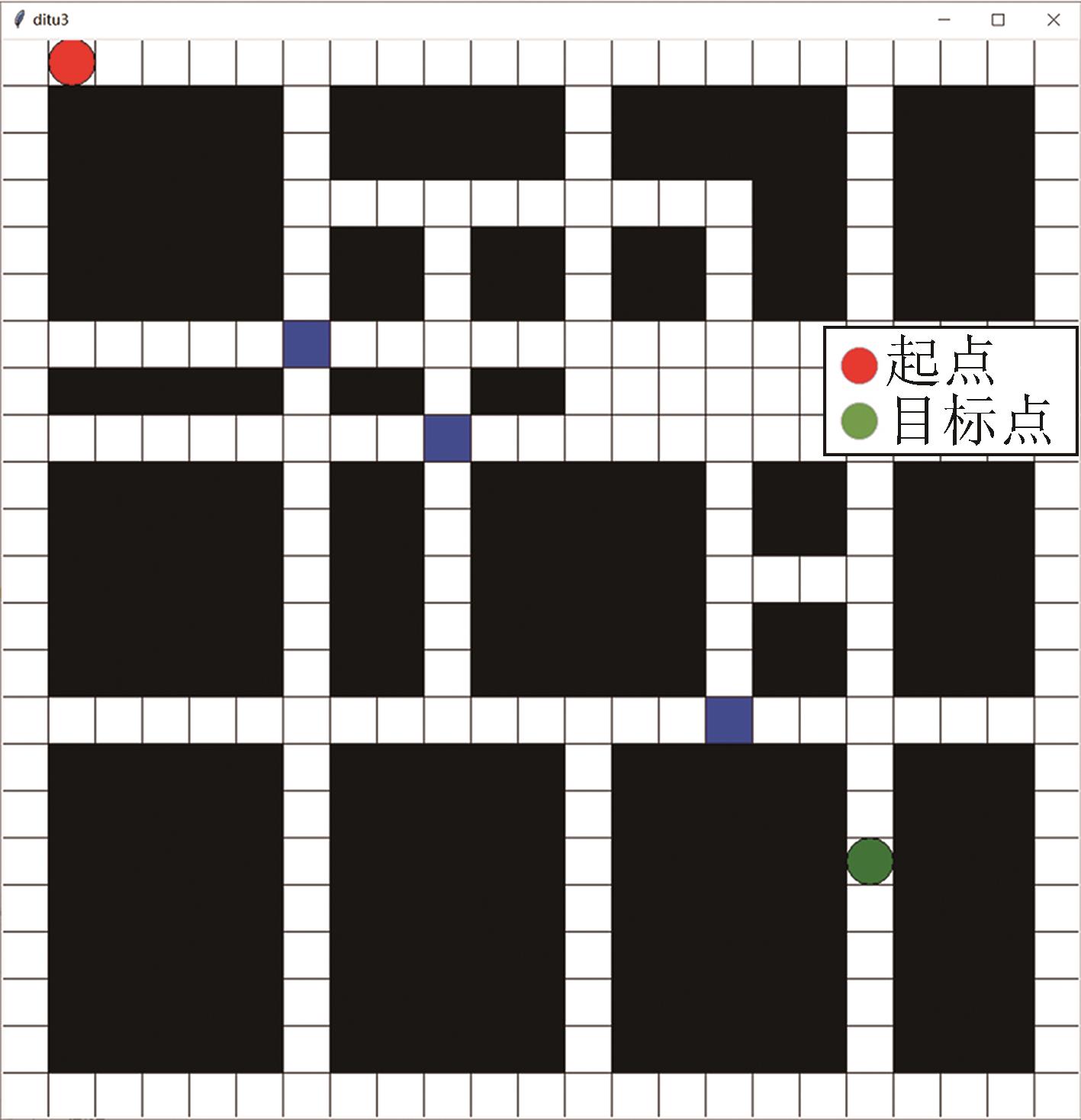

Fig. 10
Paths planned by 2 algorithms
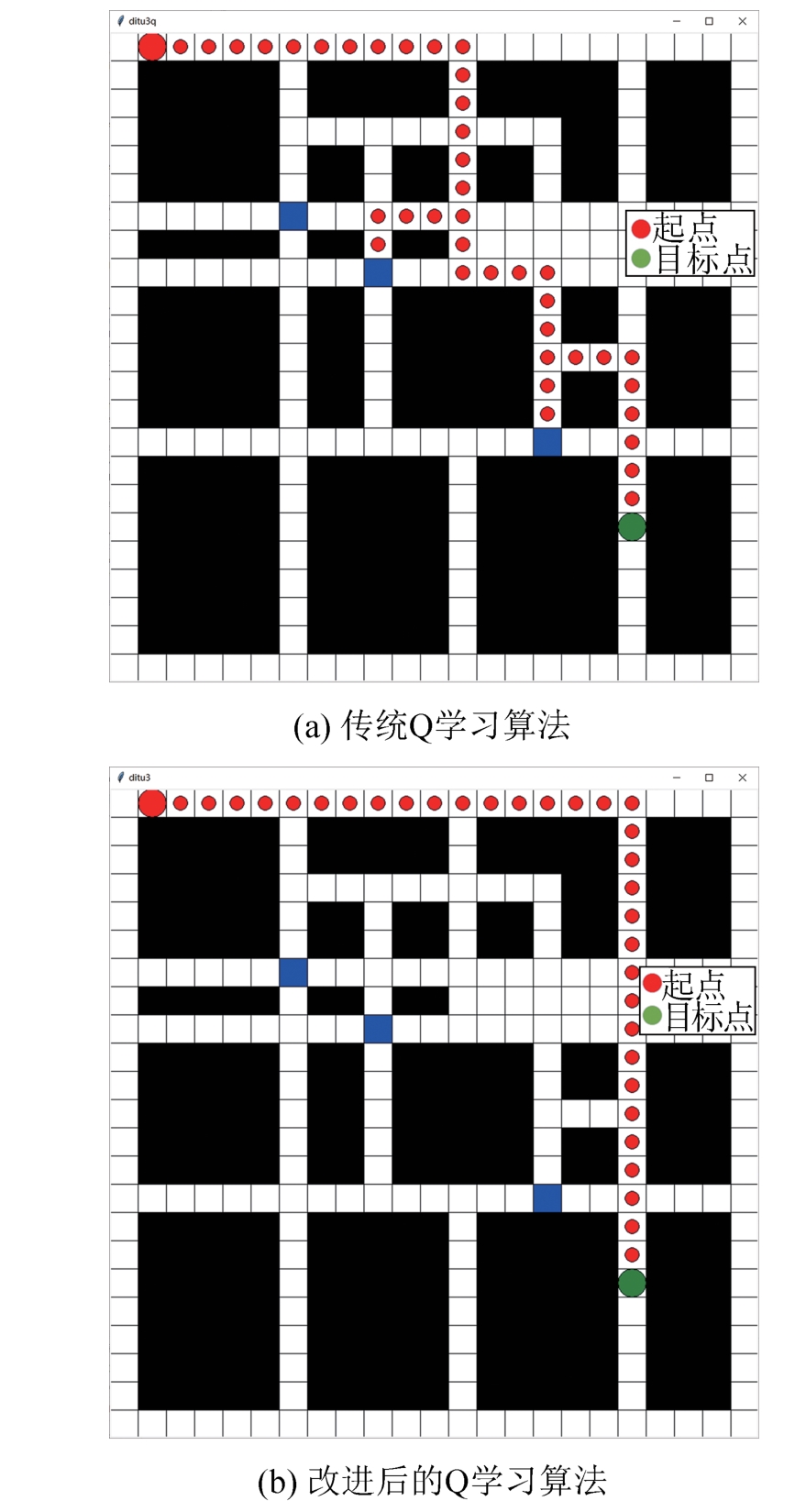

Fig. 11
Evaluation metrics for two algorithms during training
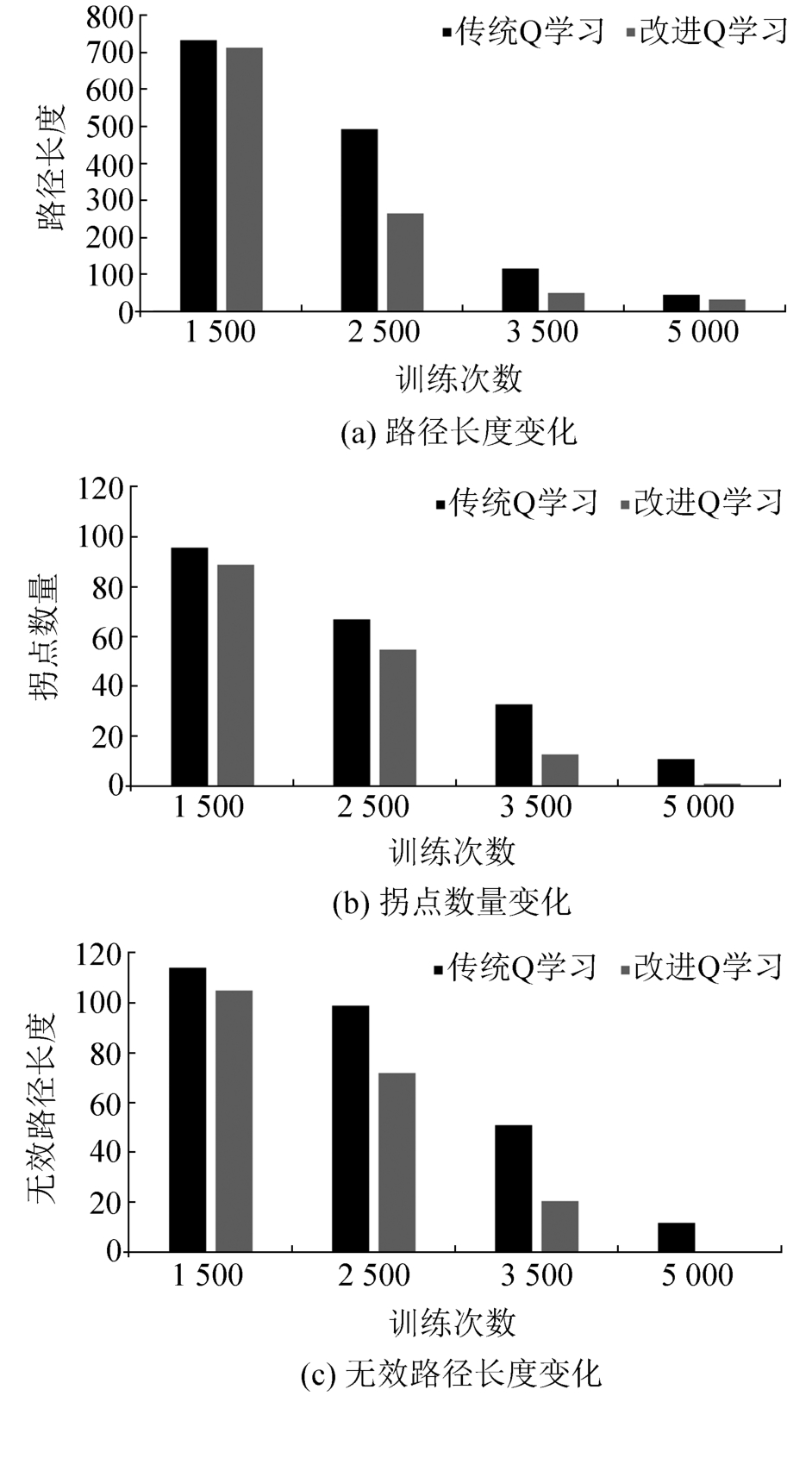
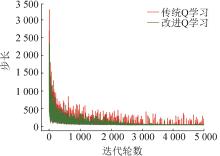
Fig. 12
Steps variation of two algorithms
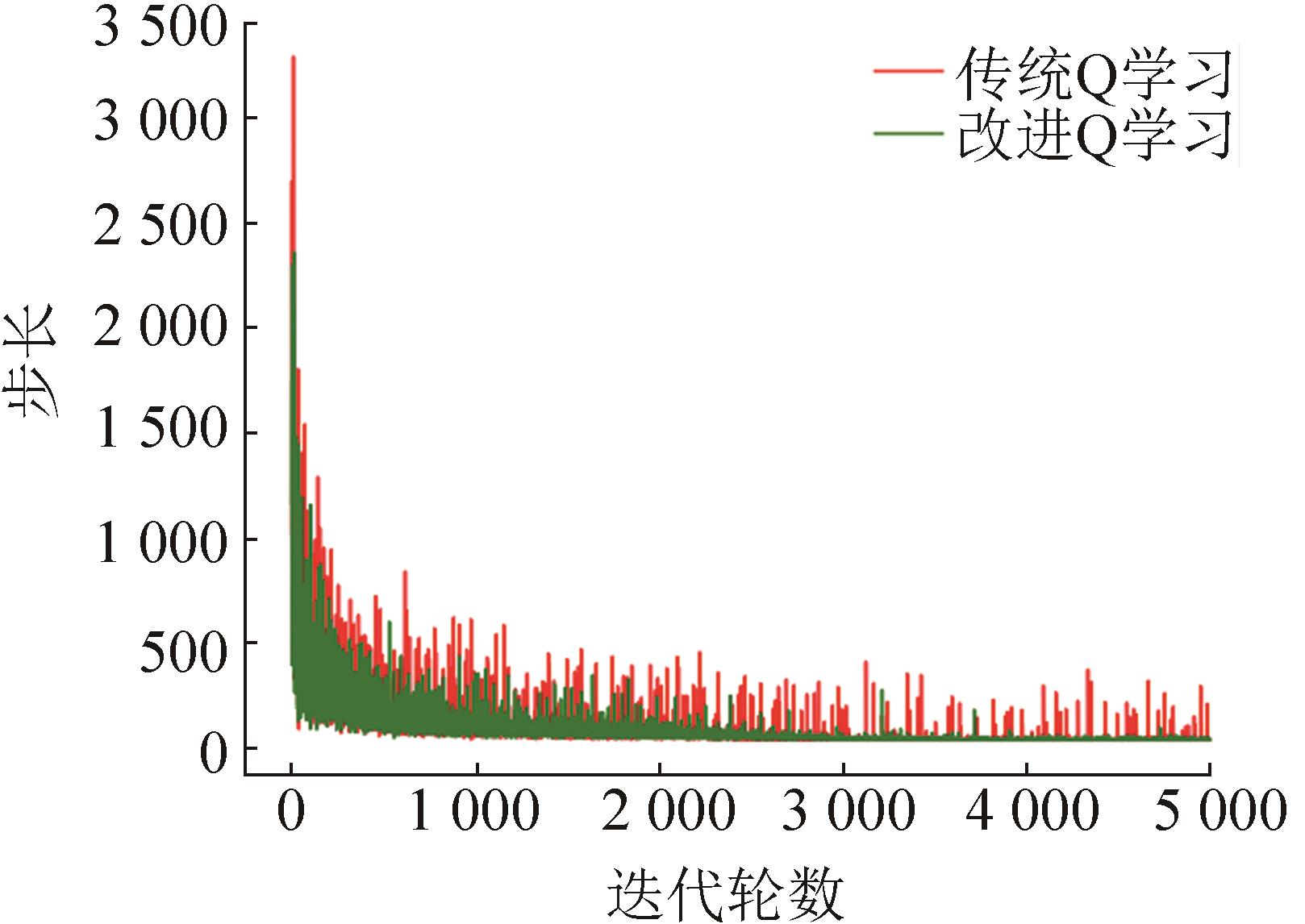
Fig. 13
Rewards variation of two algorithms
| 1 | 张辉, 张瑞亮, 许小庆, 等. 基于关键节点的改进A*无人车路径规划算法[J]. 汽车技术, 2023(3): 10-18. |
| Zhang Hui, Zhang Ruiliang, Xu Xiaoqing, et al. Key Nodes-based Improved A* Algorithm for Path Planning of Unmanned Vehicle[J]. Automobile Technology, 2023(3): 10-18. | |
| 2 | Li Xiaowei, Li Qing, Yin Chengqiang, et al. Autonomous Navigation Technology for Low-speed Small Unmanned Vehicle: An Overview[J]. World Electric Vehicle Journal, 2022, 13(9): 165. |
| 3 | 罗洁, 王中训, 潘康路, 等. 基于改进人工势场法的无人车路径规划算法[J]. 电子设计工程, 2022, 30(17): 90-94, 99. |
| Luo Jie, Wang Zhongxun, Pan Kanglu, et al. Unmanned Vehicle Path Planning Algorithm Based on Improved Artificial Potential Field Method[J]. Electronic Design Engineering, 2022, 30(17): 90-94, 99. | |
| 4 | 黄凯文, 赵煜, 黄玲, 等. 基于机械视觉的Arduino智能物流配送车[J]. 河南科技, 2021, 40(22): 19-23. |
| Huang Kaiwen, Zhao Yu, Huang Ling, et al. Arduino Intelligent Logistics Delivery Vehicle Based on Mechanical Vision[J]. Henan Science and Technology, 2021, 40(22): 19-23. | |
| 5 | Wu Yuzhan, Ding Yuanhao, Ding Susheng, et al. Autonomous Last-mile Delivery Based on the Cooperation of Multiple Heterogeneous Unmanned Ground Vehicles[J]. Mathematical Problems in Engineering, 2021, 2021: 5546581. |
| 6 | 刘珂, 董洪昭, 张丽梅, 等. 基于改进人工势场法的物流无人配送车路径规划[J]. 计算机应用研究, 2022, 39(11): 3287-3291. |
| Liu Ke, Dong Hongzhao, Zhang Limei, et al. Path Planning for Logistics Unmanned Delivery Vehicles Based on Improved Artificial Potential Field Method[J]. Application Research of Computers, 2022, 39(11): 3287-3291. | |
| 7 | Li Jianqiang, Sun Tao, Huang Xiaopeng, et al. A Memetic Path Planning Algorithm for Unmanned Air/Ground Vehicle Cooperative Detection Systems[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 2724-2737. |
| 8 | 翟丽, 张雪莹, 张闲, 等. 基于势场法的无人车局部动态避障路径规划算法[J]. 北京理工大学学报, 2022, 42(7): 696-705. |
| Zhai Li, Zhang Xueying, Zhang Xian, et al. Local Dynamic Obstacle Avoidance Path Planning Algorithm for Unmanned Vehicles Based on Potential Field Method[J]. Transactions of Beijing Institute of Technology, 2022, 42(7): 696-705. | |
| 9 | Jang Beakcheol, Kim Myeonghwi, Harerimana Gaspard, et al. Q-learning Algorithms: A Comprehensive Classification and Applications[J]. IEEE Access, 2019, 7: 133653-133667. |
| 10 | 李远哲, 胡纪滨. 强化学习在无人车领域的应用与展望[J]. 信息与控制, 2022, 51(2): 129-141. |
| Li Yuanzhe, Hu Jibin. Applications and Prospect of Reinforcement Learning in Unmanned Ground Vehicles[J]. Information and Control, 2022, 51(2): 129-141. | |
| 11 | 杨秀霞, 高恒杰, 刘伟, 等. 基于阶段Q学习算法的机器人路径规划[J]. 兵器装备工程学报, 2022, 43(5): 197-203. |
| Yang Xiuxia, Gao Hengjie, Liu Wei, et al. Robot Path Planning Based on Stage Q Learning Algorithm[J]. Journal of Ordnance Equipment Engineering, 2022, 43(5): 197-203. | |
| 12 | 张祥来, 江尚容, 罗芹. 基于改进Q学习算法的"货到人"系统AGV路径规划[J]. 现代计算机, 2022, 28(2): 62-66, 72. |
| Zhang Xianglai, Jiang Shangrong, Luo Qin. Research on AGV Path Planning of "Goods-to-person" System Based on Q-learning[J]. Modern Computer, 2022, 28(2): 62-66, 72. | |
| 13 | 赵也践, 王艳红, 张俊, 等. 改进Q学习算法在作业车间调度问题中的应用[J]. 系统仿真学报, 2022, 34(6): 1247-1258. |
| Zhao Yejian, Wang Yanhong, Zhang Jun, et al. Application of Improved Q Learning Algorithm in Job Shop Scheduling Problem[J]. Journal of System Simulation, 2022, 34(6): 1247-1258. | |
| 14 | Ee Soong Low, Ong Pauline, Cheng Yee Low, et al. Modified Q-learning with Distance Metric and Virtual Target on Path Planning of Mobile Robot[J]. Expert Systems with Applications, 2022, 199: 117191. |
| 15 | Konar Amit, Indrani Goswami Chakraborty, Sapam Jitu Singh, et al. A Deterministic Improved Q-learning for Path Planning of a Mobile Robot[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2013, 43(5): 1141-1153. |
| 16 | Zhao Meng, Lu Hui, Yang Siyi, et al. The Experience-memory Q-learning Algorithm for Robot Path Planning in Unknown Environment[J]. IEEE Access, 2020, 8: 47824-47844. |
| 17 | Zhang Lieping, Tang Liu, Zhang Shenglan, et al. A Self-adaptive Reinforcement-exploration Q-learning Algorithm[J]. Symmetry, 2021, 13(6): 1057. |
| 18 | Hu Yanming, Li Decai, He Yuqing, et al. Incremental Learning Framework for Autonomous Robots Based on Q-learning and the Adaptive Kernel Linear Model[J]. IEEE Transactions on Cognitive and Developmental Systems, 2022, 14(1): 64-74. |
| 19 | Ma Xin, Xu Ya, Sun Guoqiang, et al. State-chain Sequential Feedback Reinforcement Learning for Path Planning of Autonomous Mobile Robots[J]. Journal of Zhejiang University Science C, 2013, 14(3): 167-178. |
| 20 | Shang Erke, Dai Bin, Nie Yiming, et al. An Improved A-star Based Path Planning Algorithm for Autonomous Land Vehicles[J]. International Journal of Advanced Robotic Systems, 2020, 17(5): 1729881420962263. |
| 21 | Tang Gang, Tang Congqiang, Claramunt Christophe, et al. Geometric A-star Algorithm: An Improved A-star Algorithm for AGV Path Planning in a Port Environment[J]. IEEE Access, 2021, 9: 59196-59210. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
