

Journal of System Simulation ›› 2025, Vol. 37 ›› Issue (6): 1522-1530.doi: 10.16182/j.issn1004731x.joss.24-0081
• Papers • Previous Articles Next Articles
Cheng Chong1, Wang Lixia1, Duan Songtao1, Xiong Xiaoguang1, Ge Xianjun2
Received:2024-01-19
Revised:2024-02-07
Online:2025-06-20
Published:2025-06-18
CLC Number:
Cheng Chong, Wang Lixia, Duan Songtao, Xiong Xiaoguang, Ge Xianjun. Research on Obstacle Avoidance of Substation Robot Based on Spatiotemporal Networks[J]. Journal of System Simulation, 2025, 37(6): 1522-1530.
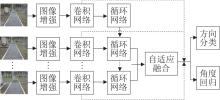
Fig. 1
Overall structure of spatiotemporal network
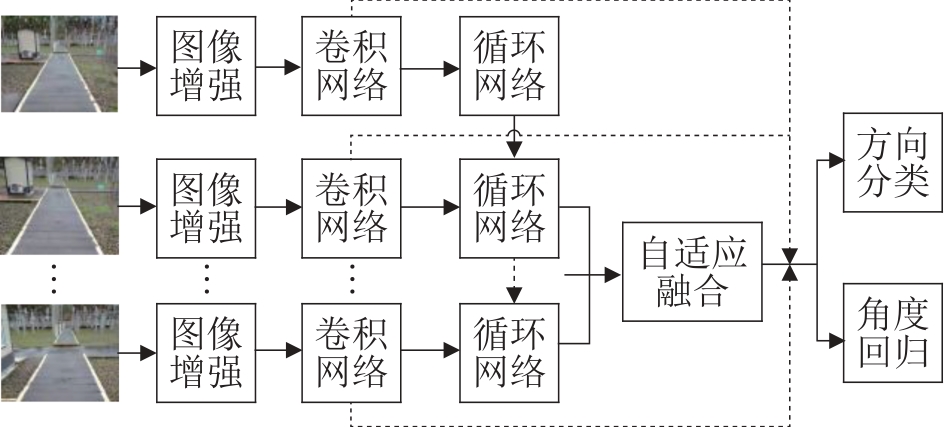

Fig.2
Spatial feature extraction structure
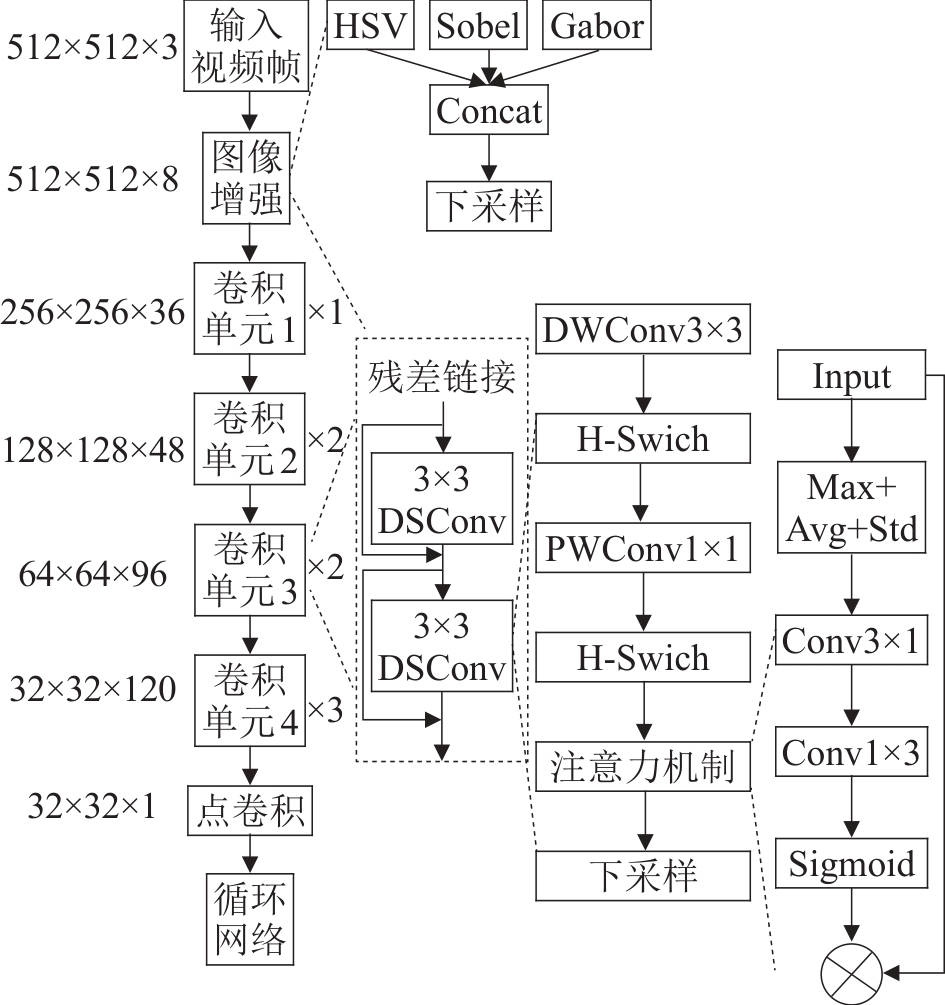
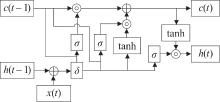
Fig. 3
Temporal domain feature extraction structure
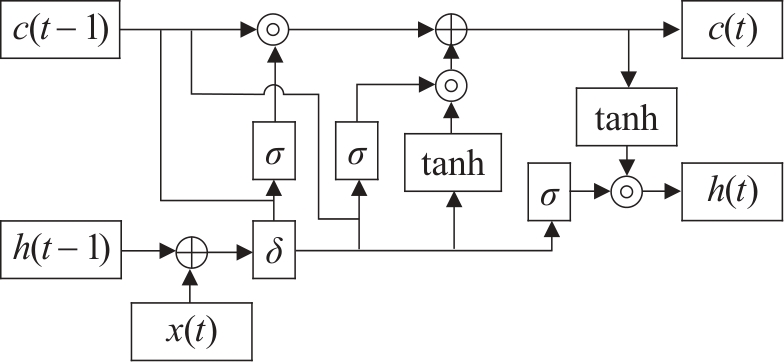
Fig. 4
Classification regression prediction structure
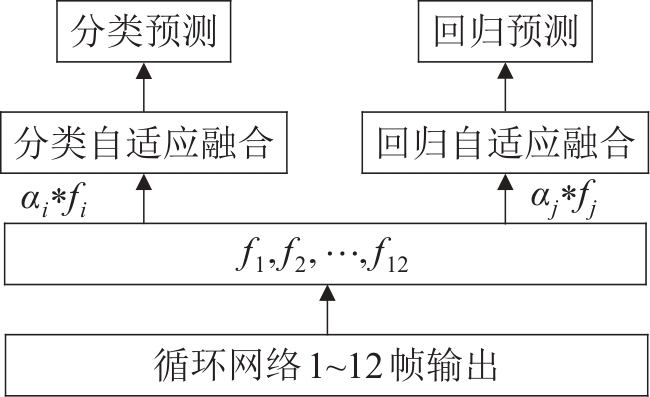
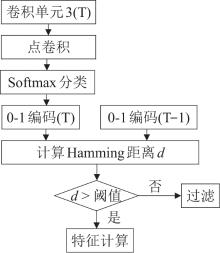
Fig. 5
Redundant feature filtering process
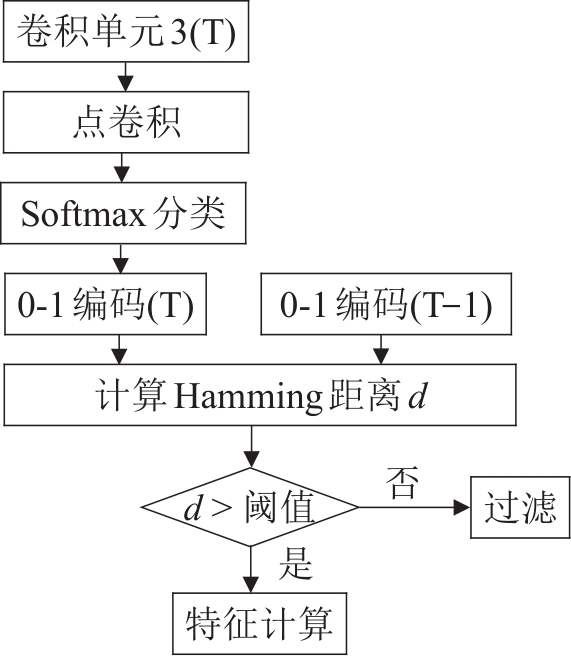
Table 1
Composition of training and testing datasets
| 数据集 | 数量 | 类别数 | 大小/像素 |
|---|---|---|---|
| CamVid | 701 | 2 | 360×480 |
| Mnist | 10 000 | 100 | 28×28 |
| MovingMnist | 1 000 | — | 448×448 |
| RobotData | 6 000 | 4 | 512×512 |
Table 2
Hyperparameter value setting
| 超参数 | 参数赋值 |
|---|---|
| 优化策略 | SGD |
| 学习策略 | step |
| 初始学习率 | 0.01 |
| 动量参数 | 0.9 |
| 权重衰减系数 | 0.005 |
| 分类损失函数 | SoftMaxLoss |
| 回归损失函数 | MeanSquaredLoss |
Table 3
Image enhancement structure test
| RGB | HSV | Sobel | Gabor | G/% | U/% | V/(帧/s) |
|---|---|---|---|---|---|---|
| √ | 91.1 | 83.3 | 25 | |||
| √ | √ | 91.6 | 83.5 | 25 | ||
| √ | √ | √ | 91.8 | 83.8 | 24 | |
| √ | √ | √ | √ | 92.3 | 84.2 | 24 |
Table 4
Convolutional network structure testing
| 网络 | G/% | U/% | V/(帧/s) |
|---|---|---|---|
| MobileNet[ | 92.3 | 84.2 | 24 |
| EfficientNet[ | 92.8 | 84.6 | 22 |
| GhostNet[ | 93.1 | 84.8 | 21 |
| 基础网络 | 90.6 | 82.3 | 33 |
| 基础+残差 | 91.2 | 82.8 | 32 |
| 基础+残差+注意力 | 91.7 | 83.7 | 31 |
Table 5
Rerrent neural network structure testing
| 网络 | R | P/% | V/(帧/s) |
|---|---|---|---|
| LSTM | 1.8 | — | 64 |
| LSTM+自注意力 | 1.6 | — | 63 |
| LSTM+自注意力+分类 | 1.6 | 95.6 | 63 |
| LSTM+自注意力+分类+特征加权 | 1.3 | 96.2 | 61 |

Fig. 6
Fusion of different frame rates for testing effectiveness
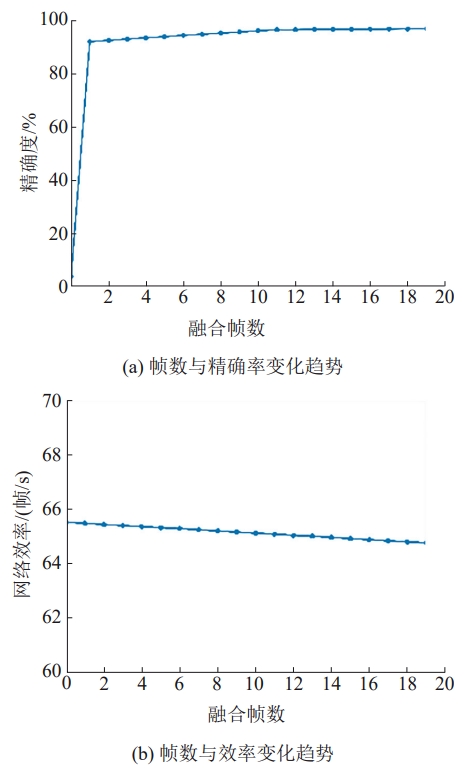
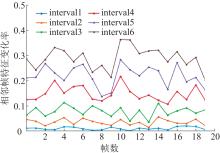
Fig. 7
Frame difference variation at different intervals
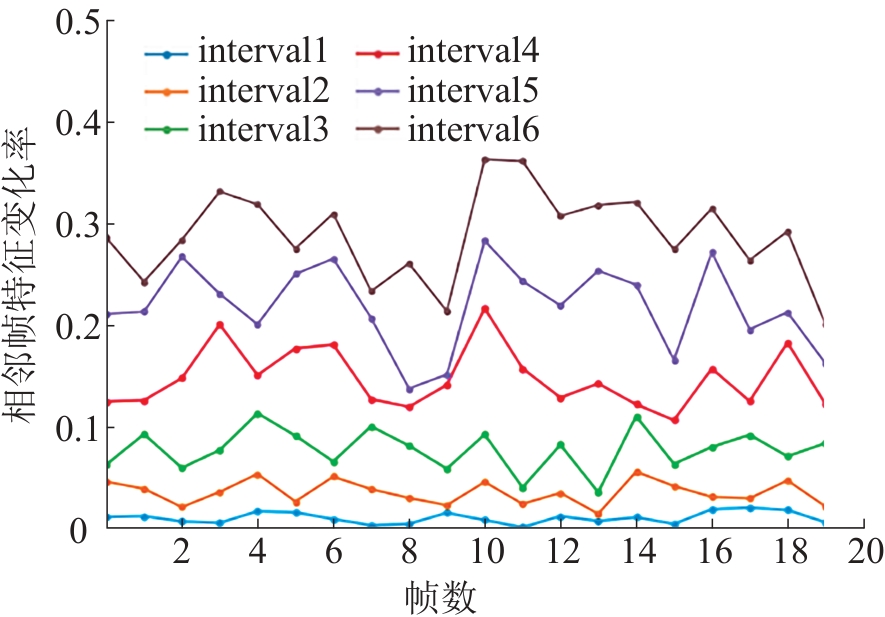
Table 6
Feature filtering structure testing
| 网络 | P/% | V/(帧/s) |
|---|---|---|
| 引入前 | 96.0 | 26 |
| 引入后 | 95.8 | 34 |
Table 7
Comparison of substation dataset testing
| 网络 | P/% | V/(帧/s) |
|---|---|---|
| 文献[ | 93.6 | 30 |
| 文献[ | 94.2 | 28 |
| 文献[ | 95.7 | 27 |
| 本文 | 98.0 | 24 |
Table 8
Comparison of navigation obstacle avoidance performance under different obstacles
| 方法 | 无障碍物 | 单个障碍物 | 多个障碍物 |
|---|---|---|---|
| 文献[ | 36 | 43 | 53 |
| 文献[ | 35 | 40 | 48 |
| 文献[ | 37 | 41 | 46 |
| 本文 | 35 | 36 | 38 |
| 1 | 张培. 智能变电站巡检机器人的应用[J]. 现代制造技术与装备, 2022, 58(6): 222-224. |
| Zhang Pei. Briefly Analyze the Application of Intelligent Substation Inspection Robot[J]. Modern Manufacturing Technology and Equipment, 2022, 58(6): 222-224. | |
| 2 | Dong Lijun, Chen Naichao, Liang Jiawen, et al. A Review of Indoor-orbital Electrical Inspection Robots in Substations[J]. Industrial Robot, 2023, 50(2): 337-352. |
| 3 | 毛建旭, 贺振宇, 王耀南, 等. 电力巡检机器人路径规划技术及应用综述[J]. 控制与决策, 2023, 38(11): 3009-3024. |
| Mao Jianxu, He Zhenyu, Wang Yaonan, et al. Review of Research and Applications on Path Planning Technology for Power Inspection Robots[J]. Control and Decision, 2023, 38(11): 3009-3024. | |
| 4 | 唐昀超, 祁少军, 朱立学, 等. 移动机器人避障运动研究[J]. 系统仿真学报, 2024, 36(1): 1-26. |
| Tang Yunchao, Qi Shaojun, Zhu Lixue, et al. Obstacle Avoidance Motion in Mobile Robotics[J]. Journal of System Simulation, 2024, 36(1): 1-26. | |
| 5 | Wang Lei, Yuan Luhai, Zhang Xin. Research on Navigation and Control Method for Inspection Robot in Smart Substation[J]. Journal of Physics: Conference Series, 2022, 2330(1): 012014. |
| 6 | 黄绪勇, 王欣, 唐标, 等. 基于改进人工势场法的电力巡检机器人自动避障轨迹规划[J]. 机械与电子, 2023, 41(4): 22-25, 30. |
| Huang Xuyong, Wang Xin, Tang Biao, et al. Automatic Obstacle Avoidance Trajectory Planning for Power Inspection Robot Based on Improved Artificial Potential Field Method[J]. Machinery & Electronics, 2023, 41(4): 22-25, 30. | |
| 7 | 何少华. 变电站巡检机器人复合导航与路径规划系统的设计[D]. 哈尔滨: 哈尔滨理工大学, 2023. |
| He Shaohua. Design of Compound Navigation and Path Planning System for Substation Inspection Robot[D]. Harbin: Harbin University of Science and Technology, 2023. | |
| 8 | Green J, Clounie J, Galarza R, et al. Optimization of an Intelligent Wheelchair: LiDAR and Camera Vision for Obstacle Avoidance[C]//2022 22nd International Conference on Control, Automation and Systems (ICCAS). Piscataway: IEEE, 2022: 313-318. |
| 9 | Hu Kewei, Chen Zheng, Kang Hanwen, et al. 3D Vision Technologies for a Self-developed Structural External Crack Damage Recognition Robot[J]. Automation in Construction, 2024, 159: 105262. |
| 10 | 鲜开义, 彭志远, 谷湘煜, 等. 变电站巡检机器人避障方法研究与应用[J]. 科学技术与工程, 2021, 21(5): 1957-1962. |
| Xian Kaiyi, Peng Zhiyuan, Gu Xiangyu, et al. Research and Application of Obstacle Avoidance Method for Substation Inspection Robot[J]. Science Technology and Engineering, 2021, 21(5): 1957-1962. | |
| 11 | 王志辉, 陈息坤. 融合场景理解与A*算法的巡检机器人避障设计[J]. 无线电工程, 2022, 52(11): 2000-2008. |
| Wang Zhihui, Chen Xikun. Obstacle Avoidance Design of Inspection Robot Based on Scene Understanding and A* Algorithm[J]. Radio Engineering, 2022, 52(11): 2000-2008. | |
| 12 | Venkat Raman Nagarajan, Singh Pavan. Obstacle Detection and Avoidance for Mobile Robots Using Monocular Vision[C]//2021 8th International Conference on Smart Computing and Communications (ICSCC). Piscataway: IEEE, 2021: 275-279. |
| 13 | Li Yong, Liu Yuzhe. Vision-based Obstacle Avoidance Algorithm for Mobile Robot[C]//2020 Chinese Automation Congress (CAC). Piscataway: IEEE, 2020: 1273-1278. |
| 14 | Shi Xingjian, Chen Zhourong, Wang Hao, et al. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting[EB/OL]. (2015-09-19) [2023-11-21]. . |
| 15 | Wang Xiaolong, Girshick R, Gupta A, et al. Non-local Neural Networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7794-7803. |
| 16 | Howard A, Sandler M, Chen Bo, et al. Searching for MobileNetV3[C]//2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2019: 1314-1324. |
| 17 | Tan Mingxing, Le Q. EfficientNetV2: Smaller Models and Faster Training[C]//Proceedings of the 38th International Conference on Machine Learning. Chia Laguna Resort: PMLR, 2021: 10096-10106. |
| 18 | Tang Yehui, Han Kai, Guo Jianyuan, et al. GhostNetV2: Enhance Cheap Operation with Long-range Attention[EB/OL]. (2022-11-23) [2023-11-27]. . |
| [1] | Fan Shuanghao, He Fang, Zhao Jianwei, Hu Haojie, Zhu Fengchao, Li Xiangyang. Hyperspectral Anomaly Detection Algorithm Based on Window Reconstruction and Collaborative Representation [J]. Journal of System Simulation, 2026, 38(5): 1440-1452. |
| [2] | Zou Changjun, Ge Zhiyu, Zhong Chenxi. Spatio-temporal Swin Transformer-based Flow-solid Coupling Interaction Sequence Image Prediction Network [J]. Journal of System Simulation, 2026, 38(1): 112-124. |
| [3] | Liao Guoqiong, Huang Longjie, Li Qingxin, Zhang Jiajun, Chen Kefan. DEHPR: A Diffusion-based End-to-end Hand Pose Reconstruction Network [J]. Journal of System Simulation, 2026, 38(1): 174-188. |
| [4] | Zhu He, Zhou Feng, Zhang Qi, Zhu Mengxiao, Dai Ju. PL-Mamba: A 3D Point Cloud Semantic Segmentation Network Based on Bimodal Fusion [J]. Journal of System Simulation, 2026, 38(1): 73-83. |
| [5] | Wu Shuheng, Liu Yongkui, Zhang Lin, Xiao Yingying, Wang Lihui. Lightweight Assembly Workpiece Detection Algorithm Based on Improved YOLOv8 [J]. Journal of System Simulation, 2025, 37(12): 3099-3111. |
| [6] | Chen Na, Bai Jiajia, Zhou Qiyin, Li Jialin. Image Feature Point Matching Algorithm Based on Attention and Hierarchical Features [J]. Journal of System Simulation, 2025, 37(11): 2839-2852. |
| [7] | Lu Bin, Yang Xuan, Yang Zhenyu, Gao Xiaotian. Adaptive Sampling and Ghost Multi-scale Fusion for Lightweight Weld Defect Detection [J]. Journal of System Simulation, 2025, 37(8): 1978-1990. |
| [8] | Shao Xuqiang, Cheng Ya, Jin Yizhong. 3D Streamline Visualization Method Based on Clustering Fusion [J]. Journal of System Simulation, 2024, 36(3): 625-635. |
| [9] | Zhang Fengquan, Cao Duo, Ma Xiaohan, Chen Baijun, Zhang Jiangxiao. Style Transfer Network for Generating Opera Makeup Details [J]. Journal of System Simulation, 2023, 35(9): 2064-2076. |
| [10] | Chen Yuanyuan, Huai Yongjian, Nie Xiaoying, Lang Ke. 3D Garment Collision Simulation Based on Human Skeletal Features [J]. Journal of System Simulation, 2023, 35(9): 2023-2034. |
| [11] | Benyue Su, Manzhen Sun, Qing Ma, Min Sheng. Action Recognition Method Based on Projection Subspace Views under Single Viewing Angle [J]. Journal of System Simulation, 2023, 35(5): 1098-1108. |
| [12] | Yecai Guo, Cheng Liu. Adaptive Correction Tracking Algorithm Based on Detector and Locator Fusion [J]. Journal of System Simulation, 2023, 35(4): 709-720. |
| [13] | Yaru Wang, Kai Yang, Yongjie Zhai, Congbin Guo, Wenqing Zhao, Jie Su. Transmission Line Insulator Recognition Based on Artificial Images Data Expansion [J]. Journal of System Simulation, 2022, 34(11): 2337-2347. |
| [14] | Xiaojuan Ning, Jieru Li, Fan Gao, Yinghui Wang. Feature Matching Algorithm Based on Optimal Geometric Constraints and RANSAC [J]. Journal of System Simulation, 2022, 34(4): 727-734. |
| [15] | Jinghui Yang, Dekang Liu, Wanhe Du, Lining Xing. Research on Binocular Ranging System Based on Image Features [J]. Journal of System Simulation, 2022, 34(3): 624-632. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
