

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (2): 497-510.doi: 10.16182/j.issn1004731x.joss.23-0103
• Papers • Previous Articles Next Articles
Zhang Guohui1( ), Zhang Ya'nan1(), Gao Ang2, Xu Aoyu3
), Zhang Ya'nan1(), Gao Ang2, Xu Aoyu3
Received:2023-02-08
Revised:2023-04-07
Online:2024-02-15
Published:2024-02-04
Contact:
Zhang Ya'nan
E-mail:zgh8002@126.com;546018140@qq.com
CLC Number:
Zhang Guohui, Zhang Ya'nan, Gao Ang, Xu Aoyu. Reconnaissance Mission Planning Method for Air-ground Heterogeneous Unmanned Systems[J]. Journal of System Simulation, 2024, 36(2): 497-510.

Fig. 1
Extension point selection
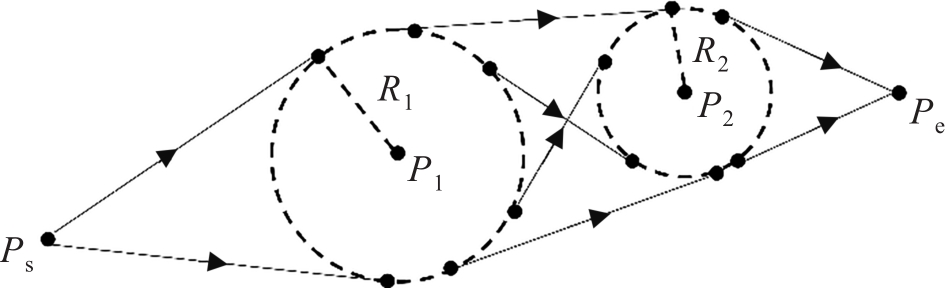
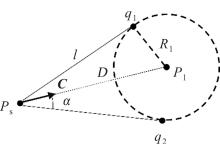
Fig. 2
Path point to threat area
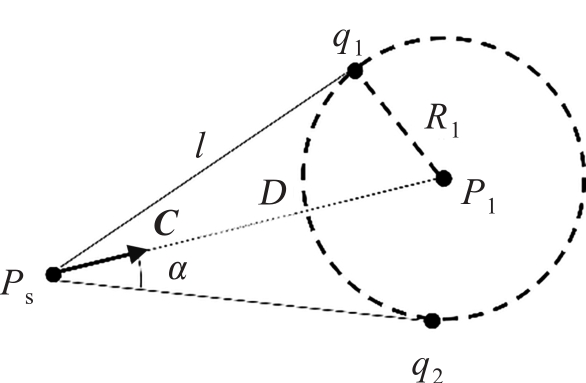
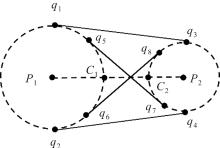
Fig. 3
Common tangent of two threat areas
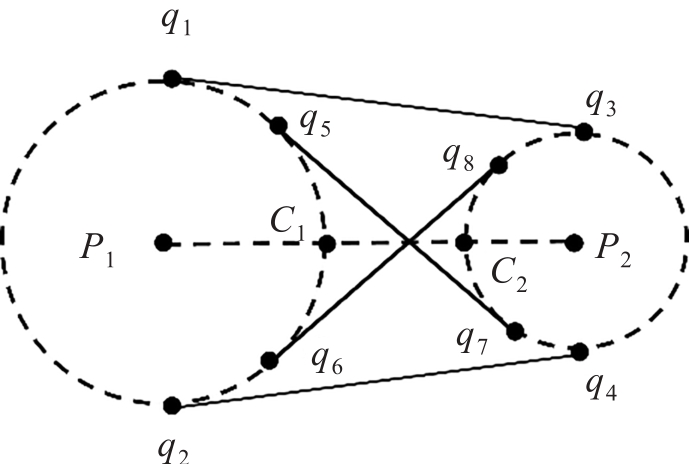
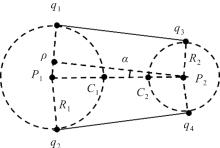
Fig. 4
Tangent points outside threat area
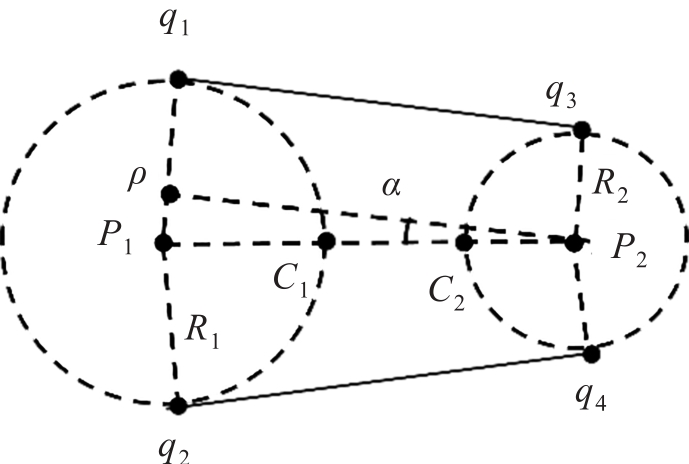

Fig. 5
Tangent points inside threat area
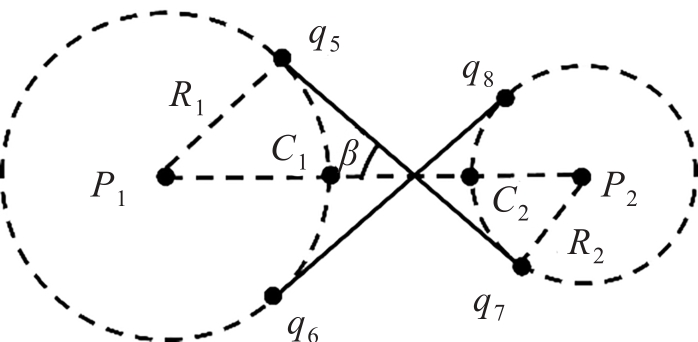

Fig. 6
Next step path selection
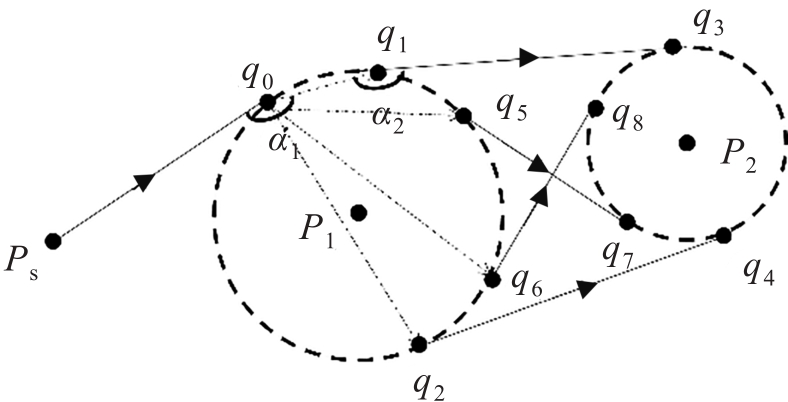
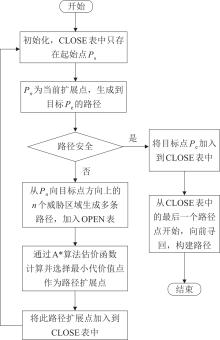
Fig. 7
Flow chart of UAV A* path search algorithm

Fig. 8
Unmanned vehicle path search environment
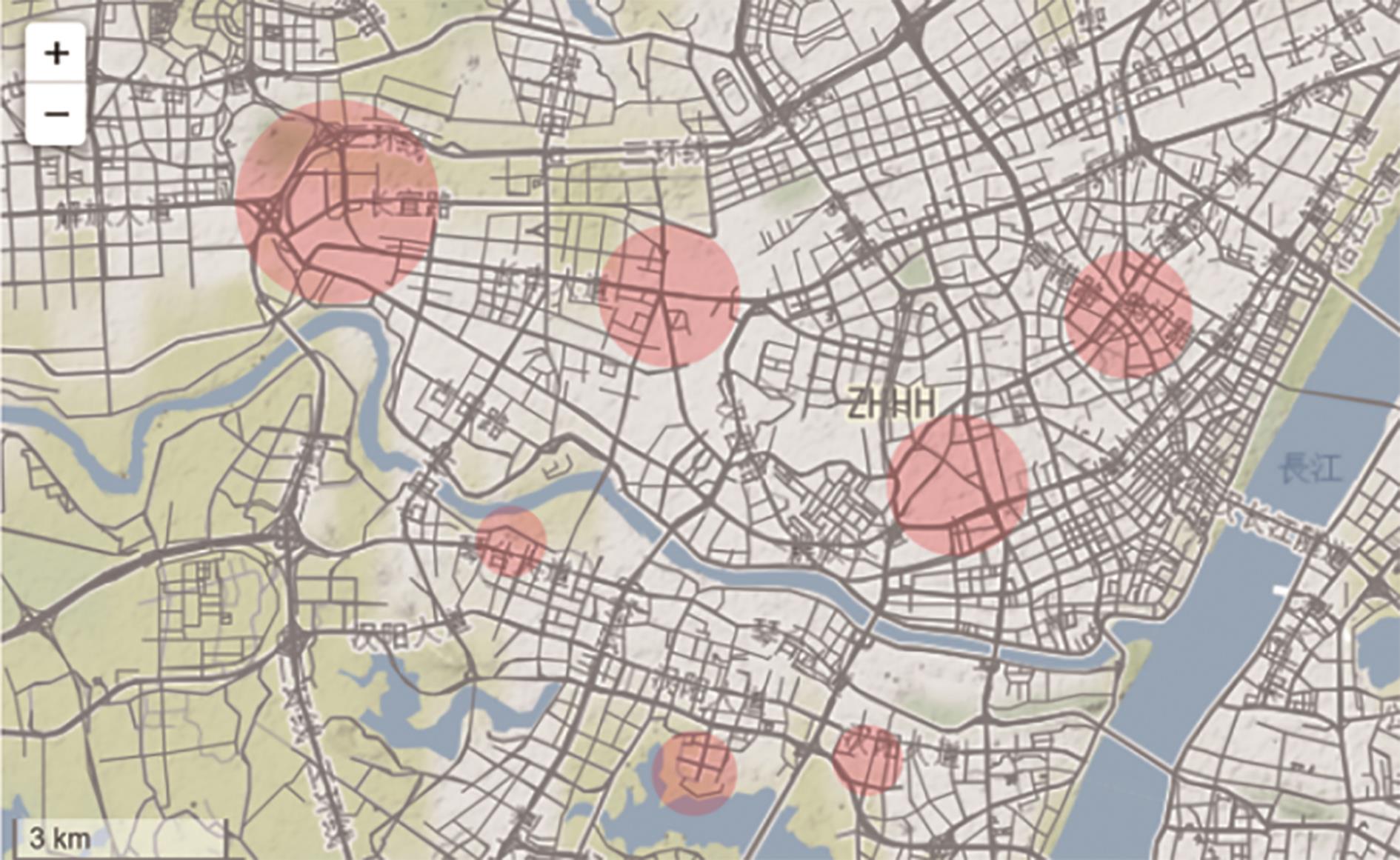
Table 1
Task sequence coding example
| 目标 | X | [X] | {X} | 平台 | 收益 |
|---|---|---|---|---|---|
| O1 | 3.7 | 3 | 0.7 | S3 | 40 |
| O2 | 1.2 | 1 | 0.2 | S1 | 70 |
| O3 | 3.5 | 3 | 0.5 | S3 | 30 |
| O4 | 2.3 | 2 | 0.3 | S2 | 60 |
| O5 | 1.5 | 1 | 0.5 | S1 | 10 |
Table 2
Unmanned platform task sequence
| 无人平台 | 任务序列 |
|---|---|
| S1 | |
| S2 | |
| S3 |

Fig. 9
A sample of crossover operation
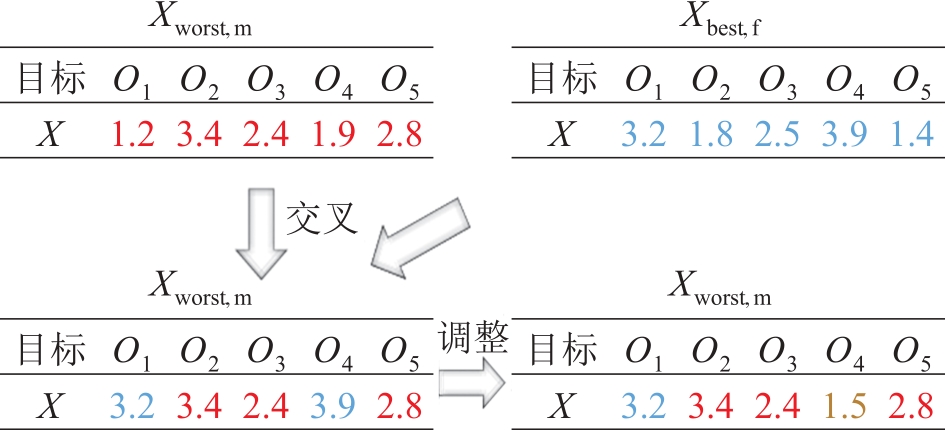
Fig. 10
Flow chart of IMSO
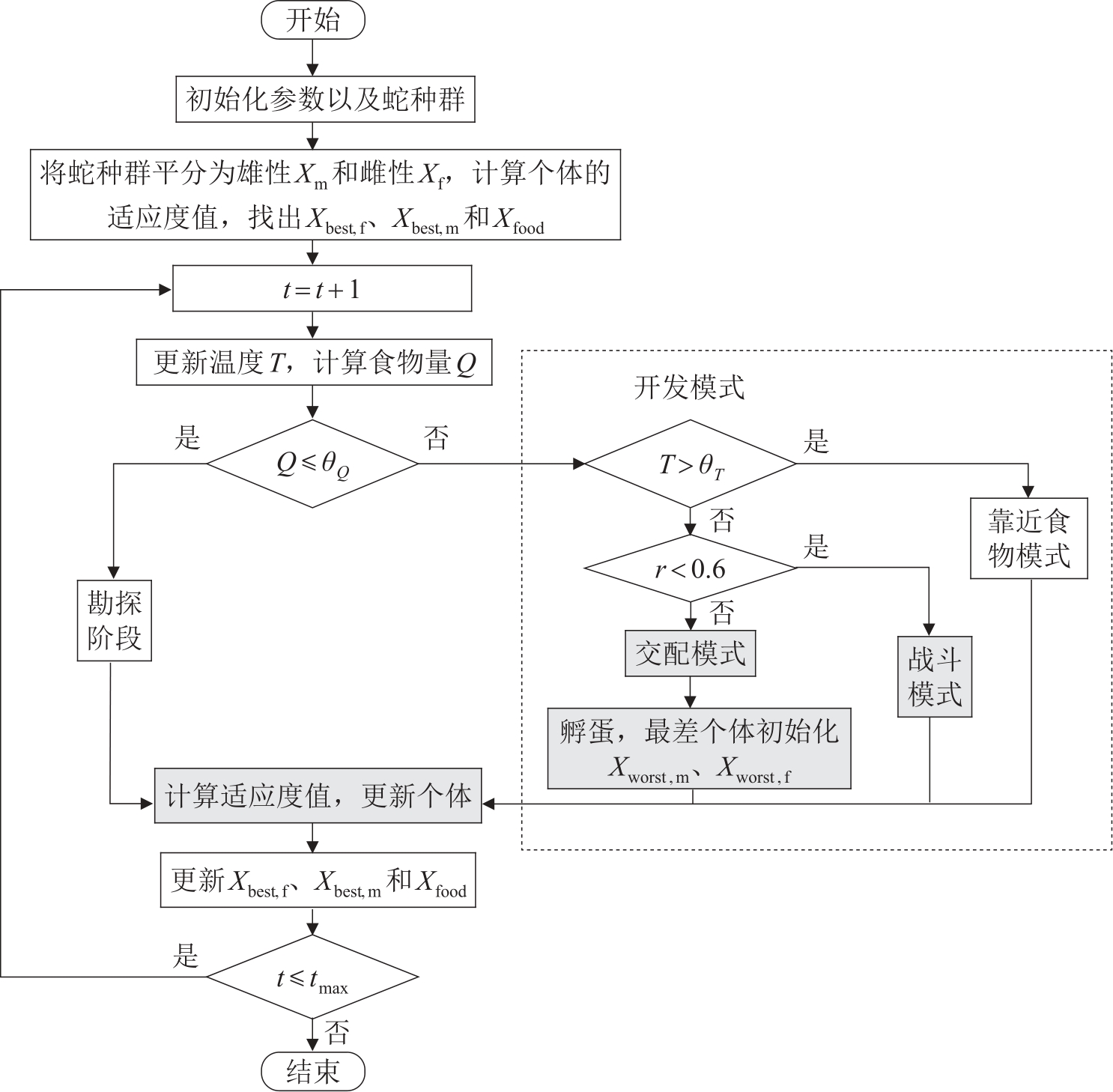
Table 3
Target property sheet
| 目标 | 经度 | 纬度 | 对空威胁系数 | 对空威胁距离/m | 对地威胁系数 | 对地威胁距离/m | 价值 |
|---|---|---|---|---|---|---|---|
| O1 | 114.331 3 | 30.533 1 | 0.8 | 2 000 | 0.2 | 1 000 | 100 |
| O2 | 114.243 4 | 30.551 1 | 0.2 | 1 500 | 0.3 | 500 | 60 |
| O3 | 114.214 6 | 30.609 0 | 0.1 | 1 500 | 0.4 | 1 000 | 40 |
| O4 | 114.307 3 | 30.654 5 | 0.5 | 3 000 | 0.2 | 800 | 80 |
| O5 | 114.360 8 | 30.590 1 | 0.3 | 3 000 | 0.1 | 600 | 30 |
| O6 | 114.414 4 | 30.543 4 | 0.9 | 2 000 | 0.2 | 400 | 60 |
| O7 | 114.237 0 | 30.521 9 | 0.3 | 2 700 | 0.7 | 500 | 70 |
| O8 | 114.290 8 | 30.502 0 | 0.1 | 1 000 | 0.8 | 400 | 40 |
| O9 | 114.281 2 | 30.606 7 | 0.8 | 1 200 | 0.2 | 900 | 50 |
| O10 | 114.191 7 | 30.578 4 | 0.4 | 2 700 | 0.1 | 500 | 30 |
| O11 | 114.166 5 | 30.620 8 | 0.6 | 1 800 | 0.4 | 1 400 | 40 |
| O12 | 114.393 4 | 30.643 2 | 0.8 | 2 700 | 0.6 | 600 | 30 |
| O13 | 114.218 2 | 30.549 4 | 0.2 | 1 200 | 0.7 | 600 | 50 |
| O14 | 114.256 4 | 30.585 4 | 0.2 | 2 000 | 0.7 | 1 000 | 100 |

Fig. 11
UAV path search
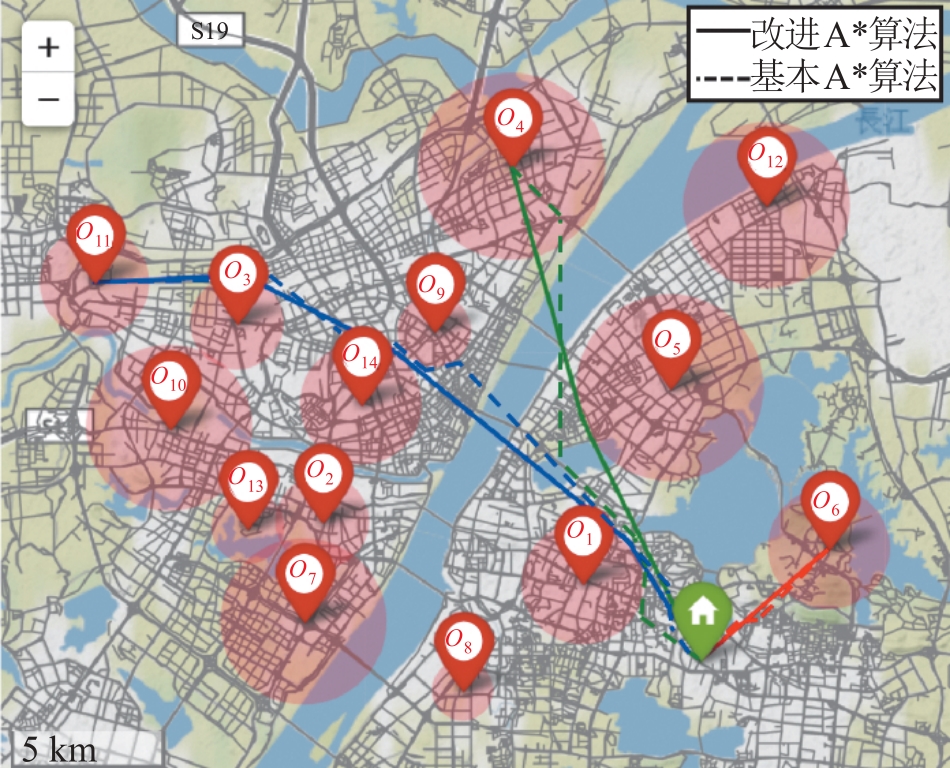

Fig. 12
UGV path search
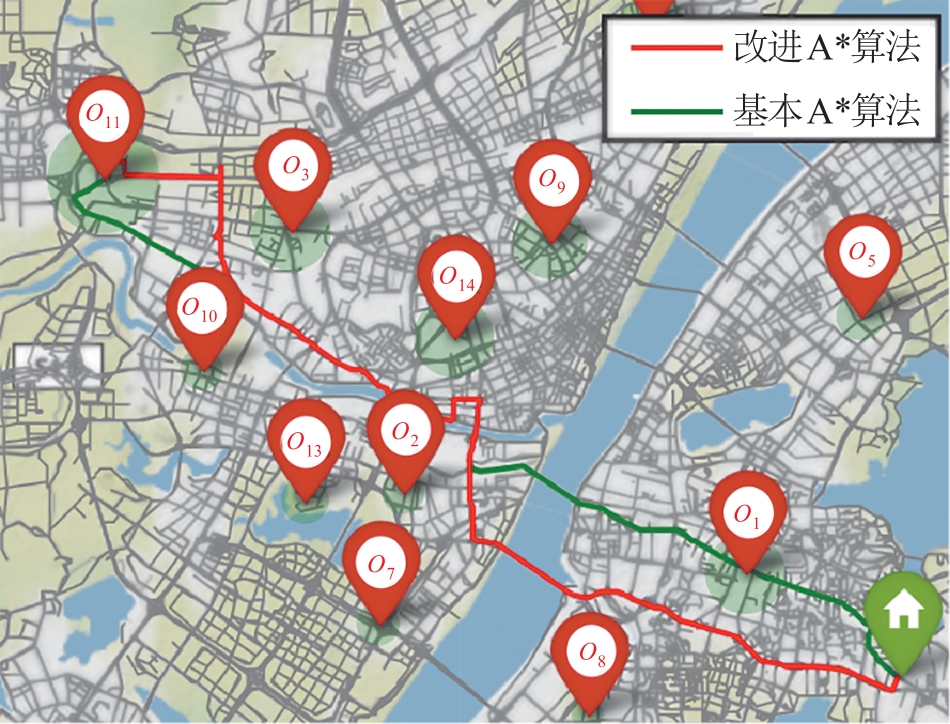
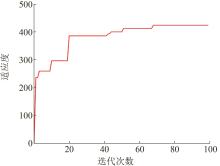
Fig. 13
IMSO algorithm fitness curve
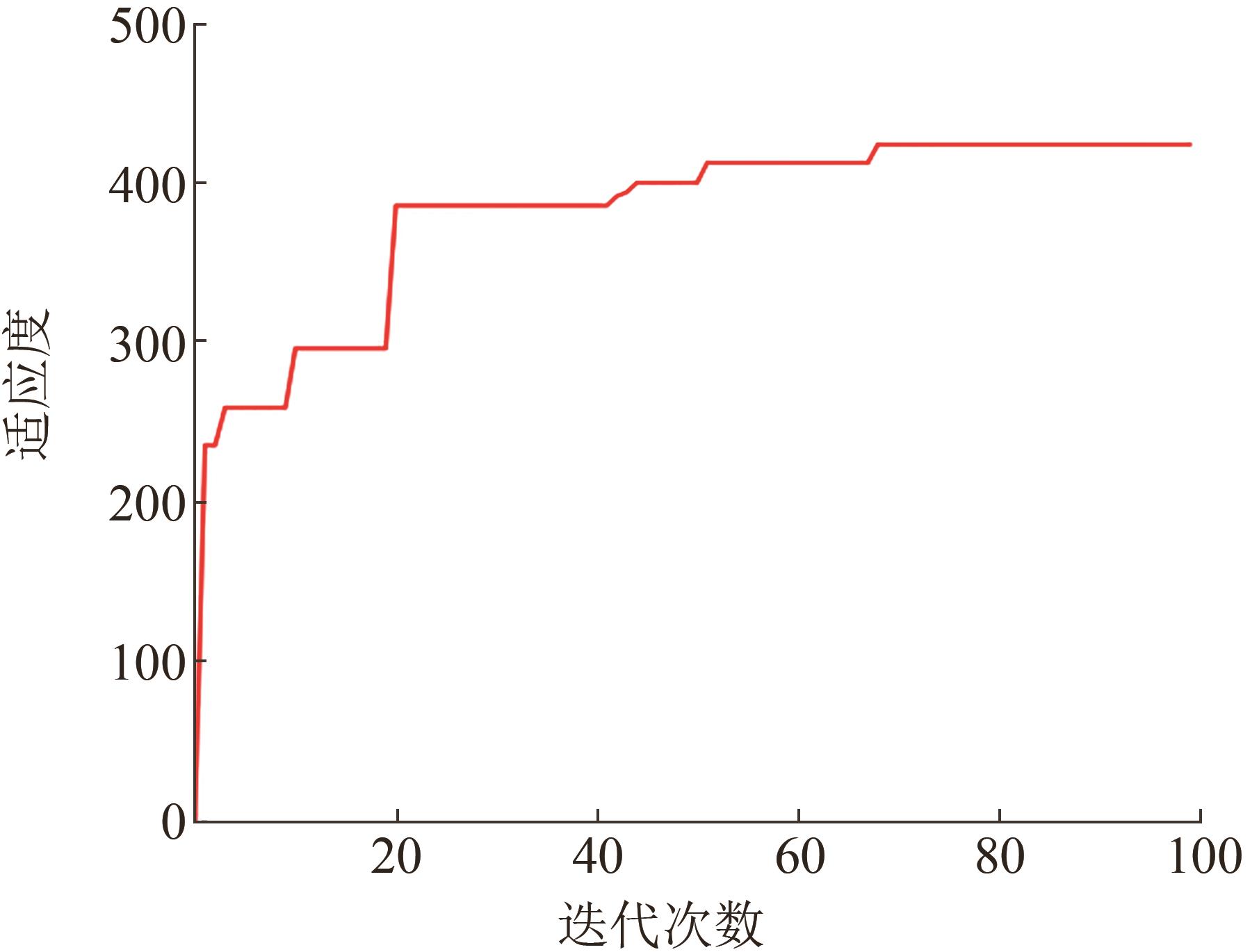
Table 4
Unmanned platform allocation information
| 无人平台 | 类型 | 目标序列 | 航程/m |
|---|---|---|---|
| S1 | UAV | O7 | 25 858 |
| S2 | UAV | 28 085 | |
| S3 | UAV | 36 691 | |
| S4 | UAV | 38 845 | |
| S5 | UGV | 56 622 | |
| S6 | UGV | 63 318 | |
| S7 | UGV | 62 493 |
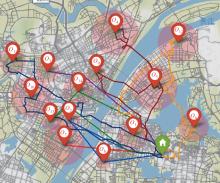
Fig. 14
Task assignment diagram
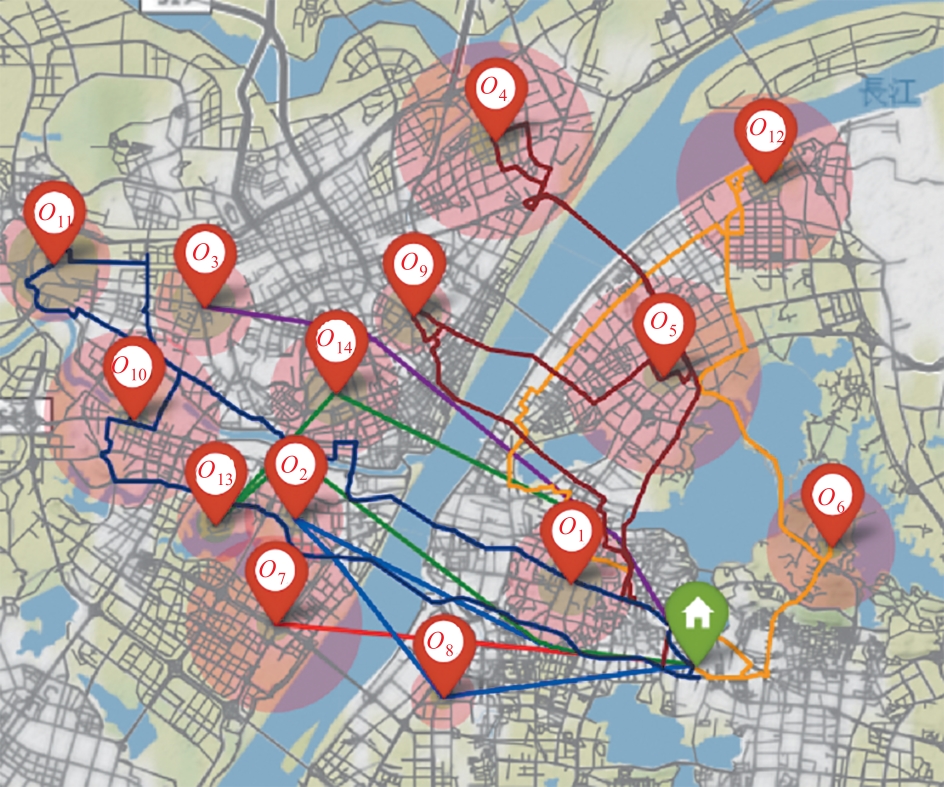
Table 5
Performance comparison of 3 algorithms under 3 settings
| 参数 | NU =3, NG =3, NO =9 | NU =4, NG =3, NO =14 | NU =5, NG =4, NO =14 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| IMSO | SO | PSO | IMSO | SO | PSO | IMSO | SO | PSO | |
| 最优值 | 314.13 | 314.13 | 314.13 | 429.22 | 411.87 | 393.51 | 440.99 | 422.95 | 412.74 |
| 平均值 | 314.04 | 313.68 | 304.17 | 416.15 | 381.81 | 354.07 | 430.94 | 391.70 | 368.67 |
| 最差值 | 313.71 | 311.90 | 279.37 | 400.22 | 352.83 | 312.74 | 418.89 | 349.29 | 286.13 |
| 标准差 | 0.140 6 | 0.661 2 | 14.655 1 | 9.906 3 | 19.826 4 | 28.352 8 | 5.929 6 | 21.478 2 | 38.464 7 |
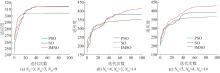
Fig. 15
Fitness curve of 3 algorithms under 3 settings
| 1 | 谭威, 胡永江, 李文广, 等. 多无人机协同任务规划研究综述[J]. 微型电脑应用, 2021, 37(9): 189-192. |
| Tan Wei, Hu Yongjiang, Li Wenguang, et al. A Survey of Multi-UAV Cooperative Mission Planning[J]. Microcomputer Applications, 2021, 37(9): 189-192. | |
| 2 | 武文亮, 周兴社, 沈博, 等. 集群机器人系统特性评价研究综述[J]. 自动化学报, 2022, 48(5): 1153-1172. |
| Wu Wenliang, Zhou Xingshe, Shen Bo, et al. A Review of Swarm Robotic Systems Property Evaluation Research[J]. Acta Automatica Sinica, 2022, 48(5): 1153-1172. | |
| 3 | 马悦, 吴琳, 郭圣明. 作战任务分配建模及求解方法研究[J]. 系统仿真学报, 2023, 35(4): 887-898. |
| Ma Yue, Wu Lin, Guo Shengming. Research on Modeling and Solution Method of Operational Tasks Assignment[J]. Journal of System Simulation, 2023, 35(4): 887-898. | |
| 4 | 赵越. 多无人机协同任务分配和航路规划技术研究[D]. 成都: 电子科技大学, 2022. |
| Zhao Yue. Research on Multi-UAV Cooperative Task Allocation and Route Planning Technology[D]. Chengdu: University of Electronic Science and Technology of China, 2022. | |
| 5 | Deng Qibo, Yu Jianqiao, Wang Ningfei. Cooperative Task Assignment of Multiple Heterogeneous Unmanned Aerial Vehicles Using a Modified Genetic Algorithm with Multi-type Genes[J]. Chinese Journal of Aeronautics, 2013, 26(5): 1238-1250. |
| 6 | 马硕, 马亚平. 异构无人系统群协同作战任务规划方法[J]. 指挥控制与仿真, 2019, 41(2): 24-30. |
| Ma Shuo, Ma Yaping. Heterogeneous Cooperative Unmanned System Mission Planning Method[J]. Command Control & Simulation, 2019, 41(2): 24-30. | |
| 7 | Ye Fang, Chen Jie, Tian Yuan, et al. Cooperative Multiple Task Assignment of Heterogeneous UAVs Using a Modified Genetic Algorithm with Multi-type-gene Chromosome Encoding Strategy[J]. Journal of Intelligent & Robotic Systems, 2020, 100(2): 615-627. |
| 8 | 范博洋, 赵高鹏, 薄煜明, 等. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575. |
| Fan Boyang, Zhao Gaopeng, Bo Yuming, et al. Collaborative Task Allocation Method for Multi-target Air-ground Heterogeneous Unmanned System[J]. Acta Armamentarii, 2023, 44(6): 1564-1575. | |
| 9 | Wang Jianfeng, Jia Gaowei, Lin Juncan, et al. Cooperative Task Allocation for Heterogeneous multi-UAV Using Multi-objective Optimization Algorithm[J]. Journal of Central South University, 2020, 27(2): 432-448. |
| 10 | Tan Guoge, Zhuang Jiayuan, Zou Jin, et al. Multi-type Task Allocation for Multiple Heterogeneous Unmanned Surface Vehicles (USVs) Based on the Self-organizing Map[J]. Applied Ocean Research, 2022, 126: 103262. |
| 11 | Chen Lizhi, Liu Weili, Zhong Jinghui. An Efficient Multi-objective Ant Colony Optimization for Task Allocation of Heterogeneous Unmanned Aerial Vehicles[J]. Journal of Computational Science, 2022, 58: 101545. |
| 12 | Kool Wouter, van Hoof Herke, Welling Max. Attention, Learn to Solve Routing Problems![EB/OL]. (2019-02-07) [2022-04-04]. . |
| 13 | 周灵叶. 基于任务的无人机协同路径规划方法设计与实现[D]. 北京: 北京邮电大学, 2021. |
| Zhou Lingye. Sesign and Implementation of Task-based UAV Cooperative Path Planning Method[D]. Beijing: Beijing University of Posts and Telecommunications, 2021. | |
| 14 | 朱云虹, 袁一. 基于改进A*算法的最优路径搜索[J]. 计算机技术与发展, 2018, 28(4): 55-59. |
| Zhu Yunhong, Yuan Yi. Optimal Path Search Based on Improved A* Algorithm[J]. Computer Technology and Development, 2018, 28(4): 55-59. | |
| 15 | Hashim Fatma A, Hussien Abdelazim G. Snake Optimizer: A Novel Meta-heuristic Optimization Algorithm[J]. Knowledge-based Systems, 2022, 242: 108320. |
| [1] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [2] | Tian Ao, Zhang Jianqin, Wen Zheng, Hu Chaonan, Zhao Hong, Shen bo. Agent-based Pathfinding Method for Indoor Fire Emergency Evacuation [J]. Journal of System Simulation, 2026, 38(2): 532-543. |
| [3] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [4] | Li Xiutian, Wang Ling, Chen Yingwu, Xing Lining, Chen Yingguo. Multi-scenario Multi-satellite Mission Planning Method Based on Adaptive Large Neighborhood Search [J]. Journal of System Simulation, 2025, 37(7): 1836-1847. |
| [5] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [6] | Lin Guijuan, Li Zihan, Wang Yu. Research on Improved A* Algorithm Path Planning Based on Global Key Point Extraction [J]. Journal of System Simulation, 2025, 37(3): 667-678. |
| [7] | Li Jiongyi, Li Qiang, Zhang Xinwen, Htet Zin Myo, Cai Yongbin. Improved Bidirectional A* Quadratic Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2025, 37(2): 498-507. |
| [8] | Xing Lijing, Li Min, Zeng Xiangguang, Zhang Ping, Peng Bei. AUV Path Planning Based on Behavior Cloning and Improved DQN in Partially Unknown Environments [J]. Journal of System Simulation, 2025, 37(11): 2754-2767. |
| [9] | Yang Lanying, Li Chao, Zou Haifeng, Wan Jiangtao, Zhang Renqiang, Liu Hui, Lu Hong. Robot Path Planning Optimization Based on Fusion of Improved Ant Colony Algorithm and A* Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2956-2965. |
| [10] | Xu Jianmin, Song Lei, Deng Dongdong, Chen Yaoruo, Yang Wei. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized DWA Algorithm [J]. Journal of System Simulation, 2025, 37(1): 257-270. |
| [11] | Ji Peng, Zhang Xinyuan, Gao Shuaixuan, Wei Shuorang. Path Planning Based on Improved A* and Dynamic Window Approach [J]. Journal of System Simulation, 2024, 36(9): 2171-2180. |
| [12] | Lai Rongshen, Dou Lei, Wu Zhiyong, Sun Shuai. Fusion of Improved A* and Dynamic Window Approach for Mobile Robot Path Planning [J]. Journal of System Simulation, 2024, 36(8): 1884-1894. |
| [13] | Yu Xiang, Deng Qianrui, Duan Sirui, Jiang Chen. A Multi-UAV Collaborative Priority Coverage Search Algorithm [J]. Journal of System Simulation, 2024, 36(4): 991-1000. |
| [14] | Yu Xiang, Jiang Chen, Duan Sirui, Deng Qianrui. Path Planning for Improvement of A* Algorithm and Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(3): 782-794. |
| [15] | Yao Dexin, San Hongjun, Wang Yaru, Sun Haijie, Chen Jiupeng, Yang Xiaoyuan. Improvement of A* Algorithm in Path Planning of Mobile Robot [J]. Journal of System Simulation, 2024, 36(11): 2684-2698. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
