

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (2): 408-422.doi: 10.16182/j.issn1004731x.joss.21-0947
• Papers • Previous Articles Next Articles
Guohui Zhang( ), Xuan Wang, Yanan Zhang, Ang Gao()
), Xuan Wang, Yanan Zhang, Ang Gao()
Received:2021-09-14
Revised:2021-12-10
Online:2023-02-28
Published:2023-02-16
Contact:
Ang Gao
E-mail:zgh8002@126.com;236211566@qq.com
CLC Number:
Guohui Zhang, Xuan Wang, Yanan Zhang, Ang Gao. Research on Cooperative Path Planning Model of Multiple Unmanned Vehicles in Real Environment[J]. Journal of System Simulation, 2023, 35(2): 408-422.
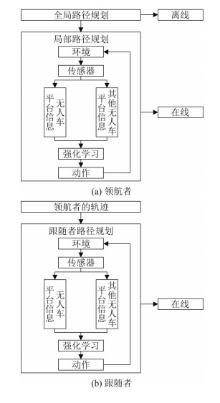
Fig. 1
Path planning model
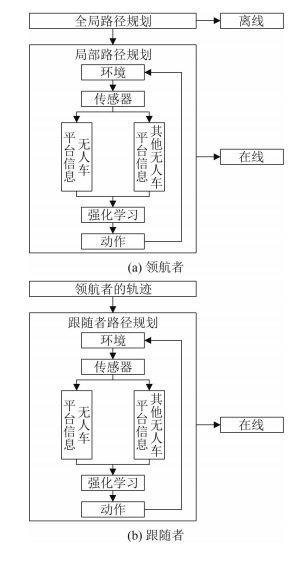
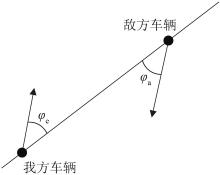
Fig. 2
Diagram of entry angle and azimuth definition
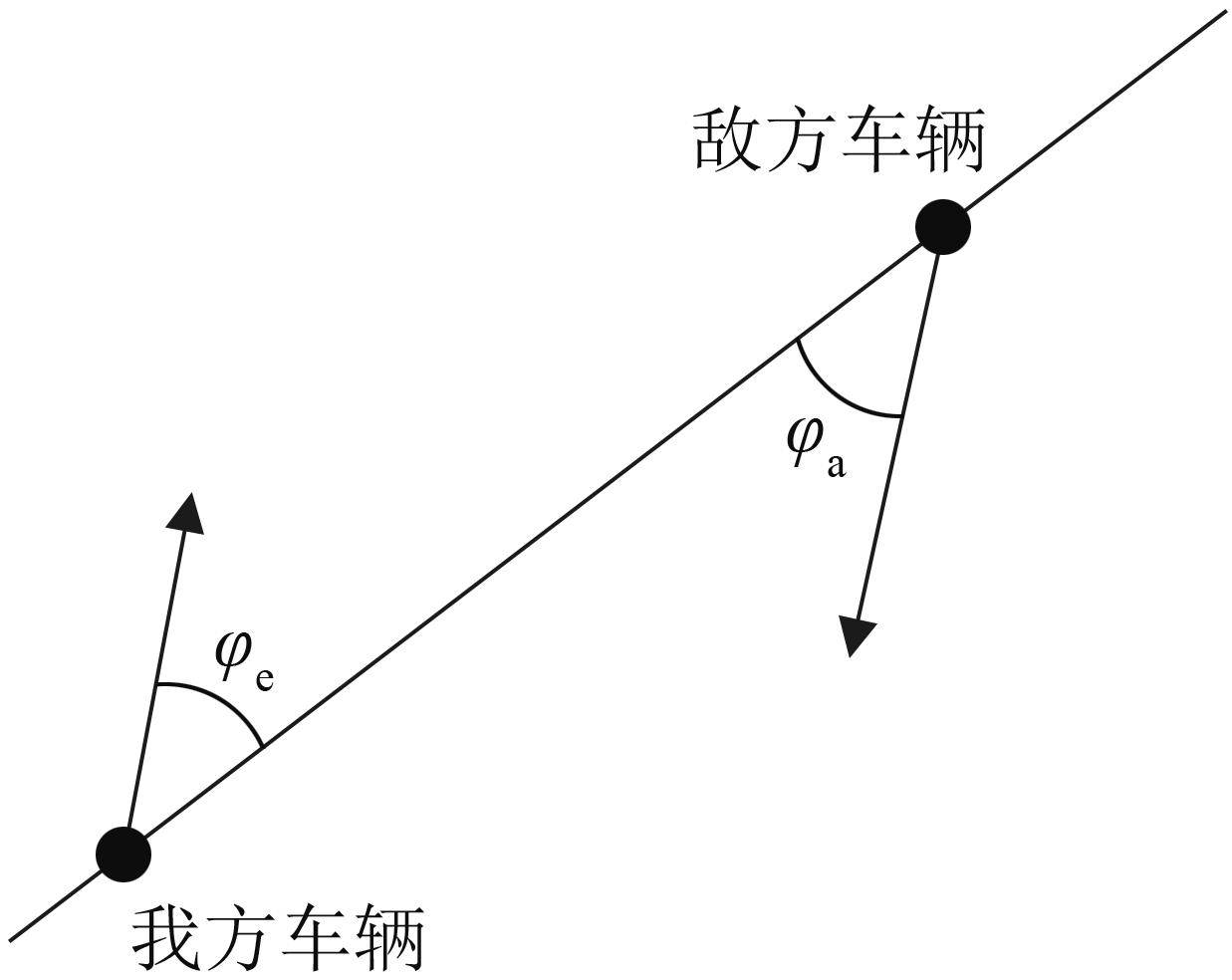
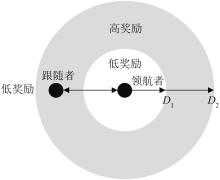
Fig. 3
Reward diagram of distance between leader and follower
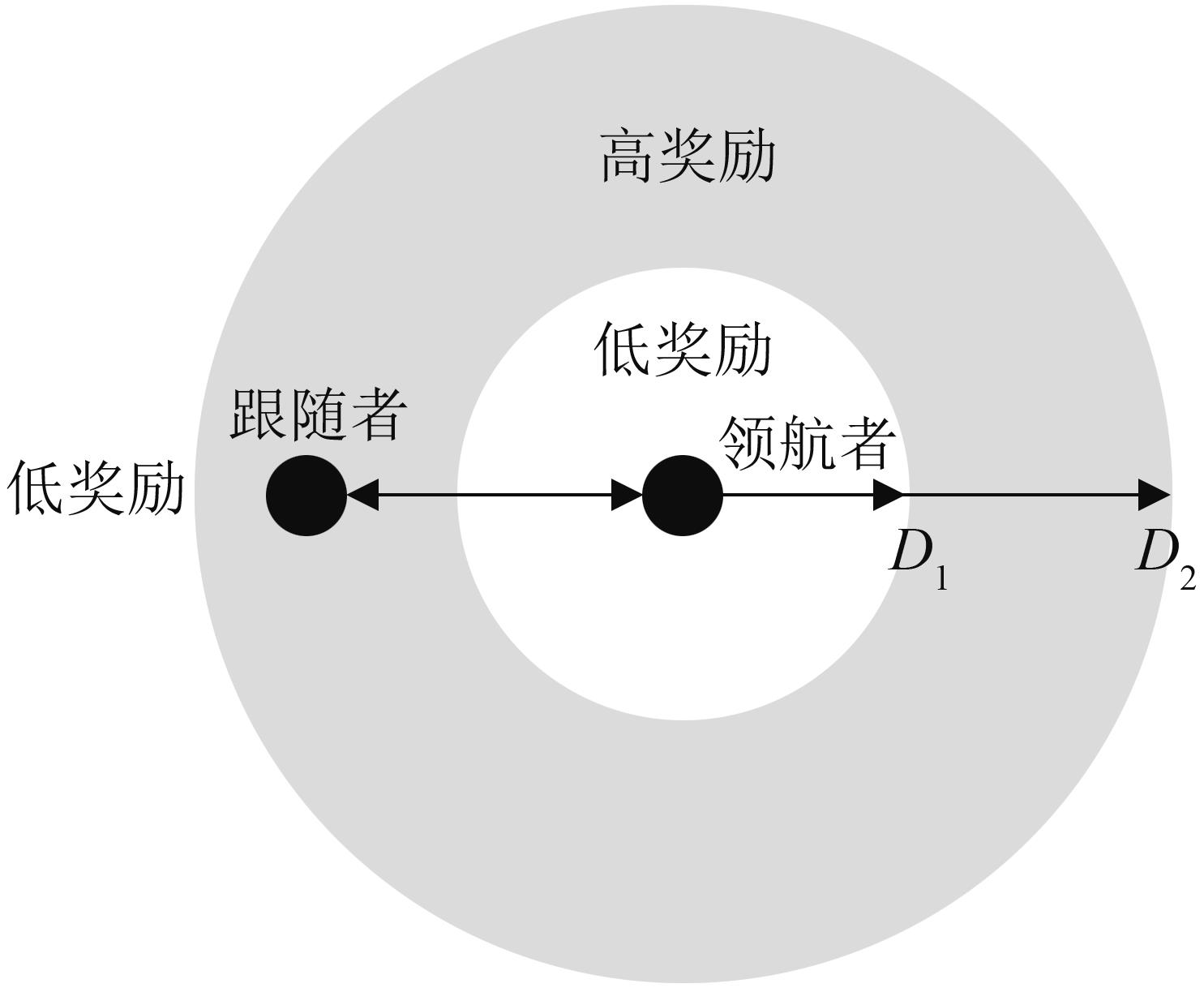
Fig. 4
Selection of follower position under triangular formation
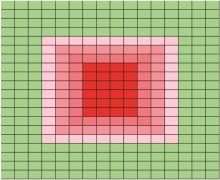
Fig. 5
Artificial potential field of obstacle
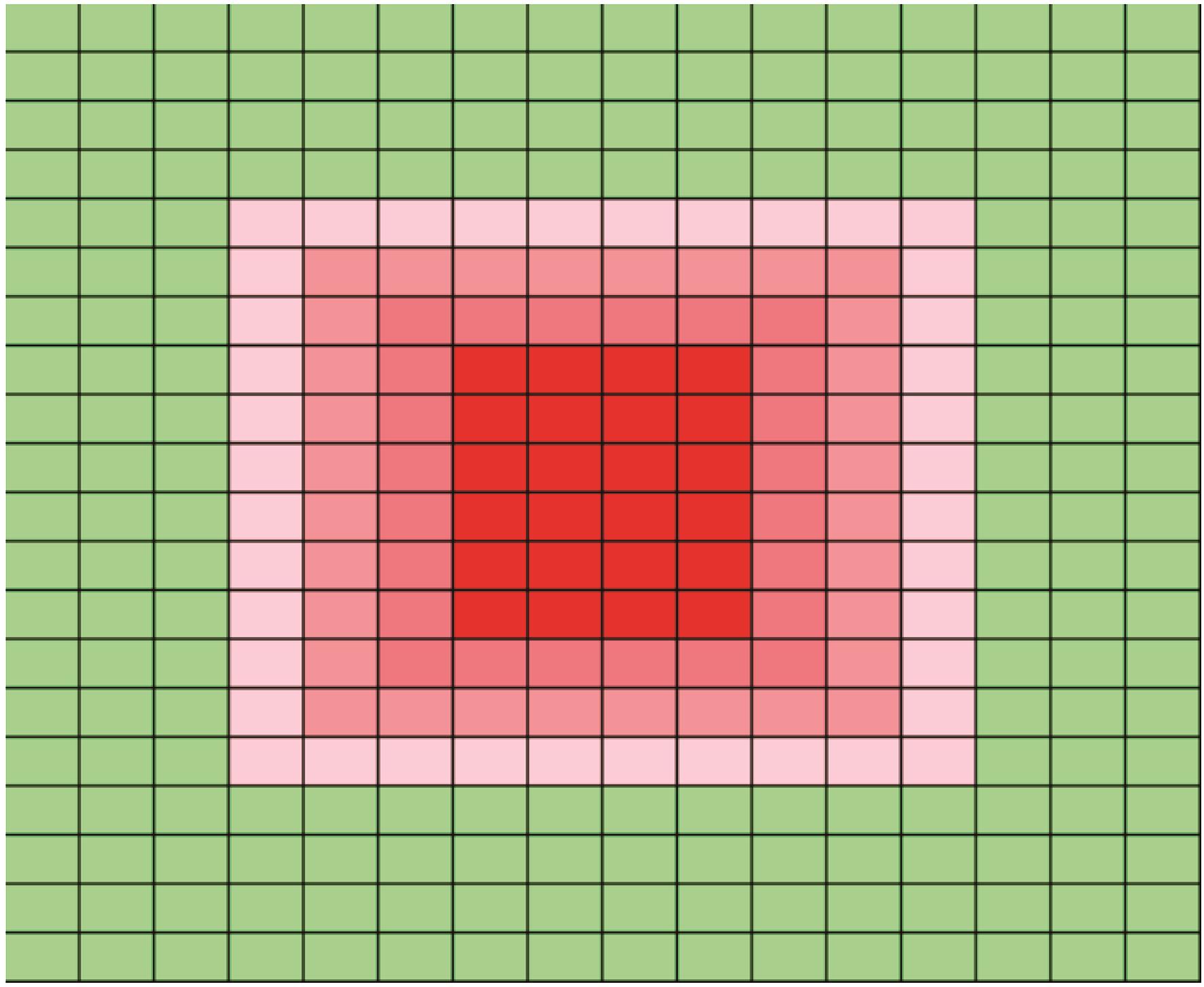
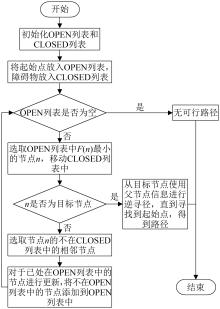
Fig. 6
Flow chart of global path planning algorithm
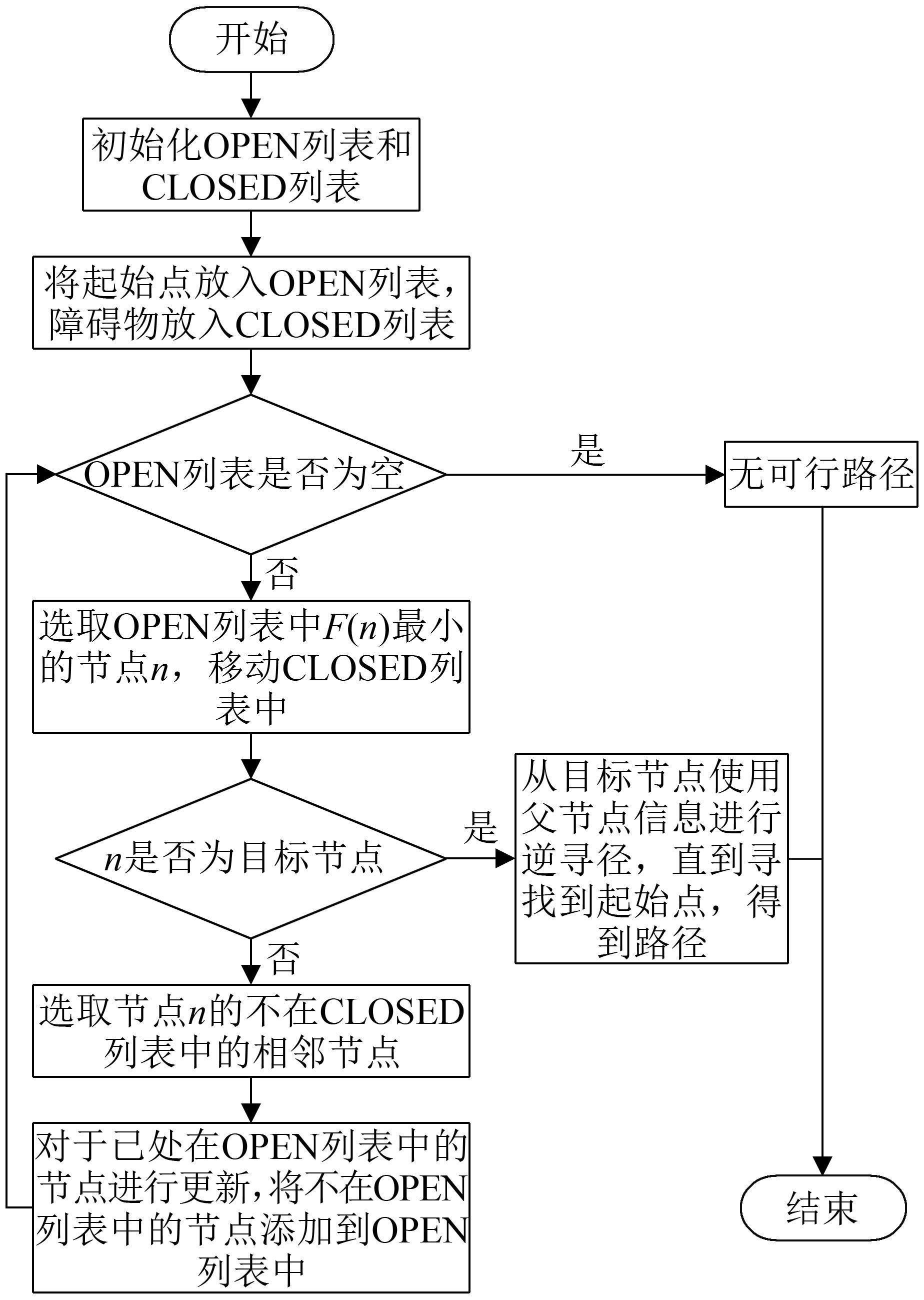
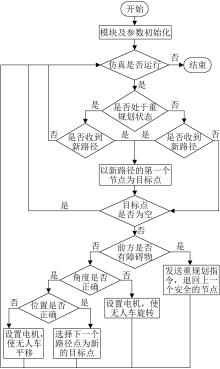
Fig. 7
Controller flow chart
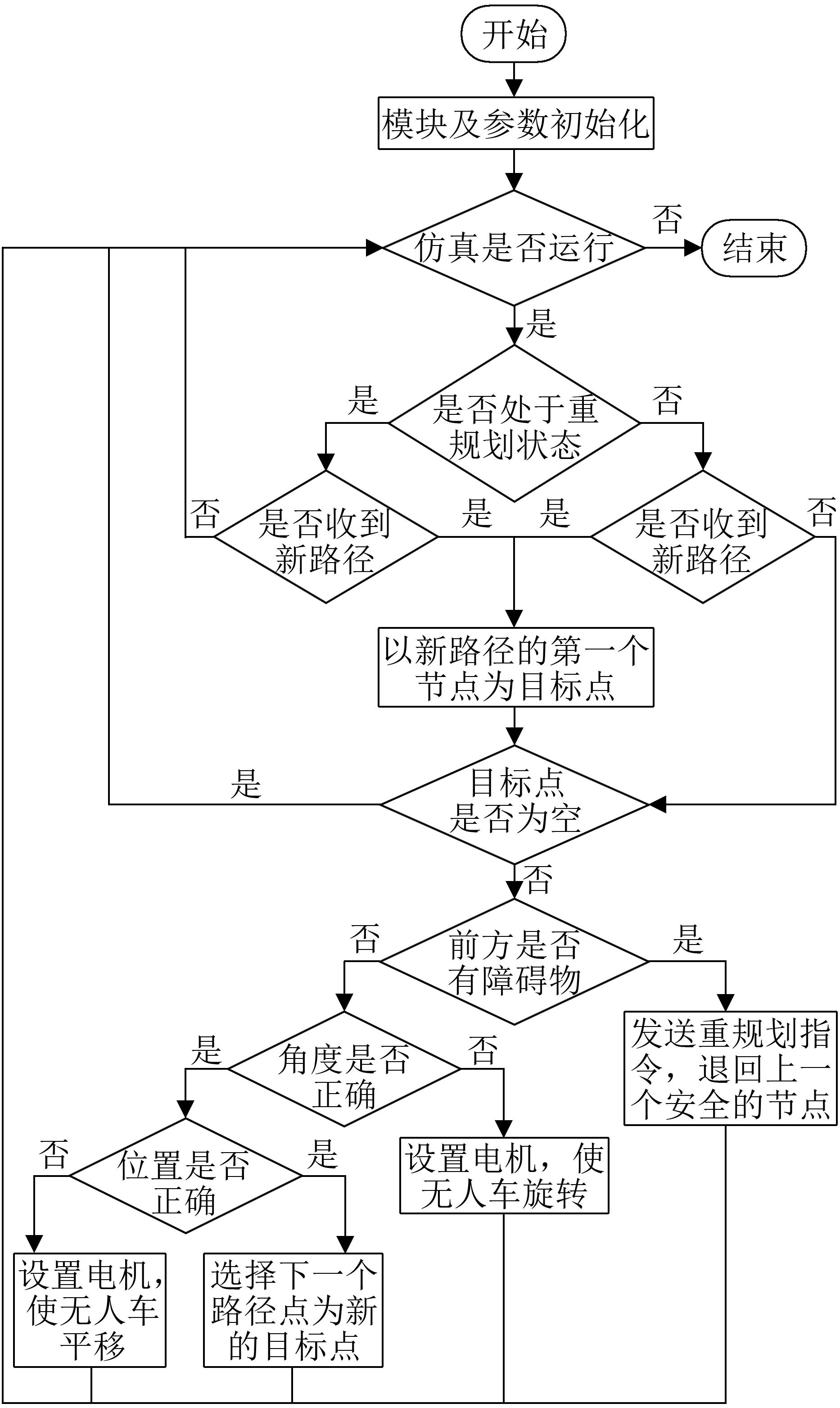
Fig. 8
Overall design of unmanned vehicle formation
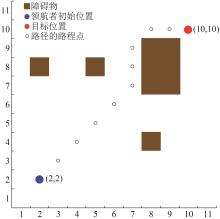
Fig. 9
The first initial condition and its global path planning
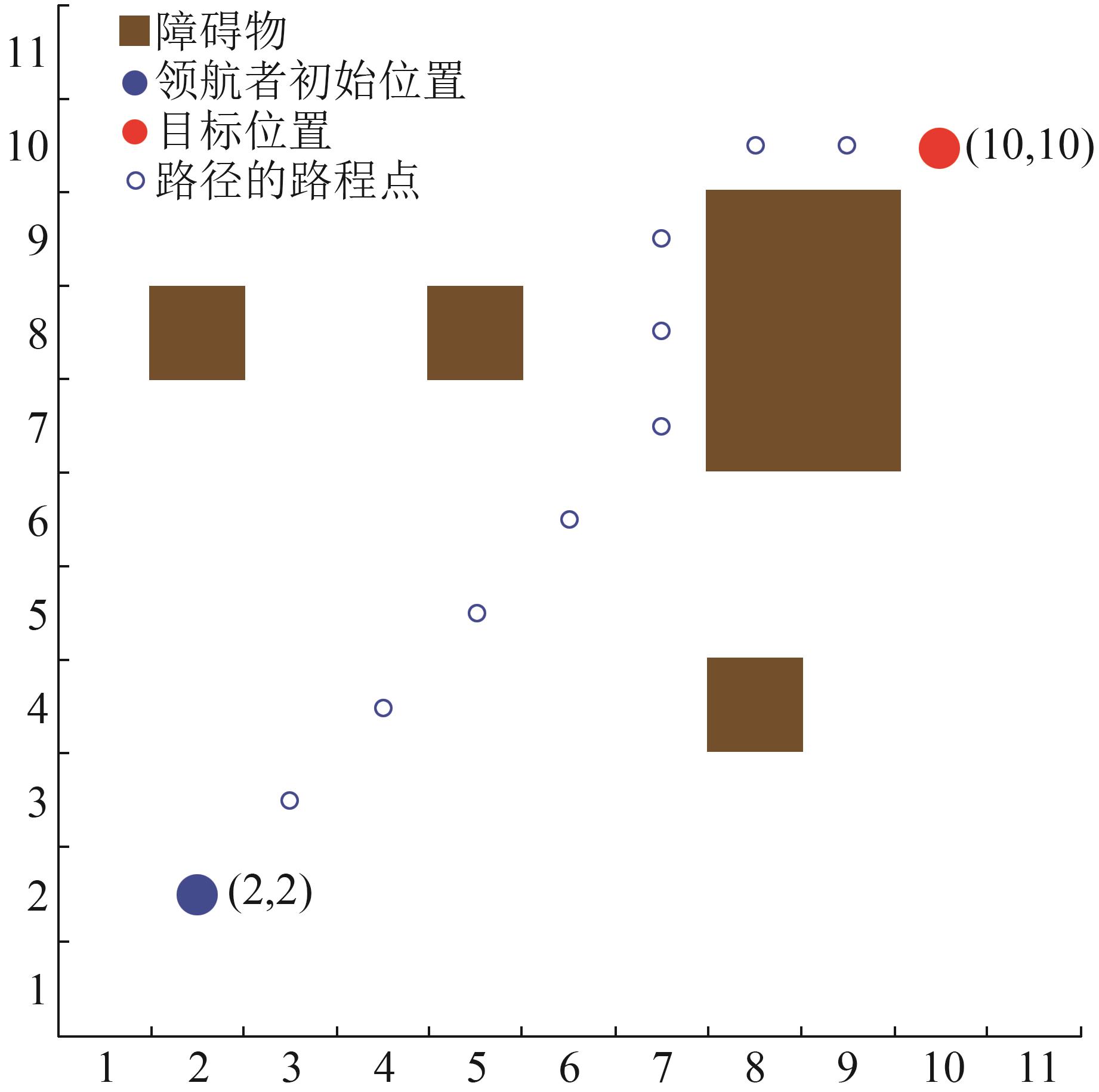
Table 1
Experimental parameter design
| 参数 | 数值 |
|---|---|
| 学习率 | 0.5 |
| 折扣因子 | 0.2 |
| 探索率 | 0.1 |
| 探索率调整因子 | 0.005 |
| 最大迭代次数 | 500 |
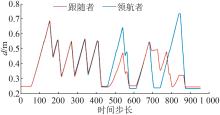
Fig. 10
Graph of distance variation between leader and follower under the first initial condition
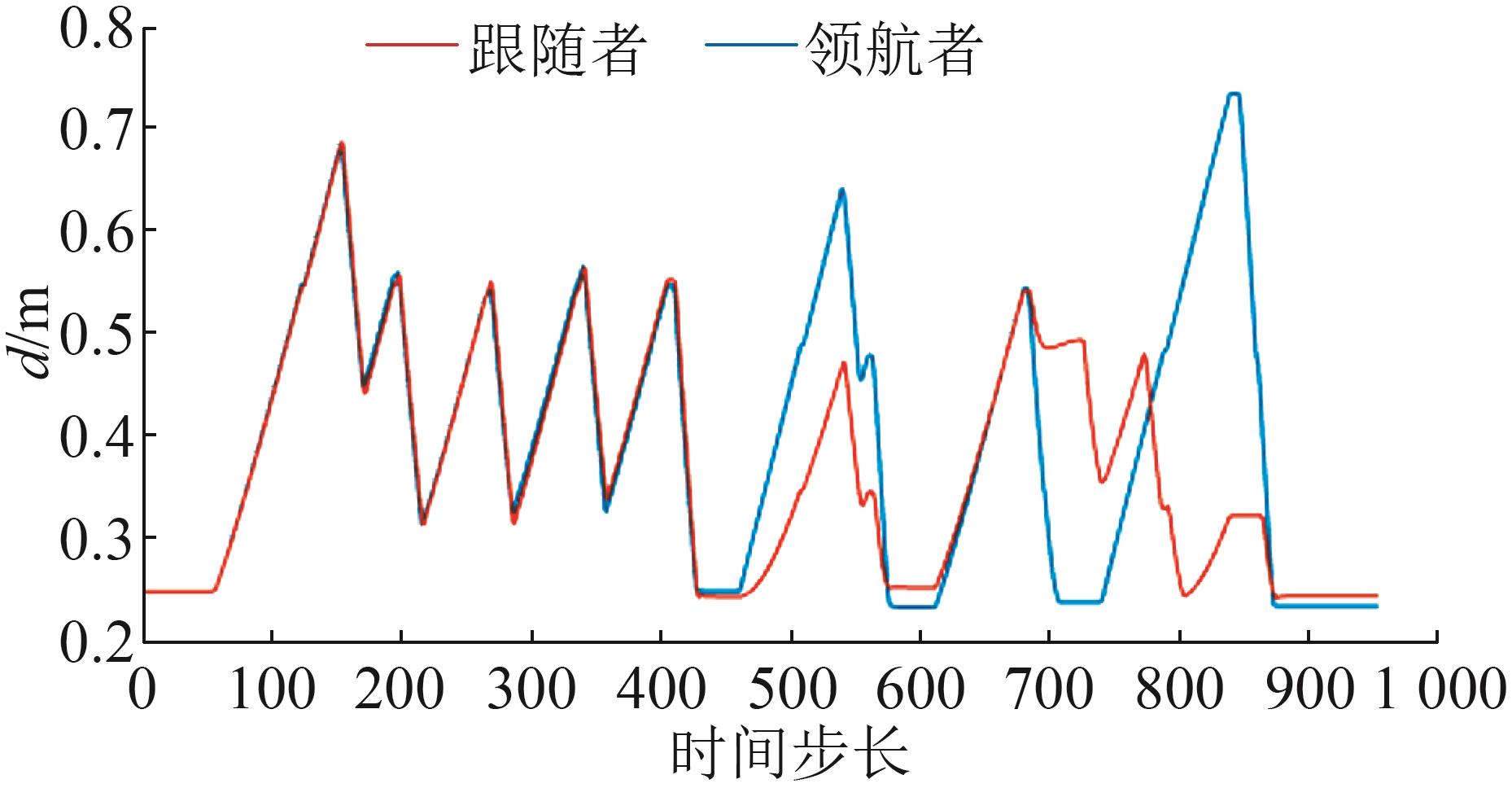
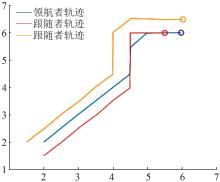
Fig. 11
Trajectory of unmanned vehicle under the first initial condition
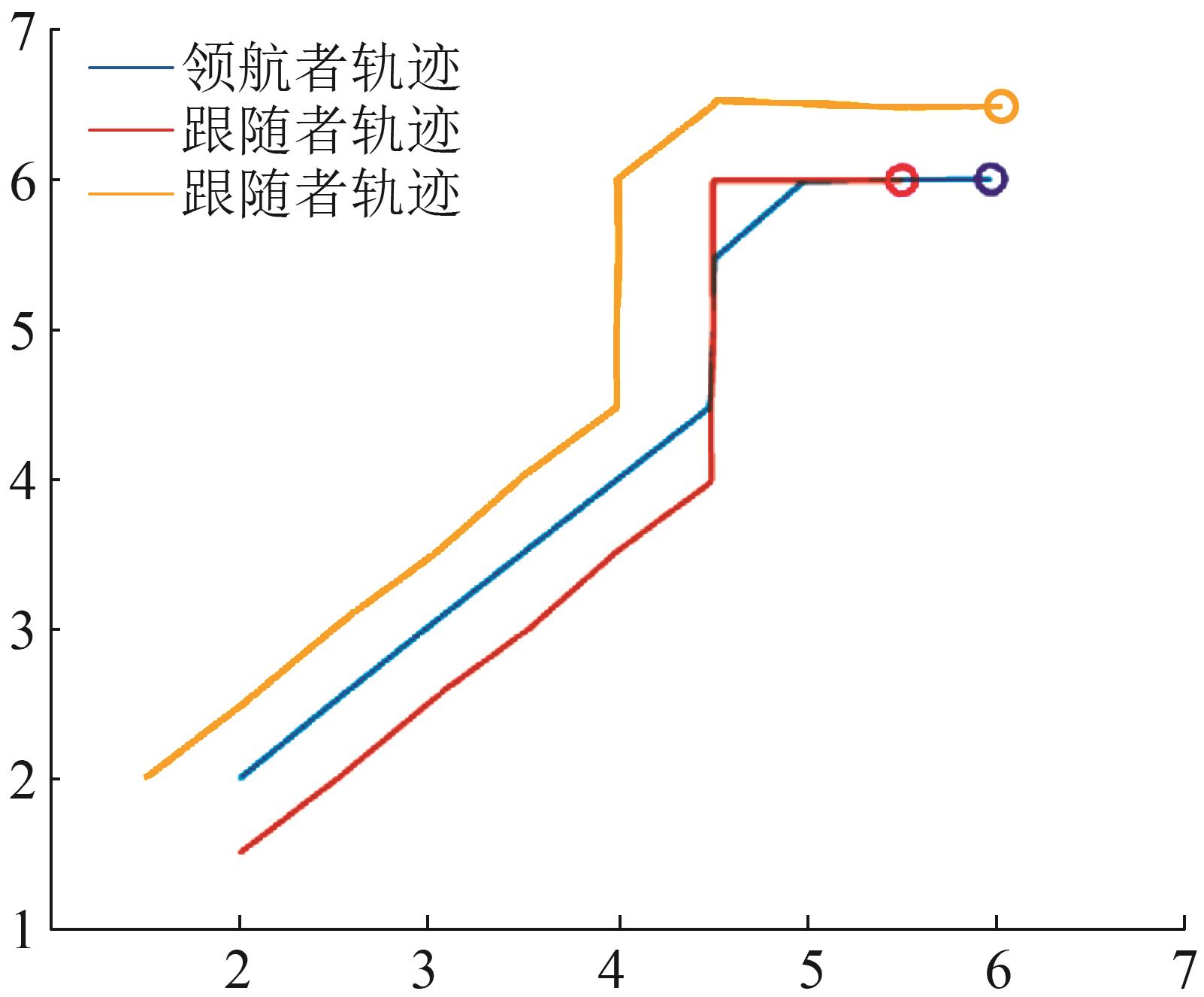
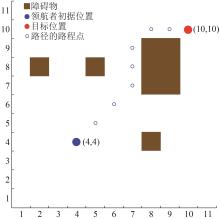
Fig. 12
The second condition and its global path planning
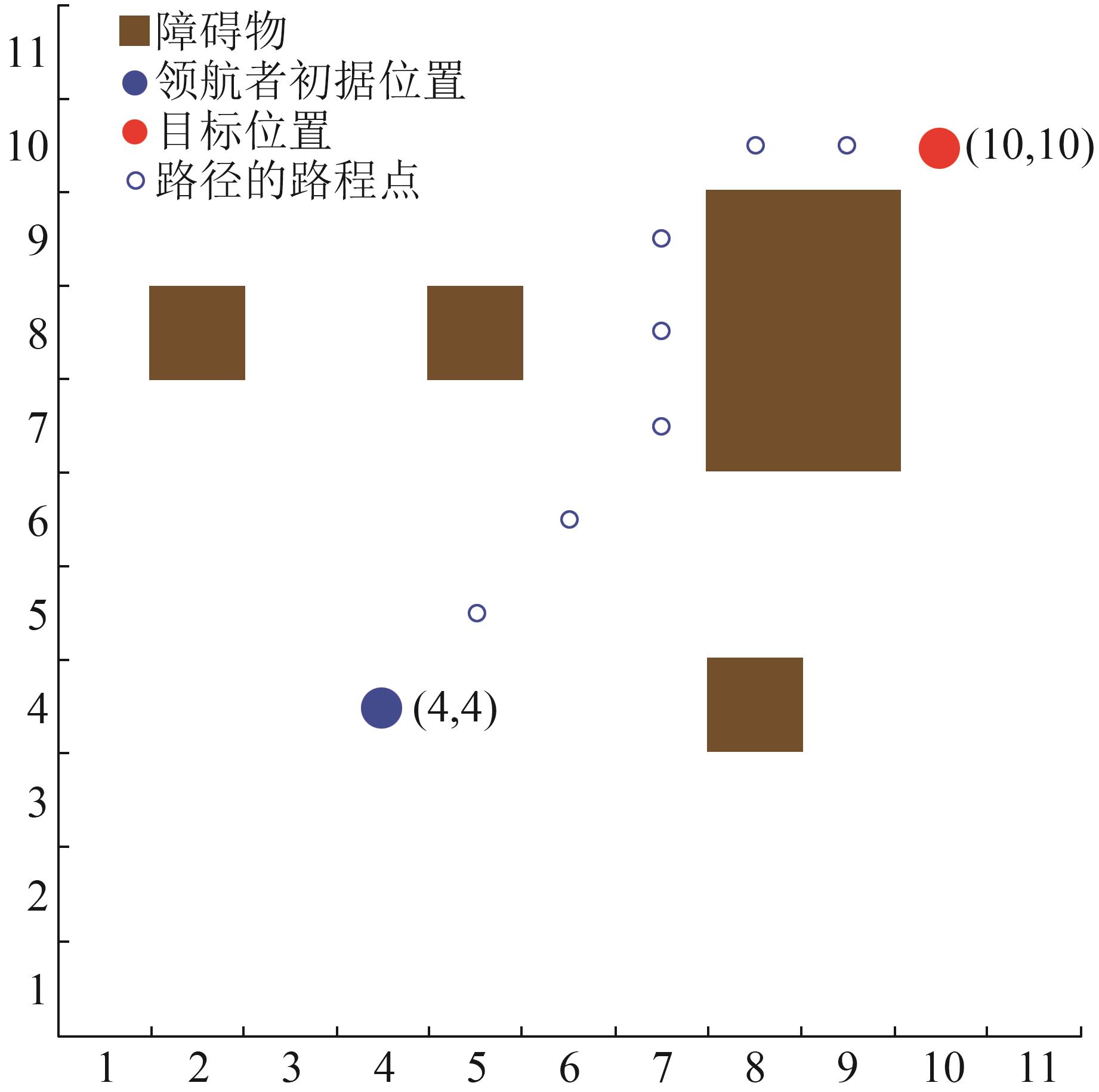
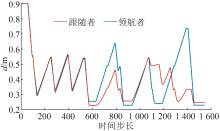
Fig. 13
Distance change diagram between leader and follower under the second initial condition
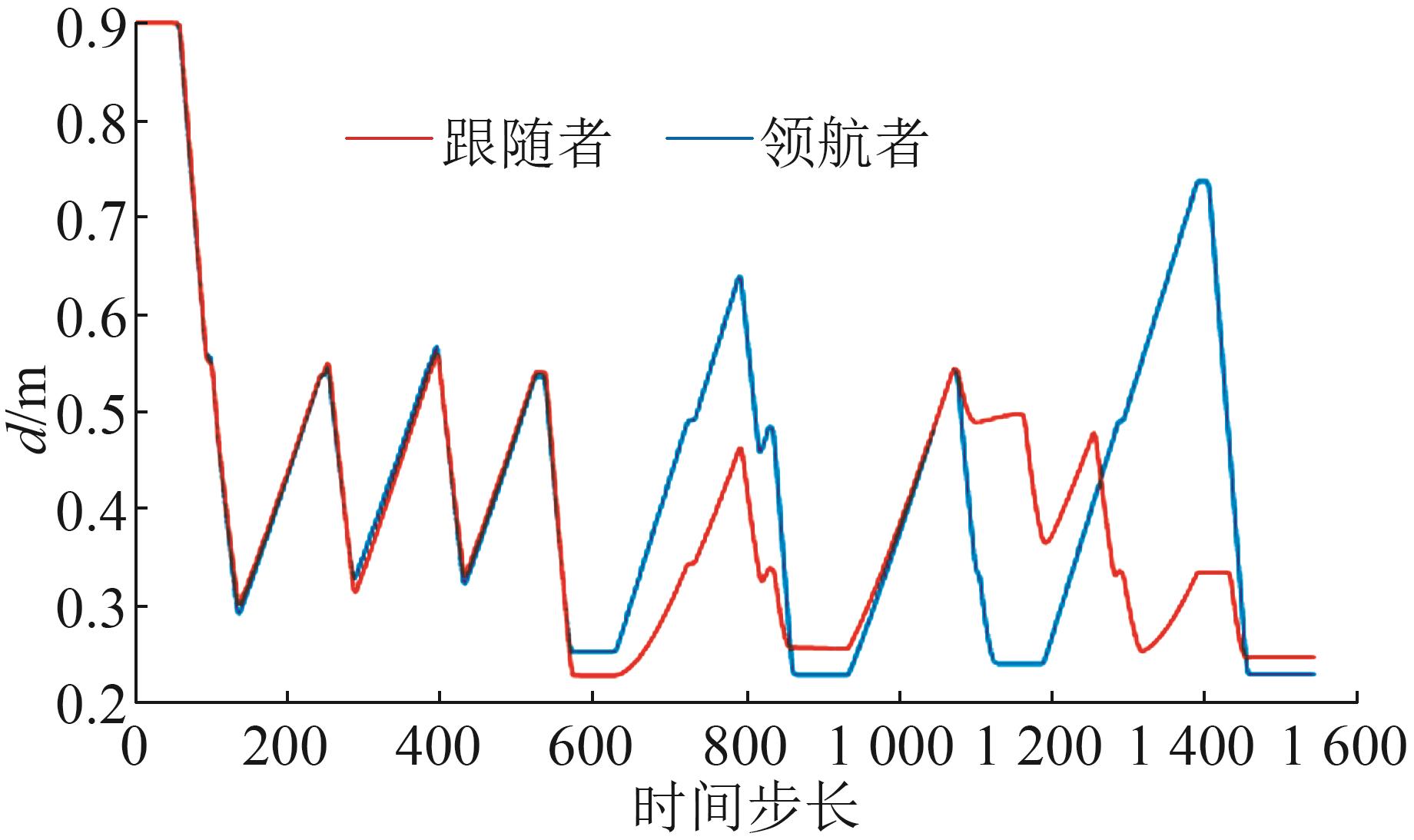
Fig. 14
Trajectory of unmanned vehicle under the second initial condition
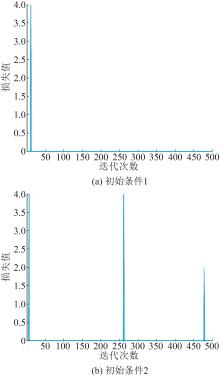
Fig. 15
Loss function diagrams for two initial conditions
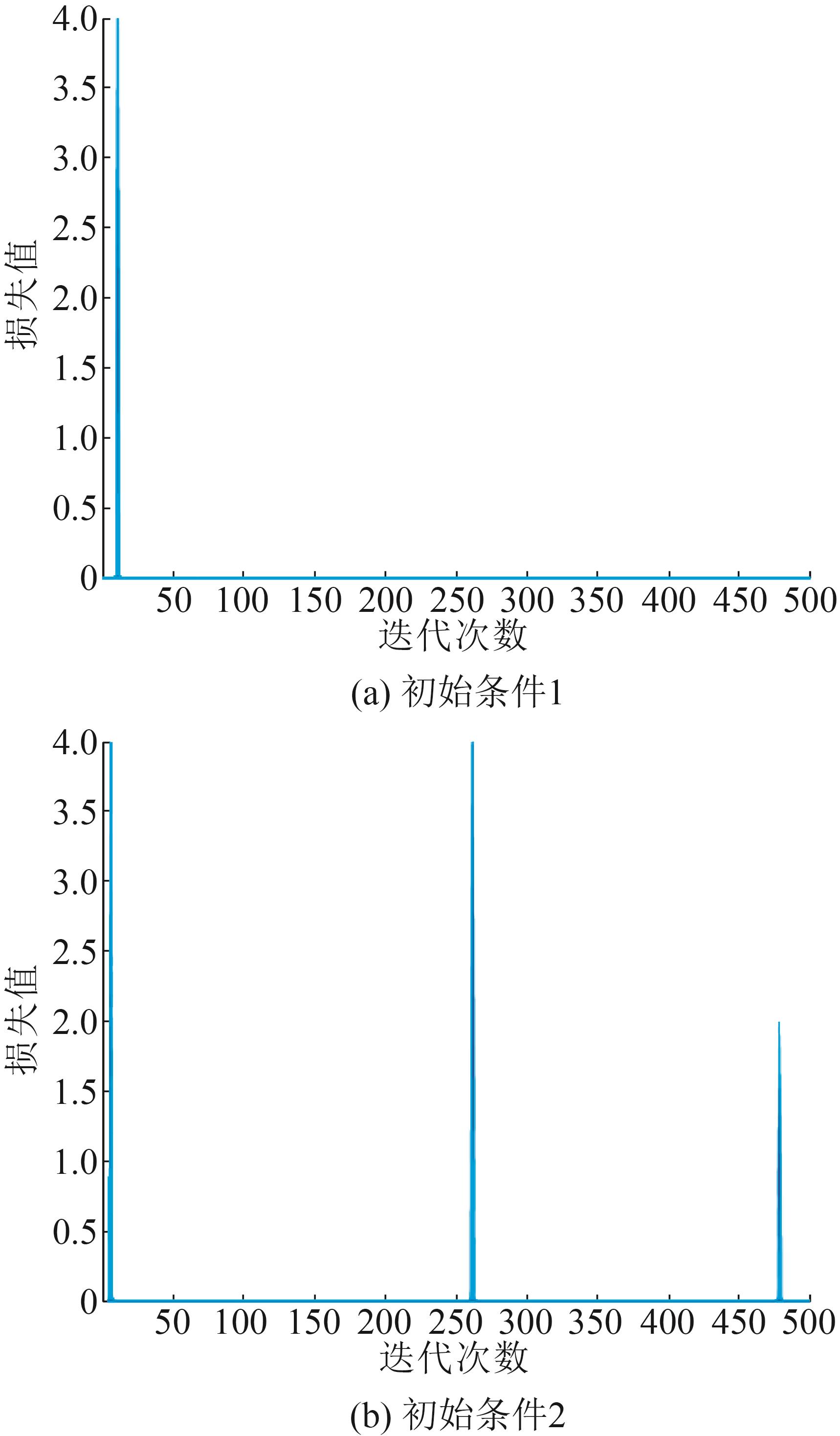
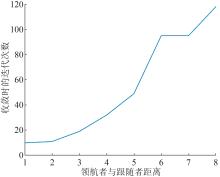
Fig. 16
Influence of distance variation on convergence rate
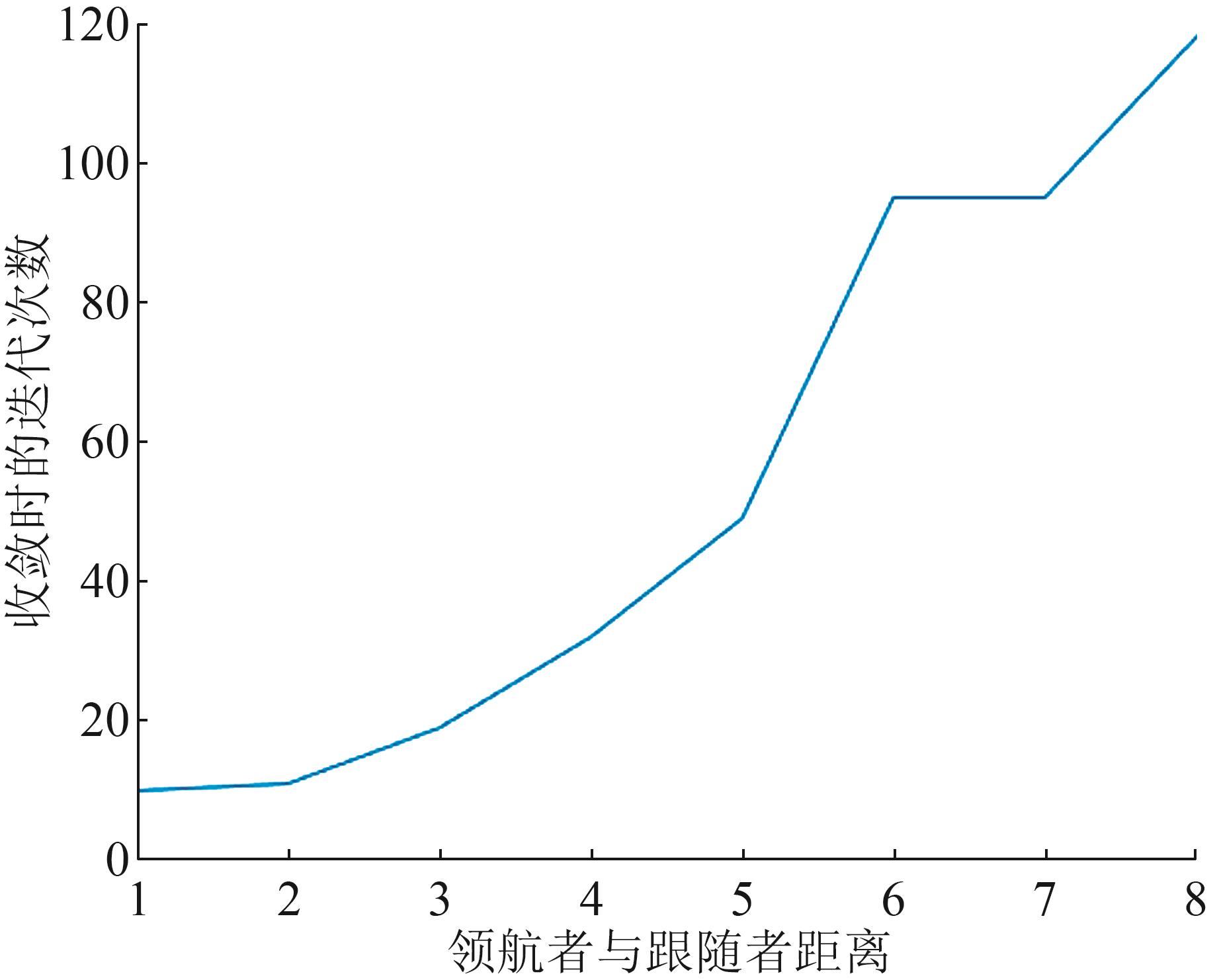
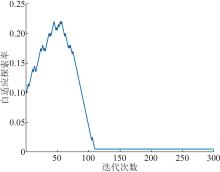
Fig. 17
Adaptive exploration rate change
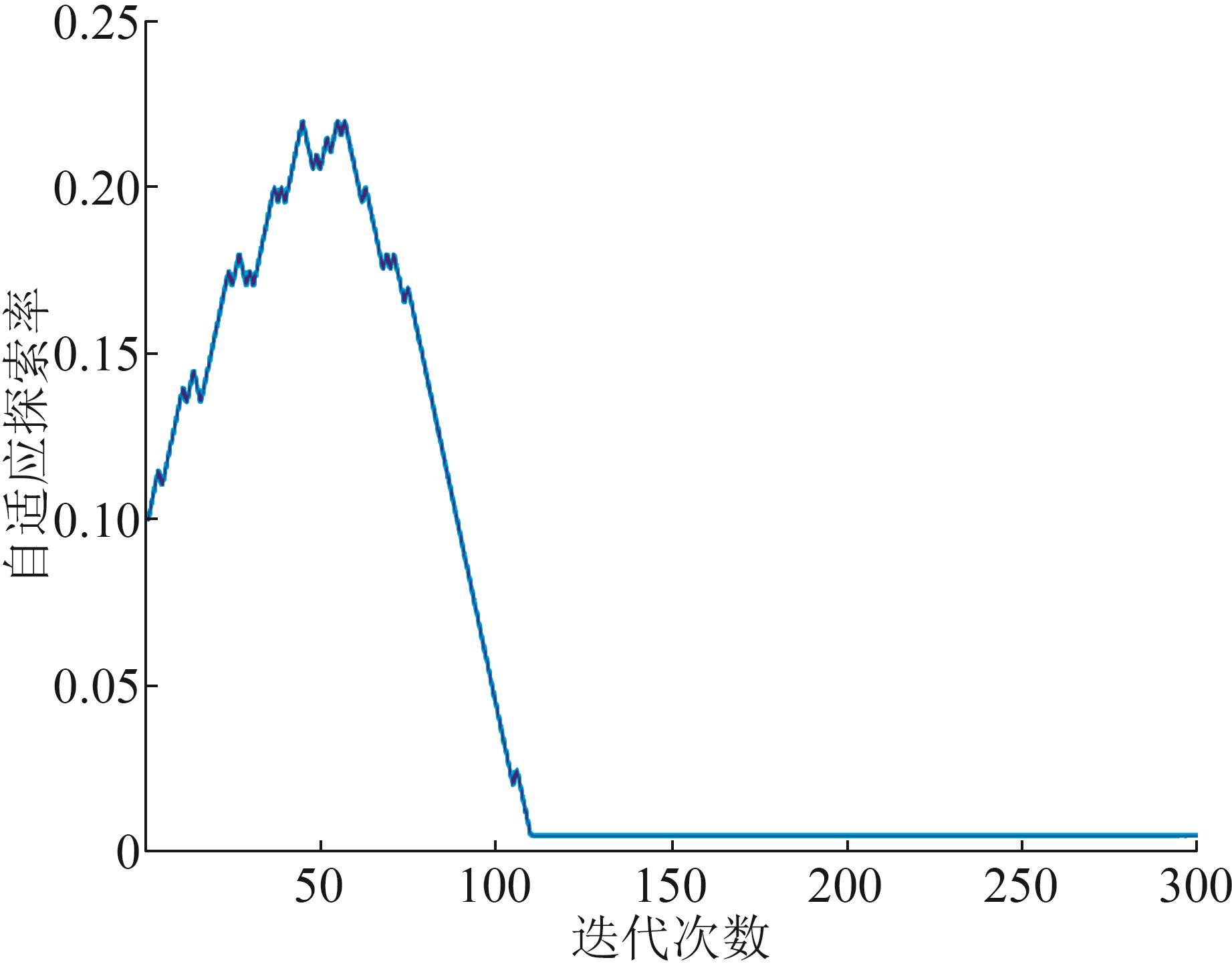
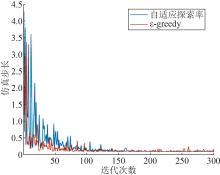
Fig. 18
Change of step number explored under two strategies
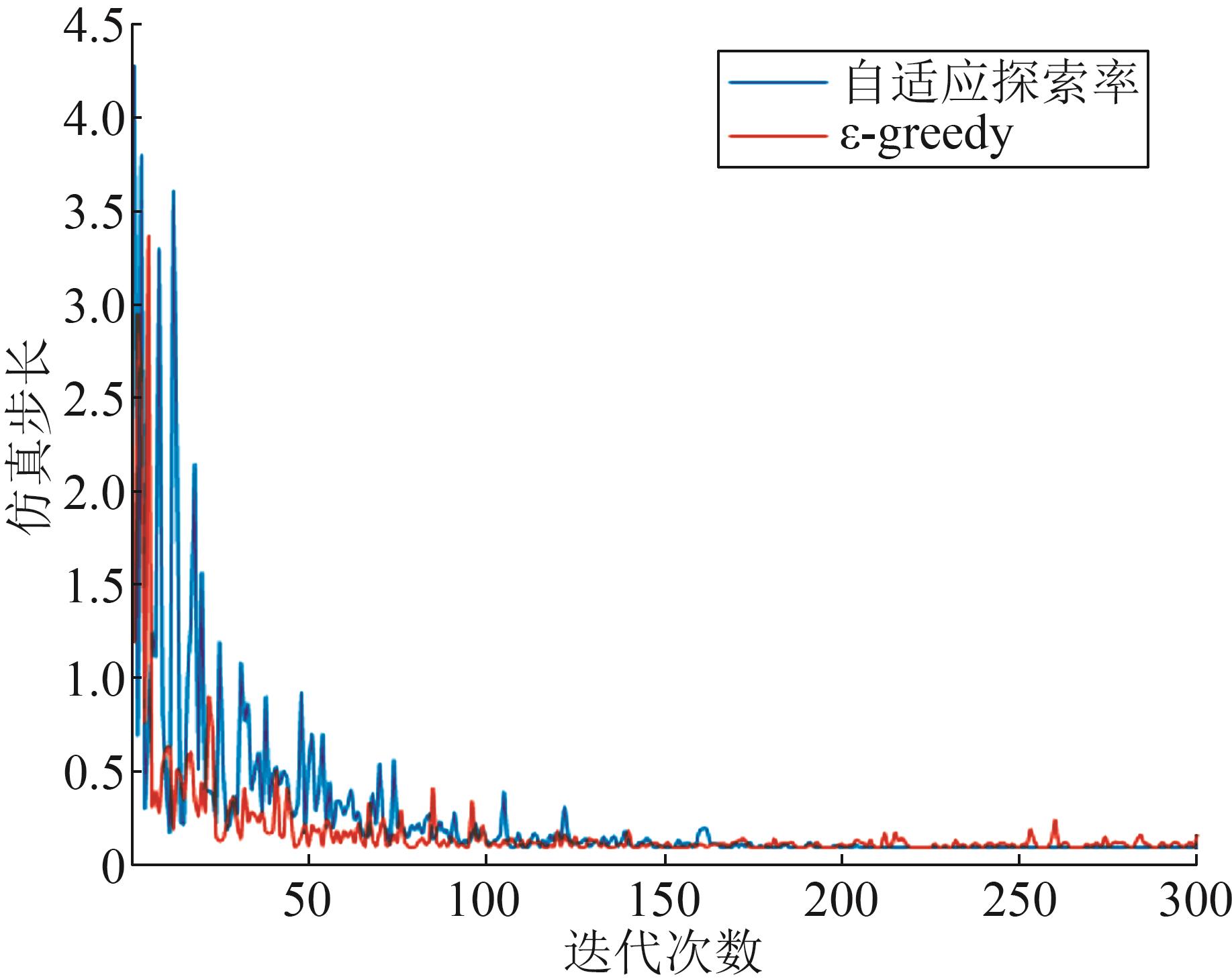

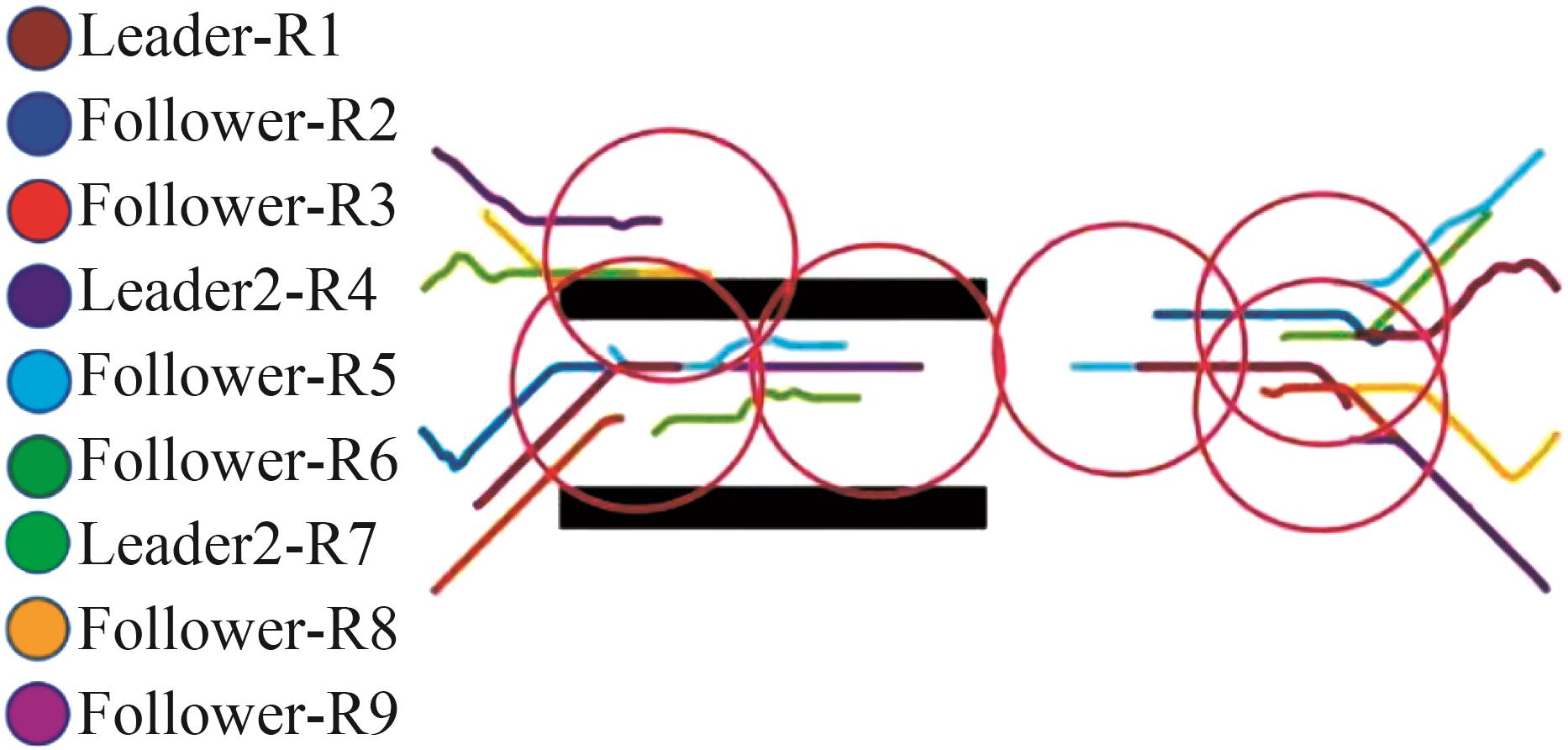
Fig. 19
Trajectory of driverless car
| 1 | 李风雷, 卢昊, 宋闯, 等. 智能化战争与无人系统技术的发展[J]. 无人系统技术, 2018(2): 14-23. |
| Li Fenglei, Lu Hao, Song Chuang, et al. Development of Intelligent Warfare and Unmanned System Technology [J]. Unmanned System Technology, 2018(2): 14-23. | |
| 2 | 侯进永, 刘传文. 无人机集群协同作战发展现状及关键技术分析[J]. 现代雷达, 2020, 42(6): 30-40, 47. |
| Hou Jinyong, Liu Chuanwen. Development Situation and Key Technology Analysis of Cooperative Combat for Unmanned Aerial Vehicle Swarm[J]. Modern Radar, 2020, 42(6): 30-40, 47. | |
| 3 | 王伟嘉, 郑雅婷, 林国政, 等. 集群机器人研究综述[J]. 机器人, 2020, 42(2): 232-256. |
| Wang Weijia, Zheng Yating, Lin Guozheng, et al. Swarm Robotics: A Review[J]. Robot, 2020, 42(2): 232-256. | |
| 4 | 吕震华, 高亢. 美国无人集群城市作战应用发展综述 [J]. 中国电子科学研究院学报, 2020, 15(8): 738-745. |
| Zhenhua Lü, Gao Kang. Review of the Development of Drone Swarm Urban Combat Applications in the USA[J]. Journal of CAEIT, 2020, 15(8): 738-745. | |
| 5 | 刘鸿福, 苏炯铭, 付雅晶. 无人系统集群及其对抗技术研究综述[J]. 飞航导弹, 2018(11): 35-40, 91. |
| Liu Hongfu, Su Jiongming, Fu Yajing. A Review of Unmanned System Cluster and Countermeasures[J]. Maneuverable Missile, 2018(11): 35-40, 91. | |
| 6 | 贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(增1): 4-14. |
| Jia Yongnan, Tian Siying, Li Qing. Development of Unmanned Aerial Vehicle Swarms[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 4-14. | |
| 7 | 张菁, 何友, 彭应宁, 等. 基于神经网络和人工势场的协同博弈路径规划[J]. 航空学报, 2019, 40(3): 228-238. |
| Zhang Jing, He You, Peng Yingning, et al. Neural Network and Artificial Potential Field Based Cooperative and Adversarially Path Planning[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(3): 228-238. | |
| 8 | 史娟. 基于地形分析的路径搜索算法研究[D]. 武汉:华中科技大学, 2005. |
| Shi Juan. Research on Path Searching Based on Terrain Analysis[D]. Wuhan: Huazhong University of Science and Technology, 2005. | |
| 9 | 李杰. 邻域可视性相关的路径规划问题研究[D]. 合肥: 中国科学技术大学, 2011. |
| Li Jie. Neighborhood Visibility Correlative Path Planning Research[D]. Hefei: University of Science and Technology of China, 2011. | |
| 10 | 潘允辉. 基于GIS的无人地面车辆路径规划技术研究[D]. 北京: 北京理工大学, 2016. |
| Pan Yunhui. Research on Path Planning of Unmanned Ground Vehicles Based on GIS[D]. Beijing: Beijing Institute of Technology, 2016. | |
| 11 | 黄东晋, 蒋晨凤, 韩凯丽. 基于深度强化学习的三维路径规划算法[J]. 计算机工程与应用, 2020, 56(15): 30-36. |
| Huang Dongjin, Jiang Chenfeng, Han Kaili. 3D Path Planning Algorithm Based on Deep Reinforcement Learning[J]. Journal of Frontiers of Computer Science and Technology, 2020, 56(15): 30-36. | |
| 12 | 姚昱成, 周浩, 顾万里, 等. 混合算法的无人机路径规划方法应用综述[J]. 南方农机, 2018, 49(12): 2, 5. |
| Yao Yucheng, Zhou Hao, Gu Wanli, et al. Application Review of UAV Path Planning Method Based on Hybrid Algorithm. Southern Agricultural Machinery, 2018, 49(12): 2, 5. | |
| 13 | 孙旭涛. CGF战术位置选择与战术路径规划方法研究[D]. 长沙: 国防科学技术大学, 2014. |
| Sun Xutao. Research of Tactical Position Selection and Tactical Path-finding of CGF[D]. Changsha: National University of Defense Technology, 2014. | |
| 14 | 金淳, 张雨, 王聪. 带时间窗车辆路径问题的分布式多agent蚁群算法[J]. 计算机应用研究, 2018, 35(3): 666-670. |
| Jin Chun, Zhang Yu, Wang Cong. Distributed Multiagent-based Ant Colony Algorithm for Vehicle Routingproblem with Time Windows[J]. Application Research of Computers, 2018, 35(3): 666-670. | |
| 15 | 任彧, 赵师涛. 磁导航AGV深度强化学习路径跟踪控制方法[J]. 杭州电子科技大学学报(自然科学版), 2019, 39(2): 28-34. |
| Ren Yu, Zhao Shitao. Magnetic Navigation AGV Deep Reinforcement Learning Path Tracking Control Method[J]. Journal of Hangzhou Dianzi University (Natural Sciences), 2019, 39(2): 28-34. |
| [1] | Liang Longxiao, Mao Jianlin, Wang Niya, Fang Chengyuan, Zhou Wenna. Multi-agent CBS Path Planning Algorithm Based on Minimum Planning Margin First [J]. Journal of System Simulation, 2026, 38(5): 1159-1173. |
| [2] | Meng Wenlong, Pu Yanbo, Gong Ya. AUV Path Planning Integrating Local-global Strategies in Unknown Environments [J]. Journal of System Simulation, 2026, 38(4): 889-902. |
| [3] | Li Dequan, Xiong Wan. Robot Path Planning by Reinforcement Learning Based on SAC3Q-HDM [J]. Journal of System Simulation, 2026, 38(3): 714-724. |
| [4] | Ge Xiaofei, Lian Jinling, Han Jin, Fan Xin'an, Luo Danmei, Hua Yuxiang, Liu Hao, Zhang Lijian. Research on Performance Evaluation of P300 Brain-computer Interface Under Environment Modeling and Simulation [J]. Journal of System Simulation, 2026, 38(3): 746-757. |
| [5] | Xie Jun, Zhang Qi, Peng Yanyun, Shi Haonan, Li Dongyang, Liu Xi. Research on UAV Path Planning Method Based on Collision Free Trajectory [J]. Journal of System Simulation, 2026, 38(3): 808-817. |
| [6] | Zhu Ling, Li Jing, Zhang Zhaohui. An Adaptive Robot Path Planning Based on Improved REA* Algorithm [J]. Journal of System Simulation, 2026, 38(2): 332-345. |
| [7] | Wang Bingkun, Wang Yue, Yang Mei, Zhang Pengnian, Fan Bohao, Tang Jie. Strike Strategy Planning Method of Unmanned Ground Vehicles Based on Improved PPO Algorithm [J]. Journal of System Simulation, 2026, 38(2): 372-386. |
| [8] | Wang Linxuan, Liu Yongkui, Zhang Lin, Lin Tingyu, Wang Lihui. Anylogic-based Platform-Enterprise Collaborative Scheduling Simulation System for Cloud Manufacturing [J]. Journal of System Simulation, 2025, 37(9): 2225-2241. |
| [9] | Yu Yiran, Lai Huicheng, Gao Guxue, Zhang Guo, Peng Wangyinan, Yang Longfei, Huang Junhao. Optimization Method for Multi Agricultural Machinery Collaborative Operation Based on Genetic Algorithm and A * Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2397-2408. |
| [10] | Ni Peilong, Mao Pengjun, Wang Ning, Yang Mengjie. Robot Path Planning Based on Improved A-DDQN Algorithm [J]. Journal of System Simulation, 2025, 37(9): 2420-2430. |
| [11] | Zhang Kaixiang, Mao Jianlin, Wang Niya, Xu Zhihao. Multi-robot Hierarchical Collaborative k-robust Path Planning for Path Interference [J]. Journal of System Simulation, 2025, 37(8): 2074-2088. |
| [12] | Wan Yuhang, Zhu Zilu, Zhong Chunfu, Liu Yongkui, Lin Tingyu, Zhang Lin. Dynamic Path Planning for Robotic Arms Based on an Improved PPO Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1462-1473. |
| [13] | Ye Chen, Shao Peng, Zhang Shaoping, Li Wenting, Zhou Tengming. Enhanced Artificial Gorilla Algorithm for Mobile Robot Path Planning [J]. Journal of System Simulation, 2025, 37(6): 1474-1485. |
| [14] | Zhang Yan, Li Binghua, Huo Tao, Liu Rong. Research on Robot Dynamic Obstacle Avoidance Method Based on Improved A* and Dynamic Window Algorithm [J]. Journal of System Simulation, 2025, 37(6): 1555-1564. |
| [15] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
