

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (5): 1043-1060.doi: 10.16182/j.issn1004731x.joss.23-0053
Liu Jinhui1( ), Chen Mengyuan1,2(), Han Pengpeng1, Chen Hebao1, Zhang Yukun1
), Chen Mengyuan1,2(), Han Pengpeng1, Chen Hebao1, Zhang Yukun1
Received:2023-01-15
Revised:2023-04-06
Online:2024-05-15
Published:2024-05-21
Contact:
Chen Mengyuan
E-mail:3246580992@qq.com;mychen@ahpu.edu.cn
CLC Number:
Liu Jinhui, Chen Mengyuan, Han Pengpeng, Chen Hebao, Zhang Yukun. A Graph Neural Network Visual SLAM Algorithm for Large-angle View Motion[J]. Journal of System Simulation, 2024, 36(5): 1043-1060.

Fig. 1
Algorithm framework diagram of this paper
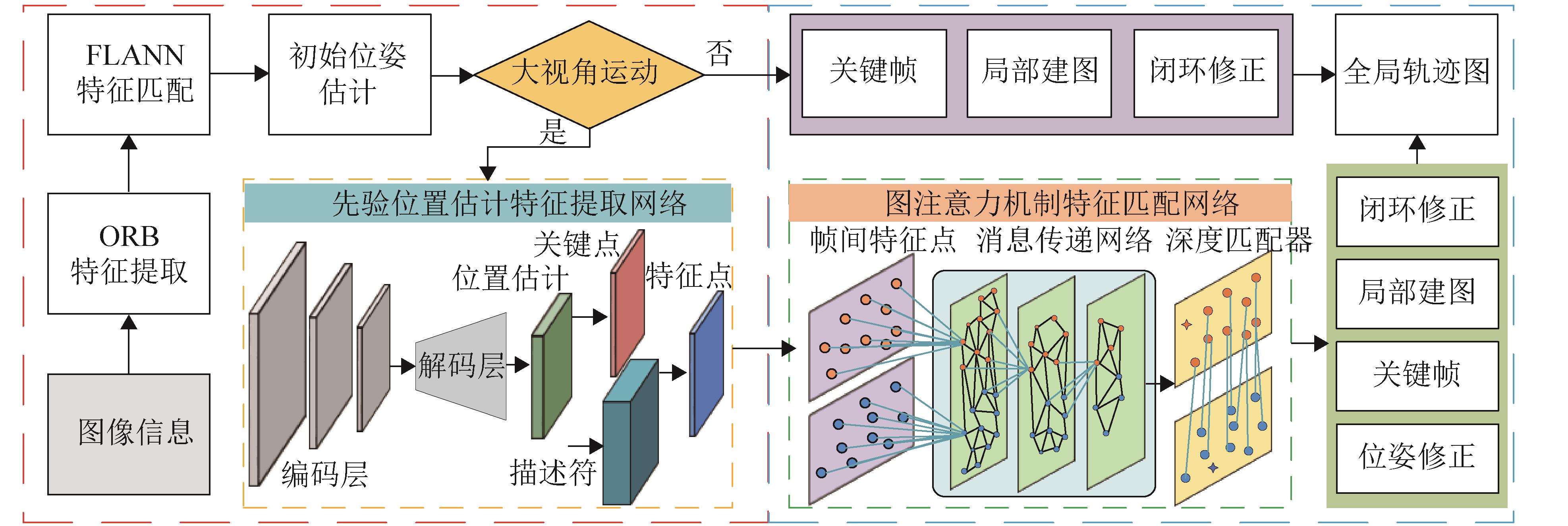

Fig. 2
Prior location estimation feature extraction network structure diagram
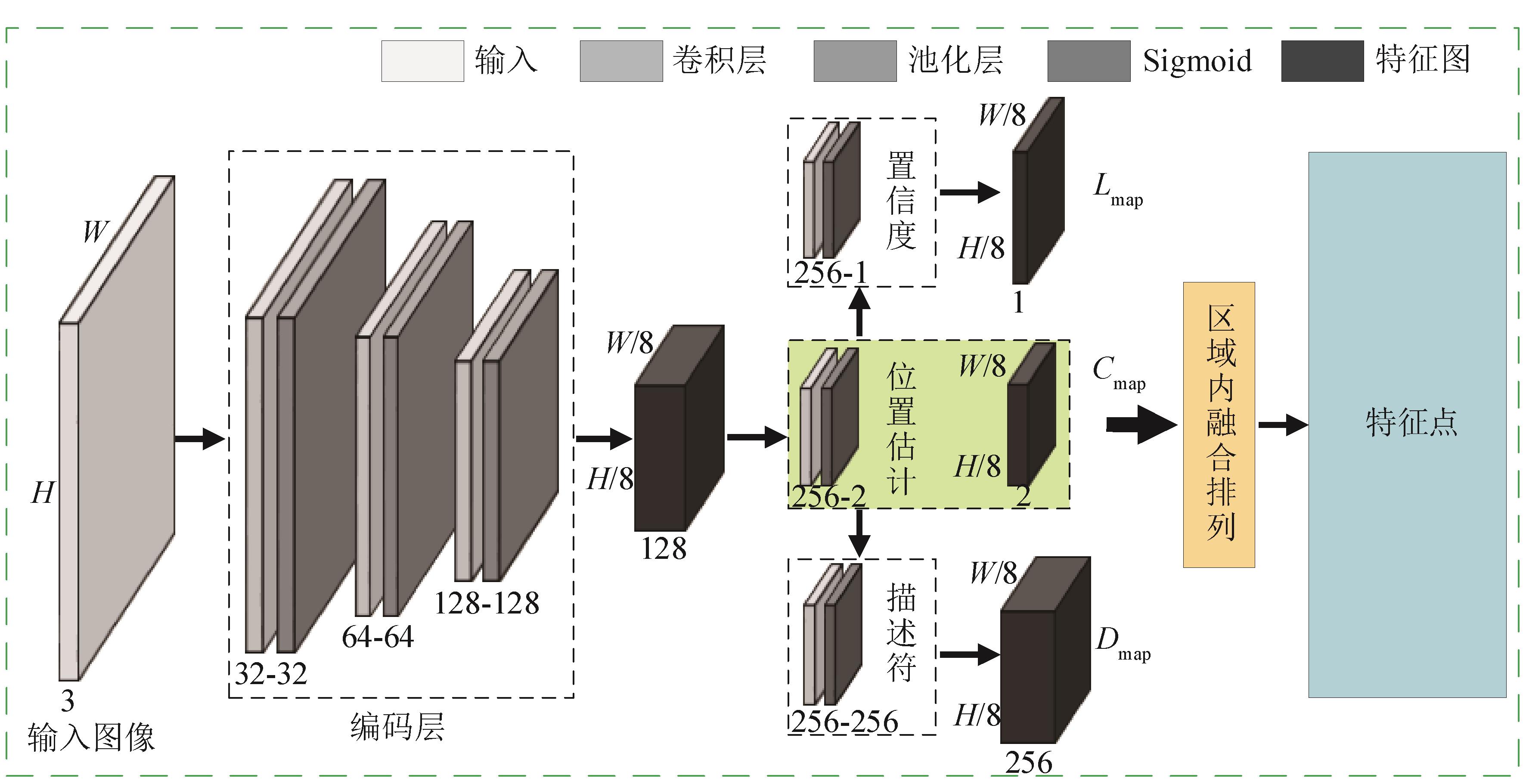
Fig. 3
Position estimation module
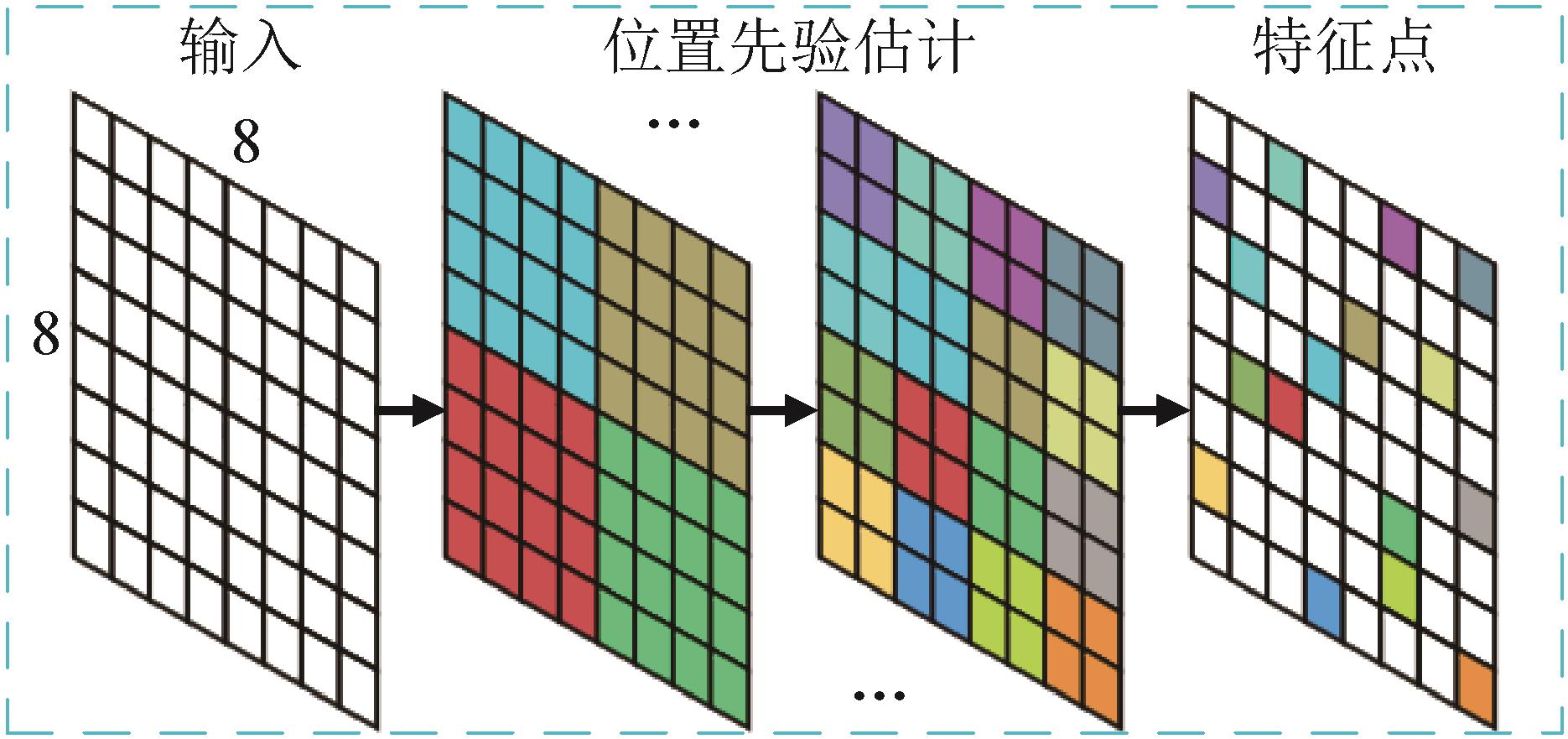

Fig. 4
Graph attention mechanism feature matching network structure diagram
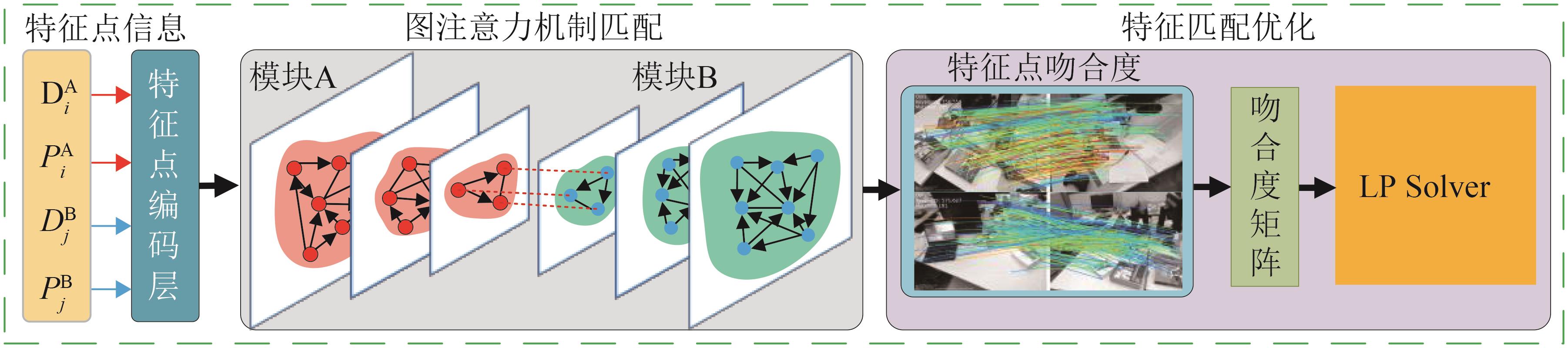

Fig. 5
Comparative experiment of i_castle sequence lighting gradient feature extraction of HPatches dataset


Fig. 6
Comparison experiment of texture sparse scene feature extraction under i_whitebuilding sequence lighting gradient of HPatches dataset
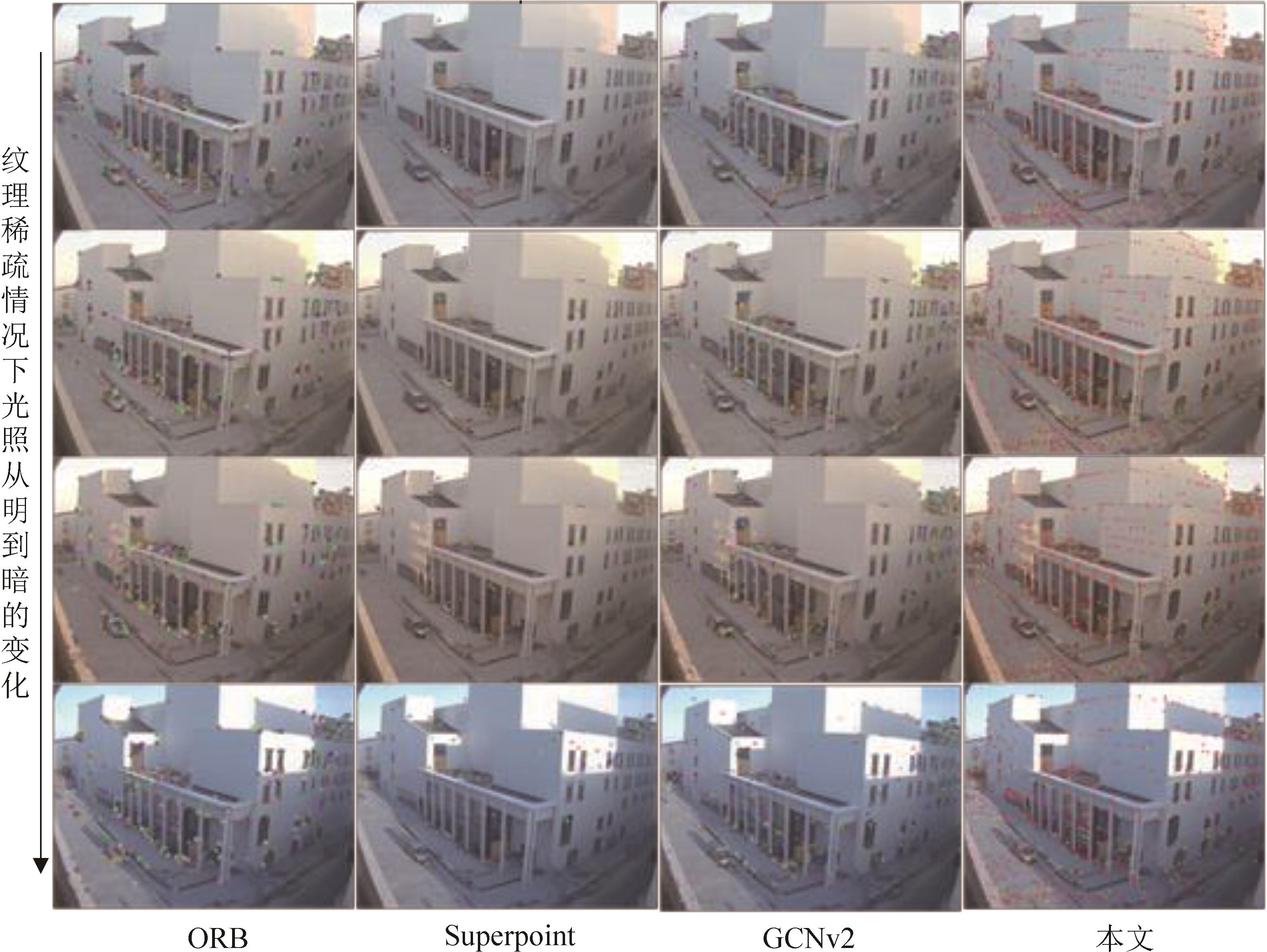
Table 1
Feature detection performance Rep comparison results
| 数据集 | ORB | Superpoint | GCNv2 | 本文 |
|---|---|---|---|---|
| i_books | 0.572 | 0.591 | 0.627 | 0.693 |
| i_castle | 0.583 | 0.614 | 0.641 | 0.716 |
| i_fruits | 0.537 | 0.569 | 0.599 | 0.593 |
| i_ski | 0.564 | 0.576 | 0.598 | 0.645 |
| i_whitebuilding | 0.524 | 0.513 | 0.545 | 0.617 |

Fig. 7
Comparison experiment of feature matching in TUM and HPatches data sets under gradient of viewing angle
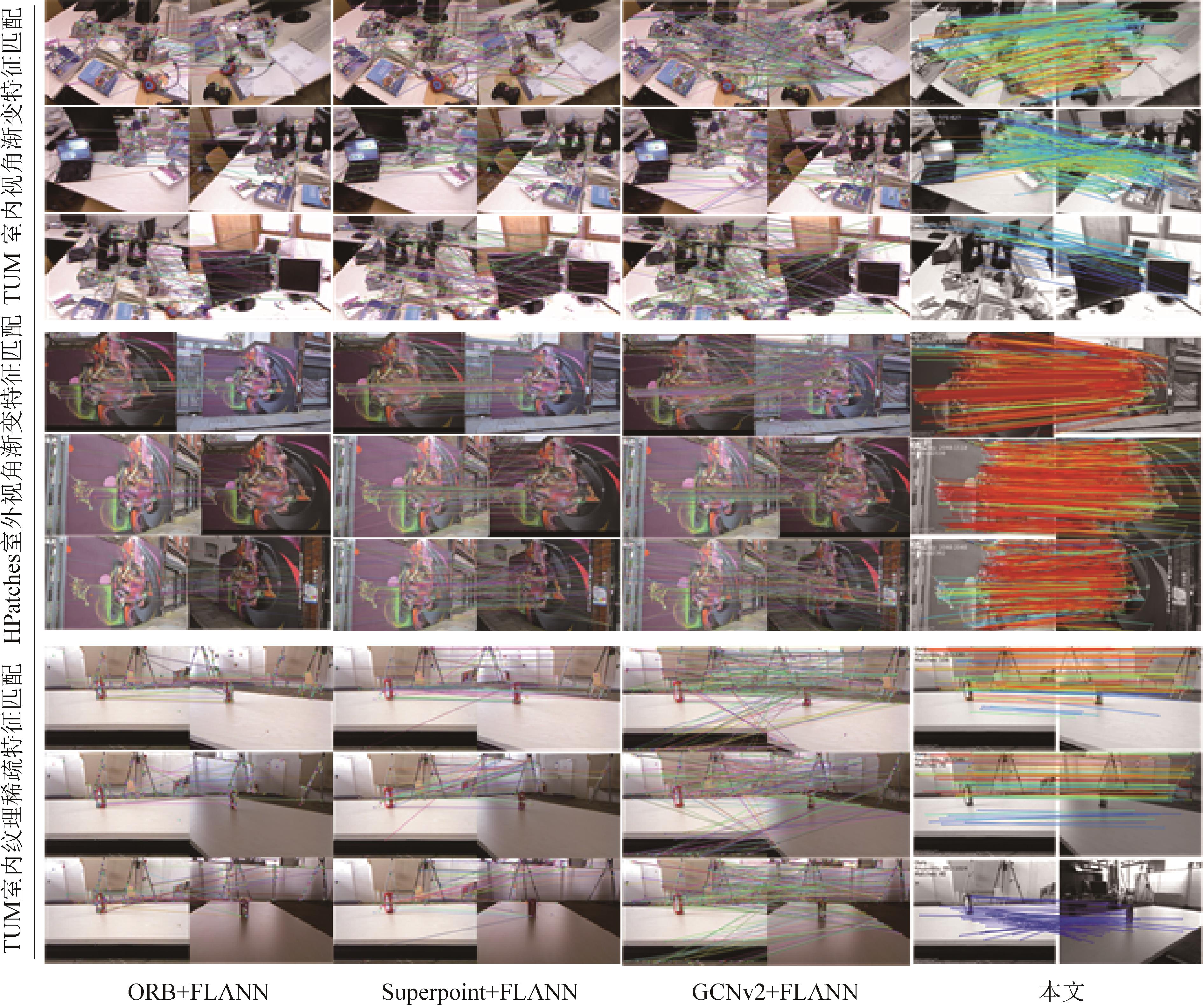
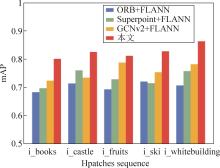
Fig. 8
Comparison results of feature matching performance mAP in HPatches dataset under light gradient scene
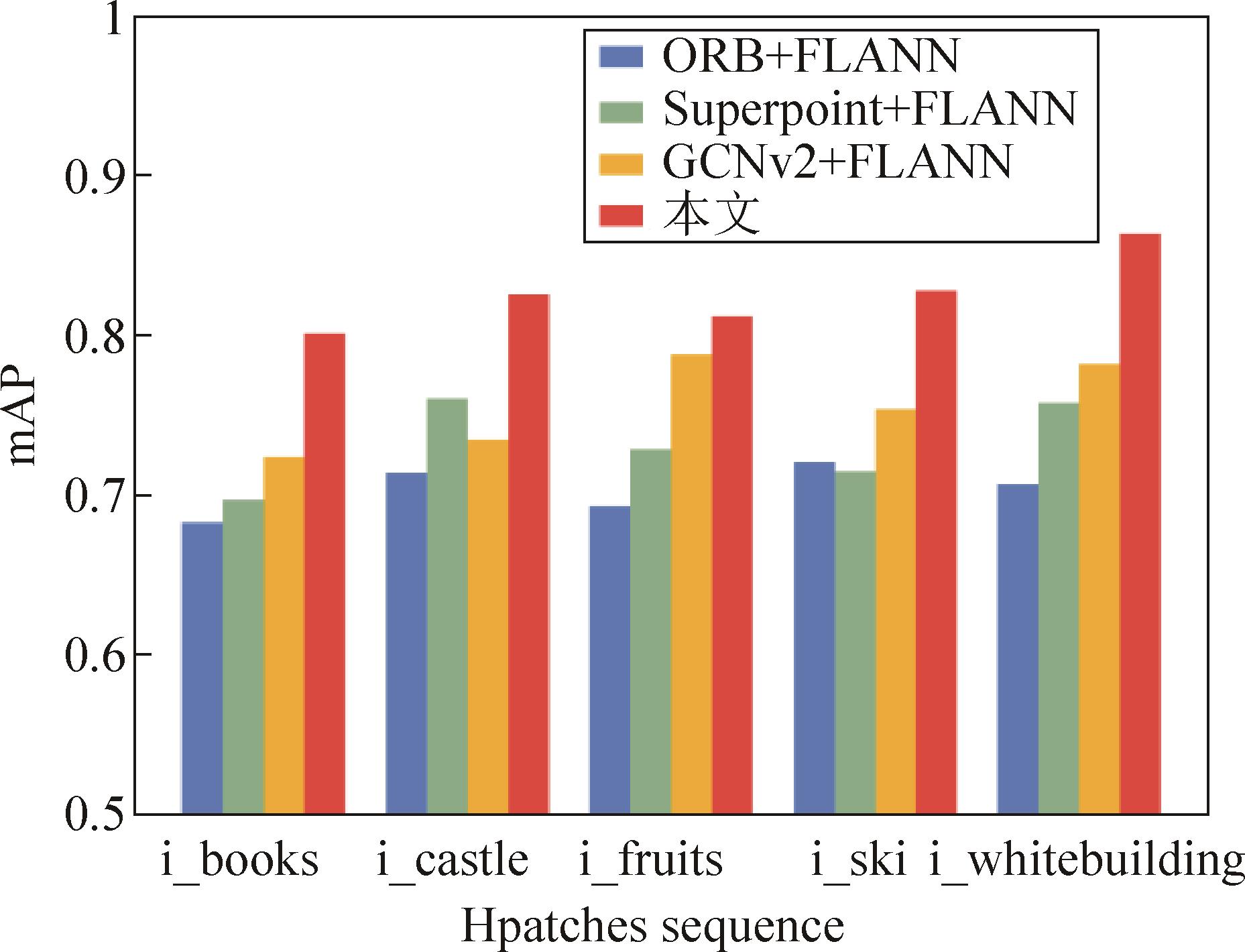
Table 2
Feature matching performance mAP comparison results in view angle fading scenes
| 数据集 | ORB+FLANN | Superpoint+FLANN | GCNv2+FLANN | 本文 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| @30° | @60° | @90° | @30° | @60° | @90° | @30° | @60° | @90° | @30° | @60° | @90° | |
| v_abstract | 0.643 | 0.465 | 0.298 | 0.620 | 0.473 | 0.239 | 0.728 | 0.533 | 0.295 | 0.802 | 0.739 | 0.507 |
| v_bees | 0.651 | 0.482 | 0.262 | 0.702 | 0.536 | 0.388 | 0.648 | 0.499 | 0.386 | 0.857 | 0.686 | 0.569 |
| v_beyus | 0.682 | 0.503 | 0.312 | 0.608 | 0.449 | 0.256 | 0.612 | 0.428 | 0.324 | 0.829 | 0.737 | 0.571 |
| v_home | 0.605 | 0.396 | 0.274 | 0.633 | 0.405 | 0.293 | 0.730 | 0.475 | 0.252 | 0.796 | 0.706 | 0.535 |
| v_woman | 0.597 | 0.391 | 0.238 | 0.652 | 0.433 | 0.264 | 0.671 | 0.416 | 0.241 | 0.840 | 0.744 | 0.522 |

Fig. 9
TUM dataset trajectory comparison
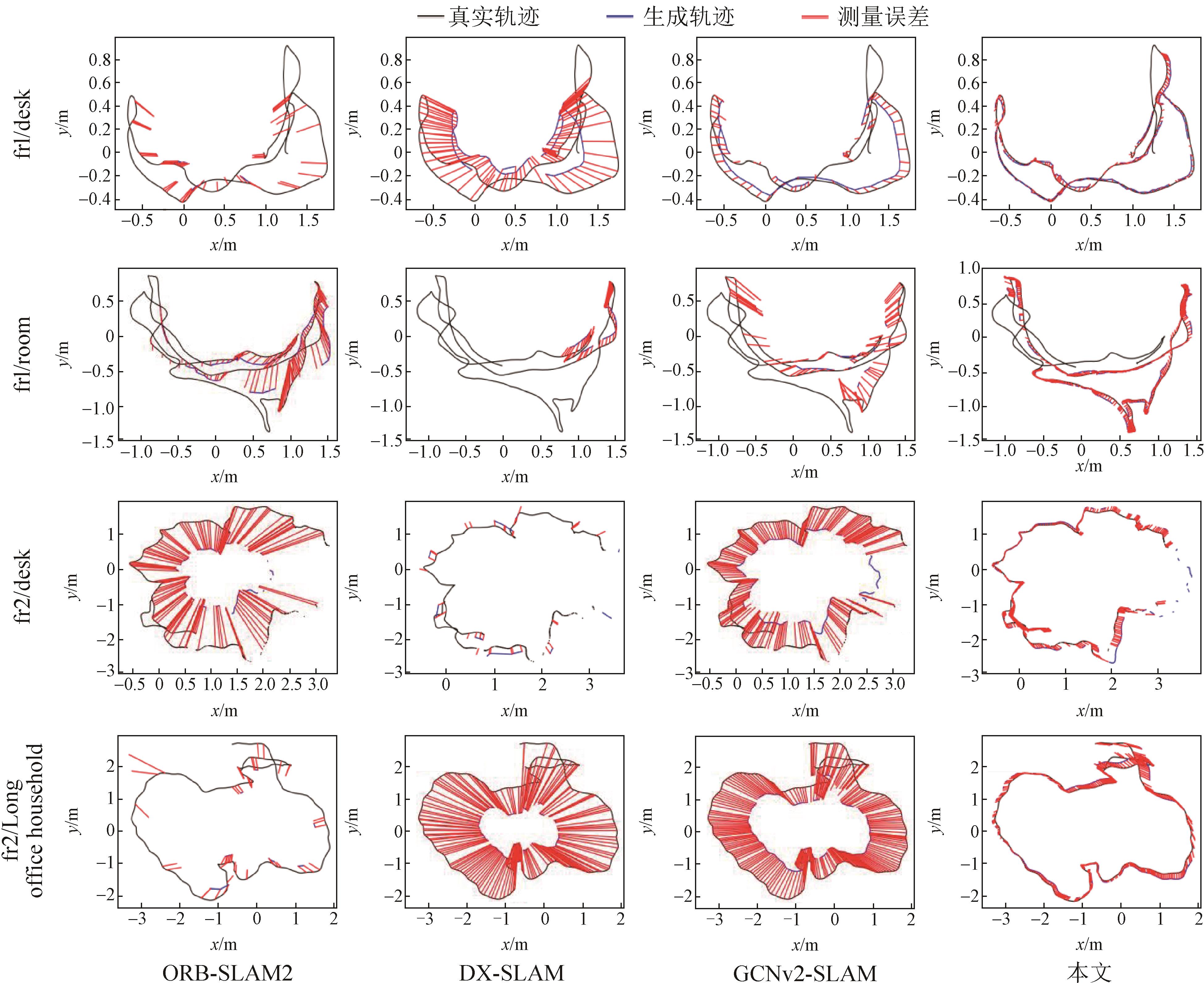
Table 3
Comparison of trajectory error of TUM data set
| 数据集 | ORB-SLAM2 | DX-SLAM | GCNv2-SLAM | 本文 | ||||
|---|---|---|---|---|---|---|---|---|
| ATE | RPE | ATE | RPE | ATE | RPE | ATE | RPE | |
| fr1/360 | ― | ― | ― | ― | 0.065 | 0.082 | 0.145 | 0.199 |
| fr1/floor | 0.390 | 0.469 | ― | ― | 0.138 | 0.167 | 0.019 | 0.038 |
| fr1/desk | 0.081 | 0.101 | 0.300 | 0.364 | 0.188 | 0.230 | 0.039 | 0.050 |
| fr1/desk2 | 0.571 | 0.999 | 0.343 | 0.416 | 0.156 | 0.197 | 0.047 | 0.075 |
| fr1/room | 0.295 | 0.354 | 0.181 | 0.212 | 0.246 | 0.305 | 0.070 | 0.111 |
| fr2/desk | 0.931 | 1.149 | 0.581 | 0.712 | 0.160 | 0.199 | 0.109 | 0.133 |
| fr3/long_office_household | 1.222 | 1.553 | 0.791 | 1.007 | 0.363 | 0.455 | 0.169 | 0.176 |

Fig. 10
KITTI data set trajectory comparison chart
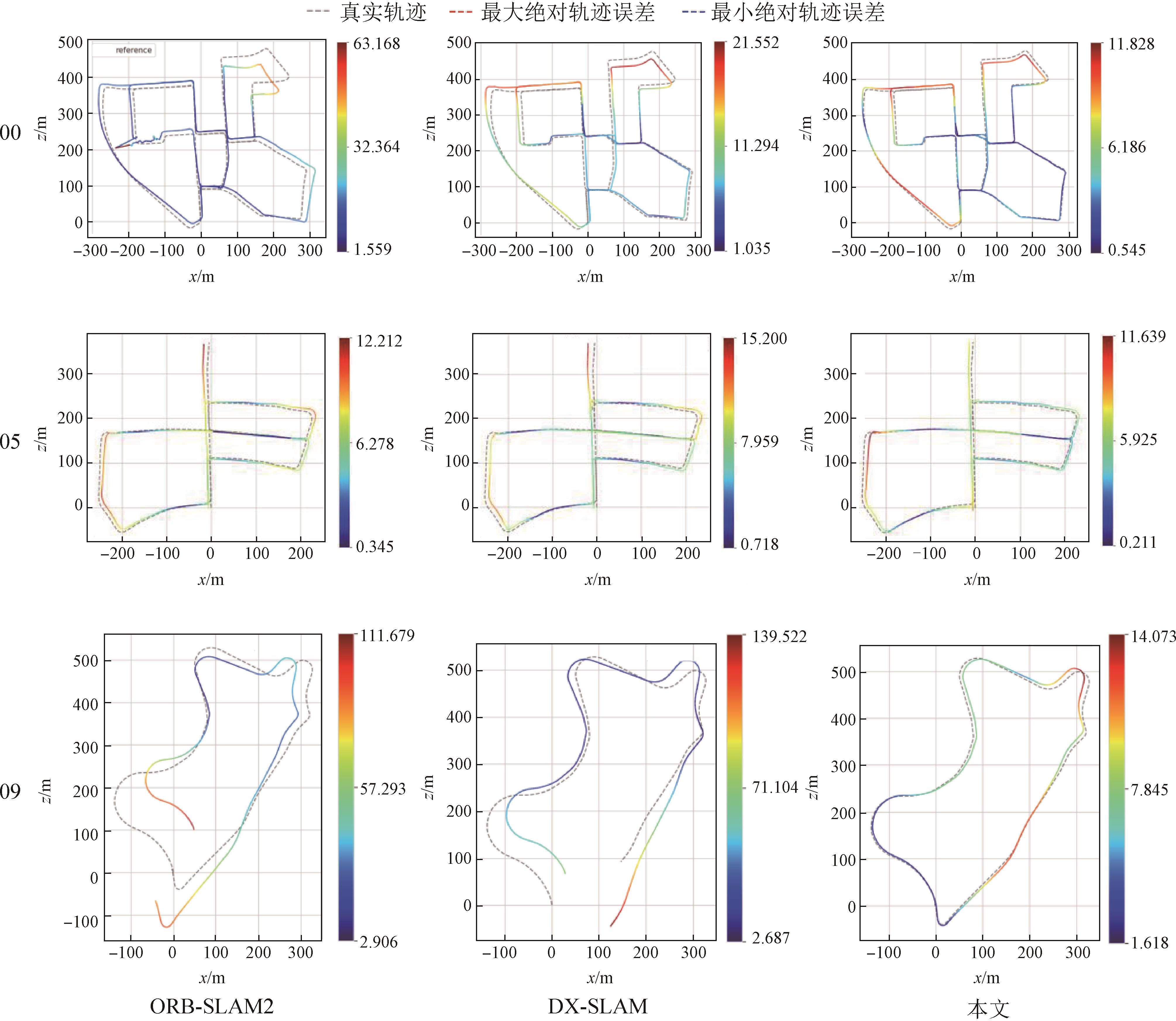

Fig. 11
Comparison of ATE and RPE of KITTI 00-10 sequence
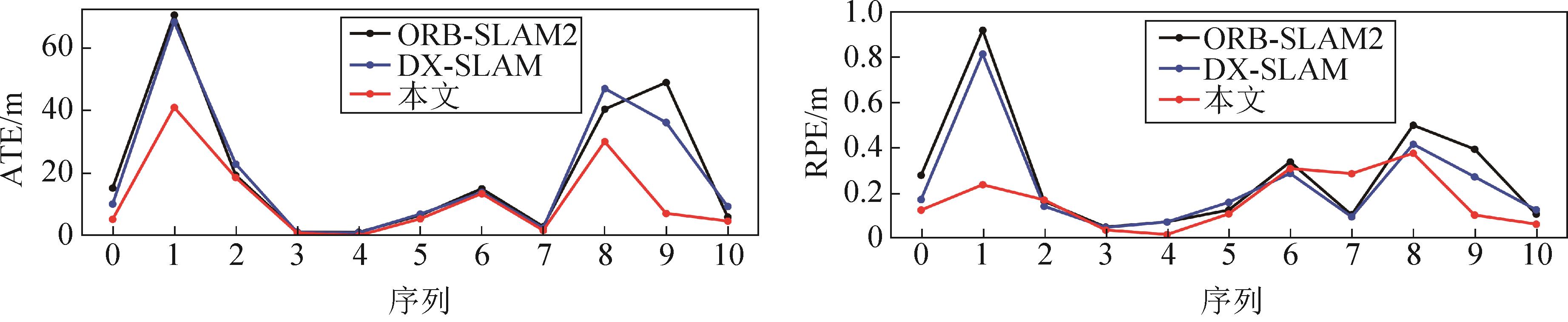
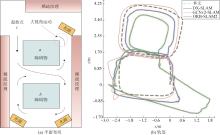
Fig. 12
Comparison of real scene layout diagram and different algorithm trajectories
Table 4
Average running time of different algorithms
| 算法 | 特征提取/ms | 特征匹配/ms | 总时间/ms | 平均帧率/(帧/s) |
|---|---|---|---|---|
| ORB-SLAM2 | 12.88 | 15.06 | 27.94 | 30 |
| DX-SLAM | 32.42 | 39.24 | 71.66 | 15 |
| GCNv2-SLAM | 19.45 | 31.57 | 51.02 | 20 |
| 本文 | 16.32 | 30.79 | 47.11 | 20 |
| 1 | Smith R C, Cheeseman P. On the Representation and Estimation of Spatial Uncertainty[J]. The International Journal of Robotics Research, 1986, 5(4): 56-68. |
| 2 | Dissanayake M W M G, Newman P, Clark S, et al. A Solution to the Simultaneous Localization and Map Building (SLAM) Problem[J]. IEEE Transactions on Robotics and Automation, 2001, 17(3): 229-241. |
| 3 | 王晨捷, 罗斌, 李成源, 等. 无人机视觉SLAM协同建图与导航[J]. 测绘学报, 2020, 49(6): 767-776. |
| Wang Chenjie, Luo Bin, Li Chengyuan, et al. The Collaborative Mapping and Navigation Based on Visual SLAM in UAV Platform[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6): 767-776. | |
| 4 | Mur-Artal Raúl, Tardós Juan D. ORB-SLAM2: An Open-source SLAM System for Monocular, Stereo, and RGB-D Cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 5 | Rublee E, Rabaud V, Konolige K, et al. ORB: An Efficient Alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision. Piscataway, NJ, USA: IEEE, 2011: 2564-2571. |
| 6 | 聂伟, 文怀志, 谢良波, 等. 一种基于单目视觉的无人机室内定位方法[J]. 电子与信息学报, 2022, 44(3): 906-914. |
| Nie Wei, Wen Huaizhi, Xie Liangbo, et al. Indoor Localization of UAV Using Monocular Vision[J]. Journal of Electronics & Information Technology, 2022, 44(3): 906-914. | |
| 7 | 丁文东, 徐德, 刘希龙, 等. 移动机器人视觉里程计综述[J]. 自动化学报, 2018, 44(3): 385-400. |
| Ding Wendong, Xu De, Liu Xilong, et al. Review on Visual Odometry for Mobile Robots[J]. Acta Automatica Sinica, 2018, 44(3): 385-400. | |
| 8 | 陈孟元, 张玉坤, 田德红, 等. 基于兴趣倾向机制的仿生SLAM算法[J]. 电子与信息学报, 2022, 44(5): 1743-1753. |
| Chen Mengyuan, Zhang Yukun, Tian Dehong, et al. Bionic SLAM Algorithm Based on Interest Tendency Mechanism[J]. Journal of Electronics & Information Technology, 2022, 44(5): 1743-1753. | |
| 9 | 邸凯昌, 万文辉, 赵红颖, 等. 视觉SLAM技术的进展与应用[J]. 测绘学报, 2018, 47(6): 770-779. |
| Di Kaichang, Wan Wenhui, Zhao Hongying, et al. Progress and Applications of Visual SLAM[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(6): 770-779. | |
| 10 | 牛珉玉, 黄宜庆. 基于动态耦合与空间数据关联的RGB-D SLAM算法[J]. 机器人, 2022, 44(3): 333-342. |
| Niu Minyu, Huang Yiqing. An RGB-D SLAM Algorithm Based on Dynamic Coupling and Spatial Data Association[J]. Robot, 2022, 44(3): 333-342. | |
| 11 | 林景栋, 吴欣怡, 柴毅, 等. 卷积神经网络结构优化综述[J]. 自动化学报, 2020, 46(1): 24-37. |
| Lin Jingdong, Wu Xinyi, Chai Yi, et al. Structure Optimization of Convolutional Neural Networks: A Survey[J]. Acta Automatica Sinica, 2020, 46(1): 24-37. | |
| 12 | Tateno Keisuke, Tombari Federico, Laina Iro, et al. CNN-SLAM: Real-time Dense Monocular SLAM with Learned Depth Prediction[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2017: 6565-6574. |
| 13 | Hou Yi, Zhang Hong, Zhou Shilin. Convolutional Neural Network-based Image Representation for Visual Loop Closure Detection[C]//2015 IEEE International Conference on Information and Automation. Piscataway, NJ, USA: IEEE, 2015: 2238-2245. |
| 14 | 李维鹏, 张国良, 姚二亮, 等. 基于场景显著区域的改进闭环检测算法[J]. 机器人, 2017, 39(1): 23-35. |
| Li Weipeng, Zhang Guoliang, Yao Erliang, et al. An Improved Loop Closure Detection Algorithm Based on Scene Salient Regions[J]. Robot, 2017, 39(1): 23-35. | |
| 15 | Ganti Pranav, Waslander Steven L. Network Uncertainty Informed Semantic Feature Selection for Visual SLAM[C]//2019 16th Conference on Computer and Robot Vision (CRV). Piscataway, NJ, USA: IEEE, 2019: 121-128. |
| 16 | Tang Jiexiong, Ericson Ludvig, Folkesson John, et al. GCNv2: Efficient Correspondence Prediction for Real-time SLAM[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3505-3512. |
| 17 | Li Dongjiang, Shi Xuesong, Long Qiwei, et al. DXSLAM: A Robust and Efficient Visual SLAM System with Deep Features[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2020: 4958-4965. |
| 18 | Lee J B, Rossi R A, Kim S, et al. Attention Models in Graphs: A Survey[J]. ACM Transactions on Knowledge Discovery from Data, 2019, 13(6): 62. |
| 19 | Zhuang Chenyi, Ma Qiang. Dual Graph Convolutional Networks for Graph-based Semi-supervised Classification[C]//Proceedings of the 2018 World Wide Web Conference. Republic and Canton of Geneva, CHE: International World Wide Web Conferences Steering Committee, 2018: 499-508. |
| 20 | Zhang Xiwu, Su Yan, Zhu Xinhua. Loop Closure Detection for Visual SLAM Systems Using Convolutional Neural Network[C]//2017 23rd International Conference on Automation and Computing (ICAC). Piscataway, NJ, USA: IEEE, 2017: 1-6. |
| 21 | Scarselli Franco, Gori Marco, Ah Chung Tsoi, et al. The Graph Neural Network Model[J]. IEEE Transactions on Neural Networks, 2009, 20(1): 61-80. |
| 22 | 徐冰冰, 岑科廷, 黄俊杰, 等. 图卷积神经网络综述[J]. 计算机学报, 2020, 43(5): 755-780. |
| Xu Bingbing, Cen Keting, Huang Junjie, et al. A Survey on Graph Convolutional Neural Network[J]. Chinese Journal of Computers, 2020, 43(5): 755-780. | |
| 23 | 吴博, 梁循, 张树森, 等. 图神经网络前沿进展与应用[J]. 计算机学报, 2022, 45(1): 35-68. |
| Wu Bo, Liang Xun, Zhang Shusen, et al. Advances and Applications in Graph Neural Network[J]. Chinese Journal of Computers, 2022, 45(1): 35-68. | |
| 24 | Jia Kui, Chan T H, Zeng Zinan, et al. ROML: A Robust Feature Correspondence Approach for Matching Objects in a Set of Images[J]. International Journal of Computer Vision, 2016, 117(2): 173-197. |
| 25 | Sarlin Paul-Edouard, DeTone D, Malisiewicz T, et al. SuperGlue: Learning Feature Matching with Graph Neural Networks[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2020: 4937-4946. |
| 26 | Elmoogy Ahmed, Dong Xiaodai, Lu Tao, et al. Pose-GNN: Camera Pose Estimation System Using Graph Neural Networks[EB/OL]. (2021-03-17) [2022-12-15]. . |
| 27 | Wang Limin, Guo Sheng, Huang Weilin, et al. Places205-VGGNet Models for Scene Recognition[EB/OL]. (2015-08-07) [2022-11-07]. . |
| 28 | Meng Zihang, Ravi S N, Singh V. Physarum Powered Differentiable Linear Programming Layers and Applications[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(10): 8939-8949. |
| 29 | Lin T Y, Maire M, Belongie S, et al. Microsoft COCO: Common Objects in Context[C]//Computer Vision-ECCV 2014. Cham: Springer International Publishing, 2014: 740-755. |
| 30 | Sturm Jürgen, Engelhard Nikolas, Endres Felix, et al. A Benchmark for the Evaluation of RGB-D SLAM Systems[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2012: 573-580. |
| 31 | Geiger A, Lenz P, Stiller C, et al. Vision Meets Robotics: The KITTI Dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 32 | Balntas V, Lenc K, Vedaldi A, et al. HPatches: A Benchmark and Evaluation of Handcrafted and Learned Local Descriptors[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2017: 3852-3861. |
| 33 | DeTone D, Malisiewicz T, Rabinovich A. SuperPoint: Self-supervised Interest Point Detection and Description[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway, NJ, USA: IEEE, 2018: 337-33712. |
| [1] | Lü Jinhu, Jiang Hongyi, Liu Deyuan, Tan Shaolin. Modeling and Simulation of Complex Systems Based on Graph Neural Networks [J]. Journal of System Simulation, 2025, 37(7): 1624-1638. |
| [2] | Wang Ziyi, Zhang Kai, Qian Dianwei, Liu Yuzhen. A DRL⁃based Approach for Distributed Equipment Nodes Selection [J]. Journal of System Simulation, 2025, 37(6): 1565-1573. |
| [3] | Zhou Xiaohui, Li Yanqiang, Wang Yong, Zhao Decai, Yang Xiaoyao. Robot Path Planning Based on Ant Colony Algorithm with Dual Heuristic Information [J]. Journal of System Simulation, 2025, 37(5): 1280-1289. |
| [4] | Yu Die, Bao Baizhong, Si Yan, Duan Jian, Zhan Xiaobin, Shi Tielin. Mobile Robot Path Planning Based on Search-step Optimized A* Algorithm [J]. Journal of System Simulation, 2025, 37(4): 1041-1050. |
| [5] | Lin Guijuan, Li Zihan, Wang Yu. Research on Improved A* Algorithm Path Planning Based on Global Key Point Extraction [J]. Journal of System Simulation, 2025, 37(3): 667-678. |
| [6] | Li Ruoqing, Zhao Yaochi, Hu Zhuhua, Qi Wenlu, Liu Guangfeng. TOHF: A Feature Extractor for Resource-constrained Indoor VSLAM [J]. Journal of System Simulation, 2025, 37(3): 691-703. |
| [7] | Jiang Limei, Chen Xinwei. Visual SLAM Algorithm Based on Feature Point Selection in Dynamic Scenes [J]. Journal of System Simulation, 2025, 37(3): 753-762. |
| [8] | Li Jiongyi, Li Qiang, Zhang Xinwen, Htet Zin Myo, Cai Yongbin. Improved Bidirectional A* Quadratic Path Planning Algorithm for Mobile Robots [J]. Journal of System Simulation, 2025, 37(2): 498-507. |
| [9] | Li Xiaobin, Hu Bing, Yin Chao, Li Bo, Ma Jun. Spatiotemporal Graph Convolution-based Demand Forecasting and Simulation Analysis for Automotive Parts Supply Chain [J]. Journal of System Simulation, 2025, 37(12): 3060-3074. |
| [10] | Zhang Wenkang, Sun Xiaofeng, Zhong Yiping, Yin Yong. Numerical Simulations of Ship Liquid Tank Sloshing Based on Graph Neural Networks [J]. Journal of System Simulation, 2025, 37(12): 3087-3099. |
| [11] | Liu Jia, Zhang Zengwei, Chen Dapeng, Huang Nanxuan, Wang Bin, Song Hong. Improvement of SLAM Localization Accuracy in AR by Enhancing YOLOv8 [J]. Journal of System Simulation, 2025, 37(11): 2701-2713. |
| [12] | Zhang Chi, Wei Wei. Path Planning for Mobile Robots Based on Improved Artificial Potential Field Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2918-2926. |
| [13] | Yang Lanying, Li Chao, Zou Haifeng, Wan Jiangtao, Zhang Renqiang, Liu Hui, Lu Hong. Robot Path Planning Optimization Based on Fusion of Improved Ant Colony Algorithm and A* Algorithm [J]. Journal of System Simulation, 2025, 37(11): 2956-2965. |
| [14] | Luo Yi, Deng Jia. Path Planning for Mobile Robots Based on Improved RRT-Connect and DWA Fusion [J]. Journal of System Simulation, 2025, 37(10): 2545-2556. |
| [15] | Xu Jianmin, Song Lei, Deng Dongdong, Chen Yaoruo, Yang Wei. Path Planning of Mobile Robot Based on the Integration of Multi-scale A* and Optimized DWA Algorithm [J]. Journal of System Simulation, 2025, 37(1): 257-270. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
