

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (5): 1199-1210.doi: 10.16182/j.issn1004731x.joss.22-1546
Previous Articles Next Articles
Liu Zesen( ), Bi Sheng(), Guo Chuanhong, Wang Yankui, Dong Min
), Bi Sheng(), Guo Chuanhong, Wang Yankui, Dong Min
Received:2022-12-29
Revised:2023-03-06
Online:2024-05-15
Published:2024-05-21
Contact:
Bi Sheng
E-mail:ftyg@live.com;picy@scut.edu.cn
CLC Number:
Liu Zesen, Bi Sheng, Guo Chuanhong, Wang Yankui, Dong Min. Deep Learning Based Local Path Planning Method for Moving Robots[J]. Journal of System Simulation, 2024, 36(5): 1199-1210.
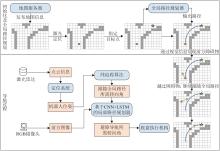
Fig. 1
Structure of deep learning based local path planner
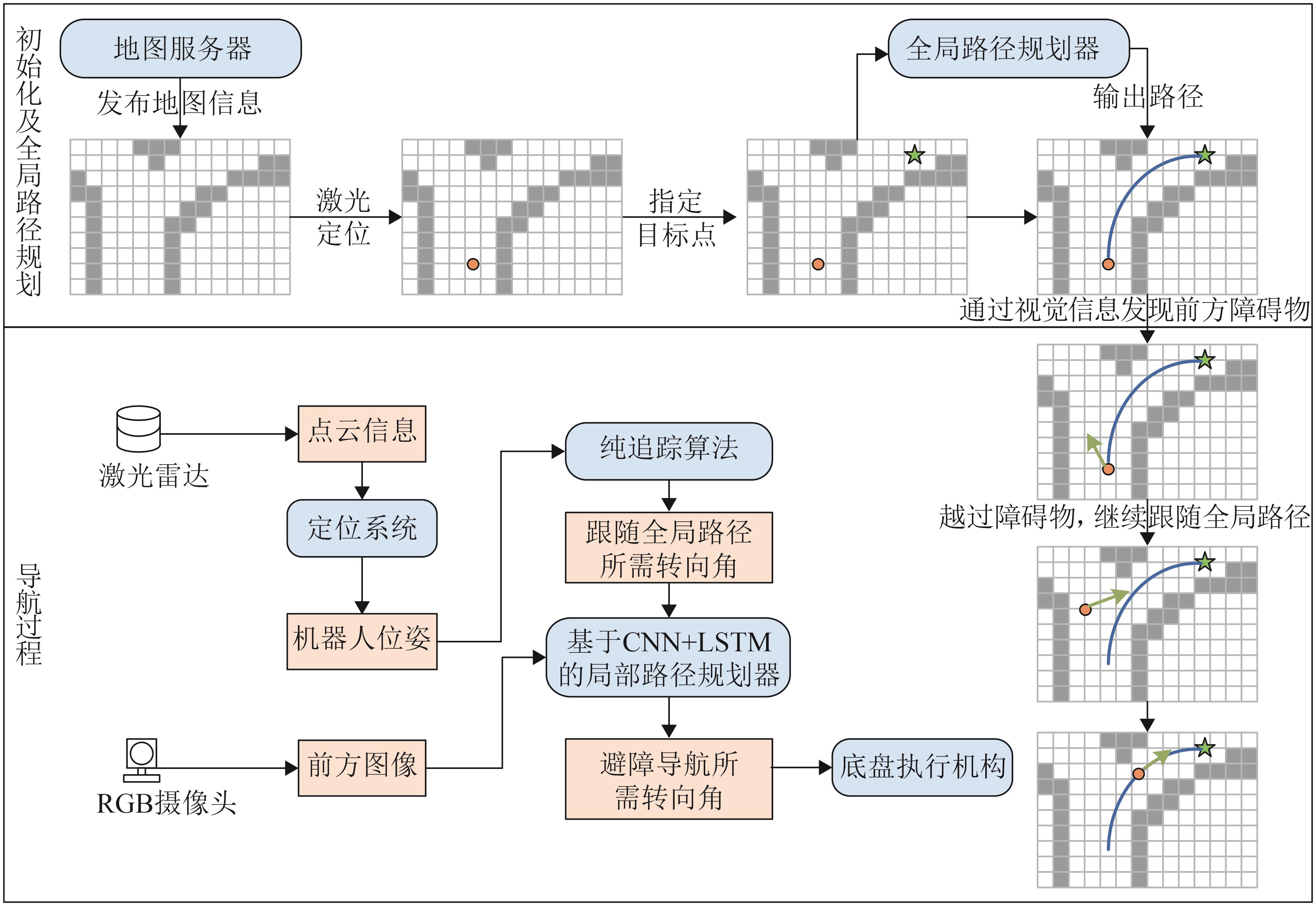
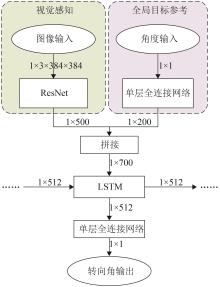
Fig. 2
Structure of neural network for path planning
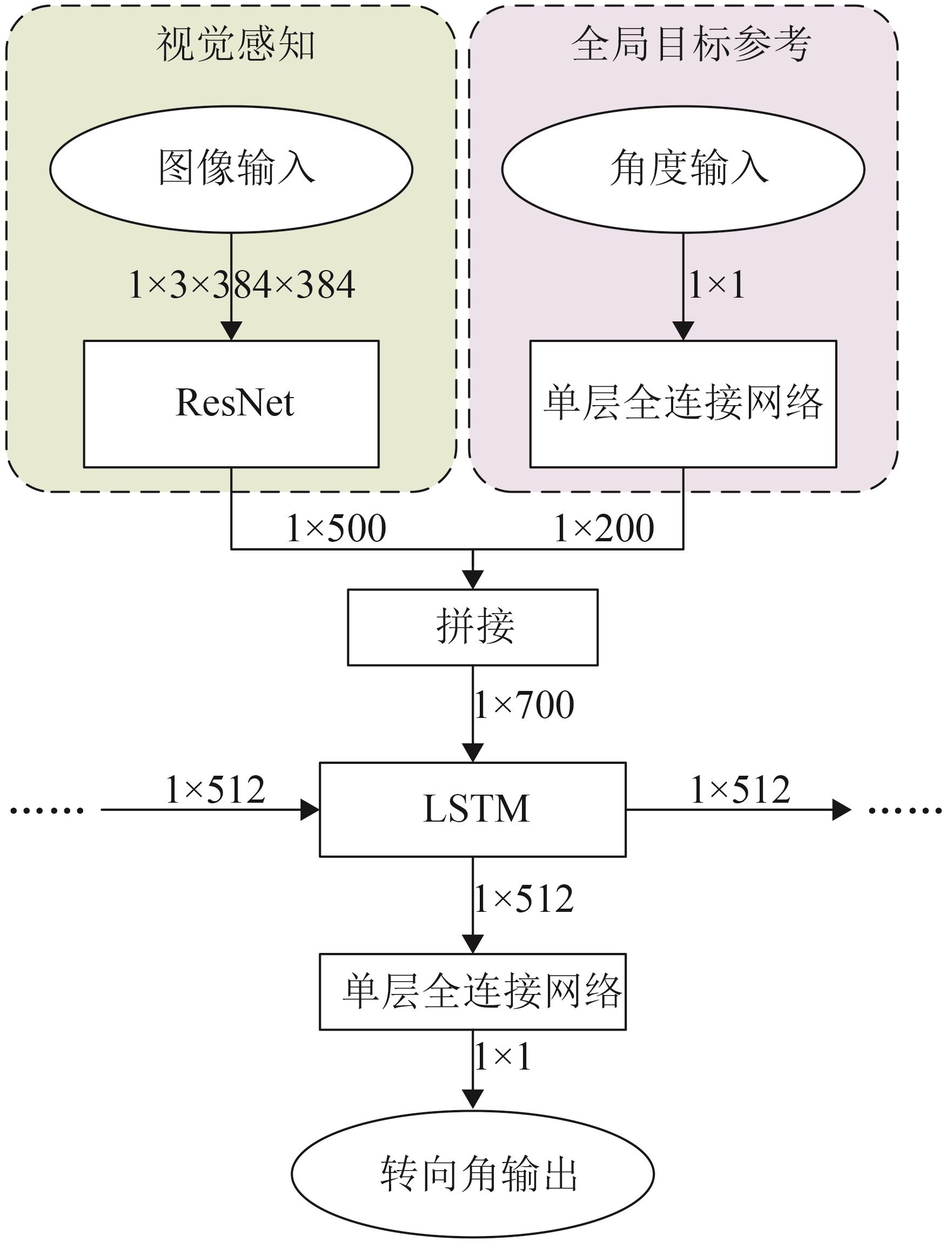
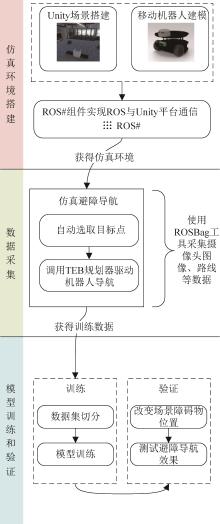
Fig. 3
Technology roadmap for model implementation and simulation
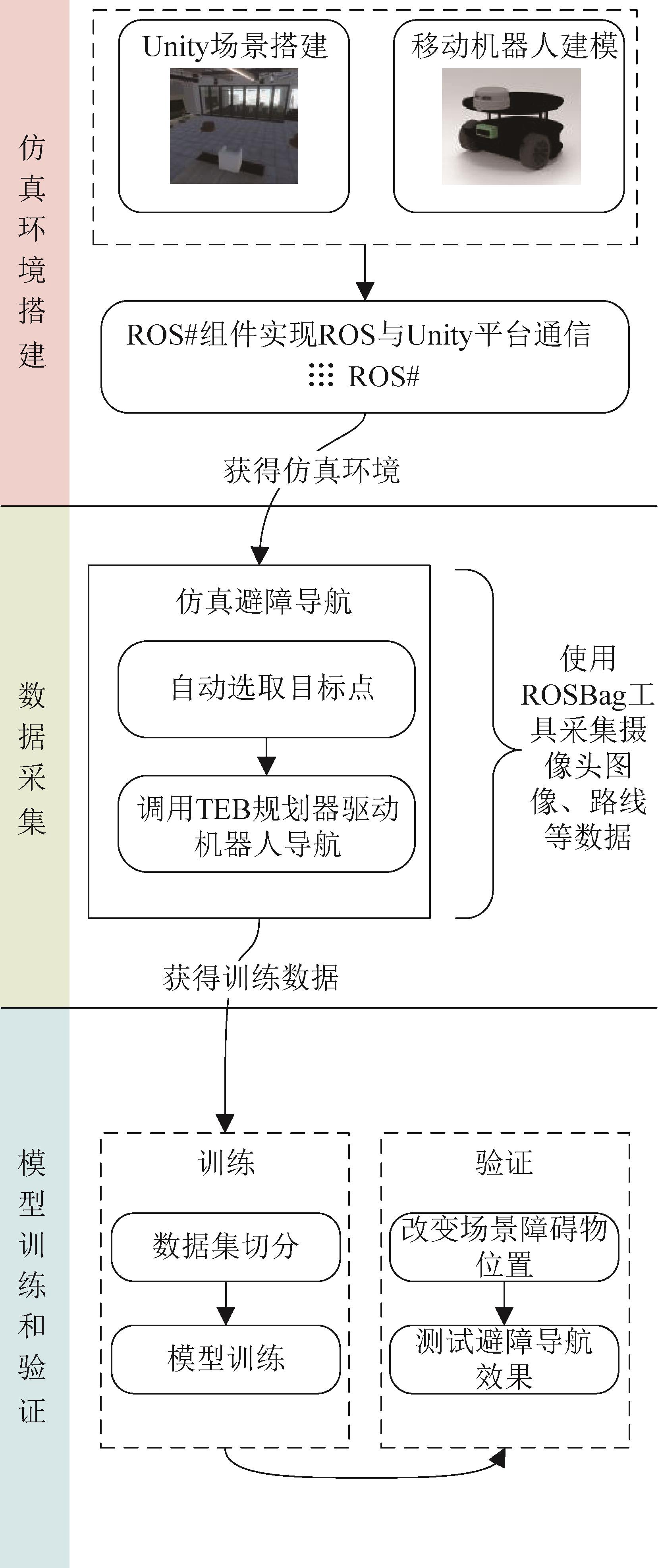

Fig. 4
Empty scene for map building and training scene with obstacles added
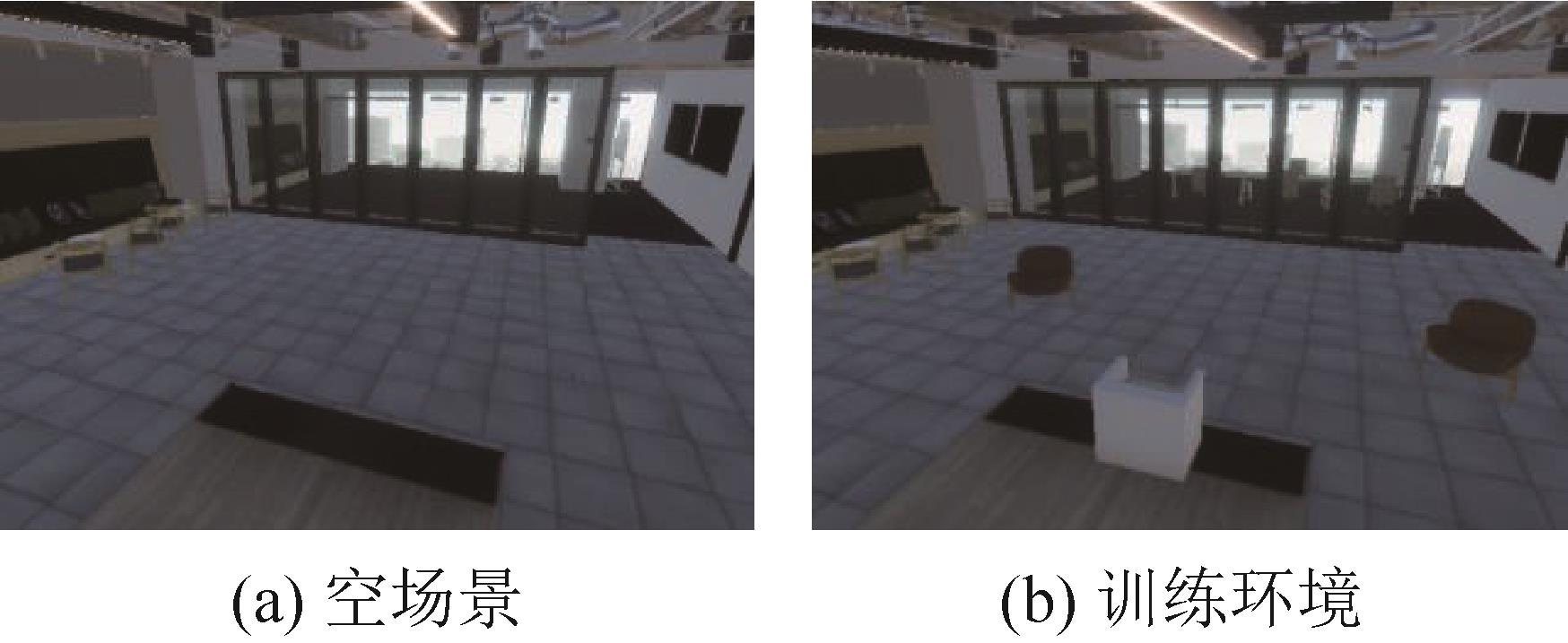
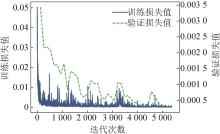
Fig. 5
Loss value of the training set and test set
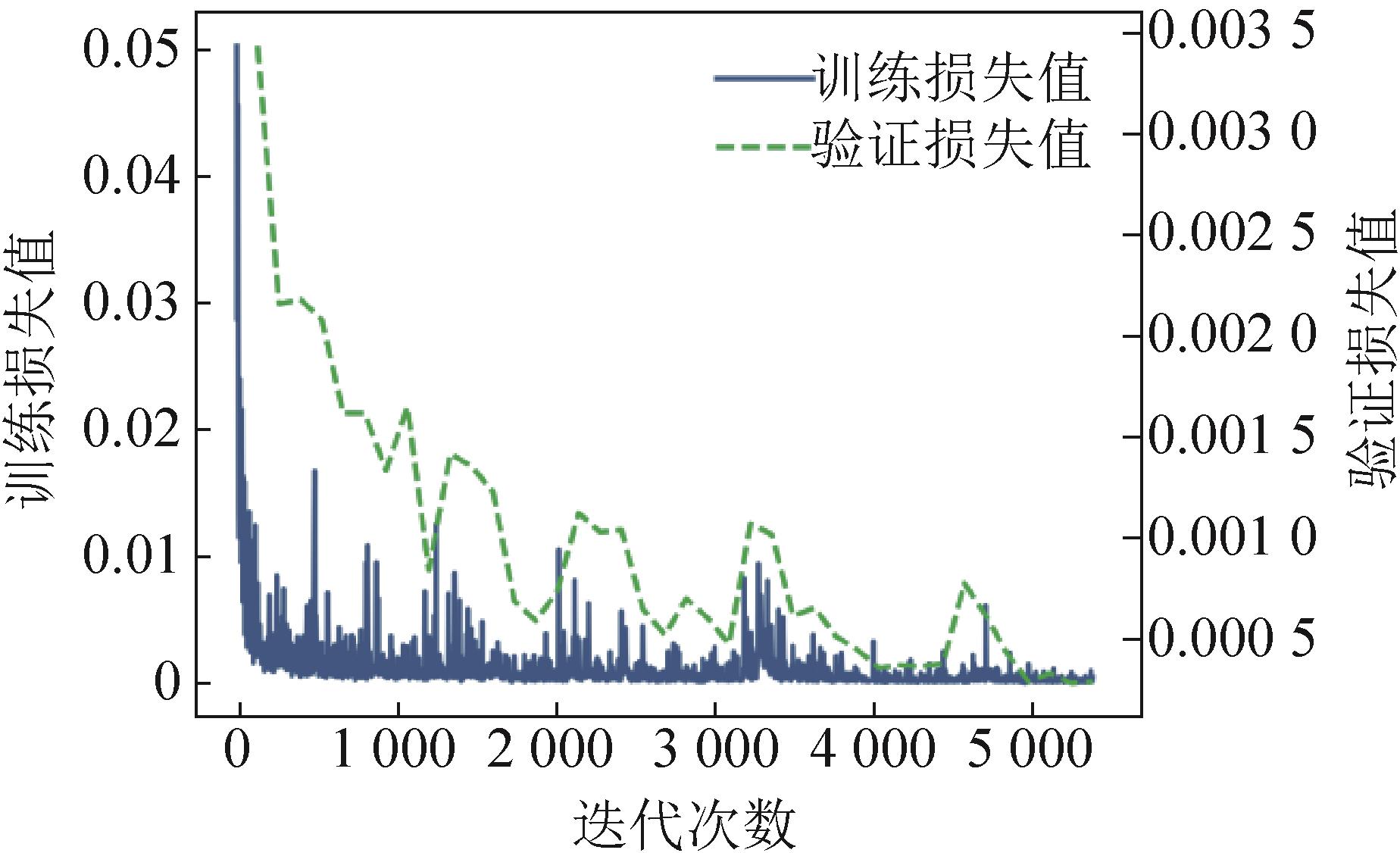
Fig. 6
Test scene after adjusting placement of obstacles


Fig. 7
Test of ability for obstacle avoidance and global path following in simulation
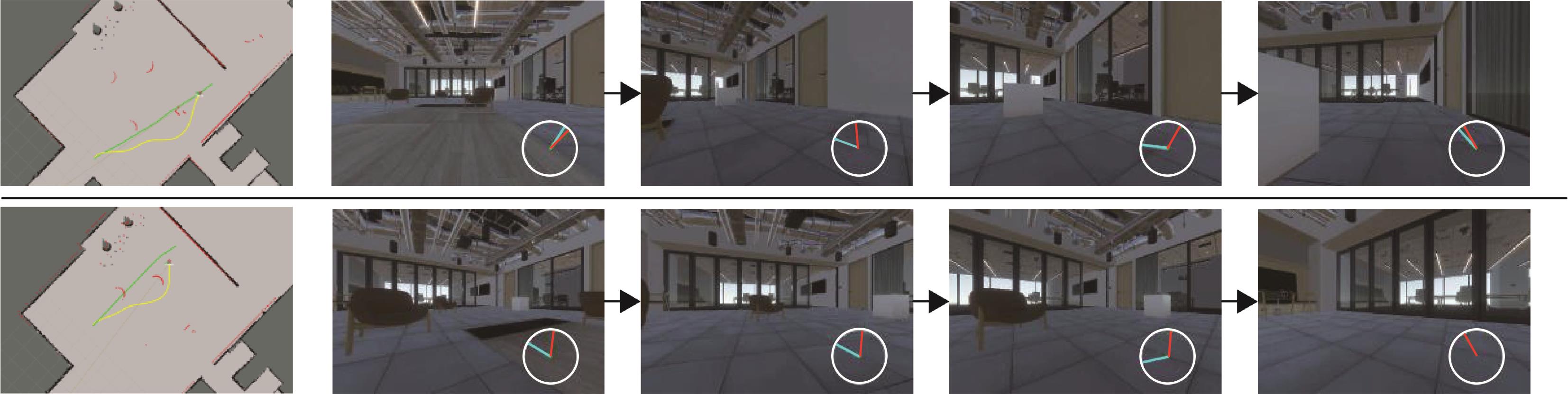
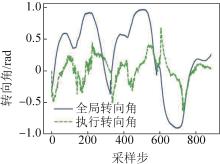
Fig. 8
Global steering angle and actual steering angle during obstacle avoidance and navigation
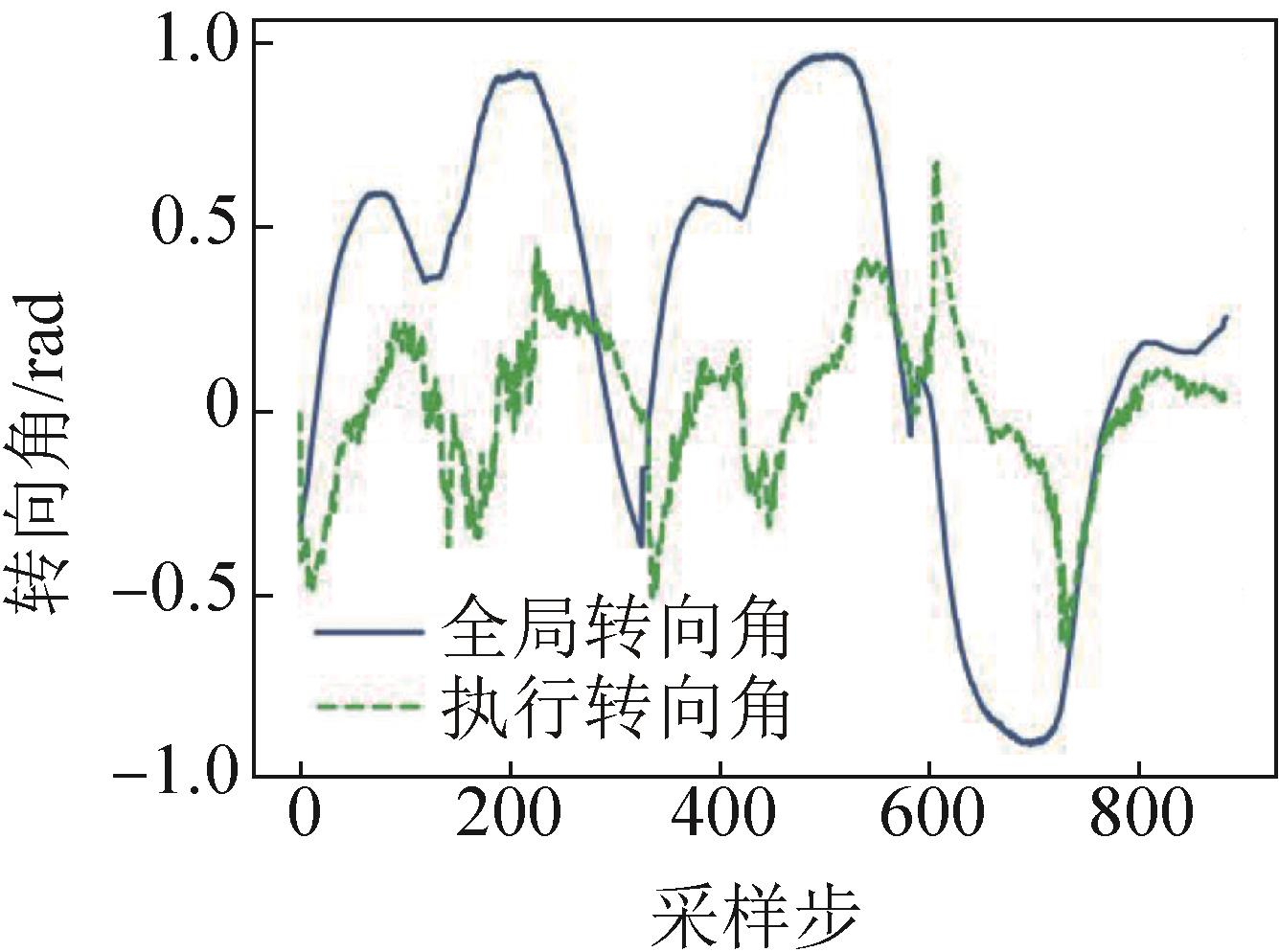
Fig. 9
Five routes designed for test in simulation
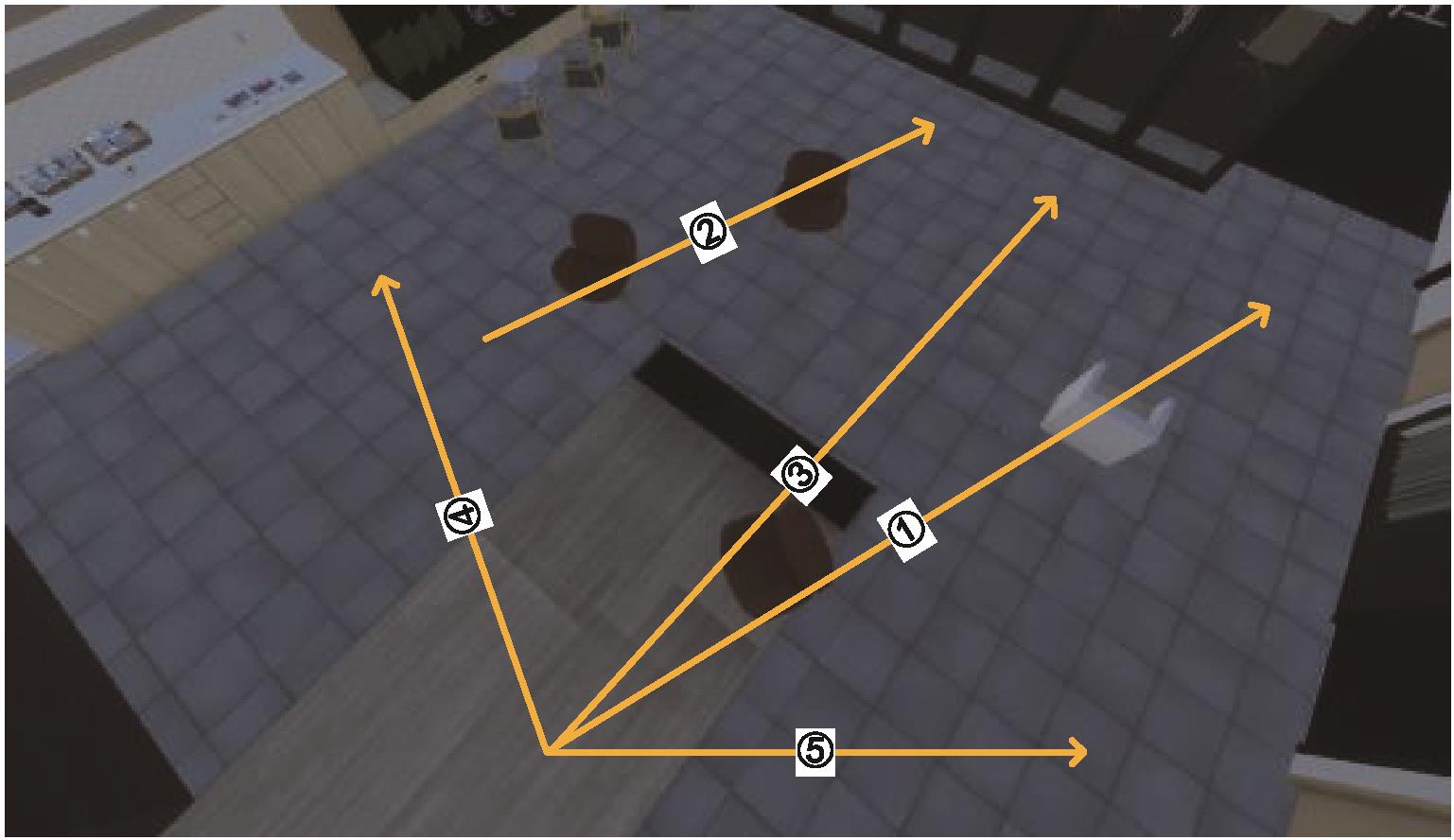
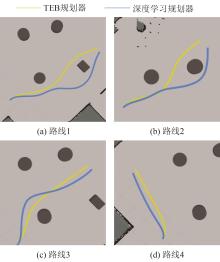
Fig. 10
Navigation paths performed by two planners in test route
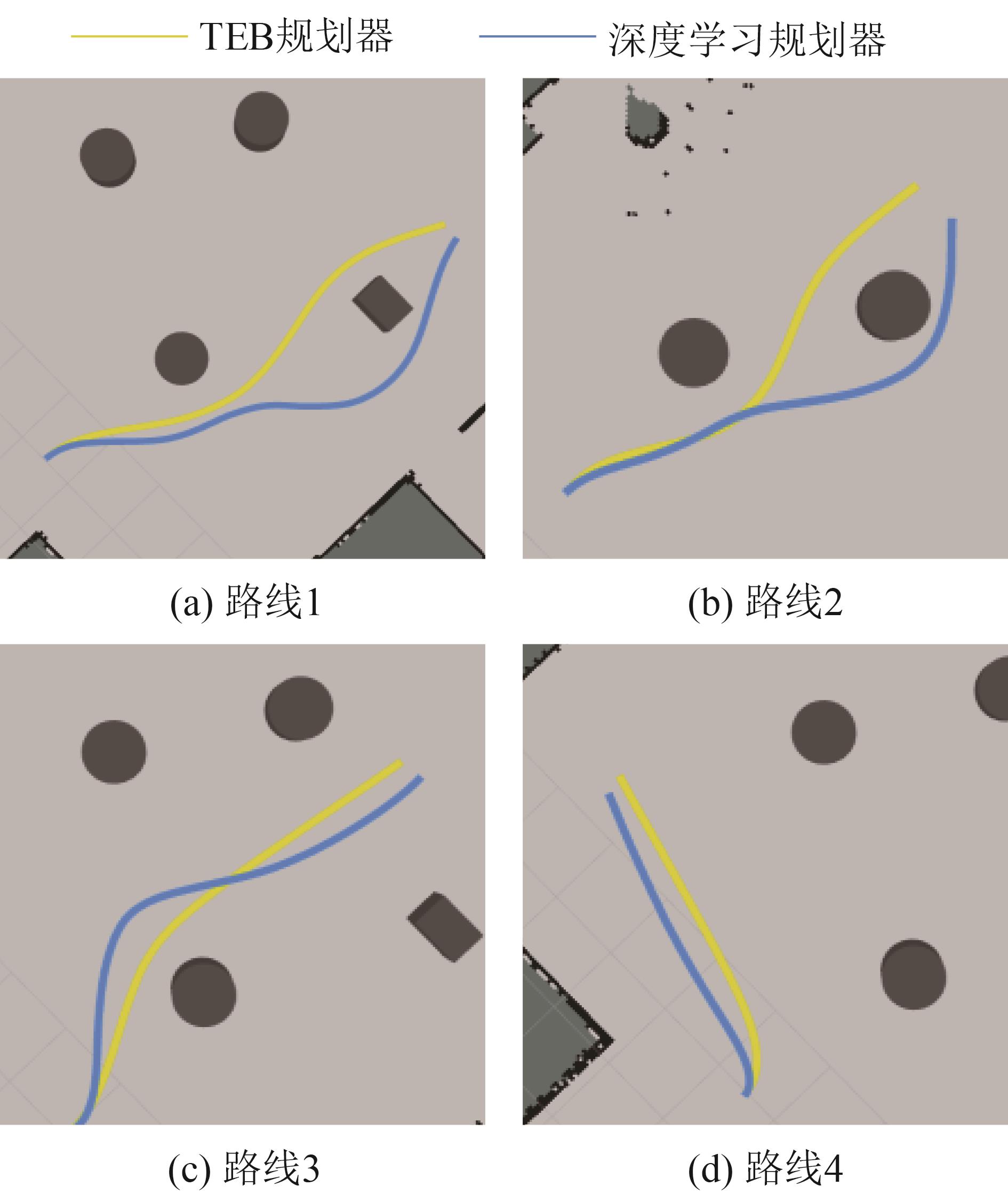
Table 1
Metric data for two planners in tests
| 指标 | 测试路线1 | 测试路线2 | 测试路线3 | 测试路线4 | 测试路线5 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| TEB | DL | TEB | DL | TEB | DL | TEB | DL | TEB | DL | |
| 长度/m | 7.35 | 7.91 | 5.77 | 6.23 | 6.71 | 7.25 | 4.52 | 4.29 | 2.86 | 2.54 |
| 平均曲率变化率 | 0.29 | 0.41 | 0.37 | 0.40 | 0.18 | 0.37 | 0.26 | 0.26 | 0.33 | 0.39 |
| 最近障碍物/m | 0.44 | 0.36 | 0.42 | 0.30 | 0.42 | 0.90 | n/a | n/a | n/a | n/a |

Fig. 11
Robot used for deploying proposed model


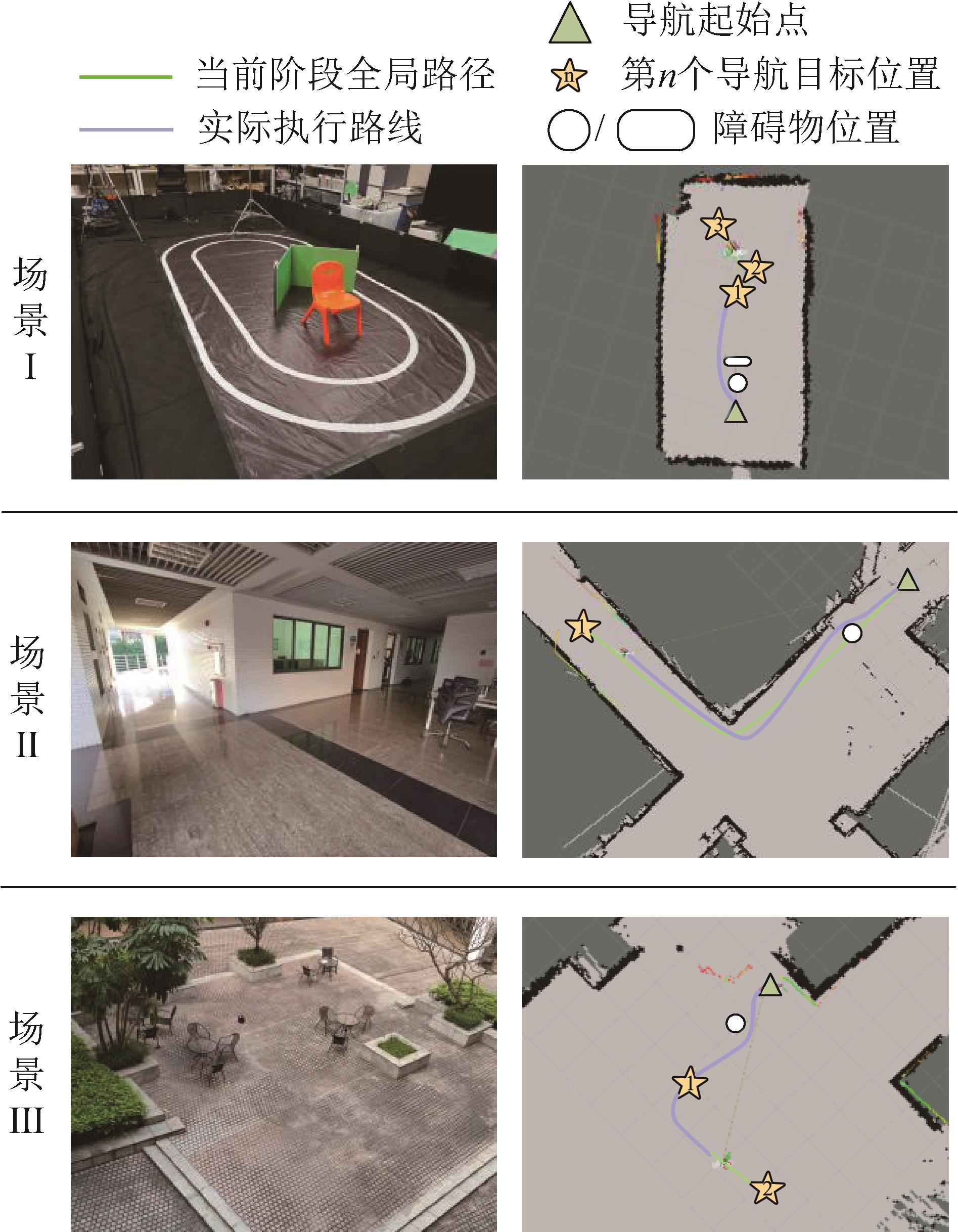
Fig. 12
Obstacle avoidance and navigation process of robot in real scene
| 1 | Hornung Armin, Phillips M, Gil Jones E, et al. Navigation in Three-dimensional Cluttered Environments for Mobile Manipulation[C]//2012 IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2012: 423-429. |
| 2 | 晋晓飞, 王浩, 宗卫佳, 等. 自主移动机器人避障技术研究现状[J]. 传感器与微系统, 2018, 37(5): 5-9. |
| Jin Xiaofei, Wang Hao, Zong Weijia, et al. Research Status of Obstacle Avoidance Technologies for Autonomous Mobile Robots[J]. Transducer and Microsystem Technologies, 2018, 37(5): 5-9. | |
| 3 | Lee H Y, Ho H W, Zhou Y. Deep Learning-based Monocular Obstacle Avoidance for Unmanned Aerial Vehicle Navigation in Tree Plantations[J]. Journal of Intelligent & Robotic Systems, 2021, 101(1): 5. |
| 4 | Sina Sharif Mansouri, Karvelis Petros, Kanellakis Christoforos, et al. Vision-based MAV Navigation in Underground Mine Using Convolutional Neural Network[C]//IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society. Piscataway, NJ, USA: IEEE, 2019: 750-755. |
| 5 | Manderson Travis, Juan Camilo Gamboa Higuera, Cheng Ran, et al. Vision-based Autonomous Underwater Swimming in Dense Coral for Combined Collision Avoidance and Target Selection[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2018: 1885-1891. |
| 6 | Loquercio Antonio, Maqueda Ana I, del-Blanco Carlos R, et al. DroNet: Learning to Fly by Driving[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 1088-1095. |
| 7 | Tai Lei, Li Shaohua, Liu Ming. A Deep-network Solution Towards Model-less Obstacle Avoidance[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2016: 2759-2764. |
| 8 | Liu Canglong, Zheng Bin, Wang Chunyang, et al. CNN-based Vision Model for Obstacle Avoidance of Mobile Robot[C]//2017 3rd International Conference on Mechanical, Electronic and Information Technology Engineering. France: EDP Sciences, 2017: 7. |
| 9 | 金彦亮, 朱容廷. 机器人端到端视觉避障方法研究[J]. 工业控制计算机, 2019, 32(9): 77-79. |
| Jin Yanliang, Zhu Rongting. Research on Robot End-to-end Visual Obstacle Avoidance Method[J]. Industrial Control Computer, 2019, 32(9): 77-79. | |
| 10 | Michels J, Saxena A, Ng A Y. High Speed Obstacle Avoidance Using Monocular Vision and Reinforcement Learning[C]//Proceedings of the 22nd International conference on Machine learning. New York, NY, USA: Association for Computing Machinery, 2005: 593-600. |
| 11 | Xie L, Wang S, Markham A, et al. Towards Monocular Vision Based Obstacle Avoidance Through Deep Reinforcement Learning[C]//Robotics: Science and Systems (RSS 2017) Workshop. Boston, MA, USA: MIT, 2017: 1-6. |
| 12 | Guldenring Ronja, Görner Michael, Hendrich Norman, et al. Learning Local Planners for Human-aware Navigation in Indoor Environments[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2020: 6053-6060. |
| 13 | Craig Coulter R. Implementation of the Pure Pursuit Path Tracking Algorithm: CMU-RI-TR-92-01[R]. Pittsburgh, PA, USA: Carnegie Mellon University, 1992: 1-15. |
| 14 | Zhang Chao, Yang Zichao, He Xiaodong, et al. Multimodal Intelligence: Representation Learning, Information Fusion, and Applications[J]. IEEE Journal of Selected Topics in Signal Processing, 2020, 14(3): 478-493. |
| 15 | Hochreiter Sepp, Schmidhuber Jürgen. Long Short-term Memory[J]. Neural Computation, 1997, 9(8): 1735-1780. |
| 16 | Koenig N, Howard A. Design and Use Paradigms for Gazebo, an Open-source Multi-robot Simulator[C]//2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2004: 2149-2154. |
| 17 | Liu Yuzhou, Novotny Georg, Smirnov Nikita, et al. Mobile Delivery Robots: Mixed Reality-based Simulation Relying on ROS and Unity 3D[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Piscataway, NJ, USA: IEEE, 2020: 15-20. |
| 18 | Katara Pushkal, Khanna Mukul, Nagar Harshit, et al. Open Source Simulator for Unmanned Underwater Vehicles Using ROS and Unity3D[C]//2019 IEEE Underwater Technology (UT). Piscataway, NJ, USA: IEEE, 2019: 1-7. |
| 19 | Konrad A. Simulation of Mobile Robots with Unity and Ros: A Case-study and a Comparison with Gazebo[D]. Trollhättan, Sweden: University West, 2019. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Wang Jun, Liu Min, Zhang Xiaochuan, Ding Yishan, Feng Juhui, Zhuang Ye. Modelling Method of Unmanned Vehicle Dynamics Based on Neural Network [J]. Journal of System Simulation, 2026, 38(4): 932-947. |
| [4] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [5] | Feng Xuejian, Ding Han, Tong Yiqi, Huo Chaoying, Zhang Yanjin. Simulation and Multi-perspective Recognition Algorithm for Typical Trajectory Shapes [J]. Journal of System Simulation, 2026, 38(3): 725-735. |
| [6] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [7] | Liu Peijin, Zhang Minxin, He Lin, Sun Yige, Su Tingqi. Research on Visual Place Recognition Algorithms for Complex Urban Environments [J]. Journal of System Simulation, 2026, 38(3): 818-828. |
| [8] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [9] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [10] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [11] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [12] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [13] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [14] | Wang Bingheng, Liu Tingrui, Yang Fan, Zhang Huan, Li Wei, Ma Ping, Yang Ming. Research on Requirements and Methods for Intelligent Assessment of Simulation Credibility [J]. Journal of System Simulation, 2025, 37(7): 1710-1722. |
| [15] | Chen Kun, Chen Liang, Xie Jiming, Liu Fengbo, Chen Taixiong, Wei Lukuan. Simulation Study on Adaptive Signal Control of Deformed Intersection Based on LSTM-GNN [J]. Journal of System Simulation, 2025, 37(6): 1343-1351. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
