

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (1): 257-270.doi: 10.16182/j.issn1004731x.joss.23-1089
• Papers • Previous Articles Next Articles
Xu Jianmin1,2, Song Lei1,2, Deng Dongdong1,2, Chen Yaoruo1,2, Yang Wei1,2
Received:2023-09-05
Revised:2023-11-01
Online:2025-01-20
Published:2025-01-23
CLC Number:
Xu Jianmin, Song Lei, Deng Dongdong, Chen Yaoruo, Yang Wei. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized DWA Algorithm[J]. Journal of System Simulation, 2025, 37(1): 257-270.
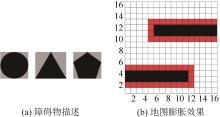
Fig. 1
Map description
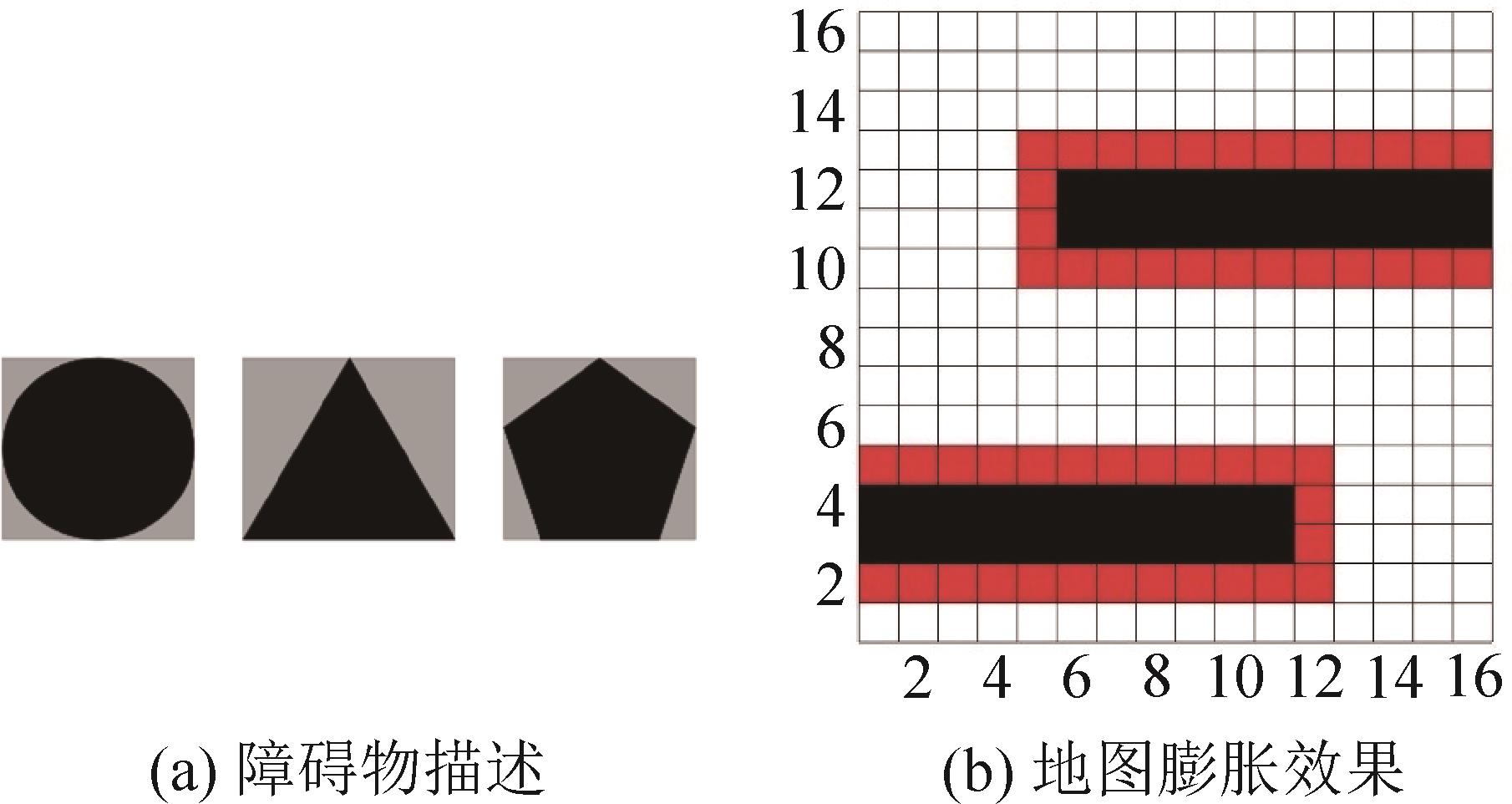

Fig. 2
Comparison between improved A * and traditional A*
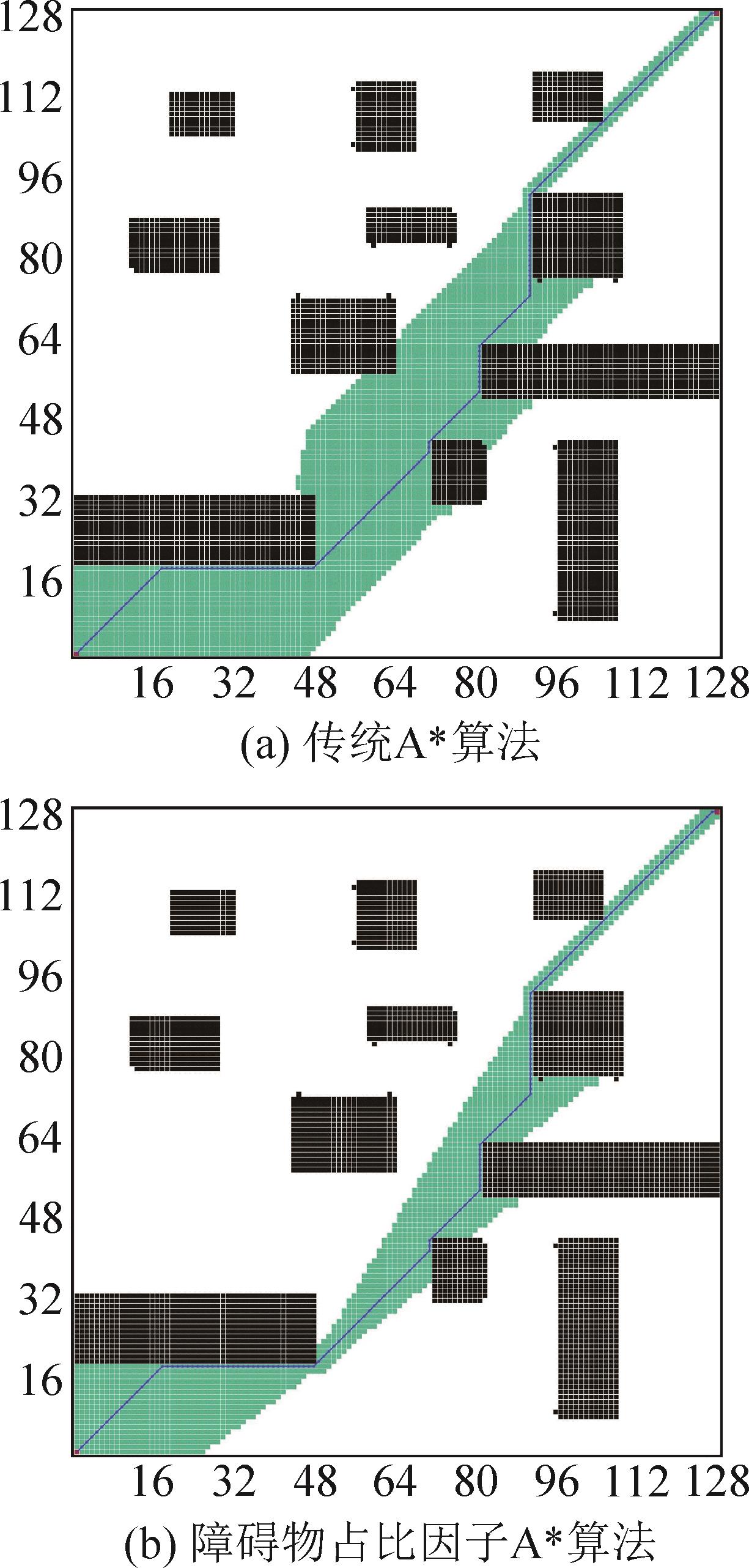
Fig. 3
Multi-scale subgraph set
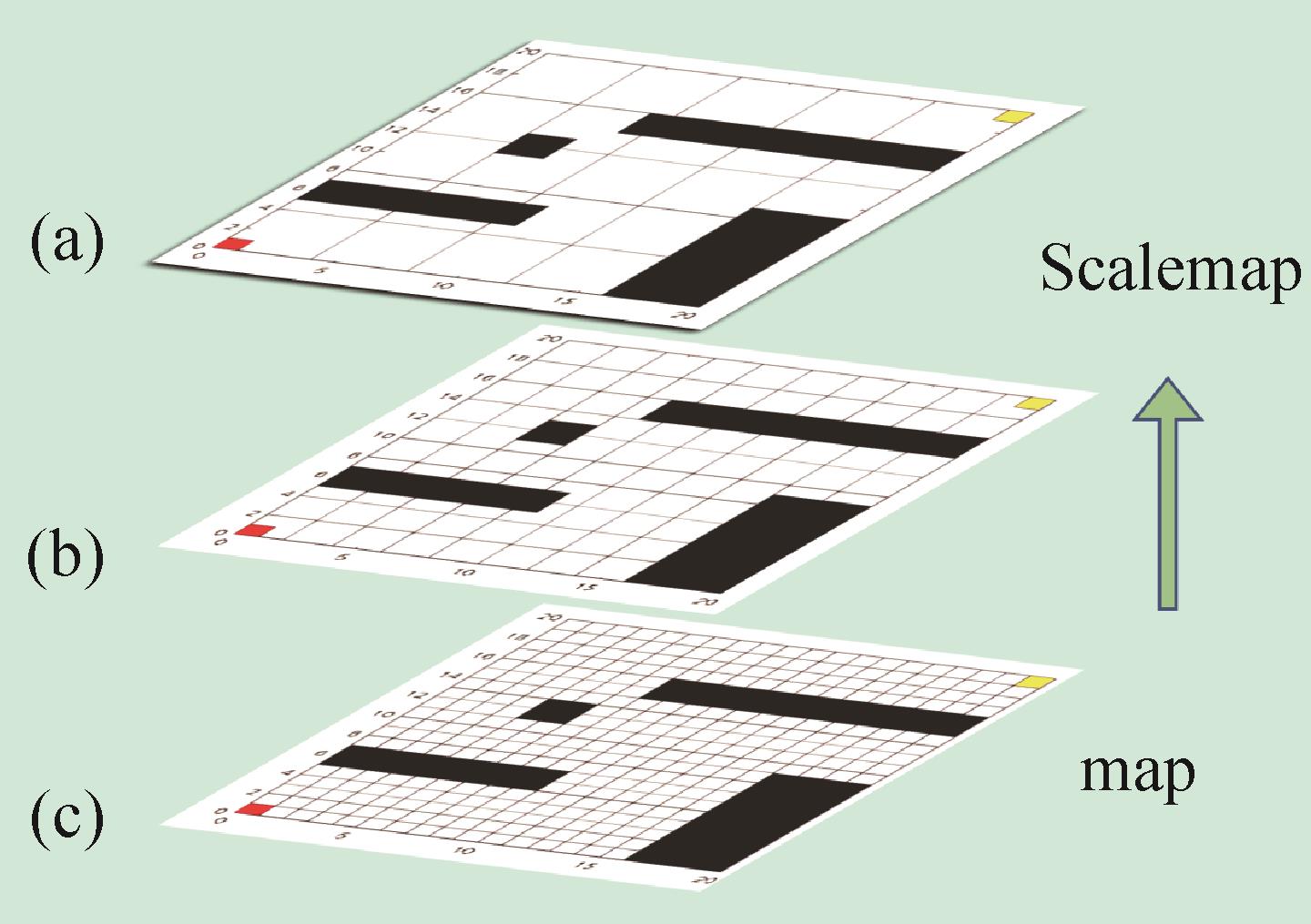
Table 1
Coarse-scale subgraph planning algorithm
算法1:多尺度子图法和粗尺度最佳规划算法 | |
|---|---|
输入: | 粗-细尺度地图数据集O={x, y}; 起点位置和终点位置Sp, Tp |
输出: | 选出的粗尺度MC;粗尺度最优路径cop |
步骤1: | 由输入数据集O={x, y}绘制多尺度图,多尺度图集为M={M1,M2,…,Mn } |
步骤2: | 从多尺度图集M={M1,M2,…,Mn }中选择合适的粗尺度图Mk,以反映细尺度地图地形的基本起伏特征,并包含尽可能少的节点 |
步骤3: | 应用改进A*算法计算在步骤2中选取的粗尺度地图Mk 的最优路径cop |
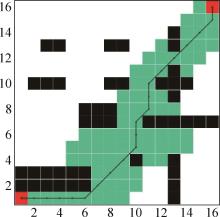
Fig. 4
Optimal path in coarse-scale map
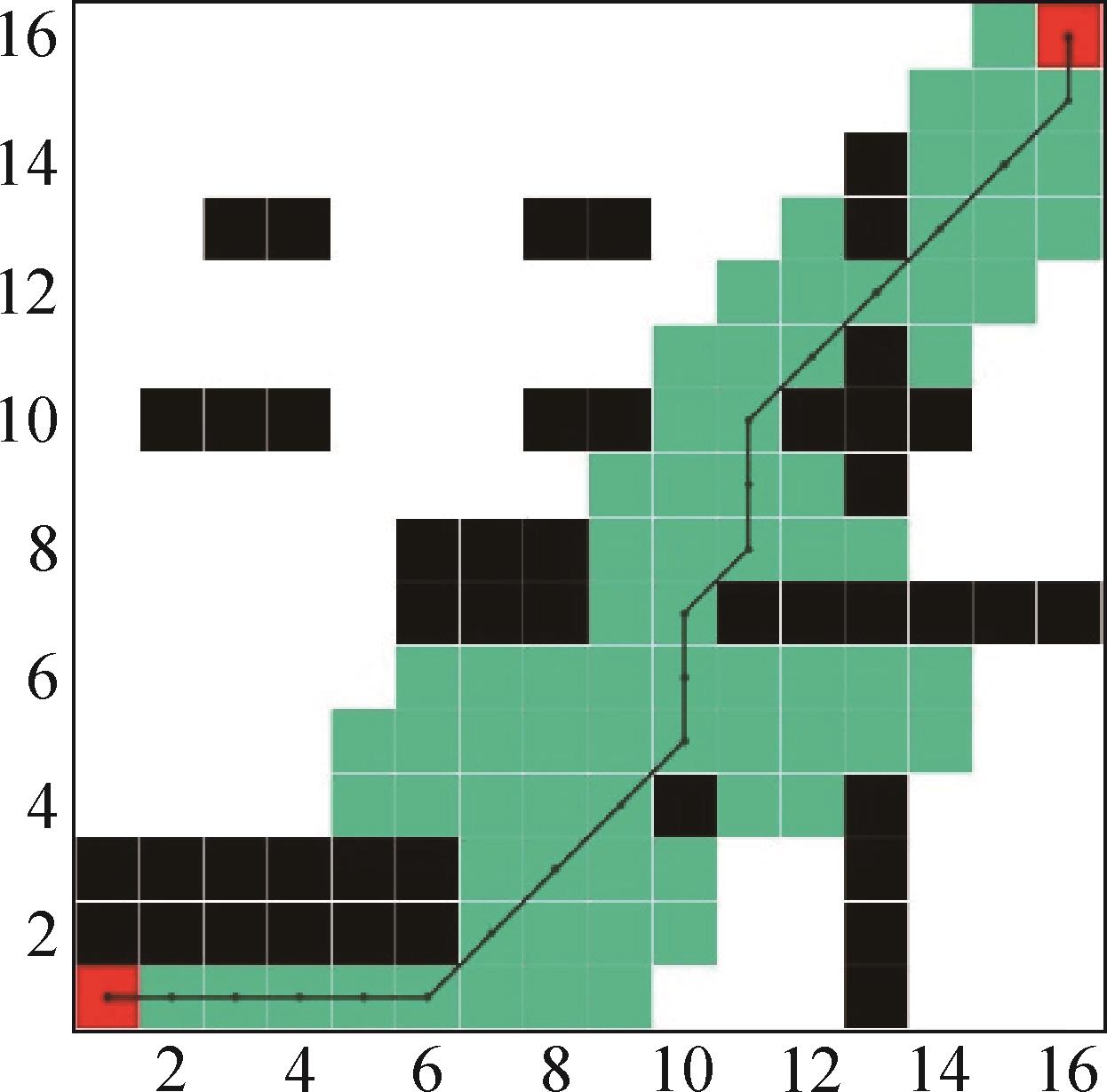
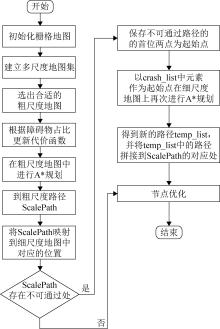
Fig. 5
Flow of multi-scale map method A * algorithm
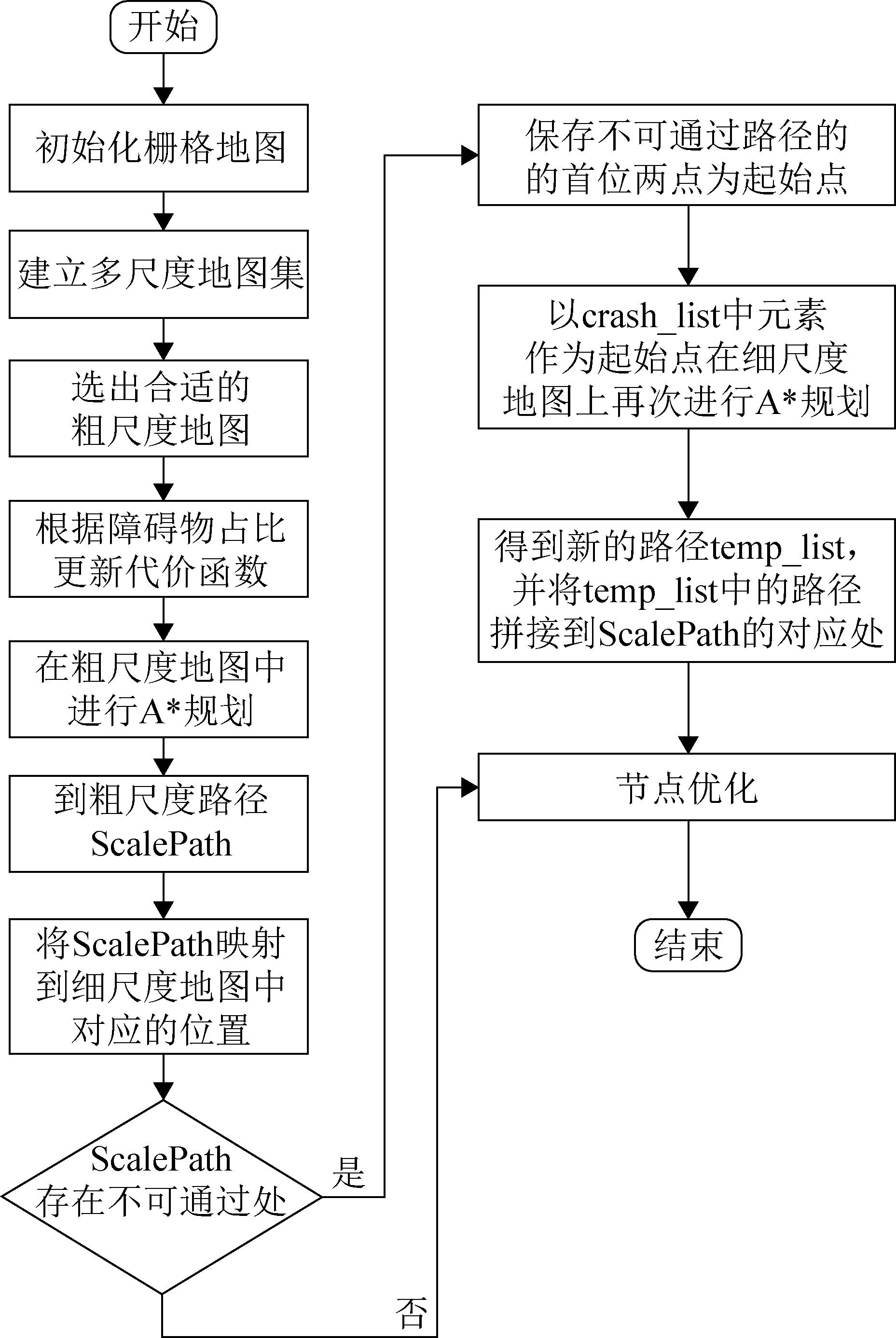
Table 2
Fine-scale master graph planning algorithm
算法2:多尺度子图法和细尺度最佳规划算法 | |
|---|---|
输入: | 粗比例尺度子图和细比例母图MC, MF; 粗比例尺度子图最优路径cop |
输出: | 细比例尺度母图最优路径fop |
步骤1: | 将cop映射到细尺度母图中,从cop1开始依次与下一个节点cop2相连并判断连线是否经过障碍物,否则将路径点加U中,是则判节点cop2是否为障碍物,如果不为障碍物就将cop1,cop2作为新的起点和终点放入集合A中,如果为障碍物则判断cop2的下一个节点是否为障碍物,直到下一个节点copn不为障碍物为止,将cop1,copn做为新的起点和终点放入集合A中,从节点copn继续重复上面的步骤直到到达cop中的最后一个节点 |
步骤2: | 在细尺度母图中使用改进A*算法计算步骤1中得到的新的起点和终点A的最优路径,并将最优路径加入对应的路径点集U中 |

Fig. 6
Improved A * algorithm
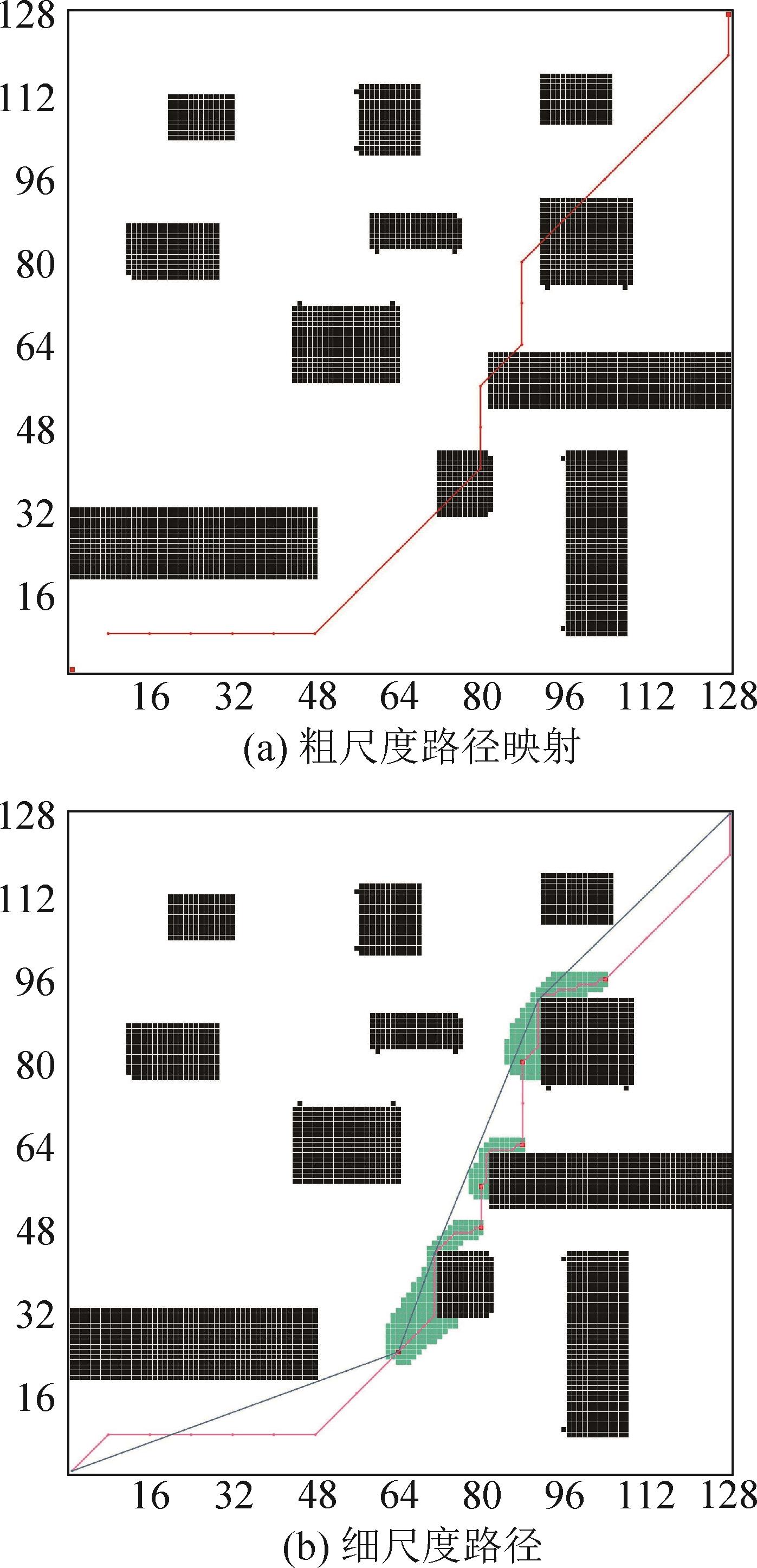
Fig. 7
Traditional DWA algorithm and adaptive adjustment strategy for changing course angle DWA algorithm
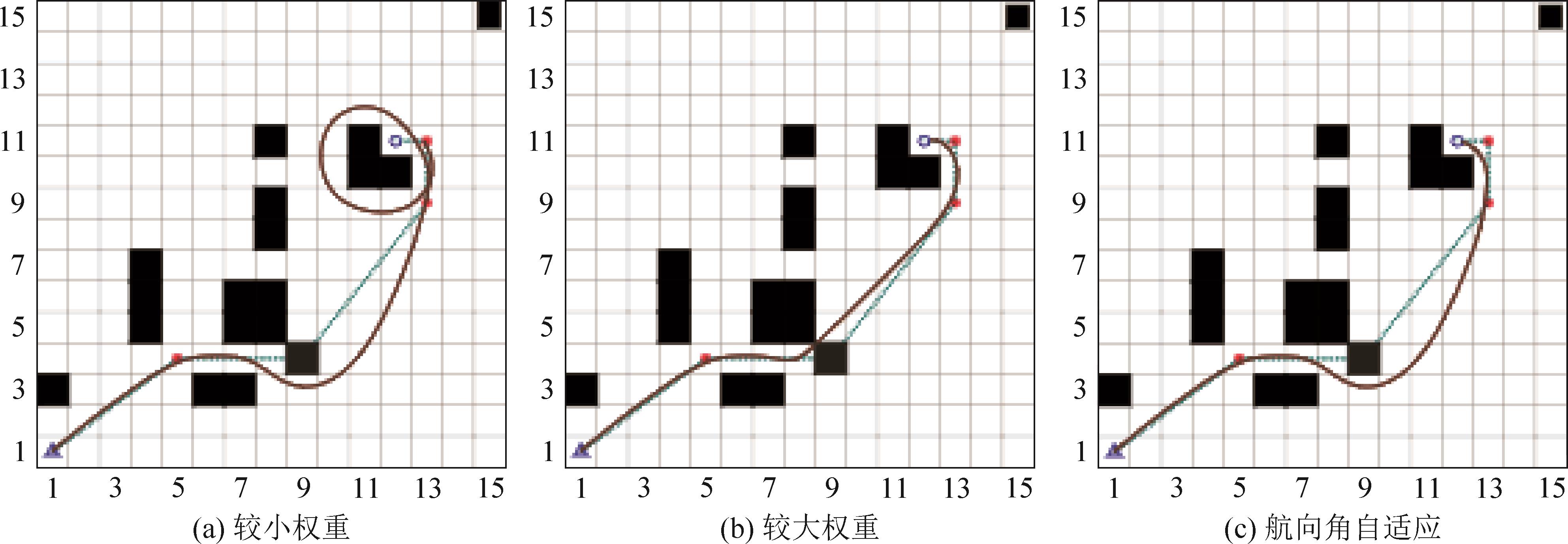

Fig. 8
Traditional DWA algorithm and improved parking waiting DWA algorithm
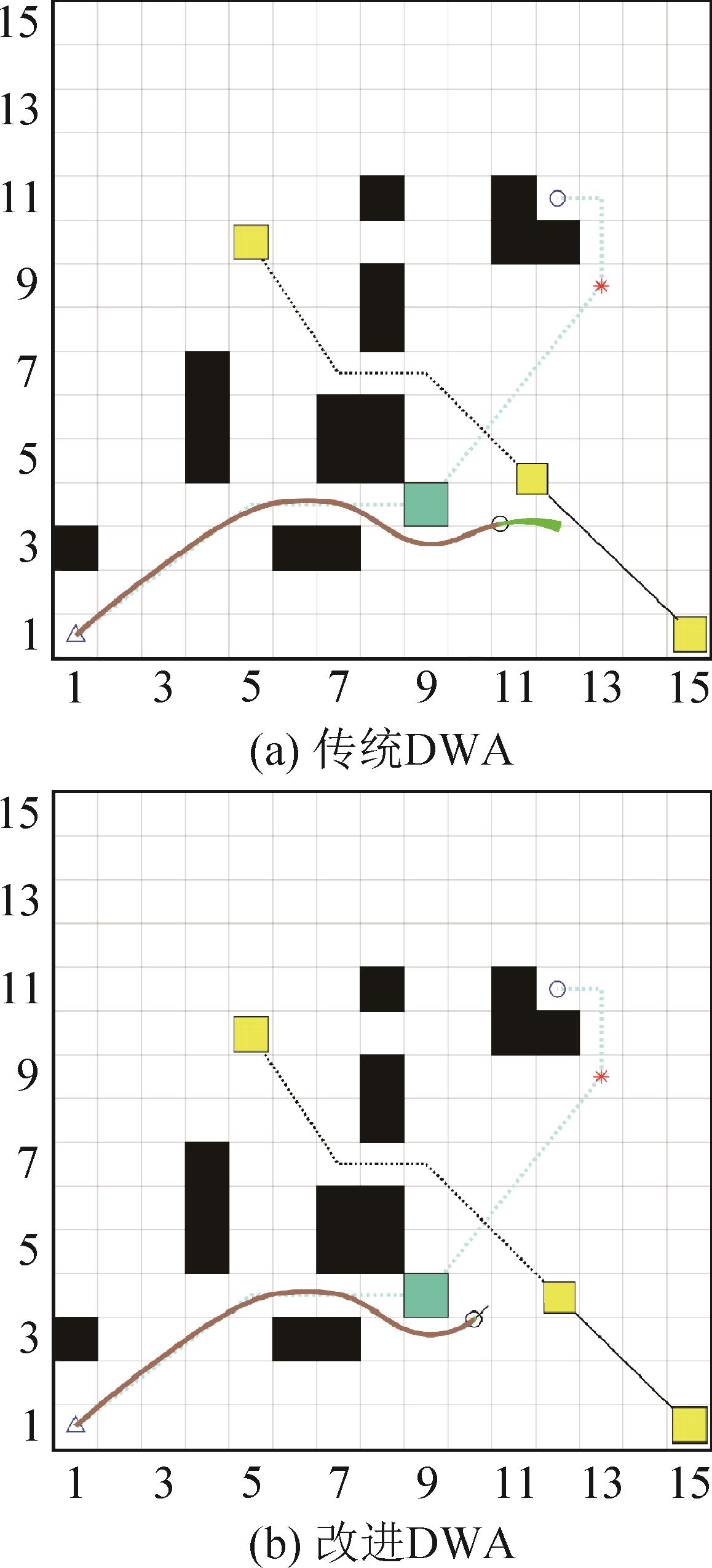
Fig. 9
Fusion algorithm flow

Fig. 10
Simulation result
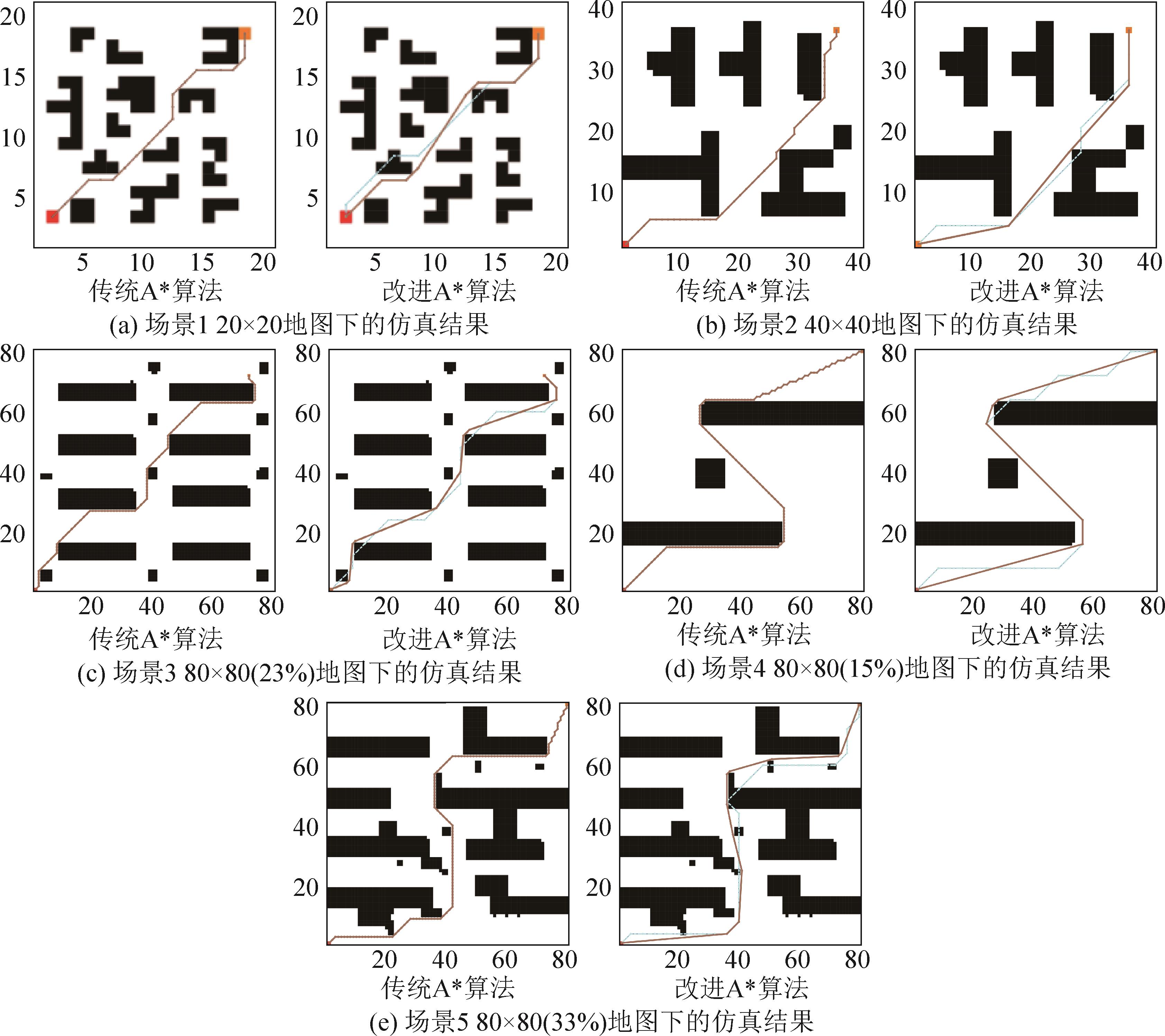
Table 3
Performance comparison between improved A* algorithm and traditional algorithm
| 栅格地图大小 | 算法类型 | 遍历节点个数 | 耗费时间 | 路径长度/m | 折点数 | 节点减少率/% | 时间减少率/% | 路径长减少率/% | 折点数减少率/% |
|---|---|---|---|---|---|---|---|---|---|
地图1 20×20 | 传统A* | 124 | 0.003 9 | 24.556 3 | 7 | 47 | 35.9 | 1.8 | |
| 改进A* | 66 | 0.002 5 | 24.110 6 | 7 | |||||
地图2 40×40 | 传统A* | 395 | 0.012 | 55.941 | 11 | 72.9 | 62.5 | 2.1 | 81.8 |
| 改进A* | 107 | 0.004 5 | 54.783 | 2 | |||||
地图3 80×80 (23%) | 传统A* | 2 705 | 0.113 | 120.812 | 15 | 88.5 | 82.5 | 1.5 | 33.3 |
| 改进A* | 311 | 0.019 75 | 119.034 | 10 | |||||
地图4 80×80 (15%) | 传统A* | 3 953 | 0.133 6 | 177.681 2 | 39 | 96.7 | 94.4 | 2.2 | 84.6 |
| 改进A* | 123 | 0.007 4 | 173.822 5 | 6 | |||||
地图5 80×80 (33%) | 传统A* | 2 800 | 0.097 3 | 151.840 6 | 23 | 82.1 | 72.6 | 3.3 | 73.9 |
| 改进A* | 500 | 0.026 7 | 146.881 3 | 9 |

Fig. 11
Performance comparison of improved A* algorithm in maps
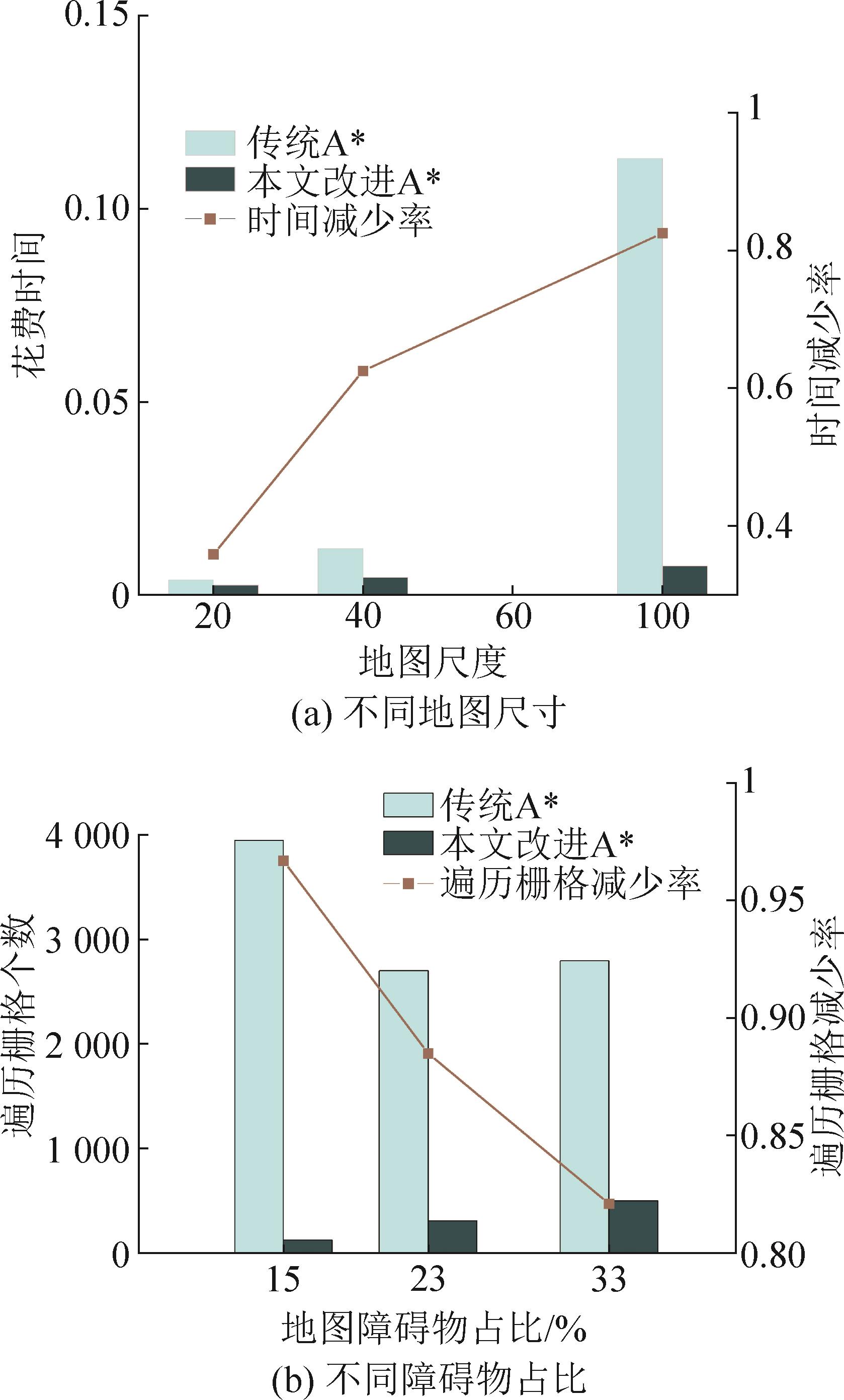

Fig. 12
Traditional DWA algorithm and improved fusion algorithm
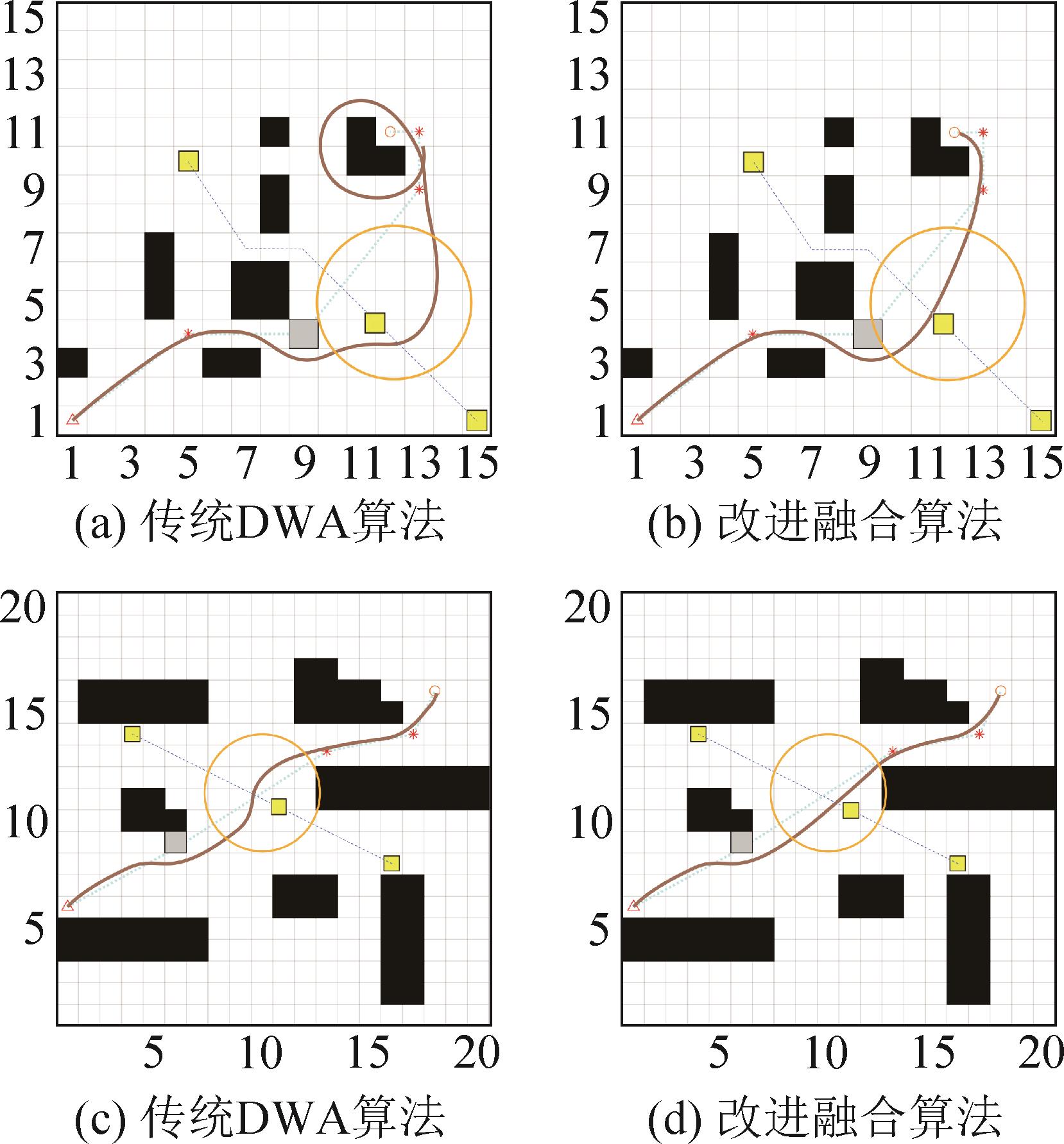
Fig. 13
Curve diagram of speed changing with posture during path planning
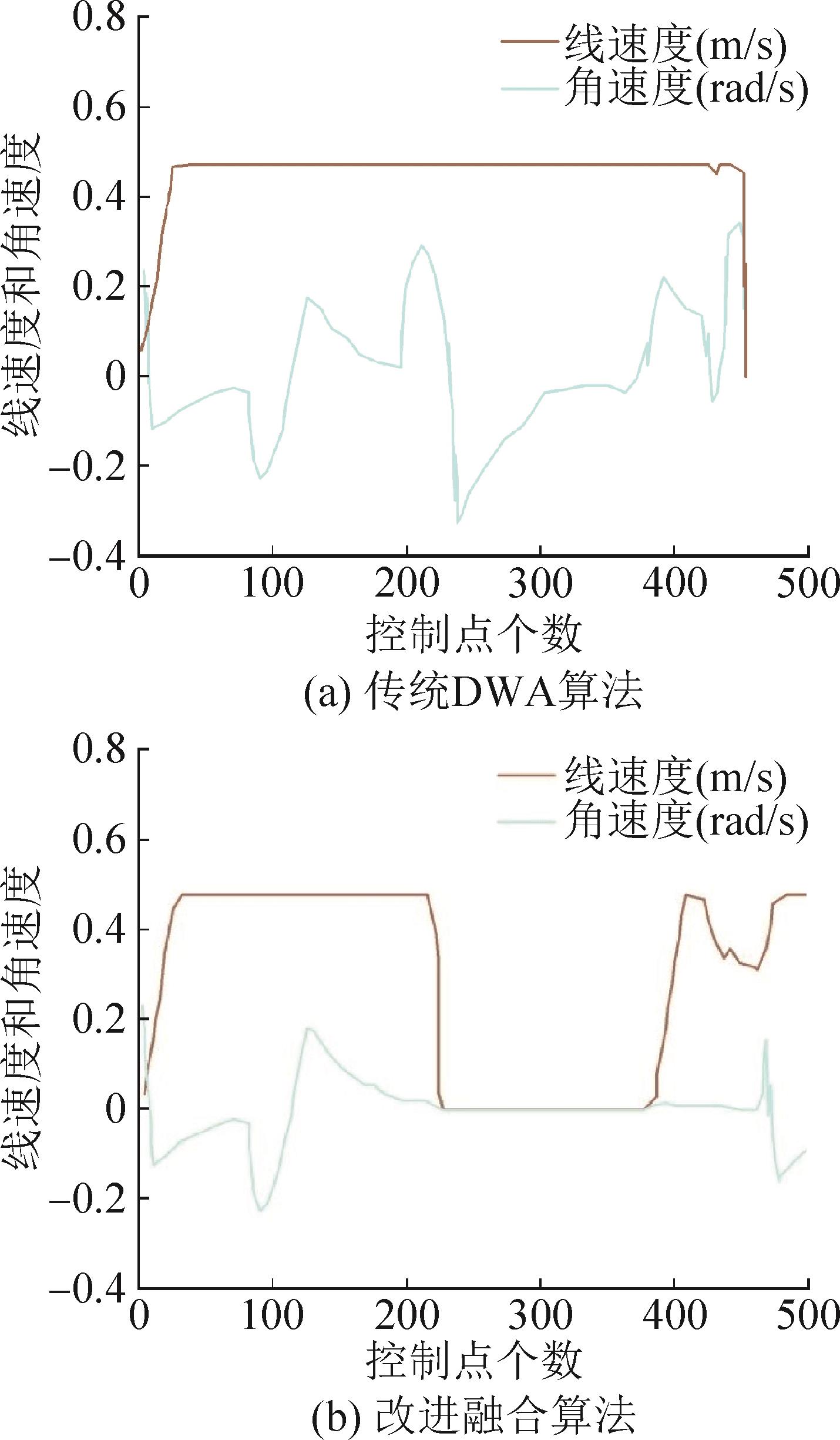

Fig. 14
Experimental instruments and environment
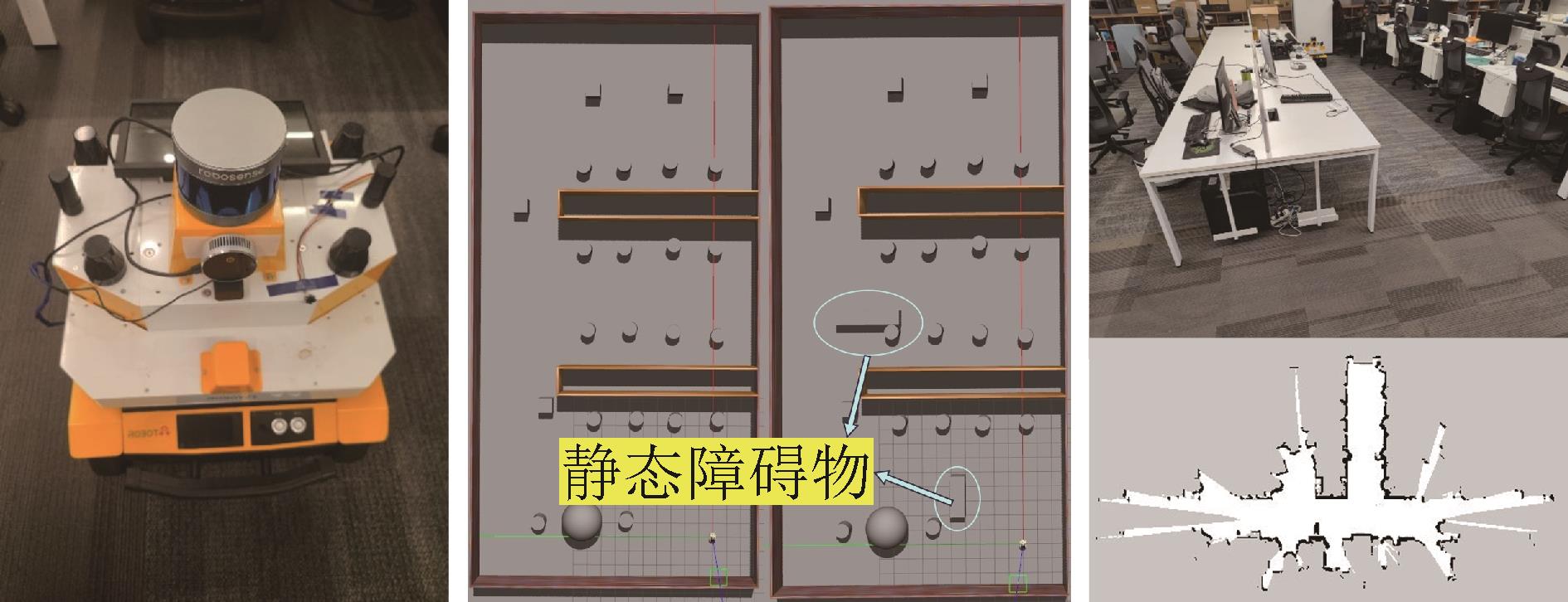
Fig. 15
A* algorithm results
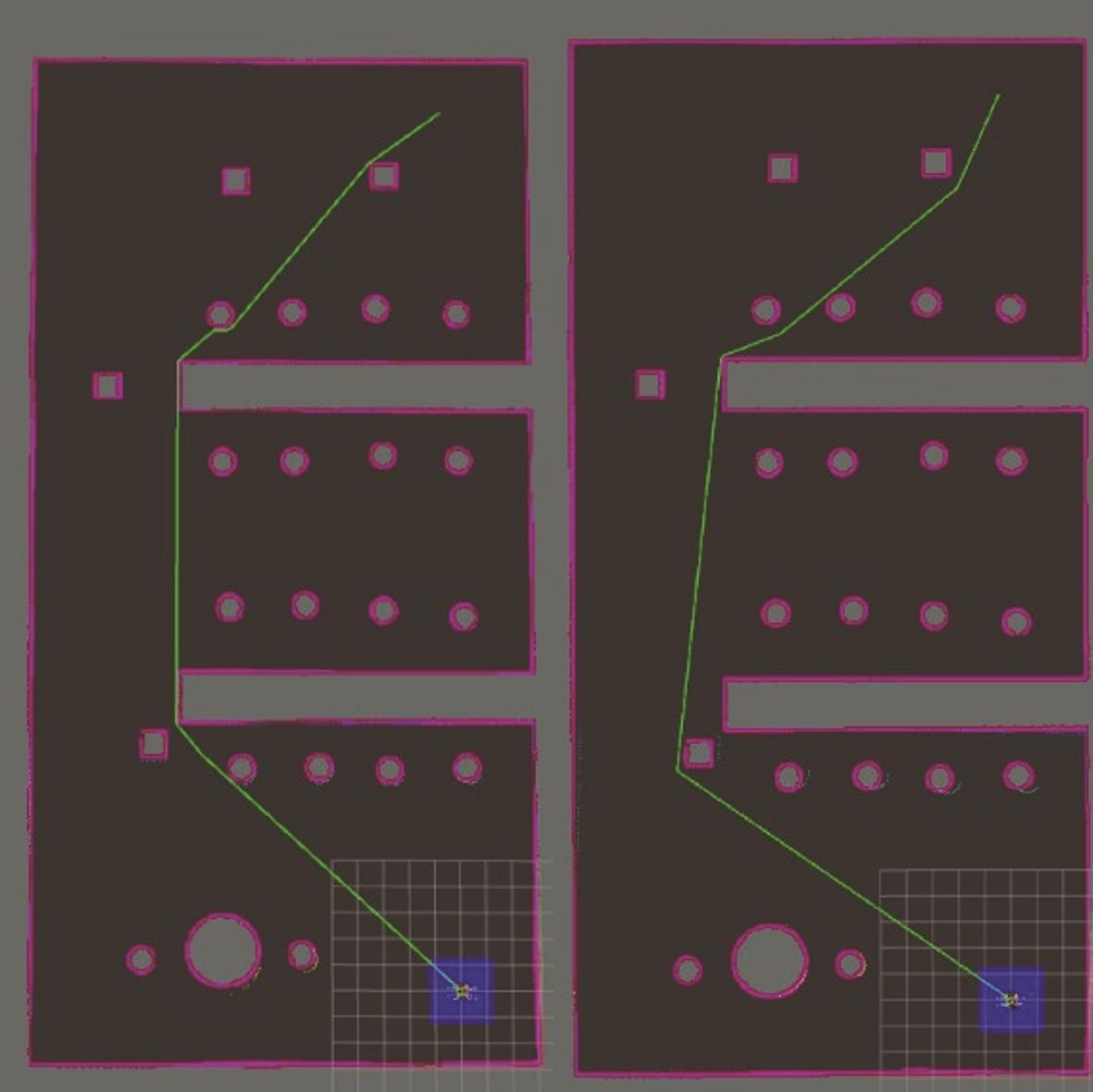
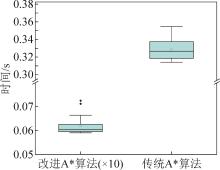
Fig. 16
Search time
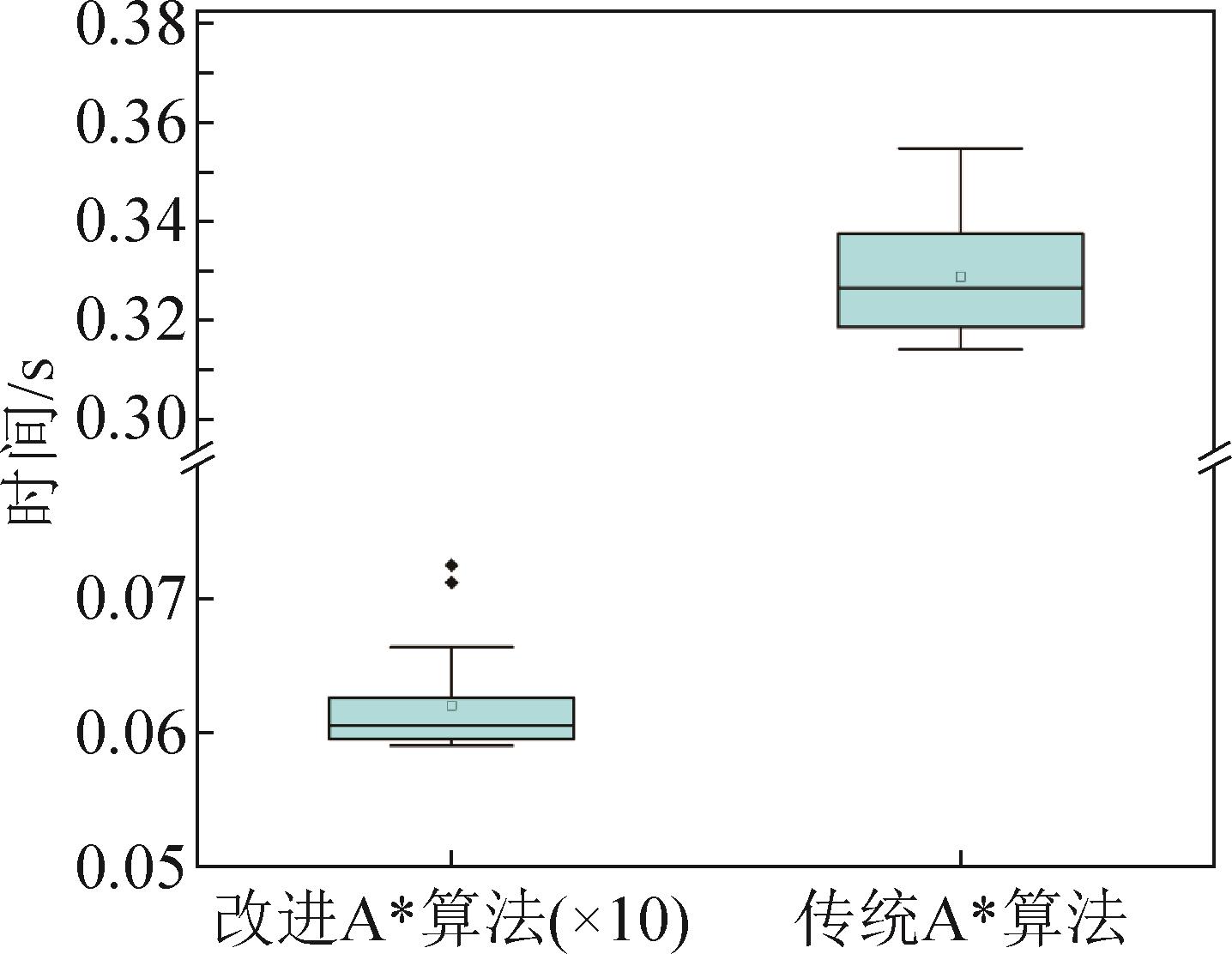
Fig. 17
Traditional algorithm
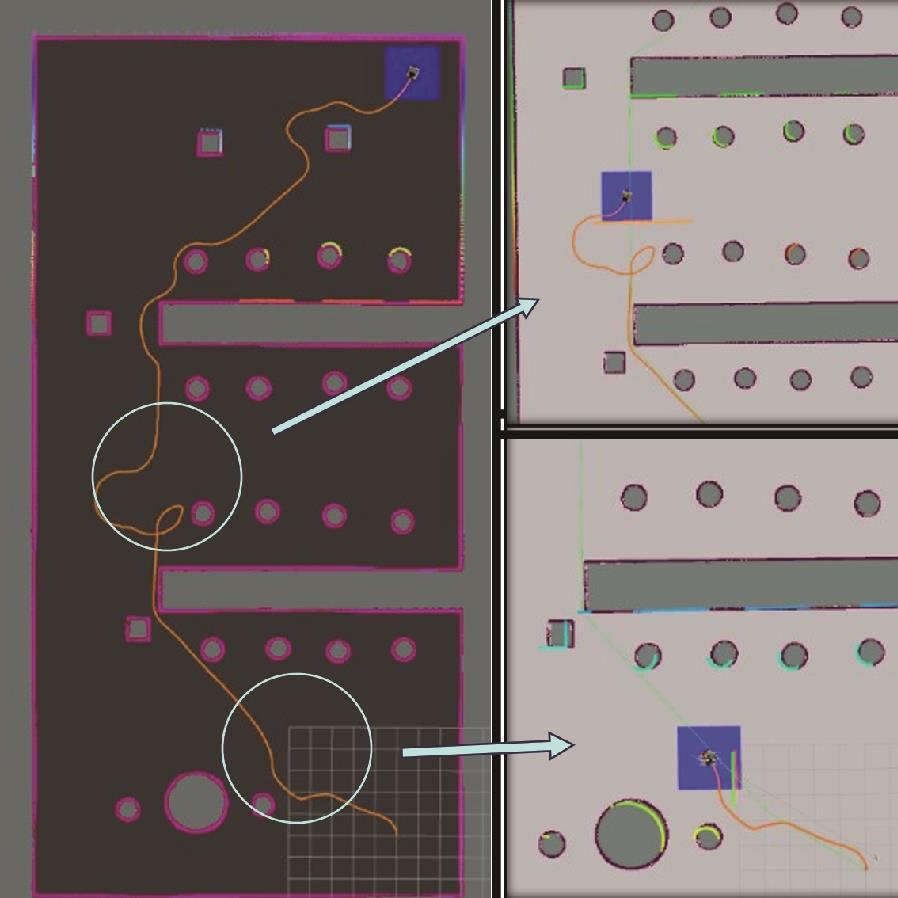

Fig. 18
Improved fusion algorithm
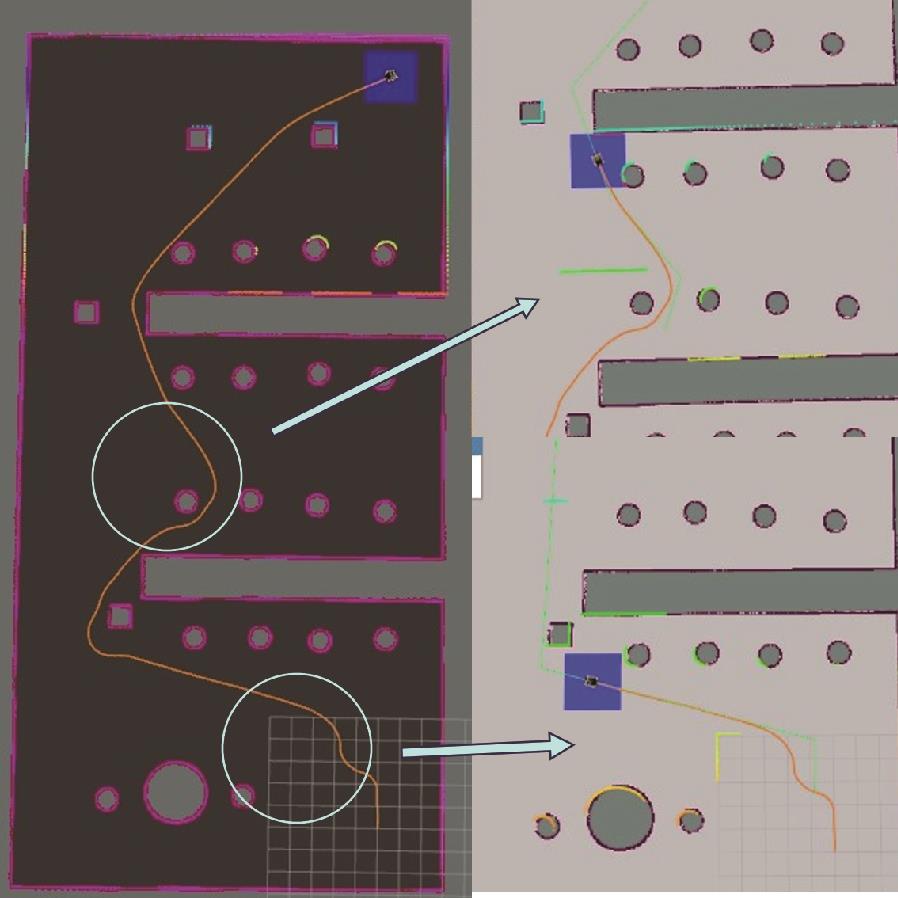
Fig. 19
Simulation scenario
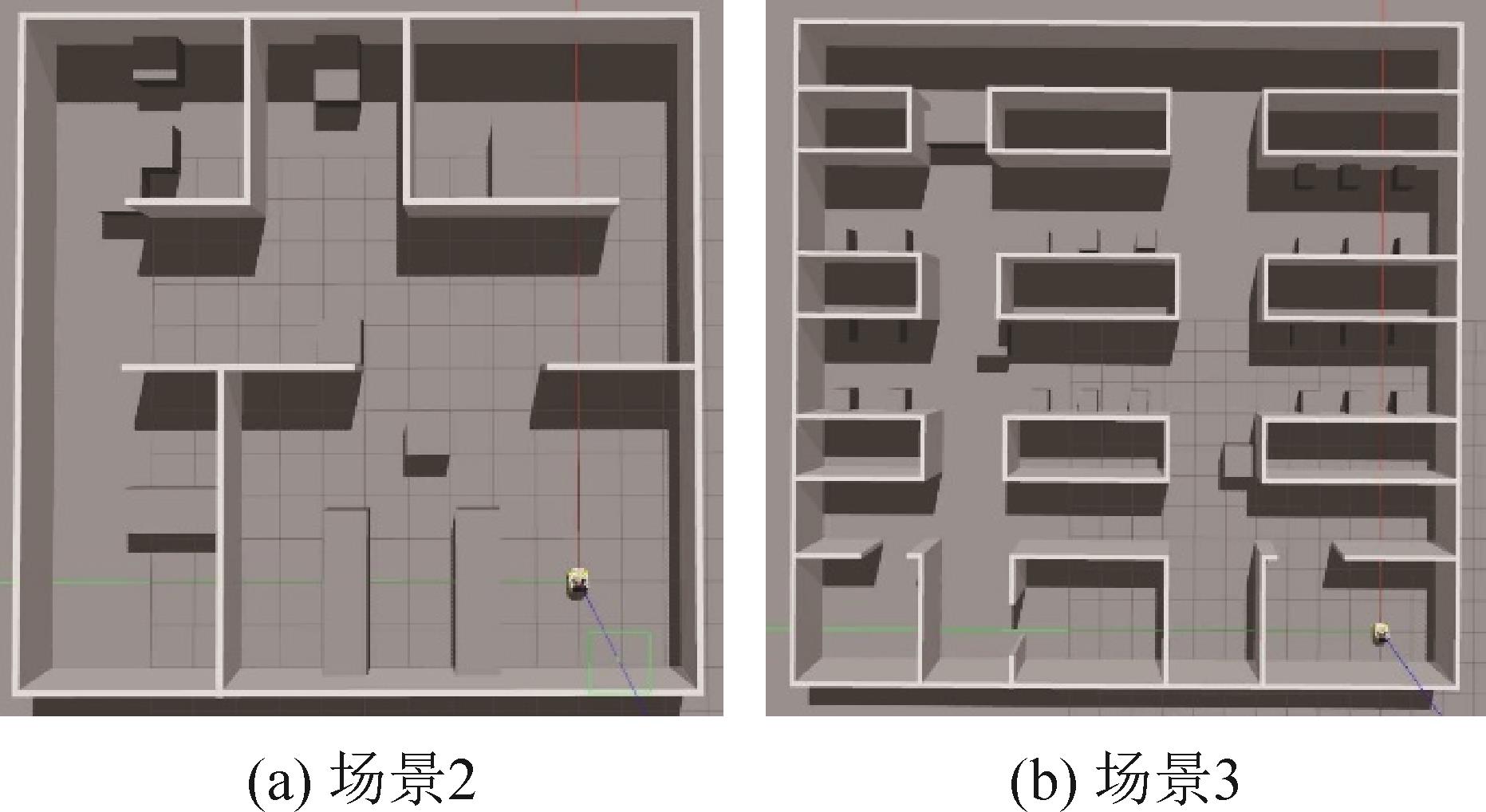

Fig. 20
Comparison of experimental results in simulation scenario 2
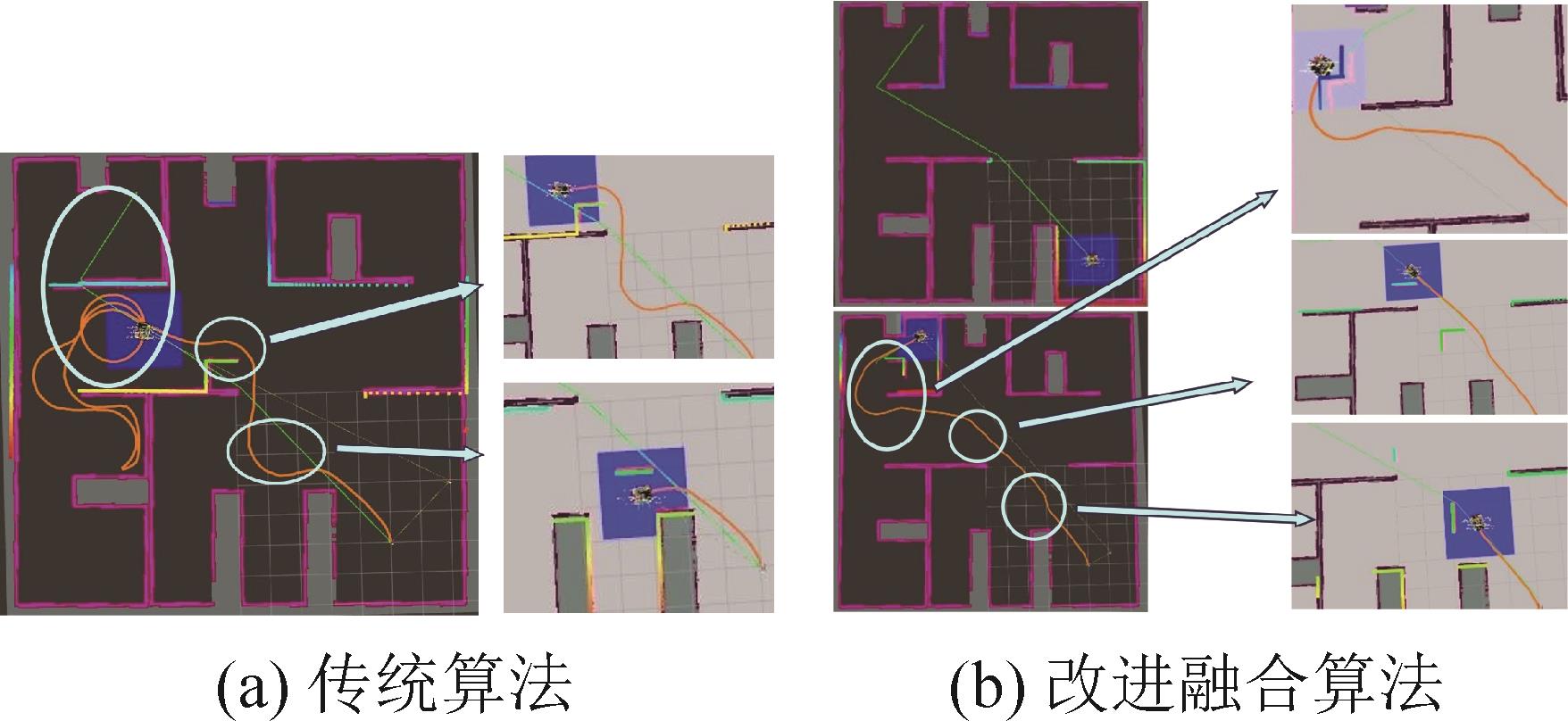
Fig. 21
Comparison of experimental results in simulation scenario 3
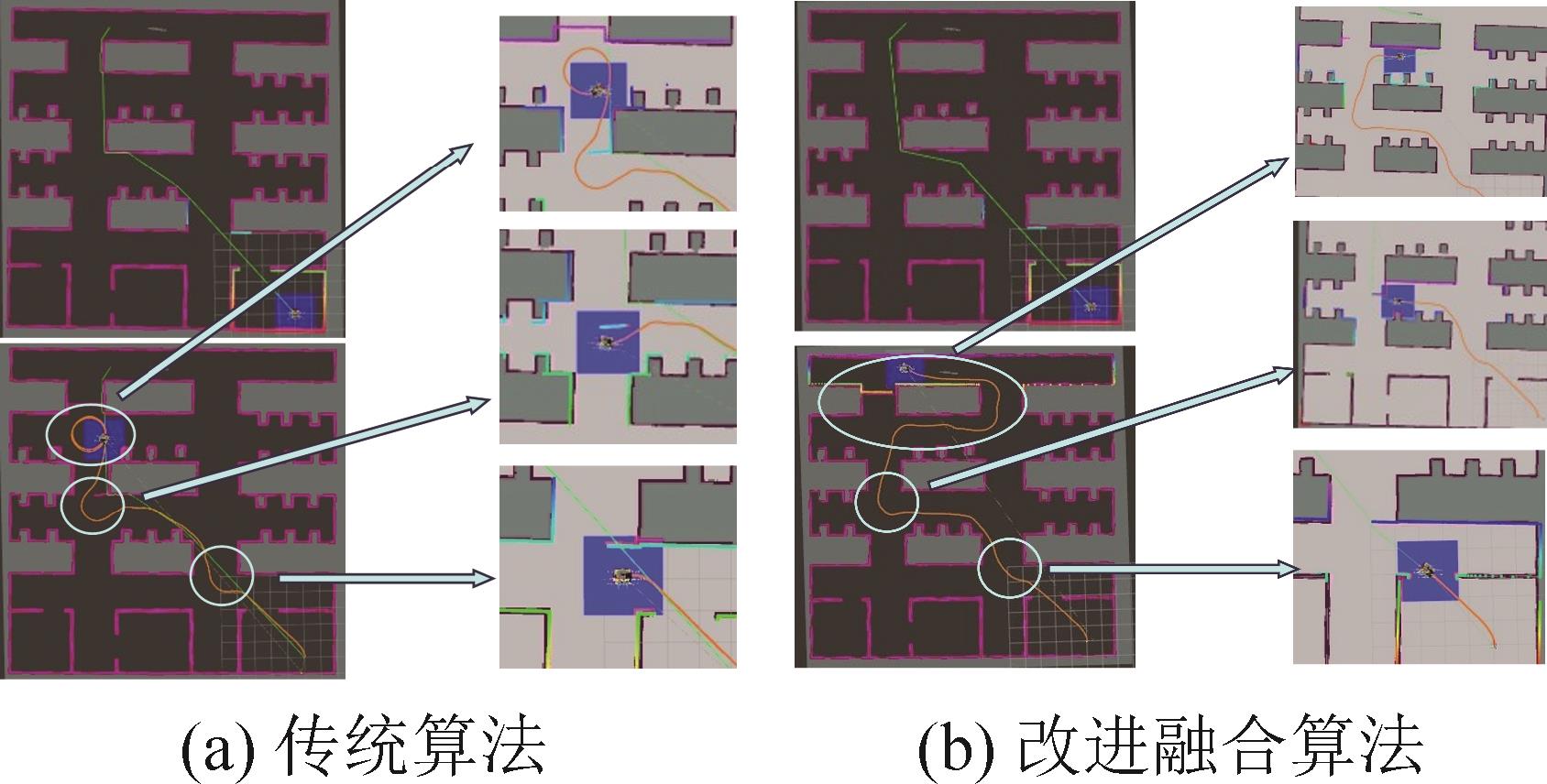
Fig. 22
Real vehicle experimental results (the following figure shows the improved algorithm)
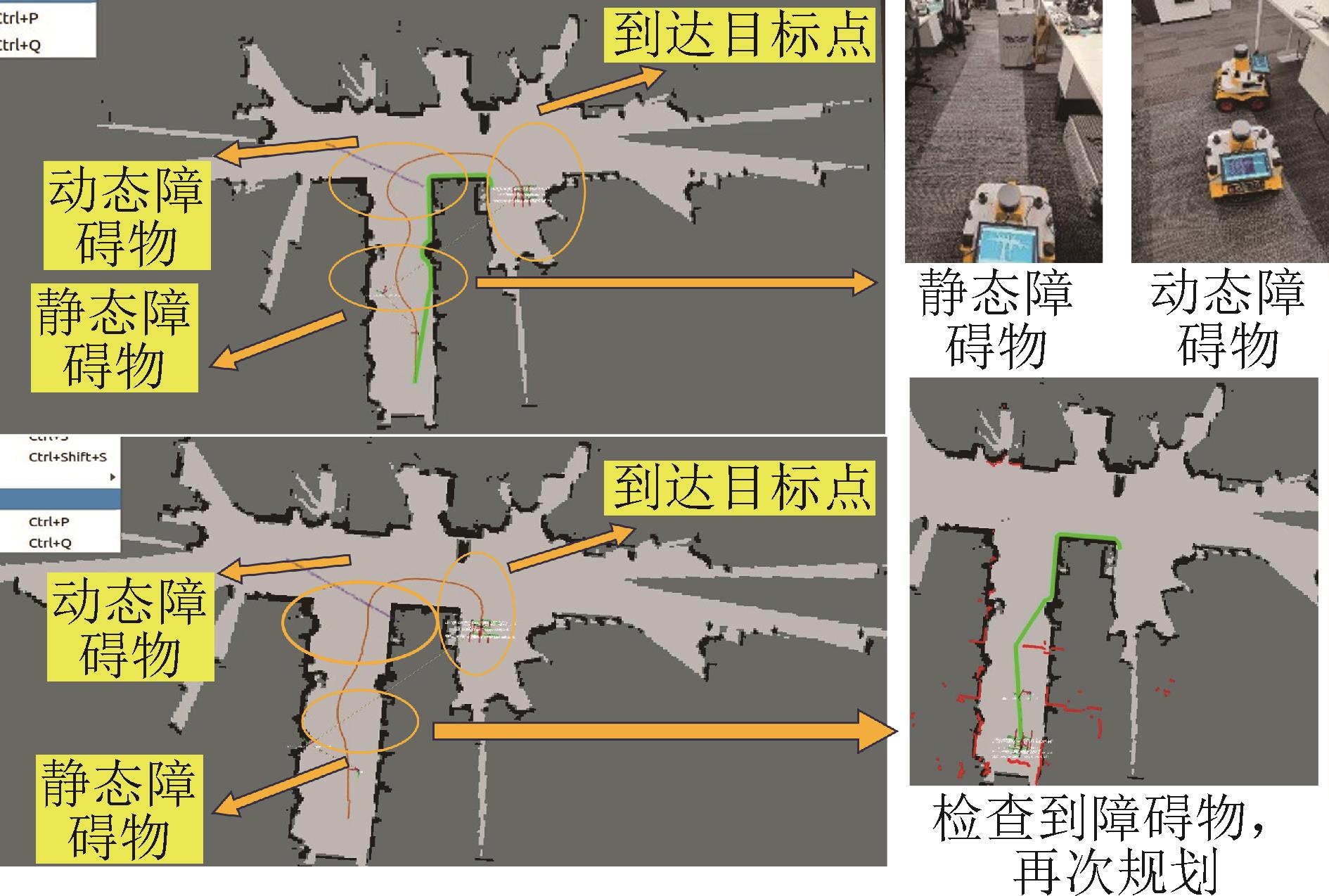
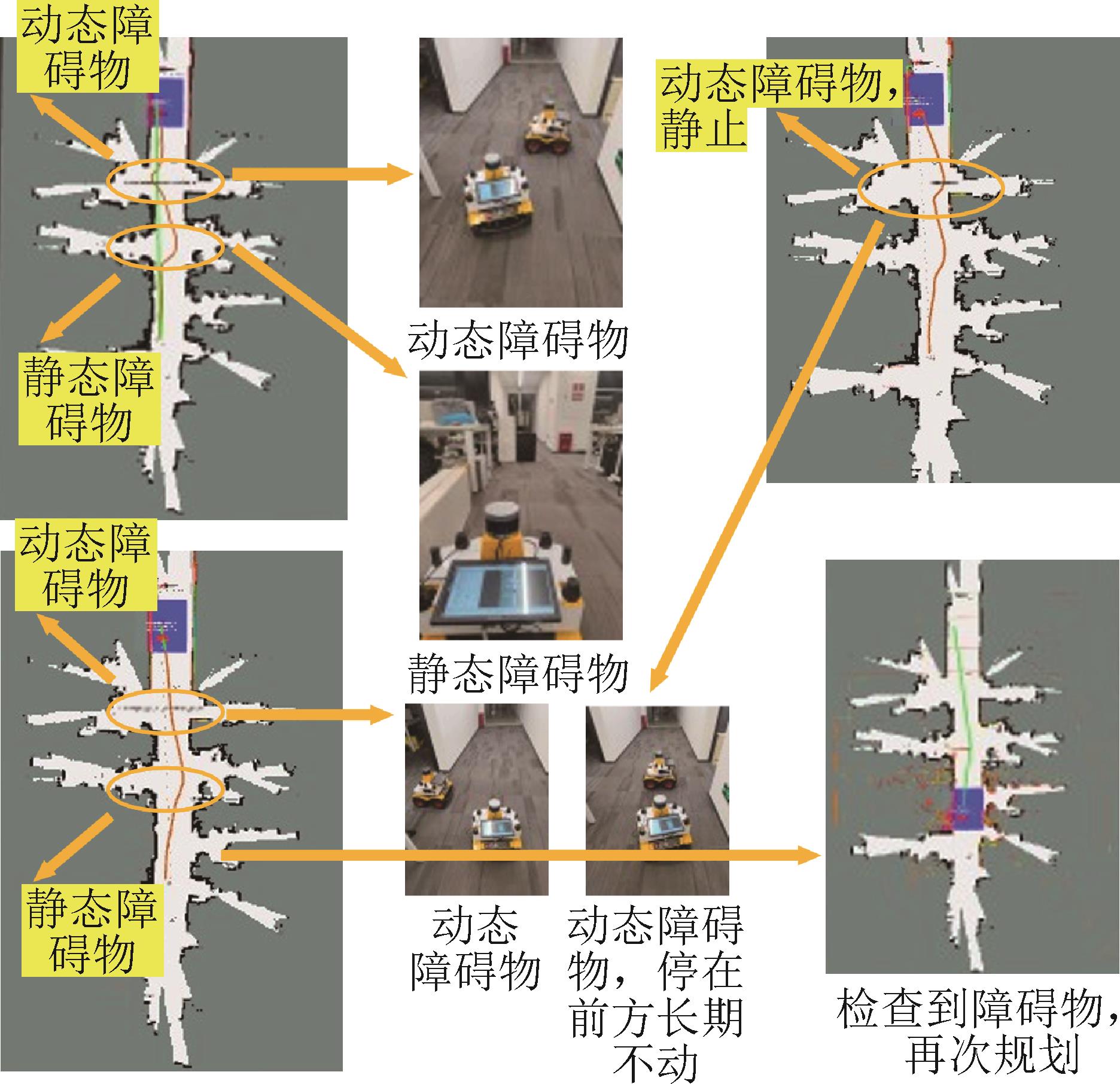
Fig. 23
Real vehicle experimental 2 results
| 1 | Liu Jianhua, Yang Jianguo, Liu Huaping, et al. An Improved Ant Colony Algorithm for Robot Path Planning[J]. Soft Computing, 2017, 21(19): 5829-5839. |
| 2 | 陈娇, 徐菱, 陈佳, 等. 改进A*和动态窗口法的移动机器人路径规划[J]. 计算机集成制造系统, 2022, 28(6): 1650-1658. |
| Chen Jiao, Xu Ling, Chen Jia, et al. Path Planning Based on Improved A* and Dynamic Window Approach for Mobile Robot[J]. Computer Integrated Manufacturing Systems, 2022, 28(6): 1650-1658. | |
| 3 | 鲍惠芳, 方杰, 张进思, 等. 基于改进蚁群算法的低碳冷链配送路径优化[J]. 系统仿真学报, 2024, 36(1): 183-194. |
| Bao Huifang, Fang Jie, Zhang Jinsi, et al. Optimization on Cold Chain Distribution Routes Considering Carbon Emissions Based on Improved Ant Colony Algorithm[J]. Journal of System Simulation, 2024, 36(1): 183-194. | |
| 4 | Orozco-Rosas Ulises, Montiel Oscar, Sepúlveda Roberto. Mobile Robot Path Planning Using Membrane Evolutionary Artificial Potential Field[J]. Applied Soft Computing, 2019, 77: 236-251. |
| 5 | Fu Bing, Chen Lin, Zhou Yuntao, et al. An Improved A* Algorithm for the Industrial Robot Path Planning with High Success Rate and Short Length[J]. Robotics and Autonomous Systems, 2018, 106: 26-37. |
| 6 | Ogata Kazuhiro. A Generic Approach on How to Formally Specify and Model Check Path Finding Algorithms: Dijkstra, A* and LPA* [J]. International Journal of Software Engineering and Knowledge Engineering, 2020, 30(10): 1481-1523. |
| 7 | 魏立新, 张钰锟, 孙浩, 等. 基于改进蚁群和DWA算法的机器人动态路径规划[J]. 控制与决策, 2022, 37(9): 2211-2216. |
| Wei Lixin, Zhang Yukun, Sun Hao, et al. Robot Dynamic Path Planning Based on Improved Ant Colony and DWA Algorithm[J]. Control and Decision, 2022, 37(9): 2211-2216. | |
| 8 | Cao Yan, Wei Wanyu, Bai Yu, et al. Multi-base Multi-UAV Cooperative Reconnaissance Path Planning with Genetic Algorithm[J]. Cluster Computing, 2019, 22(S3): 5175-5184. |
| 9 | Sun Changyin, He Wei, Hong Jie. Neural Network Control of a Flexible Robotic Manipulator Using the Lumped Spring-mass Model[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(8): 1863-1874. |
| 10 | Min Haitao, Xiong Xiaoyong, Wang Pengyu, et al. Autonomous Driving Path Planning Algorithm Based on Improved A* Algorithm in Unstructured Environment[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(2/3): 513-526. |
| 11 | 张丹红, 陈文文, 张华军, 等. A*算法与蚁群算法相结合的无人艇巡逻路径规划[J]. 华中科技大学学报(自然科学版), 2020, 48(6): 13-18. |
| Zhang Danhong, Chen Wenwen, Zhang Huajun, et al. Patrol Path Planning of Unmanned Surface Vehicle Based on A* Algorithm and Ant Colony Algorithm[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2020, 48(6): 13-18. | |
| 12 | Hong Zhonghua, Sun Pengfei, Tong Xiaohua, et al. Improved A-star Algorithm for Long-distance Off-road Path Planning Using Terrain Data Map[J]. ISPRS International Journal of Geo-Information, 2021, 10(11): 785. |
| 13 | 迟旭, 李花, 费继友. 基于改进A*算法与动态窗口法融合的机器人随机避障方法研究[J]. 仪器仪表学报, 2021, 42(3): 132-140. |
| Chi Xu, Li Hua, Fei Jiyou. Research on Robot Random Obstacle Avoidance Method Based on Fusion of Improved A* Algorithm and Dynamic Window Method[J]. Chinese Journal of Scientific Instrument, 2021, 42(3): 132-140. | |
| 14 | Kyu Kang Nam, Ho Joon Son, Hong Lee Soo. Modified A-star Algorithm for Modular Plant Land Transportation[J]. Journal of Mechanical Science and Technology, 2018, 32(12): 5563-5571. |
| 15 | Wang Xingdong, Zhang Haowei, Liu Shuo, et al. Path Planning of Scenic Spots Based on Improved A* Algorithm[J]. Scientific Reports, 2022, 12(1): 1320. |
| 16 | 王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353. |
| Wang Hongbin, Yin Pengheng, Zheng Wei, et al. Mobile Robot Path Planning Based on Improved A* Algorithm and Dynamic Window Method[J]. Robot, 2020, 42(3): 346-353. | |
| 17 | Li Xiuyun, Liu Fei, Liu Juan, et al. Obstacle Avoidance for Mobile Robot Based on Improved Dynamic Window Approach[J]. Turkish Journal of Electrical Engineering and Computer Sciences, 2017, 25(2): 666-676. |
| 18 | 王彬, 聂建军, 李海洋, 等. 优化A*与动态窗口法的移动机器人路径规划[J]. 计算机集成制造系统, 2024, 30(4): 1353-1363. |
| Wang Bin, Nie Jianjun, Li Haiyang, et al. Mobile Robot Path Planning Based on Optimized A* and Dynamic Window Approach[J]. Computer Integrated Manufacturing Systems, 2024, 30(4): 1353-1363. | |
| 19 | 康文雄, 许耀钊. 节点约束型最短路径的分层Dijkstra算法[J]. 华南理工大学学报(自然科学版), 2017, 45(1): 66-73. |
| Kang Wenxiong, Xu Yaozhao. A Hierarchical Dijkstra Algorithm for Solving Shortest Path from Constrained Nodes[J]. Journal of South China University of Technology(Natural Science Edition), 2017, 45(1): 66-73. | |
| 20 | 柴红杰, 李建军, 姚明. 改进的A*算法移动机器人路径规划[J]. 电子器件, 2021, 44(2): 362-367. |
| Chai Hongjie, Li Jianjun, Yao Ming. Improved A* Algorithm for Path Planning of Mobile Robot[J]. Chinese Journal of Electron Devices, 2021, 44(2): 362-367. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Fang Haojie, Zhen Ziyang, Gong Huajun, Xie Xu, Luo Wei. Task Planning Method for Cross-domain Cooperative Combat Operations of Unmanned Systems Under Complex Constraints [J]. Journal of System Simulation, 2026, 38(3): 785-799. |
| [5] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [6] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [7] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [8] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [9] | Zou Jing, Tan Xu, Mao Junji, Gao Haidong, Tan Jianrong. Defect Detection Method Based on Hierarchical Microscopic Feature Modeling and Simulation [J]. Journal of System Simulation, 2026, 38(1): 1-13. |
| [10] | Qu Jing, Fang Kaining, Zhu Shantong, Bu Lingguo. Virtual Reality Rehabilitation Training System Based on Multimodal Brain-computer Interface [J]. Journal of System Simulation, 2026, 38(1): 125-135. |
| [11] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [12] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [13] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [14] | Xie Xu, Ma Yuqing. Dynamic Data Driven Simulation Based on Macro-microscopic Hierarchical Simulation Models [J]. Journal of System Simulation, 2025, 37(7): 1848-1864. |
| [15] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
