

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (5): 1081-1092.doi: 10.16182/j.issn1004731x.joss.23-0024
Previous Articles Next Articles
Lei Xu( ), Chen Jingyi, Chen Xiaoyang
), Chen Jingyi, Chen Xiaoyang
Received:2023-01-06
Revised:2023-03-23
Online:2024-05-15
Published:2024-05-21
CLC Number:
Lei Xu, Chen Jingyi, Chen Xiaoyang. Research on Path Planning of Warehouse Robot with Improved Harris Hawks Algorithm[J]. Journal of System Simulation, 2024, 36(5): 1081-1092.

Fig. 1
Comparison of initialized population distribution
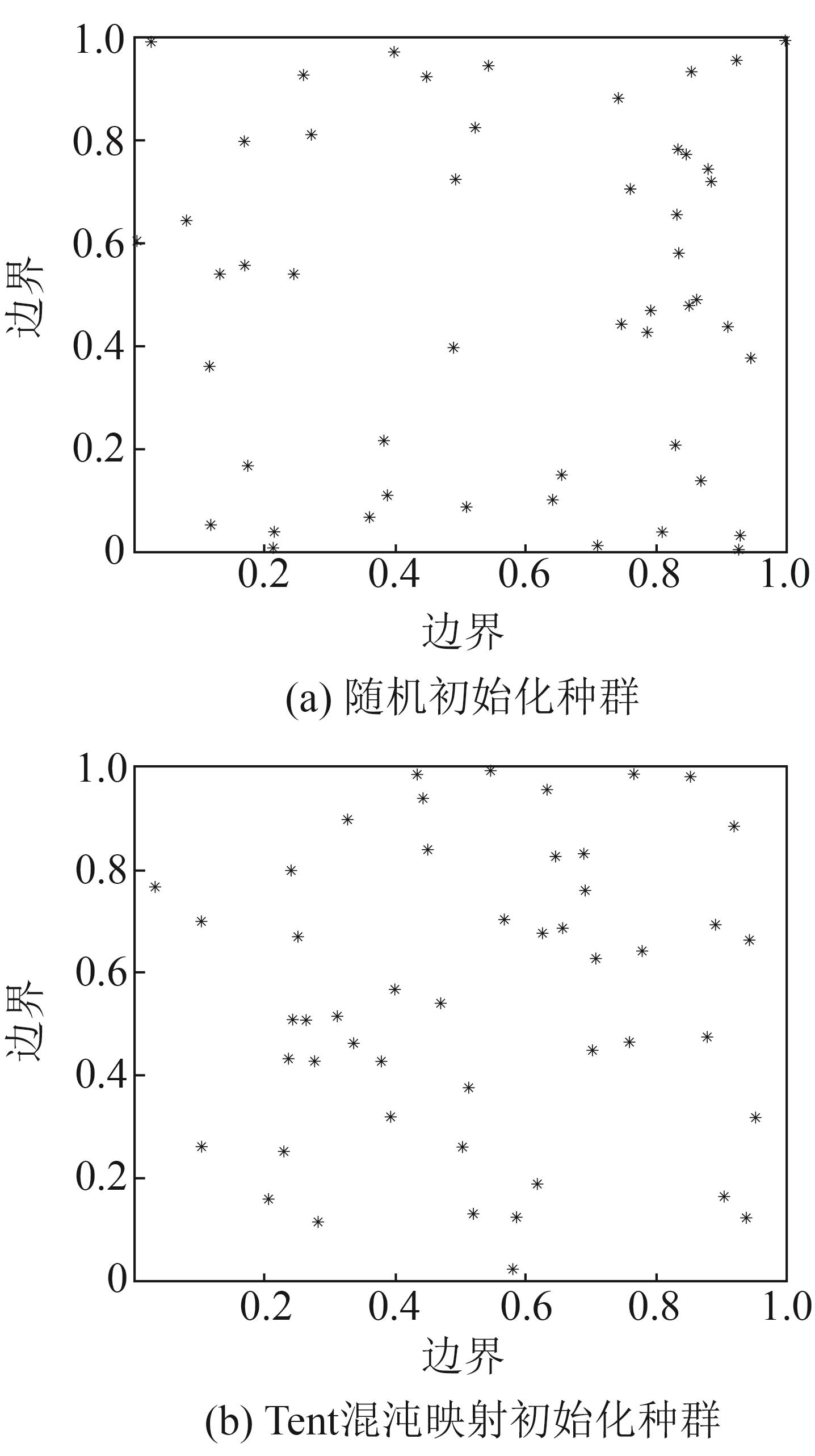
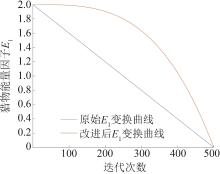
Fig. 2
Transformation curve of prey energy factor El
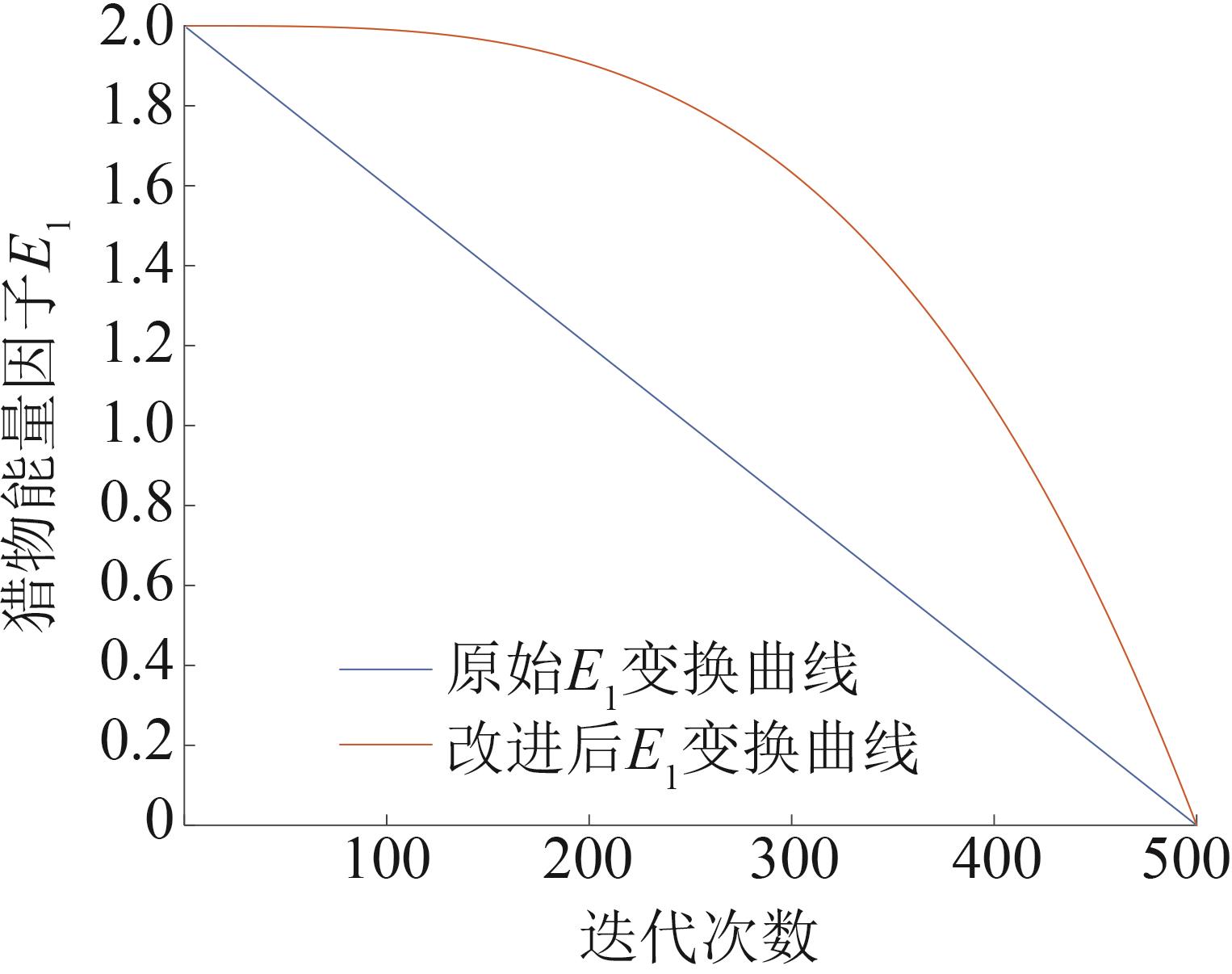

Fig. 3
Transformation curve of escape energy factor E

Table 1
Simulation experiment algorithm parameter setting
| 算法参数 | 参数值 |
|---|---|
| 种群规模N | 30 |
| 搜索维度D | 10(10 |
| 30(30 | |
| 40(40 | |
| 最大迭代次数T | 500 |
| 逃逸能量调控因子a | 1.2 |
| 柯西反学习变异概率p | 0.5 |
| 搜索空间上界bU | 10(10 |
| 30(30 | |
| 40(40 | |
| 搜索空间下界bL | 1 |

Fig. 4
Optimal path results of 5 algorithms in different scale obstacle sparse environments
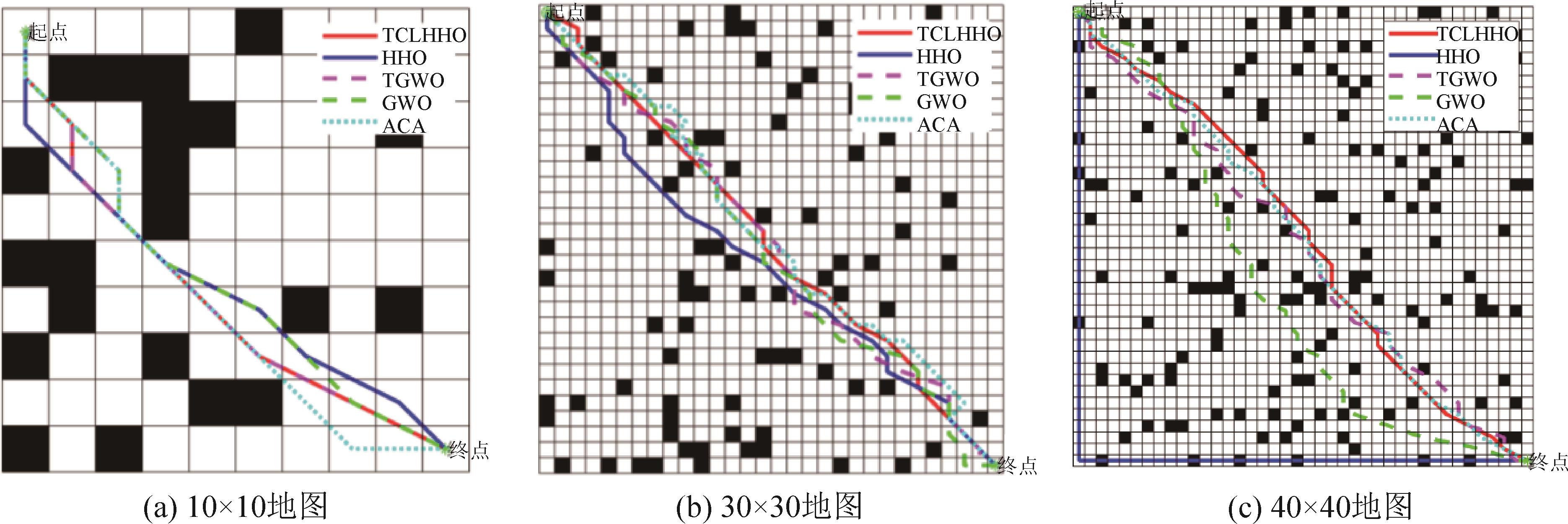

Fig. 5
Optimal iterative curve of 5 algorithms in different scale obstacle sparse environments
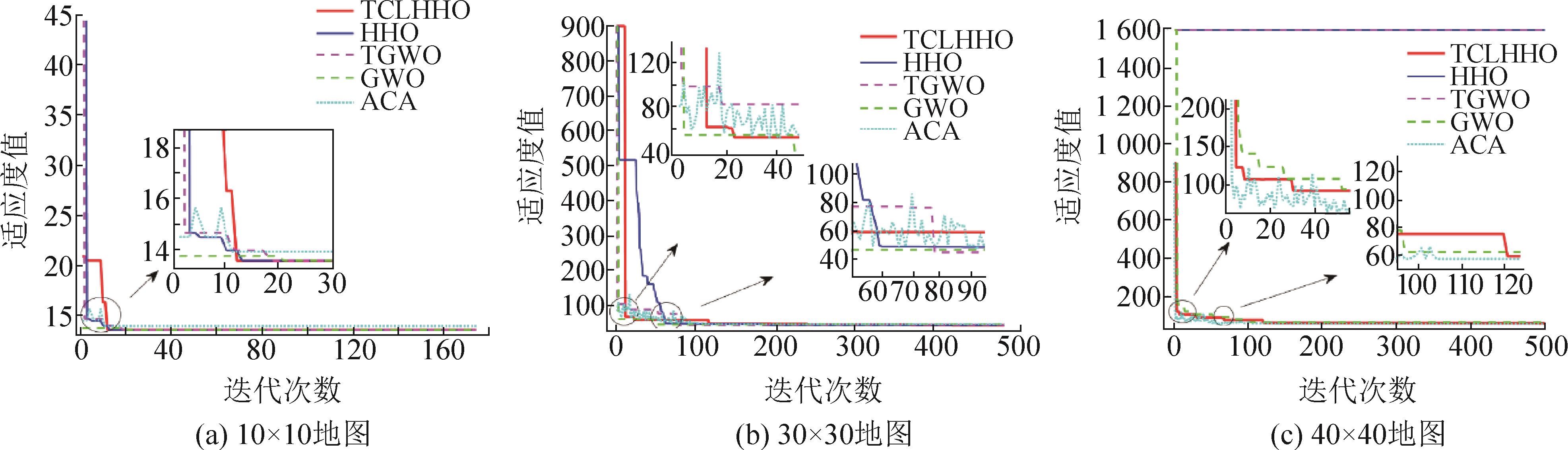
Table 2
Performance comparison of 5 algorithms in discrete raster maps of different scales based on 30 experiments
| 地图规模 | 算法 | |||||
|---|---|---|---|---|---|---|
| 10 | TCLHHO | 13.543 2 | 4 | 0 | 0.323 8 | 17 |
| HHO | 13.543 2 | 5 | 0 | 0.444 5 | 28 | |
| TGWO | 13.543 2 | 4 | 0 | 0.232 5 | 24 | |
| GWO | 13.543 2 | 6 | 0 | 0.251 3 | 34 | |
| ACA | 13.899 5 | 5 | 0 | 0.516 8 | 23 | |
| 30 | TCLHHO | 43.459 9 | 11 | 0.578 4 | 0.367 5 | 136 |
| HHO | 44.290 2 | 16 | 1.413 2 | 0.381 4 | 56 | |
| TGWO | 44.569 9 | 15 | 1.109 4 | 0.348 4 | 83 | |
| GWO | 45.226 2 | 21 | 0.673 1 | 0.324 6 | 67 | |
| ACA | 47.606 4 | 25 | 1.596 0 | 28.815 9 | 113 | |
| 40 | TCLHHO | 56.364 1 | 18 | 1.332 6 | 0.615 2 | 128 |
| HHO | — | — | — | — | — | |
| TGWO | — | — | — | — | — | |
| GWO | 63.077 2 | 29 | 9.648 9 | 0.4179 | 117 | |
| ACA | 57.283 7 | 23 | 1.351 1 | 79.6561 | 104 |

Fig. 6
Optimal path results of 5 algorithms in different scale warehouse environments
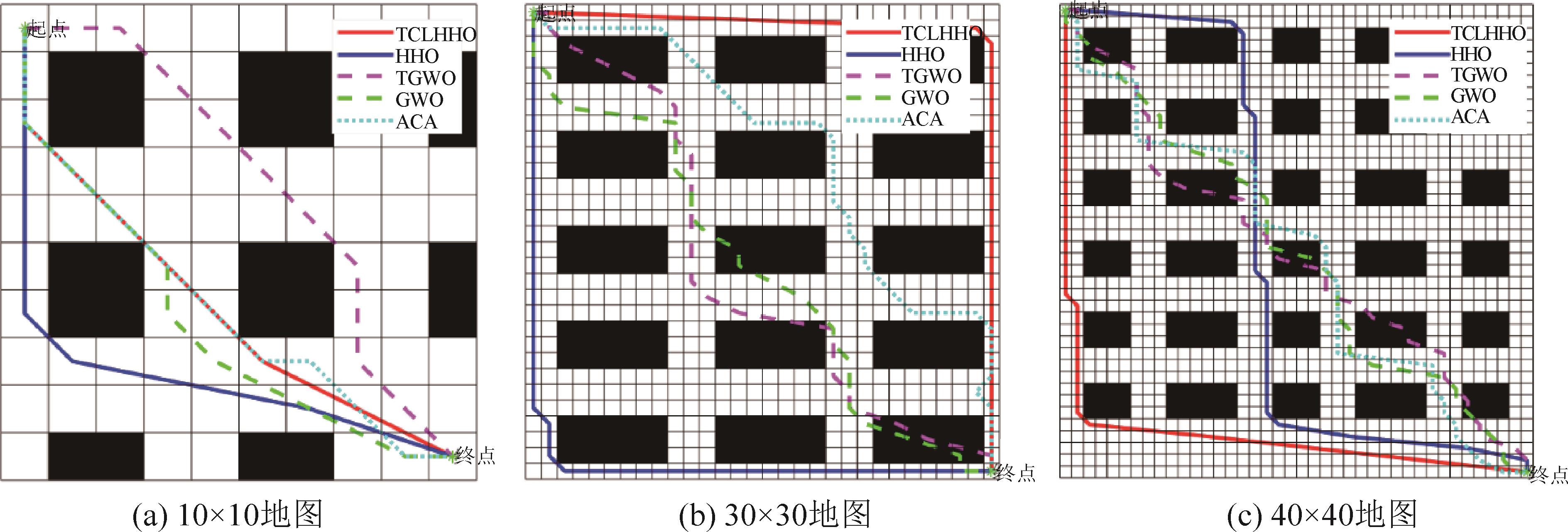
Fig. 7
Optimal iteration curves of 5 algorithms in different scale warehouse environments
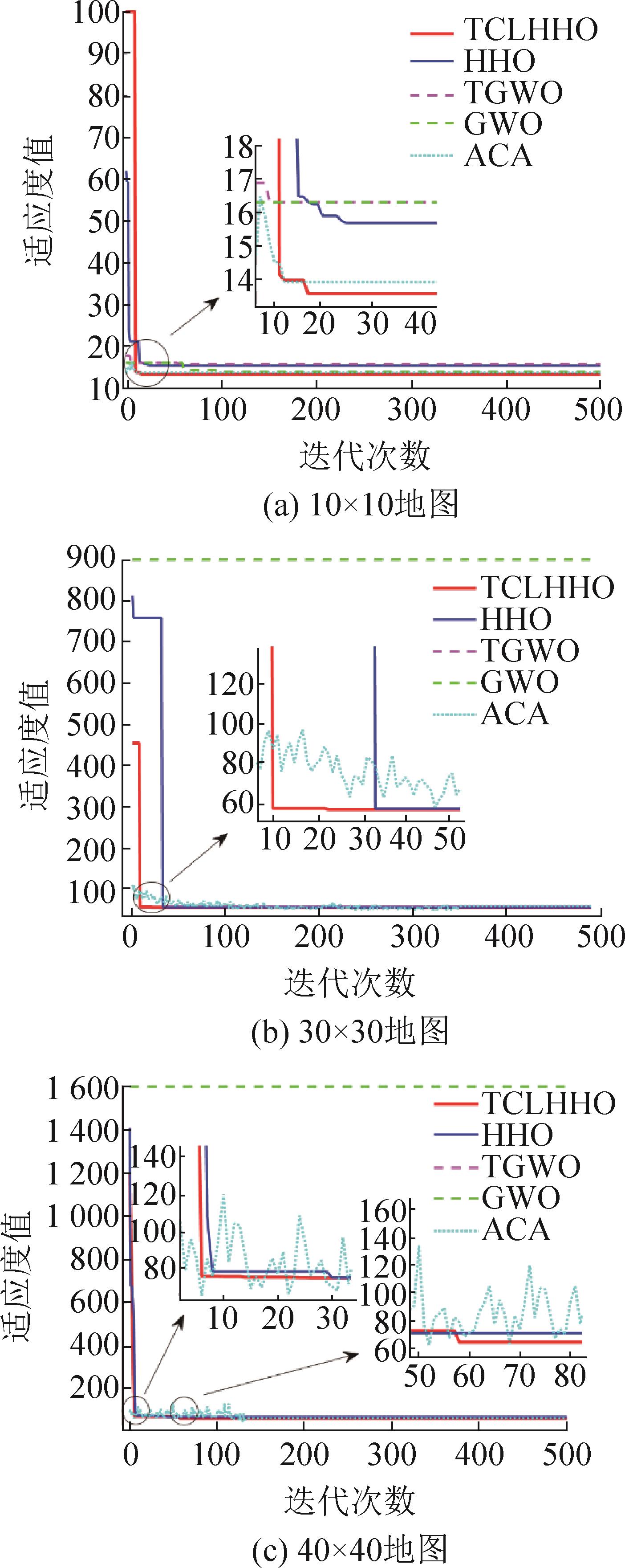
Table 3
Performance comparison of 5 algorithms in regular raster maps of different scales based on 30 experiments
| 地图规模 | 算法 | |||||
|---|---|---|---|---|---|---|
| 10 | TCLHHO | 13.756 4 | 2 | 2.022 8 | 0.505 8 | 17 |
| HHO | 13.969 7 | 2 | 2.697 2 | 0.569 7 | 32 | |
| TGWO | 15.202 2 | 3 | 4.849 1 | 0.233 7 | 20 | |
| GWO | 15.268 7 | 4 | 3.913 1 | 0.305 2 | 63 | |
| ACA | 14.041 0 | 4 | 1.341 6 | 0.827 1 | 13 | |
| 30 | TCLHHO | 55.633 7 | 2 | 3.029 1 | 0.546 2 | 26 |
| HHO | 56.709 5 | 4 | 0.572 9 | 0.568 1 | 38 | |
| TGWO | — | — | — | — | — | |
| GWO | — | — | — | — | — | |
| ACA | 57.229 8 | 15 | 8.366 7 | 26.476 4 | 342 | |
| 40 | TCLHHO | 64.989 1 | 4 | 6.581 7 | 0.973 4 | 58 |
| HHO | 71.341 1 | 9 | 2.468 4 | 1.085 0 | 43 | |
| TGWO | — | — | — | — | — | |
| GWO | — | — | — | — | — | |
| ACA | 68.825 9 | 18 | 10.279 1 | 78.314 9 | 137 |
| 1 | Boysen Nils, René de Koster, Weidinger Felix. Warehousing in the E-commerce Era: A Survey[J]. European Journal of Operational Research, 2019, 277(2): 396-411. |
| 2 | 朱大奇, 颜明重. 移动机器人路径规划技术综述[J]. 控制与决策, 2010, 25(7): 961-967. |
| Zhu Daqi, Yan Mingzhong. Survey on Technology of Mobile Robot Path Planning[J]. Control and Decision, 2010, 25(7): 961-967. | |
| 3 | 庞燕, 罗华丽, 邢立宁, 等. 车辆路径优化问题及求解方法研究综述[J]. 控制理论与应用, 2019, 36(10): 1573-1584. |
| Pang Yan, Luo Huali, Xing Lining, et al. A Survey of Vehicle Routing Optimization Problems and Solution Methods[J]. Control Theory & Applications, 2019, 36(10): 1573-1584. | |
| 4 | Seyyed Mohammad Hosseini Rostami, Arun Kumar Sangaiah, Wang Jin, et al. Obstacle Avoidance of Mobile Robots Using Modified Artificial Potential Field Algorithm[J]. EURASIP Journal on Wireless Communications and Networking, 2019, 2019(1): 70. |
| 5 | 赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910. |
| Zhao Xiao, Wang Zheng, Huang Chengkan, et al. Mobile Robot Path Planning Based on an Improved A* Algorithm[J]. Robot, 2018, 40(6): 903-910. | |
| 6 | Alshammrei Shaher, Boubaker Sahbi, Kolsi Lioua. Improved Dijkstra Algorithm for Mobile Robot Path Planning and Obstacle Avoidance[J]. Computers, Materials & Continua, 2022, 72(3): 5939-5954. |
| 7 | Kumar Kar Arpan. Bio Inspired Computing-A Review of Algorithms and Scope of Applications[J]. Expert Systems with Applications, 2016, 59: 20-32. |
| 8 | Nazarahari Milad, Khanmirza Esmaeel, Doostie Samira. Multi-objective Multi-robot Path Planning in Continuous Environment Using an Enhanced Genetic Algorithm[J]. Expert Systems with Applications, 2019, 115: 106-120. |
| 9 | Ajeil Fatin H, Ibraheem Kasim Ibraheem, Sahib Mouayad A, et al. Multi-objective Path Planning of an Autonomous Mobile Robot Using Hybrid PSO-MFB Optimization Algorithm[J]. Applied Soft Computing, 2020, 89: 106076. |
| 10 | Liu Jianhua, Yang Jianguo, Liu Huaping, et al. An Improved Ant Colony Algorithm for Robot Path Planning[J]. Soft Computing, 2017, 21(19): 5829-5839. |
| 11 | Ali Asghar Heidari, Mirjalili Seyedali, Faris Hossam, et al. Harris Hawks Optimization: Algorithm and Applications[J]. Future Generation Computer Systems, 2019, 97: 849-872. |
| 12 | Rodríguez-Esparza RodríErick, Zanella-Calzada Laura A, Oliva Diego, et al. An Efficient Harris Hawks-inspired Image Segmentation Method[J]. Expert Systems with Applications, 2020, 155: 113428. |
| 13 | Jiao Shan, Chong Guoshuang, Huang Changcheng, et al. Orthogonally Adapted Harris Hawks Optimization for Parameter Estimation of Photovoltaic Models[J]. Energy, 2020, 203: 117804. |
| 14 | Belge Egemen, Altan Aytaç, Hacıoğlu Rıfat. Metaheuristic Optimization-based Path Planning and Tracking of Quadcopter for Payload Hold-release Mission[J]. Electronics, 2022, 11(8): 1208. |
| 15 | Zhang Ran, Li Sen, Ding Yuanming, et al. UAV Path Planning Algorithm Based on Improved Harris Hawks Optimization[J]. Sensors, 2022, 22(14): 5232. |
| 16 | Nandi Ayani, Vikram Kumar Kamboj. A Canis Lupus Inspired Upgraded Harris Hawks Optimizer for Nonlinear, Constrained, Continuous, and Discrete Engineering Design Problem[J]. International Journal for Numerical Methods in Engineering, 2021, 122(4): 1051-1088. |
| 17 | Kaveh A, Rahmani P, Dadras Eslamlou A. An Efficient Hybrid Approach Based on Harris Hawks Optimization and Imperialist Competitive Algorithm for Structural Optimization[J]. Engineering with Computers, 2022, 38(2): 1555-1583. |
| 18 | Qu Chiwen, Zhang Lupeng, Li Jinlong, et al. Improving Feature Selection Performance for Classification of Gene Expression Data Using Harris Hawks Optimizer with Variable Neighborhood Learning[J]. Briefings in Bioinformatics, 2021, 22(5): bbab097. |
| 19 | Jia Heming, Lang Chunbo, Oliva Diego, et al. Dynamic Harris Hawks Optimization with Mutation Mechanism for Satellite Image Segmentation[J]. Remote Sensing, 2019, 11(12): 1421. |
| 20 | Hussien Abdelazim G, Amin Mohamed. A Self-adaptive Harris Hawks Optimization Algorithm with Opposition-based Learning and Chaotic Local Search Strategy for Global Optimization and Feature Selection[J]. International Journal of Machine Learning and Cybernetics, 2022, 13(2): 309-336. |
| 21 | Nasr Aida A. A New Cloud Autonomous System as a Service for Multi-mobile Robots[J]. Neural Computing and Applications, 2022, 34(23): 21223-21235. |
| 22 | Amin Abdollahi Dehkordi, Sadiq A S, Mirjalili Seyedali, et al. Nonlinear-based Chaotic Harris Hawks Optimizer: Algorithm and Internet of Vehicles Application[J]. Applied Soft Computing, 2021, 109: 107574. |
| 23 | 滕志军, 吕金玲, 郭力文, 等. 一种基于Tent映射的混合灰狼优化的改进算法[J]. 哈尔滨工业大学学报, 2018, 50(11): 40-49. |
| Teng Zhijun, Jinling Lü, Guo Liwen, et al. An Improved Hybrid Grey Wolf Optimization Algorithm Based on Tent Mapping[J]. Journal of Harbin Institute of Technology, 2018, 50(11): 40-49. | |
| 24 | Wang Wenchuan, Xu Lei, Chau K W, et al. Yin-yang Firefly Algorithm Based on Dimensionally Cauchy Mutation[J]. Expert Systems with Applications, 2020, 150: 113216. |
| 25 | 何庆, 林杰, 徐航. 混合柯西变异和均匀分布的蝗虫优化算法[J]. 控制与决策, 2021, 36(7): 1558-1568. |
| He Qing, Lin Jie, Xu Hang. Hybrid Cauchy Mutation and Uniform Distribution of Grasshopper Optimization Algorithm[J]. Control and Decision, 2021, 36(7): 1558-1568. | |
| 26 | Shi Kangjing, Huang Li, Jiang Du, et al. Path Planning Optimization of Intelligent Vehicle Based on Improved Genetic and Ant Colony Hybrid Algorithm[J]. Frontiers in Bioengineering and Biotechnology, 2022, 10: 905983. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [5] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [6] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [7] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [8] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [9] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [10] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [11] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [12] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [13] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [14] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [15] | Zhang Sen, Dai Qiangqiang. UAV Path Planning Based on Improved Deep Deterministic Policy Gradients [J]. Journal of System Simulation, 2025, 37(4): 875-881. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
