

Journal of System Simulation ›› 2024, Vol. 36 ›› Issue (4): 1028-1042.doi: 10.16182/j.issn1004731x.joss.22-1332
• Papers • Previous Articles
Shi Lanxi1( ), Yan Wenxu1(), Ni Hongyu2, Zhao Feng2
), Yan Wenxu1(), Ni Hongyu2, Zhao Feng2
Received:2022-11-09
Revised:2023-01-06
Online:2024-04-15
Published:2024-04-18
Contact:
Yan Wenxu
E-mail:2066760176@qq.com;ywx01@jiangnan.edu.cn
CLC Number:
Shi Lanxi, Yan Wenxu, Ni Hongyu, Zhao Feng. Research on Dynamic Scene SLAM Based on Improved Object Detection[J]. Journal of System Simulation, 2024, 36(4): 1028-1042.
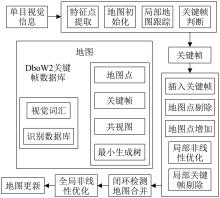
Fig. 1
Structure of ORB-SLAM3 system
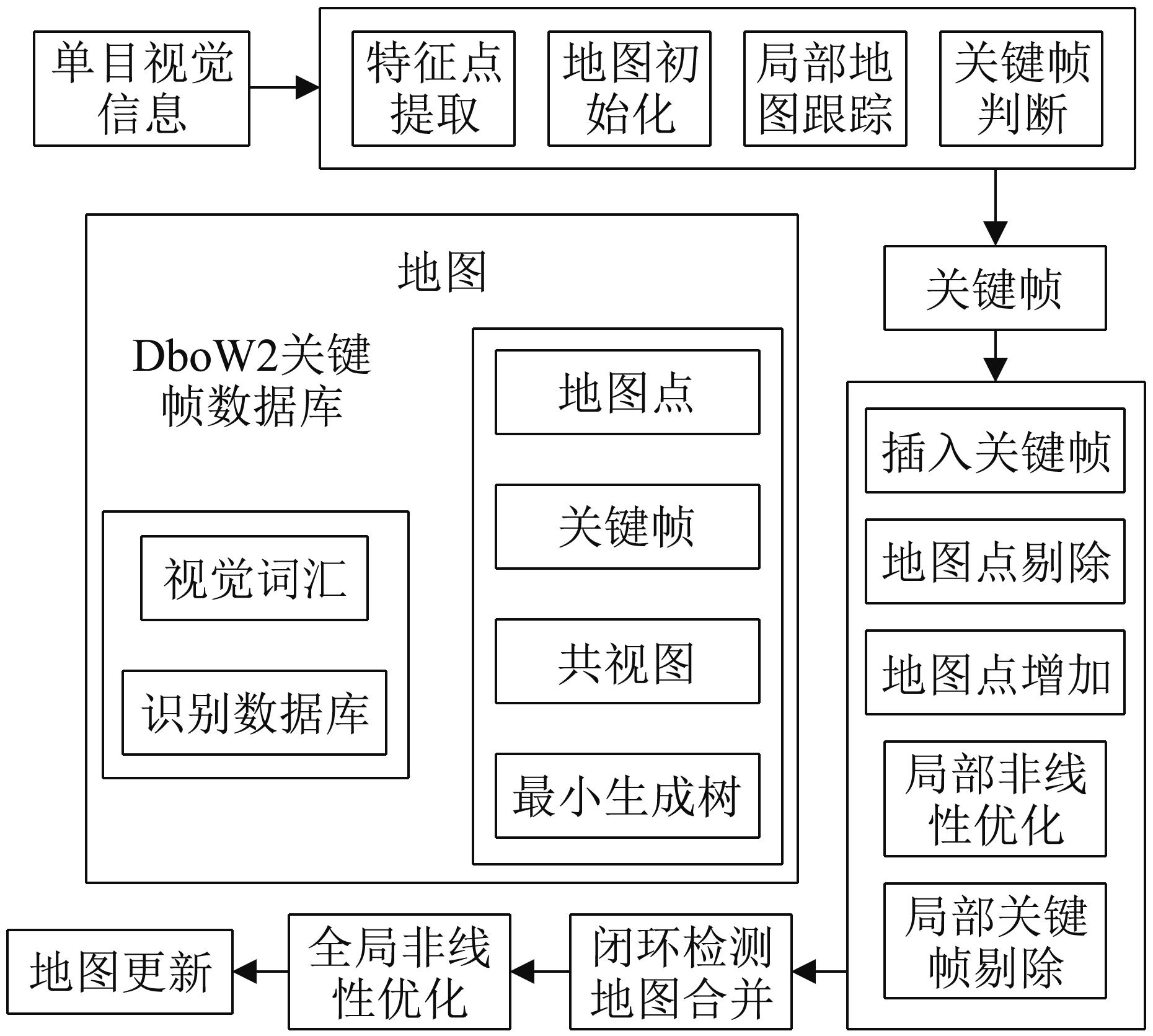

Fig. 2
Improved trace threads
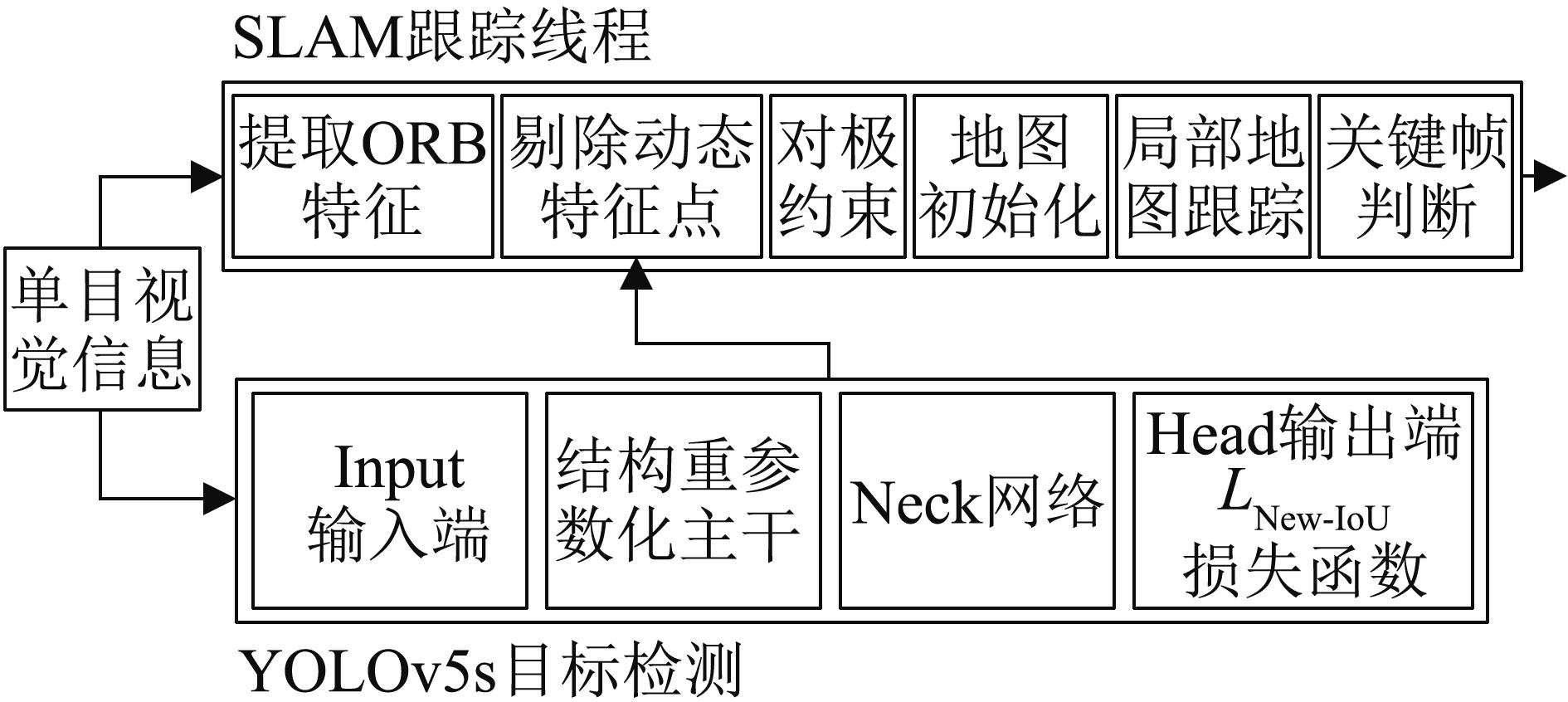
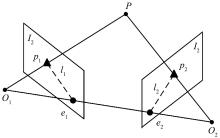
Fig. 3
Schematic of epipolar geometry
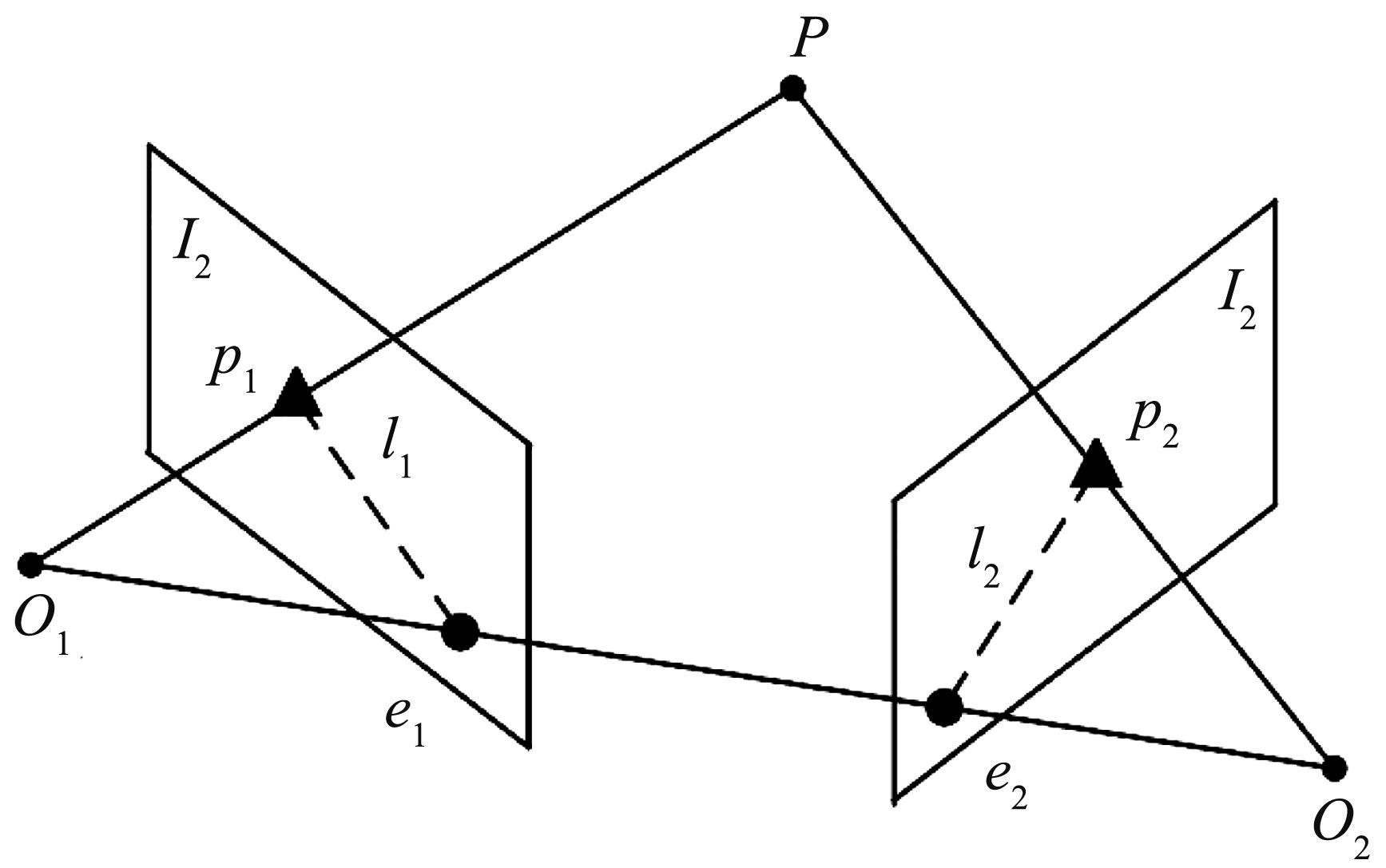

Fig. 4
Interference of dynamic target to epipolar geometry
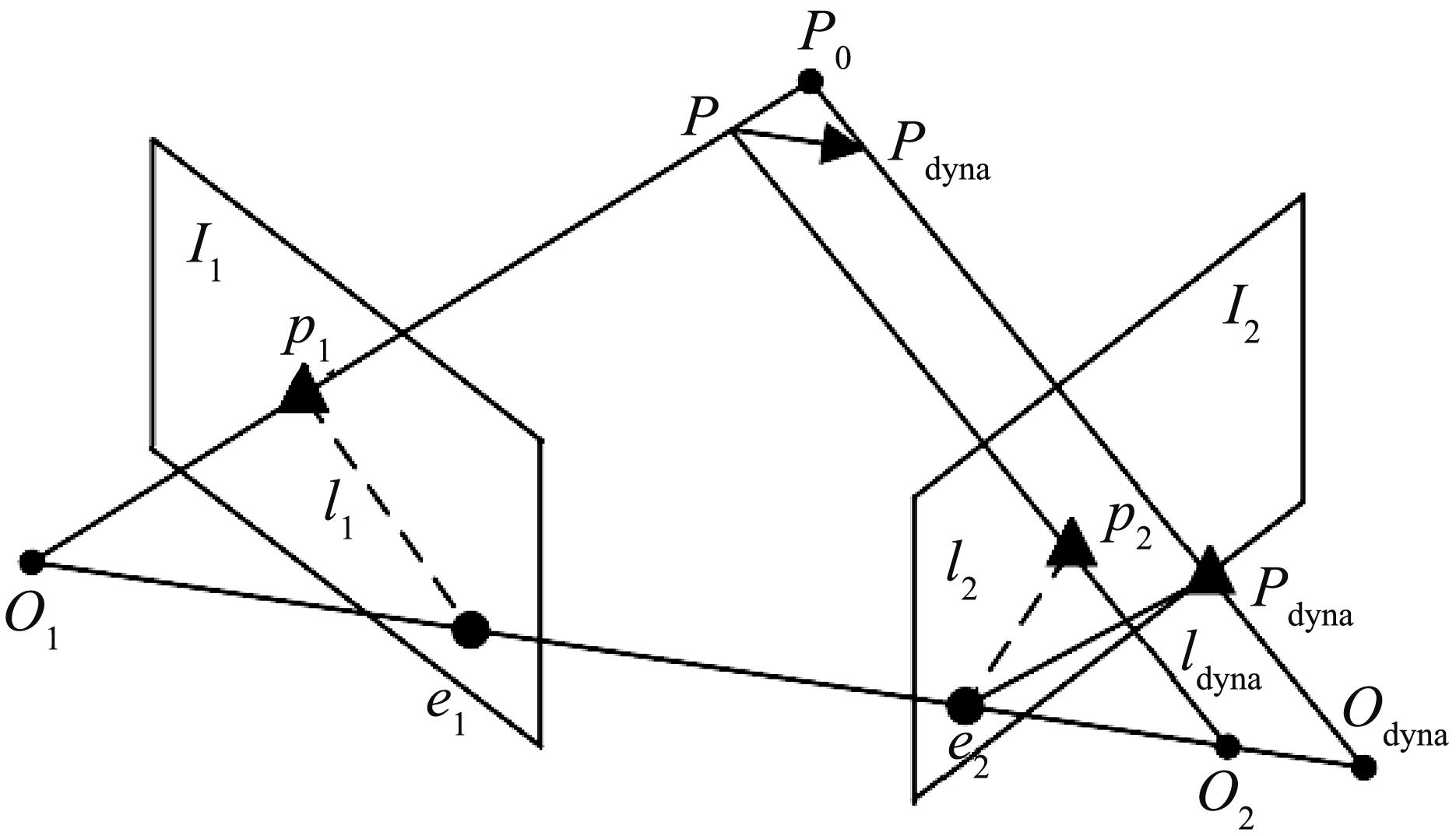

Fig. 5
Network structure
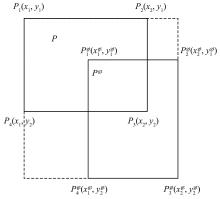
Fig. 6
Impact of distance on loss function
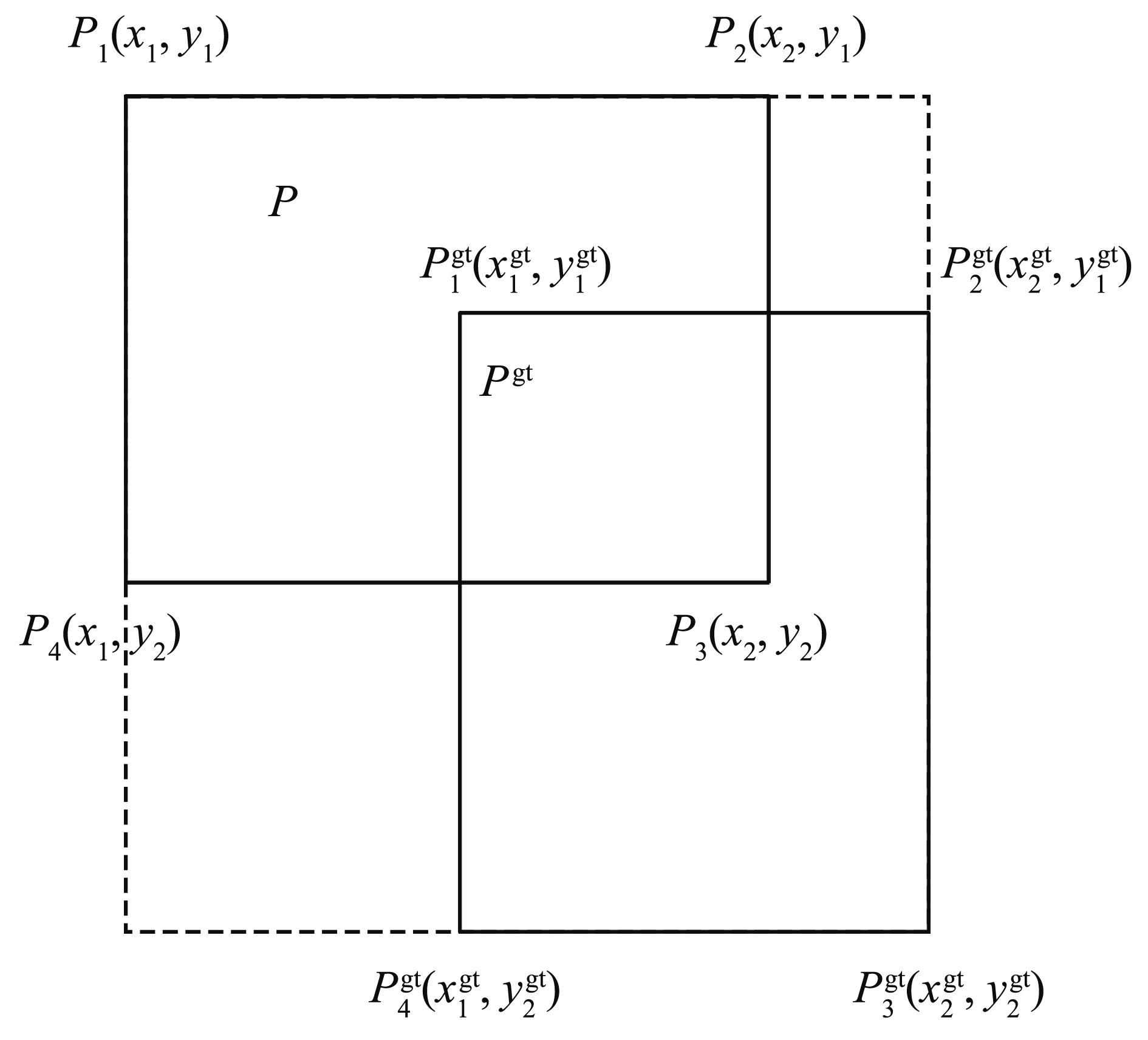
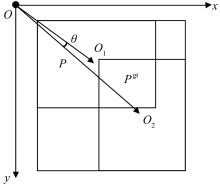
Fig. 7
Impact of angle on loss function
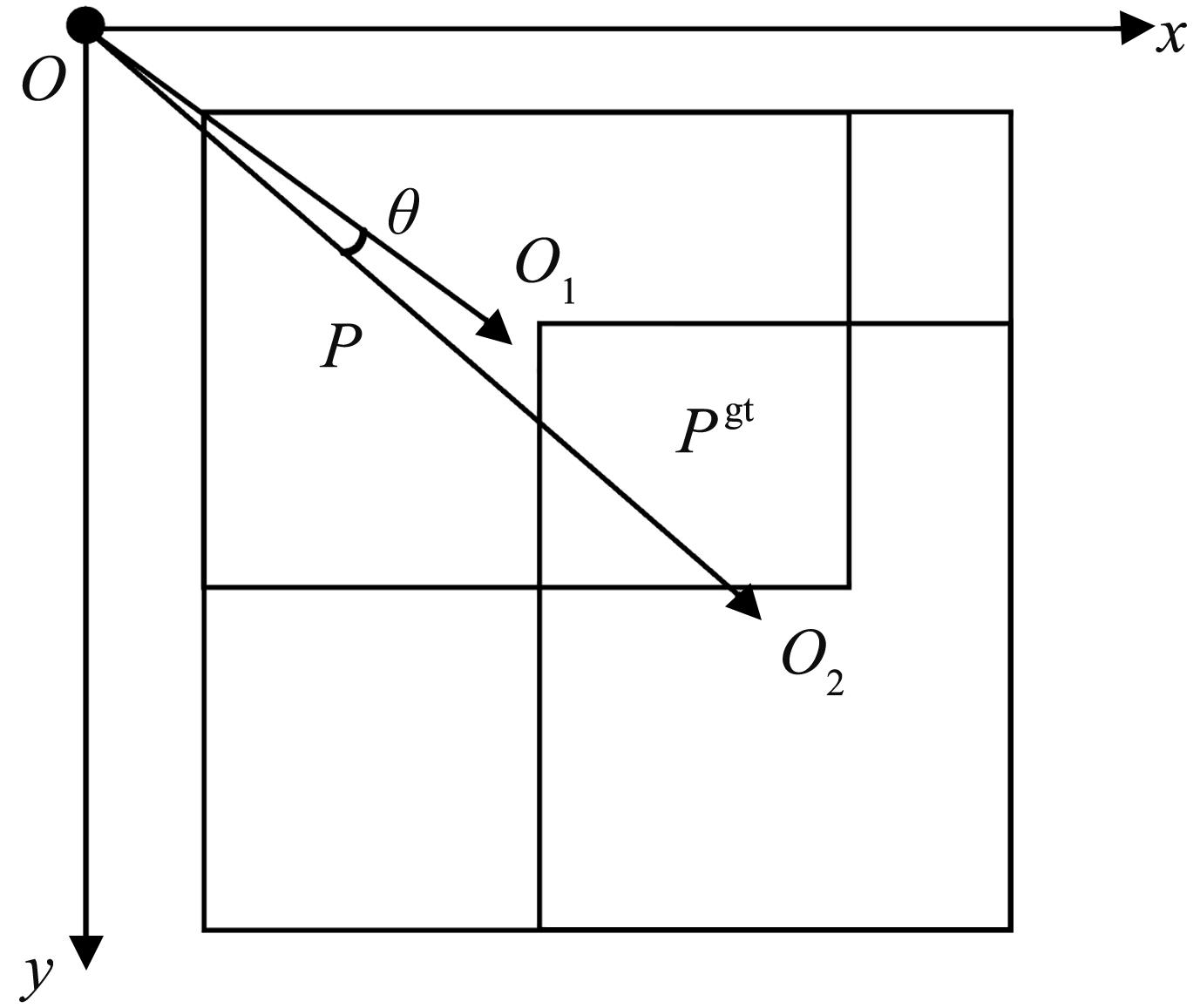
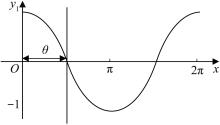
Fig. 8
Range of cosine similarity values
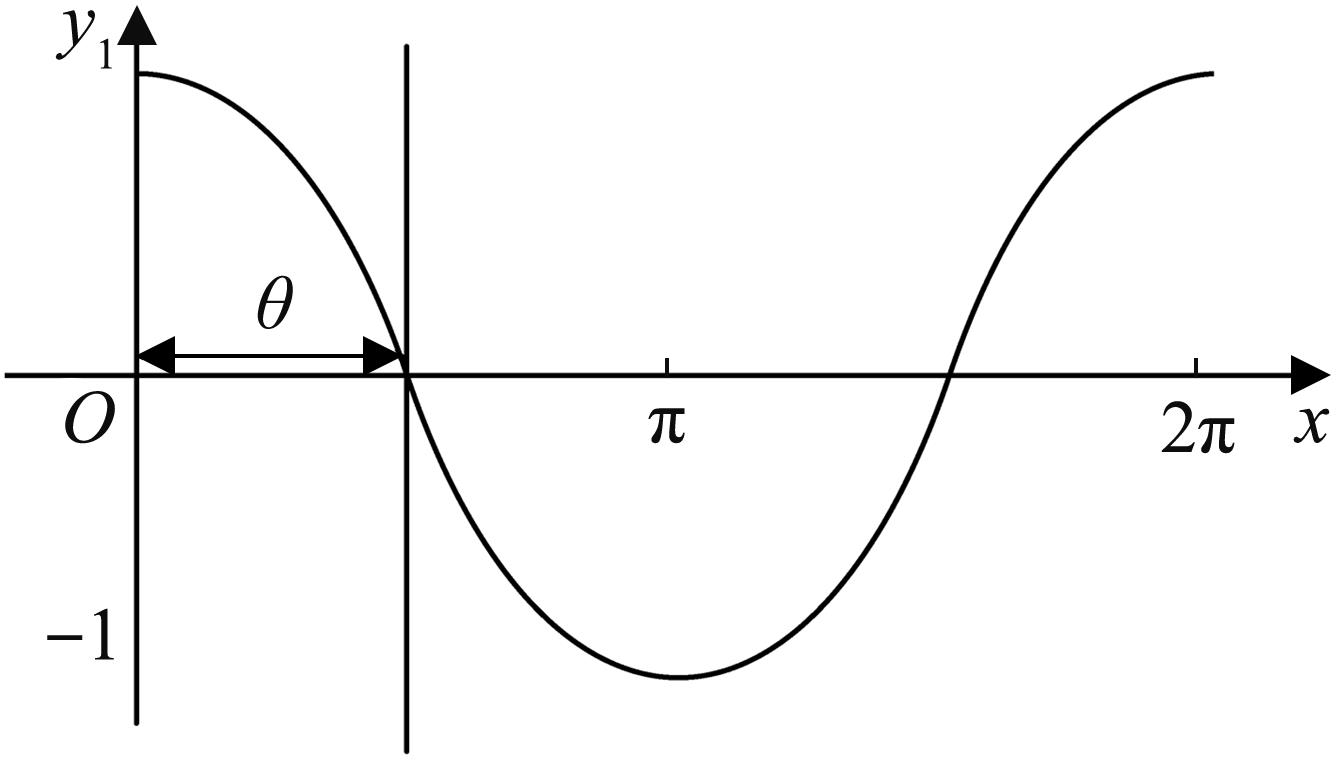
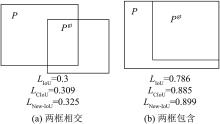
Fig. 9
Location of anchor box and target box
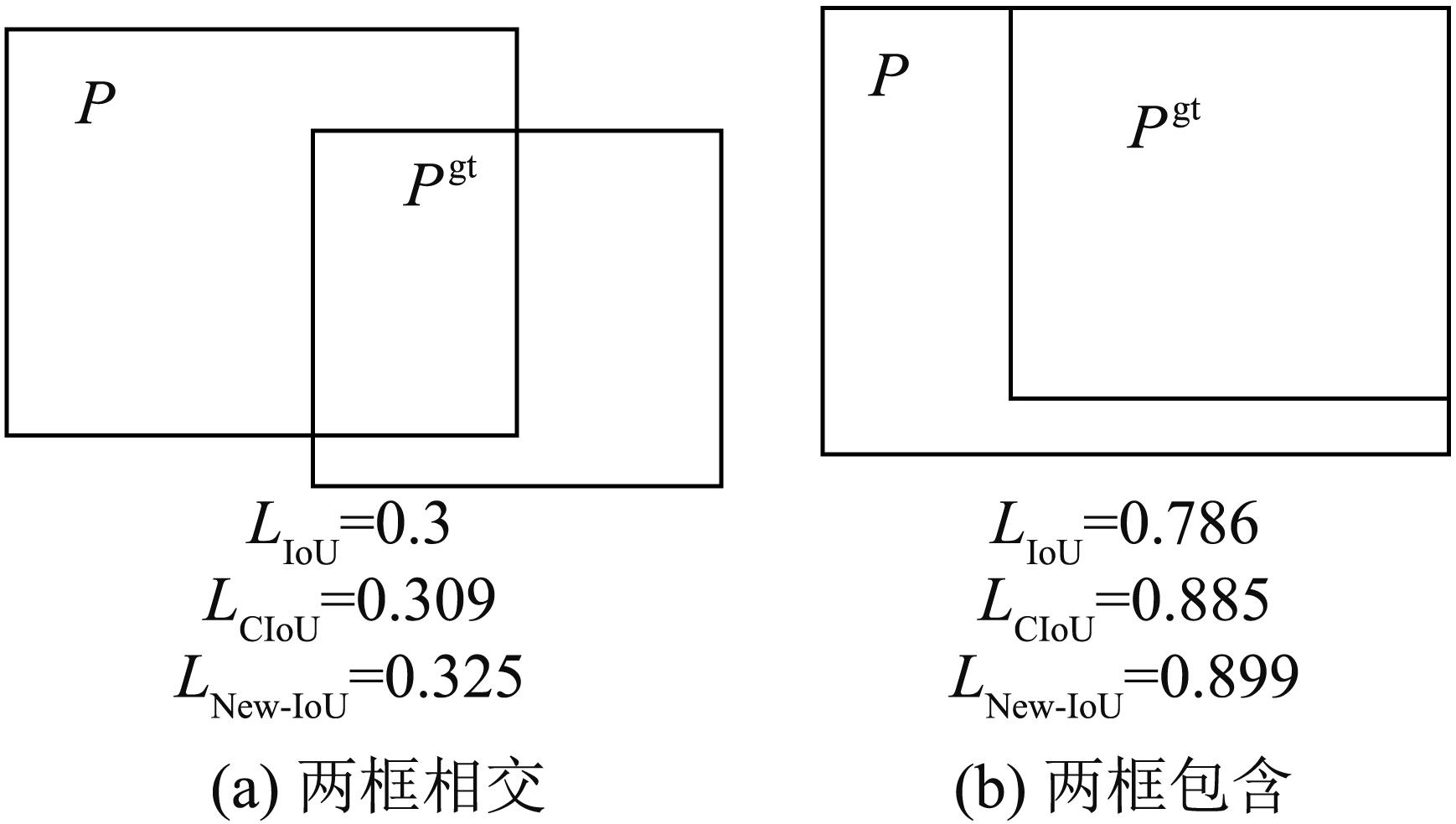

Fig. 10
Structure of YOLOv5s
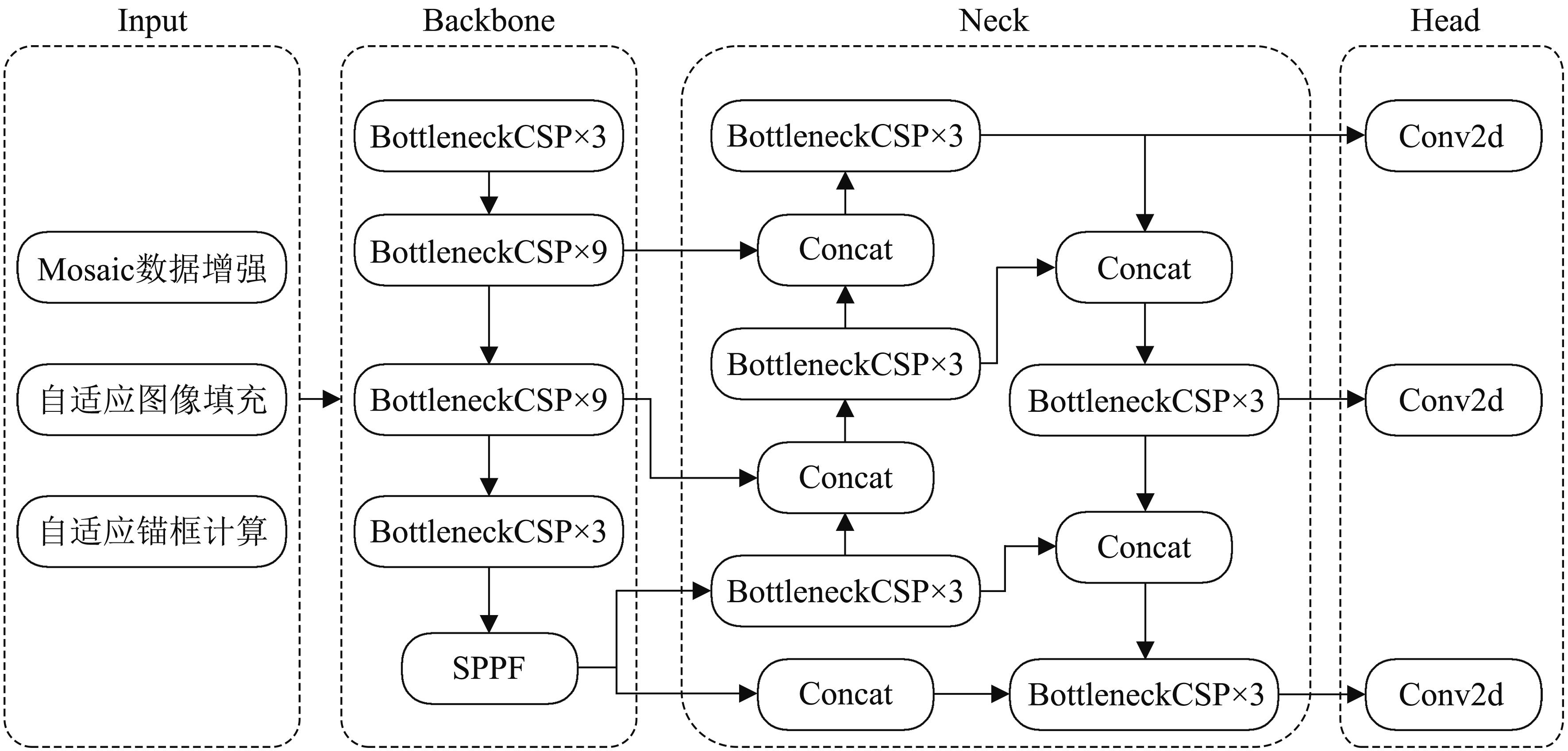
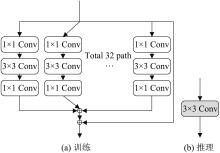
Fig. 11
Improved BottleneckCSP module
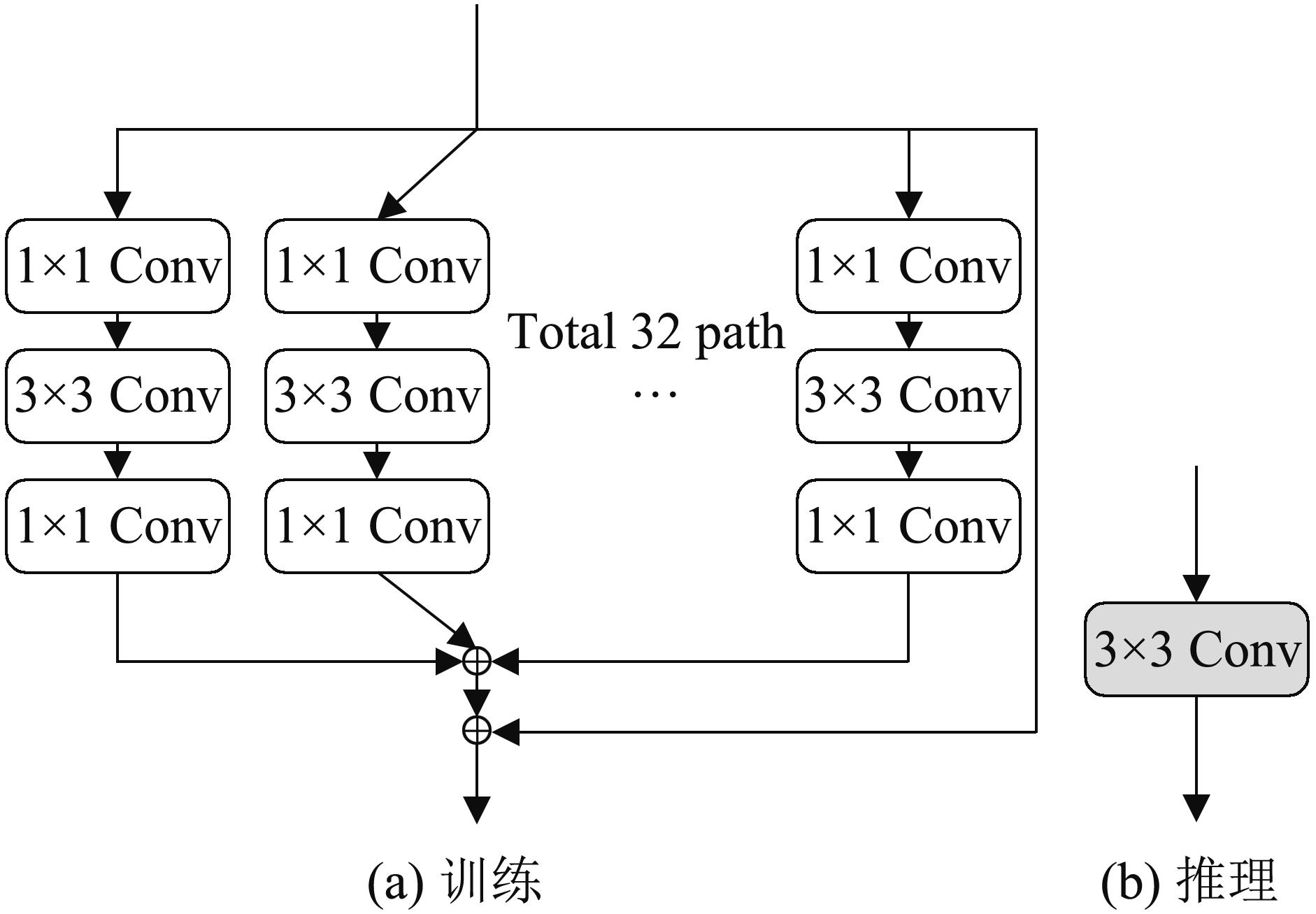
Table 1
Training results
| 损失函数 | 准确率 | 召回率 | mAP@.5 | mAP@.5:.95 |
|---|---|---|---|---|
| LCIoU | 0.952 | 0.893 | 0.957 | 0.837 |
| LNew-IoU | 0.956 | 0.980 | 0.974 | 0.856 |
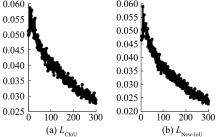
Fig. 12
Loss function plot for training set
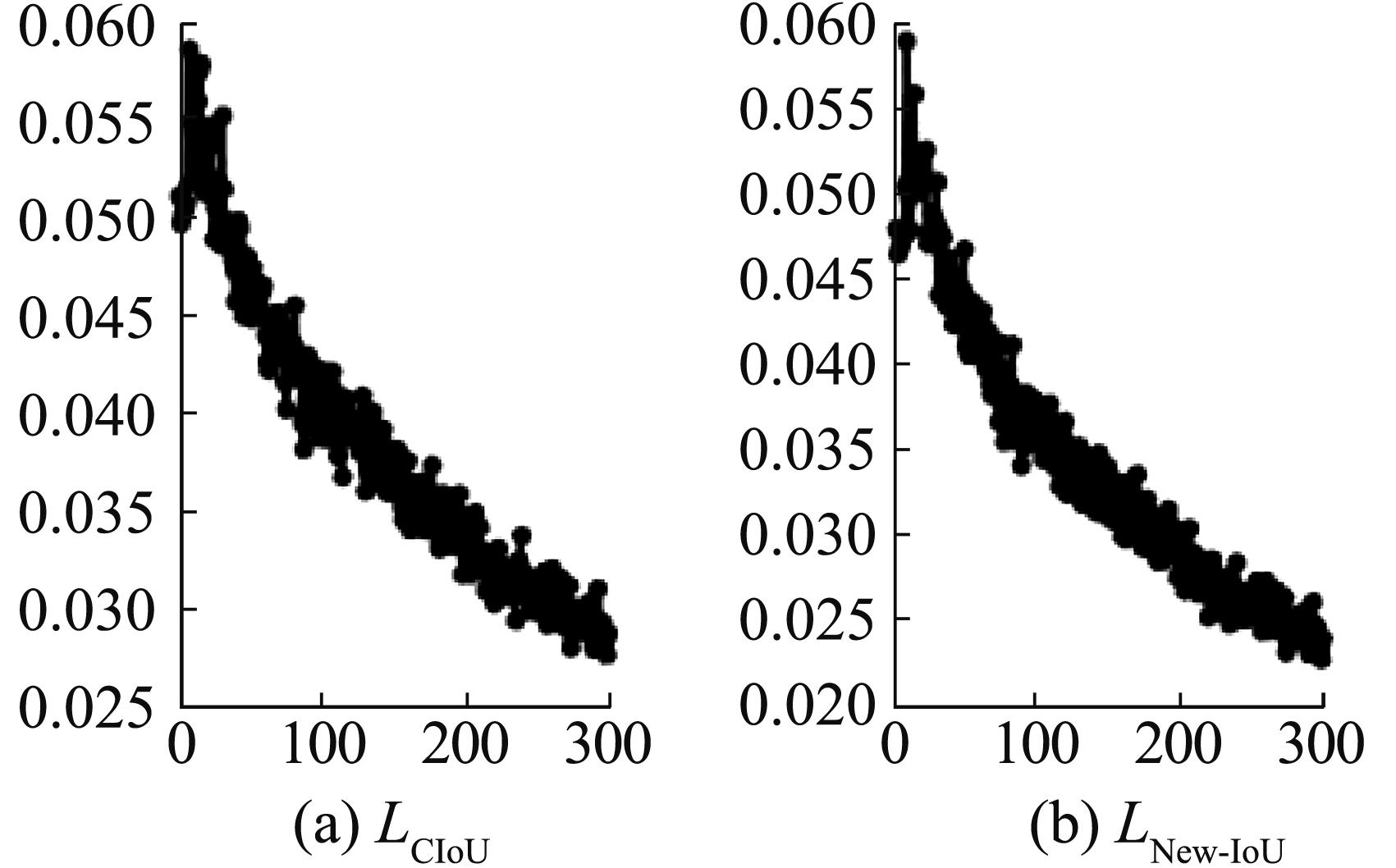
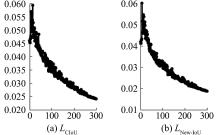
Fig. 13
Loss function plot for validation set
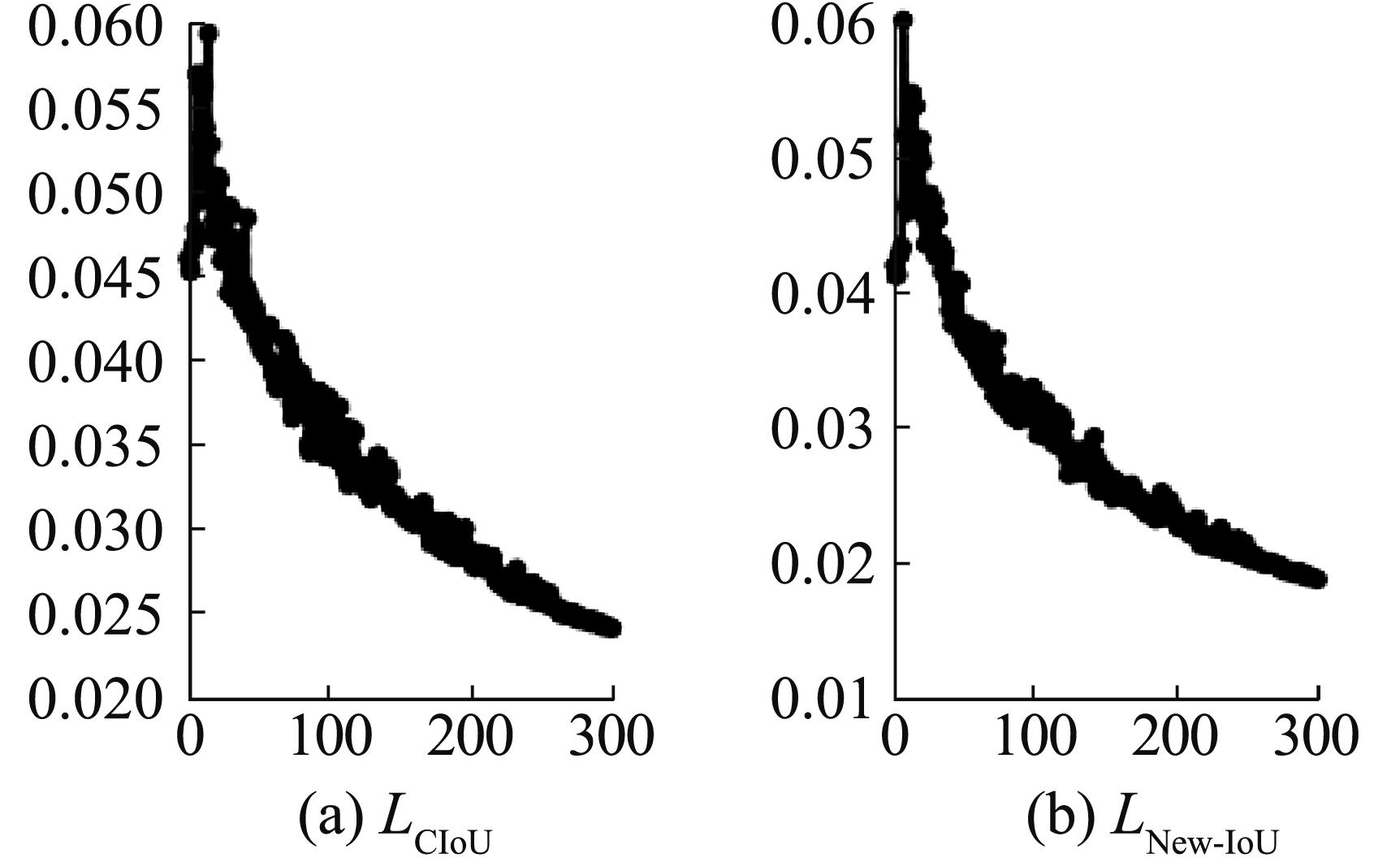
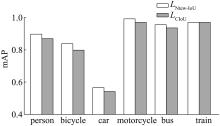
Fig. 14
Comparison of mAP in different loss functions
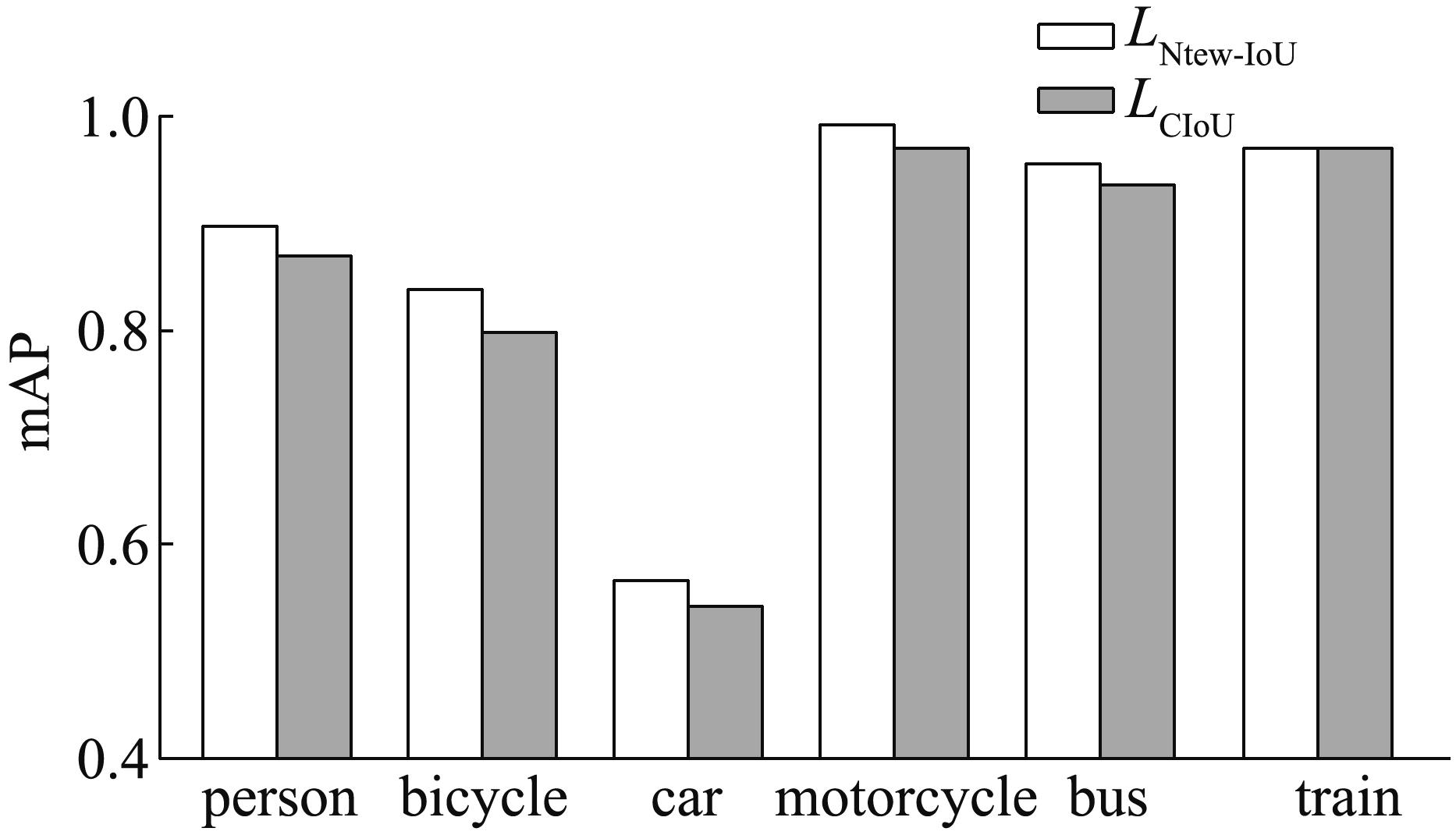
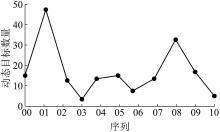
Fig. 15
Number of dynamic targets in KITTI dataset
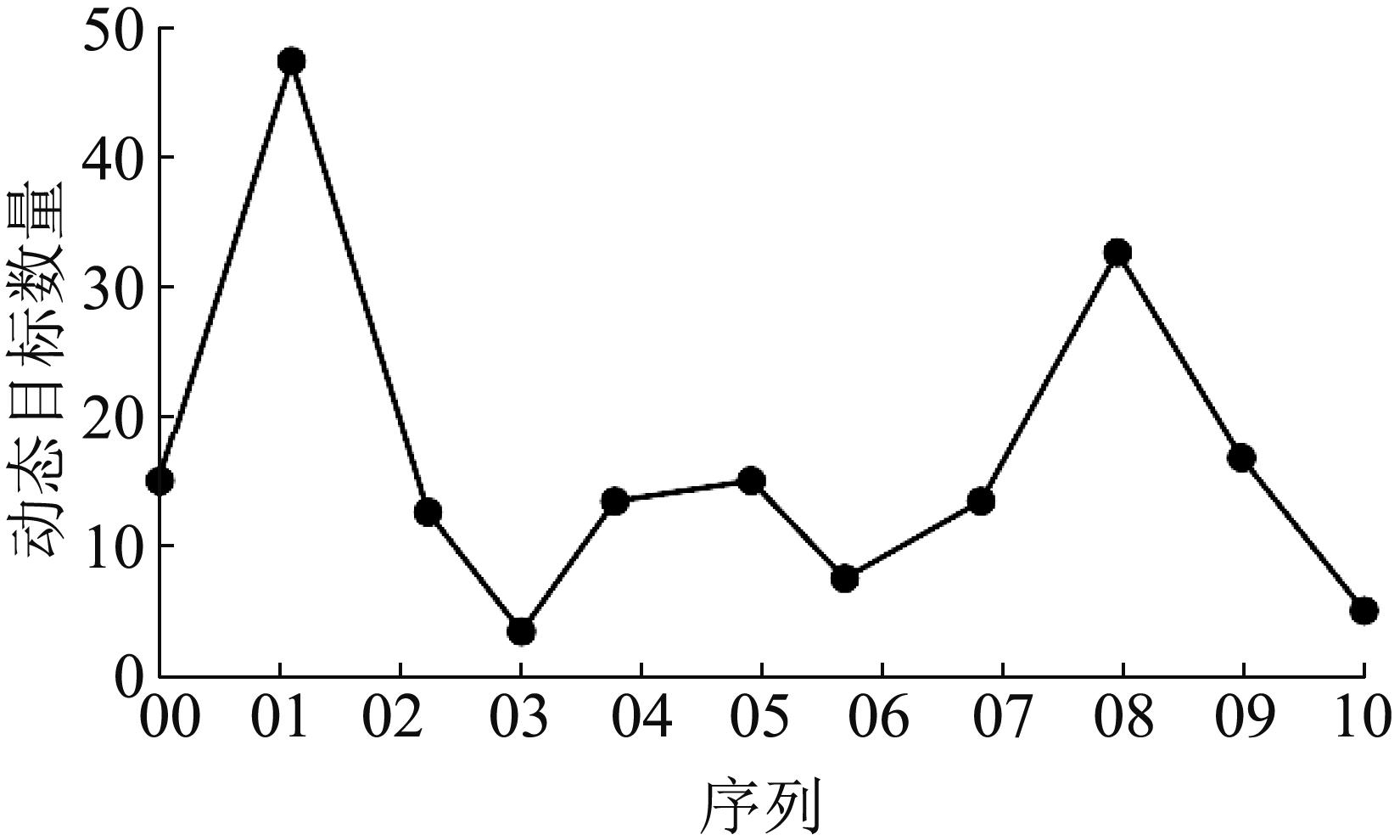

Fig. 16
Recognition effect on dynamic vehicles
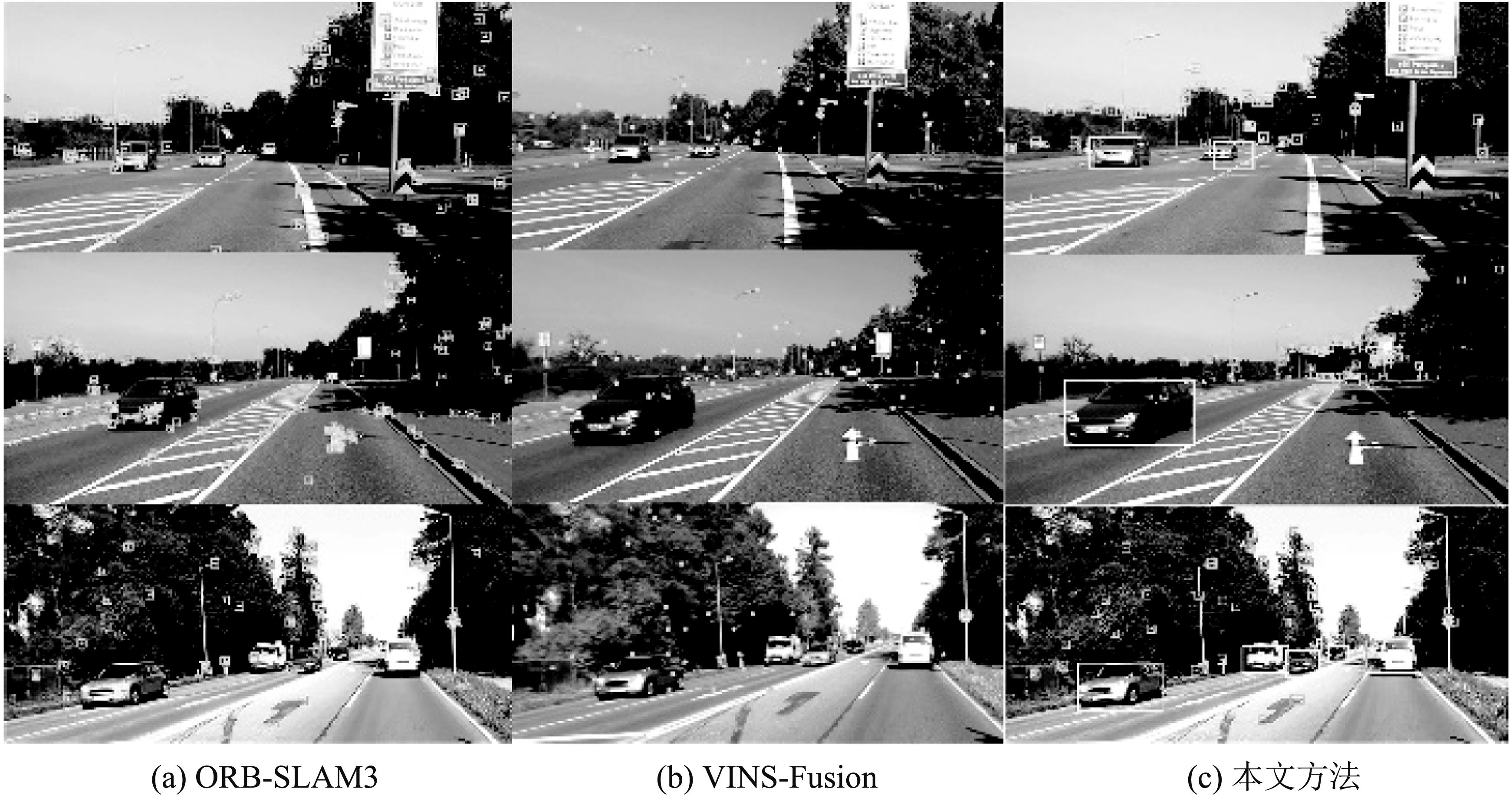

Fig. 17
Recognition effect on people
Table 2
Comparison of absolute trajectory error
| 序列 | 平均值 | 标准差 | 均方根误差 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM3 | 文献[ | 本文 | ORB-SLAM3 | 文献[ | 本文 | ORB-SLAM3 | 文献[ | 本文 | |
| 00 | 0.513 | 13.238 | 0.396 | 0.286 | 5.222 | 0.245 | 0.587 | 15.165 | 0.466 |
| 01 | ― | 6.505 | 2.021 | ― | 2.631 | 1.407 | ― | 7.017 | 2.462 |
| 02 | 0.735 | 9.155 | 0.727 | 0.535 | 6.015 | 0.618 | 0.907 | 10.594 | 0.954 |
| 03 | 0.042 | 0.865 | 0.025 | 0.042 | 0.267 | 0.019 | 0.059 | 0.906 | 0.032 |
| 04 | 0.043 | 0.247 | 0.006 | 0.022 | 0.126 | 0.003 | 0.048 | 0.277 | 0.007 |
| 05 | 0.164 | 5.997 | 0.185 | 0.056 | 3.093 | 0.075 | 0.173 | 6.748 | 0.200 |
| 06 | 0.513 | 3.157 | 0.434 | 0.286 | 1.786 | 0.259 | 0.587 | 3.627 | 0.505 |
| 07 | 0.229 | 1.353 | 0.175 | 0.114 | 1.515 | 0.101 | 0.256 | 2.484 | 0.212 |
| 08 | 4.770 | 4.913 | 3.758 | 3.743 | 3.432 | 2.723 | 6.063 | 5.993 | 4.641 |
| 09 | 0.608 | 4.866 | 0.287 | 0.570 | 3.953 | 0.126 | 0.834 | 6.269 | 0.314 |
| 10 | 0.293 | 3.158 | 0.379 | 0.295 | 1.778 | 0.331 | 0.474 | 3.753 | 0.503 |
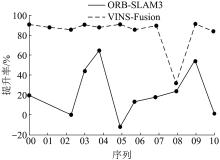
Fig. 18
Rate of improvement of absolute trajectory error
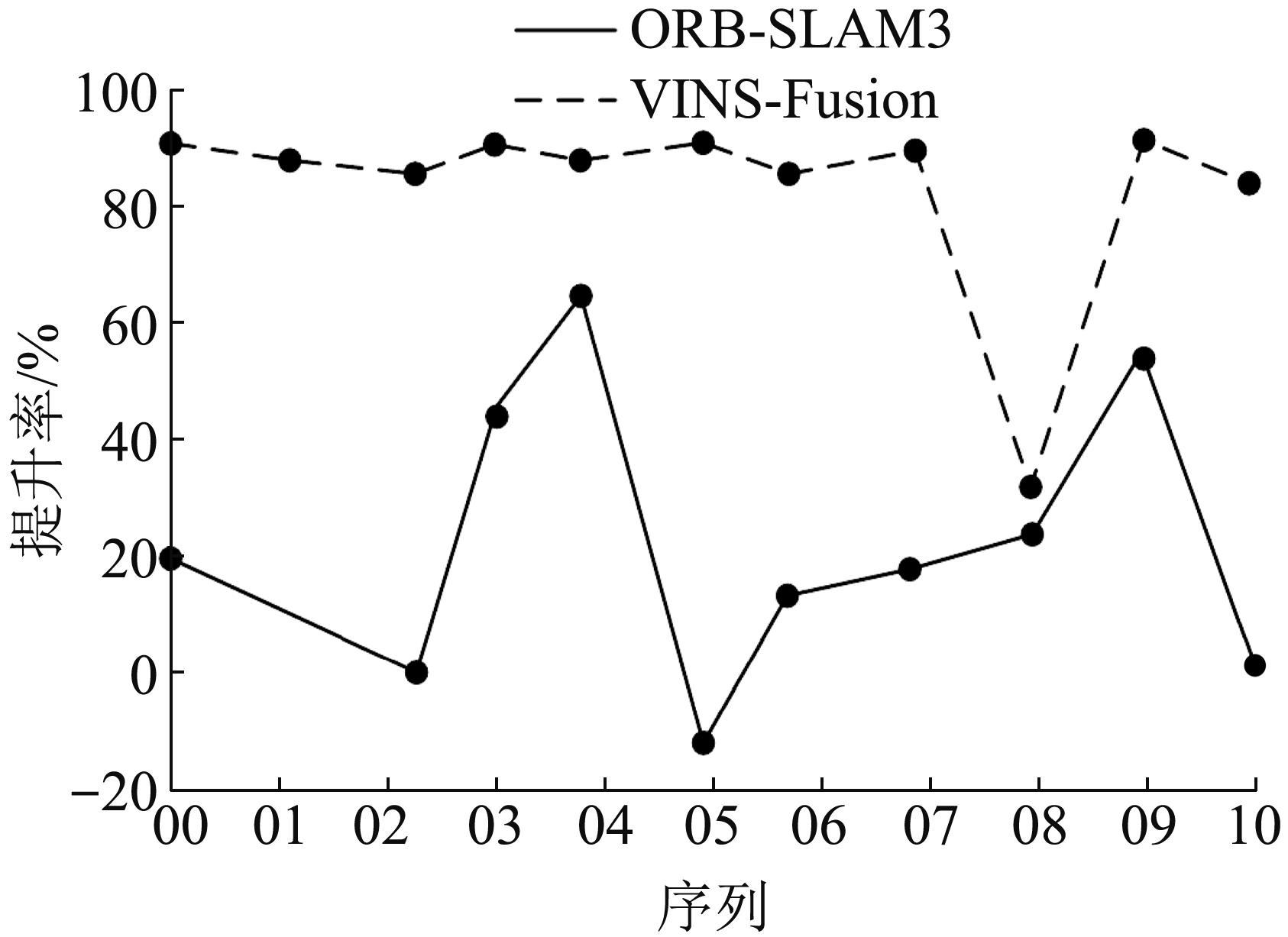

Fig. 19
Sequence 02
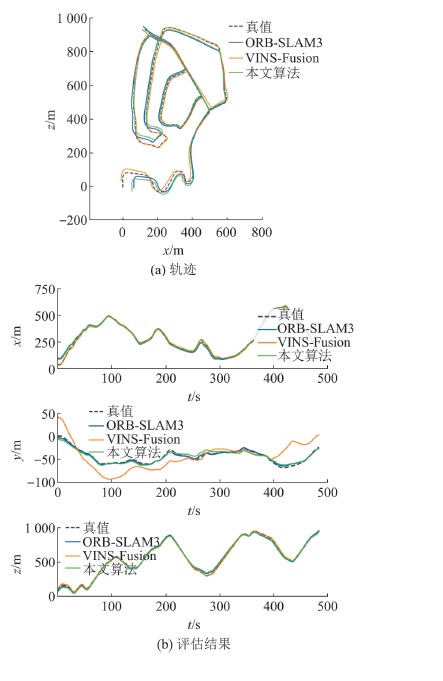

Fig. 20
Sequence 06

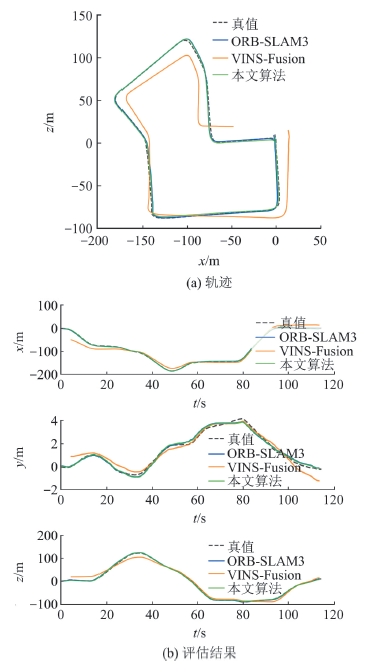
Fig. 21
Sequence 09
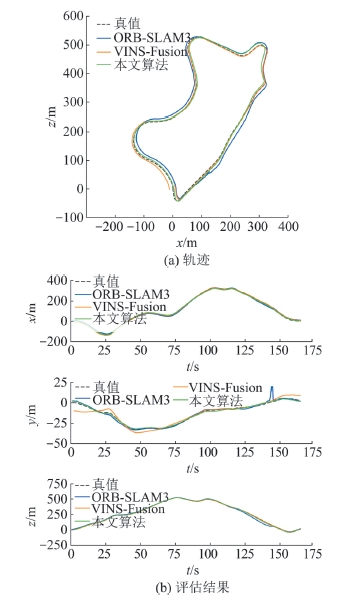
Table 3
Comparison of relative trajectory error
| 序列 | 均方根误差/% | 旋转误差/((˚)/m) | ||||
|---|---|---|---|---|---|---|
| ORB-SLAM3 | 文献[ | 本文 | ORB-SLAM3 | 文献[ | 本文 | |
| 00 | 1.334 | 1.791 | 1.468 | 0.767 | 0.216 | 0.474 |
| 01 | ― | 3.632 | 0.958 | ― | 0.064 | 2.352 |
| 02 | 0.692 | 1.207 | 0.166 | 0.272 | 0.158 | 0.302 |
| 03 | 0.591 | 1.174 | 0.403 | 0.107 | 0.058 | 0.169 |
| 04 | 0.669 | 0.617 | 0.552 | 0.147 | 0.046 | 0.14 |
| 05 | 1.022 | 0.988 | 1.347 | 0.328 | 0.077 | 0.497 |
| 06 | 2.601 | 0.797 | 1.607 | 0.229 | 0.057 | 0.193 |
| 07 | 1.122 | 0.812 | 1.126 | 0.191 | 0.075 | 0.182 |
| 08 | 10.855 | 1.479 | 6.392 | 0.184 | 0.072 | 0.19 |
| 09 | 4.113 | 1.612 | 1.041 | 0.282 | 0.067 | 0.246 |
| 10 | 2.022 | 1.318 | 1.504 | 0.183 | 0.083 | 0.186 |

Fig. 22
Sequence 04
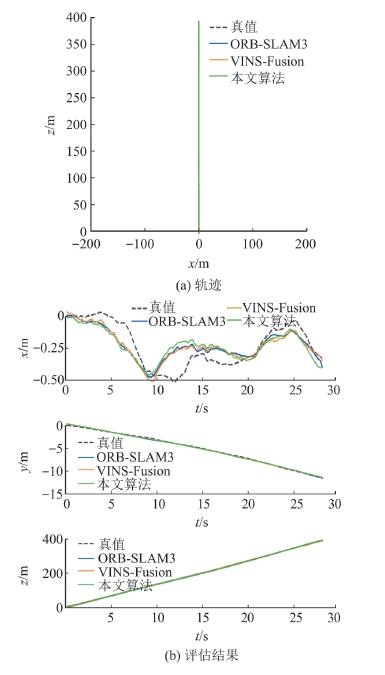

Fig. 23
Sequence 07
Comparison of object detection optimization
| 序列 | 平均值 | 标准差 | 均方根误差 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM3 | O+Y | 本文方法 | ORB-SLAM3 | O+Y | 本文方法 | ORB-SLAM3 | O+Y | 本文方法 | |
| 04 | 0.043 | 0.034 | 0.006 | 0.022 | 0.02 | 0.003 | 0.048 | 0.039 | 0.007 |
| 07 | 0.229 | 0.377 | 0.175 | 0.114 | 0.237 | 0.101 | 0.256 | 0.446 | 0.212 |
Table 5
Tracking time comparison
| 序列 | ORB-SLAM3 | 本文算法 | ||
|---|---|---|---|---|
| 中位数 | 平均数 | 中位数 | 平均数 | |
| 平均值 | 24.5 | 26.6 | 29.8 | 30.9 |
| 03 | 24.7 | 26.6 | 28.9 | 30.2 |
| 06 | 24.4 | 26.5 | 29.9 | 31.4 |
| 07 | 24.5 | 26.7 | 30.5 | 31.1 |
Table 6
Frame rate comparison
| 序列 | ORB-SLAM3 | 本文算法 |
|---|---|---|
| 平均值 | 37.6 | 32.2 |
| 03 | 37.6 | 33.0 |
| 06 | 37.7 | 31.7 |
| 07 | 37.5 | 32.0 |
| 1 | Davison A J, Reid I D, Molton N D, et al. MonoSLAM: Real-time Single Camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067. |
| 2 | 张良桥, 陈国良, 许晓东, 等. 一种用于图像特征提取的改进ORB-SLAM算法[J]. 测绘通报, 2019(3): 16-20. |
| Zhang Liangqiao, Chen Guoliang, Xu Xiaodong, et al. An Improved ORB-SLAM Algorithm for Feature Extraction[J]. Bulletin of Surveying and Mapping, 2019(3): 16-20. | |
| 3 | Zhou Lipu, Wang Shengze, Kaess M. DPLVO: Direct Point-line Monocular Visual Odometry[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7113-7120. |
| 4 | Ban Xicheng, Wang Hongjian, Chen Tao, et al. Monocular Visual Odometry Based on Depth and Optical Flow Using Deep Learning[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-19. |
| 5 | Li Jinquan, Pei Ling, Zou Danping, et al. Attention-SLAM: A Visual Monocular SLAM Learning from Human Gaze[J]. IEEE Sensors Journal, 2021, 21(5): 6408-6420. |
| 6 | Lee Sehyung, Lim Jongwoo, Il Hong Suh. Progressive Feature Matching: Incremental Graph Construction and Optimization[J]. IEEE Transactions on Image Processing, 2020, 29: 6992-7005. |
| 7 | 胡立华, 左威健, 张继福. 采用逆近邻与影响空间的图像特征误匹配剔除方法[J]. 计算机辅助设计与图形学学报, 2022, 34(3): 449-458. |
| Hu Lihua, Zuo Weijian, Zhang Jifu. A Mismatch Elimination Method Based on Reverse Nearest Neighborhood and Influence Space[J]. Journal of Computer-Aided Design & Computer Graphics, 2022, 34(3): 449-458. | |
| 8 | 任彬, 宋海丽, 赵增旭, 等. 基于RANSAC的视觉里程计优化方法研究[J]. 仪器仪表学报, 2022, 43(6): 205-212. |
| Ren Bin, Song Haili, Zhao Zengxu, et al. Study on Optimization Method of Visual Odometry Based on RANSAC[J]. Chinese Journal of Scientific Instrument, 2022, 43(6): 205-212. | |
| 9 | 盛超, 潘树国, 赵涛, 等. 基于图像语义分割的动态场景下的单目SLAM算法[J]. 测绘通报, 2020(1): 40-44. |
| Sheng Chao, Pan Shuguo, Zhao Tao, et al. Monocular SLAM System in Dynamic Scenes Based on Image Semantic Segmentation[J]. Bulletin of Surveying and Mapping, 2020(1): 40-44. | |
| 10 | Chang Jianfang, Dong Na, Li Donghui. A Real-time Dynamic Object Segmentation Framework for SLAM System in Dynamic Scenes[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-9. |
| 11 | 刘瑞军, 王向上, 张晨, 等. 基于深度学习的视觉SLAM综述[J]. 系统仿真学报, 2020, 32(7): 1244-1256. |
| Liu Ruijun, Wang Xiangshang, Zhang Chen, et al. A Survey on Visual SLAM Based on Deep Learning[J]. Journal of System Simulation, 2020, 32(7): 1244-1256. | |
| 12 | 张翠文, 张长伦, 何强, 等. 目标检测中框回归损失函数的研究[J]. 计算机工程与应用, 2021, 57(20): 97-103. |
| Zhang Cuiwen, Zhang Changlun, He Qiang, et al. Research on Loss Function of Box Regression in Object Detection[J]. Computer Engineering and Applications, 2021, 57(20): 97-103. | |
| 13 | Rezatofighi H, Tsoi N, Gwak J Y, et al. Generalized Intersection over Union: A Metric and a Loss for Bounding Box Regression[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2019: 658-666. |
| 14 | Zheng Zhaohui, Wang Ping, Ren Dongwei, et al. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| 15 | Xue Hongtao, Wu Meng, Zhang Ziming, et al. Intelligent Diagnosis of Mechanical Faults of In-wheel Motor Based on Improved Artificial Hydrocarbon Networks[J]. ISA Transactions, 2022, 120: 360-371. |
| 16 | Zoph B, Vasudevan V, Shlens J, et al. Learning Transferable Architectures for Scalable Image Recognition[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway, NJ, USA: IEEE, 2018: 8697-8710. |
| 17 | Ding Xiaohan, Zhang Xiangyu, Ma Ningning, et al. RepVGG: Making VGG-style ConvNets Great Again[C]//2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2021: 13728-13737. |
| 18 | Campos Carlos, Elvira Richard, J Gómez Rodríguez Juan, et al. ORB-SLAM3: An Accurate Open-source Library for Visual, Visual-inertial, and Multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 19 | 艾青林, 刘刚江, 徐巧宁. 动态环境下基于改进几何与运动约束的机器人RGB-D SLAM算法[J]. 机器人, 2021, 43(2): 167-176. |
| Ai Qinglin, Liu Gangjiang, Xu Qiaoning. An RGB-D SLAM Algorithm for Robot Based on the Improved Geometric and Motion Constraints in Dynamic Environment[J]. Robot, 2021, 43(2): 167-176. | |
| 20 | Shao Chunyan, Zhang Chi, Fang Zaojun, et al. A Deep Learning-based Semantic Filter for RANSAC-based Fundamental Matrix Calculation and the ORB-SLAM System[J]. IEEE Access, 2020, 8: 3212-3223. |
| 21 | João Carlos Virgolino Soares, Gattass Marcelo, Marco Antonio Meggiolaro. Visual SLAM in Human Populated Environments: Exploring the Trade-off between Accuracy and Speed of YOLO and Mask R-CNN[C]//2019 19th International Conference on Advanced Robotics (ICAR). Piscataway, NJ, USA: IEEE, 2019: 135-140. |
| 22 | Bescos Berta, Fácil José M, Civera Javier, et al. DynaSLAM: Tracking, Mapping, and Inpainting in Dynamic Scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. |
| 23 | Geiger A, Lenz P, Stiller C, et al. Vision Meets Robotics: The KITTI Dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 24 | Wang Ke, Cao Chuan, Ma Sai, et al. An Optimization-Based Multi-sensor Fusion Approach Towards Global Drift-free Motion Estimation[J]. IEEE Sensors Journal, 2021, 21(10): 12228-12235. |
| [1] | Cao Mingwei, Wang Fengna, Wang Zilong, Zhao Haifeng. Neural Radiance Fields Based on Explicit Feature Matching and Scaled Dot-product Attention [J]. Journal of System Simulation, 2026, 38(3): 572-583. |
| [2] | Zhu He, Zhou Feng, Zhang Qi, Zhu Mengxiao, Dai Ju. PL-Mamba: A 3D Point Cloud Semantic Segmentation Network Based on Bimodal Fusion [J]. Journal of System Simulation, 2026, 38(1): 73-83. |
| [3] | Li Mingyu, Lin Jiaquan. Lightweight Driver Face Object Detection Algorithm Based on YOLOv8-DF [J]. Journal of System Simulation, 2025, 37(8): 2103-2114. |
| [4] | Yang Lu, Pei Junying. Aerial Target Detection Algorithm Fused with Multi-scale Features [J]. Journal of System Simulation, 2025, 37(6): 1486-1498. |
| [5] | Li Jie, Liu Yang, Li Liang, Su Bengan, Wei Jialong, Zhou Guangda, Shi Yanmin, Zhao Zhen. Remote Sensing Small Object Detection Based on Cross-stage Two-branch Feature Aggregation [J]. Journal of System Simulation, 2025, 37(4): 1025-1040. |
| [6] | Jiang Limei, Chen Xinwei. Visual SLAM Algorithm Based on Feature Point Selection in Dynamic Scenes [J]. Journal of System Simulation, 2025, 37(3): 753-762. |
| [7] | Wu Shuheng, Liu Yongkui, Zhang Lin, Xiao Yingying, Wang Lihui. Lightweight Assembly Workpiece Detection Algorithm Based on Improved YOLOv8 [J]. Journal of System Simulation, 2025, 37(12): 3099-3111. |
| [8] | Yao Wanye, Pang Zewei, Sun Peijie, Wang Zhu. Research on ORB-SLAM Algorithm Based on Windowed Matching Estimation [J]. Journal of System Simulation, 2024, 36(9): 2032-2042. |
| [9] | Lu Bin, Wang Minghan, Sun Yang, Yang Zhenyu. Global-local Fusion for Efficient 3D Object Detection [J]. Journal of System Simulation, 2024, 36(11): 2616-2630. |
| [10] | Wang Gaihua, Li Kehong, Long Qian, Yao Jingxuan, Zhu Bolun, Zhou Zhengshu, Pan Xuran. Object Detection of Lightweight Transformer Based on Knowledge Distillation [J]. Journal of System Simulation, 2024, 36(11): 2517-2527. |
| [11] | Su Tong, Wang Ying, Deng Qiyang, Li Zhaobin. Improved Foggy Pedestrian and Vehicle Detection Algorithm Based on YOLOv5 [J]. Journal of System Simulation, 2024, 36(10): 2413-2422. |
| [12] | Yang Zhe, Cui Yinghan, Guo Lingxi, Li Jiaxin, Wu Xusheng. Search Technology for Aircraft Debris Integrating Data Augmentation and Deep Learning Algorithm [J]. Journal of System Simulation, 2024, 36(10): 2238-2245. |
| [13] | Dong Qingqing, Wu Hao, Qian Wenhua, Kong Fengling. RGB-D Saliency Object Detection Based on Cross-refinement and Circular Attention [J]. Journal of System Simulation, 2023, 35(9): 1931-1947. |
| [14] | Xu Renjie, Zhang Xiaoming, Wang Chen, Wu Peng. Research on 3D Object Detection Method with Cross-module Attention [J]. Journal of System Simulation, 2023, 35(12): 2680-2691. |
| [15] | Jinghui Yang, Dekang Liu, Wanhe Du, Lining Xing. Research on Binocular Ranging System Based on Image Features [J]. Journal of System Simulation, 2022, 34(3): 624-632. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
