

Journal of System Simulation ›› 2022, Vol. 34 ›› Issue (7): 1512-1523.doi: 10.16182/j.issn1004731x.joss.21-1060
• Modeling Theory and Methodology • Previous Articles Next Articles
Teng Li1( ), Peipei Ding1(), Jinfang Liu2
), Peipei Ding1(), Jinfang Liu2
Received:2021-10-19
Revised:2022-01-07
Online:2022-07-30
Published:2022-07-20
Contact:
Peipei Ding
E-mail:liteng_ha@126.com;dingpeipei_2020@163.com
CLC Number:
Teng Li, Peipei Ding, Jinfang Liu. Multi-Stage Multi-AGV Path Planning with Walk under Shelves for Robotic Mobile Fulfillment Systems[J]. Journal of System Simulation, 2022, 34(7): 1512-1523.
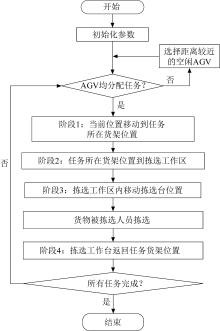
Fig. 1
Flow chart of AGV operation in RMFS system
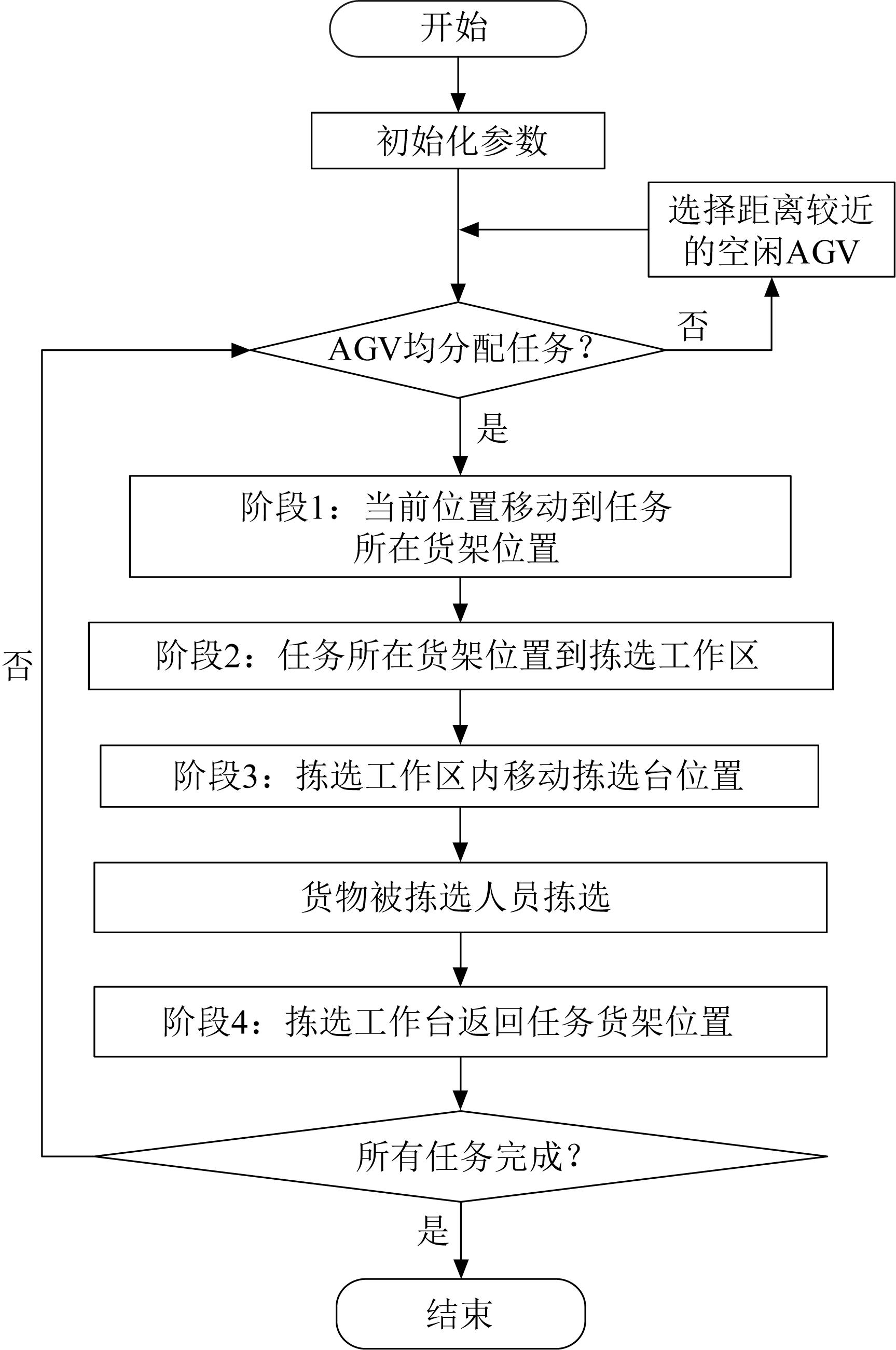

Fig. 2
Composition of completion time for a AGV
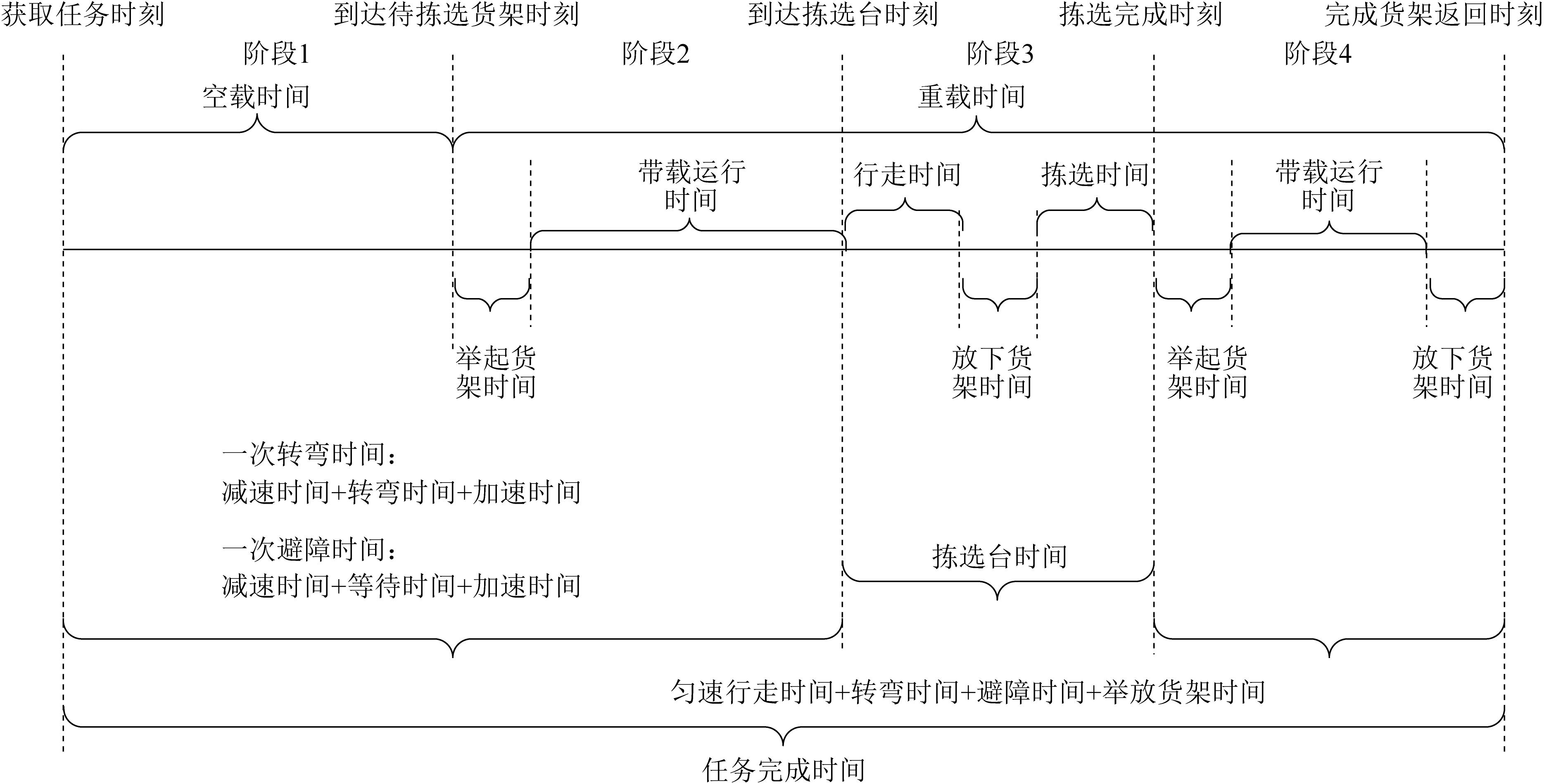
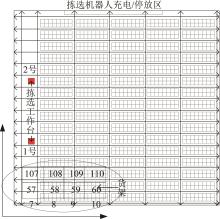
Fig. 3
Warehouse layout and road network
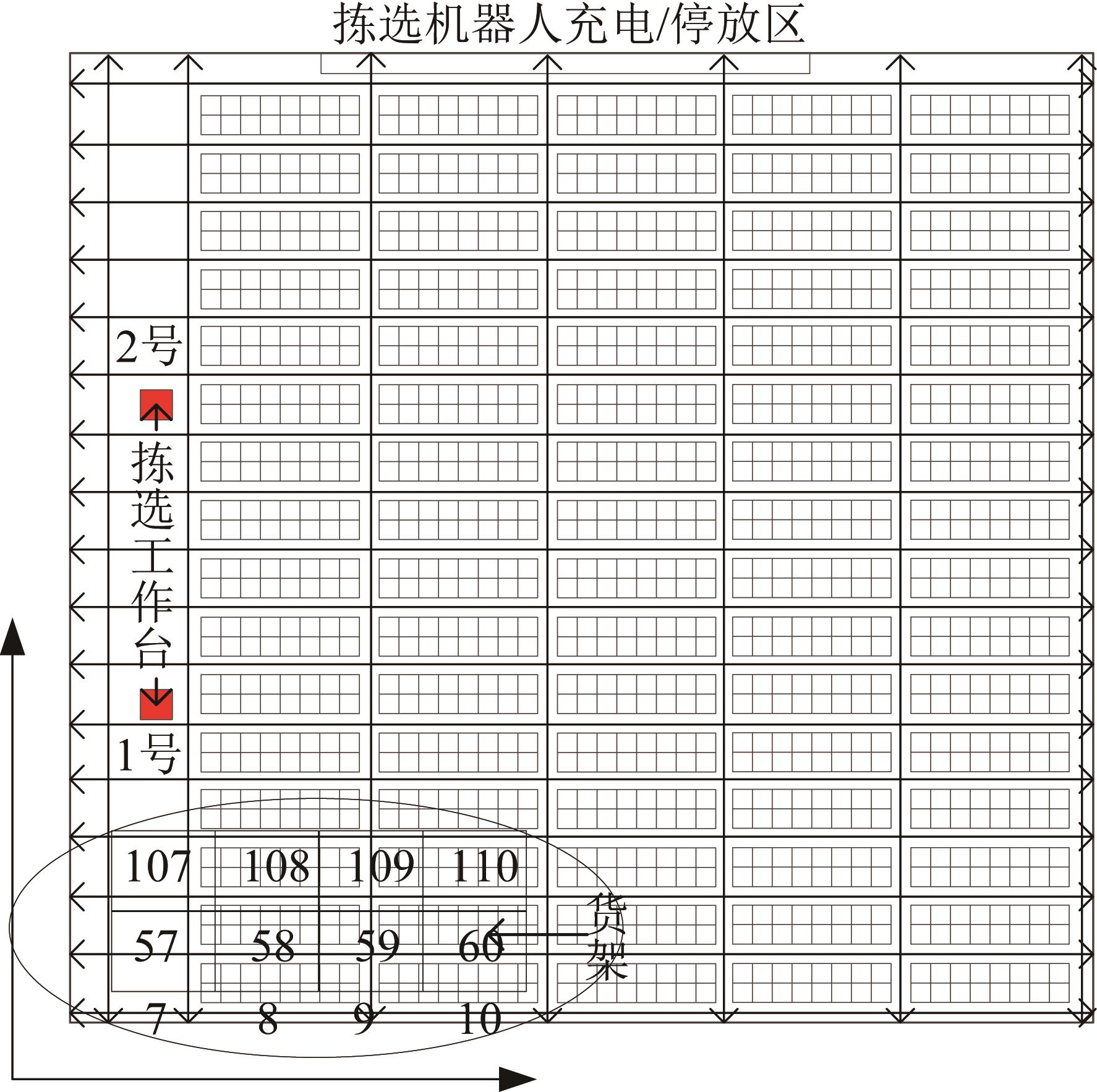
Table 1
Symbol explanation in model
| 符号 | 含义 | 符号 | 含义 |
|---|---|---|---|
| AGV完成任务的时间 | AGV一次加减速行走距离 | ||
| 第 | 第 | ||
| 第 | 第 | ||
| 第 | 值为1时表示前往拣选台阶段,值为2时表示放回货架阶段 | ||
| AGV匀速运行速度 | 系统中第 | ||
| 拣选人员拣货时间 | 编号为 | ||
| AGV举起货架花费的时间 | 第 | ||
| AGV放下货架花费的时间 | 第 | ||
| 第 | 除拣选台外,相邻栅格中心构成的路段集合 | ||
| 第 | 除拣选台和货架外,相邻栅格中心构成的路段集合 | ||
| 第 | 第 | ||
| AGV加减速消耗时间 | 第 | ||
| AGV转弯过程消耗时间 | 决策变量,表示是否经过路段 | ||
| 路段长度 | 编号分别为a,b的栅格中心构成的路段,且栅格a,b相邻 |
Fig. 4
Node search graph of improved A* algorithm
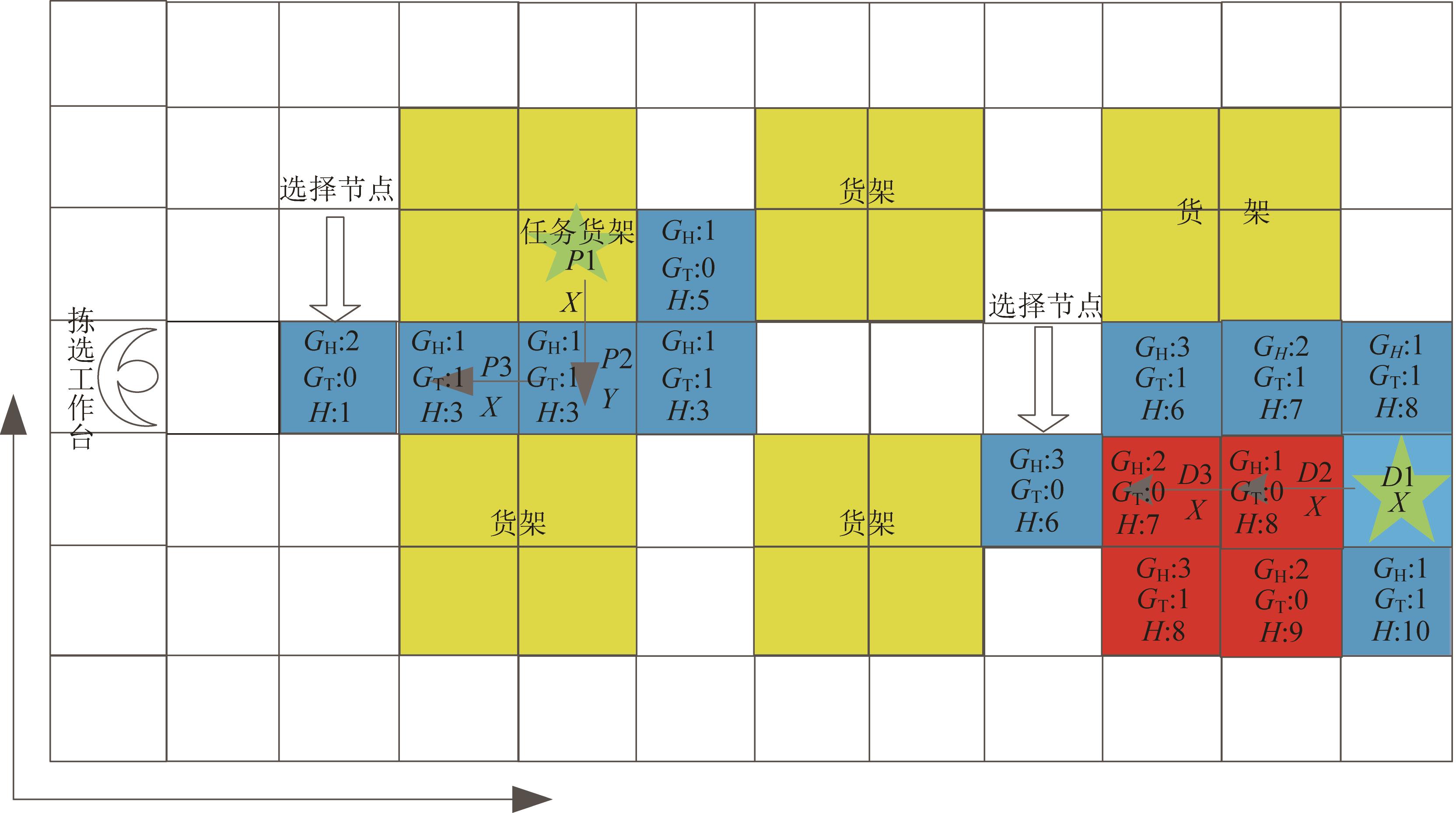
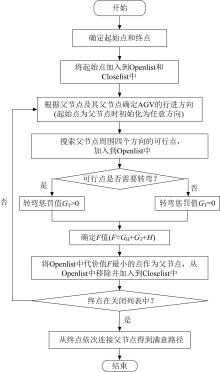
Fig. 5
Steps of improved A* path planning algorithm
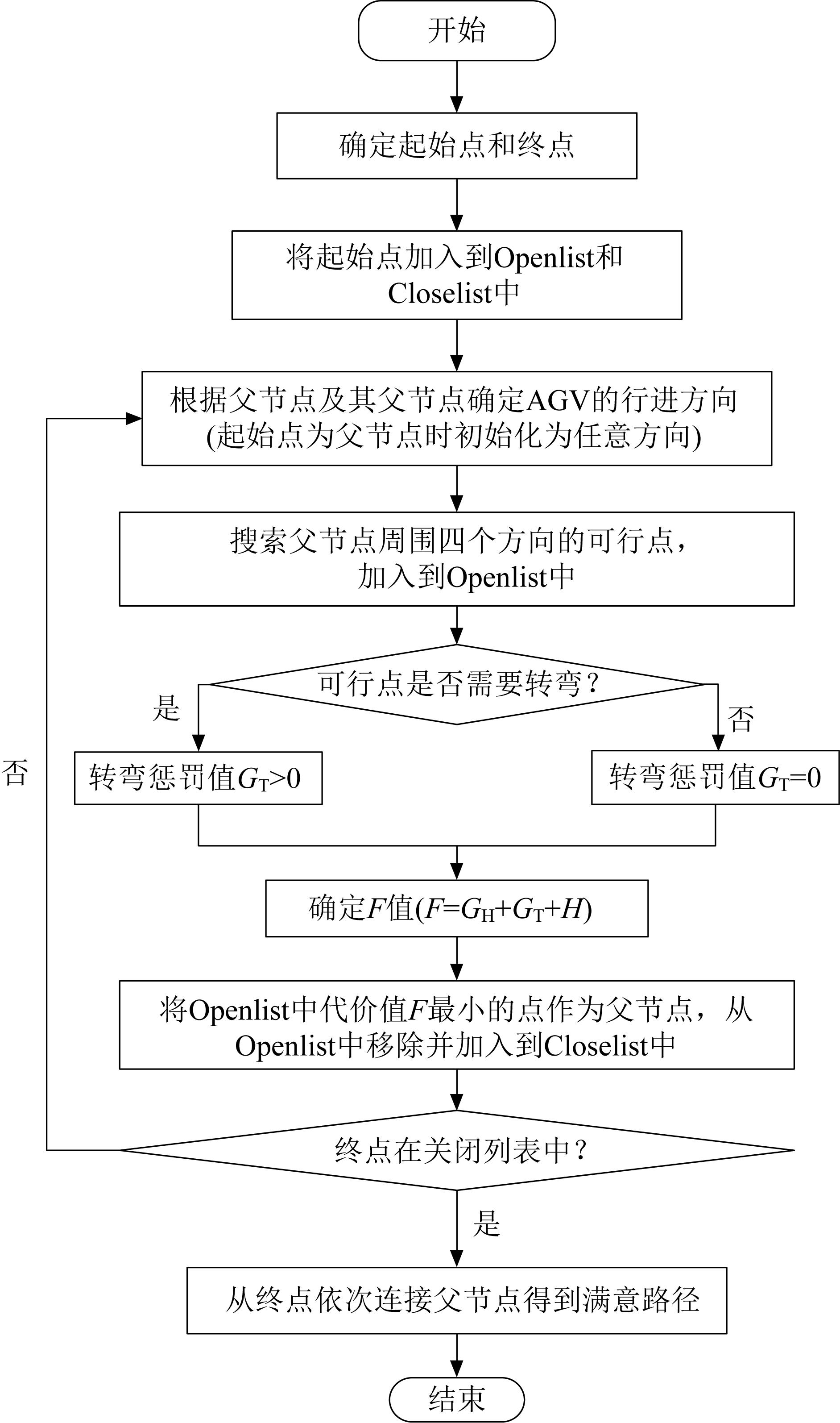
Fig. 6
Obstacle avoiding strategy based on priority level in waiting time
Table 2
Position coordinates of AGV
| AGV路径规划 | 栅格号 | 位置 |
|---|---|---|
| 1 | 1 084 | (22,34) |
| 2 | 2 413 | (49,13) |
| 3 | 1 845 | (37,45) |
| 4 | 788 | (16,38) |
| 5 | 2 129 | (43,29) |
Table 3
Position coordinates of tasks
| 任务编号 | 栅格序号 | 位置 | 任务编号 | 栅格序号 | 位置 |
|---|---|---|---|---|---|
| 1 | 866 | (18,16) | 16 | 121 | (3,21) |
| 2 | 1 315 | (27,15) | 17 | 72 | (2,22) |
| 3 | 383 | (8,33) | 18 | 1 877 | (38,27) |
| 4 | 447 | (9,47) | 19 | 1 312 | (27,12) |
| 5 | 1 860 | (38, 10) | 20 | 425 | (9,25) |
| 6 | 821 | (17,21) | 21 | 137 | (3,37) |
| 7 | 746 | (15,46) | 22 | 1 858 | (38,8) |
| 8 | 2 366 | (48,16) | 23 | 285 | (6,35) |
| 9 | 1 179 | (24,29) | 24 | 1 618 | (33,18) |
| 10 | 1 634 | (33,34) | 25 | 1 270 | (26,20) |
| 11 | 696 | (14,46) | 26 | 1 885 | (38,35) |
| 12 | 1 789 | (36,39) | 27 | 656 | (14,6) |
| 13 | 2 306 | (47,6) | 28 | 1 497 | (30,47) |
| 14 | 2 338 | (47,38) | 29 | 883 | (33,18) |
| 15 | 1 487 | (30,37) | 30 | 268 | (6,18) |
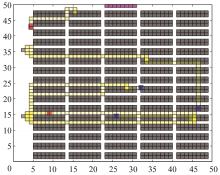
Fig. 7
Path of AGVs in completing the task
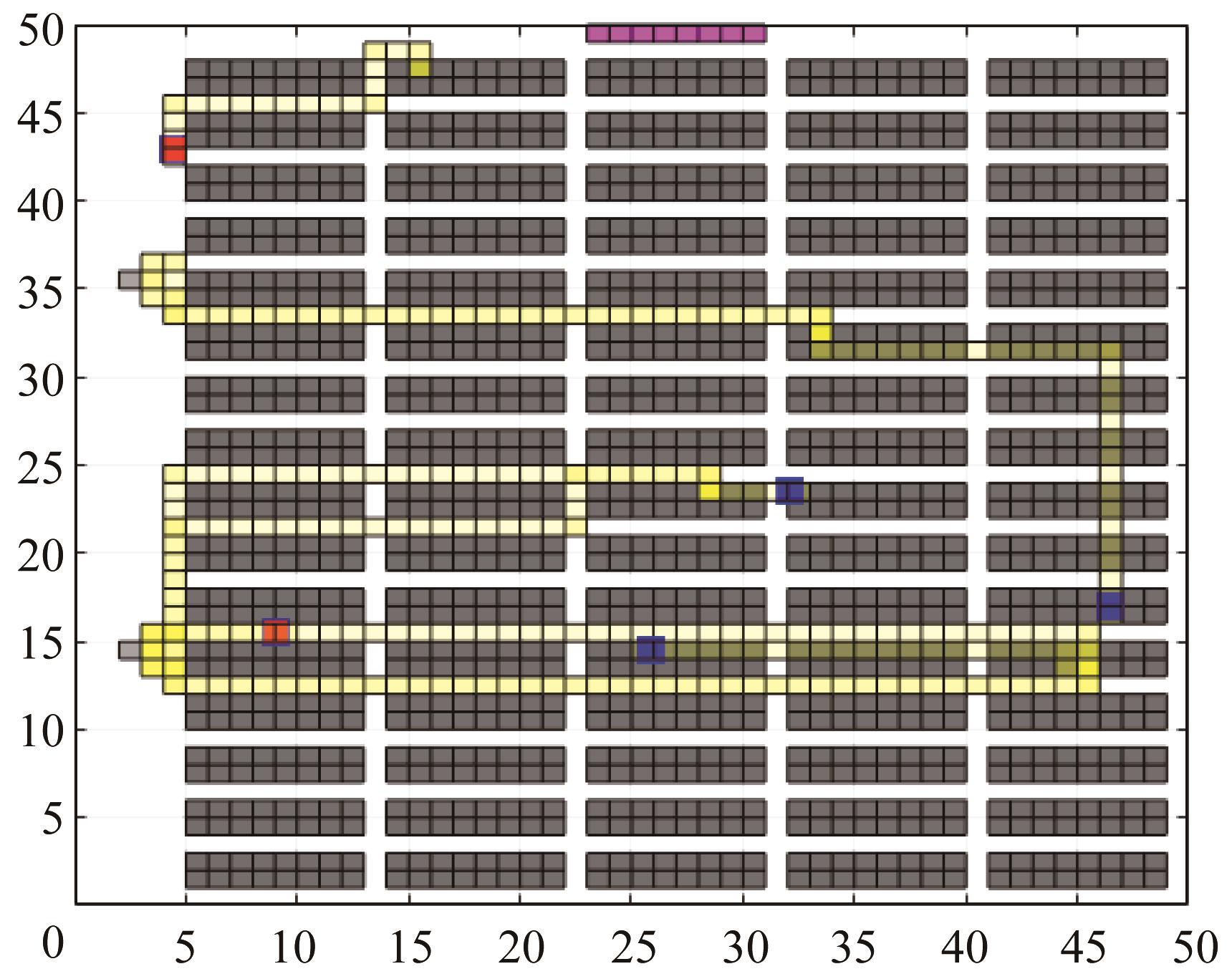
Fig. 8
Path of No.5 AGV
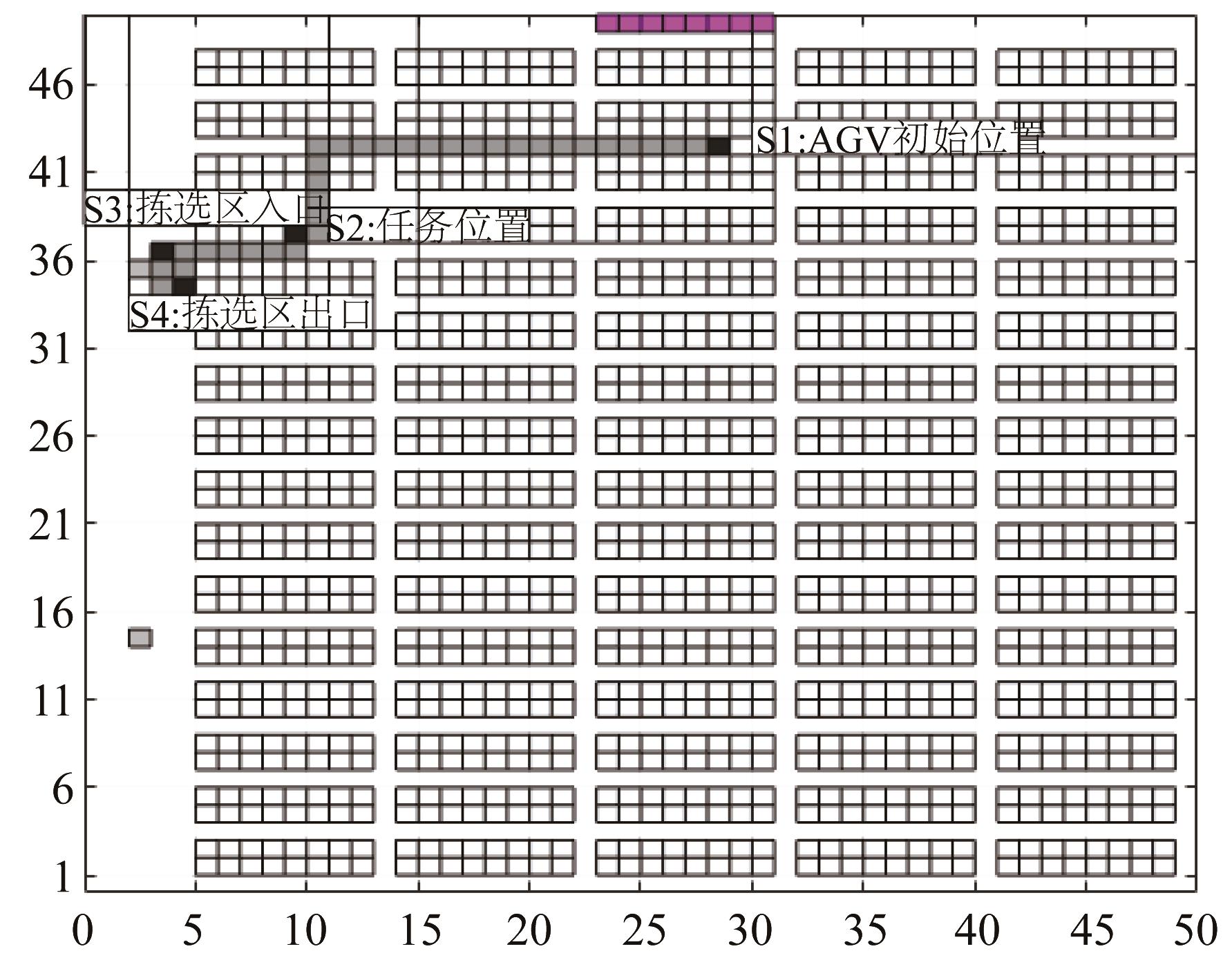
Table 4
Turns and obstacle avoidance waiting time during AGV running
| 序号 | 转弯次数/次 | 避障时间/s | 任务分配结果 | 目标拣选台 |
|---|---|---|---|---|
| 1 | 26 | 52 | 1,7,13,18,22,25 | 1,1,2,2,2,1 |
| 2 | 26 | 62 | 2,8,12,17,23,29 | 2,2,2,1,1,1 |
| 3 | 27 | 56 | 4,10,15,19,24,26 | 1,2,2,2,2,2 |
| 4 | 30 | 96 | 1,9,14,20,27,30 | 1,1,2,1,1,1 |
| 5 | 29 | 58 | 5,6,11,16,21,28 | 2,1,1,1,1,2 |
Table 5
Task completion time under different optimization objectives
| 避障及转弯处理 | 优化结果 | 时间统计 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 避障处理 | 转弯处理 | 可否穿行 货架 | 任务完成 时间 | AGV行走总 时间 | 转弯时间 | 避障时间 | 转弯避障总时间 | ||
| 任务序号优先级 | 无 | 否 | 782 | 3 591 | 322 | 444 | 766 | ||
| 任务序号优先级 | 无 | 是 | 722 | 3 284 | 246 | 313 | 559 | ||
| 任务序号优先级 | 有 | 否 | 707 | 3 360 | 312 | 269 | 581 | ||
| 任务序号优先级 | 有 | 是 | 684 | 3 203 | 262 | 241 | 503 | ||
| 避障时间优先级 | 有 | 否 | 701 | 3 349 | 310 | 249 | 559 | ||
| 避障时间优先级 | 有 | 是 | 662 | 3 211 | 276 | 234 | 510 | ||
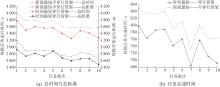
Fig. 9
Total time and total distance and complete time for 10 batches of tasks under constraint walking under shelf
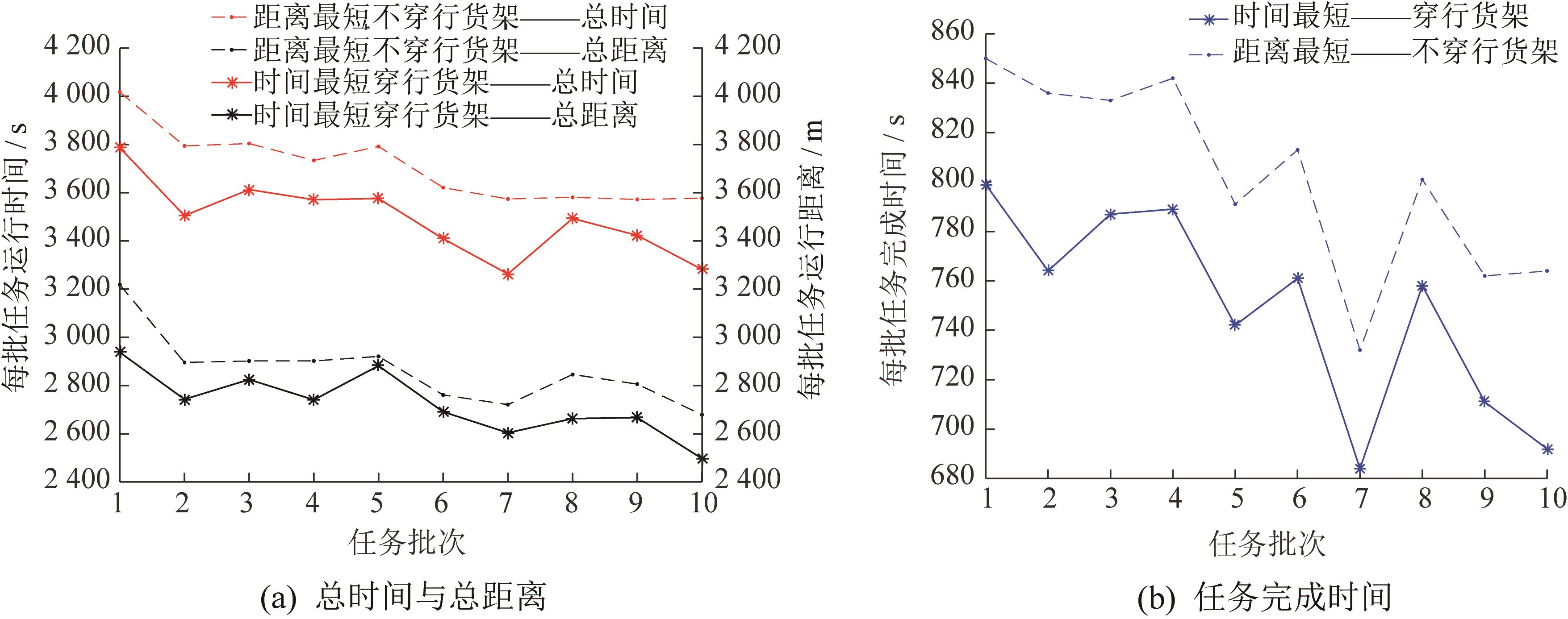
Fig. 10
Path of No.1 AGV for all tasks under different object
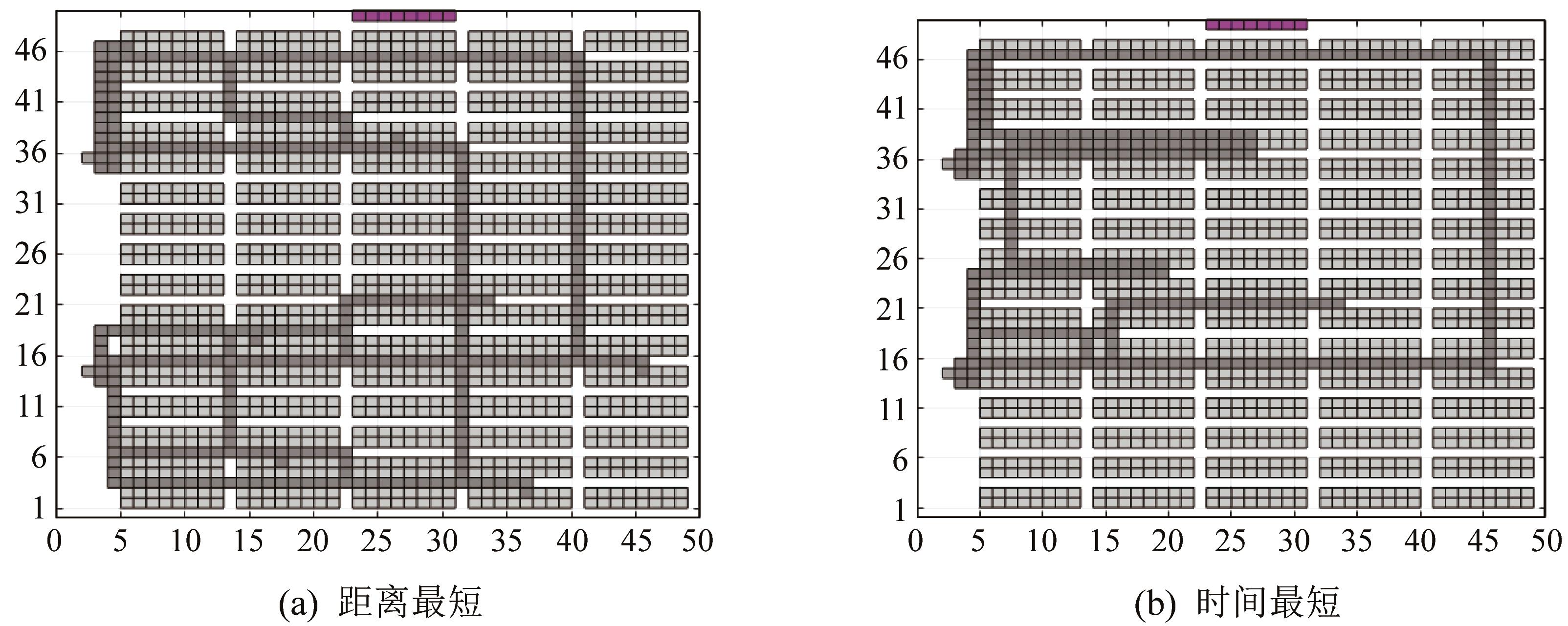
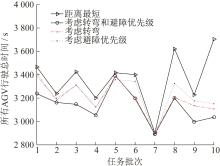
Fig. 11
Total time for 10 batches of tasks under different optimization objectives
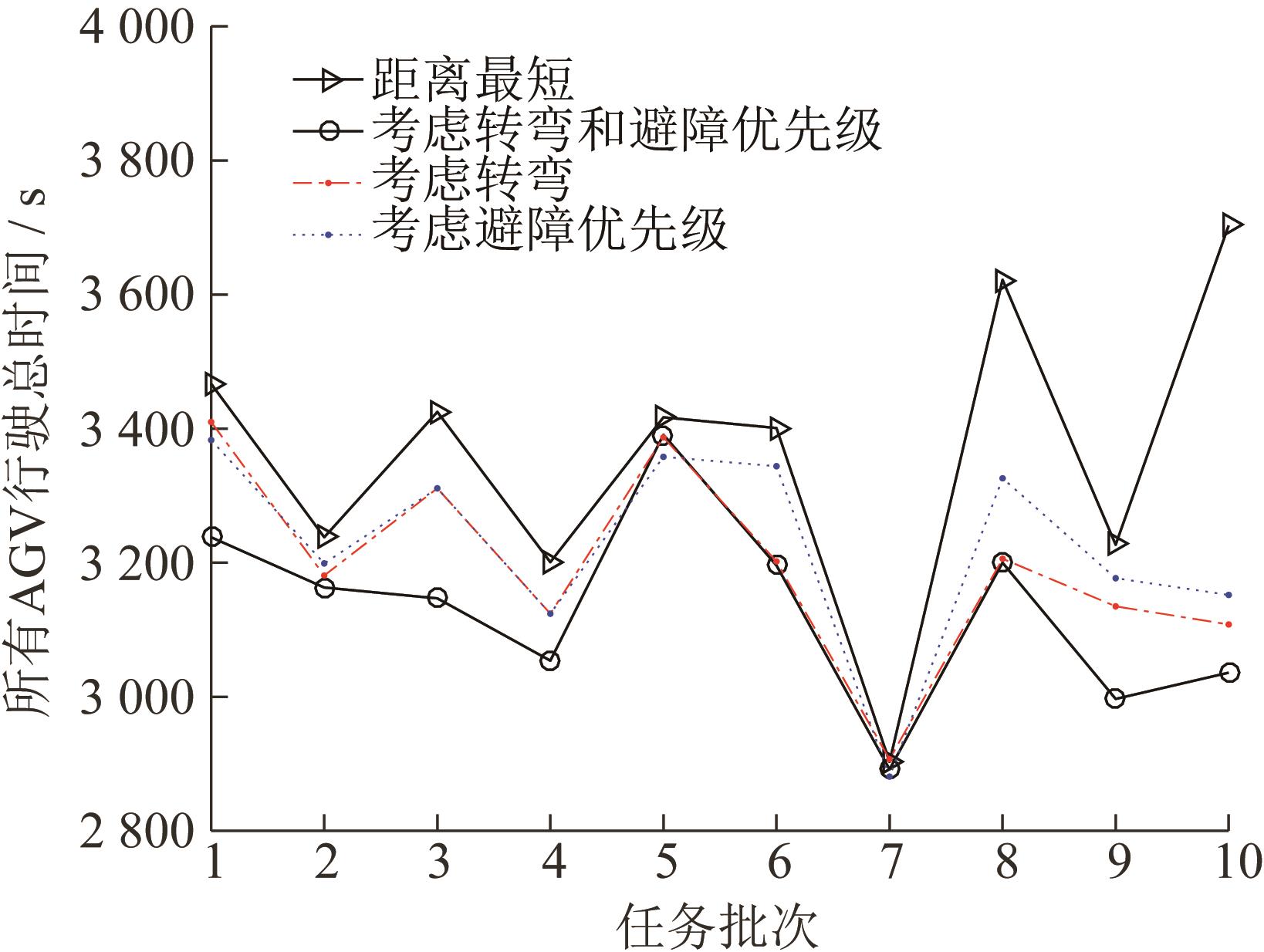
Fig. 12
Total distance for 10 batches of tasks under different optimization objectives
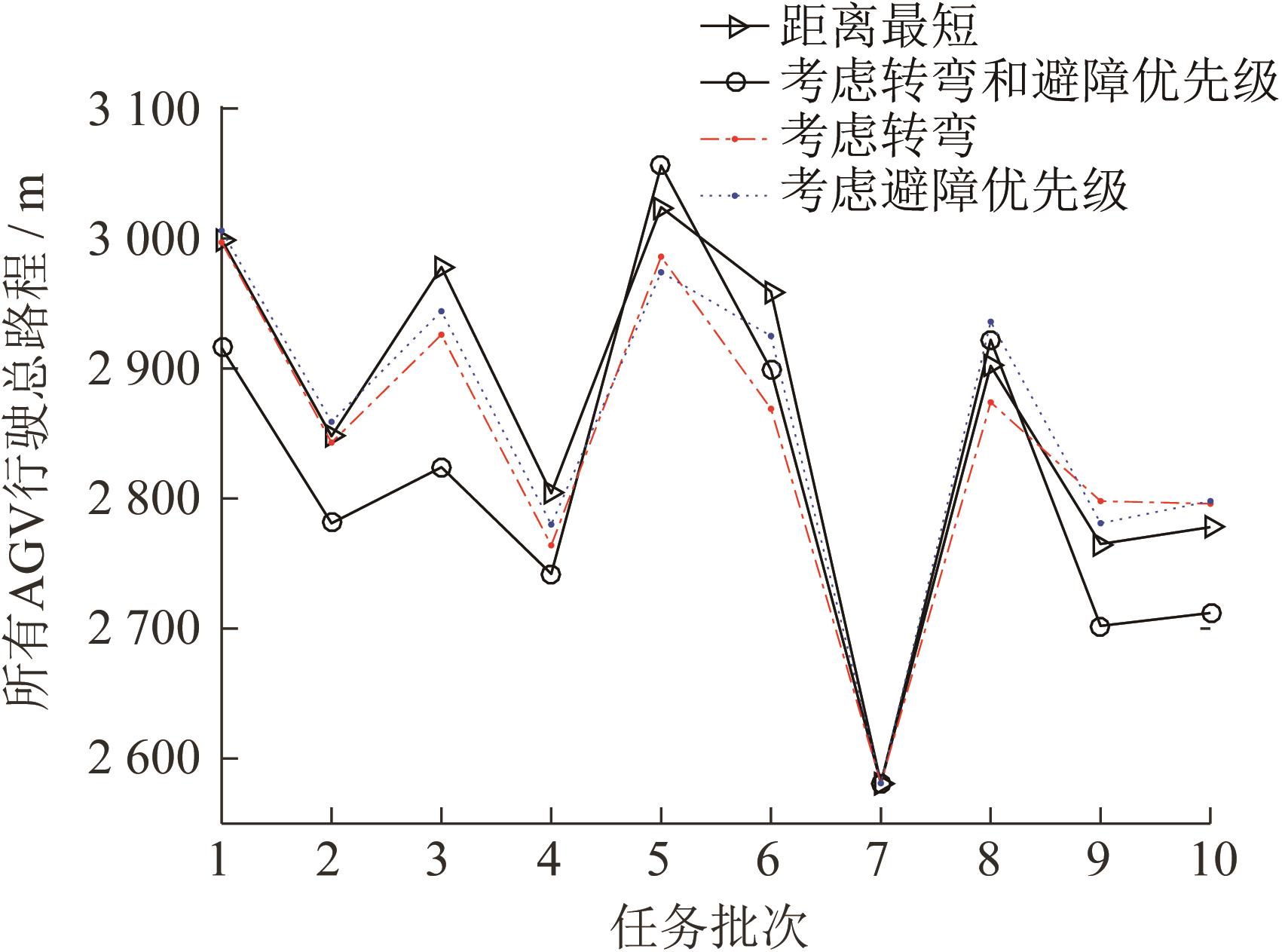
Fig. 13
Complete time for 10 batches of tasks under different optimization objectives
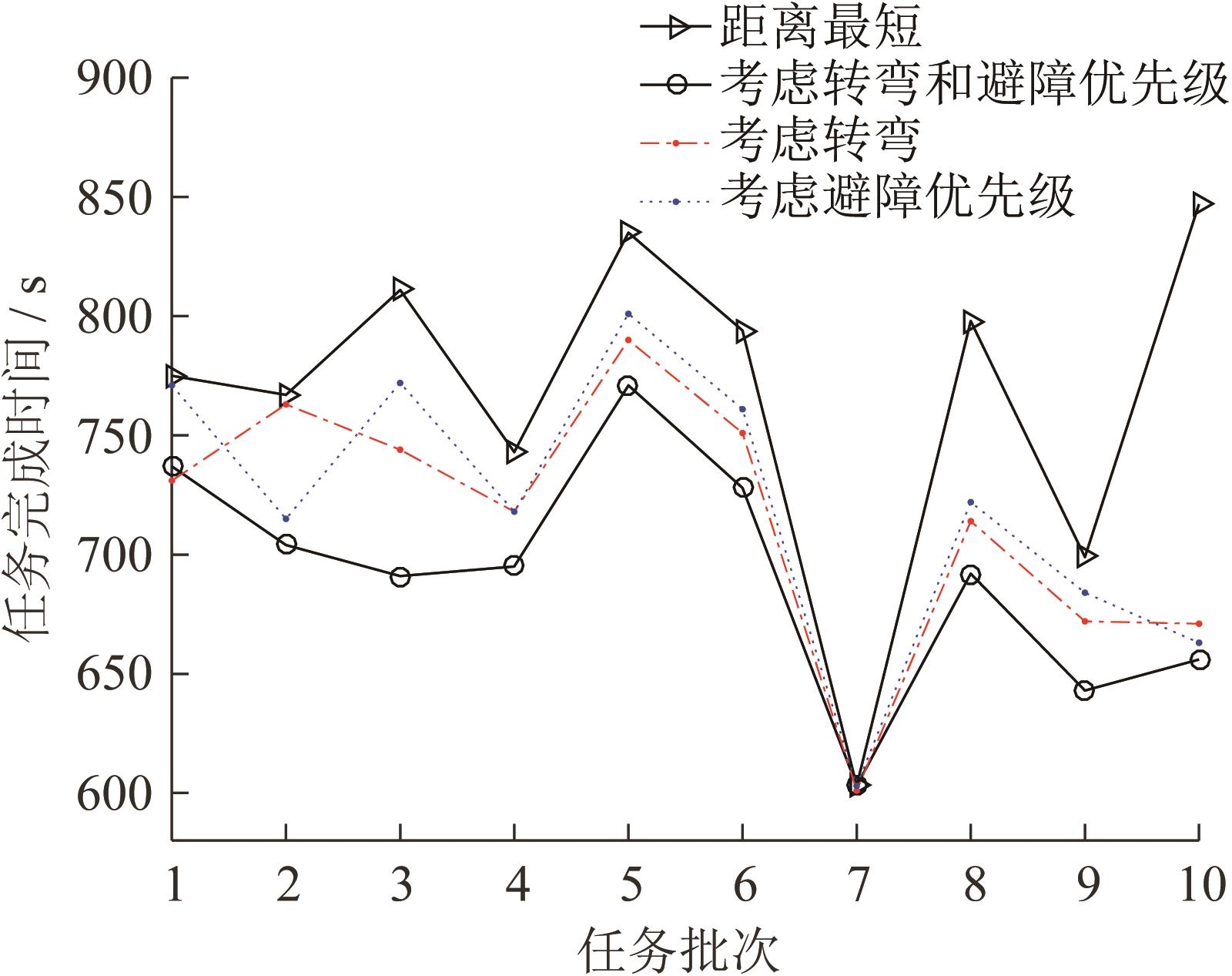
Table 6
Initial position coordinates of AGV
| AGV号 | 栅格序号 | 位置 | AGV号 | 栅格序号 | 位置 |
|---|---|---|---|---|---|
| 1 | 2474 | (59.24) | 6 | 2477 | (59.27) |
| 2 | 2475 | (59.25) | 7 | 2471 | (59.21) |
| 3 | 2473 | (59.23) | 8 | 2478 | (59.28) |
| 4 | 2476 | (59.26) | 9 | 2470 | (59.20) |
| 5 | 2472 | (59.22) | 10 | 2479 | (59.29) |
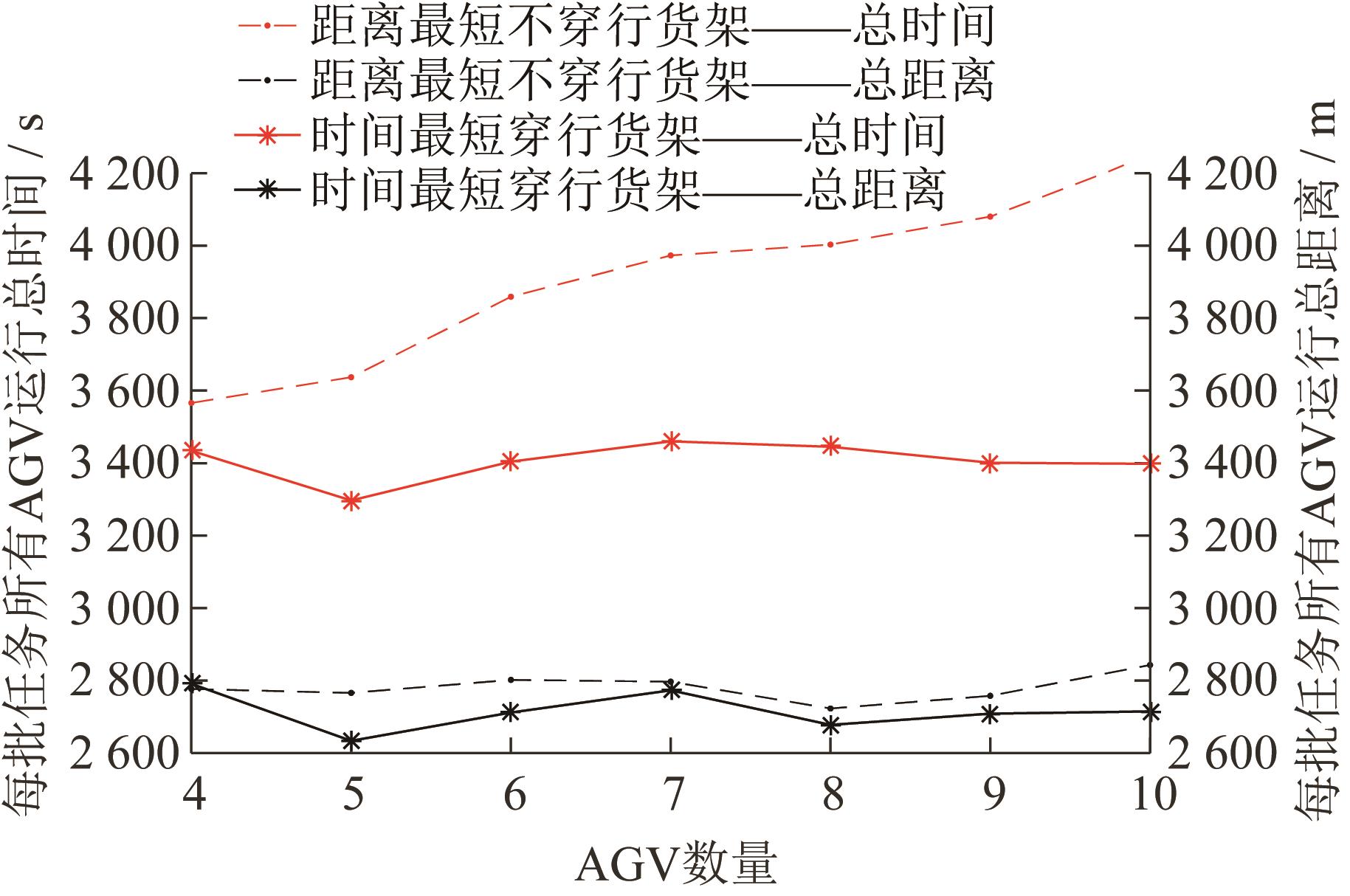
Fig. 14
Total operating time/distance of different quantity of AGVs
| 1 | ENRIGHT J, WURMAN P. Optimization and Coordinated Autonomy in Mobile Fulfillment Systems[C]// Automated Action Planning for Autonomous Mobile Robots. the 2011 AAAI Workshop, San Francisco, California, USA, August 7, 2011. AAAIPress, 2011: 33-38. |
| 2 | 徐翔斌, 马中强. 基于移动机器人的拣货系统研究进展[J]. 自动化学报, 2022, 48(1): 1-20. |
| Xu Xiangbin, Ma Zhongqiang. Robotic Mobile Fulfillment Systems: State-of-the-art and Prospects[J]. Acta Automatica Sinica. 2022, 48(1): 1-20. | |
| 3 | Da Costa Barros Ítalo Renan, Do Nascimento Tiago Pereira. Robotic Mobile Fulfillment Systems: A Survey on Recent Developments and Research Opportunities[J]. Robotics and Autonomous Systems (S0921-8890), 2021,137: 1-5. |
| 4 | Vivaldini K, Rocha L, Martarelli N, et al. Integrated Tasks Assignment and Routing for the Estimation of the Optimal Number of AGVS[J]. International Journal of Advanced Manufacturing Technology (S0268-3768), 2016, 82(4): 719-736. |
| 5 | Ma H, H-nig W, Cohen L, et al. Overview: A Hierarchical Framework for Plan Generation and Execution in Multirobot Systems[J]. IEEE Intelligent Systems (S1541-1672), 2017, 32(6): 6-12. |
| 6 | Kamoshida R, Kazama Y. Acquisition of Automated Guided Vehicle Route Planning Policy Using Deep Reinforcement Learning[C]// 6th IEEE International Conference on Advanced Logistics and Transport. Washington, D C, USA: IEEE, 2017: 1-6 |
| 7 | 邓向阳, 张立民, 方伟, 等. 基于双向汇聚引导蚁群算法的机器人路径规划[J]. 系统仿真学报, 2022, 34(5): 1101-1108. |
| Deng Xiangyang, Zhang Limin, Fang Wei, et al. Robot:Path Planning Based on Bidirectional Aggregation Ant Colony Optimization[J]. Journal of System Simulation,2022, 34(5): 1101-1108. | |
| 8 | 王梓强, 胡晓光, 李晓筱, 等. 移动机器人全局路径规划算法综述[J]. 计算机科学[J]. 2021, 48(10): 19-29. |
| Wang Ziqiang, Hu Xiaoguang, Li Xiaoxiao, et al. Overview of Global Path Planning Algorithms for Mobile Robots[J]. Computer Science, 2021, 48(10): 19-29. | |
| 9 | Lee C K M, Lin Bingbing, Ng K K H, et al. Smart Robotic Mobile Fulfillment System with Dynamic Conflict-free Strategies Considering Cyber-physical Integration[J]. Advanced Engineering Informatics (S1474-0346), 2019, 42(13): 1-12. |
| 10 | Guo Lixiao, Yang Qiang, Yan Wenjun. Intelligent Path Planning for Automated Guided Vehicles System Based on Topological Map[C]// 2012 IEEE Conference on Control Systems &Industrial Informatics. Washington, D C, USA: IEEE, 2012: 69-74. |
| 11 | 李荣华. 面向智能仓储的多机器人任务分配与路径规划研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. |
| LI Ronghua. Research on Task Assignment and Path Planning for Multi-robots for Intelligent Warehouse[D]. Harbin: Harbin Institute of Technology, 2017. | |
| 12 | Merschformann M, Lamballais T, Koster M D, et al. Decision Rules for Robotic Mobile Fulfillment Systems[J]. Operations Research Perspectives (S2214-7160),2019, 6: 1-15. |
| 13 | 张丹露, 孙小勇, 傅顺, 等. 智能仓库中的多机器人协同路径规划方法[J].计算机集成制造系统, 2018, 24(2): 410-418. |
| Zhang Danlu, Sun Xiaoyong, Fu Shun, et al. Cooperative Path Planning in Multi-robots for Intelligent Warehouse[J]. Computer Integrated Manufacturing Systems, 2018, 24(2): 410-418. | |
| 14 | Roy D, NIGAM S, DE KOSTER R, et al. Robot-storage Zone Assignment Strategies in Mobile Fulfillment Systems[J]. Transportation Research Part E: Logistics and Transportation Review (S1366-5545), 2019, 122: 119-142. |
| 15 | 张新艳, 邹亚圣. 基于改进A*算法的自动导引车无碰撞路径规划[J]. 系统工程理论与实践, 2021, 41(1): 240-246. |
| Zhang Xinyan, Zou Yasheng. Collision-free Path Planning for Automated Guided Vehicles Based on Improved A* Algorithm[J]. Systems Engineering-Theory & Practice, 2021, 41(1): 240-246. | |
| 16 | Dou Jiajia, Chen C hunlin, Yang Pei. Genetic Scheduling and Reinforcement Learning in Multirobot Systems for Intelligent Warehouses[M/OL]// Mathematical Problems in Engineering, 2015: 1-10 [2021-8-10].. |
| 17 | Yuan Ruiping, Dong Tingting, Li Juntao. Research on the Collision-free Path Planning of Multi-AGVs System Based on Improved A*algorithm[J]. American Journal of Operations Research (S2160-8849), 2016, 6(6): 442-449. |
| [1] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [2] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [3] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [4] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [5] | Lin Guijuan, Li Zihan, Wang Yu. Research on Improved A* Algorithm Path Planning Based on Global Key Point Extraction [J]. Journal of System Simulation, 2025, 37(3): 667-678. |
| [6] | Li Jiongyi, Li Qiang, Zhang Xinwen, Htet Zin Myo, Cai Yongbin. Improved Bidirectional A* Quadratic Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2025, 37(2): 498-507. |
| [7] | Xing Lijing, Li Min, Zeng Xiangguang, Zhang Ping, Peng Bei. AUV Path Planning Based on Behavior Cloning and Improved DQN in Partially Unknown Environments [J]. Journal of System Simulation, 2025, 37(11): 2754-2767. |
| [8] | Yang Lanying, Li Chao, Zou Haifeng, Wan Jiangtao, Zhang Renqiang, Liu Hui, Lu Hong. Robot Path Planning Optimization Based on Fusion of Improved Ant Colony Algorithm and A* Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2956-2965. |
| [9] | Xu Jianmin, Song Lei, Deng Dongdong, Chen Yaoruo, Yang Wei. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized DWA Algorithm [J]. Journal of System Simulation, 2025, 37(1): 257-270. |
| [10] | Ji Peng, Zhang Xinyuan, Gao Shuaixuan, Wei Shuorang. Path Planning Based on Improved A* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(9): 2171-2180. |
| [11] | Lai Rongshen, Dou Lei, Wu Zhiyong, Sun Shuai. Fusion of Improved A* and Dynamic Window Approach for Mobile Robot Path Planning [J]. Journal of System Simulation, 2024, 36(8): 1884-1894. |
| [12] | Yu Xiang, Deng Qianrui, Duan Sirui, Jiang Chen. A Multi-UAV Collaborative Priority Coverage Search Algorithm [J]. Journal of System Simulation, 2024, 36(4): 991-1000. |
| [13] | Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(3): 782-794. |
| [14] | Zhang Guohui, Zhang Ya'nan, Gao Ang, Xu Aoyu. Reconnaissance Mission Planning Method for Air-ground Heterogeneous Unmanned Systems [J]. Journal of System Simulation, 2024, 36(2): 497-510. |
| [15] | Yao Dexin, San Hongjun, Wang Yaru, Sun Haijie, Chen Jiupeng, Yang Xiaoyuan. Improvement of A* Algorithm in Path Planning of Mobile Robot [J]. Journal of System Simulation, 2024, 36(11): 2684-2698. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
