

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (2): 392-403.doi: 10.16182/j.issn1004731x.joss.23-1166
• Papers • Previous Articles Next Articles
Li Weigang1,2, Zou Shaofeng2, Wang Yongqiang2, Yu Chuxiang2
Received:2023-09-19
Revised:2023-11-04
Online:2025-02-14
Published:2025-02-10
CLC Number:
Li Weigang, Zou Shaofeng, Wang Yongqiang, Yu Chuxiang. Intensity-based Feature Filtering for LiDAR-based SLAM[J]. Journal of System Simulation, 2025, 37(2): 392-403.

Fig. 1
Intensity calibration
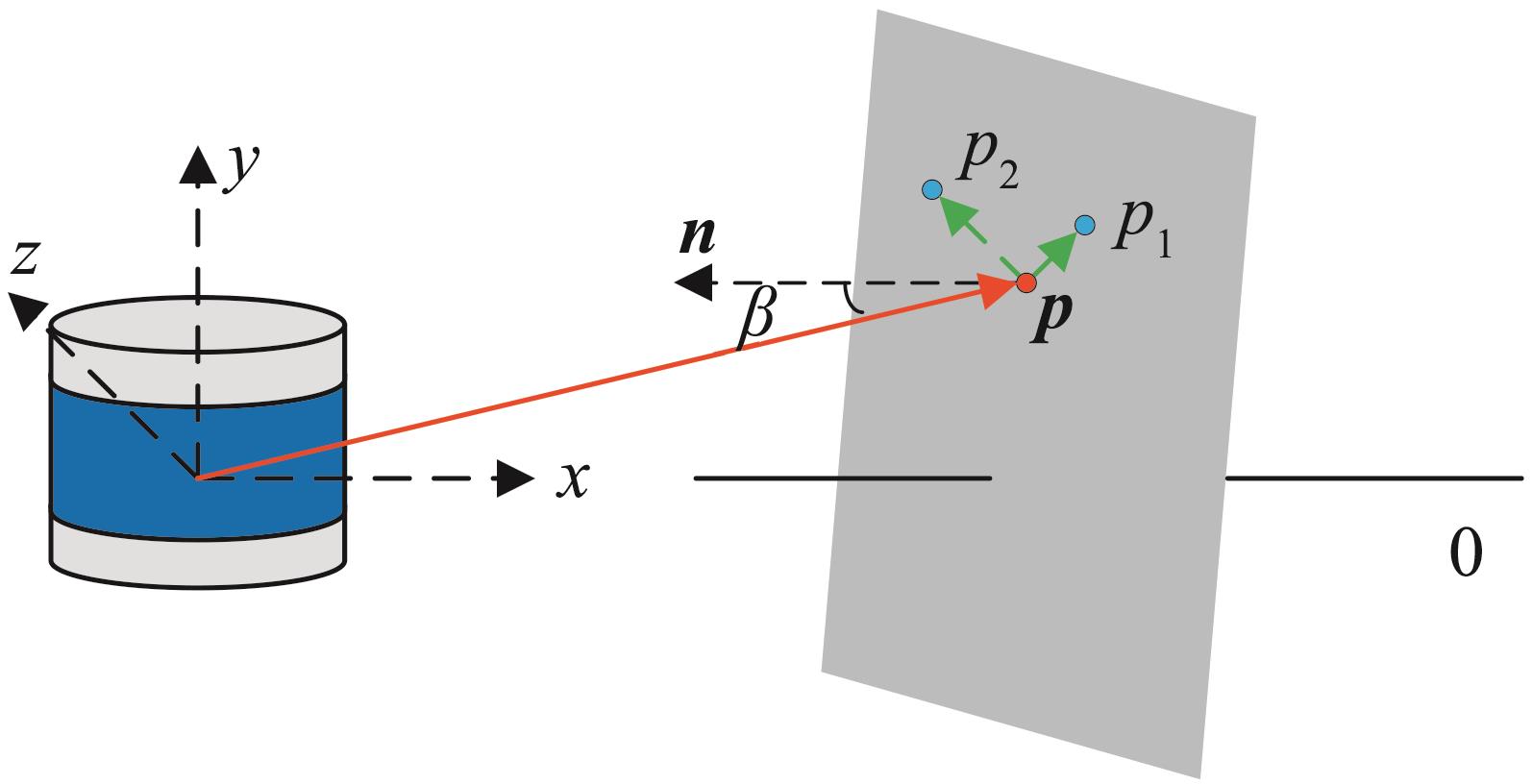
Fig. 2
Feature extraction
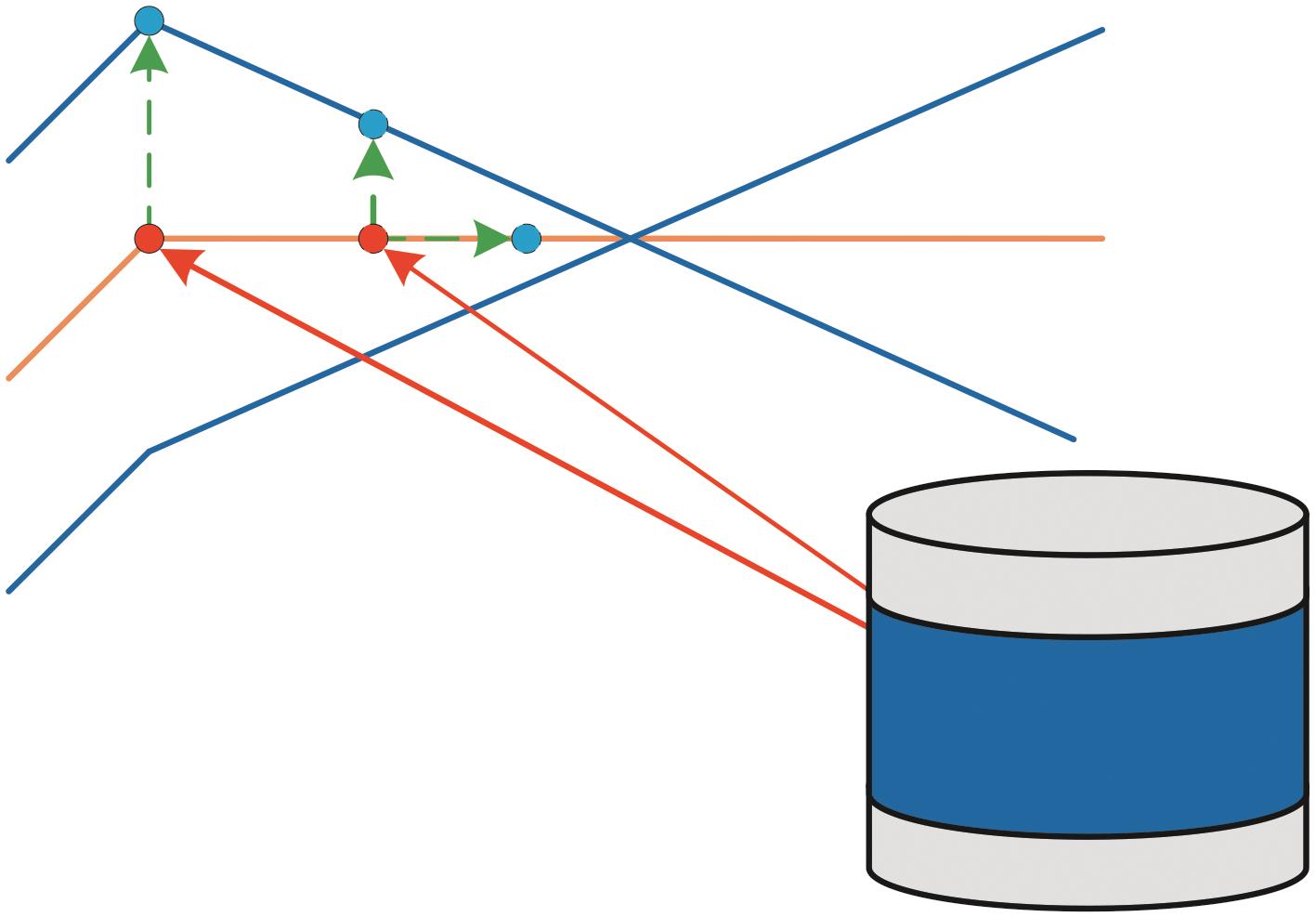
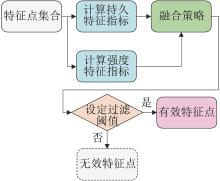
Fig. 3
Intensity feature filtering process
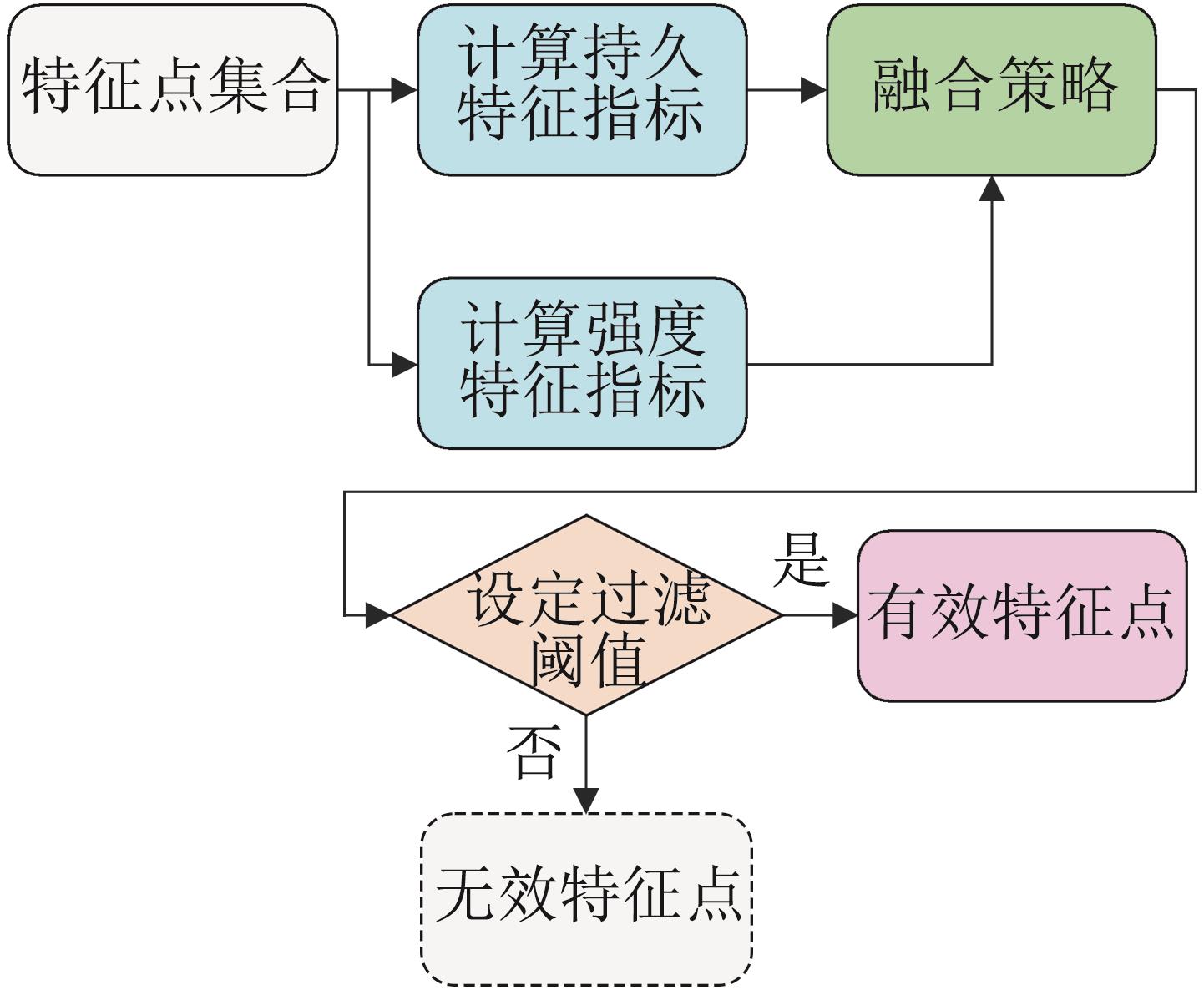
Fig. 4
Persistent feature filtering


Fig. 5
Intensity feature filtering
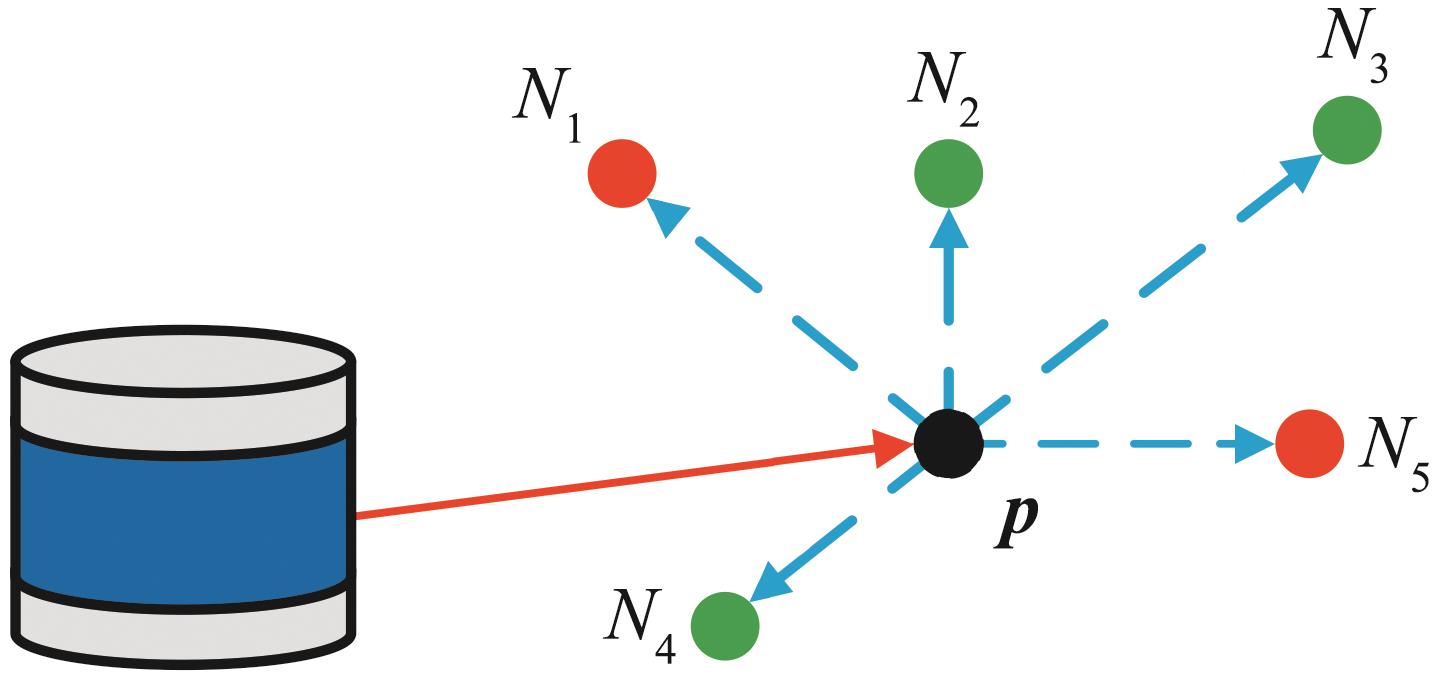
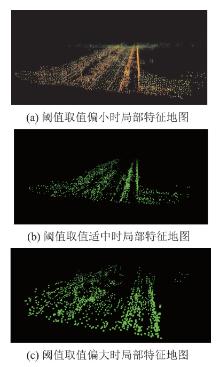
Fig. 6
Comparison of local feature maps with different threshold values
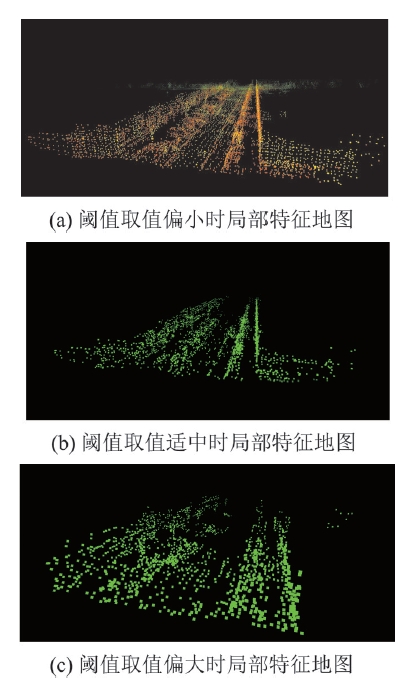
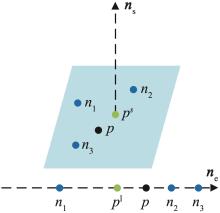
Fig. 7
Pose estimation
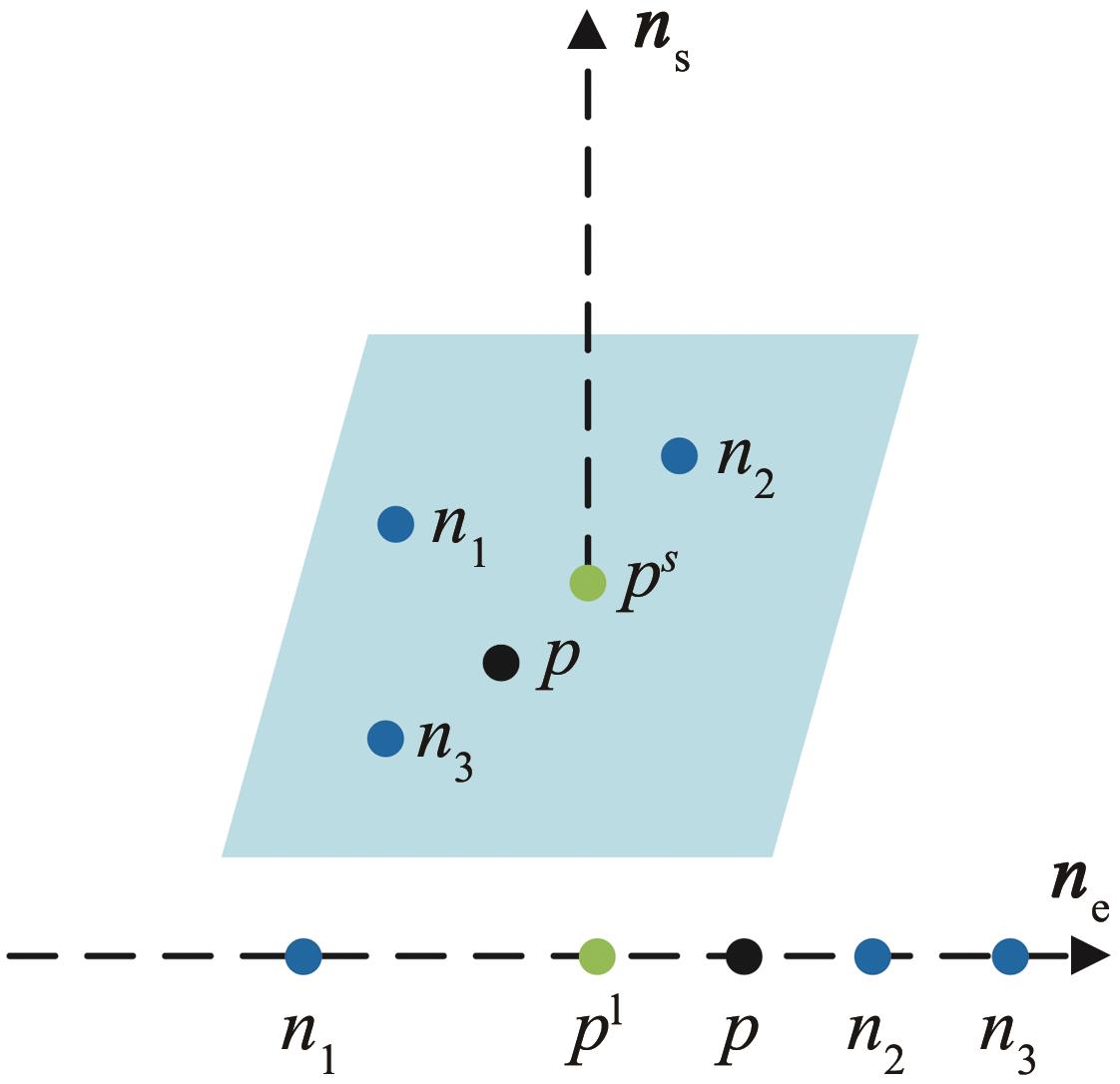
Table 1
Average number of constraints used to estimate robot's own motion
| 序号 | F-LOAM | PFilter | Δ/% | IF-LOAM | Δ/% |
|---|---|---|---|---|---|
| 平均值 | 3 391.9 | 2 707.2 | 19.3 | 2 338.8 | 30.5 |
| KITTI-00 | 2 758 | 2 340 | 15.2 | 1 884 | 31.7 |
| KITTI-01 | 4 127 | 2 538 | 38.5 | 2 231 | 45.9 |
| KITTI-02 | 2 946 | 2 481 | 15.8 | 2 102 | 28.7 |
| KITTI-03 | 3 927 | 3 083 | 21.5 | 2 678 | 31.8 |
| KITTI-04 | 3 749 | 2 957 | 21.1 | 2 541 | 32.2 |
| KITTI-05 | 3 056 | 2 557 | 16.3 | 2 173 | 28.9 |
| KITTI-06 | 4 596 | 3 657 | 20.4 | 3 248 | 29.3 |
| KITTI-07 | 2 770 | 2 378 | 14.2 | 2 059 | 25.7 |
| KITTI-08 | 3 325 | 2 635 | 20.8 | 2 296 | 31.0 |
| KITTI-09 | 3 384 | 2 757 | 18.5 | 2 417 | 28.6 |
| KITTI-10 | 2 673 | 2 396 | 10.4 | 2 097 | 21.6 |

Fig. 8
Comparison of local feature maps under different algorithms
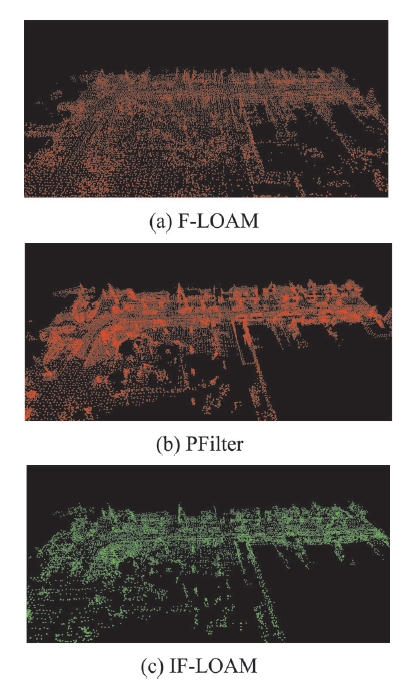
Table 2
Number of feature points in local feature map
| 序号 | F-LOAM | PFilter | Δ/% | IF-LOAM | Δ/% |
|---|---|---|---|---|---|
| 平均值 | 87 329.4 | 45053.6 | 48.4 | 36605.5 | 57.9 |
| KITTI-00 | 90 465 | 50 345 | 44.3 | 38 636 | 57.3 |
| KITTI-01 | 84 775 | 30 273 | 64.3 | 33 781 | 60.2 |
| KITTI-02 | 72 660 | 42 494 | 41.5 | 32 325 | 55.5 |
| KITTI-03 | 91 788 | 47109 | 48.7 | 38158 | 58.4 |
| KITTI-04 | 78 773 | 33086 | 58.0 | 31087 | 60.5 |
| KITTI-05 | 90 940 | 52487 | 42.3 | 39704 | 56.3 |
| KITTI-06 | 90 241 | 44861 | 50.3 | 37377 | 58.6 |
| KITTI-07 | 90 062 | 47752 | 47.0 | 38205 | 57.6 |
| KITTI-08 | 109 777 | 56327 | 48.7 | 42320 | 61.4 |
| KITTI-09 | 86 714 | 47100 | 45.7 | 36254 | 58.2 |
| KITTI-10 | 74 428 | 43756 | 41.2 | 34813 | 53.2 |

Fig. 9
Mapping results of KITTI dataset
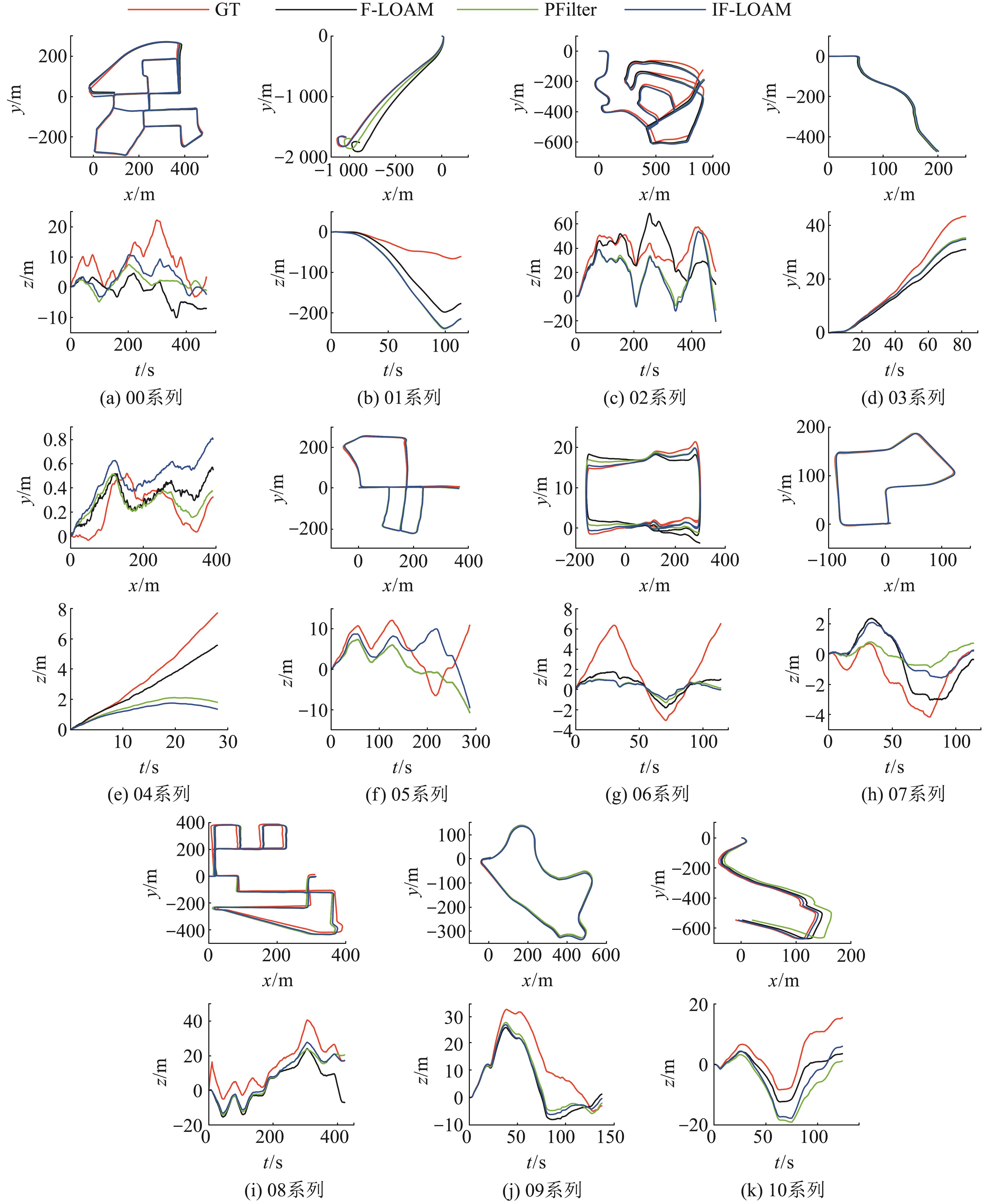
Table 3
Absolute trajectory error of LO systems on KITTI dataset
| 序号 | LOAM | LeGO-LOAM | F-LOAM | PFilter | IF-LOAM |
|---|---|---|---|---|---|
| 平均值 | 15.9 | 14.0 | 4.7 | 4.0 | 3.8 |
| KITTI-00 | 19.4 | 6.3 | 6.5 | 4.2 | 3.6 |
| KITTI-01 | 21.0 | 119.4 | 17.4 | 17.7 | 16.7 |
| KITTI-02 | 111.6 | 14.7 | 14.1 | 8.4 | 8.7 |
| KITTI-03 | 1.0 | 0.9 | 1.0 | 0.9 | 0.9 |
| KITTI-04 | 0.5 | 0.8 | 0.4 | 0.4 | 0.4 |
| KITTI-05 | 4.6 | 2.8 | 3.7 | 3.7 | 3.6 |
| KITTI-06 | 1.1 | 0.8 | 0.8 | 0.7 | 0.6 |
| KITTI-07 | 1.3 | 0.7 | 0.7 | 0.6 | 0.5 |
| KITTI-08 | 6.7 | 3.5 | 4.6 | 4.6 | 3.8 |
| KITTI-09 | 5.3 | 2.1 | 1.5 | 1.5 | 1.4 |
| KITTI-10 | 1.9 | 1.8 | 1.3 | 1.2 | 1.1 |
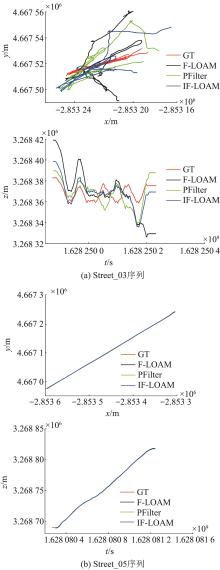
Fig. 10
Mapping results of M2DGRDataset

Table 4
Absolute trajectory error of LO systems on M2DGR dataset
| 算法 | Street_03 | Street_05 | 平均值 |
|---|---|---|---|
| F-LOAM | 32.5 | 0.5 | 16.5 |
| PFilter | 22.8 | 0.7 | 11.7 |
| IF-LOAM | 20.8 | 0.5 | 10.6 |
Table 5
Mapping results of LO systems on KITTI dataset
| NFP-SF | Δ/% | NFP-LFM | Δ/% | RMSE | |
|---|---|---|---|---|---|
| 0.5 | 1 940 | 29.7 | 39 579 | 56.2 | 4.1 |
| 1.0 | 1 922 | 30.3 | 38 665 | 57.3 | 3.9 |
| 1.25 | 1 884 | 31.7 | 38 636 | 57.3 | 3.6 |
| 1.5 | 1 857 | 32.7 | 39 245 | 56.6 | 4.3 |
| 2.0 | 1 780 | 35.5 | 41 474 | 54.2 | 4.6 |
| 1 | Cadena Cesar, Carlone L, Carrillo Henry, et al. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-perception Age[J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. |
| 2 | 薛光辉, 李瑞雪, 张钲昊, 等. 基于3D激光雷达的SLAM算法研究现状与发展趋势[J]. 信息与控制, 2023, 52(1): 18-36. |
| Xue Guanghui, Li Ruixue, Zhang Zhenghao, et al. State-of-the-art and Tendency of SLAM Algorithms Based on 3D LiDAR[J]. Information and Control, 2023, 52(1): 18-36. | |
| 3 | Zhang J, Singh S. LOAM: Lidar Odometry and Mapping in Real-time[C]//Robotics: Science and Systems, 2014, 2(9): 1-9. |
| 4 | 周治国, 曹江微, 邸顺帆. 3D激光雷达SLAM算法综述[J]. 仪器仪表学报, 2021, 41(9): 13-27. |
| Zhou Zhiguo, Cao Jiangwei, Di Shunfan. Overview of 3D Lidar SLAM Algorithms[J]. Chinese Journal of Scientific Instrument, 2021, 41(9): 13-27. | |
| 5 | Deschaud Jean-Emmanuel. IMLS-SLAM: Scan-to-model Matching Based on 3D Data[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2018: 2480-2485. |
| 6 | Lin Jiarong, Zhang Fu. Loam Livox: A Fast, Robust, High-precision LiDAR Odometry and Mapping Package for LiDARs of Small FoV[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2020: 3126-3131. |
| 7 | Chen Xieyuanli, Milioto Andres, Palazzolo Emanuele, et al. SuMa++: Efficient LiDAR-based Semantic SLAM[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2019: 4530-4537. |
| 8 | Dellenbach Pierre, Deschaud Jean-Emmanuel, Jacquet Bastien, et al. CT-ICP: Real-time Elastic LiDAR Odometry with Loop Closure[C]//2022 International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2022: 5580-5586. |
| 9 | Besl P J, Mckay N D. Method for Registration of 3-D Shapes[C]//Sensor Fusion IV: Control Paradigms and Data Structures. Bellingham: SPIE, 1992: 586-606. |
| 10 | Cattaneo Daniele, Vaghi Matteo, Valada Abhinav. LCDNet: Deep Loop Closure Detection and Point Cloud Registration for LiDAR SLAM[J]. IEEE Transactions on Robotics, 2022, 38(4): 2074-2093. |
| 11 | Segal A, Haehnel D, Thrun S. Generalized-icp[C]//Robotics: Science and Systems, 2009, 2(4): 435. |
| 12 | Koide Kenji, Yokozuka Masashi, Oishi Shuji, et al. Voxelized GICP for Fast and Accurate 3D Point Cloud Registration[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 11054-11059. |
| 13 | Wang Jikai, Xu Meng, Foroughi Farzin, et al. FasterGICP: Acceptance-rejection Sampling Based 3D Lidar Odometry[J]. IEEE Robotics and Automation Letters, 2022, 7(1): 255-262. |
| 14 | Wang Han, Wang Chen, Chen Chunlin, et al. F-LOAM: Fast LiDAR Odometry and Mapping[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2021: 4390-4396. |
| 15 | Park Y, Bae S. Keeping Less is More: Point Sparsification for Visual Slam[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2022: 7936-7943. |
| 16 | Shan Tixiao, Englot B. LeGO-LOAM: Lightweight and Ground-optimized Lidar Odometry and Mapping on Variable Terrain[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2018: 4758-4765. |
| 17 | Duan Yifan, Peng Jie, Zhang Yu, et al. PFilter: Building Persistent Maps through Feature Filtering for Fast and Accurate LiDAR-based SLAM[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2022: 11087-11093. |
| 18 | Geiger Andreas, Lenz Philip, Urtasun R. Are We Ready for Autonomous Driving? The KITTI Vision Benchmark Suite[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. |
| 19 | Wang Han, Wang Chen, Xie Lihua. Intensity-SLAM: Intensity Assisted Localization and Mapping for Large Scale Environment[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1715-1721. |
| 20 | Hess W, Kohler D, Rapp H, et al. Real-time Loop Closure in 2D LIDAR SLAM[C]//2016 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2016: 1271-1278. |
| 21 | Wang Han, Wang Chen, Xie Lihua. Intensity Scan Context: Coding Intensity and Geometry Relations for Loop Closure Detection[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2020: 2095-2101. |
| 22 | Li Haisong, Tian Bailing, Shen Hongming, et al. An Intensity-augmented LiDAR-inertial SLAM for Solid-state LiDARs in Degenerated Environments[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-10. |
| 23 | Hewitt R A, Marshall J A. Towards Intensity-augmented SLAM with LiDAR and ToF Sensors[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2015: 1956-1961. |
| 24 | Kashani A G, Olsen M J, Parrish C E, et al. A Review of LIDAR Radiometric Processing: From Ad Hoc Intensity Correction to Rigorous Radiometric Calibration[J]. Sensors, 2015, 15(11): 28099-28128. |
| 25 | 张清宇, 崔丽珍, 杜秀铎, 等. 矿山环境三维激光雷达SLAM算法建图与定位[J]. 测绘通报, 2023(5): 72-77. |
| Zhang Qingyu, Cui Lizhen, Du Xiuduo, et al. Mapping and Positioning of 3D LiDAR SLAM Algorithm in Mine Environment[J]. Bulletin of Surveying and Mapping, 2023(5): 72-77. | |
| 26 | Yuan Chongjian, Xu Wei, Liu Xiyuan, et al. Efficient and Probabilistic Adaptive Voxel Mapping for Accurate Online LiDAR Odometry[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 8518-8525. |
| 27 | Zhang Le, Ponnuthurai Nagaratnam Suganthan. Robust Visual Tracking via Co-trained Kernelized Correlation Filters[J]. Pattern Recognition, 2017, 69: 82-93. |
| 28 | Yin Jie, Li Ang, Li Tao, et al. M2DGR: A Multi-sensor and Multi-scenario SLAM Dataset for Ground Robots[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2266-2273. |
| 29 | Geiger A, Lenz P, Stiller C, et al. Vision Meets Robotics: The KITTI Dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 30 | Zhang Zichao, Scaramuzza Davide. A Tutorial on Quantitative Trajectory Evaluation for Visual(-Inertial) Odometry[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE, 2018: 7244-7251. |
| 31 | Yokozuka Masashi, Koide Kenji, Oishi Shuji, et al. LiTAMIN2: Ultra Light LiDAR-based SLAM Using Geometric Approximation Applied with KL-divergence[C]//2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2021: 11619-11625. |
| [1] | Wan Fei, Yin Yong. Large-scale Scene Registration Technology Based on 3D Gaussian Splatting Fusing GPS Prior Information [J]. Journal of System Simulation, 2026, 38(3): 563-571. |
| [2] | Lu Houjun, Zhu Yifei, Rong Yanping, Zhang Wanghui. Digital Twin Modeling Method for Bulk Cargo Stacks Based on 2D LiDAR [J]. Journal of System Simulation, 2025, 37(9): 2269-2286. |
| [3] | Cheng Chong, Wang Lixia, Duan Songtao, Xiong Xiaoguang, Ge Xianjun. Research on Obstacle Avoidance of Substation Robot Based on Spatiotemporal Networks [J]. Journal of System Simulation, 2025, 37(6): 1522-1530. |
| [4] | Du Yuanhao, Geng Xiuli, Xu Chengzhi, Liu Yinhua. Point Cloud Registration Method Based on Improved Grey Wolf Algorithm and Adaptive Splitting KD-Tree [J]. Journal of System Simulation, 2025, 37(2): 424-435. |
| [5] | Li Weigang, Gan Lei, Wang Yongqiang. Dynamic Scene Point Cloud Mapping Method Based on LiDAR-IMU [J]. Journal of System Simulation, 2025, 37(1): 95-106. |
| [6] | Wang Haichao, Yin Yong, Jing Qianfeng, Cong Lin. Estimation of the Berthing Parameter of Unmanned Surface Vessels Based on 3D LiDAR [J]. Journal of System Simulation, 2024, 36(8): 1737-1748. |
| [7] | Fu Qiang, Teng Xianyun, Ji Yuanfa, Ren Fenghua. SLAM Dynamic Algorithm Based on Improved Feature Description [J]. Journal of System Simulation, 2024, 36(11): 2712-2721. |
| [8] | Li Weigang, Yu Chuxiang, Wang Yongqiang, Zou Shaofeng. Real-time Lidar SLAM Algorithm Based on Distribution Optimal Registration [J]. Journal of System Simulation, 2024, 36(11): 2566-2577. |
| [9] | Zhiqiang Chen, Menglong Cao, Wenbin Zhao. Research on Application of Monarch Butterfly Optimization Particle Filter in SLAM [J]. Journal of System Simulation, 2023, 35(6): 1351-1361. |
| [10] | Yuan Zhang, Haoyu Han, Xie Han, Jiaxu Fu. Point Cloud Registration Method Based on Improved Covariance Matrix Descriptor [J]. Journal of System Simulation, 2023, 35(5): 979-986. |
| [11] | Tong Wang, Guangtao Shang, Shan Gao. Research on Multi-Robot SLAM Map FusionMethod Based on Heuristics [J]. Journal of System Simulation, 2022, 34(7): 1449-1458. |
| [12] | Xuesong Mao, Runlong Lei, Shaowei Huang, Xuetao Mao. Simulation on Mutual Interference of Laser Radar in Road Environments [J]. Journal of System Simulation, 2022, 34(4): 891-900. |
| [13] | Liu Ruijun, Wang Xiangshang, Zhang Chen, Zhang Bohua. A Survey on Visual SLAM based on Deep Learning [J]. Journal of System Simulation, 2020, 32(7): 1244-1256. |
| [14] | Sun Shuifa, Li Zhun, Xia Kun, Shi Yunfei, Yang Jiquan, Dong Fangmin. Variable Scale Point Cloud Registration Algorithm [J]. Journal of System Simulation, 2018, 30(7): 2465-2474. |
| [15] | Zhang Yanguo, Li Qing. Multi-frame Fusion Method for Point Cloud of LiDAR Based on IMU [J]. Journal of System Simulation, 2018, 30(11): 4334-4339. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
