

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (12): 2945-2959.doi: 10.16182/j.issn1004731x.joss.23-1269
• Papers • Previous Articles Next Articles
Ai Gaohang, Li Chuntao
Received:2023-10-20
Revised:2023-12-15
Online:2024-12-20
Published:2024-12-20
Contact:
Li Chuntao
CLC Number:
Ai Gaohang, Li Chuntao. UAV Swarm Obstacle Avoidance Based on Visual Filed and Adaptive Radius[J]. Journal of System Simulation, 2024, 36(12): 2945-2959.

Fig. 1
Field view of ball outside obstacle
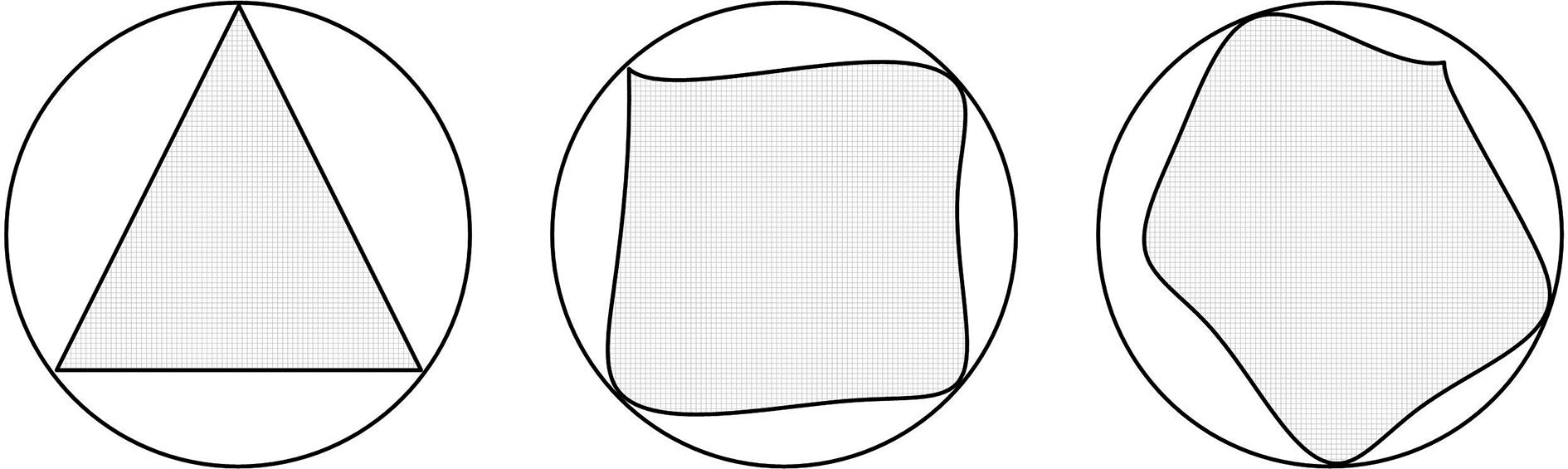
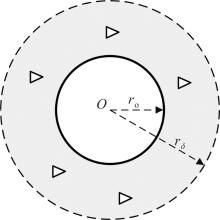
Fig. 2
Two-dimensional of influence area of obstacles
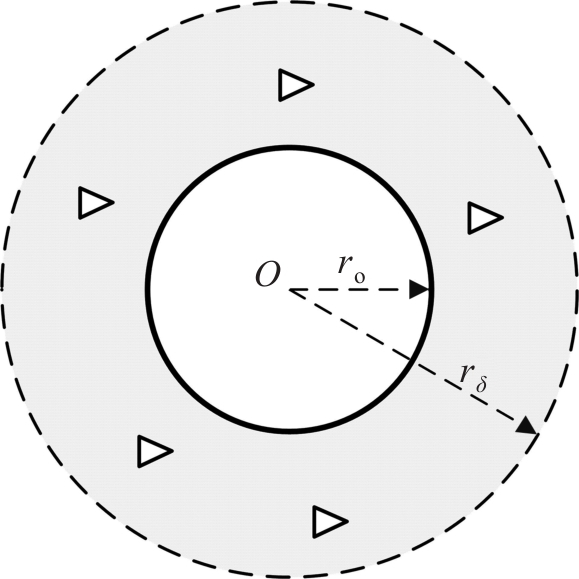
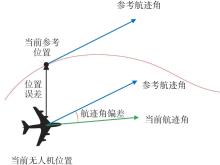
Fig. 3
Track route
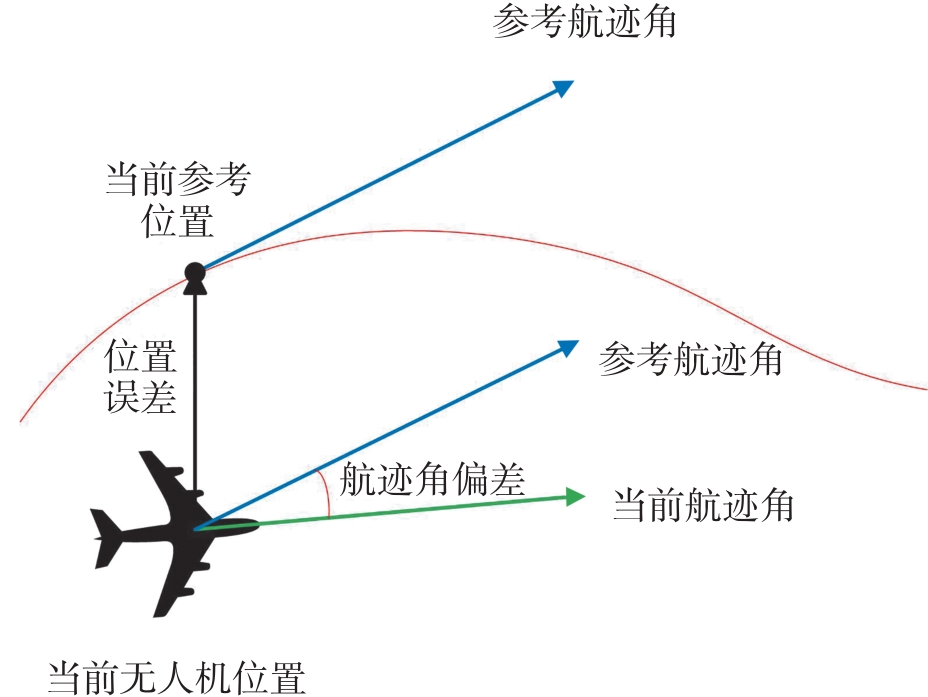
Fig. 4
Sectional diagram of adaptive radius
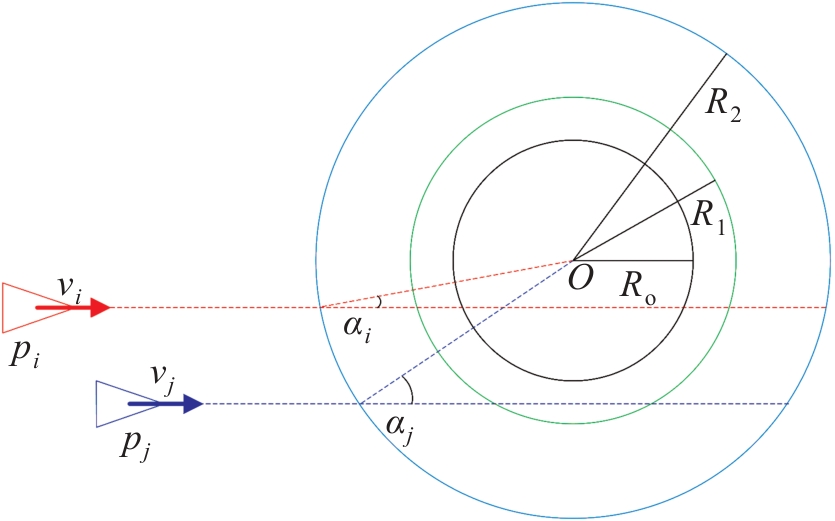

Fig. 5
UAV visual field diagram
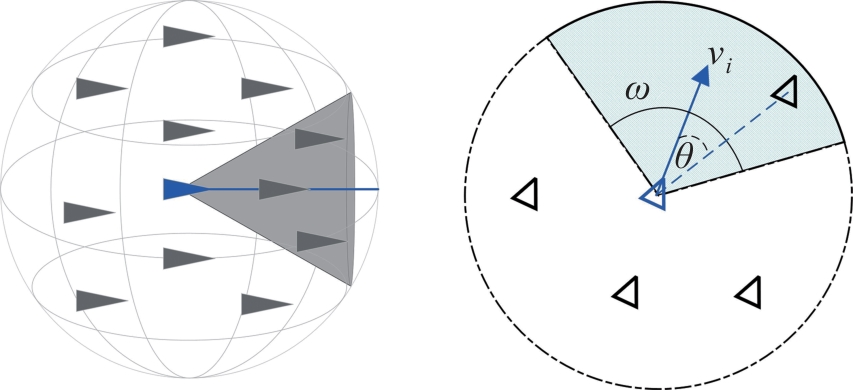

Fig. 6
Obstruction view diagram
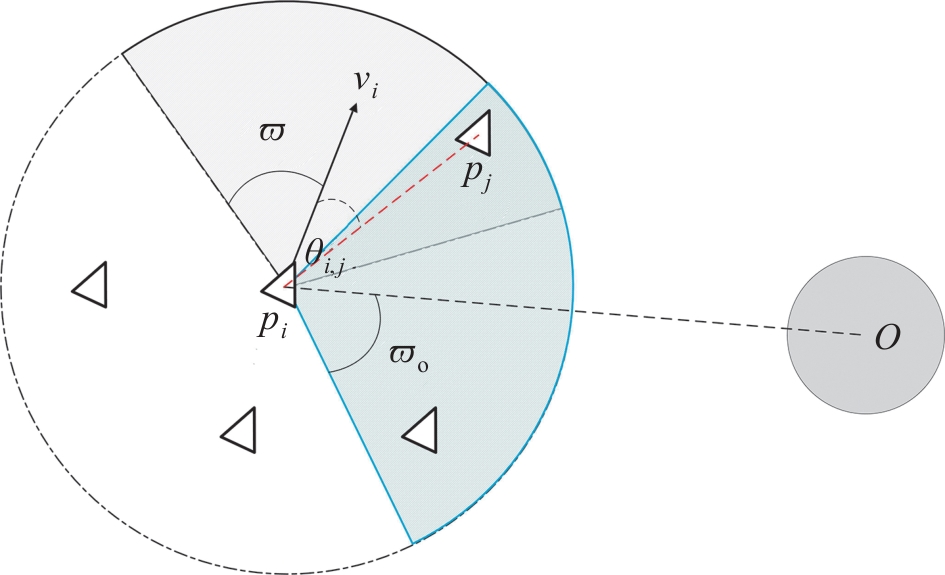
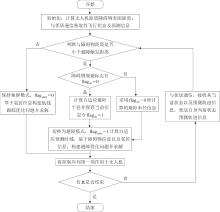
Fig. 7
Flow chart of obstacle avoidance algorithm
Table 1
UAV initial position
| 无人机序列 | 位置 | 航迹方位角/rad | 航迹倾斜角/rad |
|---|---|---|---|
| UAV1 | [248, 1, 401] | 0 | 0 |
| UAV2 | [184, 51, 401] | 0 | 0 |
| UAV3 | [184, -50, 401] | 0 | 0 |
| UAV4 | [184, 1, 452] | 0 | 0 |
| UAV5 | [184, 1, 350] | 0 | 0 |
| UAV6 | [184, 1, 400] | 0 | 0 |
| UAV7 | [120, 101, 400] | 0 | 0 |
| UAV8 | [120, -100, 400] | 0 | 0 |
| UAV9 | [120, 1, 502] | 0 | 0 |
| UAV10 | [120, 1, 299] | 0 | 0 |
| UAV11 | [120, 50, 451] | 0 | 0 |
| UAV12 | [120, 50, 350] | 0 | 0 |
| UAV13 | [120, -50, 451] | 0 | 0 |
| UAV14 | [120, -50, 350] | 0 | 0 |
| UAV15 | [120, 1, 400] | 0 | 0 |
| UAV16 | [56, 0, 400] | 0 | 0 |
| UAV17 | [56, 51, 400] | 0 | 0 |
| UAV18 | [56, -51, 400] | 0 | 0 |
| UAV19 | [56, 0, 451] | 0 | 0 |
| UAV20 | [56, 0, 348] | 0 | 0 |
Table 2
Parameter settings
| 参数名称 | 集群模式 | 避障模式 |
|---|---|---|
| 1 | 1 | |
| 0.2 | 0.08 | |
| 0.1 | 0.003 | |
| 20 000 | 60 000 | |
| 10 000 | 4 000 | |
| 1 000 | 100 | |
| 1 000 | 100 | |
| 100 | 100 | |
| 100 | 100 | |
| 10 000 | 25 000 | |
| 0 | 100 000 | |
| 10 000 | 0 | |
| 10 000 | 0 |
Fig. 8
Scene Ⅰ simulation diagram of VFAOAR
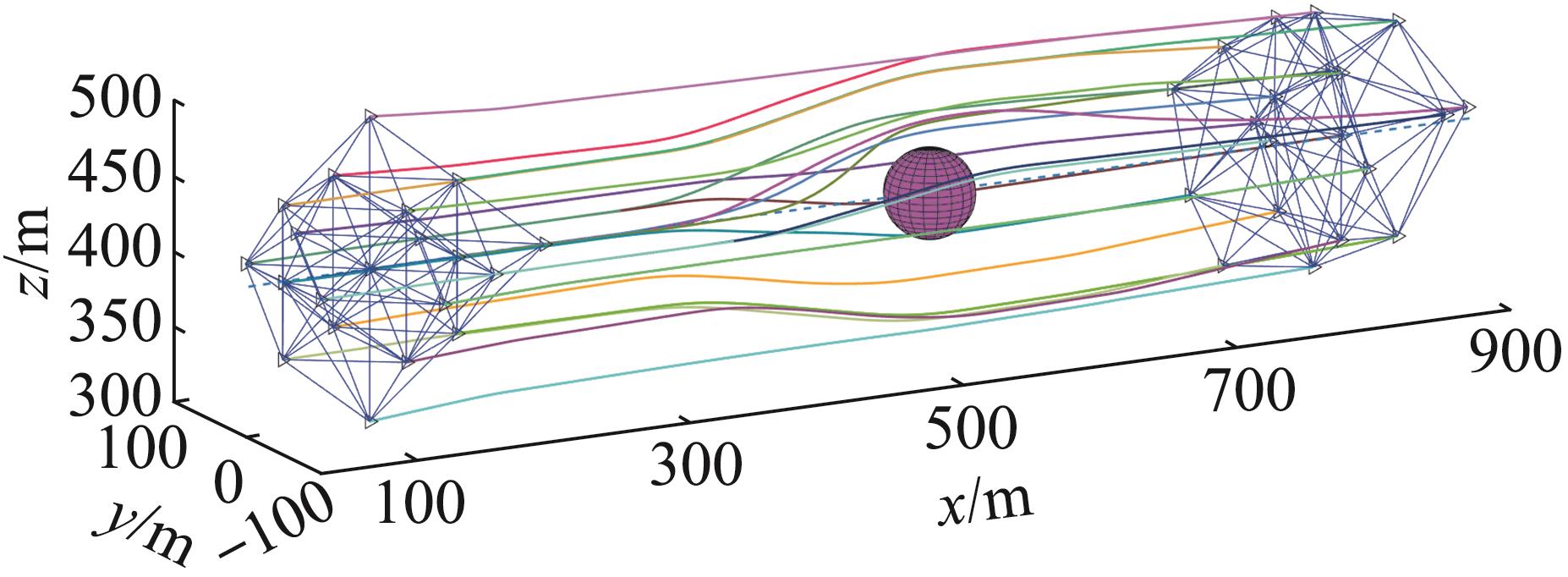
Fig. 9
Scene Ⅰ main view of VFAOAR
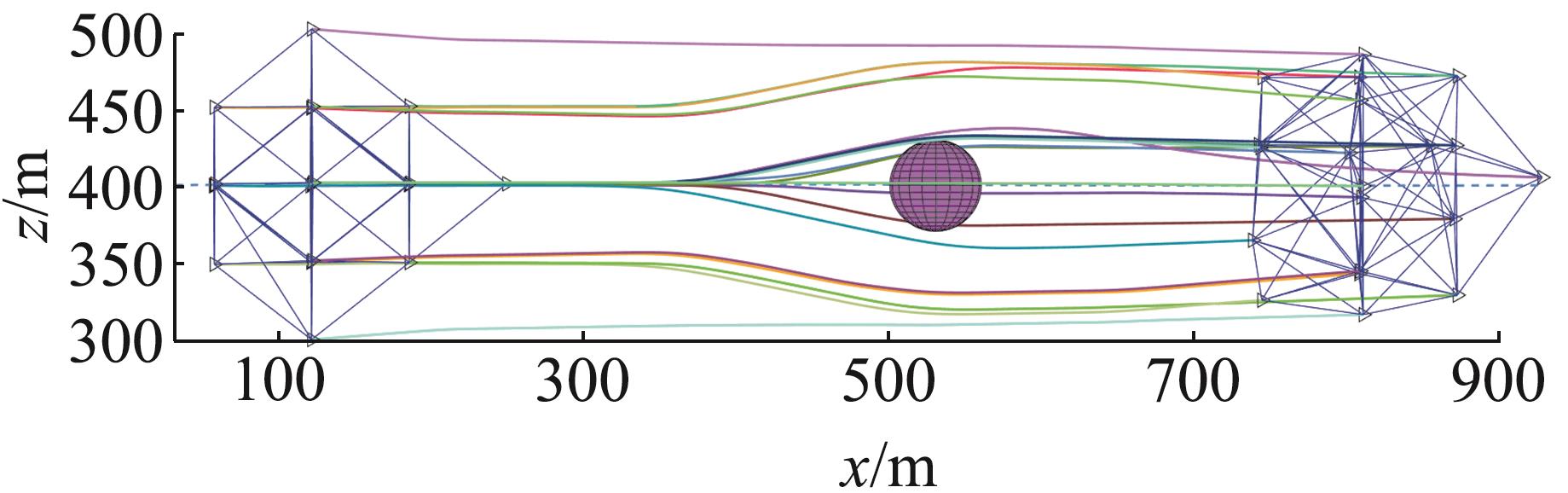
Fig. 10
Scene Ⅰ top view of VFAOAR
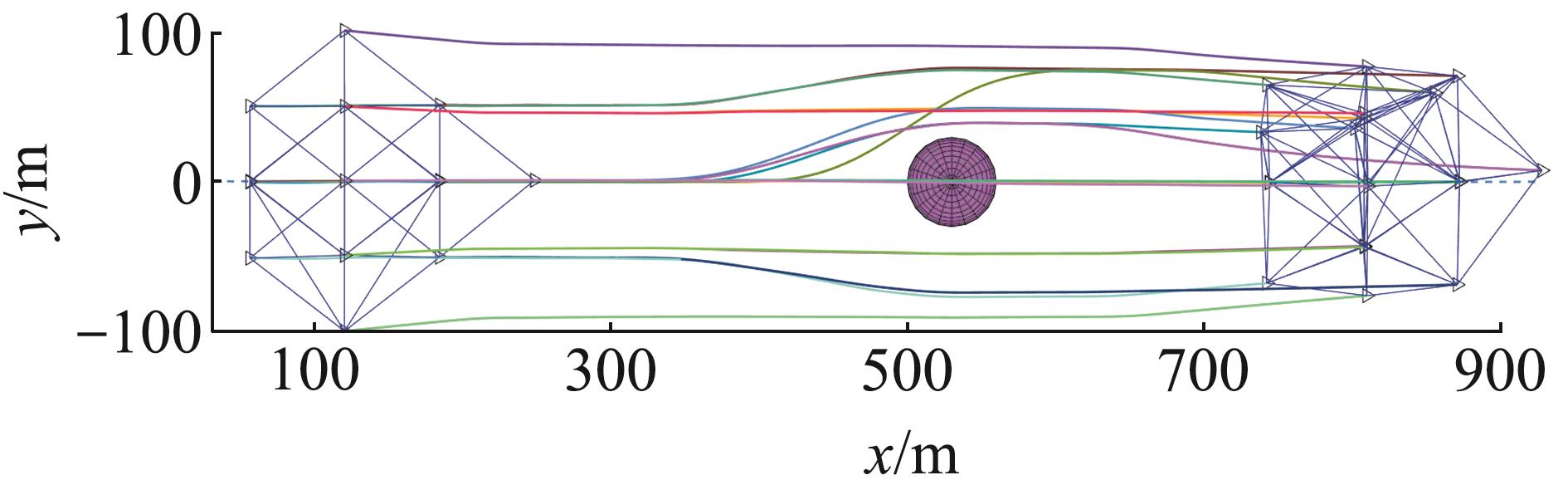
Fig. 11
Scene Ⅰ simulation diagram of VFVG
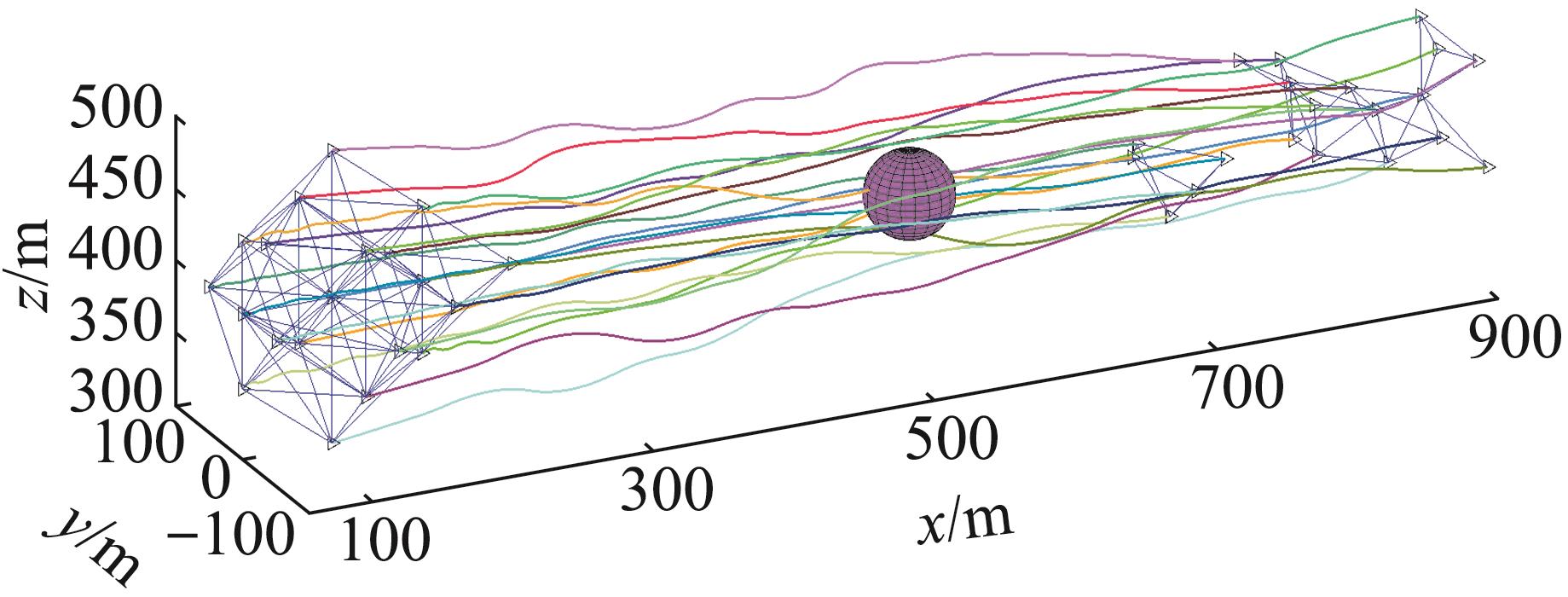
Fig. 12
Scene Ⅰ main view of VFVG
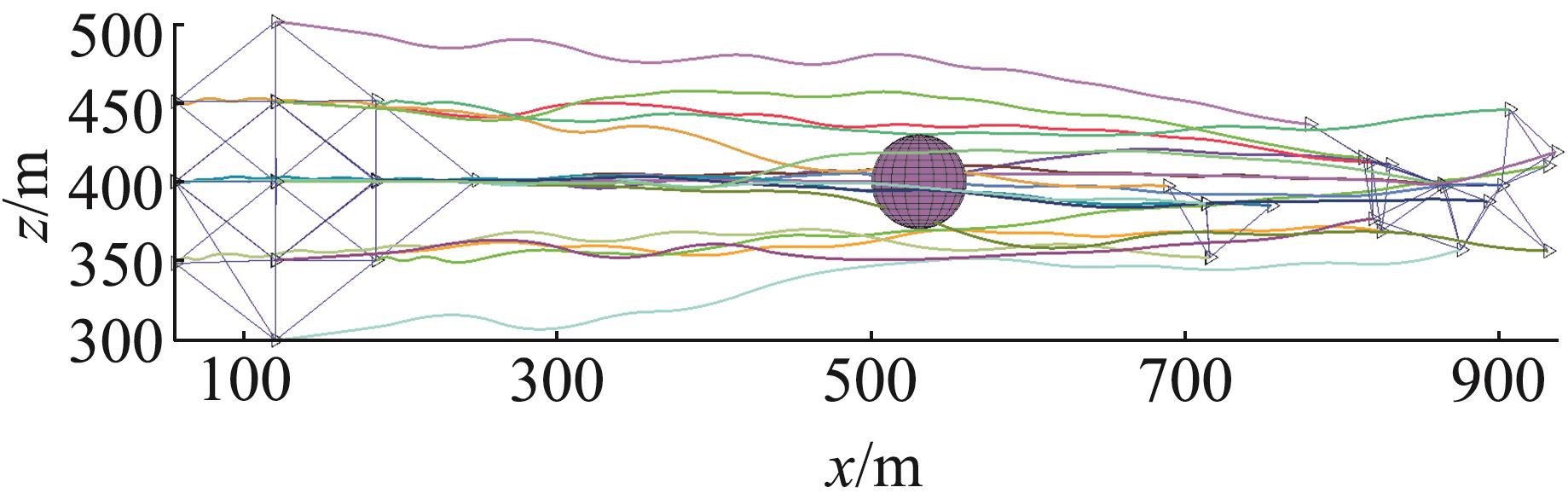
Fig. 13
Scene Ⅰ top view of VFVG
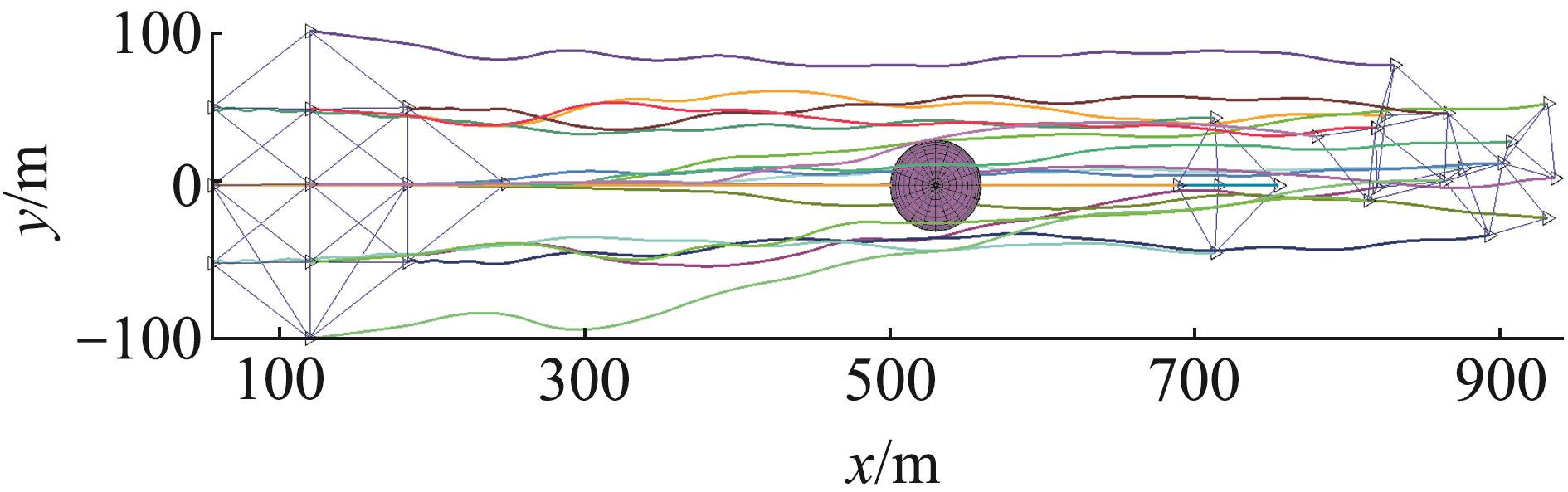
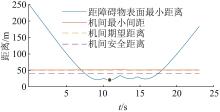
Fig. 14
Scene Ⅰ distance variation of VFAOAR
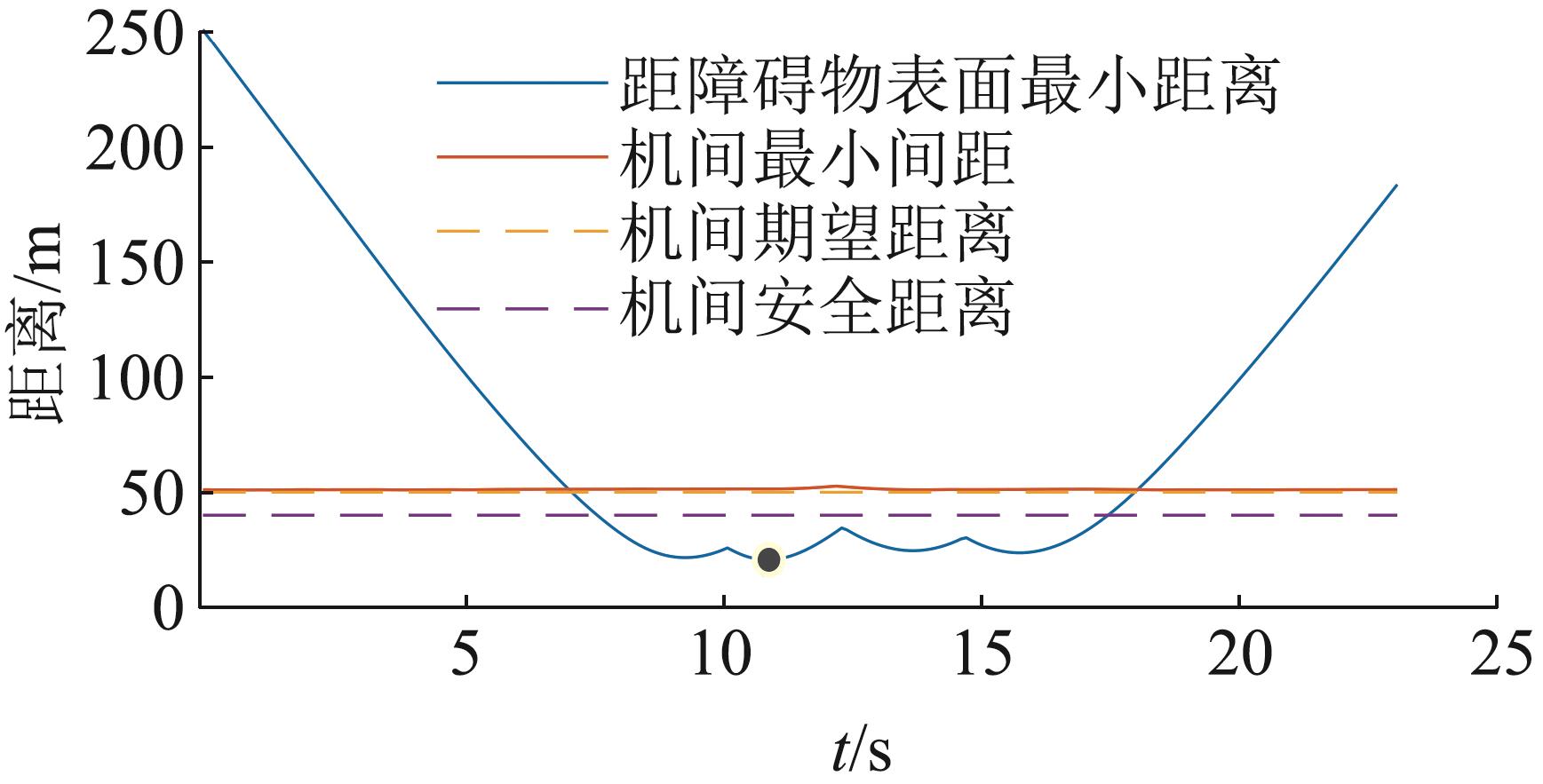
Fig. 15
Scene Ⅰ distance variation of VFVG
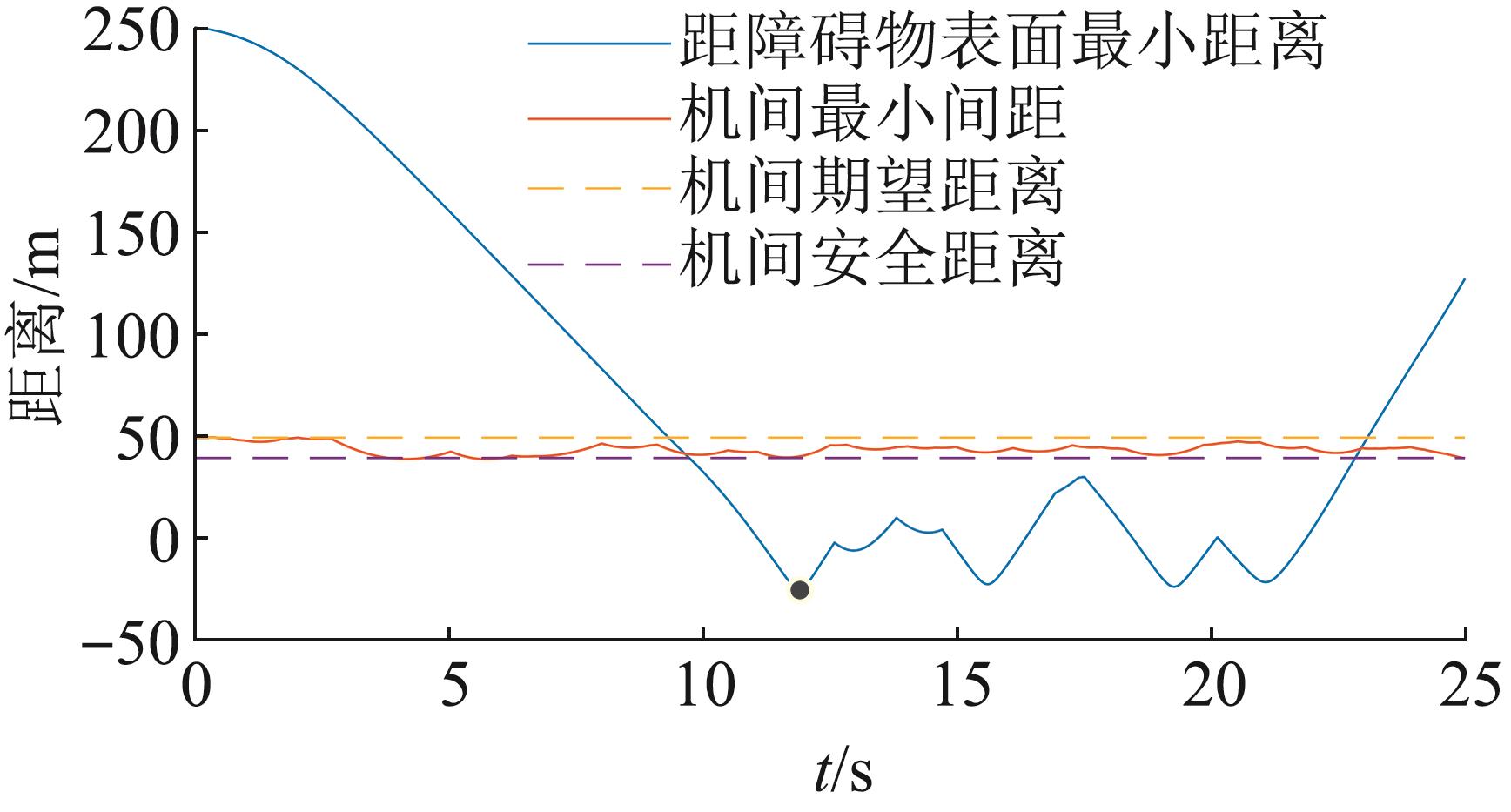
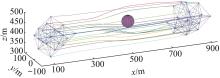
Fig. 16
Scene Ⅱ simulation diagram of VFAOAR
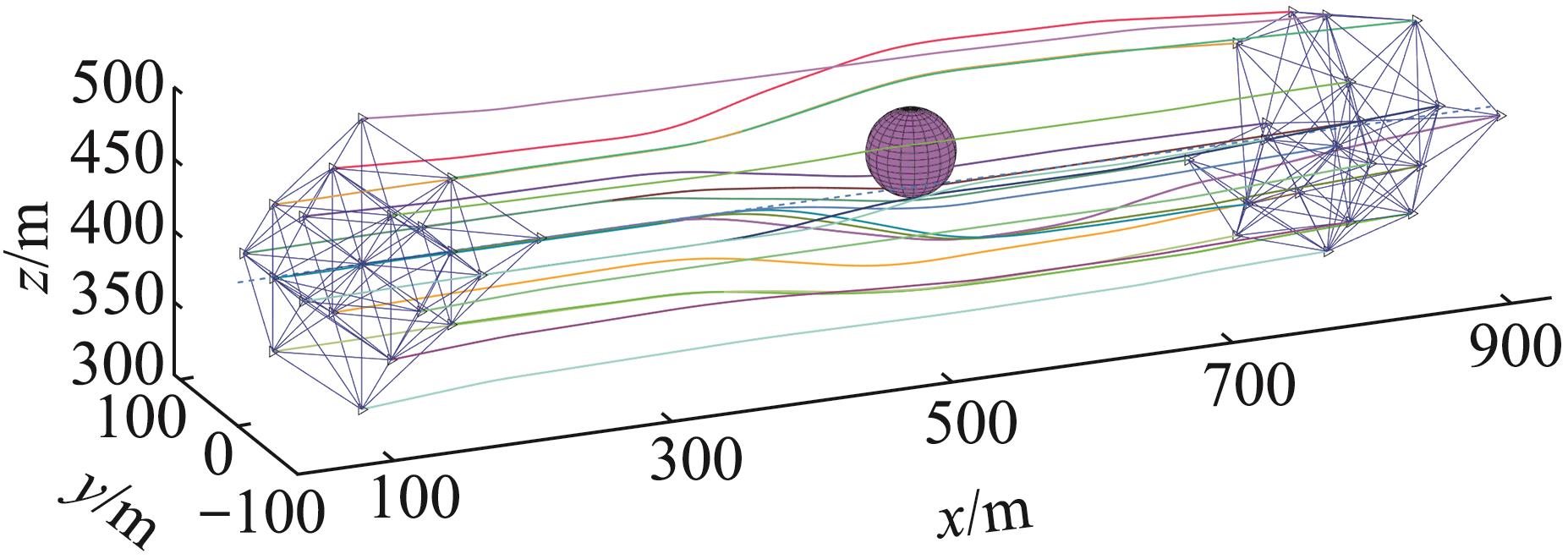
Fig. 17
Scene Ⅱ main view of VFAOAR
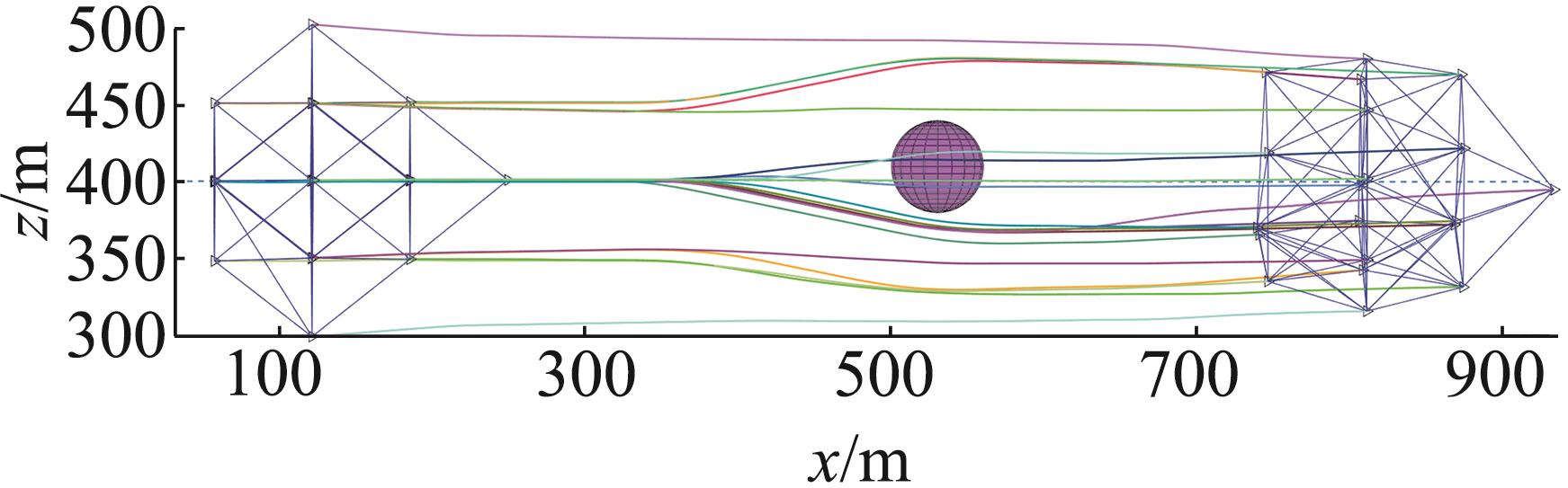
Fig. 18
Scene Ⅱ top view of VFAOAR
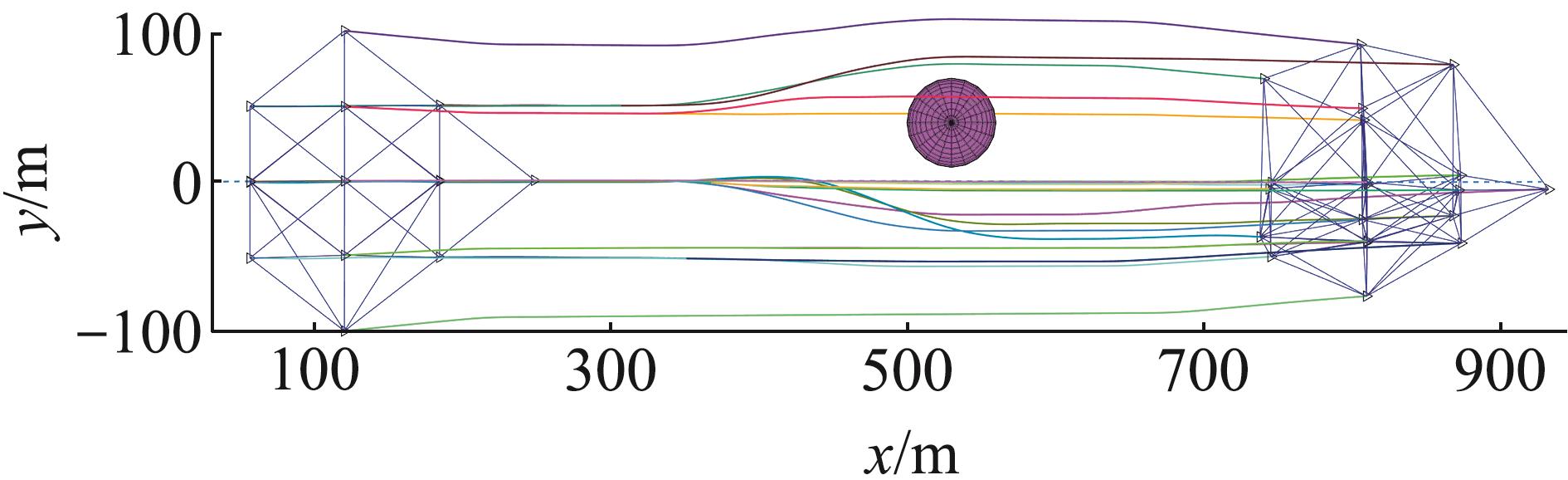
Fig. 19
Scene Ⅱ simulation diagram of VFVG
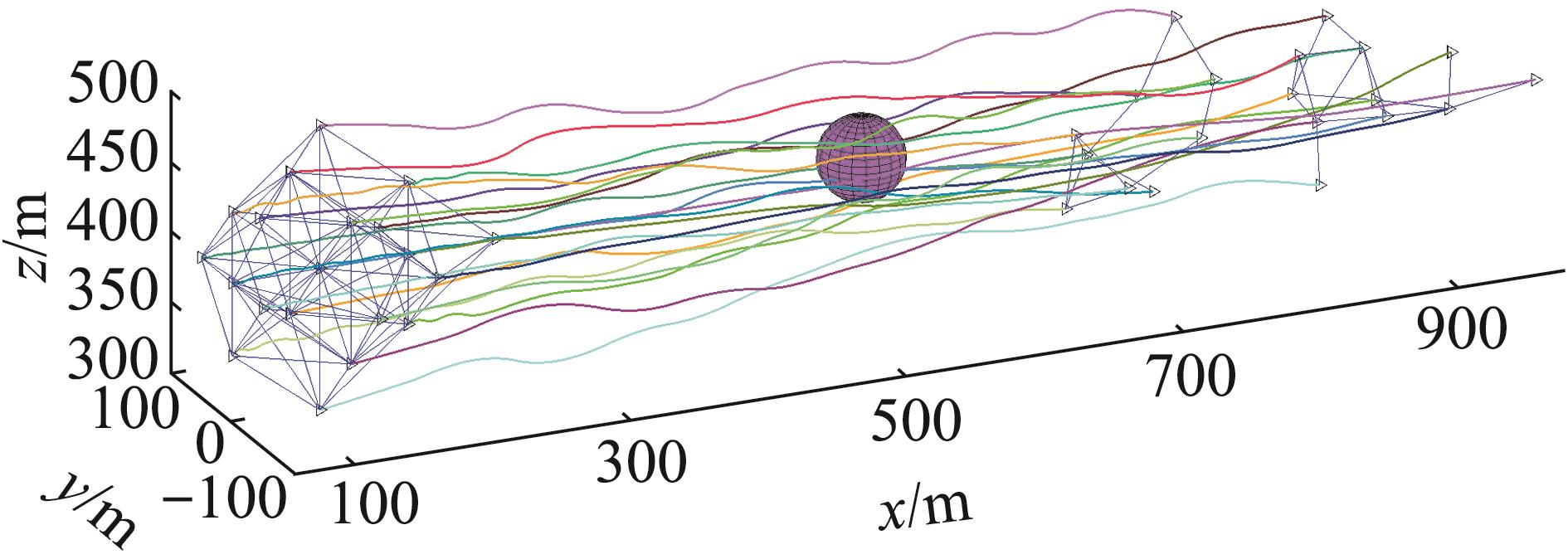
Fig. 20
Scene Ⅱ main view of VFVG
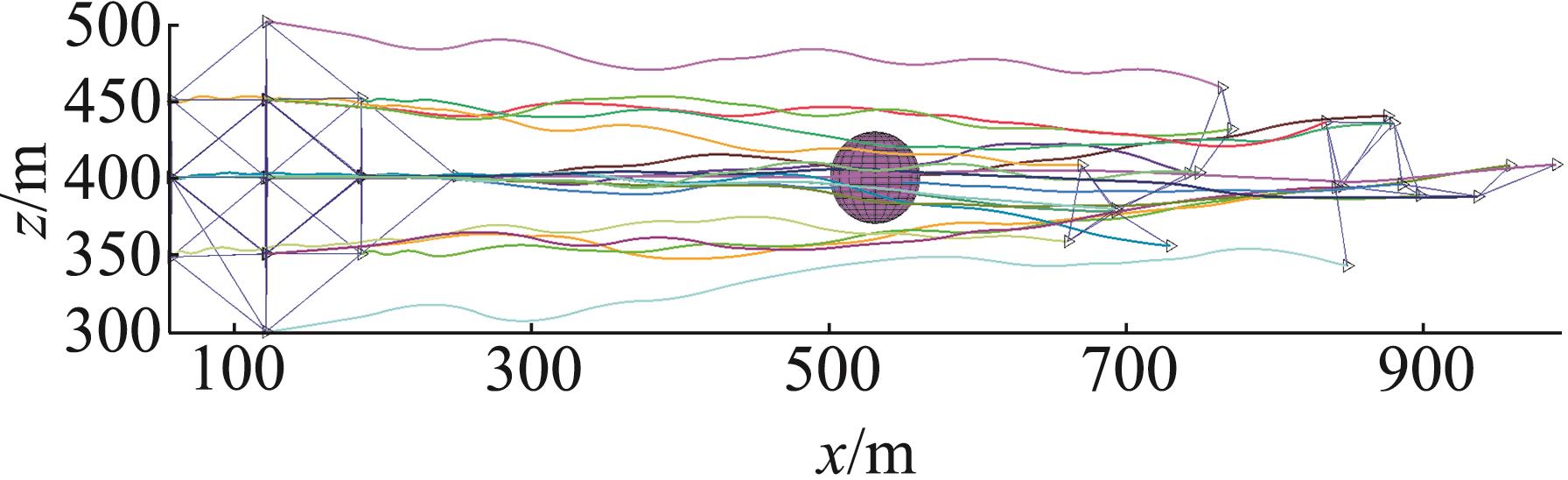

Fig. 21
Scene Ⅱ top view of VFVG

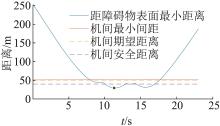
Fig. 22
Scene Ⅱ distance variation of VFAOAR
Fig. 23
Scene Ⅱ distance variation of VFVG
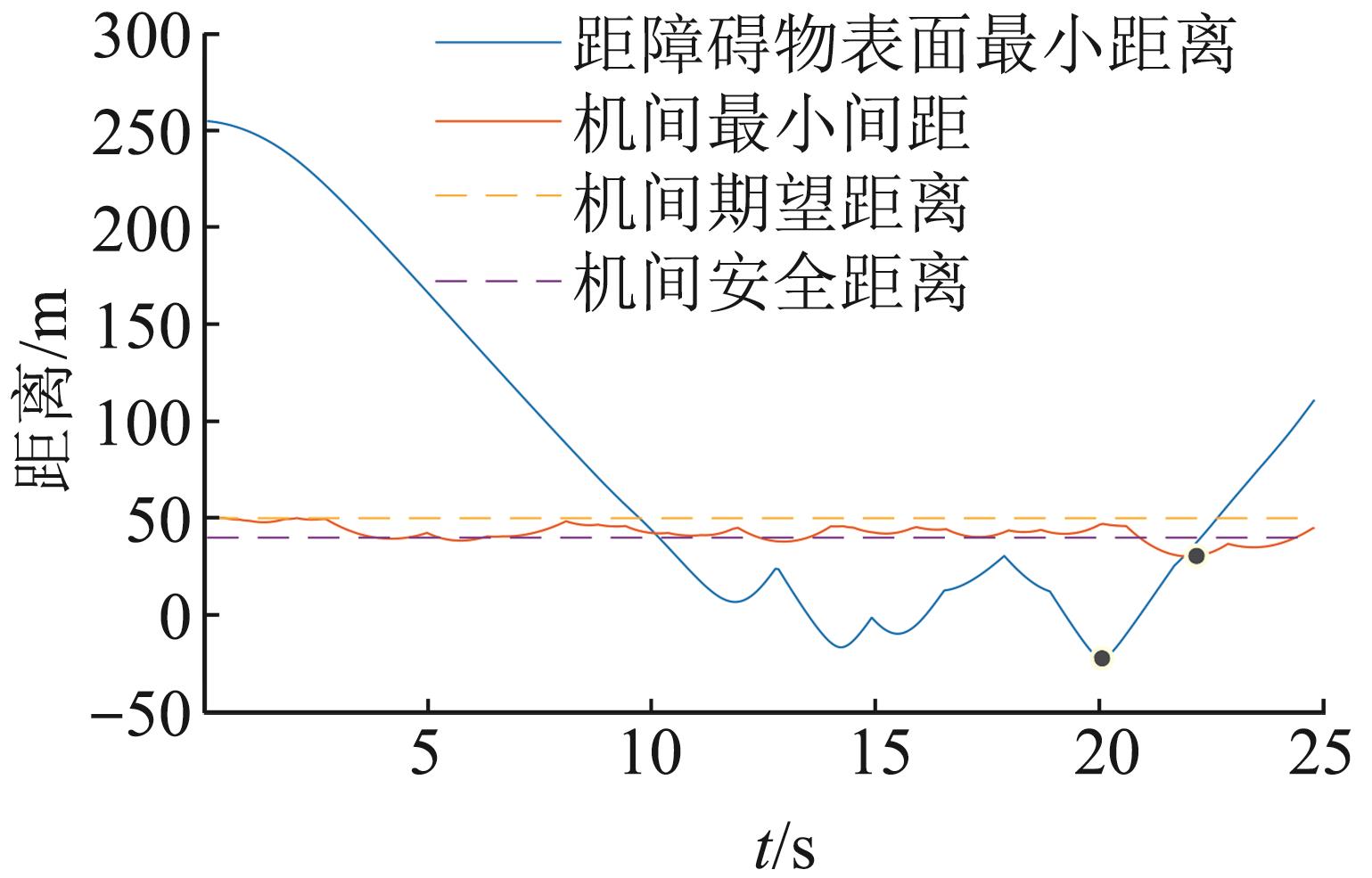
Table 3
UAV initial position in complex scene
| 无人机序列 | 位置 | 航迹方位角/rad | 航迹倾斜角/rad |
|---|---|---|---|
| UAV1 | [245, 196, 411] | 0.26 | 0.01 |
| UAV2 | [175, 218, 410] | 0.50 | 0.03 |
| UAV3 | [176, 115, 412] | 0.32 | 0.07 |
| UAV4 | [176, 167, 462] | 0.45 | 0.07 |
| UAV5 | [176, 168, 358] | 0.45 | 0.00 |
| UAV6 | [176, 167, 411] | 0.35 | 0.06 |
| UAV7 | [107, 217, 407] | 0.60 | 0.04 |
| UAV8 | [102, 21, 407] | 0.78 | 0.04 |
| UAV9 | [105, 118, 505] | 0.66 | -0.03 |
| UAV10 | [105, 118, 309] | 0.66 | 0.09 |
| UAV11 | [106, 167, 455] | 0.63 | 0.00 |
| UAV12 | [106, 167, 358] | 0.63 | 0.07 |
| UAV13 | [104, 69, 455] | 0.69 | 0.01 |
| UAV14 | [104, 69, 359] | 0.68 | 0.09 |
| UAV15 | [105, 118, 407] | 0.66 | 0.04 |
| UAV16 | [36, 42, 404] | 0.71 | 0.09 |
| UAV17 | [36, 94, 403] | 0.82 | 0.05 |
| UAV18 | [38, -8, 404] | 0.68 | 0.09 |
| UAV19 | [34, 45, 455] | 0.86 | 0.09 |
| UAV20 | [34, 45, 351] | 0.86 | 0.03 |
Fig. 24
Simulation of complex scene
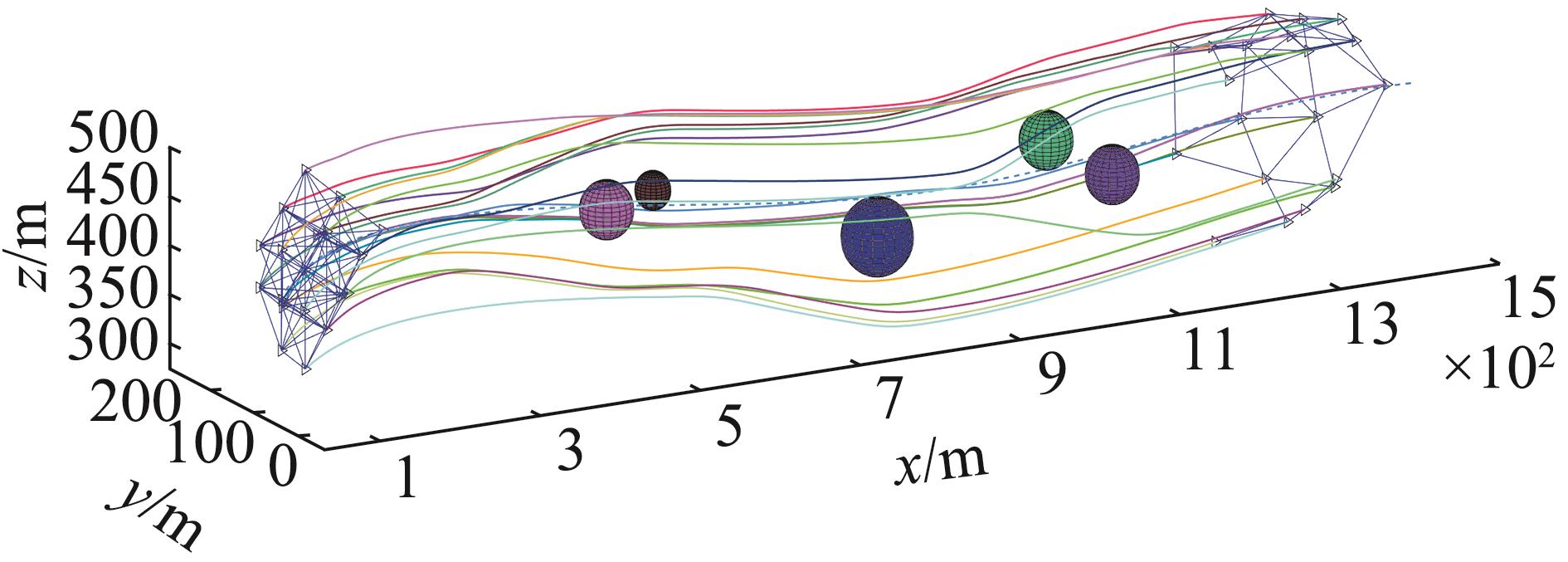

Fig. 25
Main view of complex scene
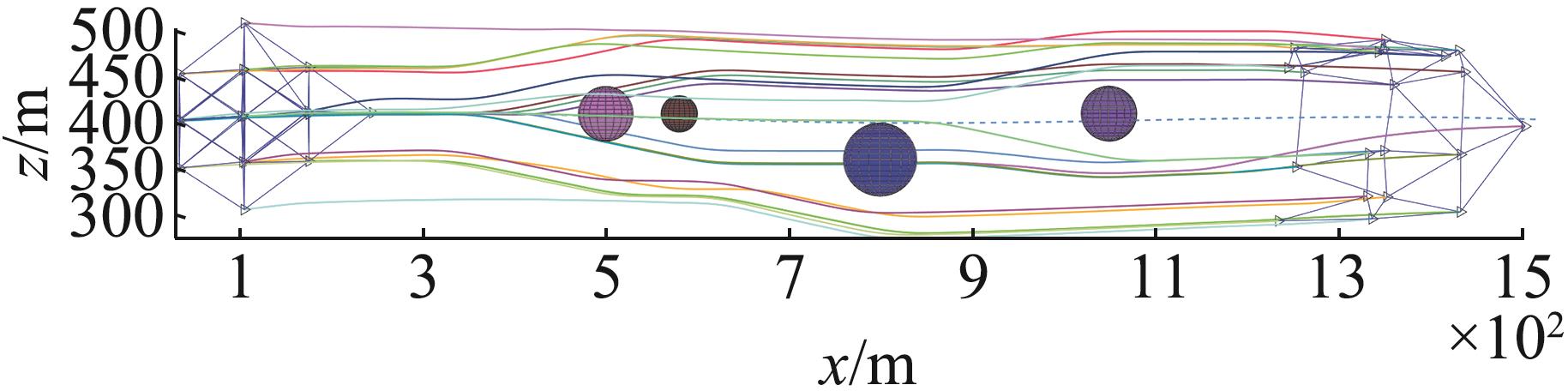

Fig. 26
Top view of complex scene
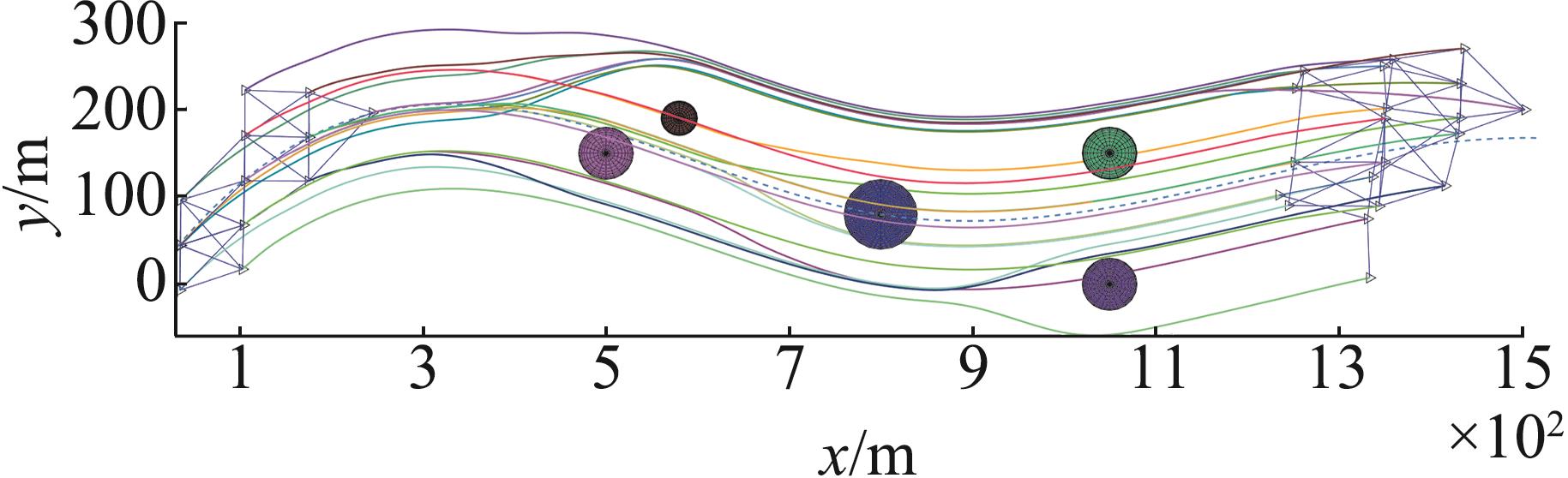
Fig. 27
Distance variation of complex scene
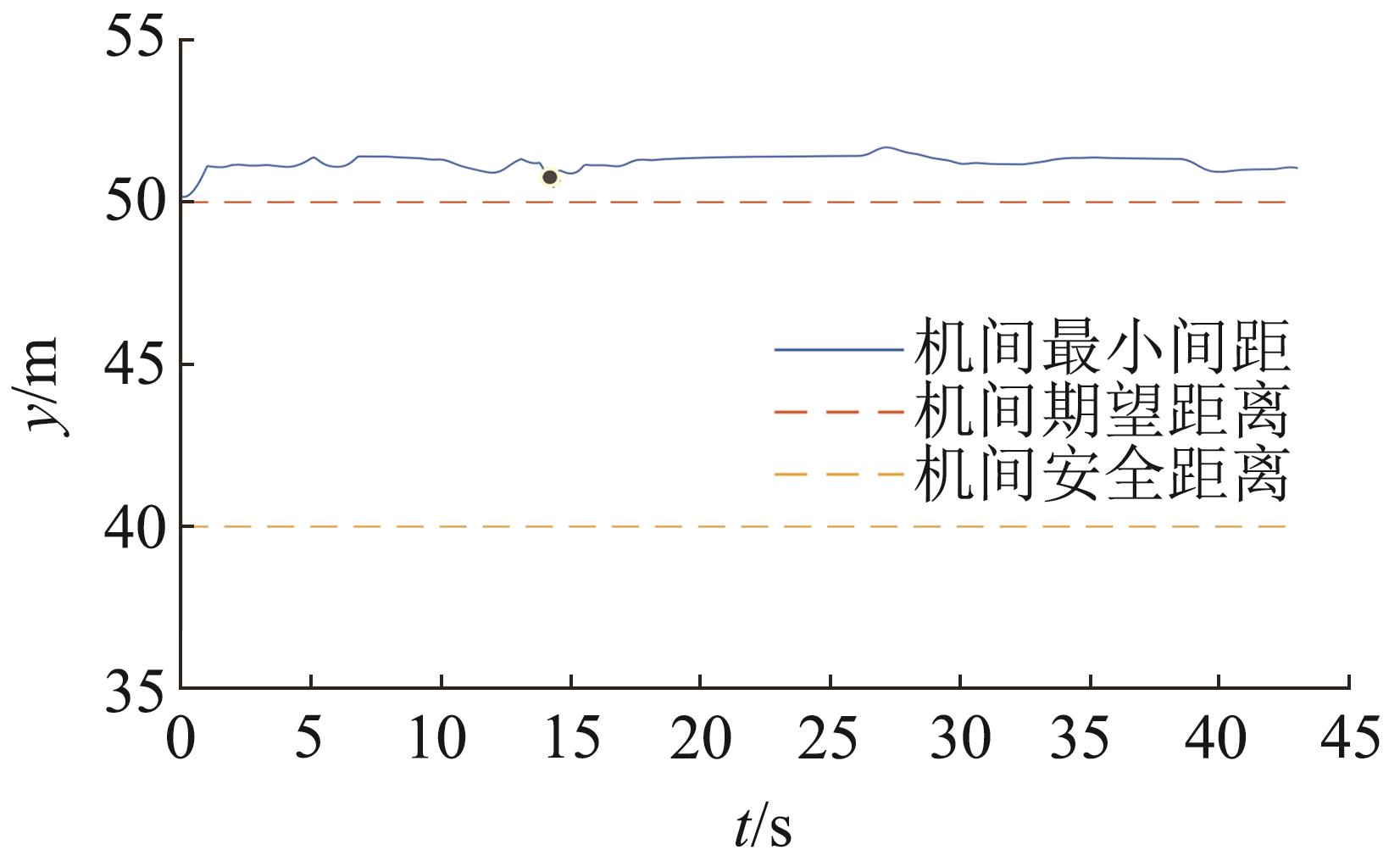
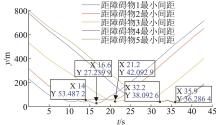
Fig. 28
Variation of distance to surface of obstacle
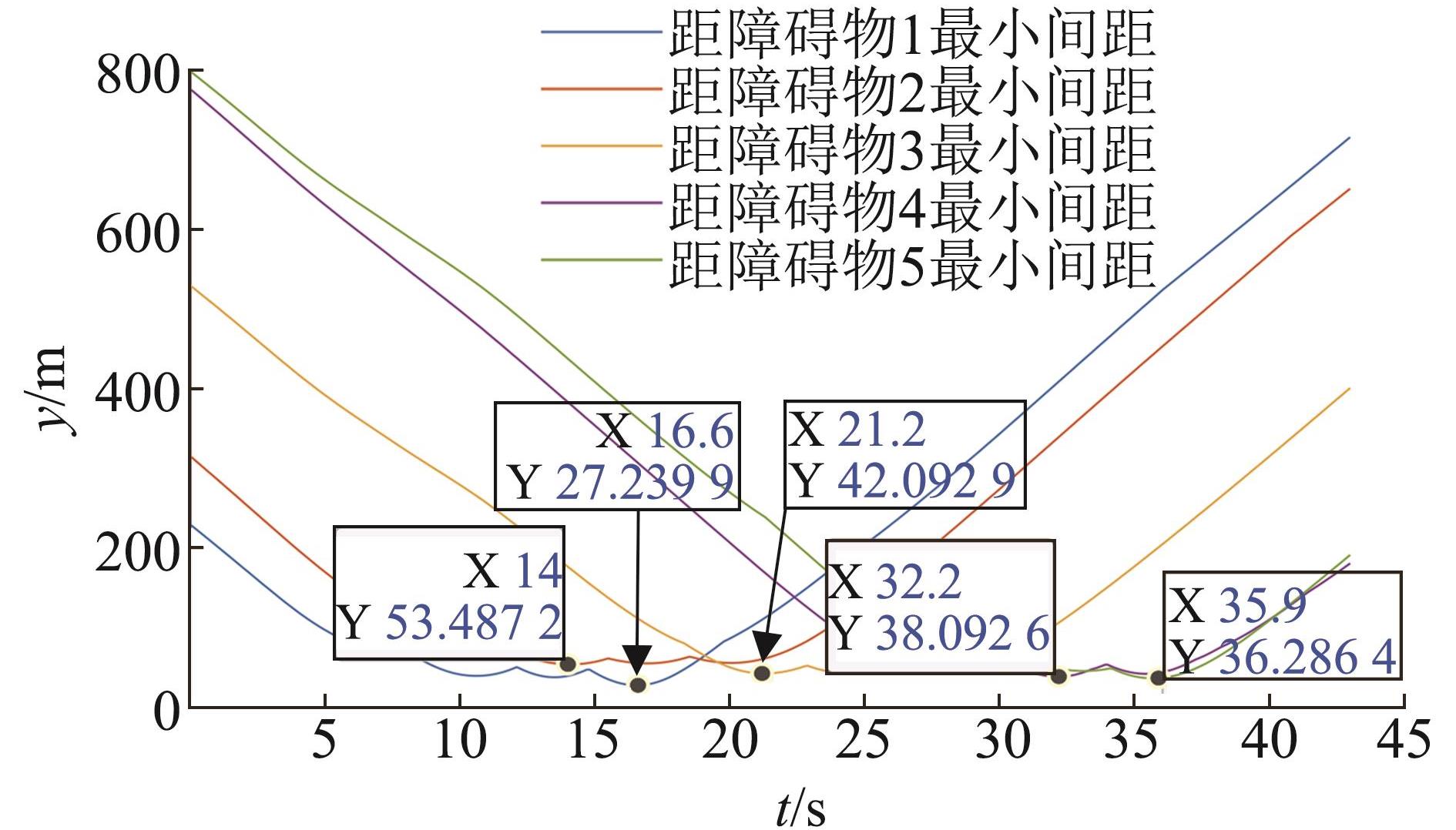
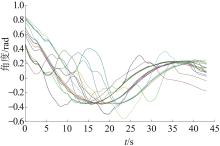
Fig. 29
UAV track azimuth angle variation
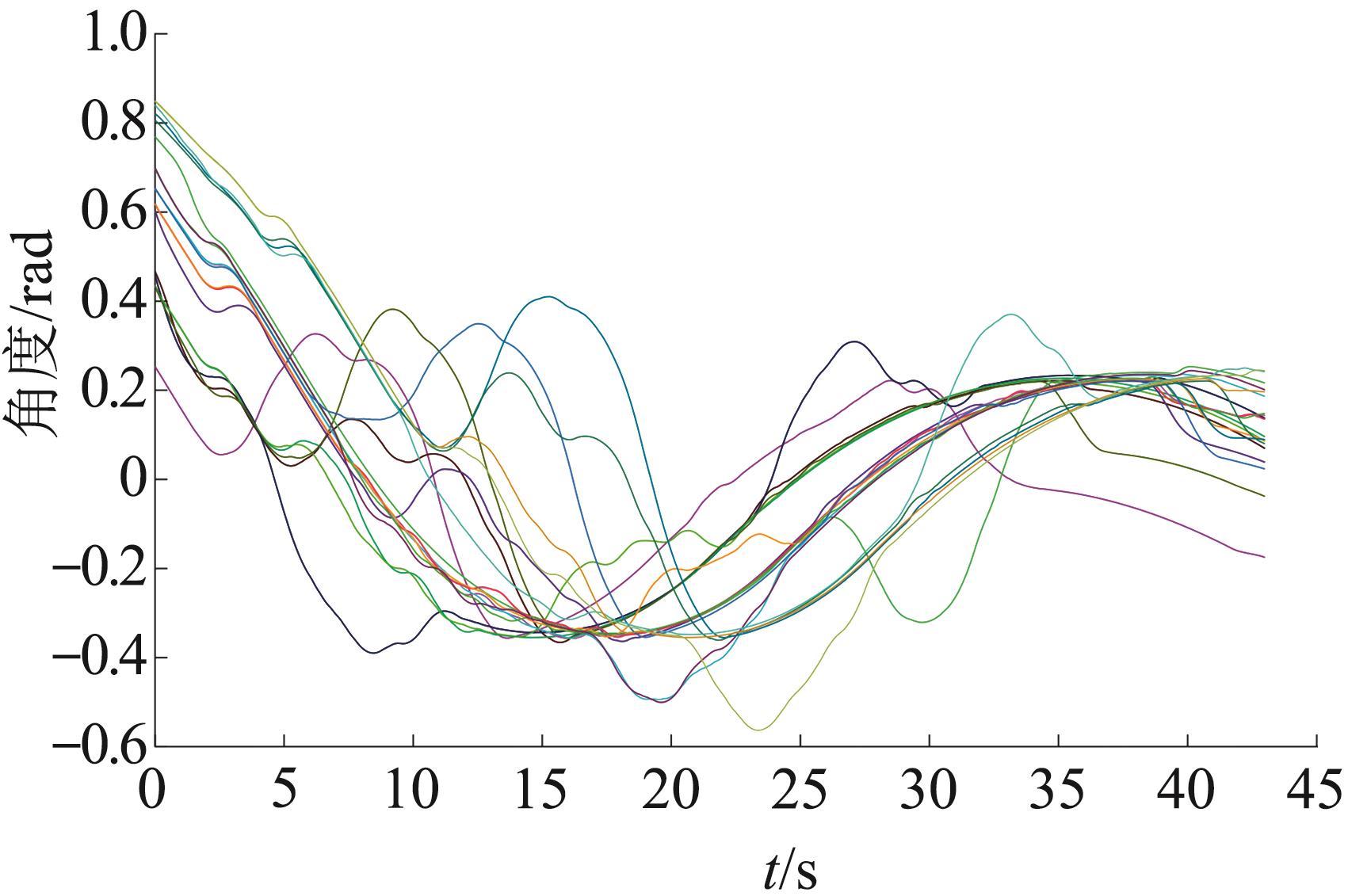
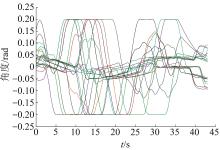
Fig. 30
UAV track inclination angle variation
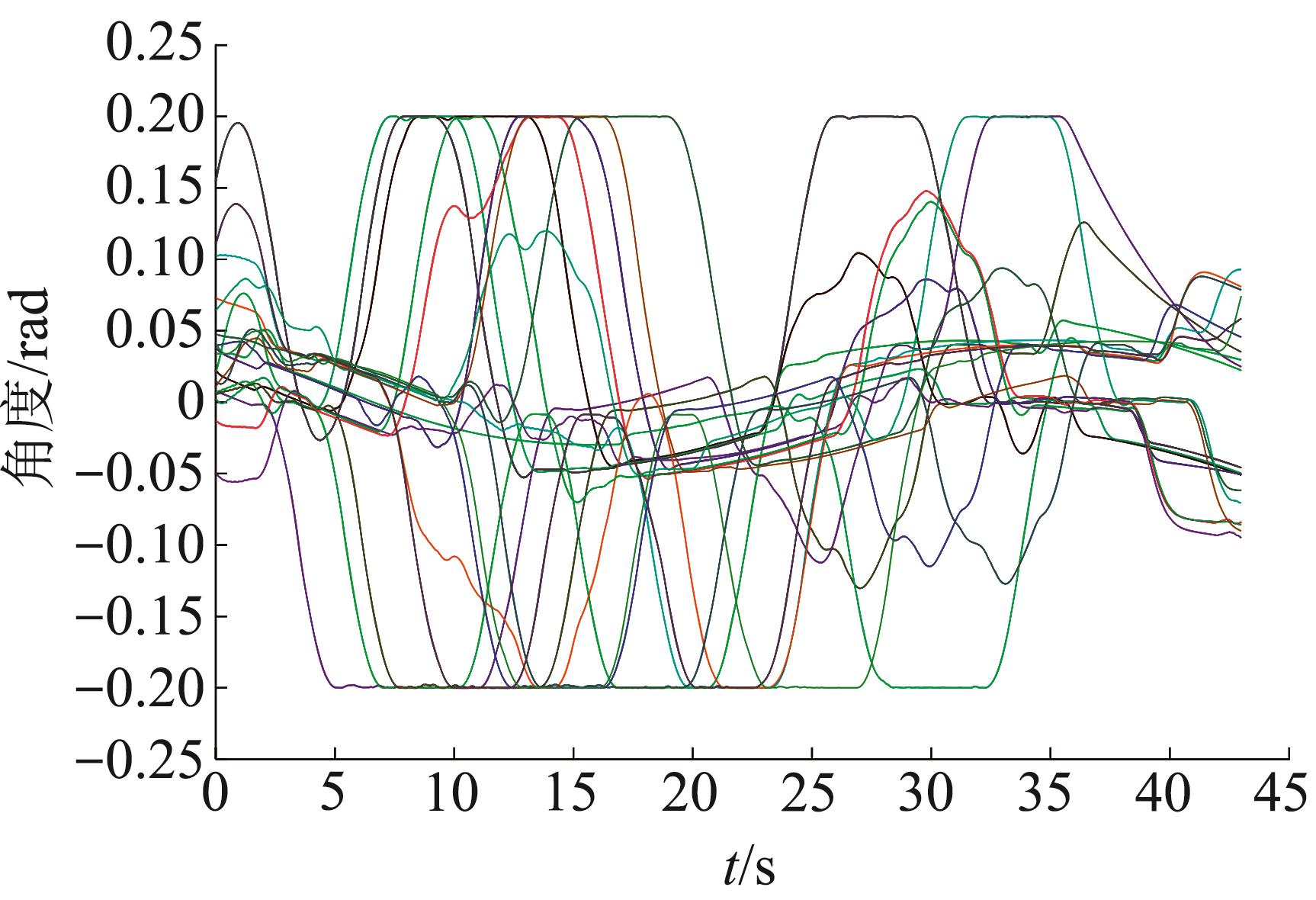
Fig. 31
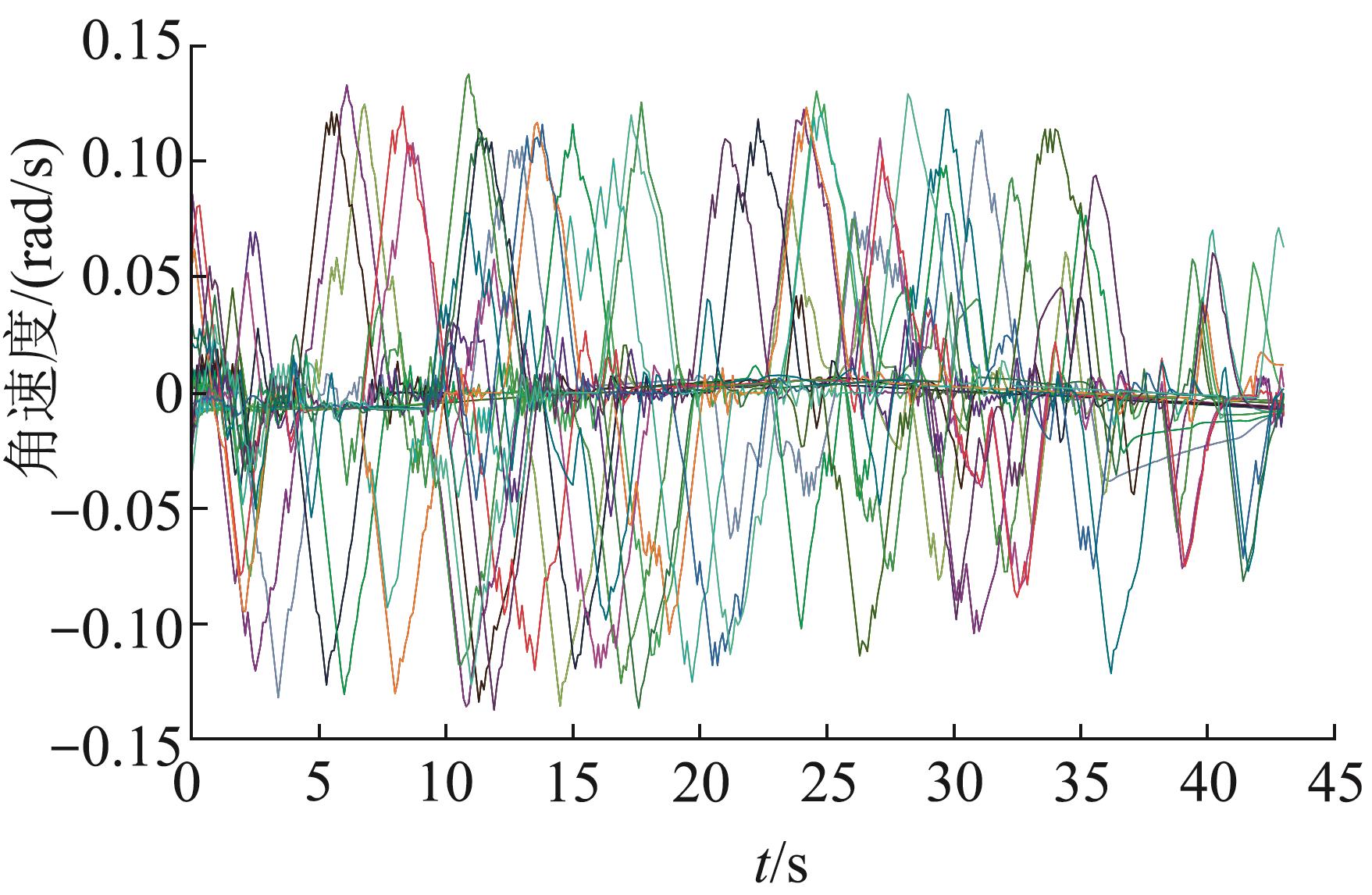
UAV track azimuth angle velocity variation
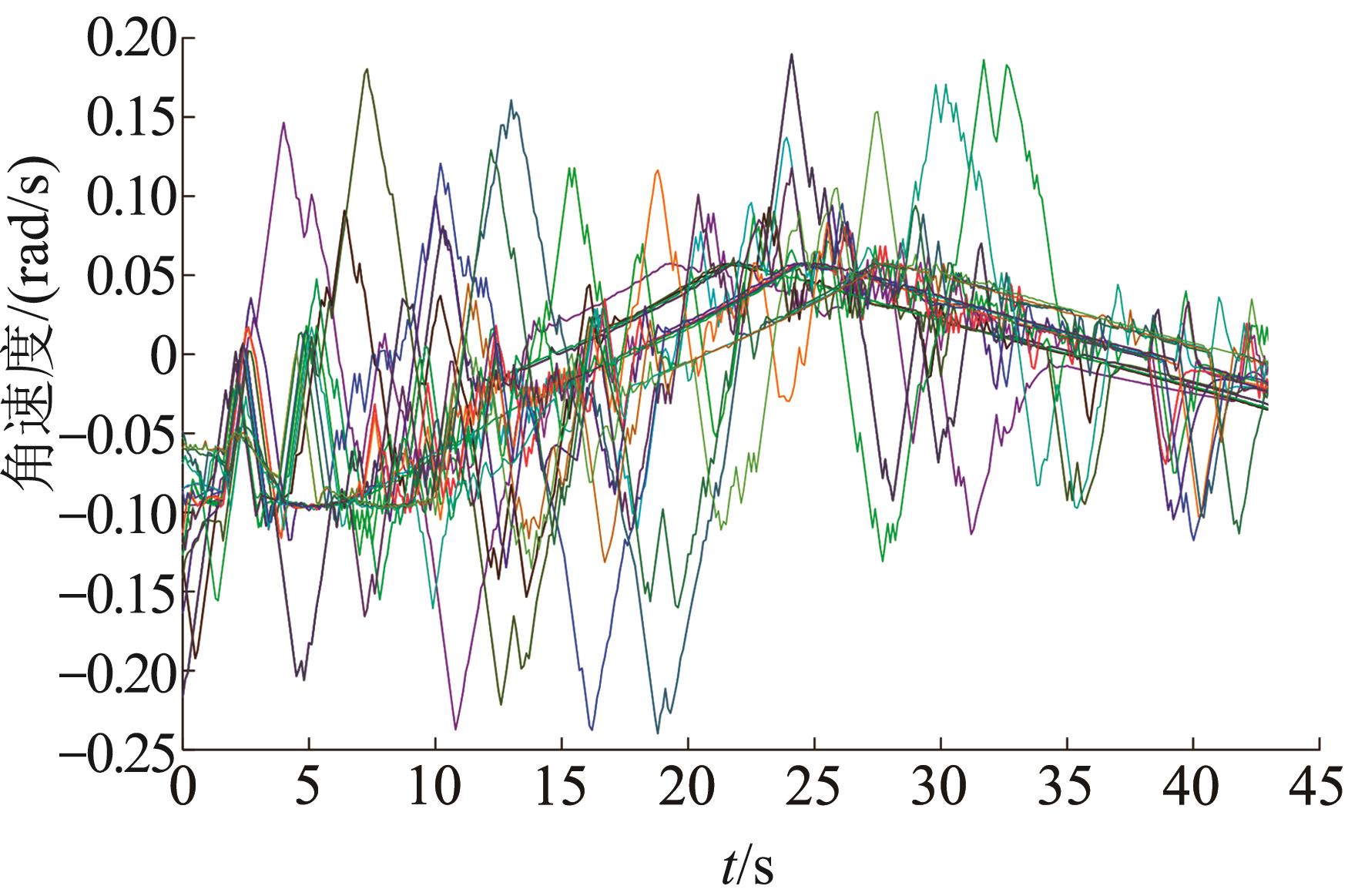
Fig. 32
UAV track inclination angle velocity variation
| 1 | 陆浩然, 王永峰, 鞠兴龙. 固定翼无人机编队的启发分布式模型预测控制[J]. 导航定位与授时, 2021, 8(6): 43-51. |
| Lu Haoran, Wang Yongfeng, Ju Xinglong. Fixed Wing UAVs Formation Control Based on Heuristic Distributed Model Predictive Control Method[J]. Navigation Positioning and Timing, 2021, 8(6): 43-51. | |
| 2 | Reynolds C W. Flocks, Herds and Schools: A Distributed Behavioral Model[C]//Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques. New York: Association for Computing Machinery, 1987: 25-34. |
| 3 | Olfati-Saber R. Flocking for Multi-agent Dynamic Systems: Algorithms and Theory[J]. IEEE Transactions on Automatic Control, 2006, 51(3): 401-420. |
| 4 | 伍友利, 叶圣涛, 方洋旺, 等. 固定翼无人机群的集群和避障控制[J]. 国防科技大学学报, 2019, 41(5): 103-110. |
| Wu Youli, Ye Shengtao, Fang Yangwang, et al. Flocking and Obstacles Avoidance for Fixed-wing Unmanned Aerial Vehicle Swarm[J]. Journal of National University of Defense Technology, 2019, 41(5): 103-110. | |
| 5 | Wang Xun, Wang Xiangke, Zhang Daibing, et al. A Liquid Sphere-inspired Physicomimetics Approach for Multiagent Formation Control[J]. International Journal of Robust and Nonlinear Control, 2018, 28(15): 4565-4583. |
| 6 | 桂雪琪, 李春涛. 基于视野和速度引导的无人机集群避障算法[J]. 系统仿真学报, 2024, 36(3): 545-554. |
| Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance[J]. Journal of System Simulation, 2024, 36(3): 545-554. | |
| 7 | 陈浩. 复杂条件下固定翼无人机集群编队控制研究[D]. 长沙: 国防科技大学, 2020. |
| Chen Hao. Research on Formation Control of Fixed-wing UAV Swarm in Complex Environments[D]. Changsha: National University of Defense Technology, 2020. | |
| 8 | Richards A, How J P. Robust Distributed Model Predictive Control[J]. International Journal of Control, 2007, 80(9): 1517-1531. |
| 9 | 苏延旭. 约束系统分布式模型预测控制与优化方法研究[D]. 南京: 东南大学, 2021. |
| Su Yanxu. Distributed Model Predictive Control and Optimization for Constrained Systems[D]. Nanjing: Southeast University, 2021. | |
| 10 | Müller Matthias A, Reble Marcus, Allgöwer Frank. Cooperative Control of Dynamically Decoupled Systems Via Distributed Model Predictive Control[J]. International Journal of Robust and Nonlinear Control, 2012, 22(12): 1376-1397. |
| 11 | 秦明星, 王忠, 李海龙, 等. 基于分布式模型预测的无人机编队避障控制[J]. 北京航空航天大学学报, 2024, 50(6): 1969-1981. |
| Qin Mingxing, Wang Zhong, Li Hailong, et al. Obstacle Avoidance Control of UAV Formation Based on Distributed Model Prediction[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(6): 1969-1981. | |
| 12 | Zhang Boyang, Sun Xiuxia, Liu Shuguang, et al. Adaptive Differential Evolution-based Distributed Model Predictive Control for Multi-UAV Formation Flight[J]. International Journal of Aeronautical and Space Sciences, 2020, 21(2): 538-548. |
| 13 | Dunbar W B, Murray R M. Distributed Receding Horizon Control for Multi-vehicle Formation Stabilization[J]. Automatica, 2006, 42(4): 549-558. |
| 14 | 黄朝阳. 基于分布式预测控制的多机器人协同避障[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| Huang Chaoyang. Multi-robot Obstacle Avoidance Based on Distributed Model Predictive Control[D]. Harbin: Harbin Institute of Technology, 2022. | |
| 15 | Müller M A, Allgöwer F. Distributed MPC for Consensus and Synchronization[M]//José M Maestre, Rudy R Negenborn. Distributed Model Predictive Control Made Easy. Dordrecht: Springer Netherlands, 2014: 89-100. |
| [1] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [2] | Wang He, Xu Jianing, Yan Guangyu. Research on Pedestrian Avoidance Strategy for AGV Based on Deep Reinforcement Learning [J]. Journal of System Simulation, 2025, 37(3): 595-606. |
| [3] | Huo Hanlin, Zou Xiangjun, Chen Yan, Zhou Xinzhao, Chen Mingyou, Li Chengen, Pan Yaoqiang, Tang Yunchao. Visual Robot Obstacle Avoidance Planning and Simulation Using Mapped Point Clouds [J]. Journal of System Simulation, 2024, 36(9): 2149-2158. |
| [4] | Ji Peng, Zhang Xinyuan, Gao Shuaixuan, Wei Shuorang. Path Planning Based on Improved A* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(9): 2171-2180. |
| [5] | Liu Bin, Lan Ying, Huang Wentao, Fan Qinqin. UAV Dynamic Path Planning Algorithm Combined with Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(8): 1843-1853. |
| [6] | Liu Zesen, Bi Sheng, Guo Chuanhong, Wang Yankui, Dong Min. Deep Learning Based Local Path Planning Method for Moving Robots [J]. Journal of System Simulation, 2024, 36(5): 1199-1210. |
| [7] | Zhang Rui, Zhou Li, Liu Zhengyang. Dynamic Path Planning for Mobile Robot Based on RRT* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(4): 957-968. |
| [8] | Liu Fulin, Li Qingxin. Formation Strategy of Hybrid Obstacle Avoidance Algorithm for Multiple Mobile Robots [J]. Journal of System Simulation, 2024, 36(3): 726-734. |
| [9] | Gui Xueqi, Li Chuntao. UAV Swarm Obstacle Avoidance Algorithm Based on Visual Field and Velocity Guidance [J]. Journal of System Simulation, 2024, 36(3): 545-554. |
| [10] | Ma Zongfang, Zhang Linxuan, Song Lin, Wang Jia. Garage AGV Path Planning and Simulation Based on Improved DWA [J]. Journal of System Simulation, 2024, 36(10): 2265-2276. |
| [11] | Tang Yunchao, Qi Shaojun, Zhu Lixue, Zhuo Xianrong, Zhang Yunqi, Meng Fan. Obstacle Avoidance Motion in Mobile Robotics [J]. Journal of System Simulation, 2024, 36(1): 1-26. |
| [12] | Jianwei Peng, Zhelin Liao, Hanchen Yao, Zhiyu Wan, Liqi Zhu, Houde Dai. A Compliant Robot Control Based on Extended Social-force Model for Human-following and Obstacle Avoidance [J]. Journal of System Simulation, 2023, 35(8): 1776-1787. |
| [13] | Junqiang Lin, Hongjun Wang, Xiangjun Zou, Po Zhang, Chengen Li, Yipeng Zhou, Shujie Yao. Obstacle Avoidance Path Planning and Simulation of Mobile Picking Robot Based on DPPO [J]. Journal of System Simulation, 2023, 35(8): 1692-1704. |
| [14] | Junxiao Xue, Xiangyan Kong, Bowei Dong, Hao Tao, Haiyang Guan, Lei Shi, Mingliang Xu. Obstacle Avoidance and Simulation of Carrier-Based Aircraft on the Deck of Aircraft Carrier [J]. Journal of System Simulation, 2023, 35(3): 592-603. |
| [15] | Kan Li, Yunpeng Li, Jiangbo Zhao. Design and Implementation of UAV Swarm Self-organizing Search Model [J]. Journal of System Simulation, 2022, 34(8): 1820-1833. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
