

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (1): 54-65.doi: 10.16182/j.issn1004731x.joss.24-0584
• Special Column:Modeling,Simulation and Application for Intelligent Unmanned System • Previous Articles Next Articles
Wang Qiwei, Zhang Qi, Yang Shuo, Peng Yong
Received:2024-05-30
Revised:2024-08-21
Online:2025-01-20
Published:2025-01-23
Contact:
Zhang Qi
CLC Number:
Wang Qiwei, Zhang Qi, Yang Shuo, Peng Yong. Design of Robust Behavior Tree Control Architecture for Agents in Dynamic Task Environment[J]. Journal of System Simulation, 2025, 37(1): 54-65.
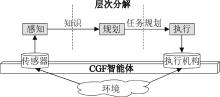
Fig. 1
Deliberative behavior decision paradigm
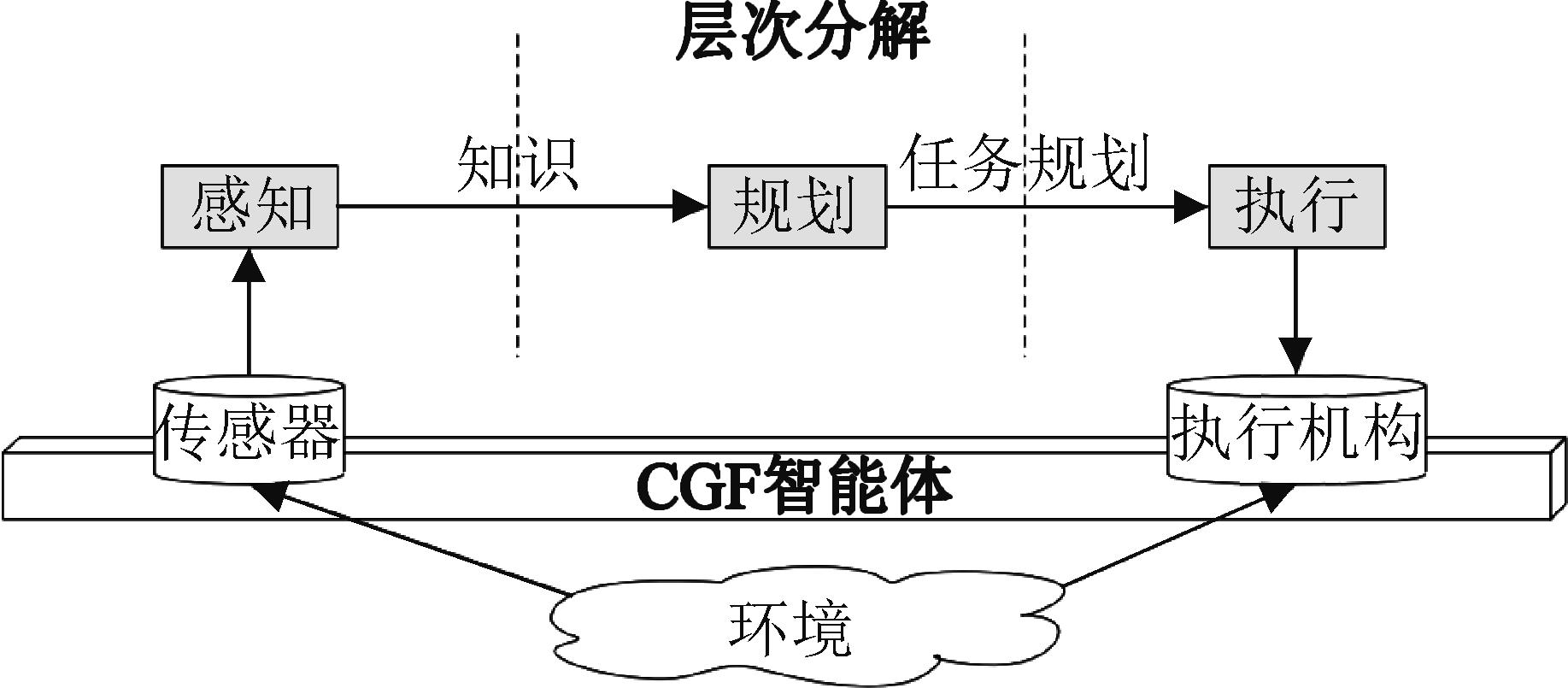

Fig. 2
Hybrid behavior decision paradigm
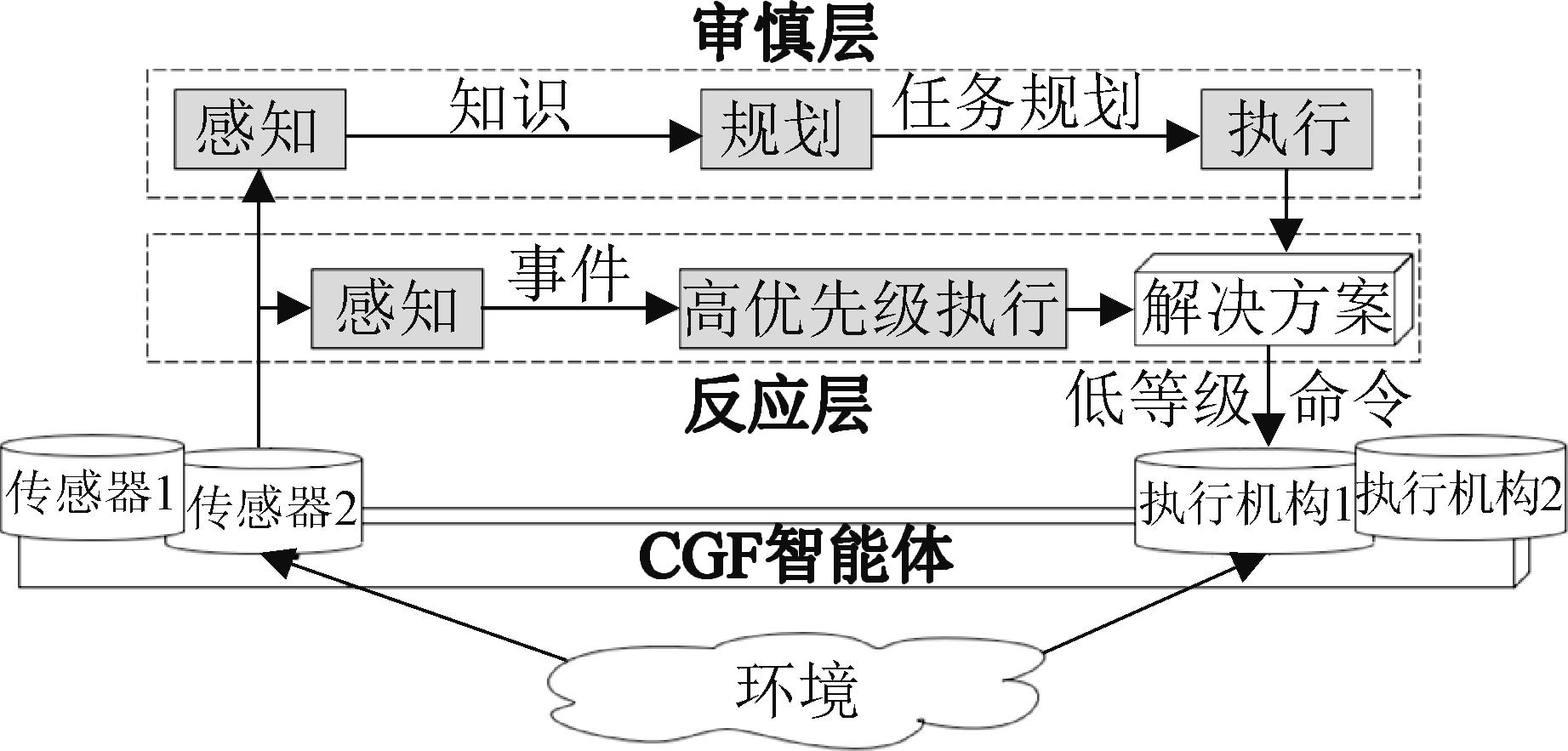
Fig. 3
Robust behavior tree architecture
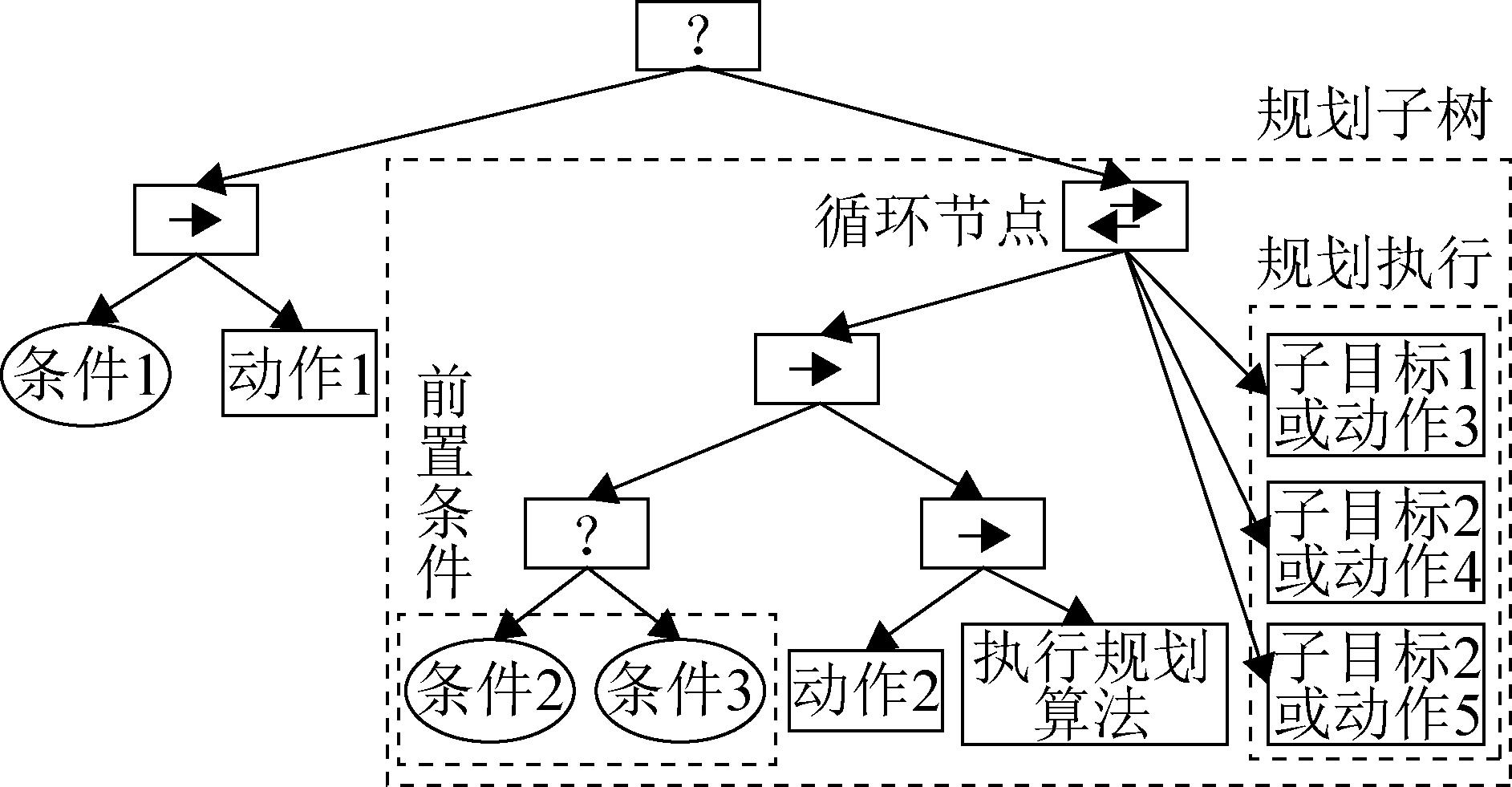
Table 1
Pseudo-code for behavior tree control architecture
算法1 行为树控制架构伪代码 |
|---|
1. Tick(FallbackNode(Preact 2. ifEnvironment Dynamically Changesthen 3. Execute(Preact.ActionNode(React)) 4. State←GetSense(State) 5. else Execute(plan) 6. Tick(LoopNode(dec, |

Fig. 4
General architecture of robust behavior tree planning subtree
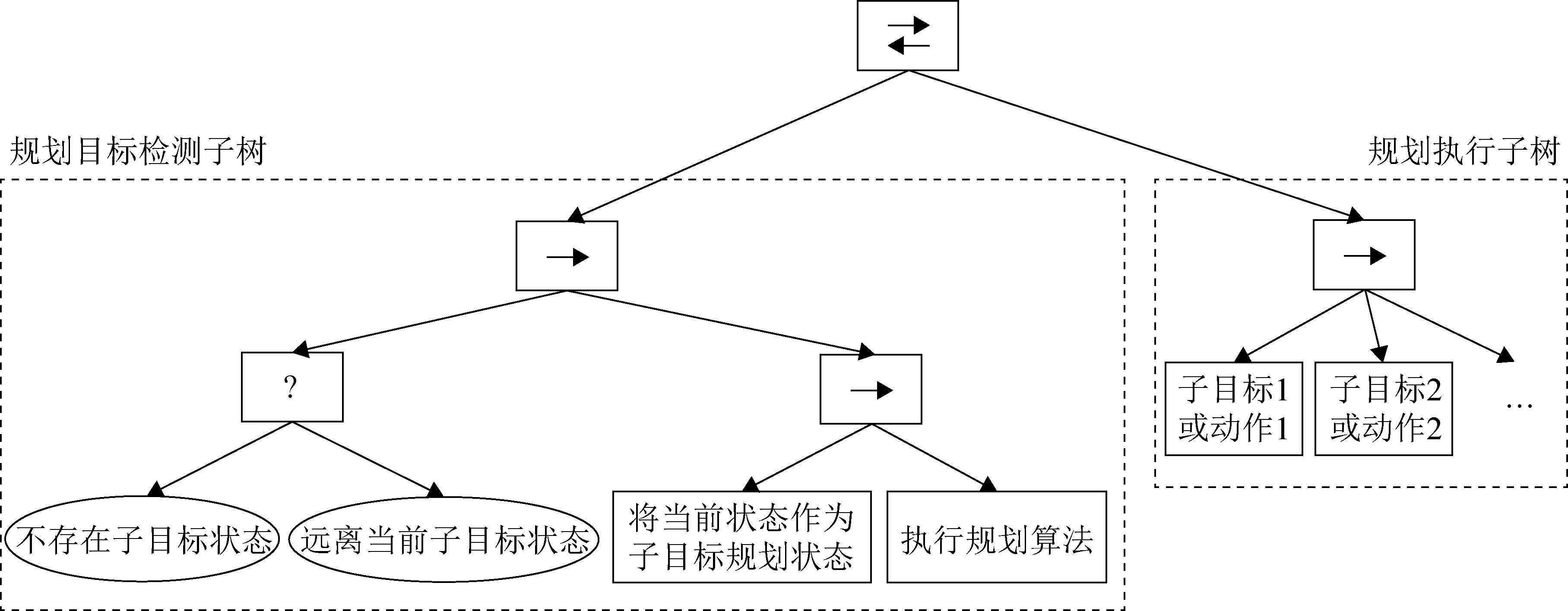
Fig. 5
Internal architecture of planning target detection subtree
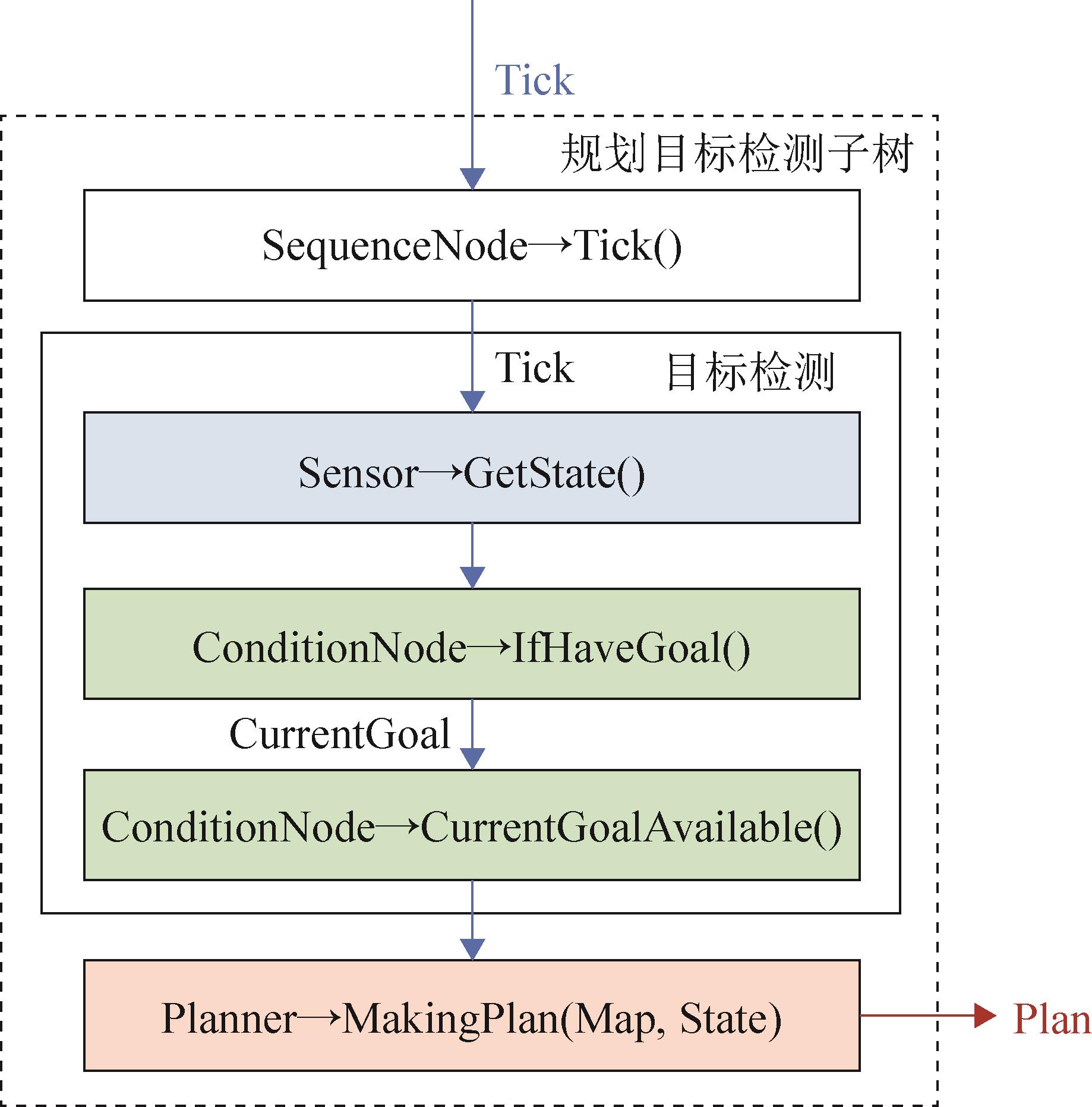
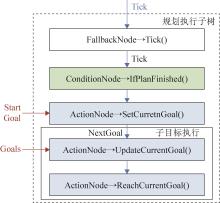
Fig. 6
Internal architecture of the planning execution subtree
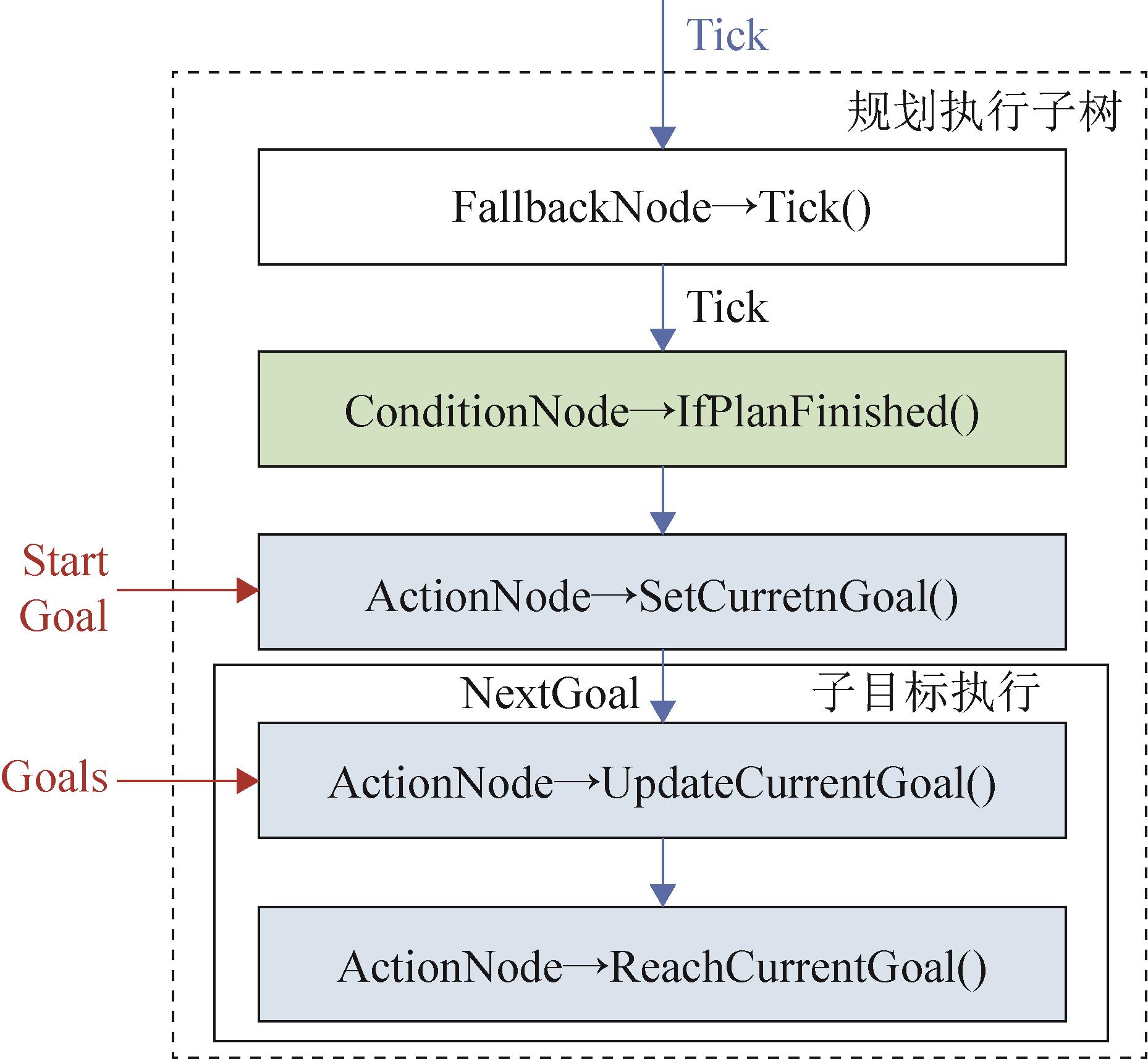
Table 2
Pseudo-code of the planning subtree Tplan
算法2 规划子树plan伪代码 |
|---|
1. Tick(LoopNode(dec, 2. dec←Plan.CurrentGoal 3. ifPlan.CurrentGoal is emptyornot availablethen 4. Plan←UserAlgorithm(Map, State) 5. end 6. Execute(exec.FallbackNode(plan)) 7. ifPlan.CurrentGoal is FinalGoalthen 8. return Success |

Fig. 7
External architecture of LoopNode
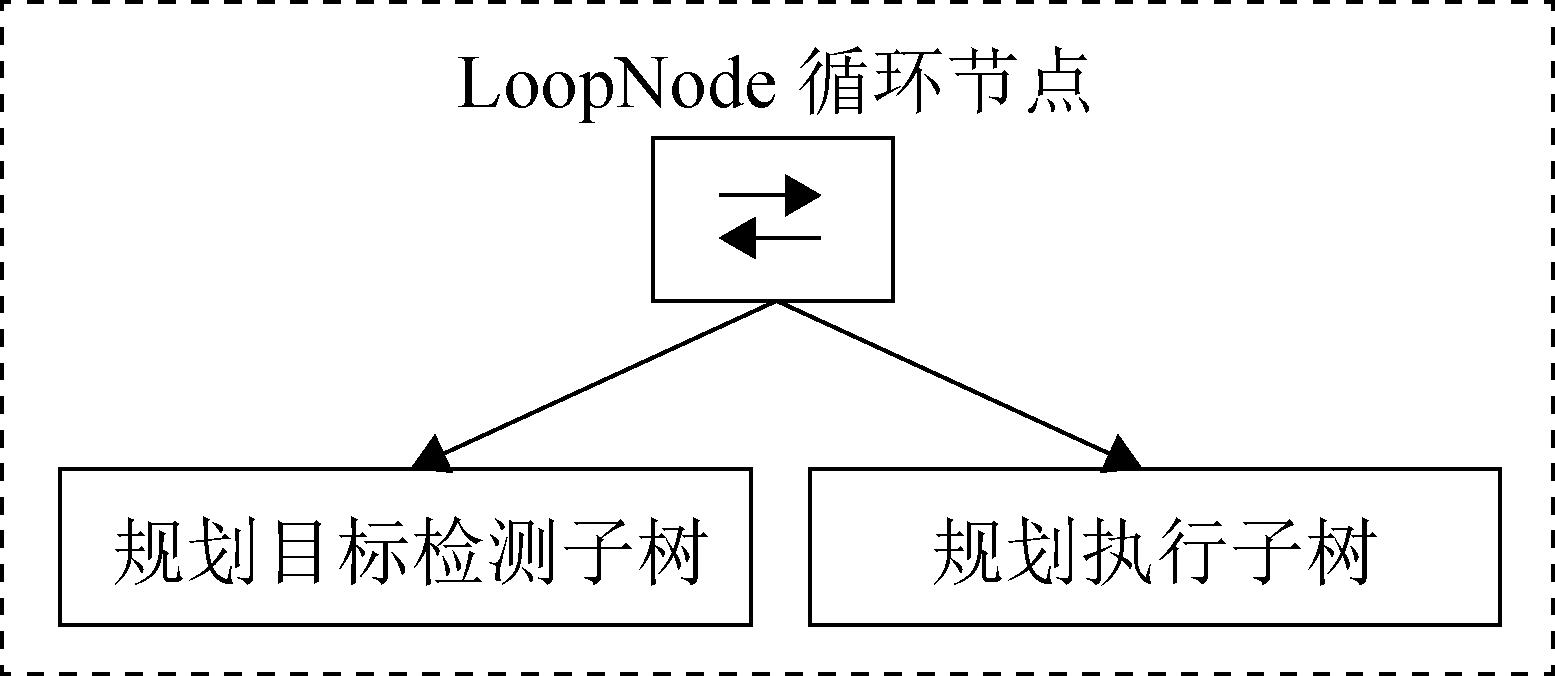

Fig. 8
Internal architecture of LoopNode
Table 3
Pseudo-code of LoopNode
算法3 循环节点LoopNode伪代码 |
|---|
1. Function Tick() 2. do 3. Execute( 4. ifCurrentGoalAvailability()←false then 5. Execute( 6. CurrentGoal←Plan.StartGoal 7. else 8. CurrentGoal←Plan.NextGoal 9. untilPlan.CurrentGoal is final goal |
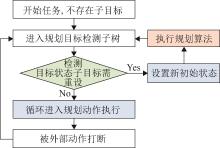
Fig. 9
Execution logic of planning subtree
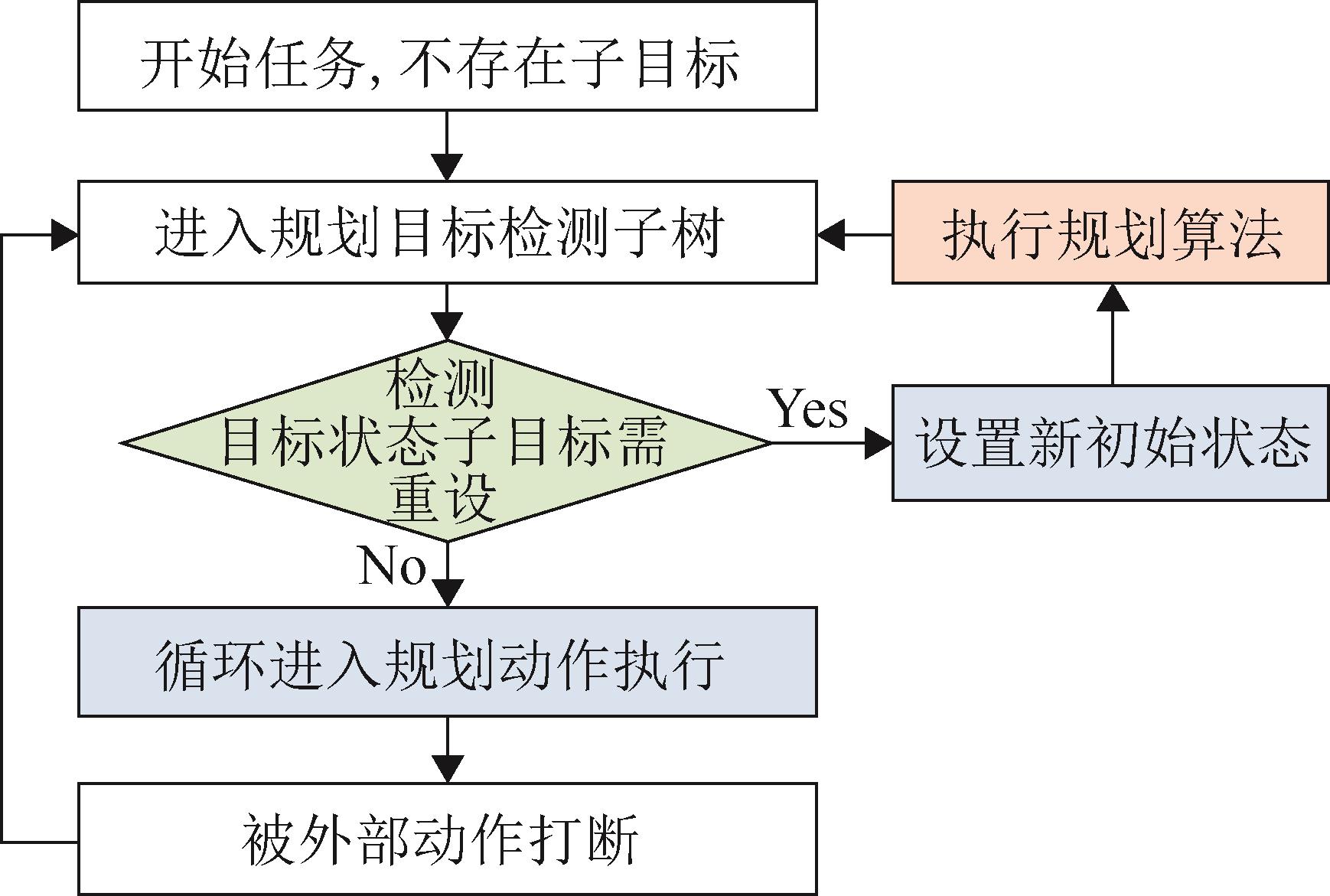

Fig. 10
Execution logic of the planning subtree under the control of LoopNode
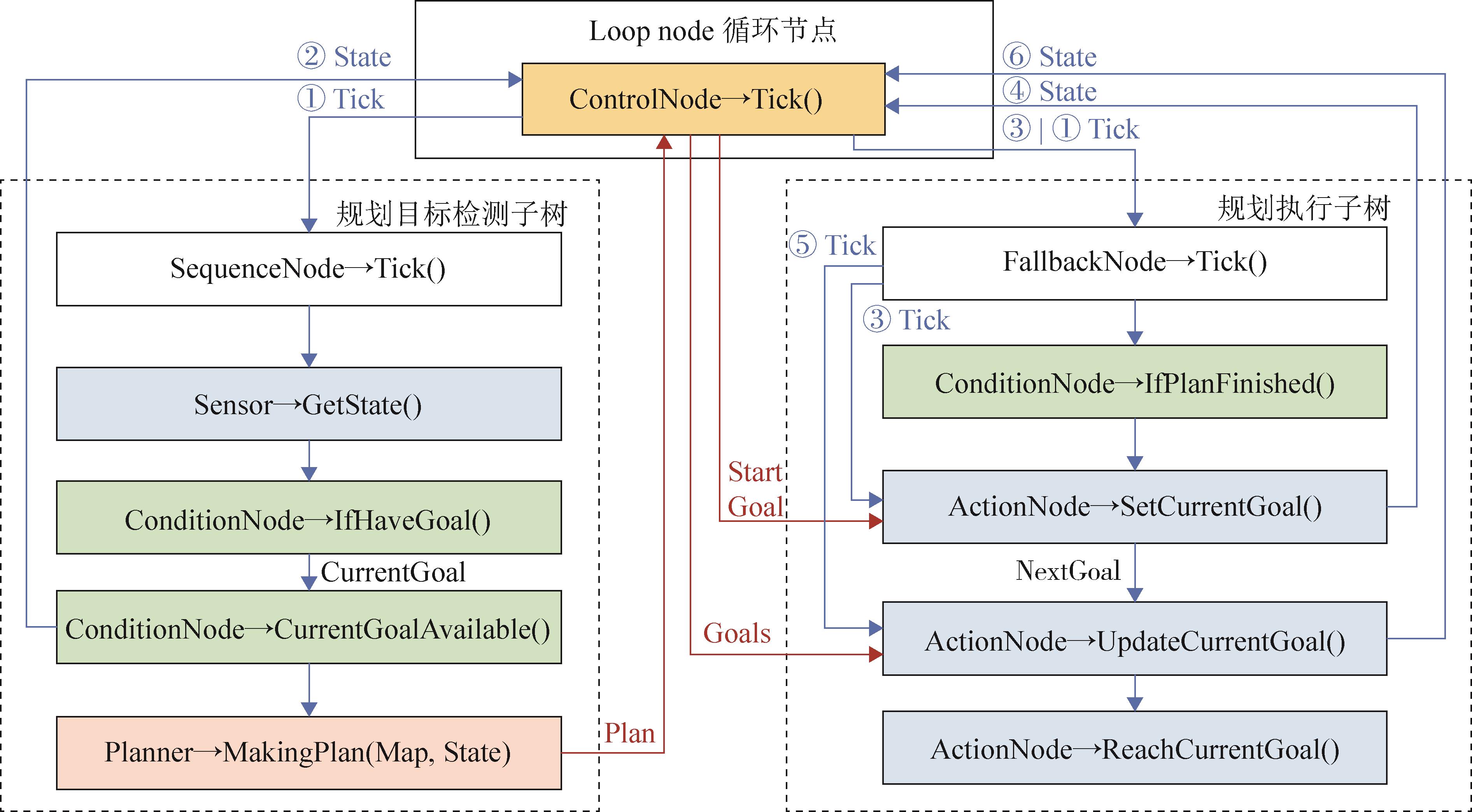

Fig. 11
Basic structure of the blue side agent’s reactive behavior tree

Fig. 12
Target detection subtree of path planning
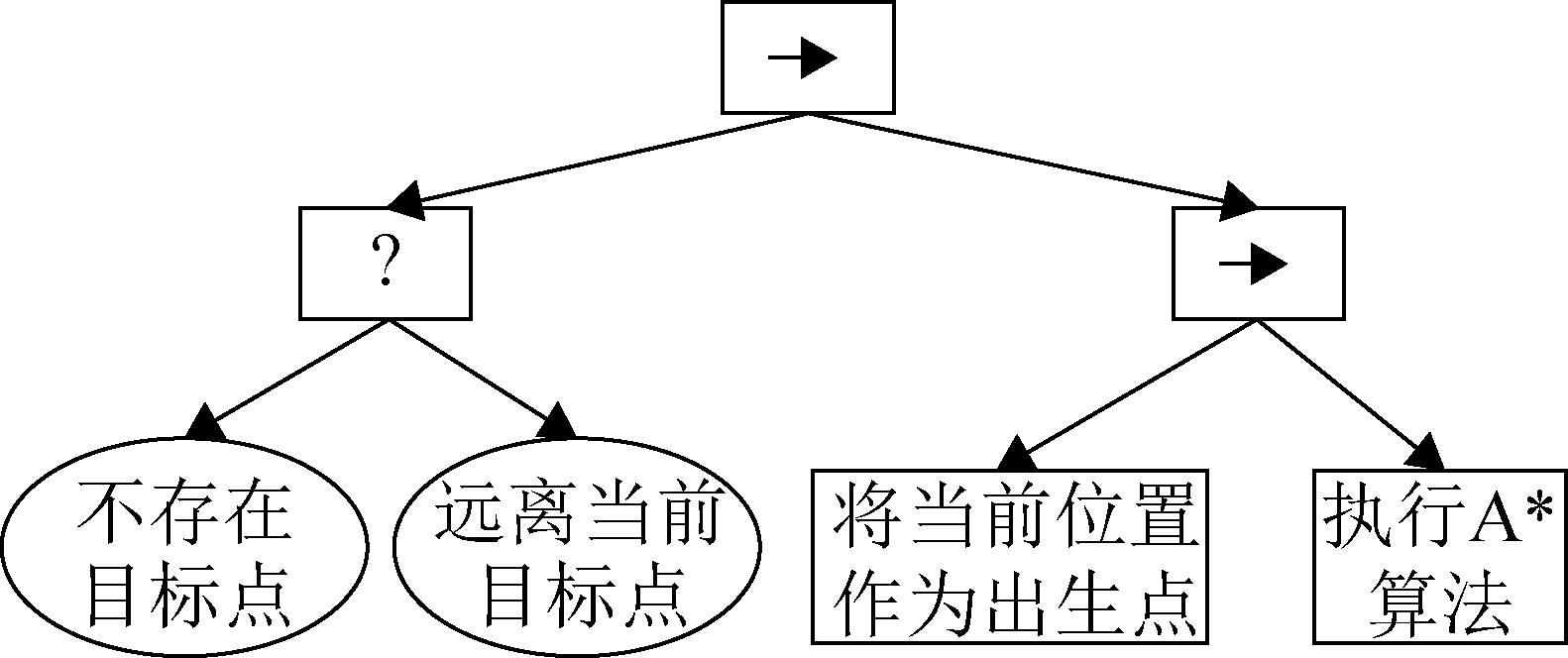

Fig. 13
Execution subtree of path planning
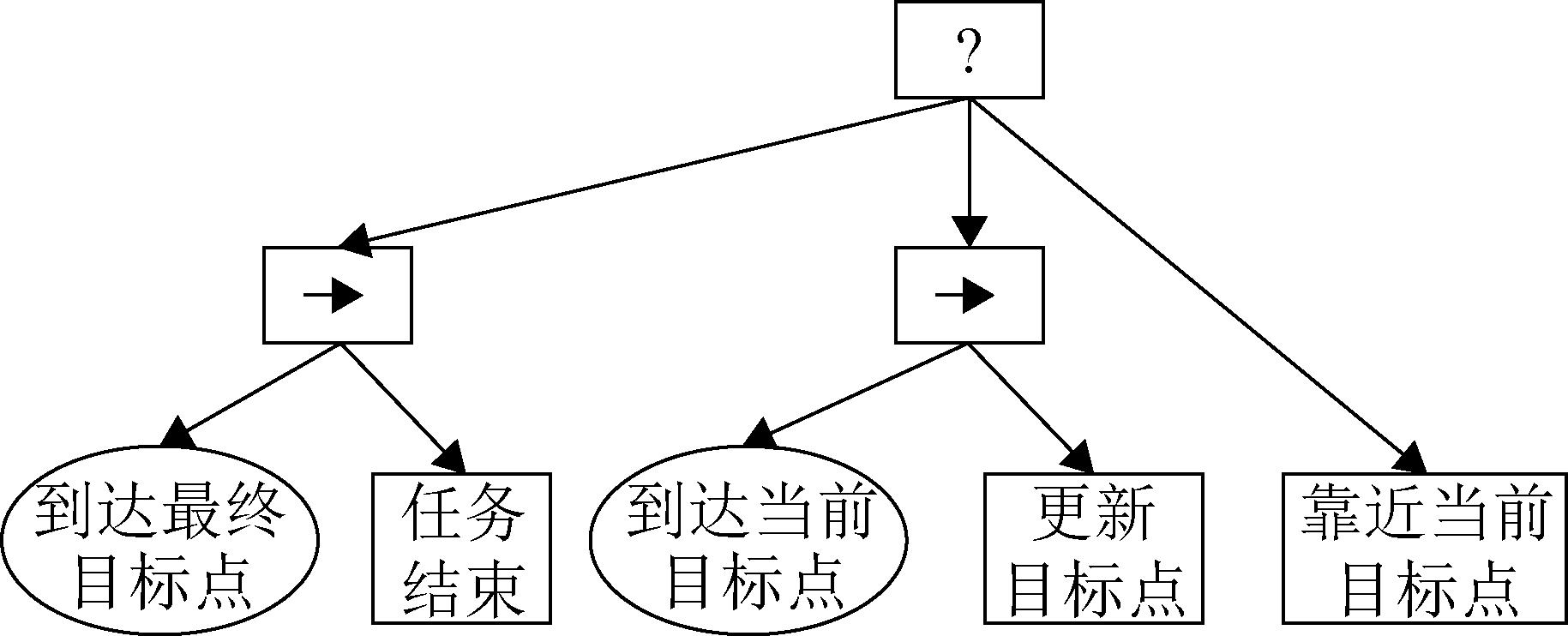

Fig. 14
Complete robust behavior tree architecture of the blue side agents
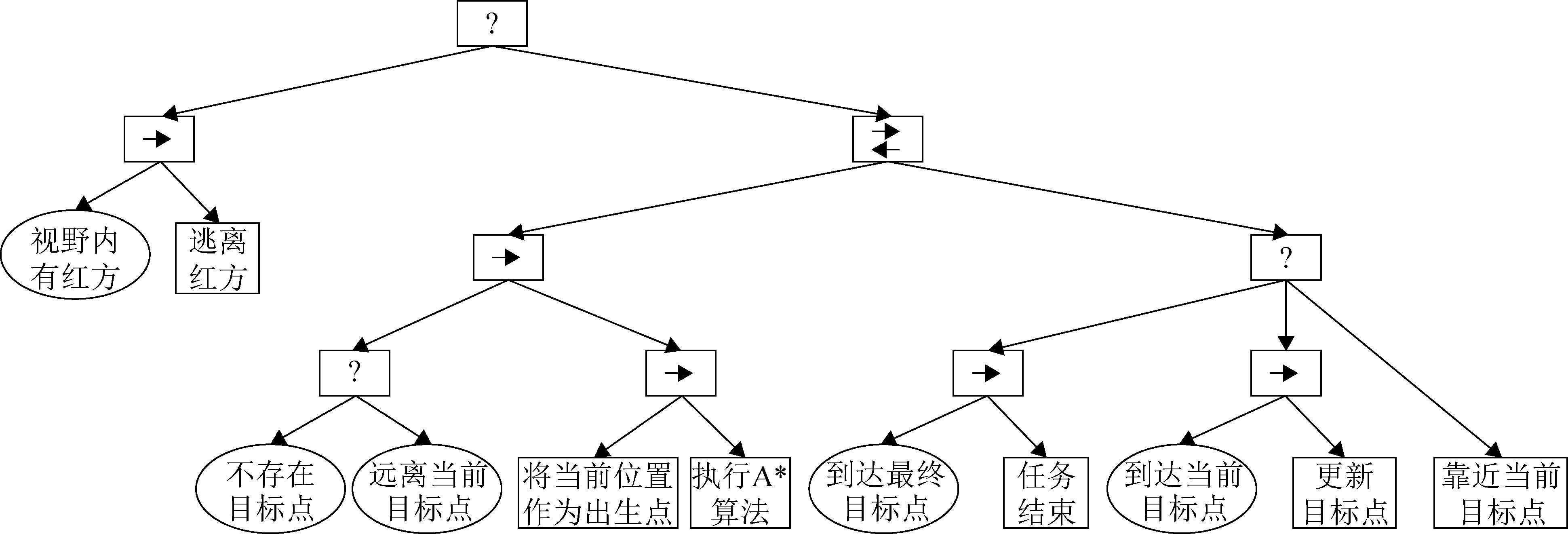
Table 4
Simulation parameter setting
| 参数名称 | 参数大小 | 参数类型 | 含义 |
|---|---|---|---|
| 红蓝方运动速度/ (m/s) | 25 | 智能体状态参数 | 双方智能体移动速度 |
| 智能体最大感知范围/ m | 30 | 智能体状态参数 | 该范围内对红方进行反应 |
| 地图面积/m2 | 490×490 | 环境参数 | 智能体运动的范围参考 |
| 静态障碍物面积/ m2 | 20×20 | 环境参数 | 每个障碍物块的大小 |
| 目标位置 | (20,20) | 目标参数 | 目标的中心坐标 |
| 仿真总时长/s | 300 | 时间参数 | 限制单次实验的最大时长 |
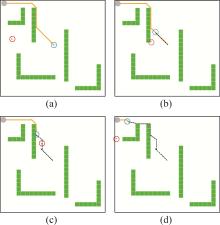
Fig. 15
Blue side agent’s motion trajectory in operation
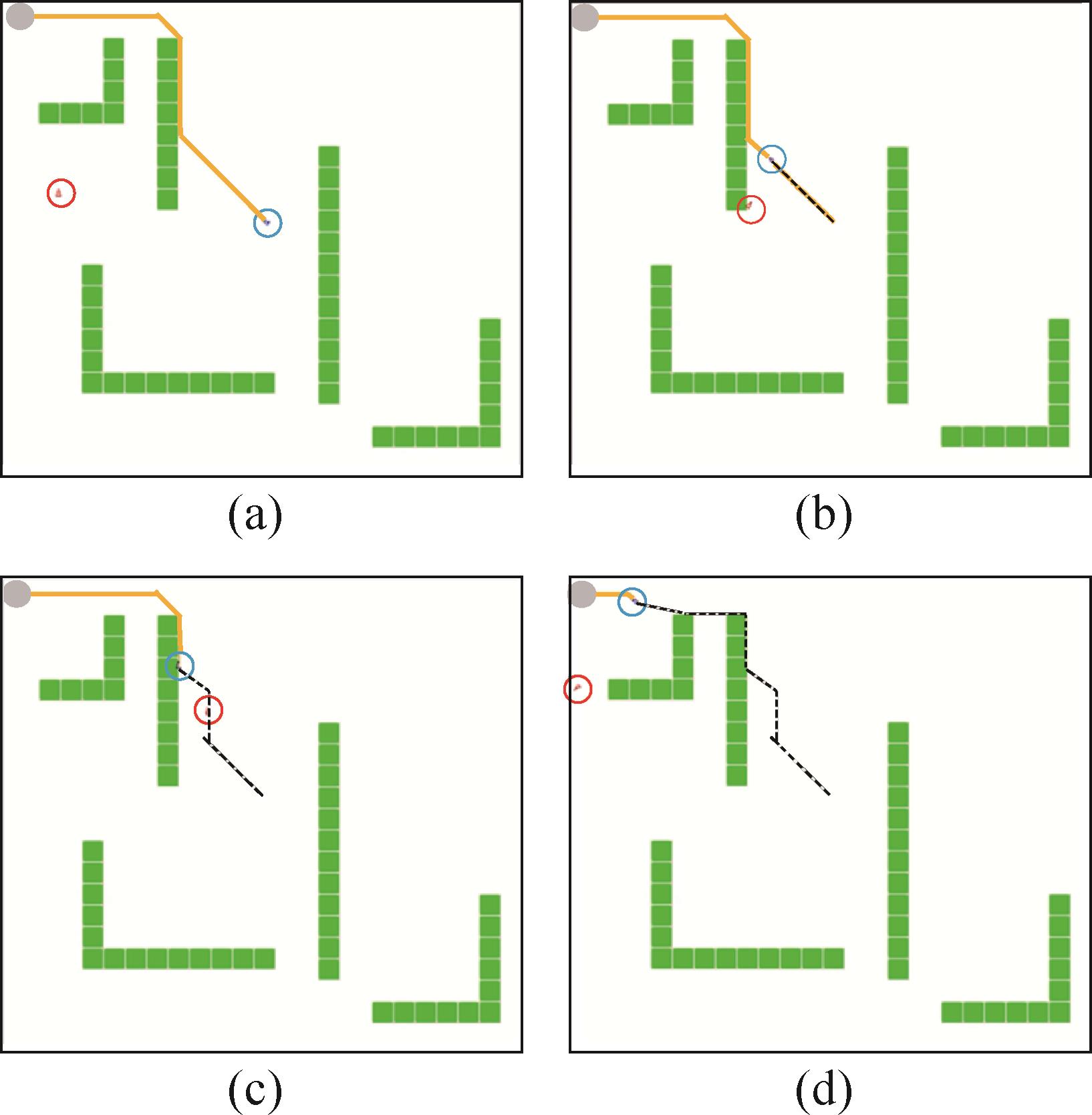
Fig. 16
Comparison of effects of two kinds of trees
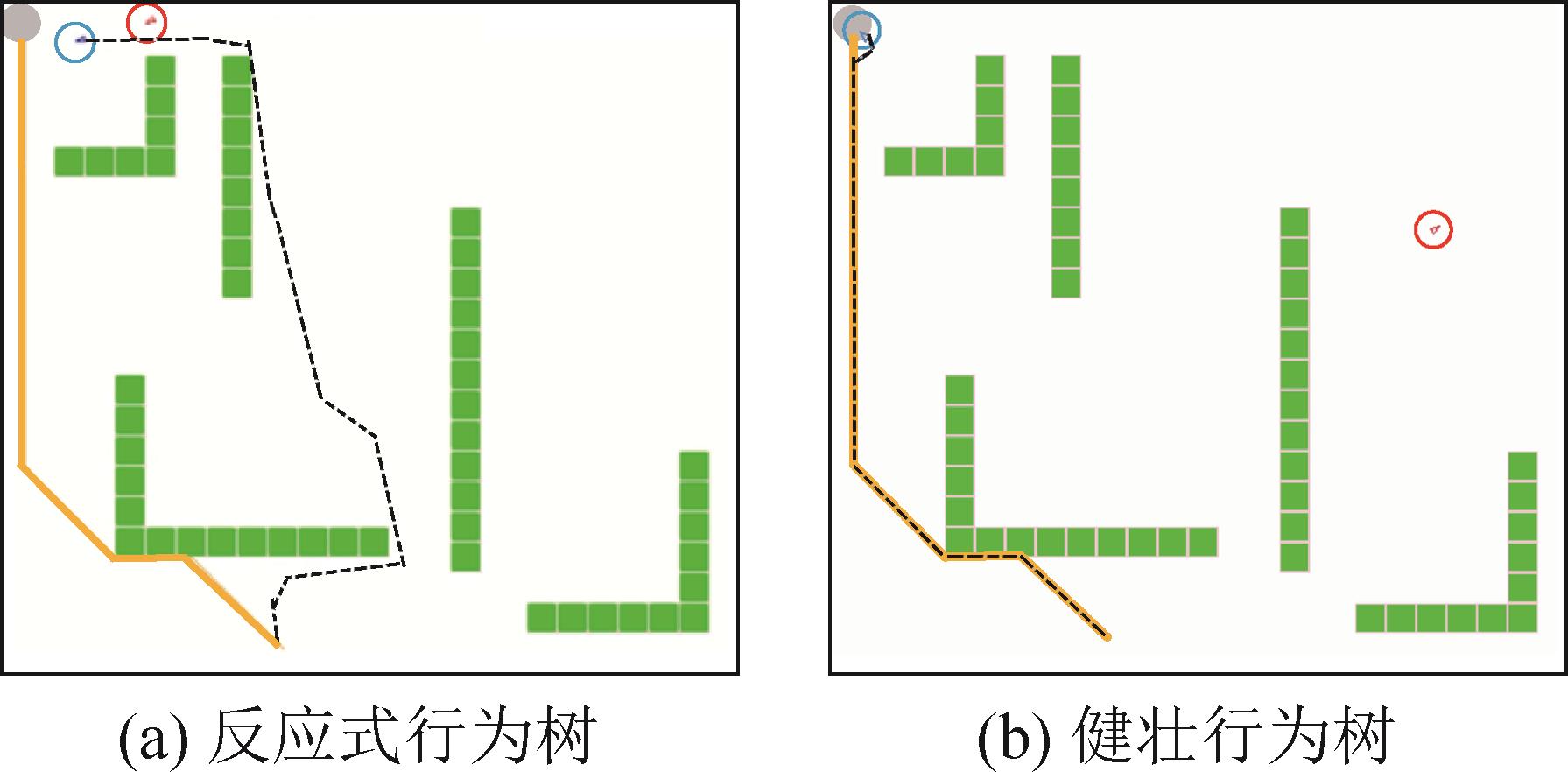
Table 5
Comparison of data before and after improvement
| 数据名称 | 反应树数值 | 健壮树数值 |
|---|---|---|
| 单回合平均运行时长/s | 22.89 | 18.33 |
| 运行至最大时间回合数 | 5 | 0 |
| 蓝方胜利回合数 | 40 | 45 |
| 1 | Luo Fanming, Jiang Shengyi, Yu Yang, et al. Adapt to Environment Sudden Changes by Learning a Context Sensitive Policy[C]//Thirty-Sixth AAAI Conference on Artificial Intelligence. Palo Alto, CA, USA: AAAI Press, 2022: 7637-7646. |
| 2 | Fozilov Khusniddin, Colan Jacinto, Sekiyama Kosuke, et al. Toward Autonomous Robotic Minimally Invasive Surgery: A Hybrid Framework Combining Task-motion Planning and Dynamic Behavior Trees[J]. IEEE Access, 2023, 11: 91206-91224. |
| 3 | 伍文迪. 基于行为树的群体机器人协同技术研究[D]. 长沙: 国防科技大学, 2020. |
| Wu Wendi. Research on Collaborative Technology of Swarm Robots Based on Behavior Tree[D]. Changsha: National University of Defense Technology, 2020. | |
| 4 | Li Ning, Jiang Hao, Li Chunpeng, et al. Towards Adaptive Behavior Trees for Robot Task Planning[C]//2022 China Automation Congress (CAC). Piscataway: IEEE, 2022: 6720-6725. |
| 5 | Ahmad Faseeh, Mayr Matthias, Krueger Volker. Learning to Adapt the Parameters of Behavior Trees and Motion Generators (BTMGs) to Task Variations[C]//2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2023: 10133-10140. |
| 6 | David Cáceres Domínguez, Iannotta Marco, Stork Johannes A, et al. A Stack-of-tasks Approach Combined with Behavior Trees: A New Framework for Robot Control[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 12110-12117. |
| 7 | Colledanchise Michele, Almeida Diogo, Ögren Petter. Towards Blended Reactive Planning and Acting Using Behavior Trees[C]//2019 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2019: 8839-8845. |
| 8 | 钟灿灿, 陈万米. 移动机器人的混合式路径规划算法研究[J]. 自动化仪表, 2021, 42(9): 61-66. |
| Zhong Cancan, Chen Wanmi. Research on Hybrid Path Planning Algorithm for Mobile Robots[J]. Process Automation Instrumentation, 2021, 42(9): 61-66. | |
| 9 | 华洪. 基于改进A*算法的自主移动机器人路径规划方法研究[D]. 南京: 南京理工大学, 2021. |
| 10 | 史殿习, 苏雅倩文, 李宁, 等. 基于行为树调度的多无人机未知室内空间探索方法[J]. 计算机科学, 2022, 49(增2): 71-81. |
| Shi Dianxi, Su Yaqianwen, Li Ning, et al. Multi-UAV Cooperative Exploring for Large Unknown Indoor Environment Based on Behavior Tree[J]. Computer Science, 2022, 49(S2): 71-81. | |
| 11 | 张琪. 学习驱动的CGF决策行为建模方法研究[D]. 长沙: 国防科技大学, 2018. |
| Zhang Qi. Research on Learning Driven Behavior Modeling Methods for Decision Making of Computer Generated Forces(CGFs)[D]. Changsha: National University of Defense Technology, 2018. | |
| 12 | 冷静. 面向实时避碰的无人水面机器人在线路径规划方法[D]. 北京: 中国科学院大学, 2014. |
| Leng Jing. Online Path Planning for Unmanned Surface Vehicles for Real-time Obstacle Avoidance[D]. Beijing: University of Chinese Academy of Sciences, 2014. | |
| 13 | Gustavsson Oscar, Iovino Matteo, Styrud Jonathan, et al. Combining Context Awareness and Planning to Learn Behavior Trees from Demonstration[C]//2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). Piscataway: IEEE, 2022: 1153-1160. |
| 14 | Leonardo Henrique Moreira, Célia Ghedini Ralha. Method for Evaluating Plan Recovery Strategies in Dynamic Multi-agent Environments[J]. Journal of Experimental & Theoretical Artificial Intelligence, 2023, 35(8): 1225-1249. |
| 15 | Pezzato Corrado, Carlos Hernández Corbato, Bonhof Stefan, et al. Active Inference and Behavior Trees for Reactive Action Planning and Execution in Robotics[J]. IEEE Transactions on Robotics, 2023, 39(2): 1050-1069. |
| 16 | Ruiz-Celada Oriol, Verma Parikshit, Diab M, et al. Automating Adaptive Execution Behaviors for Robot Manipulation[J]. IEEE Access, 2022, 10: 123489-123497. |
| 17 | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26. |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| 18 | 柳佳. 移动机器人路径规划和避障算法研究[D]. 武汉: 武汉理工大学, 2022. |
| Liu Jia. Research on Path Planning and Obstacle Avoidance Algorithm of Mobile Robot[D]. Wuhan: Wuhan University of Technology, 2022. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Yuan Jianchao, Yang Shuo, Zhang Qi, Li Ge. Research on Behavior Control Techniques for Autonomous Vehicles Based on Parallel Behavior Tree Architecture [J]. Journal of System Simulation, 2025, 37(6): 1542-1554. |
| [13] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [14] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [15] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
