

Journal of System Simulation ›› 2023, Vol. 35 ›› Issue (4): 709-720.doi: 10.16182/j.issn1004731x.joss.21-1273
• Papers • Previous Articles Next Articles
Yecai Guo( ), Cheng Liu
), Cheng Liu
Received:2021-12-22
Revised:2022-03-16
Online:2023-04-29
Published:2023-04-12
CLC Number:
Yecai Guo, Cheng Liu. Adaptive Correction Tracking Algorithm Based on Detector and Locator Fusion[J]. Journal of System Simulation, 2023, 35(4): 709-720.

Fig. 1
Structure of VGGNet19
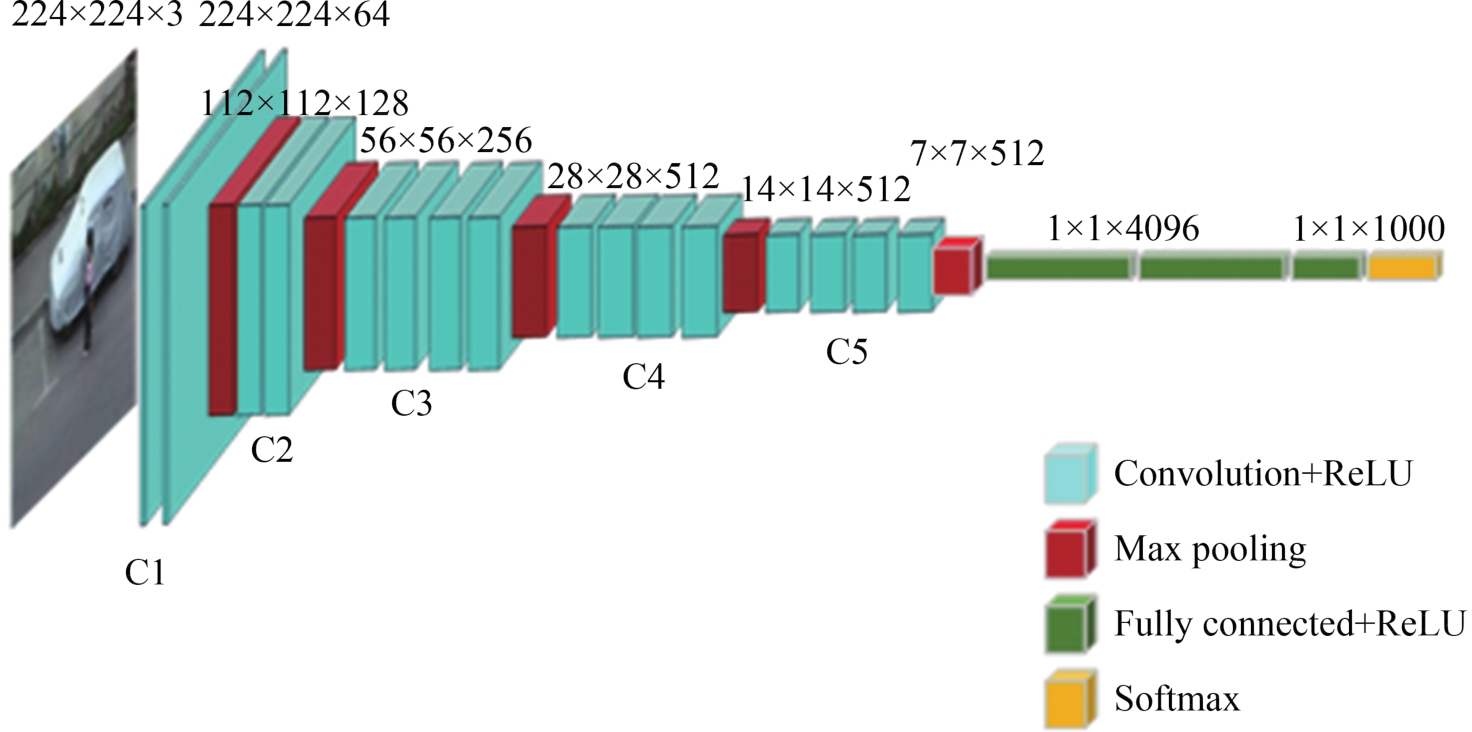
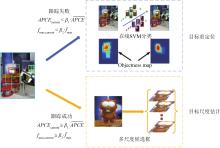
Fig. 2
Adaptive correction strategy diagram
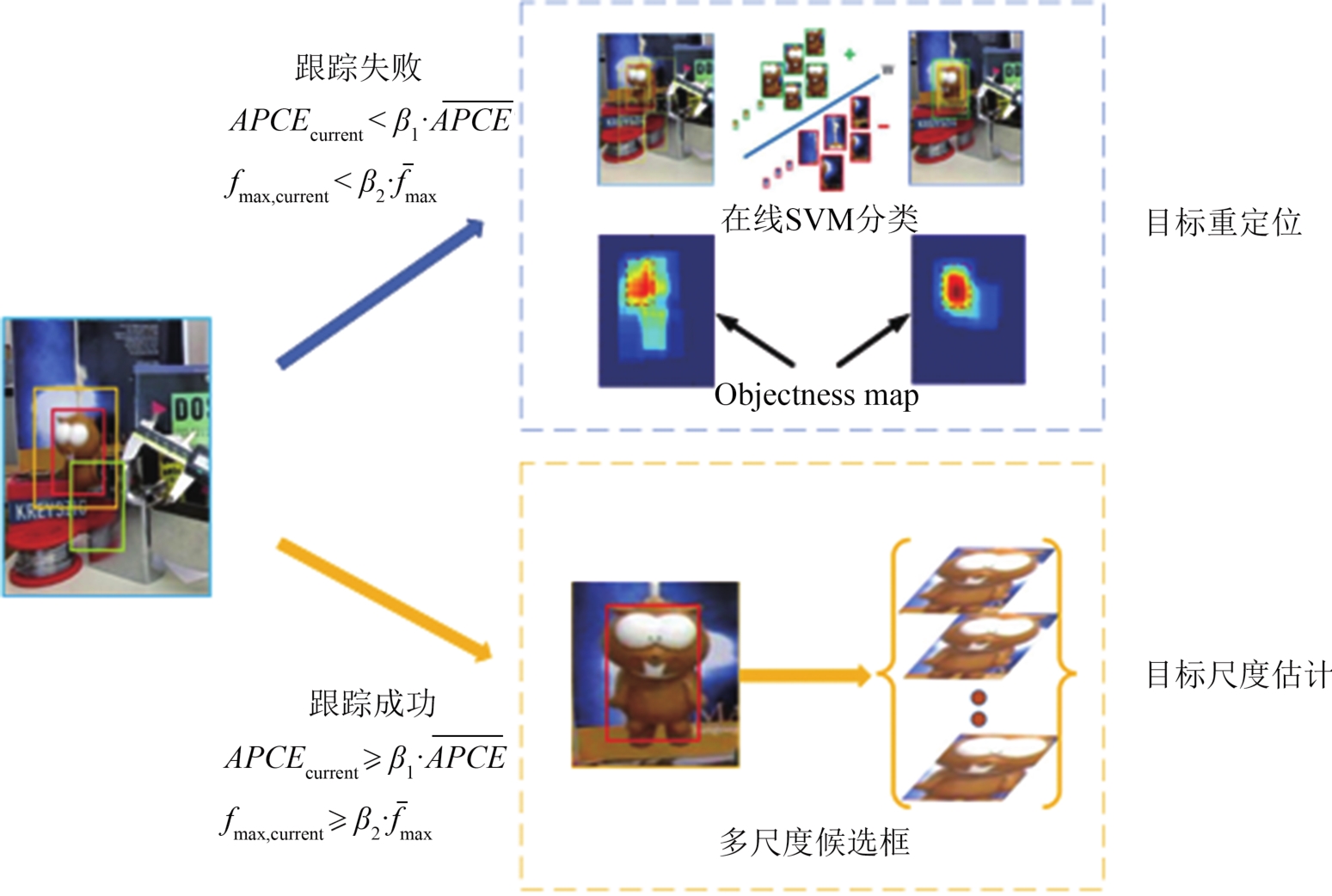

Fig. 3
Comparison of center pixel errors
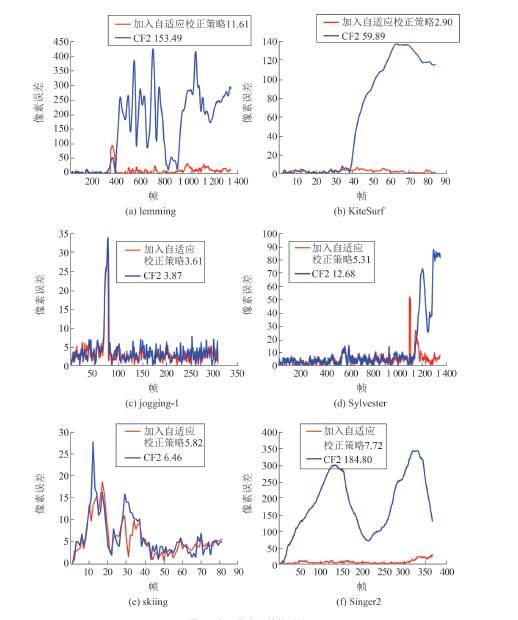
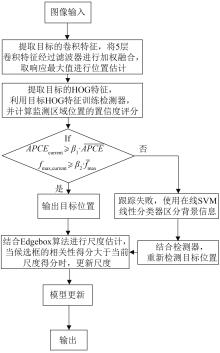
Fig. 4
Algorithm flow chart of this article
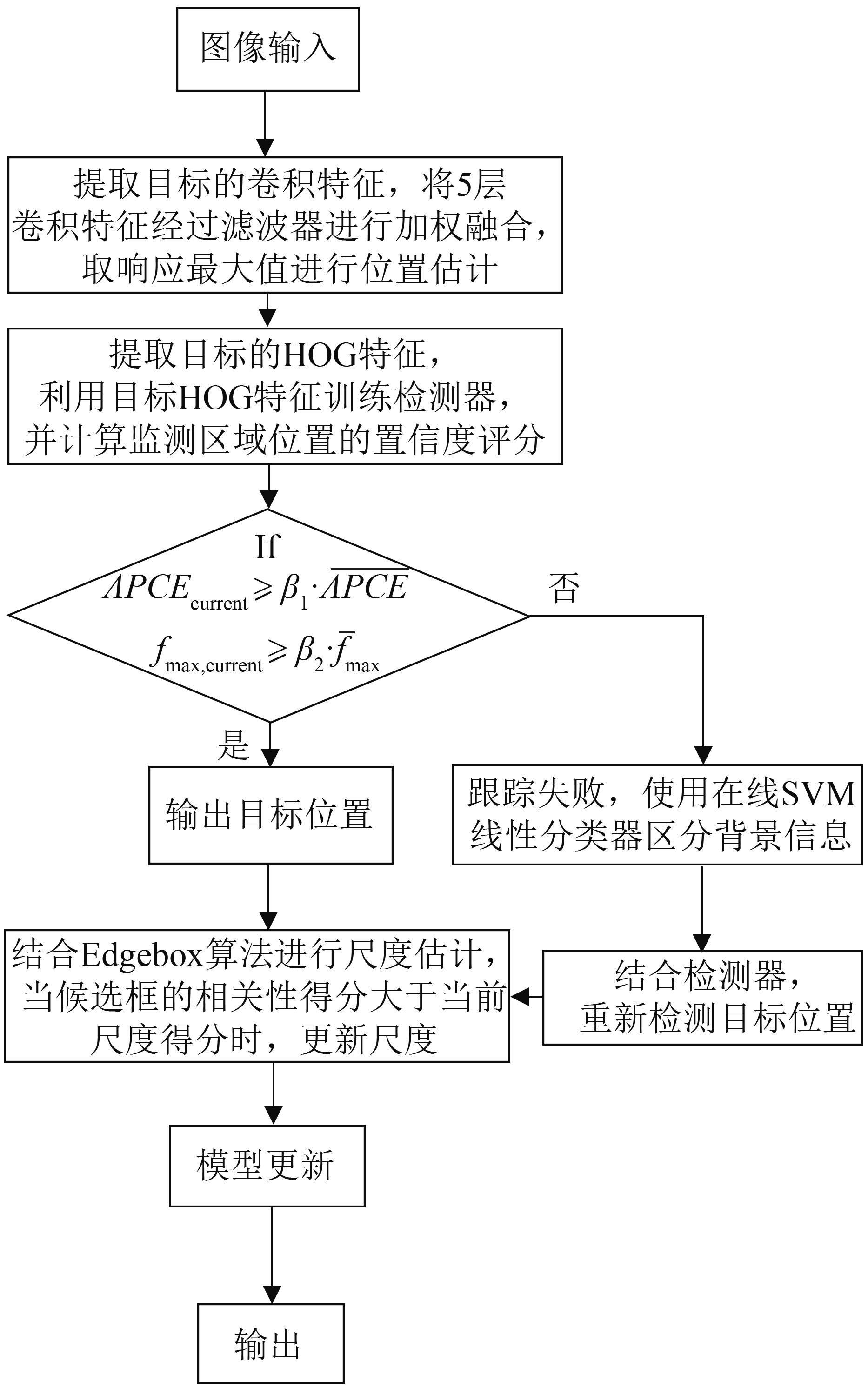

Fig. 5
Ablation experiments of convolutional layers
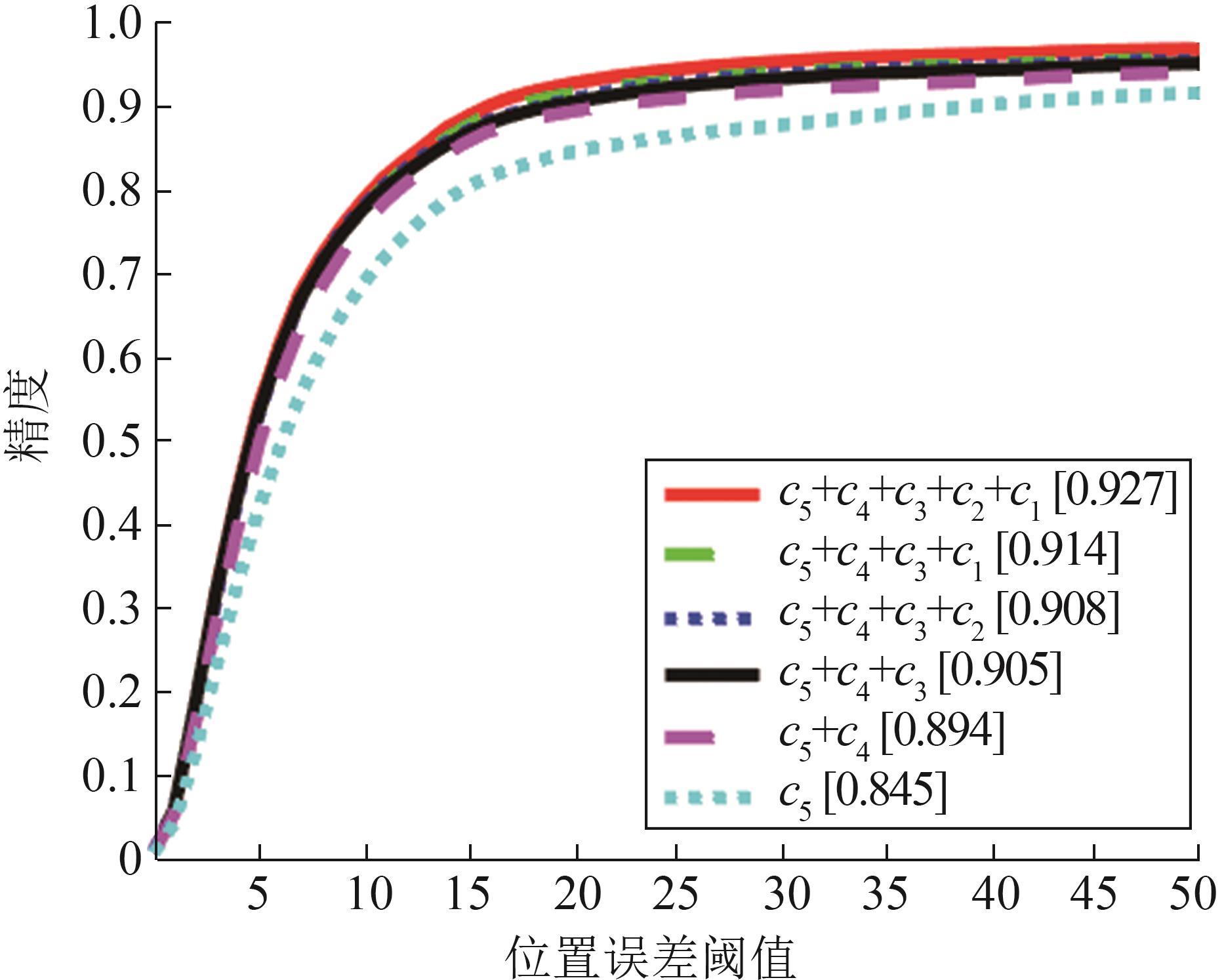
Fig. 6
Threshold debug for β1 and β2
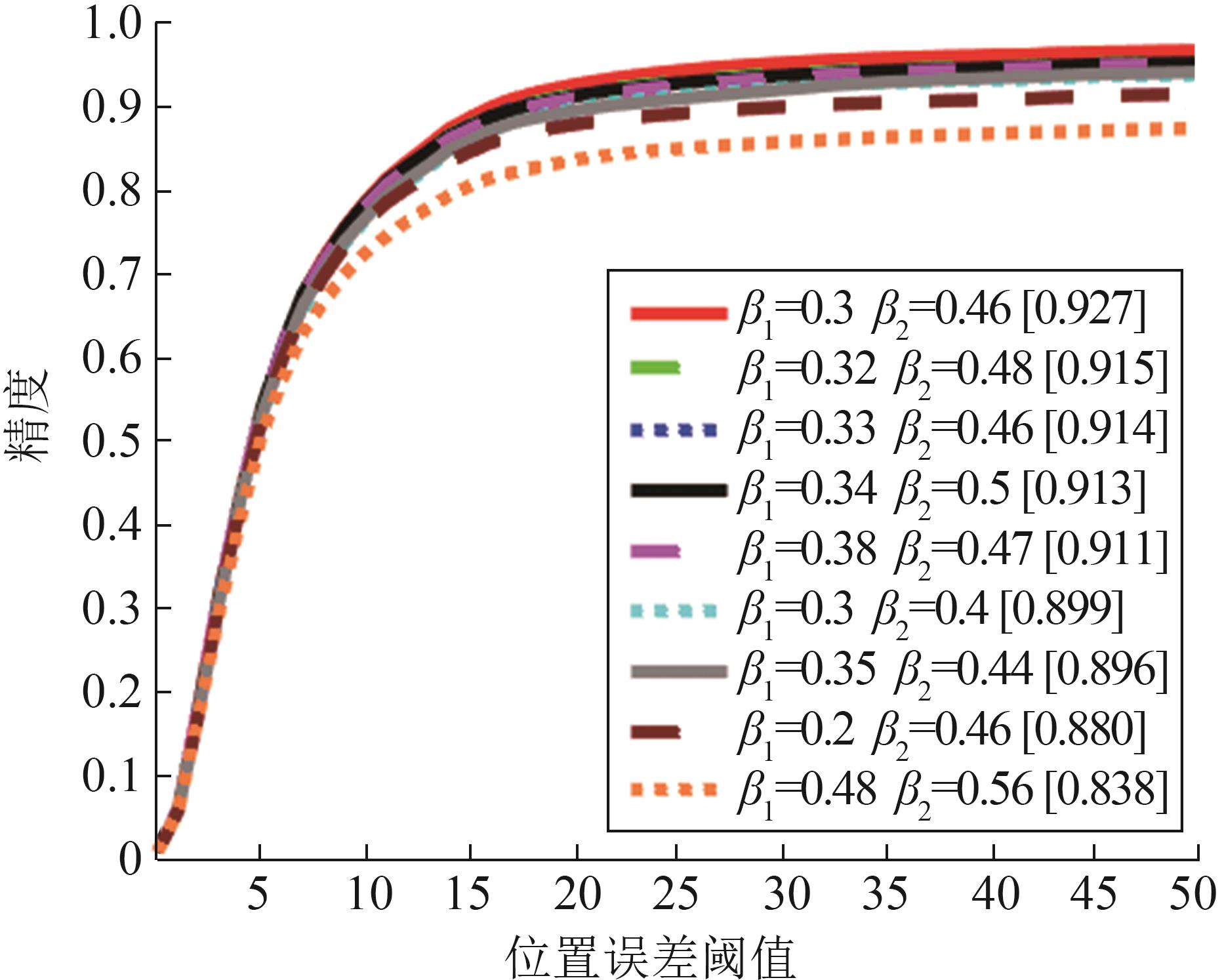
Fig. 7
Comparison of accuracy and success rate of each algorithm in OTB2013 dataset


Fig. 8
Comparison of accuracy and success rate of each algorithm in OTB2015 dataset
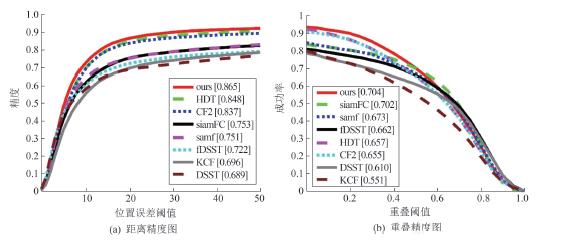
Table 1
Comparison of 11 challenge attributes of each algorithm in OTB2015 dataset
| 算法 | BC | DEF | FM | IPR | IV | LR | MB | OCC | OV | OPR | SV |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 本文 | 0.883 | 0.810 | 0.822 | 0.884 | 0.884 | 0.760 | 0.817 | 0.787 | 0.707 | 0.841 | 0.816 |
| HDT | 0.844 | 0.821 | 0.802 | 0.844 | 0.820 | 0.740 | 0.794 | 0.774 | 0.663 | 0.805 | 0.811 |
| CF2 | 0.843 | 0.791 | 0.792 | 0.854 | 0.817 | 0.763 | 0.797 | 0.767 | 0.677 | 0.807 | 0.802 |
| siamFC | 0.705 | 0.661 | 0.722 | 0.742 | 0.703 | 0.749 | 0.676 | 0.661 | 0.664 | 0.733 | 0.731 |
| samf | 0.689 | 0.686 | 0.667 | 0.721 | 0.714 | 0.678 | 0.677 | 0.728 | 0.627 | 0.738 | 0.710 |
| fDSST | 0.779 | 0.611 | 0.690 | 0.727 | 0.746 | 0.586 | 0.700 | 0.640 | 0.578 | 0.666 | 0.667 |
| KCF | 0.713 | 0.617 | 0.620 | 0.701 | 0.719 | 0.505 | 0.618 | 0.630 | 0.501 | 0.677 | 0.639 |
| DSST | 0.715 | 0.561 | 0.569 | 0.708 | 0.738 | 0.568 | 0.608 | 0.614 | 0.480 | 0.658 | 0.648 |

Fig. 9
Visualization of each algorithm on 5 groups of video sequences

| 1 | 李琪, 墨瀚林, 王向东, 等. 短道速滑场景下的多目标跟踪与运动仿真[J]. 系统仿真学报, 2021, 33(5): 1039-1050. |
| Li Qi, Mo Hanlin, Wang Xiangdong, et al. Multiple Object Tracking and Kinematic Simulation for Short Track Speed Skating[J]. Journal of System Simulation, 2021, 33(5): 1039-1050. | |
| 2 | 侯志强, 陈立琳, 余旺盛, 等. 基于双模板Siamese网络的鲁棒视觉跟踪算法[J]. 电子与信息学报, 2019, 41(9): 2247-2255. |
| Hou Zhiqiang, Chen Lilin, Yu Wangsheng, et al. Robust Visual Tracking Algorithm Based on Siamese Network with Dual Templates[J]. Journal of Electronics & Information Technology, 2019, 41(9): 2247-2255. | |
| 3 | Bertinetto L, Valmadre J, Henriques J F, et al. Fully-Convolutional Siamese Networks for Object Tracking[C]//European Conference On Computer Vision. Cham: Springer, 2016: 850-865. |
| 4 | Li B, Wu W, Wang Q, et al. Siamrpn++: Evolution of Siamese Visual Tracking with Very Deep Networks[C]//IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 4282-4291. |
| 5 | Liu Y, Li R, Cheng Y, et al. Object Tracking Using Spatio-Temporal Networks for Future Prediction Location[C]//European Conference on Computer Vision. Cham: Springer, 2020: 1-17. |
| 6 | Bhat G, Danelljan M, Van Gool L, et al. Know Your Surroundings: Exploiting Scene Information for Object Tracking[C]//European Conference on Computer Vision. Cham: Springer, 2020: 205-221. |
| 7 | Danelljan M, Bhat G, Shahbaz Khan F, et al. Eco: Efficient Convolution Operators for TRacking[C]//IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 6638-6646. |
| 8 | Dai K, Wang D, Lu H, et al. Visual Tracking via Adaptive Spatially-Regularized Correlation Filters[C]//IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 4670-4679. |
| 9 | Ma C, Huang J B, Yang X K, et al. Hierarchical Convolutional Features for Visual Tracking[C]//IEEE International Conference on Computer Vision. Santiago, Chile: IEEE, 2015: 3074-3082. |
| 10 | Kalal Z, Mikolajczyk K, Matas J. Tracking-Learning-Detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence(S0162-8828), 2011, 34(7): 1409-1422. |
| 11 | Hong Z, Chen Z, Wang C, et al. Multi-store Tracker (muster): A Cognitive Psychology Inspired Approach to Object Tracking[C]//IEEE Conference on Computer Vision and Pattern Recognition. Boston: IEEE, 2015: 749-758. |
| 12 | Ma C, Yang X, Zhang C, et al. Long-term Correlation Tracking[C]//IEEE Conference on Computer Vision and Pattern Recognition. Boston: IEEE, 2015: 5388-5396. |
| 13 | Ma C, Huang J B, Yang X, et al. Adaptive Correlation Filters with Long-term and Short-term Memory for Object Tracking[J]. International Journal of Computer Vision(S0920-5691), 2018, 126(8): 771-796. |
| 14 | Ma C, Huang J, Yang X, et al. Robust Visual Tracking via Hierarchical Convolutional Features[J]. Proceedings of the IEEE Transactions on Pattern Analysis and Machine Intelligence(S0162-8828), 2018, 41(11): 2709-2723. |
| 15 | Henriques J F, Caseiro R, Martins P, et al. High-speed Tracking with Kernelized Correlation Filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence(S0162-8828), 2014, 37(3): 583-596. |
| 16 | Lu X, Ma C, Ni B, et al. Adaptive Region Proposal with Channel Regularization for Robust Object Tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology(S 10518215), 2019, 31(4): 1268-1282. |
| 17 | 卫鑫, 武淑红, 王耀力. 基于深度卷积长短期记忆网络的森林火灾烟雾检测模型[J]. 计算机应用, 2019, 39(10): 2883-2887. |
| Wei Xin, Wu Shuhong, Wang Yaoli. Forest Fire Smoke Detection Model Based on Deep Convolution Long Short-term Memory Network[J]. Journal of Computer Applications, 2019, 39(10): 2883-2887. | |
| 18 | 徐亮, 张江, 张晶, 等. 基于VGG网络的鲁棒目标跟踪算法[J]. 计算机工程与科学, 2020, 42(8): 1406-1413. |
| Xu Liang, Zhang Jiang, Zhang Jing, et al. A Robust Target Tracking Algorithm Based on VGG Network[J]. Computer Engineering & Science, 2020, 42(8): 1406-1413. | |
| 19 | 魏永强, 杨小军. 深度特征的核相关滤波视觉跟踪[J]. 计算机工程与应用, 2020, 56(15): 147-152. |
| Wei Yongqiang, Yang Xiaojun. Kernel Correlation Filtering Visual Tracking of Deep Feature[J]. Computer Engineering and Applications, 2020, 56(15): 147-152. | |
| 20 | Wang M, Liu Y, Huang Z. Large Margin Object Tracking with Circulant Feature Maps[C]//IEEE Conference on Computer Vision and Pattern Recognition. Honolulu: IEEE, 2017: 4021-4029. |
| 21 | Zitnick C L, Dollar P. Edge Boxes: Locating Object Proposals from Edges[C]//European Conference on Computer Vision. Cham: Springer, 2014: 391-405. |
| 22 | Qi Y, Zhang S, Qin L, et al. Hedged Deep Tracking[C]//IEEE Conference On Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 4303-4311. |
| 23 | Danelljan M, Häger G, Khan F S, et al. Discriminative Scale Space Tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence(S0162-8828), 2016, 39(8): 1561-1575. |
| 24 | Bertinetto L, Valmadre J, Henriques J F, et al. Fully-convolutional Siamese Networks for Object Tracking[C]//European Conference on Computer Vision. Cham: Springer, 2016: 850-865. |
| 25 | Li Y, Zhu J. A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration[C]//European Conference on Computer Vision. Cham: Springer, 2014: 254-265. |
| 26 | Danelljan M, Häger G, Khan F, et al. Accurate Scale Estimation for Robust Visual Tracking[C]//British Machine Vision Conference, September 1-5, 2014. Nottingham: Bmva Press, 2014. |
| [1] | Jiang Haosheng, Wu Fangfang, Huang Zexian, Ma Ziyue, Dong Chunyun, Ping Xubin. Trajectory Planning and Tracking for Multi-quadcopter in Dynamic Obstacle Environments [J]. Journal of System Simulation, 2025, 37(8): 2089-2102. |
| [2] | Chen Tao, Liu Jianxuan, Wang Lizhong, Zou Xiangjun, Li Xiaojuan. Research on Non-singular Fast Integral Terminal Sliding Mode Trajectory Tracking Control of Six-axis Robotic Arm [J]. Journal of System Simulation, 2025, 37(8): 2115-2123. |
| [3] | Zhang Jingyi, Chen Xin, Ding Jingang, Luo Jianguo, Feng shuo. Finite-time Robust Anti-disturbance Control for Steer-by-wire System [J]. Journal of System Simulation, 2025, 37(6): 1376-1387. |
| [4] | Huang Jie, Huang Jie. An Intelligent Tracking Control Method for Unmanned Vehicles with Time-varying Disturbances [J]. Journal of System Simulation, 2025, 37(4): 1063-1075. |
| [5] | Li Bin, Wang Yuchuo. Fault Diagnosis Method for Photovoltaic Systems Based on Multi-strategy Fusion [J]. Journal of System Simulation, 2025, 37(12): 3018-3032. |
| [6] | Liu Peijin, Fu Xuefeng, Sun Haofeng, He Lin, Liu Shujie. A Highly Robust Target Tracking Algorithm Merging CNN and Transformer [J]. Journal of System Simulation, 2024, 36(8): 1854-1868. |
| [7] | Qiu Yunfei, Bu Xiangrui, Zhang Boqiang. Dynamic Spatio-temporal Anomaly-aware Correlation Filtering Object Tracking Algorithm [J]. Journal of System Simulation, 2024, 36(2): 338-351. |
| [8] | Ma Yun, Wang Yuan, Li Meng, Wang Peng, Tang Yanling. Robust Predictive Control of Nonplanar Fully-actuated UAVs [J]. Journal of System Simulation, 2024, 36(2): 415-422. |
| [9] | Cheng Lei, Wang Haoyou, Chen Xinjie. Adaptive Tracking Control for Omnidirectional Vehicle Based on Characteristic Modeling [J]. Journal of System Simulation, 2024, 36(10): 2277-2287. |
| [10] | Guo Minghao, Ji Peng, Huang Haiwei. Unmanned Vehicle Path Planning and Tracking Control Based on Improved Artificial Potential Field Method [J]. Journal of System Simulation, 2024, 36(10): 2423-2434. |
| [11] | Wei Fang, Shuhong Xu, Lei Han, Zhangwenchi Li. Research and Application Progress of Tracking Registration Methods in AR Assembly [J]. Journal of System Simulation, 2023, 35(7): 1438-1454. |
| [12] | Yingxuan Li, Zhongxun Wang, Yunlong Dong. Two New Maneuvering Target Simulation Methods [J]. Journal of System Simulation, 2023, 35(7): 1581-1589. |
| [13] | Songming Jiao, Hui Ding, Yufei Zhong, Xin Yao, Jiahao Zheng. A UAV Target Tracking and Control Algorithm Based on SiamRPN [J]. Journal of System Simulation, 2023, 35(6): 1372-1380. |
| [14] | Dongyang Liu, Wenwen Zha, Liang Tao, Cheng Zhu, Lichuan Gu, Jun Jiao. Trajectory Control of Crawler Robot Based on LSTM and SMC [J]. Journal of System Simulation, 2023, 35(4): 747-759. |
| [15] | Yan Xiaohui, Yao Yuwu, Wu Yuhua, Xu Jiangxin. Adaptive Robust Trajectory Tracking Control for NSV with Multiple Stochastic Disturbances [J]. Journal of System Simulation, 2023, 35(11): 2359-2372. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
