

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (12): 2602-2613.doi: 10.16182/j.issn1004731x.joss.22-0873
• Papers • Previous Articles Next Articles
Li Qian( ), Tao Ye(), Li Hui
), Tao Ye(), Li Hui
Received:2022-07-29
Revised:2022-09-26
Online:2023-12-15
Published:2023-12-12
Contact:
Tao Ye
E-mail:1786234631@qq.com;ye.tao@qust.edu.cn
CLC Number:
Li Qian, Tao Ye, Li Hui. Application of Improved Path Tracking Algorithm in Robot SLAM[J]. Journal of System Simulation, 2023, 35(12): 2602-2613.
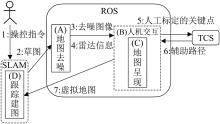
Fig. 1
Auxiliary path generation flow
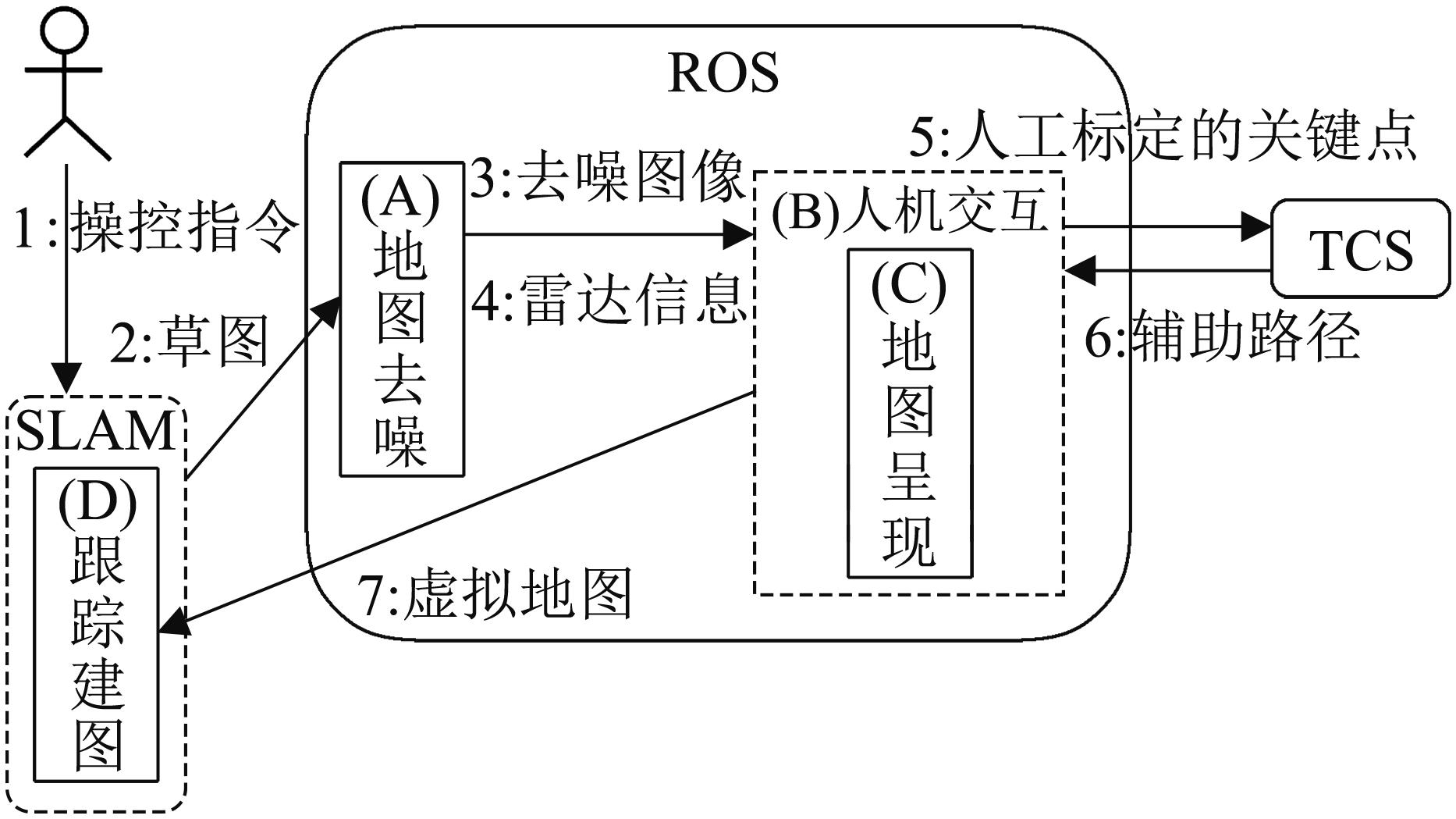
Fig. 2
Auxiliary path generation details
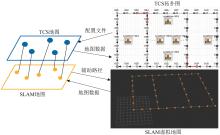
Fig. 3
Bidirectional update of map data
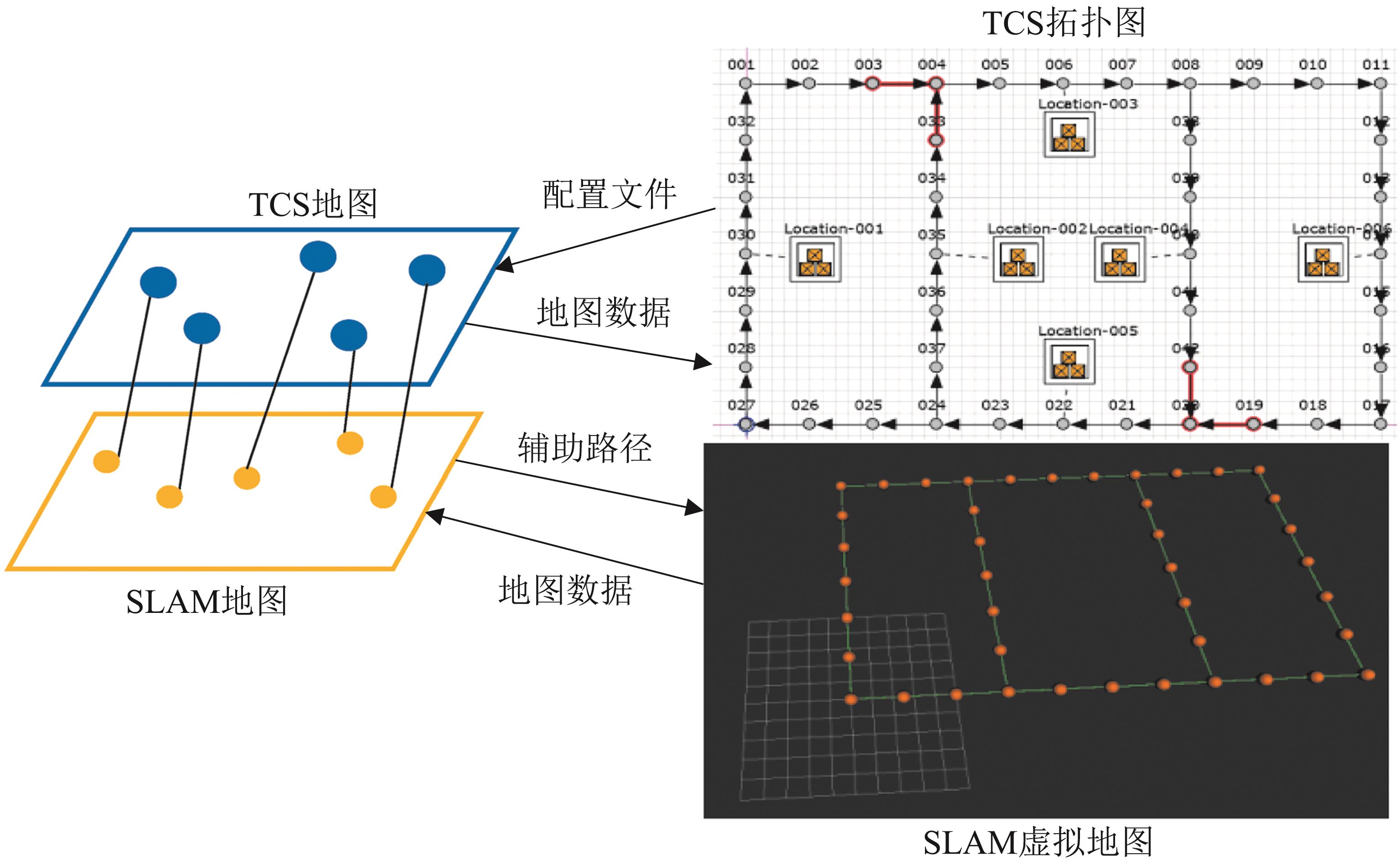
Fig. 4
Flow of denoising module
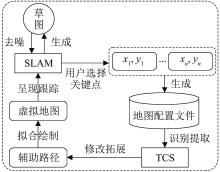
Fig. 5
Interactive map design
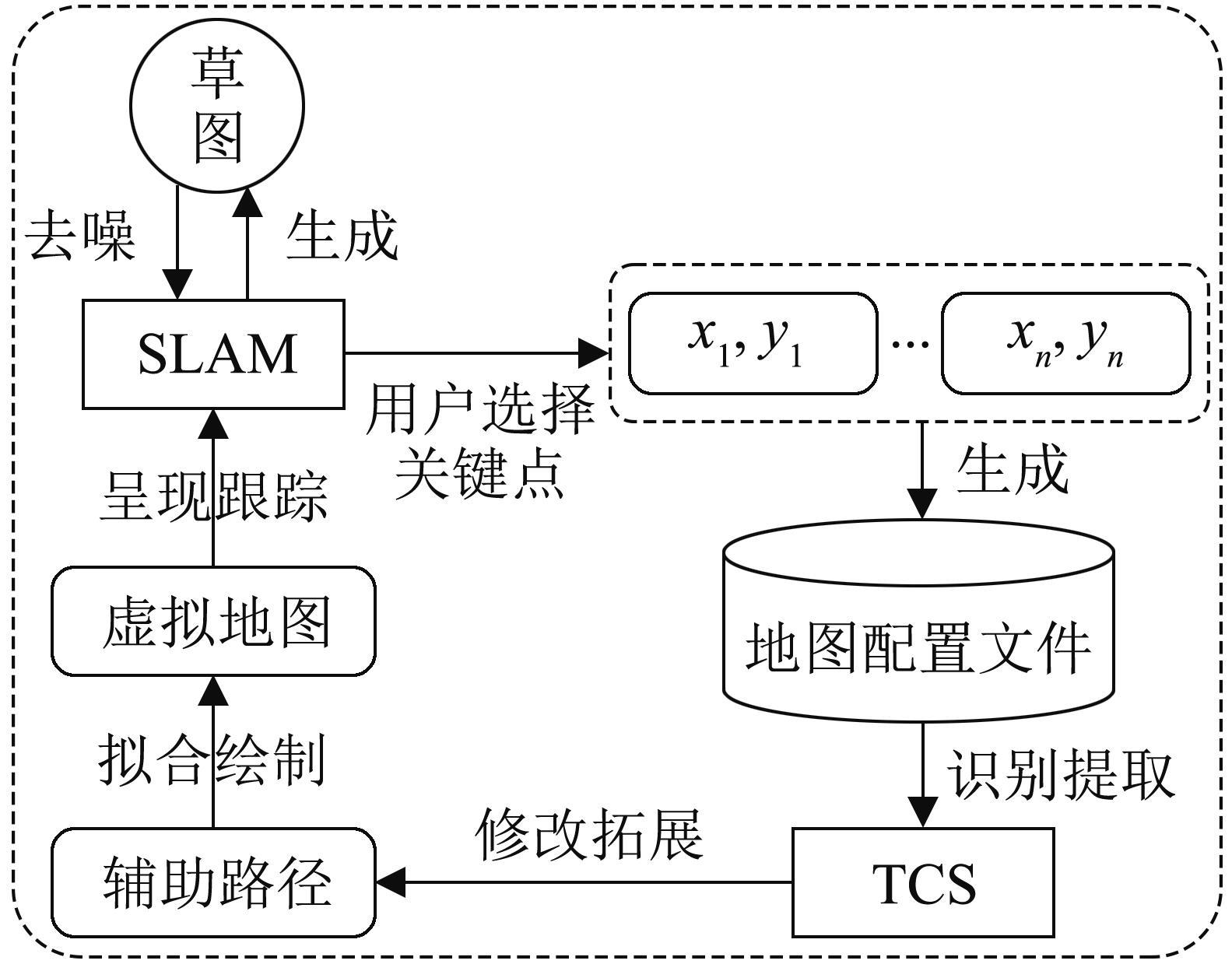

Fig. 6
Comparison of original and optimized paths
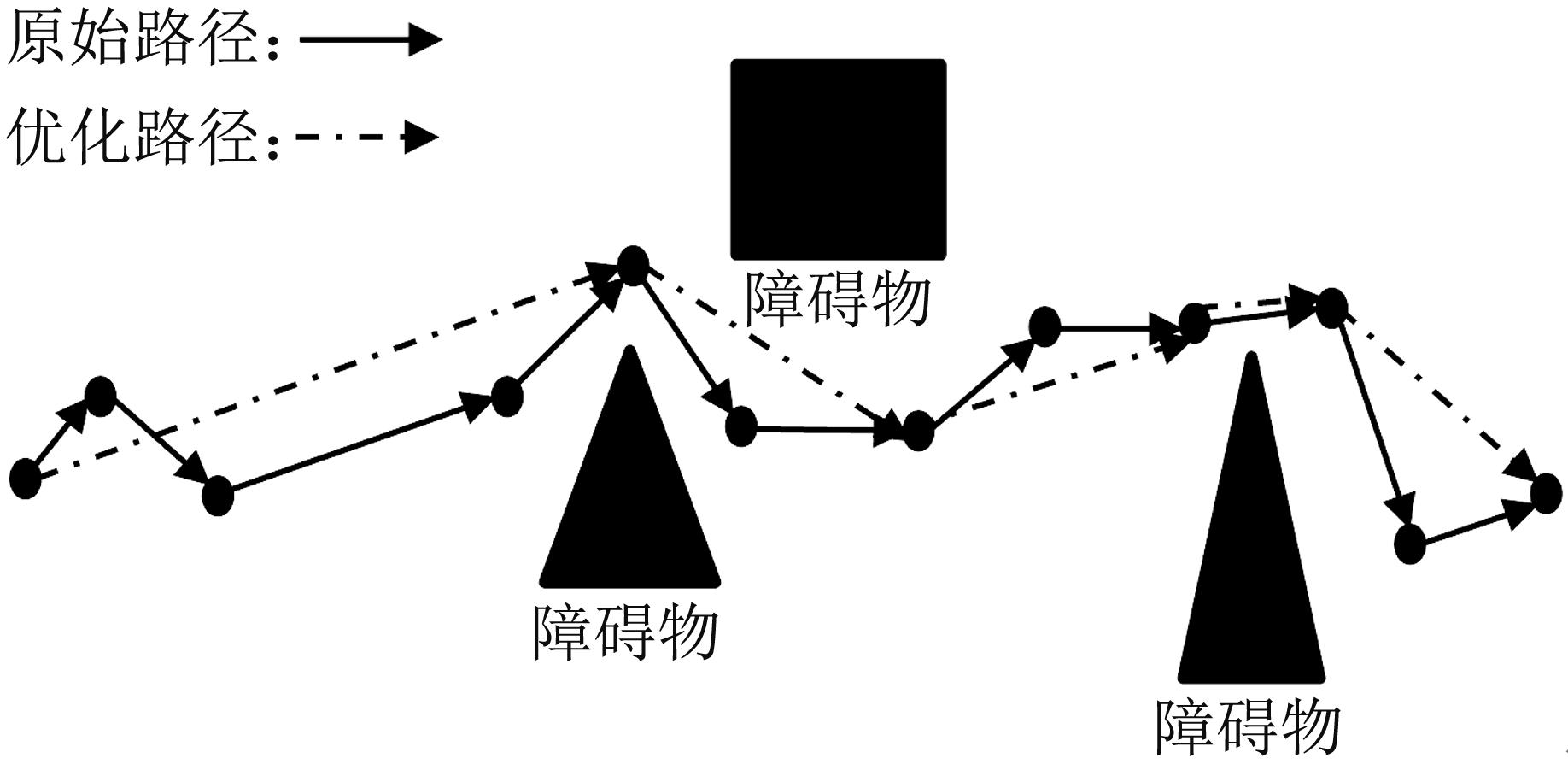
Fig. 7
Tracing and mapping based on auxiliary path
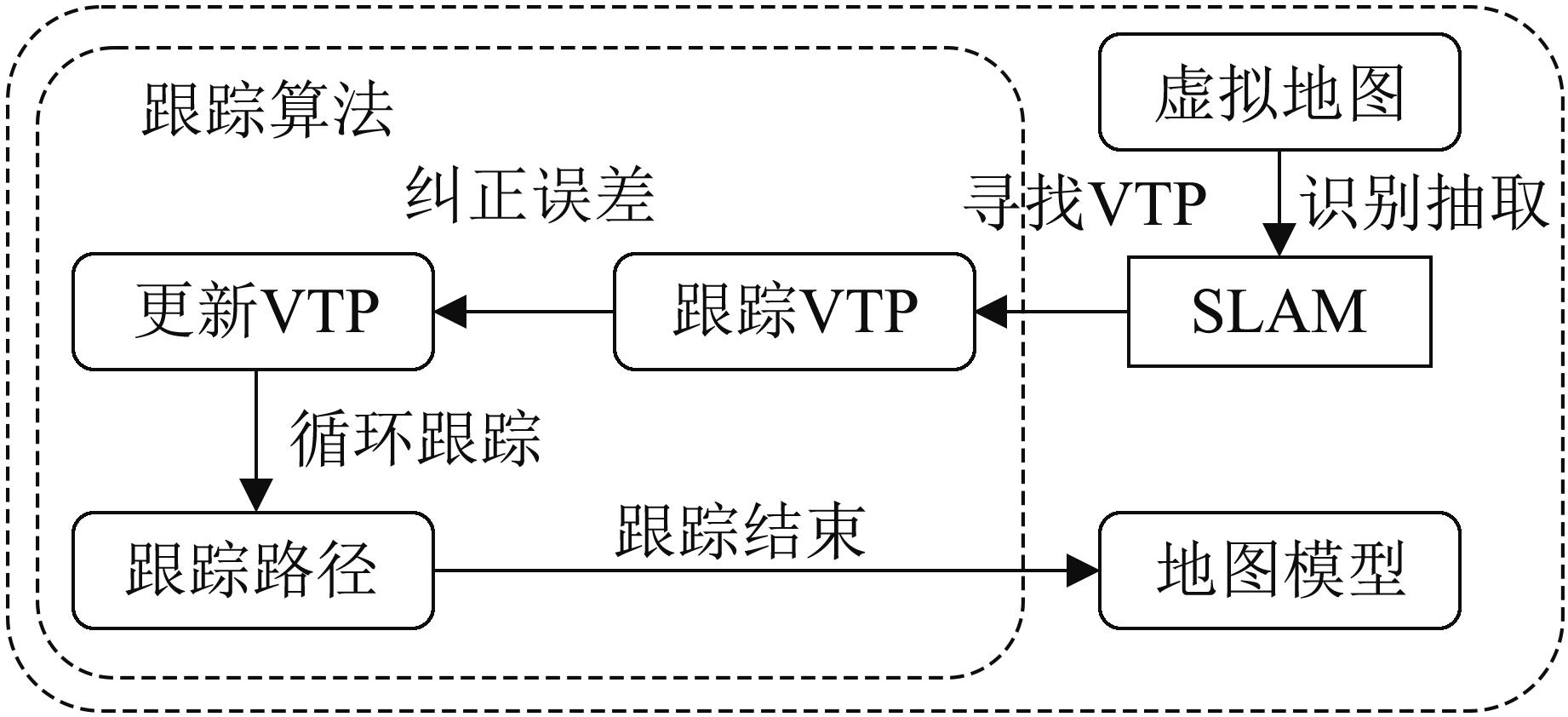
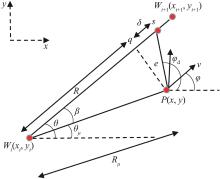
Fig. 8
Path tracking control geometry based on VTP
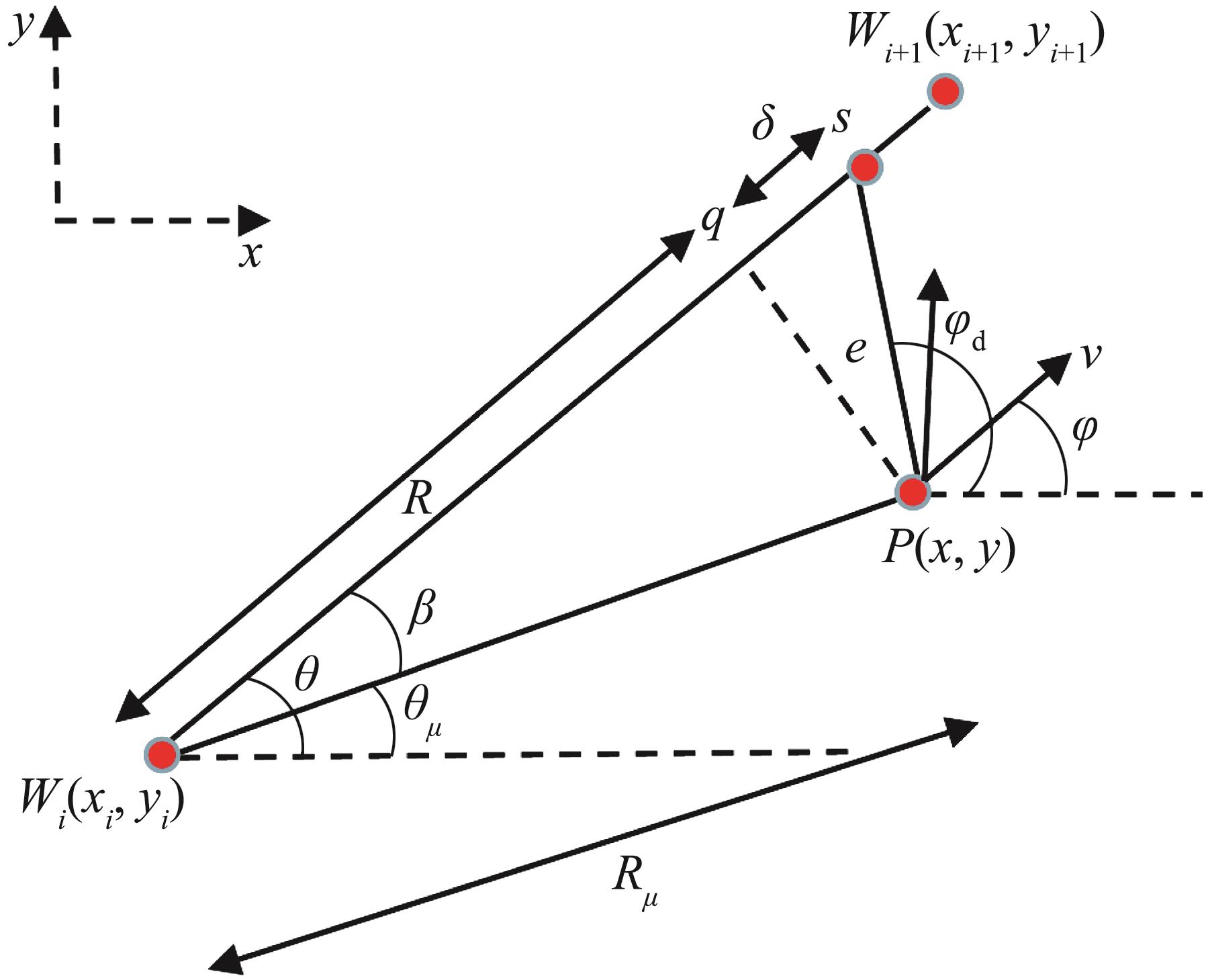
Fig. 9
Forward looking distance and path matching degree
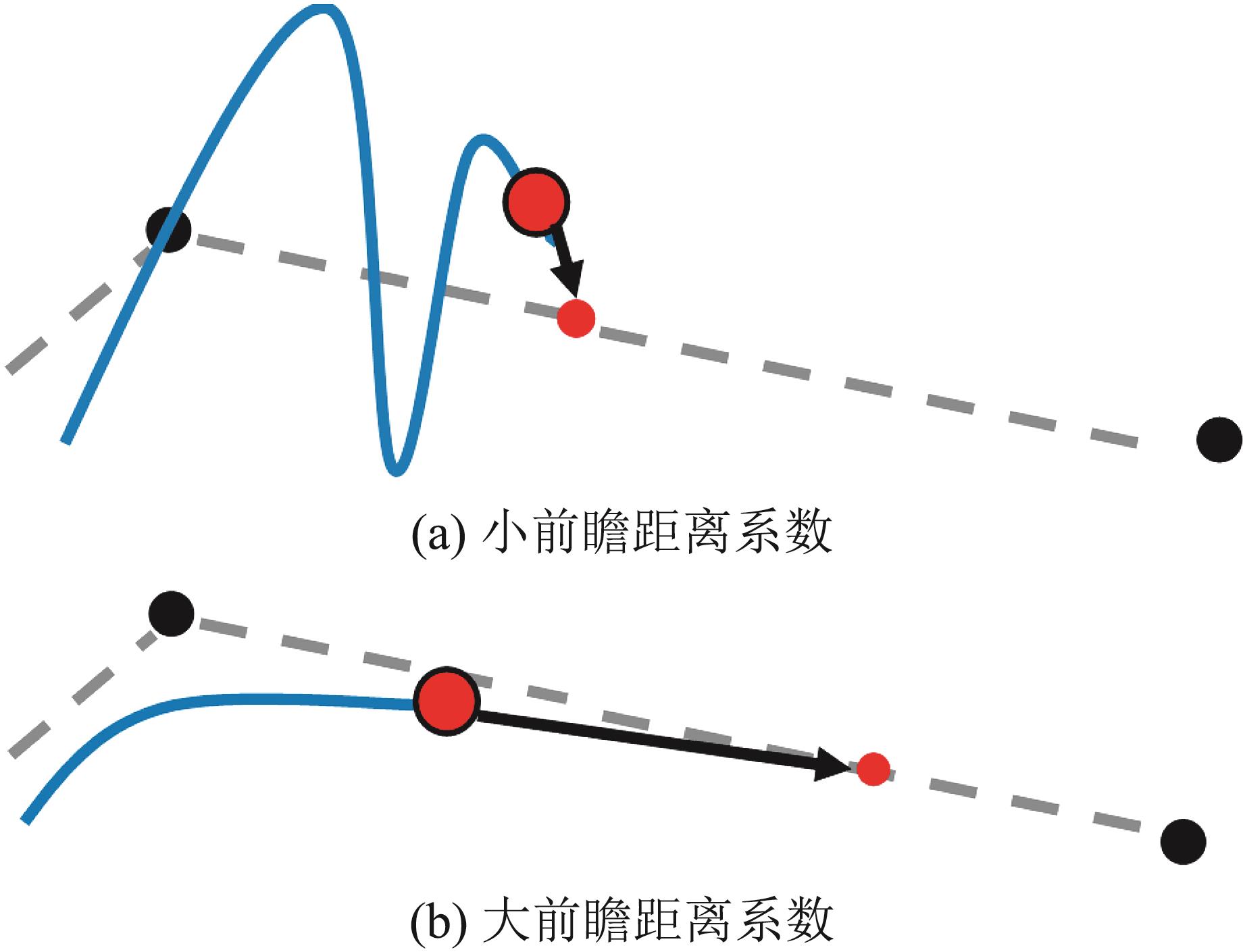
Table 1
Tracking of different forward looking distance coefficients at same speed
| 前瞻距离系数 | 最大横向误差/m | 最大航向误差/rad |
|---|---|---|
| 0.5 | 0.71 | 0.610 |
| 1.0 | 0.11 | 0.070 |
| 1.5 | 0.16 | 0.087 |
| 2.0 | 0.21 | 0.085 |
Fig. 10
Denoising contrast
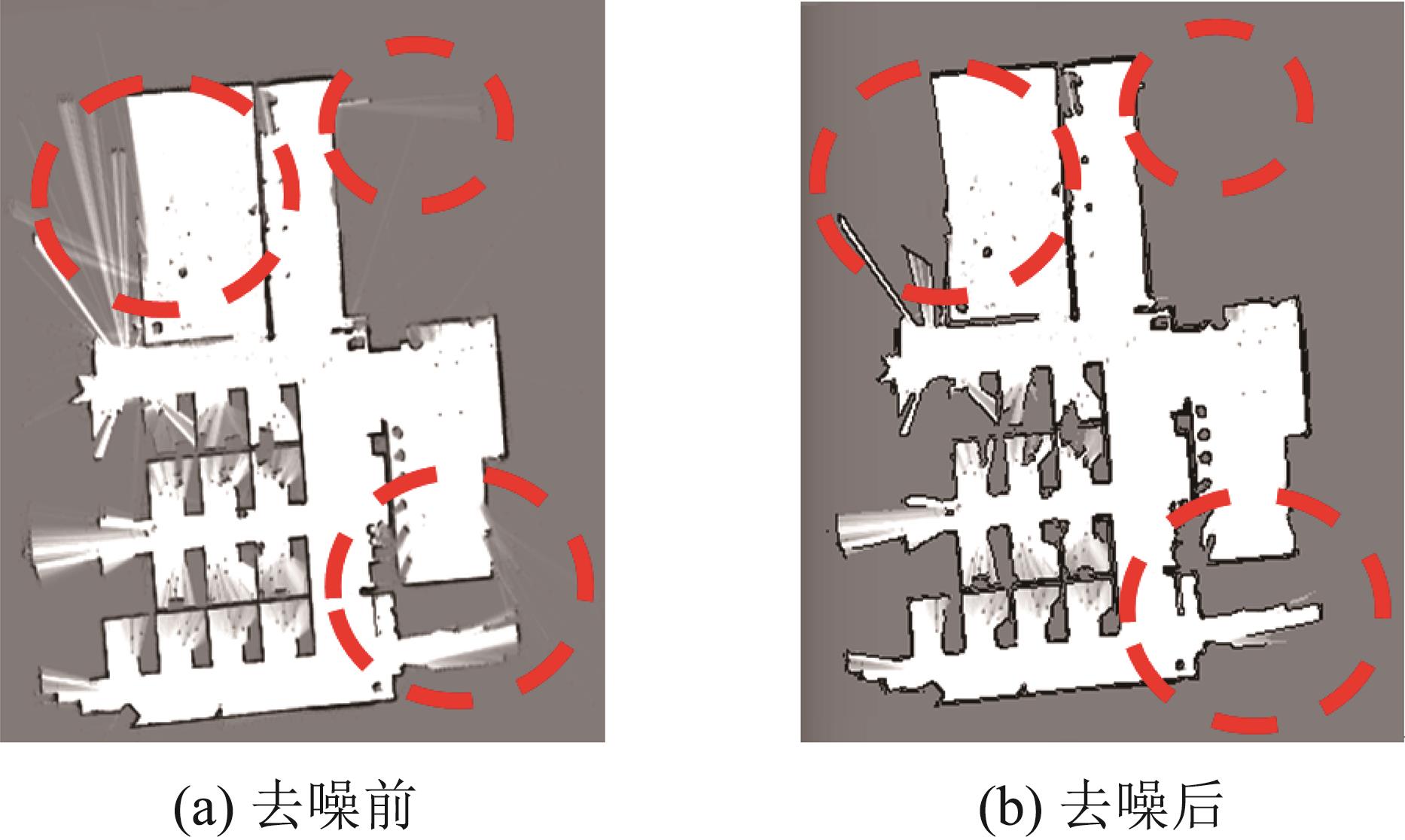
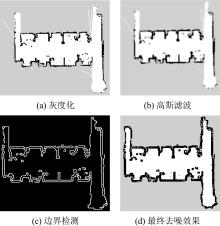
Fig. 11
Result of denoising
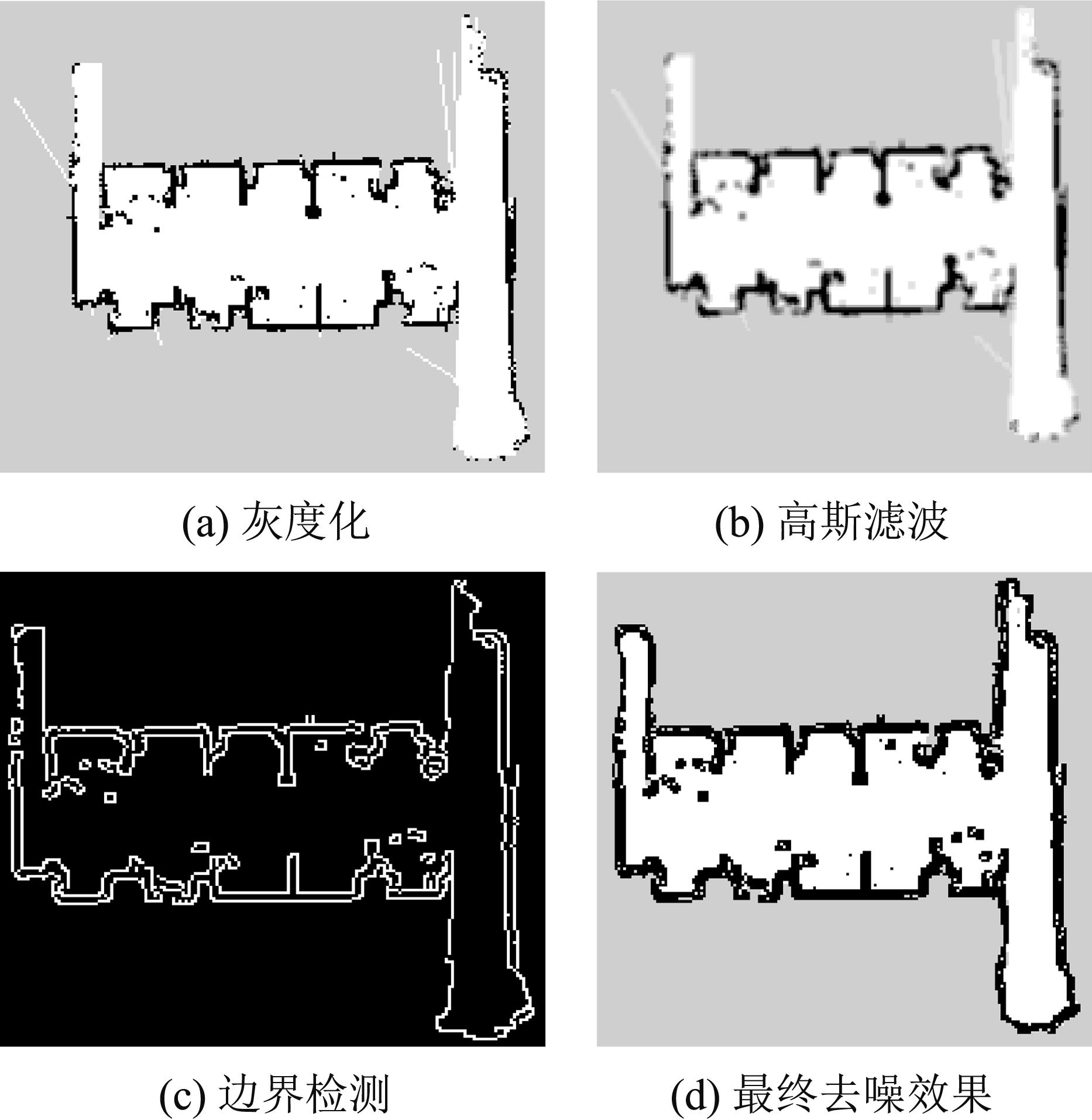
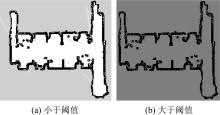
Fig. 12
Threshold judgment
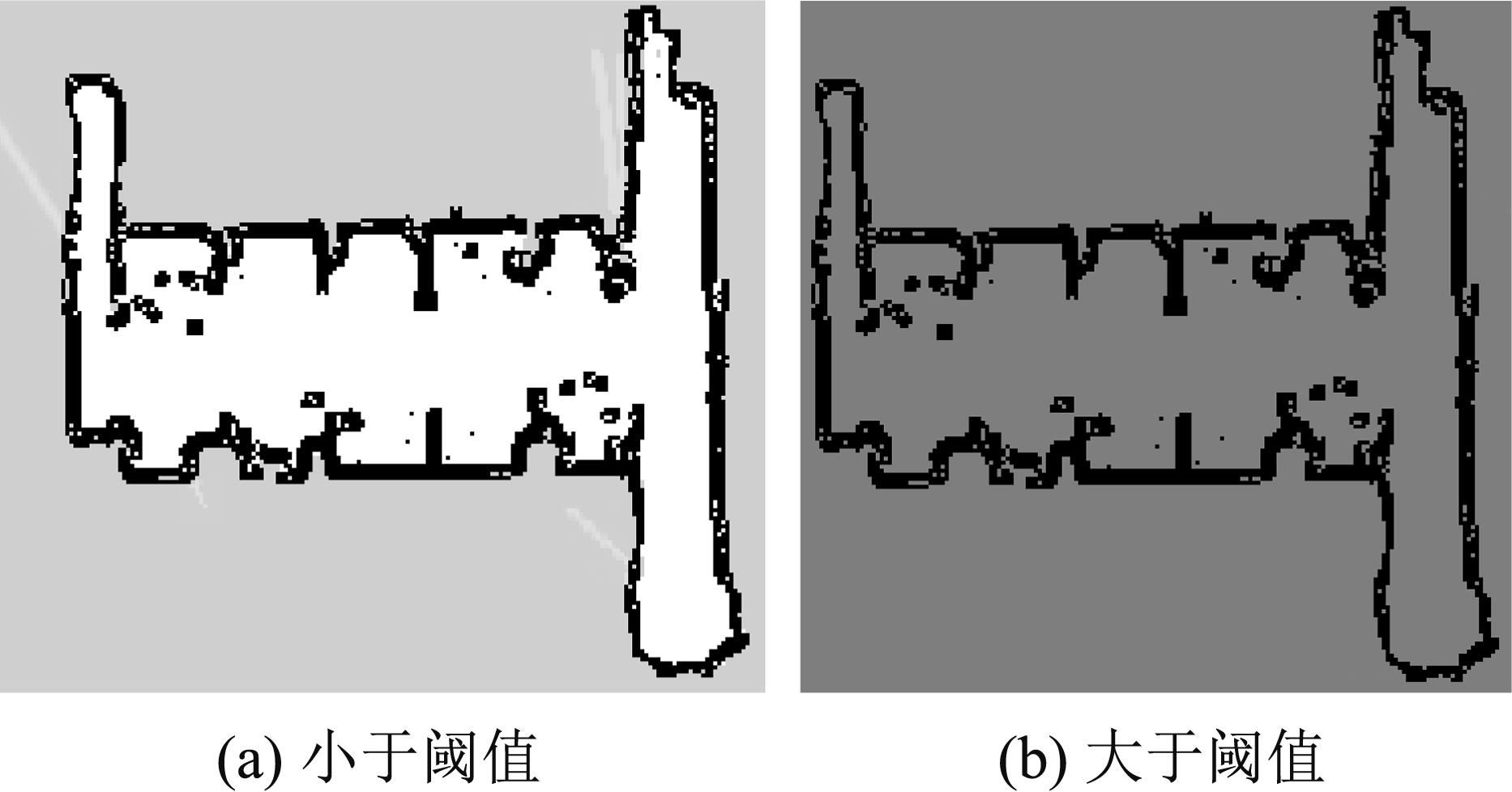

Fig. 13
Effect comparison diagram of path tracking algorithm based on VTP
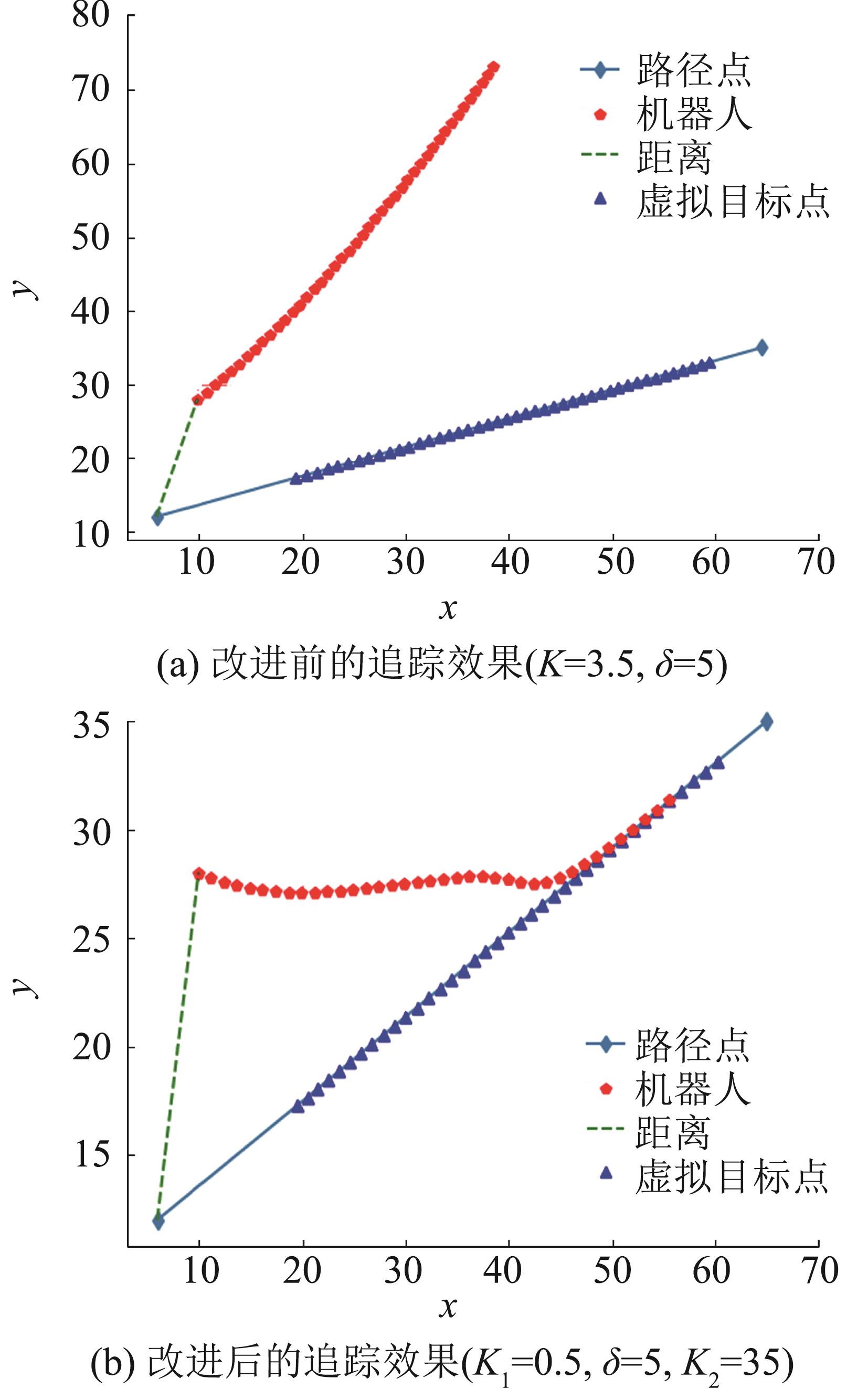
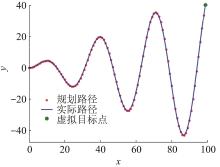
Fig. 14
Tracing effect diagram of path tracing algorithm based on VTP
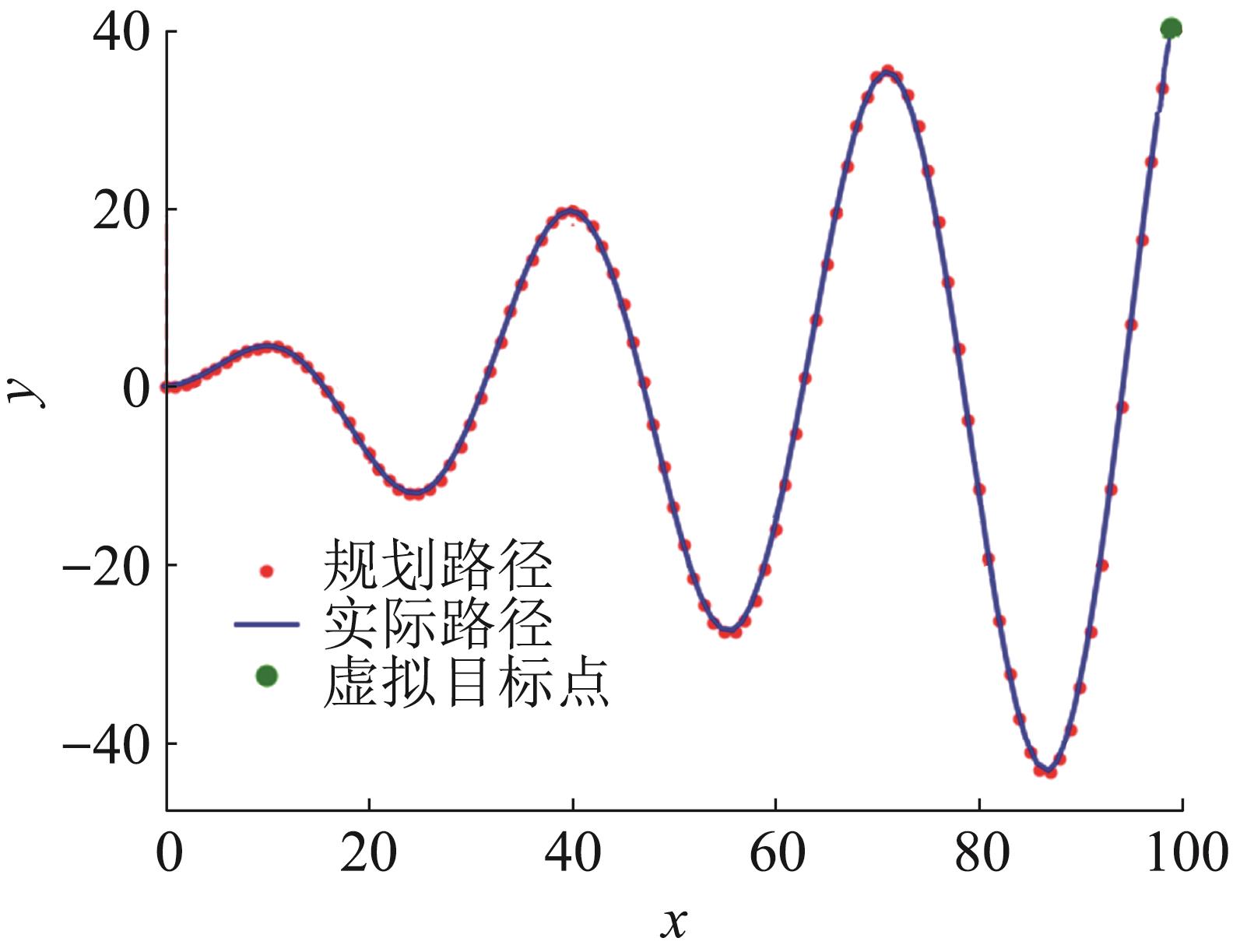
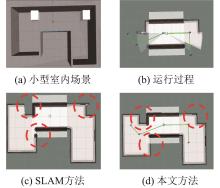
Fig. 15
Virtual simulation experiment of small indoor scene
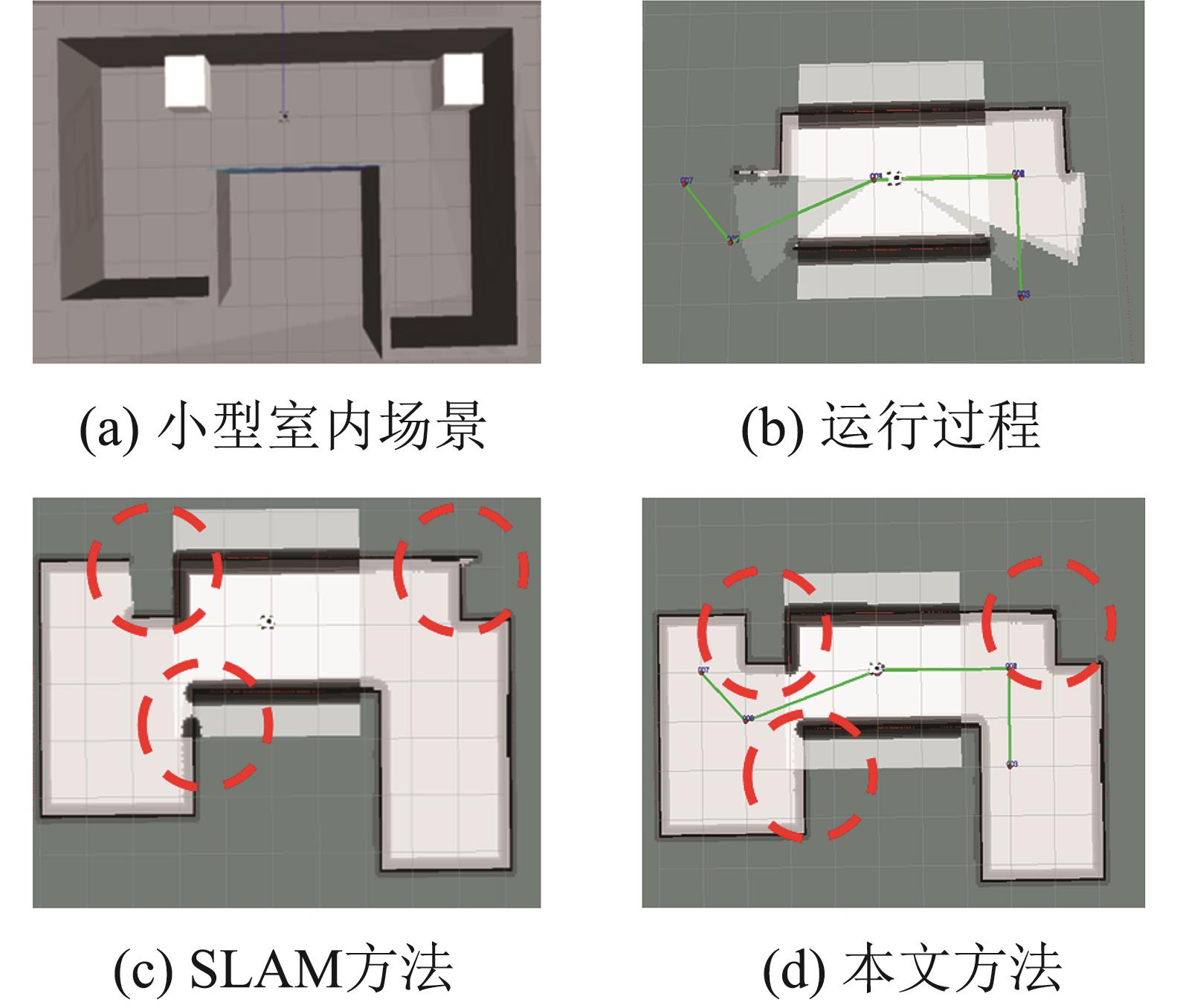
Fig. 16
Virtual simulation experiment of large factory scene
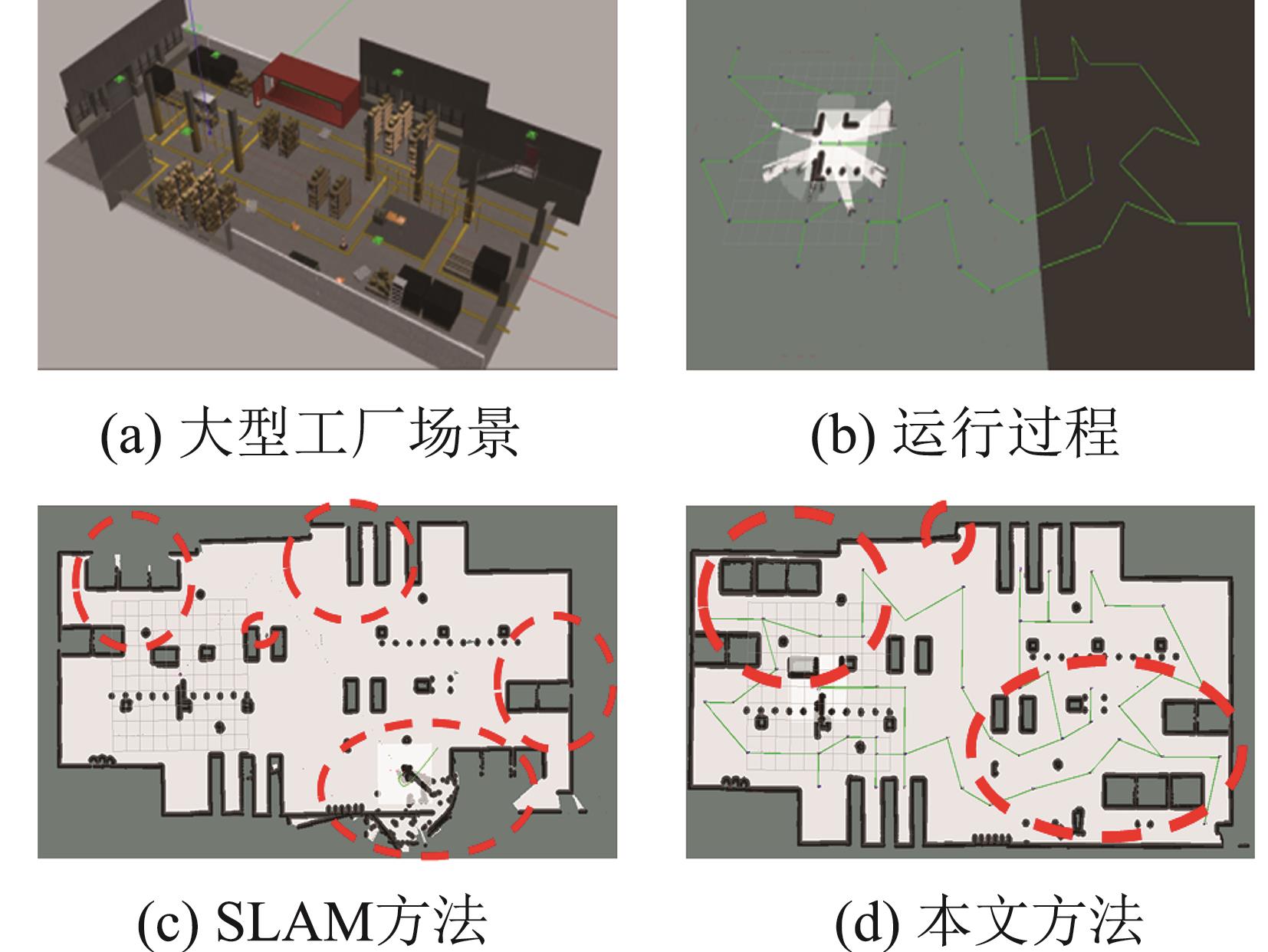
Fig. 17
Virtual simulation experiment of dynamic obstacle scene in large warehouse
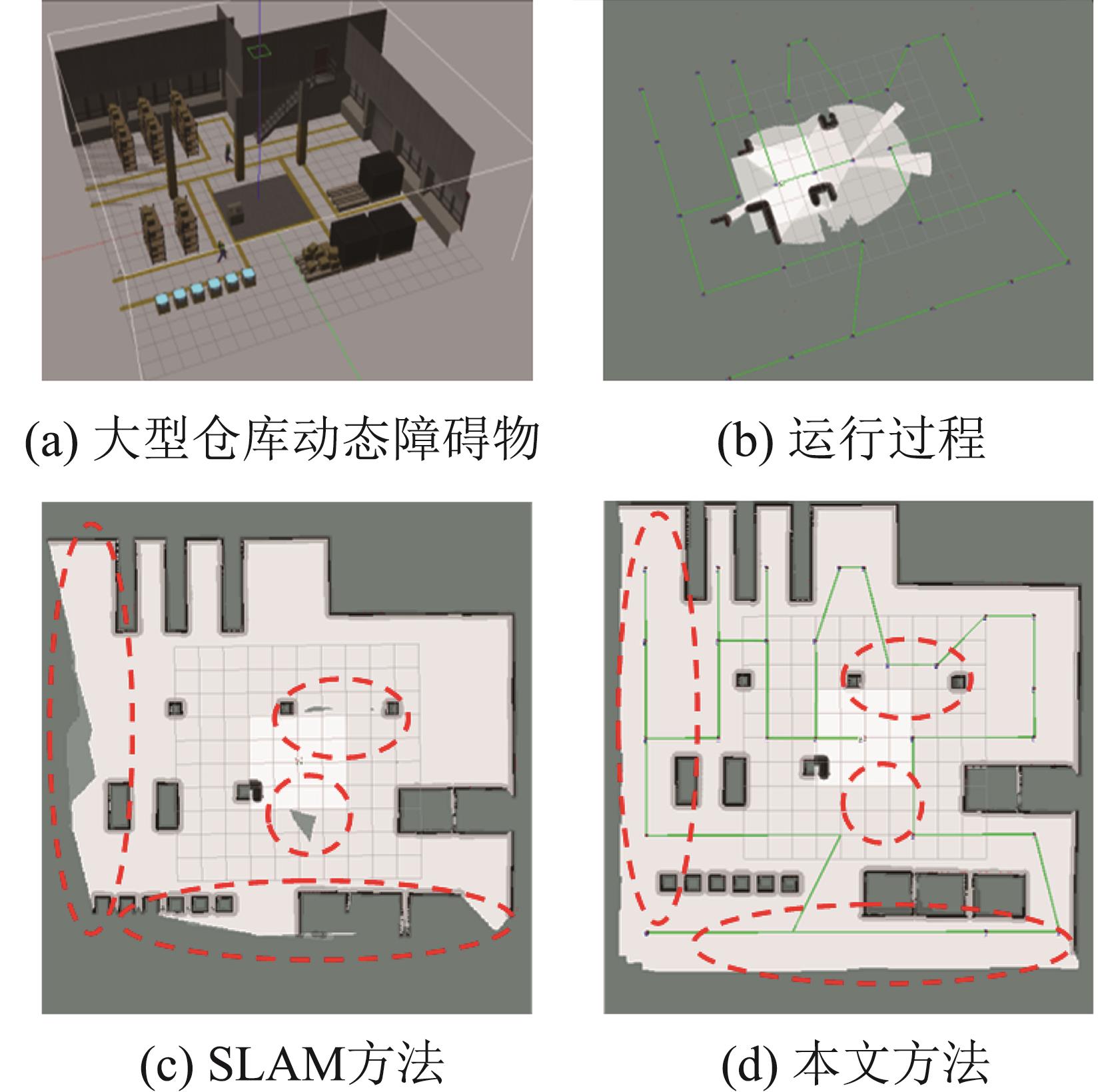
Table 2
Comparison of this method and traditional SLAM
| 场景规模/m2 | 建图方法 | 用时 | I/% | λ/% |
|---|---|---|---|---|
10×6 ( | 本文方法 | 37 min 25 s | 100 | 99.82 |
| SLAM | 50 min 5 s | 93.65 | 93.21 | |
45×22 ( | 本文方法 | 3 h 17 min 3 s | 99.82 | 99.05 |
| SLAM | 3 h 55 min 11 s | 94.09 | 75.45 | |
21×22 ( | 本文方法 | 4 h 19 min 37 s | 99.33 | 97.70 |
| SLAM | 5 h 11 min 32 s | 93.70 | 72.41 |

Fig. 18
Real corridor experiment scenario

Table 3
Comparison of 5 methods
| 使用方法 | 辅助程度 | 平均时间 | I/% | λ/% |
|---|---|---|---|---|
| RRT | 四边形边界 | 15 min 37 s | 74.70 | 77.39 |
| QRCode-SLAM | QRCode | 11 min 49 s | 83.43 | 79.27 |
| V-SLAM | 深度相机 | 9 min 32 s | 70.16 | 63.20 |
| V+Laser-SLAM | Laser+相机 | 10 min 25 s | 86.96 | 89.32 |
| 本文方法 | 辅助路径 | 7 min 4 s | 99.09 | 99.52 |
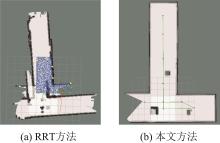
Fig. 19
Building maps and diagrams of results
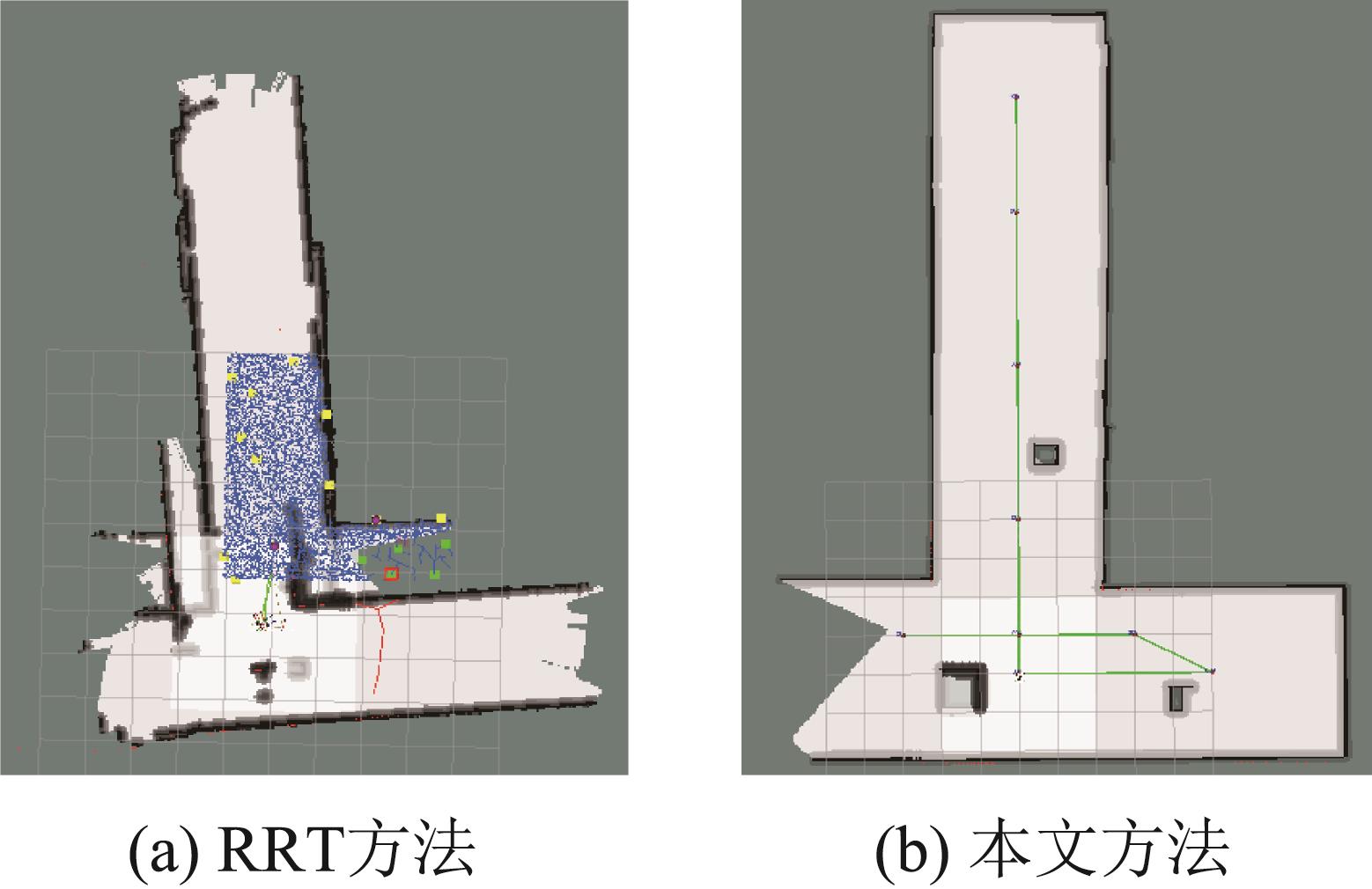

Fig. 20
Slope and rugged environment
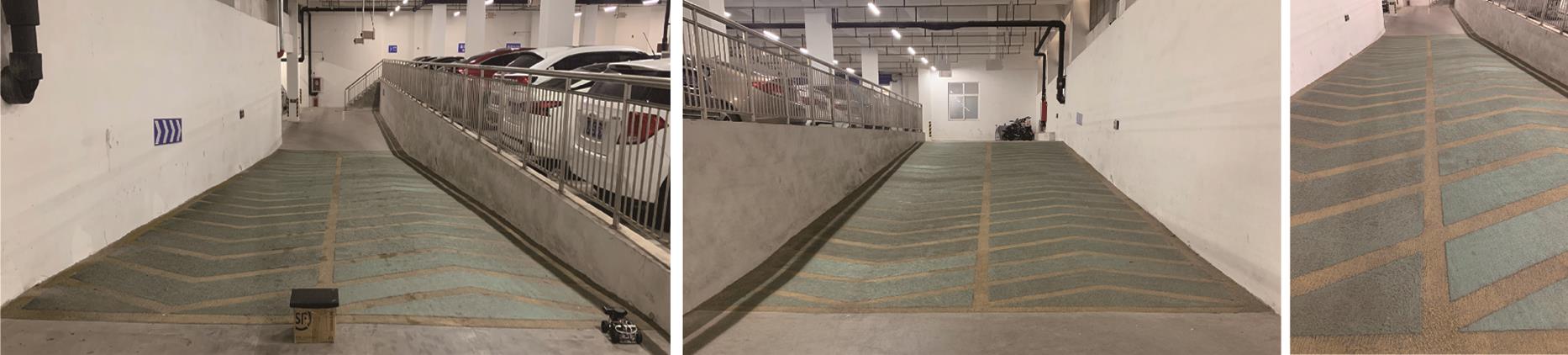
Table 4
Comparison of results of 5 ramp methods
| 使用方法 | 辅助程度 | 平均时间 | I/% | λ/% |
|---|---|---|---|---|
| RRT | 四边形边界 | 11 min 32 s | 67.03 | 59.13 |
| QRCode-SLAM | QRCode | 10 min 8 s | 80.26 | 68.00 |
| V-SLAM | 深度相机 | 5 min 48 s | 64.31 | 53.57 |
| V+Laser-SLAM | Laser+相机 | 6 min 12 s | 85.25 | 90.19 |
| 本文方法 | 辅助路径 | 4 min 15 s | 98.89 | 97.78 |
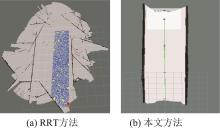
Fig. 21
Ramp map comparison
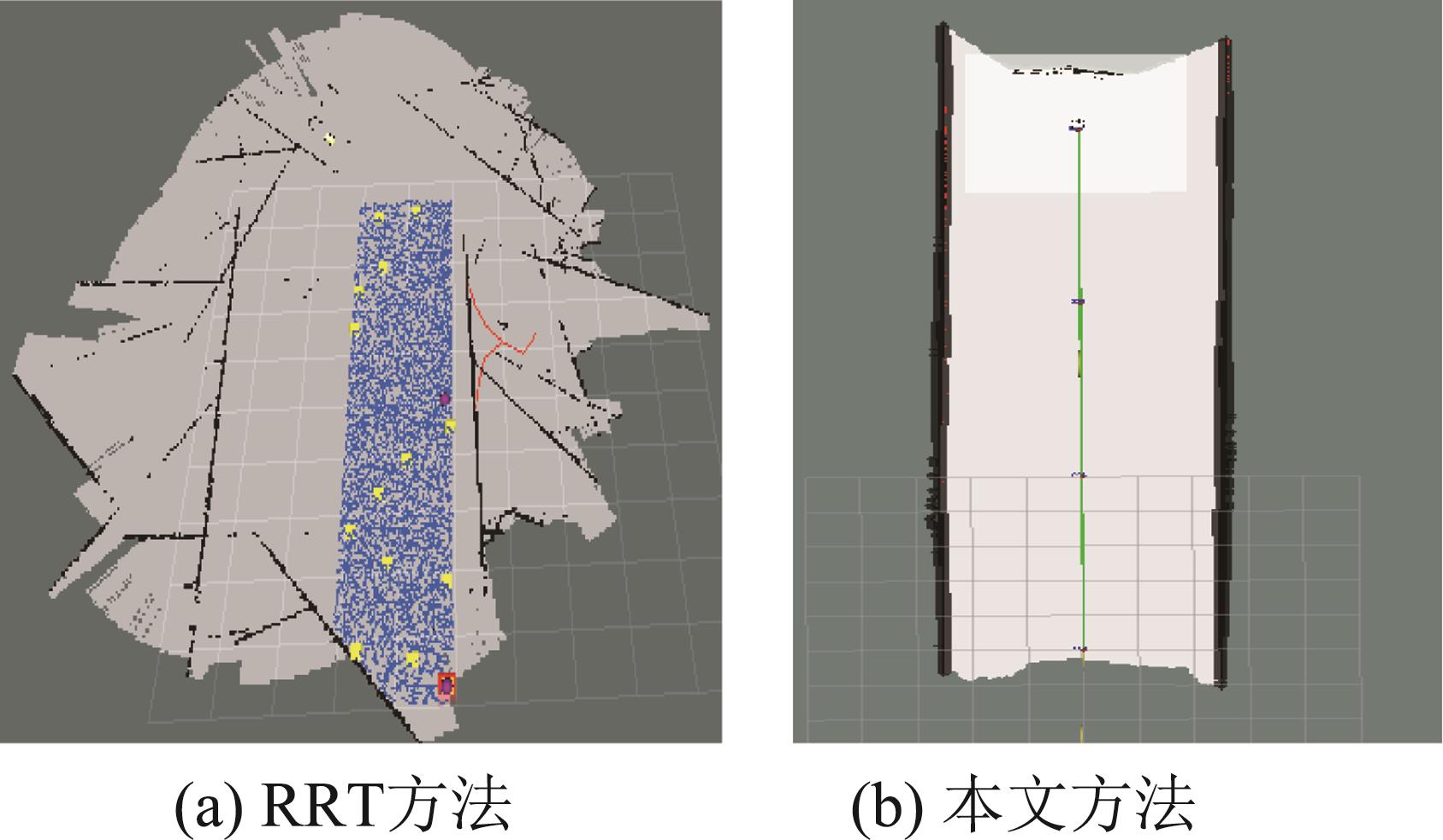
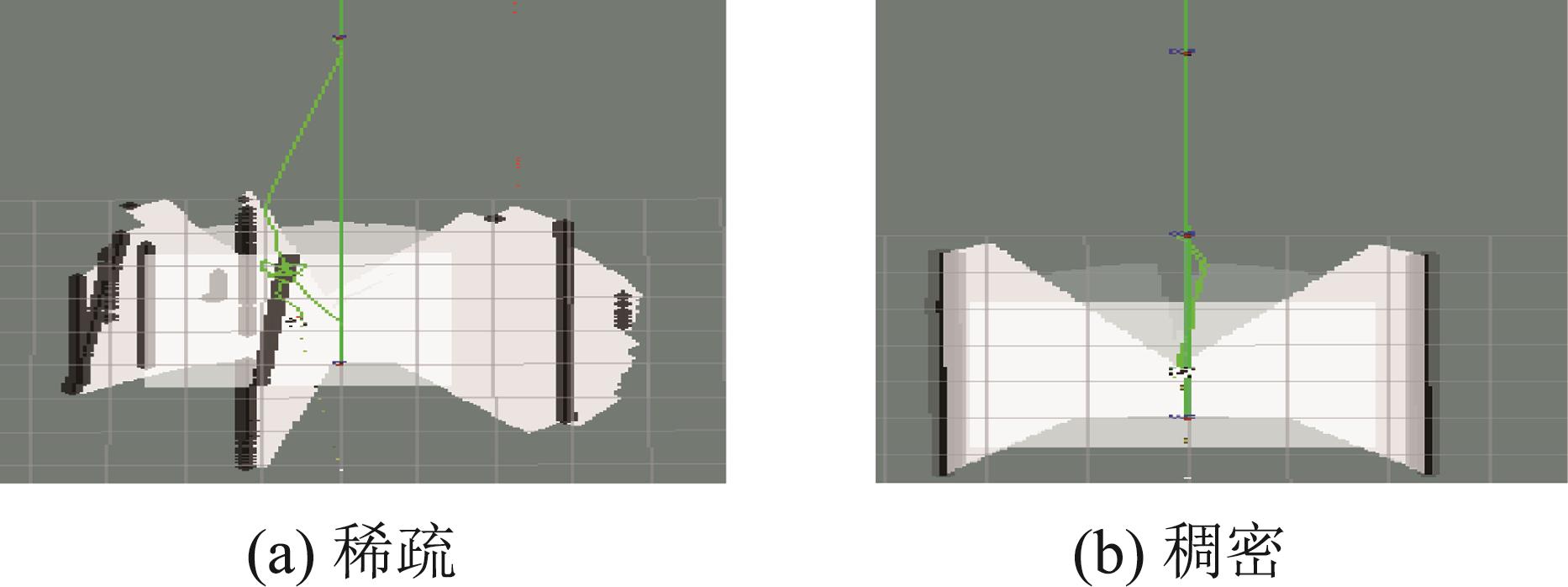
Fig. 22
Comparison between sparse and dense key points
| 1 | Yuan Zhiheng, Yang Zhengmao, Lingling Lü, et al. A Bi-level Path Planning Algorithm for Multi-AGV Routing Problem[J]. Electronics, 2020, 9(9): 1351. |
| 2 | 田野, 陈宏巍, 王法胜, 等. 室内移动机器人的SLAM算法综述[J]. 计算机科学, 2021, 48(9): 223-234. |
| Tian Ye, Chen Hongwei, Wang Fasheng, et al. Overview of SLAM Algorithms for Mobile Robots[J]. Computer Science, 2021, 48(9): 223-234. | |
| 3 | Cadena C, Carlone L, Carrillo H, et al. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-perception Age[J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. |
| 4 | Dong Jing, Ren Xingyu, Han Songlai, et al. UAV Vision Aided INS/Odometer Integration for Land Vehicle Autonomous Navigation[J]. IEEE Transactions on Vehicular Technology, 2022, 71(5): 4825-4840. |
| 5 | Feng Daquan, Wang Chunqi, He Chunlong, et al. Kalman-filter-based Integration of IMU and UWB for High-accuracy Indoor Positioning and Navigation[J]. IEEE Internet of Things Journal, 2020, 7(4): 3133-3146. |
| 6 | Rajamohan D, Kim J, Garratt M, et al. Image Based Localization Under Large Perspective Difference Between Sfm and SLAM Using Split Sim(3) Optimization[J]. Autonomous Robots, 2022, 46(3): 437-449. |
| 7 | Fang Baofu, Mei Gaofei, Yuan Xiaohui, et al. Visual SLAM for Robot Navigation in Healthcare Facility[J]. Pattern Recognition, 2021, 113: 107822. |
| 8 | 李森, 范平清. 兴趣区域地图提取与ROS的多机器人SLAM地图合成研究[J]. 智能计算机与应用, 2022, 12(1): 168-171, 175. |
| Li Sen, Fan Pingqing. Map Extraction of Interest Region and ROS Multi-robot SLAM Mapmerge[J]. Intelligent Computer and Applications, 2022, 12(1): 168-171, 175. | |
| 9 | 徐俊波, 吕宏武, 高子晗. 基于增强现实的智能交互式地图构建方法研究[J]. 自动化应用, 2020(10): 75-77, 82. |
| Xu Junbo, Hongwu Lü, Gao Zihan. Research on the Construction Method of Intelligent Interactive Map Based on Augmented Reality[J]. Automation Application, 2020(10): 75-77, 82. | |
| 10 | 王晨捷, 罗斌, 李成源, 等. 无人机视觉SLAM协同建图与导航[J]. 测绘学报, 2020, 49(6): 767-776. |
| Wang Chenjie, Luo Bin, Li Chengyuan, et al. The Collaborative Mapping and Navigation Based on Visual SLAM in UAV Platform[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(6): 767-776. | |
| 11 | 王桐, 尚光涛, 高山. 基于启发式的多机器人SLAM地图融合方法研究[J]. 系统仿真学报, 2022, 34(7): 1449-1458. |
| Wang Tong, Shang Guangtao, Gao Shan. Research on Multi-robot SLAM Map FusionMethod Based on Heuristics[J]. Journal of System Simulation, 2022, 34(7): 1449-1458. | |
| 12 | Zhao Leyang, Yan Li, Hu Xiao, et al. Efficient and High Path Quality Autonomous Exploration and Trajectory Planning of UAV in an Unknown Environment[J]. ISPRS International Journal of Geo-Information, 2021, 10(10): 631. |
| 13 | Becerra I, Yervilla-Herrera H, Antonio E, et al. On the Local Planners in the RRT* for Dynamical Systems and Their Reusability for Compound Cost Functionals[J]. IEEE Transactions on Robotics, 2022, 38(2): 887-905. |
| 14 | Liu Shuang, Li Shenghao, Pang Luchao, et al. Autonomous Exploration and Map Construction of a Mobile Robot Based on the TGHM Algorithm[J]. Sensors, 2020, 20(2): 490. |
| 15 | Yang Yang, Li Yankai, Wen Xing, et al. An Optimal Goal Point Determination Algorithm for Automatic Navigation of Agricultural Machinery: Improving the Tracking Accuracy of the Pure Pursuit Algorithm[J]. Computers and Electronics in Agriculture, 2022, 194: 106760. |
| 16 | Li Cong, Yuan Ruiman, Gao Hong, et al. Characteristics of Blue-green Laser Downlink Cross-media Transmission Under Different Weather Conditions[J]. Acta Photonica Sinica, 2021, 50(12): 1201003. |
| 17 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| Xiong Lu, Yang Xing, Zhuo Guirong, et al. Review on Motion Control of Autonomous Vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| 18 | Wang Lihui, Chen Zongliang, Zhu Wenxing. An Improved Pure Pursuit Path Tracking Control Method Based on Heading Error Rate[J]. Industrial Robot: The International Journal of Robotics Research and Application, 2022, 49(5): 973-980. |
| 19 | 岳伟韬, 苏婧, 谷志珉, 等. 占据栅格地图的最佳栅格大小与地图精度[J]. 机器人, 2020, 42(2): 199-206. |
| Yue Weitao, Su Jing, Gu Zhimin, et al. Best Grid Size of the Occupancy Grid Map and Its Accuracy[J]. Robot, 2020, 42(2): 199-206. | |
| 20 | Savci K, Stove A G, Francesco De Palo, et al. Noise Radar-overview and Recent Developments[J]. IEEE Aerospace and Electronic Systems Magazine, 2020, 35(9): 8-20. |
| 21 | Du Gaoming, Wu Jiting, Cao Hongfang, et al. A Real-time Effective Fusion-based Image Defogging Architecture on FPGA[J]. ACM Transactions on Multimedia Computing, Communications, and Applications, 2021, 17(3): 93. |
| 22 | Wen Junlin, Zhu Yufan, Liu Jianbo, et al. Smartphone-based Surface Plasmon Resonance Sensing Platform for Rapid Detection of Bacteria[J]. RSC Advances, 2022, 12(21): 13045-13051. |
| 23 | Suryanarayana G, Chandran K, Khalaf O I, et al. Accurate Magnetic Resonance Image Super-resolution Using Deep Networks and Gaussian Filtering in the Stationary Wavelet Domain[J]. IEEE Access, 2021, 9: 71406-71417. |
| 24 | Wu Fangsheng, Zhu Changan, Xu Jinxiu, et al. Research on Image Text Recognition Based on Canny Edge Detection Algorithm and K-means Algorithm[J]. International Journal of System Assurance Engineering and Management, 2022, 13(1): 72-80. |
| 25 | 佘丽萱, 康佳, 王楠, 等. 一种新的棉花根系图像阈值分割方法[J]. 河北大学学报(自然科学版), 2022, 42(2): 124-130. |
| She Lixuan, Kang Jia, Wang Nan, et al. A New Threshold Segmentation Method for Cotton Root Images[J]. Journal of Heibei University(Natural Science Edition), 2022, 42(2): 124-130. | |
| 26 | Kim J, Qi Meng, Kim M, et al. Biogas Reforming Integrated With PEM Electrolysis Via Oxygen Storage Process for Green Hydrogen Production: From Design to Robust Optimization[J]. Energy Conversion and Management, 2022, 251: 115021. |
| 27 | Uddin S, Haque I, Lu Haohui, et al. Comparative Performance Analysis of K-nearest Neighbour(KNN) Algorithm and Its Different Variants for Disease Prediction[J]. Scientific Reports, 2022, 12(1): 6256. |
| [1] | Zhang Yi, Xu Kai, Li Shuilin, Chen Dejun, Zeng Yunxiu, Peng Yong. Key Problems of Intent Recognition Research: A Survey on Activity, Plan and Goal Recognition [J]. Journal of System Simulation, 2026, 38(3): 620-650. |
| [2] | Liu Dayong, Dong Zhiming, Gao Jiancheng. Military Metaverse: Conceptual Connotation, Construction and Application Framework, Key Issues [J]. Journal of System Simulation, 2026, 38(1): 29-44. |
| [3] | Li Xiangyang, Zhang Zhili, Wang Rui, Wang Xiao, Chi Cheng. Research on Simulation Training Technology for Special Vehicle Command Based on Gesture Behavior Cognition Interaction [J]. Journal of System Simulation, 2025, 37(7): 1804-1822. |
| [4] | Chen Qinghua, Liang Zuoyou, Guan Weijuan, Ji Jiadong, Liu Ping. Construction Method of Digital Twin System for High-low Temperature Test Chamber [J]. Journal of System Simulation, 2025, 37(6): 1400-1411. |
| [5] | Li Yongling, Liu Lingzhi, Zhou Baishun, Lei Jingfa, Zhang Miao, Zhao Ruhai. Operation System for Simulation Roadheader Based on Visual Motion Capture [J]. Journal of System Simulation, 2025, 37(6): 1531-1541. |
| [6] | Li Ruoqing, Zhao Yaochi, Hu Zhuhua, Qi Wenlu, Liu Guangfeng. TOHF: A Feature Extractor for Resource-constrained Indoor VSLAM [J]. Journal of System Simulation, 2025, 37(3): 691-703. |
| [7] | Jiang Limei, Chen Xinwei. Visual SLAM Algorithm Based on Feature Point Selection in Dynamic Scenes [J]. Journal of System Simulation, 2025, 37(3): 753-762. |
| [8] | Liu Jia, Zhang Zengwei, Chen Dapeng, Huang Nanxuan, Wang Bin, Song Hong. Improvement of SLAM Localization Accuracy in AR by Enhancing YOLOv8 [J]. Journal of System Simulation, 2025, 37(11): 2701-2713. |
| [9] | Li Xinmeng, Xu Kai, Hu Yue, Huang Hesong, Yin Quanjun. Research on CGF-oriented Natural Language Interaction Framework [J]. Journal of System Simulation, 2025, 37(11): 2853-2866. |
| [10] | Yao Wanye, Pang Zewei, Sun Peijie, Wang Zhu. Research on ORB-SLAM Algorithm Based on Windowed Matching Estimation [J]. Journal of System Simulation, 2024, 36(9): 2032-2042. |
| [11] | Ge Chengpeng, Zhao Dong, Wang Rui, Ma Qinghua. Section Point Cloud Denoising Method Based on Enhanced DBSCAN and Distance Consensus Evaluation [J]. Journal of System Simulation, 2024, 36(8): 1800-1809. |
| [12] | Liu Weiliang, Yan Qianwen, Zhang Qiliang, Liu Shuai, Liu Changliang, Kang Jiayao, Wang Xin. Optimal Scheduling of Vehicle-network Interaction Based on Interval Stackelberg Game of Virtual Power Plant [J]. Journal of System Simulation, 2024, 36(7): 1559-1572. |
| [13] | Liu Jinhui, Chen Mengyuan, Han Pengpeng, Chen Hebao, Zhang Yukun. A Graph Neural Network Visual SLAM Algorithm for Large-angle View Motion [J]. Journal of System Simulation, 2024, 36(5): 1043-1060. |
| [14] | Shi Lanxi, Yan Wenxu, Ni Hongyu, Zhao Feng. Research on Dynamic Scene SLAM Based on Improved Object Detection [J]. Journal of System Simulation, 2024, 36(4): 1028-1042. |
| [15] | Wang Ning, Liang Xiaolong, Zhang Jiaqiang, Hou Yueqi, Yang Aiwu. Research on Cross-domain Unmanned Swarm Cooperative Anti-submarine Search Method [J]. Journal of System Simulation, 2024, 36(4): 817-824. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
